CN1232247A - 重现装置和重现方法 - Google Patents
重现装置和重现方法 Download PDFInfo
- Publication number
- CN1232247A CN1232247A CN99102570A CN99102570A CN1232247A CN 1232247 A CN1232247 A CN 1232247A CN 99102570 A CN99102570 A CN 99102570A CN 99102570 A CN99102570 A CN 99102570A CN 1232247 A CN1232247 A CN 1232247A
- Authority
- CN
- China
- Prior art keywords
- track
- land
- signal
- circuit
- reproducer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/08—Disposition or mounting of heads or light sources relatively to record carriers
- G11B7/09—Disposition or mounting of heads or light sources relatively to record carriers with provision for moving the light beam or focus plane for the purpose of maintaining alignment of the light beam relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B19/00—Driving, starting, stopping record carriers not specifically of filamentary or web form, or of supports therefor; Control thereof; Control of operating function ; Driving both disc and head
- G11B19/02—Control of operating function, e.g. switching from recording to reproducing
- G11B19/12—Control of operating function, e.g. switching from recording to reproducing by sensing distinguishing features of or on records, e.g. diameter end mark
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/002—Recording, reproducing or erasing systems characterised by the shape or form of the carrier
- G11B7/0037—Recording, reproducing or erasing systems characterised by the shape or form of the carrier with discs
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/007—Arrangement of the information on the record carrier, e.g. form of tracks, actual track shape, e.g. wobbled, or cross-section, e.g. v-shaped; Sequential information structures, e.g. sectoring or header formats within a track
Landscapes
- Optical Recording Or Reproduction (AREA)
- Optical Head (AREA)
Abstract
本发明提供一种装置和方法,能使第一张光盘与第二张光盘都得到回放。第一张光盘上的一个纹道的相对的两个侧面以第一个预定的频率摆动。第二张光盘上的一个纹道的相对的两个侧面中的一个侧面以低于第一个预定的频率的第二频率摆动,而这个纹道的另一侧面是一个扁平面。在该装置和方法中,可辨别出回放的目标光盘是第一张光盘,还是第二张光盘,并且根据辨别结果来切换各种伺服系统。
Description
发明涉及重现装置和重现方法。它们能回放第一张光盘和第二张光盘,在第一张光盘的纹道(groove)或纹间表面(land)的相对侧面上以第一预定频率形成摆动,在第二张光盘的纹道或纹间表面的一个侧面上以第二预定频率形成摆动。
传统上一张被称为述你光盘的光盘被认为是一张直径为64mm的磁光盘,其上提供的纹道以一预定的频率摆动,而且数据能被记录在摆动的纹道上。
上述迷你光盘的纹道上有按预定调制条件记录的地址信息。对迷你光盘的存取控制或对其可记录区域的检索是根据地址信息进行的。
上述迷你光盘允许最大压缩下74分钟的音频信号并具有超然卓越的便利性,因其便于携带并能高速率存取。为音频用途而用的迷你光盘以下被简称为MD-DA(数字化音频迷你光盘)。
但由于上述的迷你光盘FE产生电路有限的记录容量为140兆字节,因此它不足以用于记录图像信号。
再者,当格式MD-DATA1被用来在迷你光盘上记录计算机数据的格式时,存在进行修改和重现操作过程中速度慢的缺点。因为它的记录密度和FE产生电路140兆字节同样低,而比较之下最小的记录数据的长度却很长。
本发明的目的在于提供一种重现装置和重现方法。它通过对适合不同的磁光盘的伺服控制从而允许重现一张具有传统的数据格式MD-DA和MD-DATA1的磁光盘和另一张具有新型高密度记录数据格式MD-DATA2的磁光盘。
为实现上述目的,根据发明的一个方面,提供一种重现装置以有选择地回放第一张光盘和第二张光盘。在第一张光盘的每个纹道或纹间表面两侧上以第一频率构成摆动而信息被记录在摆动的纹道或纹间表面上。在第二张光盘的每个纹道或纹间表面两侧的一侧上以第二频率构成摆动,而光盘每一的纹道或纹间表面另一侧构成为平面,信息被记录在纹道和纹间表面上。包括一个光学头用以照亮预定的某一纹道或纹间表面及其他邻近预定纹道或纹间表面的纹间表面或纹道。第一检测装置检测从预定纹道或纹间表面过来的反射光,第二检测装置检测从相邻预定纹道或纹间表面的纹间表面或纹道过来的反射光,第一计算装置计算第一和第二检测装置的反射光的差异以产生第一跟踪误差信号,第二计算装置计算由第二检测装置所测出的从邻近预定纹道或纹间表面的两个不同的纹道或纹间表面过来的反射光的差异,辨别装置识别重现装置中启动的光盘是第一张光盘还是第二张光盘,跟踪控制装置当识别出启动的光盘为第一张光盘时,根据第一计算装置产生的第一跟踪误差信号进行跟踪控制,而当识别出启动的光盘为第二张光盘时,则根据第二计算装置产生的第二跟踪误差信号进行跟踪控制。
根据此项发明的另一方面,提供一种重现装置以供有选择地回放第一张光盘和第二张光盘。在第一张光盘的每一纹道或纹间表面两侧上以第一频率构成摆动,地址信息被预先记录在摆动的纹道或纹间表面上。在第二张光盘的每一纹道或纹间表面两侧的一侧上以第二频率构成摆动,而光盘的每一纹道或纹间表面另一侧面构成为平面,地址信息被预先记录在纹道和纹间表面上。包含一个光学头用以照亮预定的某一纹道或纹间表面及邻近预定纹道或纹间表面的纹间表面或纹道。检测装置在光学头的跟踪方向上被分为至少两个区域检测预定纹道或纹间表面的反射光和临近纹道或纹间表面的反射光,第一计算装置加入至少两个检测装置区域的检测输出,第二计算装置在至少的两个检测装置区域中用第二检测输出减去第一检测输出,辨别装置识别重现装置中启动的光盘是第一张光盘还是第二张光盘,选择装置交替地选择第一计算装置和第二计算装置,控制装置控制选择装置,当识别出装载的光盘为第一张光盘时,第一计算装置被选择,当识别出装载的光盘为第二张光盘时,第二计算装置被选择,地址提取装置根据选择装置所选的第一或第二计算装置的结果提取地址信息。
根据此项发明进一步的方面,提供一种重现方法以供有选择地回放第一张光盘和第二张光盘。在第一张光盘的每一纹道或纹间表面两侧上以第一频率构成摆动,信息被记录在摆动的纹道或纹间表面上。在第二张光盘的每一纹道或纹间表面两侧的一侧上以第二频率构成摆动,而光盘每一纹道或纹间表面另一侧面构成为平面,信息被记录在纹道和纹间表面上。包含了辨别步骤来识别回放的目的光盘是第一张光盘还是第二张光盘,当通过辨别步骤识别出回放的目的光盘为第一张光盘时,根据侧面光束产生跟踪误差信号,并根据产生的跟踪误差信号进行跟踪控制,当通过识别步骤识别出回放的目的光盘为第二张光盘时,根据主光束和侧面光束产生跟踪误差信号,并根据产生的跟踪误差信号进行跟踪控制。
有关这一发明的上述和其他目的、特征和优点将在下面结合附图的说明书和所附权利要求书中变得更加清楚,其中,相同的部件或元件用相同的参照号标示。
图1图解显示一张光盘的轨道结构,根据本发明该光盘能被用于重现装置;
图2A和2B分别是一张横截面图和一张平面图,用来显示放大比例的图1的轨道结构;
图3是媒体格式多样化的平面图释,根据本发明该格式能被用于重现装置;
图4为一方框图用来表示在本发明中应用的视频摄象机的内部结构;
图5为一方框图用来表示图4中视频摄象机的内部结构的媒体驱动部分的详细组成;
图6A,6B和6C分别是侧视图,平面图和后视图,以显示图4中的视频摄象机的外形;
图7图解显示一例光盘上的数据存储区域,该光盘能用于图4中所示的视频摄象机进行回放;
图8图解显示图4中所示视频摄象机的光学头的光电探测器的构成;
图9为一方框图显示图4中所示视频摄象机的光检测信号处理系统的构造;
图10是方框图显示图4中所示视频摄象机的跟踪伺服电路系统的构成;
图11是方框图显示图4中所示视频摄象机的ADIP处理电路系统的构成;
图12是方框图显示图4中所示视频摄象机的主轴伺服电路系统的构成;
图13为一流程图,显示图9中所示光检测信号处理系统的处理过程;以及
图14用方框图显示另一例图4中所示视频摄象机的光检测信号处理电路的全部结构的实例。
下面参照附图说明本发明的较佳实施例。在本例中,重现装置被用作为手提式视频摄象机的记录和重现装置的部分,摄像工具部分和可记录及重现静止图片或活动图片的记录和重现部分和音频信号互相成为整体。再者,记录和重现装置两部分在视频摄象机中相结合,这种结构可以记录和重现数据至/自迷你光盘,即磁光盘的一种(商标名:MINI DISC)。
整个实现过程以下列次序进行阐述:
1.光盘格式化
2.视频摄象机的外部构成
3.视频摄象机的内部构成
4.媒体驱动部分构成
5.视频摄象机所用光盘构成例解
6.光检测信号处理电路系统的构成
6.1光电检测器的构成
6.2光检测信号处理电路系统的总体构成
6.3跟踪伺服电路系统的构成
6.4ADIP处理电路系统
6.5主轴伺服电路系统
6.6处理的操作
7.修改
1.光盘格式化
本实施例中在视频摄象机内结合的记录和重现设备部分对数据进行记录和重现,例如,MD-DATA是对数据进行格式化,被用于记录和重现数据至/自迷你光盘,该光盘是磁光盘的一种。作为至/自迷你光盘记录和重现数据的格式,开发了一项被称为MD-DATA1的格式,作为记录媒体用于记录计算数据,开发了另一项称为MD-AUDIO的格式,用作为记录媒体记录音频信号的MD音频数据。MD-DATA1格式对磁光盘的光盘格式或寻址模式是常用的,这将在下文加以详述。另外,MD-DATA2格式允许记录较之MD-DATA1格式更高密度的容量。在本实施例中应用的视频摄象机能根据具有更高密度容量的MD-DATA2进行记录和重现,但也能根据MD-AUDIO格式和MD-DATA1格式进行记录和重现。首先,对光盘格式为MD-DATA2的媒体格式先进行说明。
图1,2A和2B图解显示一例格式为MD-DATA2的光盘的轨道结构。尤其,图2A和2B分别是截面图和平面图,以放大比例显示了图1虚线A所围绕的那部分。
如图2A和2B所示光盘的表面,有两种预先设置的纹道包括摆动纹道WG和不摆动纹道NWG,它不提供摆动。摆动纹道和不摆动纹道如此延伸以在光盘上形成双螺旋线,在它们之间有纹间表面Ld格式存在。
根据MD-DATA2格式,Ld纹间表面被用作为轨道。摆动纹道WG和不摆动纹道NWG按上述方式形成,而双螺旋线结构的两根轨道Tr·A和Tr·B则相对独立。
轨道Tr·A是一条把摆动纹道WG定位于光盘外圆周面,而把不摆动纹道NWG定位于光盘内圆周面的轨道。
相比之下,轨道Tr·B是一条把摆动纹道WG定位于光盘内圆周面,而把不摆动纹道NWG定位于光盘外圆周面的轨道。
换句话说,轨道A被认作是只能在光盘的外圆周面上形成摆动而轨道B被认作是只能在光盘的内圆周面上形成摆动。
在这个例子中,轨道间距由轨道A和轨道B相邻部分的中心距离而定,如图图2B所示,该距离为0.95微米。
摆动纹道WG的摆动根据信号而形成,该信号在光盘上的物理地址由频率调制(调频)和双位相调制编码。由此,在记录和重现过程中,光盘上的物理地址可通过解调摆动纹道WG提供的摆动所获得的重现信息而加以提取。
再者,由摆动纹道WG提供的地址信息对于轨道A和轨道B同样有效。换句话说,就有关摆动纹道的部分,即位于内圆周面的轨道A的一部分和位于外圆周面的轨道B的部分,通过摆动而拥有共同的地址信息,该摆动提供给摆动纹道WG的那部分。
需注意的是上述提到的寻址方法也被称为交叉寻址方法。何处该方法被采用了,那里的轨道间距同时就能被做得更小,例如,相邻两个摆动的串音被抑制了。形成在纹道上的摆动用以记录地址信息,该系统被称为ADIP(预纹道内地址)方法。在摆动形式中,调频的载波频率不同,MD-DATA2格式为88.4千赫,而MD-DATA1格式为22.05千赫。
另外,上述提到轨道A和轨道B通常拥有相同地址信息,如何识别它们将以下面的方式进行。
比如,一种可能的想法是应用三光束方法,主光束(beam)跟踪纹间表面Ld轨道时,余下的两条侧光束跟踪位于被跟踪过的轨道的对面的纹道区。
图2B举例详细阐明了一种状态,即主光束点SPm如何跟踪轨道A。在这个例子中,另两条边光束的一条SPs1跟踪位于内圆周面的不摆动纹道,而另一条SPs2跟踪位于外圆周面的摆动纹道。
虽然图中没有显示,但让我们再进行比较,如果主光束点SPm跟踪轨道B,那么边光束SPs1跟踪摆动纹道,而SPs2跟踪不摆动纹道。
在这一方法中,根据主光束点SPm是跟踪轨道A或是轨道B。被两条边光束SPs1和SPs2跟踪的纹道不可避免的在摆动纹道WG和不摆动纹道NWG两者之间交替。
探测信号由图像探测器根据边光束SPs1和SPs2的反射光获得,该探测依照被跟踪的是摆动纹道WG还是不摆动纹道NWG而显示不同的波形。同样的例子,在识别出边光束SPs1和SPs2的那一条在跟踪摆动纹道WG或是不摆动纹道NWG时,同样可以确认主光束跟踪的究竟是轨道A还是轨道B。
图3阐明了MD-DATA2格式较之MD-DATA1格式不同的轨道结构的主要特性。
首先,MD-DATA1格式中的轨道间距为1.6微米,每一位长为0.59微米。另外,激光波长λ为780nm,而且其光学头的数值孔径NA=0.45。
作为记录方法,纹道记录法被采用。简言之,纹道被当作轨道用来记录和重现。
对于寻址方法,采用摆动纹道方法,它利用构建在单螺旋线纹道背面的作为地址信息的摆动。
为记录数据用的调制方法,采用了EFM(8至14调制法)方法。另外,纠错法采用了ACIRC(Advanced Cross Interleave Reed-Solomon Code),而循环数据交错法被用于数据交错。结果,冗余数据为46.3%。
另外,在MD-DATA1格式中,CLV(持续线性速度)被用于光盘驱动,CLV中的线性速度为1.2m/s。
再有,记录和重现数据的标准速率为133kB/s,记录容量为140MB.
比较而言,在现行实施例中,视频摄象机所用的MD-DATA2格式,其轨道间距为0.95微米,每位长度为0.39微米。这样看来,它的轨道间距和位长都小于MD-DATA1格式。另外,为实现上述提到的位长,它的激光波长λ为650nm,而其光学头的数值孔径NA为0.52。这样,位于聚焦位置的光束点的直径缩小了,而光学系统的波段变宽了。
记录方式采用了参考上面提到过的图1和2的纹间表面记录方式,寻址采用了交叉寻址方式。另外,记录数据的调制采用了RLL(1,7)方法(RLL:有限游程长度),该法适用于高密度记录,纠错采用了RS-PC(Reed-Solomon ProductCode)方法,而数据交错采用块封闭方式。应用上述方法的结果显示,冗余数据可被压缩至19.7%。
同样在MD-DATA2格式中,CLV被用于光盘驱动,其线性速度为2.0m/s。记录和重现数据的标准速率为589kB/s。以至记录容量可达到650MB。同样,与MD-DATA1格式比较,MD-DATA2格式可以高之四倍的密度进行记录。
比如,用MD-DATA2格式对活动图片进行记录,用MPEG2(Moving Pictureimage coding Experts Group 2)实现对活动图片的数据压缩,15-17分钟长度的活动图片可被记录,虽然这还要取决于编码数据的位速率。再有,如采用ATRAC2(Adaptive Transform Acoustic Coding 2)压缩码,只记录音频数据,那么记录大约可长达10小时。
2.视频摄象机的外部构成
图6A,6B和6C分别是侧视图,平面图和后视图,从不同角度显示了在本实施例中所用视频摄象机的外观。
参照图6A,6B和6C,摄像透镜201包括了一个成像透镜和一个振动膜片,用在暴露状态下用视频摄象机200机体提供图像。再有,如图6B所示,200机体顶部,成像装置外部有一对立体声聚声用的话筒。换句话说,视频摄象机可以靠摄像透镜201对图像进行记录,也可以靠话筒202对立体声声音信号进行采集。
再有,显示部分6A,扬声器205和指示器206在200机体的侧面。显示部分6A用来回放成像图像,图像一张张由视频摄象机内部的记录和重现装置进行重现。值得注意的是显示部分6A所用的显示装置,比如,通常用一种液晶显示单元或类似物,但并不局限于此类元件。另外,显示部分6A能根据操作工具的反应以字母或字符提示使用者所需的信息。
凭借重现记录的声音信号,扬声器205输出重现的声音信号。另外,扬声器205输出所需的提示声音,如蜂鸣声或其它。
指示器206在视频摄象机记录操作过程中发光以提醒使用者处于摄制状态。
取景器204由机体200的背面提供,如图6C所示,其功能为显示在摄制或准备状态下通过透镜201传过来的特写图像或其它。使用者可通过取景器204观察取景。
另外,光盘槽203,图像输出终端T1,耳机和线路终端T2,和I/F终端T3都位于机体200的背面。光盘槽203是通过作为存取媒体的光盘的槽。可用于将现在实例中的视频摄象机装载/卸载在机体200中。图像输出终端T1是一个把重现图像信号,一个字符图像信号或其它信号输入外围图象装置的终端,耳机和线路终端T2的功能是把重现的声音信号输入至外围声音装置或耳机。I/F终端T3是数据通讯的接口输入/输出终端,如外部数据装置。
另外,机体200的不同位置上还有各种手动操作装置300,301和304至309。
主要的调节控制盘300是一个电源开/关控制钮,以控制视频摄象机的记录操作和重现操作。如图6C所示,当调节控制盘300处于OFF位置时,视频摄象机的电源供应被切断,而当调节控制盘300处于STBY时,电源被接通同时视频摄象机进入为摄制准备的等待状态。另一方面,如调节控制盘300处于PB位置时,电源被接通同时视频摄象机进入为重现准备的等待状态。
启动键301功能为一操作键,在视频摄象机处于摄制等待状态时,用来启动记录或摄制快门。
值得注意的是,在下面要描述的修改中,启动键301被按下,压力手柄在启动键301被按下时检测到按下的力量,而光盘的记录压缩图像数据的数据率根据压力手柄的反应而不同。
镜头缩放键304是对根据图像的远距和近距进行移动镜头操作的操作键。
弹出键305用来取出装在光盘槽203中的光盘。
重现和暂停键306,停止键307,快进键308和倒退键309是为从光盘中重现而准备的一系列功能键。
值得一提的是,如图6A,6B和6C所示的视频摄象机只是一个例子,可以根据适合于不同条件的发明而进行改进和变化。自然地,操作键的类型和操作方式及与外围设备相连的终端可有不同的形式。
3.视频摄象机的内部构成
图4是本实例中所用视频摄象机的内部构成的方框图。
参照图4透镜方框图1确切地显示了包括由一个成像透镜,一个光圈(diaphragm)和其他所需部分构成的光学系统11。上面在图6A,6B和6C中提到过的摄像透镜201中就包括了光学系统11。再有,透镜方框图1包括有一个电动机部分12,按次序其包括有一个聚焦电动机从而光学系统11进行自动聚焦和一个镜头拉伸电动机以调整变焦透镜,用来对变焦键304的操作作出相应的反应。
摄像方框图2主要包括了一个电路部分,用来把从透镜部分1成像而来的图像光转为数字图像信号。
通过光学系统11把图像物体的光图像提供至摄像方框2中的部件CCD(电荷耦合器件)21。CCD 21对光或像进行光电转换以产生成像信号及提供成像信号给采样保持和AGC(自动增益控制)电路22。采样保持和自动增益控制电路22对经由CCD21变为波形的图像信号进行增益调节和样品采样保持处理。采样保持和自动增益控制电路22的输出进入视频A/D转换器23,并经此转化为数字图像信号数据。
CCD21的信号处理定时,采样保持和自动增益控制电路22和视频A/D转换器23都由同步发生器24产生的同步信号所控制。定时发生器24接收一时钟信号,通过视频信号处理电路3内部的数据处理和系统控制电路31,用于处理信号,并根据时钟信号产生所需的定时信号,从而使摄像方框图2中的信号处理的定时与视频信号处理电路3中的定时实现同步。
摄像控制器25执行所需的控制命令以使上述提及的在摄像方框2中的电路能正常操作,同时让透镜方框1能进行自动聚焦,自动暴光调节,光圈调节和变焦等等。
例如,在自动聚焦调节中,摄像控制器25根据预先设置在内的聚焦控制方法传来的聚焦控制信息控制聚焦电动机旋转的角度。相应地,摄像透镜进入了聚焦状态。
记录时,视频信号处理电路3为由摄像方框2中提供的数字图像信号和由话筒202采集的数字化声音信号进行压缩处理,同时当使用者在向媒体驱动部分4记录数据时提供压缩数据。再有,视频信号处理电路3提供由摄像方框2提供的数字图像信号产生的图像,还提供取景器驱动部分207一张特征图像以使其能被取景器204进行显示。
另一方面,重现中,视频信号处理电路3为使用者从光盘51和媒体驱动部分4中读取的重现信息进行解调处理,那就是压缩图像信号数据和声音信号数据,被输出为解调图像和声音信号数据分别为重现图象信号和重现声音信号。
值得注意的是,在本实施例中,作为图像信号数据的压缩和解压缩方法,MPEG2被用作活动图片,而JPEG被用作静止图片。同时,作为声音信号数据的压缩和解压缩方法,ATRAC2被应用。
视频信号处理电路3的数据处理和系统控制电路31主要就视频信号处理电路3的图像信号数据和声音信号数据的压缩和解压缩进行控制,及对视频信号处理电路3输入/输出的数据进行控制。
再有,对整个视频信号处理电路3的控制处理包括数据处理和系统控制电路31由视频控制器38所执行。视频控制器38包括有一台微机等,例如,通过总线或其他与位于摄像方框2的摄像控制器25和位于媒体驱动部分4的驱动控制器46相联络,这些问题以下将被讨论。
由于视频信号处理电路3的基本操作为记录,由位于摄像方框2的图像A/D转换器23提供的图像信号被输入到数据处理和系统控制电路31。数据处理和系统控制电路31提供输入的图像信号数据,如,将其送入运动探测电路35。运动探测电路35为输入的图像信号数据进行图像处理如活动补偿并使用,例如,36为内存工作部分,并提供最终的图像信号数据到MPEG2视频信号处理电路33。
MPEG2视频信号处理电路33以34为内存作为工作部分根据MPEG2格式对输入的图像信号数据进行压缩处理,也将活动图片以输出压缩数据MPEG2的位流的形式输出。再有,当静止图片的图像数据被作为活动图片的图像信号进行提取和对图像数据进行压缩处理时,MPEG2视频信号处理电路33就以JPEG格式产生静止图片的压缩图像数据。值得注意的是,当压缩图像数据的格式为MPEG2而不是JPEG时,一种普通的I-图片(Intra-Picture)的图像数据可能被作为静止图片的图像数据被处理。
经由MPEG2视频信号处理电路33压缩编码而成的压缩图像信号数据以预定的传送速度写至缓冲区内存32,并由之暂时保存。
值得一提的是,在MPEG2格式中,从技术上讲,CBR(持续位率)和VBR(可变位率)被提供为编码位速率,而且视频信号处理电路3可配合他们进行工作。
举例说明,当根据VBR进行图像压缩处理时,运动探测电路35对微小单元的图像数据连续地进行从几十至几百桢镜头的动作探测,并进行传送,如一些动作被探测到,探测的结果作为运动向量信息被传送至MPEG2视频信号处理电路33。
MPEG2视频信号处理电路33利用所需信息包括运动向量信息成功地得到各个部件的量化系数,以使图像数据的速率在它们被压缩成码后可以成为特定的所需的数据速率。
依靠话筒202采集的声音信号,通过A/D转换器64,在显示,图象和声音信号输入和输出部分6中,被作为数字声音信号数据输入到声音信号压缩编码器和解码器37。
声音信号压缩编码器和解码器37根据上述的ATRAC格式为输入的声音信号数据进行压缩处理。压缩的声音信号数据也被数据处理和系统控制电路31以预定的传送速度写至缓冲区内存32,并由之暂时保存。
压缩的图像数据和压缩的声音信号数据能按上述的方式被寄存至缓冲区内存32。缓冲区内存32的主要功能为在吸收数据传送率的差异,该差异存在于摄像部件2或显示,图象和声音信号输入和输出部分6和缓冲区内存32之间,该数据传送率的差异还存在于缓冲区内存32和媒体驱动部分4之间。
压缩图像数据和压缩声音信号数据以上述记录方式存储在缓冲区内存32中,连续地于预定的时机读取和传送到媒体驱动部分4中的MD-DATA2编码器和解码器41。但是,在重现过程中,读取存储在缓冲区内存32中的数据和通过媒体驱动部分4对读取的数据进行记录操作。走盘部分(deck section)5可以被阶段性地执行。
这样就执行对数据控制进行写入和读取至/自缓冲区内存32,例如,通过数据处理和系统控制电路31来完成。
视频信号处理电路3的重现操作大体上按下列步骤进行。
重现中,压缩数据从光盘51中被读取并根据位于媒体驱动部分4中的MD-DATA2编码器和解码器41凭MD-DATA2格式进行解码,而用户重现的数据,即压缩声音信号数据被传送入数据处理和系统控制电路31。
数据处理和系统控制电路31一次性地存储输入的压缩图像数据和压缩声音信号数据,例如,在缓冲区内存32内进行保存。接着,数据处理和系统控制电路31从缓冲区内存32内读取保存在内的压缩图像数据和压缩声音信号数据,例如,在与重现时间轴相匹配的时候和以一所需的传送率,并传送压缩图像数据至MPEG2视频信号处理电路33和传送压缩声音信号数据至声音信号压缩编码器和解码器37。
MPEG2视频信号处理电路33对输入的压缩图像数据进行解压处理,并传送最终的图像数据至数据处理和系统控制电路31。数据处理和系统控制电路31提供解压的图像信号数据至位于显示、图象和声音信号输入和输出部分6的视频D/A转换器61。
同时,声音信号压缩编码器和解码器37对输入的压缩声音信号数据进行解压处理,并提供解压的声音信号数据至位于显示、图象和声音信号输入和输出部分6的视频D/A转换器65。
显示,图象和声音信号输入和输出部分6中,被输入视频D/A转换器61的图像信号数据由视频D/A转换器61转化为一个模拟图像信号,并被输入至显示控制器62和综合信号处理电路63。
显示控制器62根据被输入的图像信号驱动显示部分6A,以使重现图像在显示部分6A上得以显示。不只是靠光盘51重现的图像,而且那些由摄像部分包括透镜部件1和摄像部件2成像的图像都能从显示部分6A中按时间被回放出来。
另外,除了按上述方法重现的图像,还有那些根据上述提到过的操作工具的反应,提示用户的由字母,字符或其他组成的信息,都能由该方法被显示。例如,依靠对视频控制器38的控制,对合成图像信号数据,例如经由数据处理和系统控制电路31输出至视频D/A转换器61的带有图像信号数据的字母或字符进行处理,以使所需的字母,字符等在预定的位置得以显示。
综合信号处理电路63将由视频D/A转换器61提供的模拟图像信号转化为一个综合信号,并将此综合信号输出至视频输出终端T1。如视频摄象机通过视频输出终端T1被连接至一外显示器或其他类似单元,那么被视频摄象机重现的图像可被外显示器所回放。
同时,由位于显示,图象和声音信号输入和输出部分6的声音信号压缩编码器和解码器37输入视频D/A转换器65的声音信号数据通过D/A转换器65被转化为一个模拟声音信号,并被输出至耳机和线路终端T2。另外,由于D/A转换器65输出的模拟声音信号还通过放大器66输出至扬声器SP,重现的声音或类似物经由扬声器被输出。
媒体驱动部分4主要对记录数据进行编码,以使重现数据适应于MD-DATA2格式或MD-DATA1格式被记录到光盘上,并且将解码数据传送至走盘部分5。但是,重现中,媒体驱动部分4通过走盘部分5对从光盘1中读取的数据进行解码处理以获取重现数据,再将这些重现数据传送至视频信号处理电路3中。
媒体驱动部分4中的MD-DATA2编码器和解码器41接收记录数据,包括经由数据处理和系统控制电路31传来的压缩图像数据和压缩声音信号数据,并用MD-DATA2格式对其进行预定编码处理,并将编码数据暂时存储在缓冲存储器42中。然后,MD-DATA2编码器和解码器41从缓冲存储器42按定时要求读取编码数据,并将它们传送至走盘部分5。
重现中,MD-DATA2编码器和解码器41依照MD-DATA1格式或MD-DATA2格式为从光盘51中读取的并通过A/D转换器43和RF(射频)信号处理电路44输入的重现信号进行解码处理,并将作为重现数据的解码数字重现信号传送至视频信号处理电路3中的数据处理和系统控制电路31中。
值得注意的是,同样在这个例子中,如有需要,重现数据将被存储在缓冲存储器42中,并在所需的时机从中读取,再传送至数据处理和系统控制电路31中。这种对缓冲存储器42的读写控制是由上述描写的驱动器控制器42来完成的。
值得注意的是,即使在这样的情况下,例如,在回放光盘51时,伺服系统或类似系统也会因干扰而无序致使信号读取失败,如果在从缓冲存储器42中读取存储的数据的允许的时间内能重建对光盘51的重现操作,那么重现数据将以时间序列继续进行。
在本项实施例中,光探测信号以电流的形式被走盘部分5光学头53的图像探测器所持有,用以接收从光盘51反射过来的激光,并通过光学头53作为电流电压转换器的结果的模拟信号被输出。
在本项实施例的媒体驱动部分4中,电压形式的光探测信号通过A/D转换器43从模拟信号转化为数字信号。然后,光探测信号以数字信号的形式被提供至RF信号处理电路44中。
RF信号处理电路44为输入的光探测信号进行所需的数字信号处理,从而产生RF信号如重现数据,和为走盘部分5进行伺服控制的伺服控制信号如聚焦出错信号和跟踪误差信号。RF信号被输入至MD-DATA2编码器和解码器41中。
同时,由RF信号处理电路44产生的伺服控制信号被送至伺服电路45中。伺服电路45根据输入的伺服控制信号为走盘部分5执行所需的伺服控制。
在本实施例中,视频摄象机包括一个为MD-DATA1所用的编码器和解码器47,以使由视频信号处理电路3提供的记录数据可根据MD-DATA1格式编码并记录至光盘51,或者说,从光盘51中读取的数据是根据MD-DATA1格式进行编码的,这些数据被解码处理并将最终的数据输出至视频信号处理电路3中。简而言之,在本实施例中所用的视频摄象机可适用于MD-DATA1格式和MD-DATA2格式。
驱动器控制器46为一功能电路部分,用来控制媒体驱动部分4。
走盘部分5包括有驱动光盘51的机械装置。虽然在图4中未表示,但在图6C中可看到,走盘部分5可退出地接收光盘,并包括有一可供用户调换光盘用的机械装置,即光盘槽203。另外,光盘51在这里被预先设想为一可使用于MD-DATA2格式或MD-DATA1格式的磁光盘。
在走盘部分5中,装载的光盘51由一个以CLV速度自转的主轴电动机启动,使它也以CLV速度转动。在记录和重现中,激光由光学头53照射在光盘51上。
记录中,光学头53输出高强度的激光,用以加热记录轨道温度达到居里温度,但在重现中,则输出相对低强度的激光足以检测通过磁Kerr效应来自反射光的数据。至此,光学头53包括一个激光二极管用以输出激光,一个光学系统包括有偏振光束分离器,一个物镜和一个未在图4中特别指出的用来探测反射光的探测器。光学头53的物镜能保持在光盘的光辐射方向,以及向光盘方向或背离光盘方向上移动,例如,通过2轴机械装置。
磁头54位于横跨光盘51光学头53相反的位置上。磁头54根据光盘51记录的数据调节磁场。
另外,虽未显示,走盘部分5有一个滑轨电动机驱动的导轨机械装置。当导轨机械装置被驱动时,整个光学头53和磁头54都能以光盘的辐射方向移动。
操作部分7依照按键300-310(如图6C示)进行操作,操作键所控制的操作信息通过用户传送至视频控制器38。视频控制器38提供操作信息和由用户根据某操作控制引起的由从属部分执行的信息至摄像控制器25和驱动控制器46中。
外部接口8被用来提供视频摄象机和外围设备之间的数据联络,例如,I/F终端T3和图4中视频信号处理电路之间的联络。注意,这里并不一定要限定使用外部接口8,如IEEE1394接口或其他类似的都可被采用。
例如,在本实施例中,通过I/F终端T3将外围数字图像装置和视频摄象机相连接,由视频摄象机拍摄的图像或声音信号就能被记录至外围数字图像装置。另外,通过外部接口8接收的由外围数字图像装置重现的图象或声音信号或类似,可以用MD-DATA2格式或MD-DATA1格式记录至光盘51上。
电源供应部件9利用内装电池提供的直流电源或由交流电产生的直流电提供所需的电压至功能电路部分。电源供应部件9的电源开启和关闭操作由视频控制器38根据对上述提到过的主旋钮300的操作来完成。
另外,记录中,由视频控制器38控制指示器206以使指示灯发亮。
4.媒体驱动部分的构成
随后,从媒体驱动部分4提取出MD-DATA2格式的功能电路部分的详细结构如图4并参照图5方框图所示。值得注意的是,在图5中走盘部分5同媒体驱动部分4一起被显示,由于上面已描写过图4中的走盘部分5的构成,这里就不再赘述了。
在本实施例中,从光学头53的图象探测器输出以电流为形式的光探测信号通过光学头53内的电流-电压转换器被转化为另一以电压为形式的光探测信号,并在加强其抗噪性后被输出至媒体驱动器4。下面对包含有光学头53的图象探测器和电流-电压转换器的光探测信号输出电路进行说明。
输入至媒体驱动部分4的以模拟信号电压为形式的光探测信号通过A/D转换器43成为一数字信号。A/D转换器43的数字化输出被送至位于RF信号处理电路44内的RF放大器101和矩阵放大器107中。
RF放大器101对输入的光探测信号进行数字信号处理产生以数字信号为形式的RF信号(二进制数字化RF信号)。
二进制数字化RF信号被送至MD-DATA2编码器和解码器41,通过AGC和钳位电路103进行自动增益控制调节和钳位处理,处理过后的信号被输入至一个均衡器和PLL(锁相环)电路104。
均衡器和PLL(锁相环)电路104对输入的二进制数字化RF信号进行均衡处理,并将处理过后的信号输出至一个Viterbi解码器105。另外,经过均衡处理后的二进制数字化RF信号输入至PLL(锁相环)电路,通过此电路提取与二进制数字化RF信号同步的时钟信号CLK。
时钟信号CLK的频率相应于当前光盘的转速。因此,CLV处理器111从均衡器和PLL(锁相环)电路104中接收时钟信号CLK,将其与图3中带有出错信息的预定的CLV速度值进行比较以获得出错信号,利用此出错信号作为产生主轴出错信号SPE的一个信号部件。另外,时钟信号CLK被用作为信号处理电路系统的所需处理用的时钟信号,例如,该系统以RLL(1,7)解调电路106为起始。
Viterbi解码器105依据Viterbi解码方法,对通过均衡器和PLL(锁相环)电路104输入的二进制数字化RF信号进行解码处理。随后,以RLL(1,7)编码链为形式的重现数据被获取。
重现数据被输入至RLL(1,7)解调电路106,用该电路可获取实现RLL(1,7)解调的数据流。
用RLL(1,7)解调电路106解调处理所获得的数据流通过数据总线114写入缓冲存储器42中,缓冲存储器42中的数据被扩充。
在缓冲存储器42中扩充的数据流首先通过ECC(纠错码)处理电路116,依照RS-PC(Reed-Solomon乘积码)方法以纠错块为单元进行纠错处理,然后进行解密处理和EDC解码处理,即,由解密和EDC(出错检测码)解码电路117进行出错检测处理。
通过上述处理得到的数据叫做重现数据DATAp。例如,重现数据DATAp通过解密和EDC解码电路117以某一传送速率传送至视频信号处理电路3中的数据处理和系统控制电路31,该速率是根据传送时钟信号发生电路121产生的传送时钟得到。
当在媒体驱动部分4和视频信号处理电路3或是在媒体驱动部分4中两个不同的功能电路部分之间传送数据时,传送时钟信号发生电路121用石英来产生适当频率的传送时钟,即数据传送速率。
另外,传送时钟信号发生电路121产生所需频率的时钟信号,根据视频摄象机的操作情况被送至媒体驱动部分4和视频信号处理电路3中的功能电路部分。
矩阵放大器107根据输入的光探测信号的数字信号处理进行所需的计算处理,来提取跟踪误差信号TE,聚焦出错信号FE,和光盘51上的纹道信息GFM(纹道频率调制),它是记录成摆动纹道WG的绝对地址信息等,并将它们提供至伺服电路45。特别是,用这一方法提取的跟踪误差信号TE和聚焦出错信号FE被提供至伺服处理器112,而纹道信息GFM被提供至一个ADIP带通滤波器108。
值得注意的是,上面提到过本实施例兼用于MD-DATA2格式和MD-DATA1格式,在这种关系下,矩阵放大器107的所需信号处理由驱动控制器46来控制,以使对距阵放大器107的切换根据记录和重现物体所用的光盘的格式究竟是MD-DATA2格式还是MD-DATA1格式来决定。下面对这一过程进行说明。
凭借ADIP带通滤波器108,纹道信息GFM的波段受限于摆动频率,并被送至一个A或B轨道探测电路109和一个ADIP解码器110中。
A或B轨道探测电路109参考图2B中提到的方法,按照输入纹道信息GFM鉴别当前被跟踪的轨道是轨道A还是轨道B,并将跟踪辨别结果作为轨道辨别信息输出至驱动控制器46。同时,ADIP解码器110对输入的纹道信息GFM进行FM解调处理和所需的解码处理,以提取一个位于光盘上的绝对地址信息的ADIP信号,并将之输出至驱动控制器46。驱动控制器46根据跟踪辨别信息和ADIP信号执行所需的控制处理。
均衡器和PLL(锁相环)电路104的时钟信号CLK和ADIP解码器110获取的ADIP信号被输入至CLV处理器111。
根据由时钟信号CLK而来的一个集成的相位出错ADIP信号,CLV处理器111利用上述方法输入的信号为CLV产生一个主轴出错信号以实行伺服控制,并将其输出至伺服处理器112中。在这个例子中,根据CLV处理器111的构成,比较ADIP信号的频率和相应于预定的CLV速度的目标值,所获得的出错信号成分也被用作为主轴出错信号SPE的一个构成。需注意的是,CLV处理器111执行的操作由驱动控制器46来控制。
伺服处理器112根据按上述方法输入的跟踪误差信号TE,聚焦出错信号FE和主轴出错信号SPE产生一个跟踪控制信号,一个聚焦控制信号,一个直线控制信号,一个主轴控制信号和一些其它的伺服控制信号,并从驱动控制器46中产生一个跟踪跳跃指示,和一个通过指示等,并将这些产生的控制信号输出至伺服驱动器113中。
伺服驱动器113根据由伺服处理器112提供的伺服控制信号产生所需的伺服驱动信号。伺服驱动信号包括有为聚焦定向和跟踪定向用的2轴机械装置的两个2轴驱动信号,一个滑轨电动机驱动信号驱动导轨机械装置和一个主轴电动机驱动信号驱动主轴电动机52。
由于上面提到过伺服驱动信号被输入至走盘部分5中,光盘51的聚焦控制和跟踪控制以及主轴电动机52的CLV控制得以进行。
当光盘51的记录操作进行时,例如,记录数据DATAr经由视频信号处理电路3中的数据处理和系统控制电路31记录至一扰频和EDC编码电路115中。此记录数据DATAr的输入同步于传送时钟,它是由传送时钟发生电路121产生的数据传送速率的传送时钟。
扰频和EDC编码电路115将记录数据DATAr写入并扩充缓冲存储器42,并进行数据扰频处理和编码处理,该处理为记录数据DATAr根据预定的方法添加一个出错检测码。经过上述处理后,根据RS-PC系统,纠错码被添加到缓冲存储器42内扩大的数据DATAr中,例如,通过ECC处理电路116。
按上述方法处理过的记录数据DATAr被从缓冲存储器42中读取,并通过数据总线114提供至RLL(1,7)调制电路118中。
RLL(1,7)调制电路118为记录数据DATAr进行RLL(1,7)调制处理,然后以RLL(1,7)编码链的形式将记录数据输出至一个磁头驱动电路119中。
还有,MD-DATA2格式采用激光选通脉冲磁场调制方法为光盘的记录方法。激光选通脉冲磁场调制是一种在调制磁场内使用记录数据的记录方法,被应用于记录光盘表面,被光盘反射的激光以脉冲方式放射,而且同步于数据记录。
根据上述的激光选通脉冲磁场调制方法,记录在光盘上的坑边缘的成形处理并不依赖于如磁场的转变率之类的变换特性,而是由激光脉冲的反射时机所决定。
随后,把激光选通脉冲磁场调制方法和简单的磁场调制方法相比较,激光被稳定地照射在光盘上,用记录数据调制了的磁场被应用来记录光盘表面,这样可容易地减少记录凹坑的颤动。简而言之,激光选通脉冲磁场调制方法在高密度记录时,优于简单的磁场调制方法。
媒体驱动部分4的磁头驱动电路119将由记录数据调制的磁场从磁头54输入至光盘51。同时,RLL(1,7)调制电路118输出时钟信号和激光驱动器120的记录数据同步。激光驱动器120根据输入的时钟信号驱动光学头53的激光二极管,与由磁头54以磁场形式产生的记录数据相同步的激光脉冲可以被照射在光盘上。在这个例子中,由激光二极管发射的激光脉冲拥有为记录所需的激光能源。在本实施例中,激光选通脉冲磁场调制系统的记录操作可由媒体驱动部分4按上述方法进行。
值得注意的是,在图5中MD-DATA2部件的构成中,除了A或B轨道探测电路109之外,A/D转换器43,形成RF信号处理电路44的功能电路部分和组成伺服电路45的功能电路,在本实施例中,通常都使用如图4中所示的MD-DATA1格式的MD-DATA1部件。
5.使用本实施例的光盘结构的例子
接着,描述使用本实施例的光盘51的结构的一个例子。
图7阐述了使用本实施例的光盘51的区域结构例子的概念。注意,图7所示的光盘51的媒介格式已参照图1和图2描述过了。
从图7可以看到,光盘51的磁光记录区域,其上可进行磁光记录和重现,该区域有一个圆的最内侧的、尺寸是预定的管理部分,进入和来自该光盘51的磁光记录部分。在管理部分内,所需的被称为U-TOC(目录表格)的主要管理信息,即用户TOC,被记录下来。该用户TOC用于把数据记录到光盘上所要求的管理,以及从光盘重现数据所要求的管理。
例如,在本实施例中,将用于记录的管理信息、将记录到光盘和将从光盘重现的文档单元中作为数据的重现以及将以草图形式为各个文档显示的指出特徵的图象数据位置的数据都作为U-TOC存储下来。
注意,可根据把数据记录到光盘的结果或进行编辑处理(如删除一个文档)的结果,重新写入管理部分U-TOC的内容。
位于管理区域圆周外侧是数据区域。进入数据区域,主要是记录由用户收集的图象数据或声频信号数据、以及通过外部接口8得到的数据等等。
在此例中,数据以文档为单位进行管理,并以这种方式记录到数据区域内。此外,根据存储于管理区域内的U-TOC,以如上所述的方法对记录或重现每个文档的数据进行管理。
例如,一装上光盘记录在管理区域内的U-TOC就被读出。例如,该U-TOC被存储在媒体部分4或缓冲存储器32的缓冲存储器42的预定区域内,于是,一开始记录数据或进行编辑,与记录结果或编辑结果相对应,就重新写入存储于缓冲存储器内的U-TOC。然后,在一个预定的机会或时间,根据存储与缓冲存储器内的U-TOC的内容,重新写入或更新光盘51的U-TOC。
注意,图7所示的光盘结果的例子纯粹只是个例子而已,根据实际的使用条件等,光盘径向的方向上的区域的物理位置关系可能会是多种多样的。此外,如果需要,还会提供一个区域。一些其他种类的预定数据将存储到该区域内。
6.光检测信号处理电路系统的构成
6.1光电检测器的构成
下面描述本实施例中的光检测信号处理电路的构成。本实施例中的光检测信号处理电路包括一个光检测信号输出电路和一个光检测信号处理电路系统。该光检测信号输出电路把由走盘部分5的光学头53的光电检测器获得的接收光电流转换成电压信号。该光检测信号处理电路系统包含有媒介驱动部分4的一些所需的功能电路部分,如A/D转换器43、RF信号处理电路44和伺服电路45等,并为来自光检测信号输出电路的光检测信号进行所需的信号处理。
这样,参照图8,描述对来自光盘的激光的反射光进行检测的光学头53的光电检测器的构成。
本实施例中的光电检测器要求具有与MD-DATA1格式和MD-DATA2格式匹配的结构。为此,光电检测器包括以图8所示的方法安排的十个光电检测器元件A、B、C、D、E、F、G、H、I和J。
例如通过渥拉丝顿棱镜(Wollaston Prism),由驱动激光束获得的主光束辐射到光电检测器元件A、B、C、D,光电检测器元件I和光电检测器元件J上,而由以上所述的部分获得的子光束的两个分裂的光束辐射到光电检测器元件E和F以及光电检测器元件G和H上
注意,以光检测信号为根据,由以上所述的光电检测器元件A至J获得的信号处理,将在后面与光检测信号处理电路系统的构成一起加以描述。
6.2光检测信号处理电路系统的大体构成
图9表示组成本实施例的整个光检测信号处理电路系统的结构的主要构件。注意,此图中,那些与图4和图5中的电路块相对应的功能电路部分由类似的参照号代表。
光检测信号输出电路53A是一个但含在光学头53内的电路部分,并输出作为光检测信号的光电检测器元件A至J的检测输出。每个光检测信号形式是一个电压信号。
在图9中,为描述方便起见构成光电检测器元件A、B、C、D、E、F、G和H的光电二极管通常指示为光电二极管PD1;构成光电检测器I和J的光电二极管通常指示为光电二极管PD2。
通过光电二极管PD1接收来自光盘51的反射激光而获得的接收光电流被输入到电流电压转换器(后面仅称为I-V转换器)OP1。I-V转换器OP1根据由一个反馈寄存器R1确定的增益把输入的接收光电流转换成电压信号,并把电压信号输出到A/D转换器43。
同样,由光电二极管PD2获得的接收光电流输入到另一个I-V转换器OP2,并根据由反馈寄存器R2确定的增益通过此I-V转换器OP2转换成电压信号。此电压信号被输出到A/D转换器43。
注意,I-V转换器OP1和I-V转换器OP2实际上分别单独提供给光电检测器元件A、B、C、D、E、F、G和H以及光电检测器元件I和J。
将被照射到光盘51上的激光能量设定为,比如,具有与记录和重现的各种条件相一致。为了把光盘记录面的温度提高到居里温度,一记录到磁光盘上,就需要比进行重现时更高的激光能量。因此,记录与重现时,由光电二极管获得的接收光电流强度有所不同。
所以,必须调节在光电检测器元件A、B、C、D、E、F、G和H上获得的光检测信号,从而记录与重现时,该信号的强度应该相等。为了获得伺服控制信号和ADIP信号(即地址信号),要使用该光检测信号。
为此,例如,在本实施例中,I-V转换器OP1的反馈寄存器R1是一个可调的电阻器,并且要看是否应该进行记录或重现,才能把反馈寄存器R1的电阻值变为带有来自驱动器控制器46的控制信号S1的所需值,以切换I-V转换器OP1的增益。在此例中,改变电阻值,从而记录时的增益可低于重现时的增益。
注意,既然使用光电检测器元件I和J来产生一个重现RF信号,也就是说,既然只有当重现时才有效应用该操作,那么与光电检测器元件I和J相对应的I-V转换器OP2的增益无须在记录与重现时被特别切换。
然而,如果记录时的激光与重现时的激光能量在MD-DATA1格式和MD-DATA2格式之间有所不同,那么应该把光检测信号输出电路53A构制成能应变地控制反馈寄存器R1和反馈寄存器R2的电阻值,从而可以获得与激光能量相对应的I-V转换器OP1和I-V转换器OP2的增益。
从具有如上所述结构的光检测信号输出电路53A中输出的光电检测器元件A至J的光检测信号被输出到A/D转换器43。
在光检测信号输入到A/D转换器43之前的一个阶段,这些光检测信号中的每个信号都以模拟电压信号的形式存在。A/D转换器43把光检测信号转换成数字信号,并把该数字信号提供给RF放大器101、聚焦出错信号FE产生电路140、跟踪误差信号TE产生电路141以及根据ADIP方法提取纹道信息GFM的纹道信息产生电路142。
FE产生电路140、TE产生电路141和纹道信息产生电路142是构成图5所示的矩阵放大器107的功能电路部分。此外,矩阵放大器107和RF放大器101是包含在图4所示的RF信号处理电路内的功能电路部分。
FE产生电路140使用来自光电检测器元件A、B、C和D的光检测信号FE,并完成以下的计算处理
(A+B)-(B+D)
以产生聚焦出错信息FE,并把聚焦出错信号FE提供给伺服处理器112。
跟踪误差信号的检测方法在MD-DATA1格式与MD-DATA2格式之间有所不同,这将于后面加以详细描述。因此,要看产生跟踪误差信号的可适用的格式是MD-DATA1格式还是MD-DATA2格式,本实施例的跟踪误差信号TE产生电路141才能为光检测信号进行计算处理的切换。用驱动器控制器46中输出的控制信号S3来控制计算处理的切换。
从TE产生电路141中输出的跟踪误差信号TE提供给伺服处理器112。
此外,如以上参照图3的描述,MD-DATA1格式和MDDATA2格式采用不同的寻址方法。MD-DATA1格式使用单螺旋线形双侧振动方法,而MD-DATA2格式使用交错寻址方法。
因此,要看光盘5I具有MD-DATA1格式,还是MD-DATA2格式纹道信息产生电路142才能为单独的光检测信号进行计算处理的切换,从而可以适当地提取与每个格式相匹配的纹道信息GFM。
由纹道信息产生电路142获得的纹道信息GFM通过ADIP带通滤波器108提供给ADIP译码器110。通过该译码器,可获得一个ADIP信号,即地址信息。
这里,与摆动频率相对应,ADIP带通滤波器108用来自驱动控制器46的控制信号S5来切换其通带。该摆动频率与调制时的载波频率相对应,并在MD-DATA1格式与MD-DATA2格式之间有所不同。
注意,用纹道信息产生电路142来实现的计算处理的切换和ADIP带通滤波器108的通带切换的结构将于后面加以详细描述,而在此省略。
此外,RF放大器101为从重现时光电检测器元件I和J中获得的光检测信号执行计算处理,以获得一个重现RF信号。由于本实施例中的RF放大器101以数字信号处理的方式进行计算,由RF放大器101获得的重现RF信号被数字化,即成为二进制数字化信号,或换言之,成为二进制数子化重现RF信号。
RF放大器101的计算处理在MD-DATA1格式与MD-DATA2格式之间是很普通的。
尤其是,当数据只能在用于回放的光盘上以凹坑的形式被记录下来时,RF放大器101为光电检测器元件I和J提供的的光检测信号实现如下计算处理
I+J以获得一个重现RF信号。
进一步,当是一个磁光盘,能重写数据时,RF放大器101为光电检测器元件I和J提供的的光检测信号实现如下计算处理
I-J以获得一个重现RF信号。
此外,省略对内部结构的详细描述与说明,RF放大器101为重现信号RF进行均衡特性的切换,以使重现RF信号使用的频率性能在MD-DATA1格式与MD-DATA2格式之间有所不同。
这种计算处理的切换与光盘51的类型相对应,是只用于回放的凹坑光盘或者是磁光盘。而均衡特性的切换是根据如上所述的MD-DATA1格式或MD-DATA2格式,用从驱动器控制部分46中输出的控制信号S2来控制的。
从前面的描述可以看到,在本实施例中的光检测信号处理电路系统中,光检测信号输出电路53A后面的阶段中的信号处理电路系统进行数字信号处理。因此,图9中的交替的长、短虚线包围着的功能电路部分可一起构成单数字信号处理IC(集成电路)1300。
6.3跟踪伺服电路系统的构成
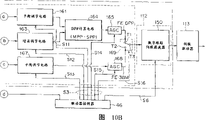
图10表示光检测信号处理电路系统中的跟踪伺服电路系统的构成的例子。作为跟踪伺服电路系统,图10表示跟踪误差信号TE产生电路141的主要内部结构。注意,与功能电路部分相对应的那些电路部分的重复描述被省略,以避免赘述。该功能电路部分已在上面参照图4、5和9描述过了。
顺便提一下,对于MD-DATA的跟踪误差信号的检测方法来说,3-光束方法用于MD-DATA1格式,DPP(差分推-拉)方法用于MD-DATA2格式。
MD-DATA1格式相对应的3-光束方法中,使用来自光电检测器元件E、F、G和H的光检测信号来执行以下的计算处理
(E+F)-(G+H)以获得一个跟踪误差信号。
对比而言,根据与MD-DATA2格式相对应的DPP方法,除了光电检测器元件E、F、G和H的光检测信号以外,使用光电检测器元件A、B、C和D的光检测信号来进行如下计算
(A+D)-(B+C)=MPP
(E-F)-(G-H)=SPP以获得一个主推-拉信号MPP和一个子推-拉信号SPP;然后,进行如下计算
MPP-SPP以获得一个跟踪误差信号。
TE产生电路141按以下所述的方法构制成能产生与任何一种3-光束方法和DPP方法相匹配的跟踪误差信号。
TE产生电路141,作为功能电路部分,接收每个从A/D转换器43中输出的以数字信号的形式存在的光检测信号,TE产生电路141包括MPP计算电路160,SPP计算电路162和TE计算电路166。
在功能电路部分中,MPP计算电路160和SPP计算电路162一边的电路系统与DPP方法相对应,而TE计算电路166一边的电路系统与3-光束方法相对应。
MPP计算电路160使用光电检测器元件A、B、C和D的光检测信号来执行用于获得一个主推-拉信号MPP的计算处理,即(A+D)-(B+C),并把一结果值输出到平衡调节电路161。该平衡调节电路161进行调节,从而计算的结果(A+D)和(B+C)可以展现出相应的平衡,并把结果值输出到DPP计算电路164。
SPP计算电路162使用光电检测器元件E、F、G和H的光检测信号来执行(E-F)-(G-H)的计算处理,以获得一个子推-拉信号SPP,并把这个子推-拉信号SPP输出到增益调节电路163。该增益调节电路163对子推-拉信号SPP的增益进行调节,并把所得到的子推-拉信号SPP提供给DPP计算电路164。
DPP计算电路164根据DPP方法对被输出的主推-拉信号MPP和子推-拉信号SPP进行MPP-SPP计算处理,以产生一个聚焦错误信号FE DPP,并把聚焦错误信号FE.DPP提供给AGC(自动增益控制)电路165.AGC电路165对聚焦错误信号FE.DPP进行增益调节,并把得到的信号输出到切换器169的终端T1。
分别用驱动器控制器46中输出的控制信号S11、S12和S14控制平衡调节电路161的平衡调整、增益调节电路163的增益调整和AGC电路165的增益调整,从而DPP方法所需的操作条件可以各自得到满足。
注意,后面即将描述的控制信号S11、S12、S13、S14、S15和S16通常为图9中的一个控制信号S3所代表。
TE计算电路166使用光电检测器元件E、F、G和H的光检测信号来进行(E+F)-(G+H)的计算处理,以获得与3-光束方法相对应的一个聚焦错误信号FE.3BM。由于平衡调节电路167进行的计算,聚焦错误信号FE-3BM受到(E+F)和(G+H)之间的平衡调节,并受到AGC电路168进行的增益调节,然后被提供给切换器169的终端T2。
这里,用驱动器控制器46输出的一个控制信号S13来控制AGC电路168的增益调整。
在切换器169中,终端T3或者与终端T1相连,或者与终端T2相连,并用从驱动器控制器46中输出的一个控制信号S16来控制切换。例如,终端T3与伺服处理器112中的数字跟踪伺服滤波器150的一个输入端相连。
在切换器169中,如果驱动器控制器46辨别出装载于走盘部分5中的光盘51具有MD-DATA2格式,那么终端T1和终端T3互相连接;但是如果辨别出光盘51具有MD-DATA1格式,那么终端T2和终端T3互相连接。
因此,当辨别出光盘51具有MD-DATA2格式时,根据DPP方法检测的一个跟踪误差信号TE-DPP被提供到数字跟踪伺服滤波器150;但是当辨别出光盘51具有MD-DATA1格式时,根据3-光束方法检测的一个跟踪误差信号TE-3BM被提供到数字跟踪伺服滤波器150。
在本实施例中,按以上所述的方法进行与光盘51的MD-DATA2格式和MD-DATA1格式之间的差别相对应的计算处理和信号处理。计算处理和信号处理作为一个跟踪误差信号的检测方法,对应于DPP方法或3-光束方法。
此外,根据DPP方法获得的跟踪误差信号TE-DPP和根据3-光束方法获得的跟踪误差TE-3BM在信号强度方面有所不同。
因此,例如,为了更正差别以执行适当的跟踪伺服控制,驱动器控制器46把一个控制信号S6输出到数字跟踪伺服滤波器150,来控制数字跟踪伺服滤波器150,从而要看输入的是跟踪误差信号TE-DPP,还是跟踪误差信号TE-3BM,才可以设定不同的伺服增益。
注意,控制信号S6也在其它的一些伺服控制中用于实现伺服增益的切换控制,这一点将于后面加以描述。
数字跟踪伺服滤波器150为根据DPP方法检测的跟踪误差信号TE-DPP或跟踪3-光束方法检测的跟踪误差信号TE-3BM进行所需的滤波处理,并被输入以产生作为伺服控制信号的一个跟踪控制信号,接着把跟踪控制信号输出到伺服驱动器113。
在本实施例中,由于以上所述的结构,根据一个跟踪误差信号的检测方法,即根据3-光束方法或DPP方法,可以执行跟踪控制。该跟踪误差信号在MD-DATA1格式与MD-DATA2格式之间有所不同。
6.4 ADIP处理电路系统
接着,描述光检测信号处理电路系统的ADIP处理电路系统。
图11中的方框示意图给出ADIP处理电路系统结构的一个例子。参照图11,作为ADIP处理电路系统,表示了纹道信息产生电路142的主要内部结构。注意,图11中对于类似于图4、5和9所示的功能电路部分的重复描述在此省略,以避免赘述。
如上所述,作为一种寻址方法,单螺旋线形双振动方法用于MD-DATA1格式,而交错寻址方法用于MD-DATA2格式。在此,对地址信息进行编码时,载波频率,即纹道频率,相互有所不同。
因此,要看光盘51具有MD-DATA1格式,还是具有MD-DATA2格式,才能由纹道信息产生电路142来为产生纹道信息进行计算处理的切换。
参照图11,从A/D转换器43输出的数字信号形式的一个光检测信号被提供给MPP计算电路170和ADIP计算电路171。
MPP计算电路170根据MD-DATA1格式,进行用户产生纹道信息的计算处理。MPP计算电路170执行(A+D)-(B+C)的计算处理,以产生主推-拉信号MPP;该主推-拉信号MPP作为与MD-DATA1格式相匹配的纹道信息GFM被输出到切换器172的终端T1。
注意,当以上参照图10所述的MPP计算电路170与MPP计算电路160相互比较时,因为除了MPP计算电路160是与MD-DATA2格式相对应的功能电路部分,以及MPP计算电路170是与MD-DATA1格式相对应的功能电路以外,MPP计算电路160和MPP计算电路170都执行类似的计算处理,所以,例如,如果前面阶段或后面阶段的平衡调节和增益调节等得到恰当的设置,则可以通用地构建MPP计算电路160和170,从而它们都构造成一个单功能电路部分。
ADIP计算电路171进行产生与MD-DATA2格式相匹配的纹道信息的计算处理。ADIP计算电路171执行(A+B+C+D)的计算处理,以产生与MD-DATA2格式相匹配的纹道信息GFM,并把纹道信息GFM输出到切换器172的终端T2。
在切换器172中,选择终端T1或终端T2与终端T3相连接,终端T3与ADIP带通滤波器108的一个输出端相连接。
用从驱动器控制器46中输出的一个控制信号S4来实行切换器172的终端切换。如果辨别出装载于走盘部分5内的光盘51具有MD-DATA1格式,则控制切换器172,从而使终端T1与终端T3相互连接。因此,由MPP计算电路170获得的纹道信息提供给ADIP带通滤波器108。
另一方面,如果辨别出光盘51具有MD-DATA2格式,则控制切换器172,从而使终端T2与终端T3相互连接。因此,由ADIP计算电路171获得的纹道信息提供给ADIP带通滤波器108。
双相调制一个ADIP信号,该信号是地址信息,和FM调制该双相调制过的ADIP信号,以获得光盘上的摆动的形式存在的纹道信息,而在本实施例中,对于MD-DATA1格式,FM调制的载波频率是22.05千赫,但是对于MD-DATA2格式,则是88.2千赫。
因此,对ADIP带通滤波器108进行切换,从而当光盘51具有MD-DATA1格式时,设置与载波频率22.05千赫相对应的一个所需通带,但是当光盘51具有MD-DATA2格式时,设置与载波频率88.2千赫相对应的一个通带。
驱动器控制器46也进行通带的切换控制,它辨别光盘51的格式并输出一个控制信号S5。数字处理可简洁快速地进行通带的这种变化。
通过应用以上所述的这种结构,根据一种寻址方法可以从光检测信号中对纹道信号进行检测,以获得地址信息。这种寻址方法在MD-DATA1格式和MD-DATA2格式之间有所不同。此外,在本实施例中,根据CLV方法,驱动光盘旋转,而实施例的优势还在于选择采用CAV(恒定角速度)系统。
此外,如果需要,要看辨别出光盘51具有MD-DATA1格式,还是具有MD-DATA2格式,才能用来自驱动器控制器48的一个控制信号S9来切换ADIP带通滤波器108后面的一个阶段中的173的增益。
6.5主轴伺服电路系统
接着,参照图12来描述驱动主轴电动机52的CLV的主轴伺服电路系统的结构。注意,对于类似于图4、5和9所示的功能电路部分的图12中的功能电路部分的重复描述在此省略,以避免赘述。
在参照图5的以上描述中,讲到了根据ADIP译码器110获得的ADIP信号,产生CLV处理器111的轴错误信号SPE,否则也可以采取一个系统,在其内,根据重现RF信号为MD-DATA1格式和MD-DATA2格式获得该轴错误信号SPE。
因此,图2所示的轴伺服电路系统构制成能有选择地使用一个以一个ADIP信号为根据的系统或另一个以一个重现RF信号为根据的系统,以产生轴错误信号SPE。
参照图12,提供一个相位与频率检测电路180,作为根据ADIP信号产生一个轴错误信号SPE的一个电路系统。由ADIP译码器110获得的ADIP信号被输入到该相位与频率检测电路180。
例如,相位与频率检测电路180使用一个表现为通过比较而得到的ADIP信号频率和一个目标值集合之间的一个频率差的错误信号以及另一个表现为ADIP信号和时钟CLK之间的一个相差的错误信息信号,以产生一个轴错误信号SPE,该ADIP信号频率和该目标值集合对应于一个与一个光盘格式相匹配的定义的CLV速度。由相位与频率检测电路180获得的轴错误信号SPE提供给切换器182的终端T1。
另一方面,作为根据一个重现RF信号产生一个轴错误信号SPE的一个电路系统,一个相位与频率检测电路181接收RF放大器101获得的一个重现RF信号,即提供一个二进制数字化的重现RF信号。
例如,相位与频率检测电路181也使用一个错误信息信号,它是通过比较得到的一个接收到的重现RF信号的频率与一个目标值集合之间频率差错,该接收到的重现RF信号的频率与该目标值集合对应于一个与一个光盘格式相匹配的定义的CLV速度。电路181还使用另一个错误信息信号,它是一个ADIP信号与时钟CLK之间的一个相位差错。用此两差错产生一个轴错误信号SPE。
由相位与频率检测电路181获得的轴错误信号SPE提供给切换器182的终端T2。
另外,切换器182也构制成能选择终端T1或终端T2与终端T3相连接,而终端T3与伺服处理器112中的数字轴伺服滤波器151的一个输入端相连接。
用从驱动器控制器46中输出的一个控制信号S7控制切换器182对终端连接的切换,从而相位与频率检测电路180和相位与频率检测电路181中的一个轴错误信号SPE信号提供给数字轴伺服滤波器151。
这里,如同由驱动器控制器46进行的终端切换控制的一个辨别因素,可存在各种辨别因素,例如,可以把辨别元件构制成能够与轴电动机的一个旋转条件(诸如启动旋转时的旋转或在PLL锁定条件下的旋转)相对应,用轴错误信号SPE中的一个信号获得又一个适当的轴伺服控制条件。此外,根据这个情况,可以固定地设置初始阶段中的切换器182的切换条件。
在图12所示的结构中,根据相位与频率检测电路180和181以及切换器182,构成CLV处理器111。
如以前的参照图2A和2B的描述,CLV速度在MD-DATA1格式与MD-DATA2格式之间有所不同,从而为MD-DATA1格式规定与1.2米/秒相对应,以大约11赫兹速度作内心圆周旋转,为MD-DATA2格式规定与2.0米/秒相对应,以大约22赫兹速度作内心圆周旋转。
因此,与由相位与频率检测电路180或181来的重现RF信号频率或与ADIP信号频率进行比较的目标值,必须根据光盘的格式,被切换成一个所需的值。这样,轴伺服电路系统应构制成能从如图12所示的驱动器控制器46中输出的一个控制信号S8A或S8B来进行目标值的切换控制。
此外,因为根据光盘的格式,CLV速度有所不同,轴电动机52本身的传递特性能为MD-DATA2格式提供一个与为MD-DATA1格式的传递特性不同的大约-6dB的差别。
因此,当光盘51具有MD-DATA2格式时,驱动器控制器46输出一个控制信号S6,以对伺服增益的切换进行控制,从而数字轴伺服滤波器151可以进行+6dB的更正。
通过如上所述的结构,能够实现与MD-DATA1格式和MD-DATA2格式中的任何一个相一致的轴伺服控制。
6.6处理操作(pause)
参照图9、10、11、和12,驱动器控制器46为以上所述的光检测信号处理电路系统进行的操作控制实际执行时的处理操作的例子如流程图13所示。注意,例如,关于重现的处理操作如图13所示。
在图13所示的处理过程中,首先在步骤S101中,可辨别出光盘51的光盘类型,即光盘51是具有MD-DATA1格式还是MD-DATA2格式。例如,可以根据一个识别模型的形状进行辨别处理,该识别模型实际地在光盘51的一个卡盘内形成,并指出MD-DATA1格式与MD-DATA2格式之间的区别。在此例中,在走盘部分5的光盘槽203中提供有能检测出识别模型的一个检测机制。
或者,例如,从一张光盘的管理信息区读出表示磁盘格式的管理信息,也可用作为识别信息。
如果在步骤S101辨别出光盘51具有MD-DATA2格式,那么控制进行到步骤S102;但是如果辨别出光盘51具有MD-DATA1格式,那么控制进入到步骤S112。
注意,在图13中,为了说明方便起见以缩写形式“MD1”代表MD-DATA1格式,以缩写形式“MD2”代表MD-DATA2格式。
在步骤S102中,为设置与DPP方法相对应的跟踪伺服电路系统的电路操作被执行。更特别的是,如以上参照图10的描述,驱动器控制器46输出一个控制信息S16,实现切换器169的切换控制,从而跟踪误差TE-DPP可以被输入到伺服处理器112。
在下一个步骤S103中,设置用于聚焦伺服控制、跟踪伺服控制和滑轨伺服控制的伺服增益,从而它们可以与MD-DATA2格式相一致。如以上参照图9、10、和12的描述,由驱动器控制器46进行这一设置,该驱动器控制器把一控制信号S6输出到与以上所述的每个伺服控制相对应的数字伺服滤波器。
随后,在步骤S104中,执行聚焦伺服。简而言之,在进行聚焦拉-入控制之后,关闭聚焦伺服回路,以启动聚焦伺服控制。
在步骤S105中,如上所述,由平衡调节电路161在后面阶段提供的的平衡调节信号被完成,送到MPP计算电路160。然后,在步骤S106中,由增益调节电路163在后面阶段提供的增益调节信号被完成,送到SPP计算电路162。此外,在步骤S107中,执行对于AGC电路165的增益调整的控制。
在步骤S108中,关闭跟踪伺服回路,以启动跟踪伺服控制。然后,在步骤S109中,启动滑轨伺服控制。
在下一步骤S110中,如以上参照图12的描述,由数字轴伺服滤波器151进行伺服增益的切换控制,从而可以更正达到+6dB。接着,在步骤S111中,如以上参照图11的描述,执行ADIP带通滤波器108的通带性能的切换控制,从而与MD-DATA2格式的88.2千赫相对应。之后,控制进到步骤S121。
另一方面,如果在步骤S101中辨别出光盘51具有MD-DATA1格式,那么首先在步骤S112中,为设置跟踪伺服电路系统的电路操作的控制处理被执行,从而可以与3-光束方法相匹配。更特别的是,如以上参照图10的描述,驱动器控制器46输出一个控制信号S16,以进行对切换器169的切换控制,从而可以把跟踪误差TE.3BM输入到伺服处理器112。
在下一步骤S113中,设置聚焦伺服控制、跟踪伺服控制和滑轨伺服控制的伺服增益,从而它们可与MD-DATA1格式相一致。如以上参照图9、10、和12的描述,这一设置由驱动器控制器46进行,该驱动器控制器46把一个控制器信号S6输出到每个数字伺服滤波器。
然后,在下一步骤S114中执行聚焦伺服;随后,控制进到步骤S115。
如以上参照图10的描述,在步骤S115中,进行TE计算电路的平衡调节电路167的平衡调节。在下一步骤S116中,执行对AGC电路168的增益调整的控制。
在下一步骤S117中,关闭跟踪伺服回路,以启动跟踪伺服控制。接着,在步骤S118中,启动滑轨伺服控制。
在步骤S119中,执行对于数字轴伺服滤波器151的伺服增益的切换的控制,从而其可与MD-DATA1格式相一致。在此例中,设置一个较低的所需增益,从而根据由如上所述的步骤S110中的处理过程设置的伺服增益,可以获得-6dB的一个电平。
在下一步骤S120中,执行对ADIP带通滤波器108的通带性能的切换控制,从而与MD-DATA1格式的22.05千赫相对应。随后,控制进行到步骤S121。
在步骤S121中,等候轴电动机的旋转速度达到一个规定的速度范围(在此范围中,可锁定旋转速度)后,接着,关闭轴伺服回路,以启动轴伺服控制。
然后,在步骤S122中,读出ADIP信号以获取地址信息。在下一步骤S123中,执行用于读出记录在光盘51上的数据的控制处理过程。
7.修改
在本实施例中的操作检测信号处理电路系统可具有一个修改过的结构,如图14所示,其中,光学头53一边不提供包含I-V转换器的光检测信号输出电路53A。
参照图14,修改过的光检测信号处理电路系统包括光电检测器部分53B。该光电检测器部分53B输出由光电检测器元件A至J获得的每个以电流的形式存在的光检测信号。光学头53内提供有光电检测器部分53B。
此外,所示的数字信号处理器IC 1300,包括A/D转换器43以及A/D转换器43后面阶段中的光检测信号处理电路系统1200。这里,如以上参照图9、10、11和12的描述,光检测信号处理电路系统1200与一个电路系统相对应,该电路系统包括数字信号处理器IC 1300中的功能电路部分。
在这个如上所述的例子中,在光电检测器部分53B和数字信号处理器IC 1300之间,提供有一个电流至电压的转换电路190。
电流至电压转换电路190把每个光电检测器元件A到J的以电流形式存在的光检测信号转换成电压信号,并把此电压信号提供给A/D转换器43。
电流至电压转换电路190可以是只包括一个具有电流至电压的转换功能的缓冲放大器的简单结构。
而在以上所述的实施例中,当光盘具有MD-DATA2格式时,则在光盘的一个纹间表面上进行记录,作为变通可在一个纹道上进行记录。此外,当光盘具有MD-DATA1格式时,则在一个纹道上进行记录,作为变通可在一个纹间表面上进行记录。
另外,在以上所述的实施例中,把本发明应用于一个磁光盘中,另外,也可把本发明应用于相位变化类型的一个CD-R或一个DVD-RW中。
注意,在以上所述的实施例中,当讲到MD-DATA格式用作媒介格式时,只要记录媒介是一个光记录媒介,以及要求对光记录媒介进行记录和重现两种光检测信号处理,就可自然地把本发明应用于任何其它的媒介格式中。
此外,在前面的描述中,描述了一个案例,其中,可获得一个用于取得MD-DATA1格式与MD-DATA2格式之间的兼容的结构。还是在这个方面,本发明可构制成能取得一些其它媒介格式之间的兼容。
此外,前面关于本发明实施例的描述是直接对视频摄象机而言的,还可根据一种光记录媒介,把本发明应用到以一个单一装置的形式存在的记录和重现装置。
对本发明的一个较佳实施例使用了专业术语进行描述,此种描述仅用于阐述说明之目的。不言而喻,可作出不脱离所附权利要求书的精神实质与内容范围的修改变化。
Claims (13)
1.一种重现装置,用于选择性地回放第一张光盘和第二张光盘,第一张光盘的每个纹道或纹间表面的两个侧面以第一频率构成摆动,信息记录在摆动的纹道或纹间表面上,第二张光盘上的每个纹道或纹间表面的两个侧面中的一个侧面以第二频率构成摆动,而每个纹道或纹间表面的另一个侧面是一个平面,信息记录在纹道或纹间表面上,其特征在于该重现装置包括:
一个光学头,用于把光辐射到一个预定的纹道或纹间表面以及与这个预定的纹道或纹间表面相邻的那些纹间表面或纹道上;
第一检测部分,用于对来自预定纹道或纹间表面的反射光进行检测;
第二检测部分,用于对来自与预定的纹道或纹间表面相邻的纹间表面或纹道的反射光进行检测;
第一计算部分,用于计算所述第一检测部分的反射光与所述第二检测部分的反射光之间的差别,以产生第一个跟踪错误信号;
第二计算部分,用于计算来自与预定的纹道或纹间表面相邻的一个纹间表面或纹道的反射光和另一个纹道或纹间表面的反射光之间的差别,它们是由所述第二检测部分对其进行检测的;
辨别部分,用于辨别装载于所述重现装置上的光盘是第一张光盘,还是第二张光盘;以及
跟踪控制部分,用于当所述辨别部分指出所装载的光盘是第一张光盘时,根据所述第一计算部分产生的第一跟踪错误信号,实行跟踪控制;而当所述辨别部分指出所装载的光盘是第二张光盘时,根据由所述第二计算部分产生的第二跟踪错误信号,实行跟踪控制。
2.如权利要求1所述的重现装置,其特征在于:所述第一检测部分包括一个由四个零件构成的检测器。
3.如权利要求1所述的重现装置,其特征在于:所述辨别部分根据在其内收有第一张光盘一卡盘内形成的识别孔和在其内收有第二张光盘的另一卡盘的另一卡盘内形成的识别孔,进行辨别工作。
4.如权利要求1所述的重现装置,其特征在于:还包括用于控制第一或第二跟踪错误信号的增益的控制部分。
5.如权利要求1所述的重现装置,其特征在于:还包括用于平衡第一或第二跟踪错误信号的平衡部分。
6.一种重现装置,用于选择性地回放第一张光盘和第二张光盘,第一张光盘上的每个纹道或纹间表面的两个侧面以第一频率摆动,地址信息事先记录在摆动的纹道或纹间表面上,第二张光盘上的每个纹道或纹间表面的两个侧面中的一个侧面以第二频率摆动,而每个纹道或纹间表面的另一个侧面是一个扁平面,地址信息事先记录在纹道或纹间表面上,其特征在于该重现装置包括:
一个光学头,用于把光辐射到一个预定的纹道或纹间表面以及与这个预定的纹道或纹间表面相邻的纹间表面或纹道上;
检测部分,在所述光学头的跟踪方向上,被分为至少两个区域,用于对来自预定纹道或纹间表面以及相邻的纹间表面或纹道的反射光进行检测;
第一计算部分,用于加上所述检测部分的所述的至少两个区域的检测输出;
第二计算部分,用于从所述检测部分的所述的至少两个区域的第二个检测输出中减去第一个检测输出;
辨别部分,用于辨别装载于所述重现装置上的光盘是第一张光盘,还是第二张光盘;
选择部分,用于交换地选择所述第一计算部分和所述第二计算部分中的一个;
控制部分,用于控制所述选择部分,以便当所述辨别部分指出所装载的光盘是第一张光盘时,选择所述第一计算部分;而当所述辨别部分指出所装载的光盘是第二张光盘时,选择所述第二计算部分;以及
地址提取部分,用于提取已由所述选择部分选择的、以所述第一或第二计算部分的输出为根据的地址信息。
7.如权利要求6所述的重现装置,其特征在于还包括:
提取部分,用于从由所述选择部分选择的所述第一或第二计算部分的计算结果中提取第一频率或第二频率,以及
切换部分,用于根据所述辨别部分的辨别结果,切换所述提取部分的一个提取频率。
8.如权利要求6所述的重现装置,其特征在于还包括:旋转控制部分,用于根据由所示提取部分提取的频率,对装载于所述重现装置上的光盘的旋转加以控制。
9.如权利要求8所述的重现装置,其特征在于还包括:控制第一张光盘和第二张光盘以互不相同的线性速度旋转;所述重现装置还包括用于更正线性速度之间差别的增益控制部分。
10.如权利要求6所述的重现装置,其特征在于:所述辨别部分根据在其内收有第一张光盘的卡盘内形成的识别孔和在其内收有第二张光盘的另一卡盘内形成的识别孔,进行辨别工作。
11.一种用于选择性地回放第一张光盘和第二张光盘的重现方法,第一张光盘上的每个纹道或纹间表面的两个侧面以第一频率摆动,信息记录在摆动的纹道或纹间表面上,第二张光盘上的每个纹道或纹间表面的两个侧面中的一个侧面以第二频率摆动,而每个纹道或纹间表面的另一个侧面是一个扁平面,信息记录在纹道或纹间表面上,其特征在于该重现方法包括如下步骤:
辨别回放的目标光盘是第一张光盘,还是第二张光盘;
当辨别步骤指出目标光盘是第一张光盘时,以侧光束为根据产生跟踪错误信号,并以所产生的跟踪错误信号为根据进行跟踪控制;
当辨别步骤指出目标光盘是第二张光盘时,以主光束和侧光束为根据,产生跟踪错误信号,并以所产生的跟踪错误信号为依据,进行跟踪错误控制。
12.如权利要求11所述的重现方法,其特征在于还包括以下步骤:
当辨别步骤指出目标光盘是第一张光盘时,从重现信号中提取第一频率,并根据所提取的频率控制光盘的旋转;但是
当辨别步骤指出目标光盘是第二张光盘时,从重现信号中提取第二频率,并根据所提取的频率控制光盘的旋转。
13.一种重现装置,用于选择性地回放第一张光盘和第二张光盘,第一张光盘上的每个纹道或纹间表面的两个侧面以第一频率摆动,信息记录在摆动的纹道或纹间表面上,第二张光盘的每个纹道或纹间表面的两个侧面中的一个侧面以第二频率摆动,而每个纹道或纹间的表面的另一个侧面是一个扁平面,信息记录在纹道或纹间表面上,其特征在于该重现装置包括:
第一信号处理部分,用于进行与第一张光盘相对应的信号处理;
第二信号处理部分,用于进行与第二张光盘相对应的信号处理;
选择部分,用于交换地选择所述第一信号处理部分和所述第二信号处理部分中的一个;
辨别部分,用于辨别装载于所述重现装置上的光盘是第一张光盘,还是第二张光盘;以及
切换控制部分,用于控制所述选择部分,以便当所述辨别部分指出所装载的光盘是第一张光盘时,选择所述第一信号处理部分;但是当所述辨别部分指出所装载的光盘是第二张光盘时,选择所述第二信号处理部分。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP041899/1998 | 1998-02-24 | ||
| JP041899/98 | 1998-02-24 | ||
| JP10041899A JPH11238245A (ja) | 1998-02-24 | 1998-02-24 | 光検出信号処理装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1232247A true CN1232247A (zh) | 1999-10-20 |
| CN1174385C CN1174385C (zh) | 2004-11-03 |
Family
ID=12621145
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB991025709A Expired - Fee Related CN1174385C (zh) | 1998-02-24 | 1999-02-24 | 重现装置和重现方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US6483787B1 (zh) |
| EP (1) | EP0938084A3 (zh) |
| JP (1) | JPH11238245A (zh) |
| KR (1) | KR19990072920A (zh) |
| CN (1) | CN1174385C (zh) |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000311367A (ja) * | 1999-04-23 | 2000-11-07 | Sony Corp | ディスクドライブ装置、及びトラッキング制御方法 |
| WO2001011544A1 (en) * | 1999-08-09 | 2001-02-15 | Cross Match Technologies, Inc. | System and method for sending a packet with position address and line scan data over an interface cable |
| IT247679Y1 (it) * | 1999-11-29 | 2002-09-09 | Atop Innovation Spa | Perfezionato disco ottico compatto, o cd. |
| JP4374698B2 (ja) * | 2000-02-25 | 2009-12-02 | ソニー株式会社 | 記録装置 |
| JP2001266508A (ja) * | 2000-03-24 | 2001-09-28 | Sony Corp | データ記録装置、データ再生装置並びに光ディスク |
| JP3997690B2 (ja) * | 2000-06-12 | 2007-10-24 | ソニー株式会社 | 光記録装置、光記録媒体残量表示方法、撮像装置及び撮像装置の光記録媒体表示方法 |
| JP2002074691A (ja) * | 2000-08-31 | 2002-03-15 | Pioneer Electronic Corp | トラックサーチ制御装置、トラックサーチ制御方法、情報記録装置及び情報再生装置並びに情報記録媒体 |
| JP4491943B2 (ja) | 2000-09-22 | 2010-06-30 | ソニー株式会社 | 光ディスクドライブおよび光ディスク判別方法 |
| JP2002190114A (ja) * | 2000-12-21 | 2002-07-05 | Pioneer Electronic Corp | 情報記録再生装置、情報記録再生方法及び情報記録媒体 |
| JP3578986B2 (ja) | 2000-12-22 | 2004-10-20 | 松下電器産業株式会社 | 光ディスク制御装置 |
| US7020054B2 (en) * | 2001-01-25 | 2006-03-28 | Dphi Acquisitions, Inc. | Digital servo system with biased feed-forward |
| US7522480B2 (en) | 2001-01-25 | 2009-04-21 | Dphi Acquisitions, Inc. | Digital tracking servo system with multi-track seek with an acceleration clamp |
| US7593300B2 (en) * | 2001-01-25 | 2009-09-22 | Dphi Acquisitions, Inc. | Digital tracking servo system with off-format detection |
| JP2002279640A (ja) * | 2001-03-21 | 2002-09-27 | Ricoh Co Ltd | ウォブル検出回路とその装置 |
| US7142486B2 (en) | 2001-04-02 | 2006-11-28 | Ricoh Company, Ltd. | Signal processing method and signal processing apparatus |
| JP4449260B2 (ja) * | 2001-06-19 | 2010-04-14 | ソニー株式会社 | 光ディスク記録再生装置のレーザダイオード駆動回路 |
| JP4784030B2 (ja) * | 2001-09-21 | 2011-09-28 | ソニー株式会社 | 記録装置、再生装置、記録方法、再生方法 |
| US6679376B2 (en) * | 2002-02-08 | 2004-01-20 | Yung-Tsun Chen | MD, CD and magnetic disk box structure |
| JP2003263760A (ja) * | 2002-03-08 | 2003-09-19 | Toshiba Corp | 回転補正回路、半導体集積回路、光ディスク装置及び回転補正方法 |
| WO2003088228A1 (fr) * | 2002-03-29 | 2003-10-23 | Sony Corporation | Dispositif d'identification de disque optique, procede d'identification de disque optique, enregistreur de disque optique, et dispositif de reproduction de disque optique |
| JP2004139708A (ja) * | 2002-10-21 | 2004-05-13 | Sanyo Electric Co Ltd | 光ディスク装置 |
| JP4050603B2 (ja) | 2002-11-29 | 2008-02-20 | 松下電器産業株式会社 | ウォブル信号処理装置 |
| JP3786367B2 (ja) * | 2003-06-25 | 2006-06-14 | 船井電機株式会社 | 光ピックアップ装置 |
| JP2005093010A (ja) * | 2003-09-19 | 2005-04-07 | Ricoh Co Ltd | 記録装置と記録方法とプログラム |
| CN1308940C (zh) | 2003-09-24 | 2007-04-04 | 松下电器产业株式会社 | 伺服误差信号生成电路以及伺服误差信号生成方法 |
| JP3985767B2 (ja) * | 2003-10-15 | 2007-10-03 | ソニー株式会社 | 光ディスク装置及び光ディスク再生方法 |
| JP2005122840A (ja) * | 2003-10-17 | 2005-05-12 | Sony Corp | 情報処理装置、情報管理システムおよび光ディスク |
| US7477584B2 (en) * | 2003-11-11 | 2009-01-13 | Samsung Electronics Co., Ltd. | Recording and/or reproducing apparatus and method with a signal quality determining device and method |
| JP2005182949A (ja) * | 2003-12-22 | 2005-07-07 | Toshiba Corp | 光ディスク装置 |
| US7295496B2 (en) * | 2004-07-15 | 2007-11-13 | Dell Products L.P. | Method of improving readability in optical drives |
| US20070021972A1 (en) * | 2005-07-07 | 2007-01-25 | Eric Vandewater | Bluebook compliant passive protection |
| JP2007334992A (ja) * | 2006-06-15 | 2007-12-27 | Hitachi Ltd | 光ディスク再生装置および光ディスク再生方法 |
| US8409181B2 (en) * | 2009-11-05 | 2013-04-02 | Amo Development, Llc. | Methods and systems for treating presbyopia |
| JP2012018712A (ja) * | 2010-07-06 | 2012-01-26 | Sony Corp | 光情報記録再生装置及び光情報記録再生方法 |
| TW201241827A (en) * | 2011-04-12 | 2012-10-16 | Quanta Storage Inc | Method for determining phsae difference of tracking error signal |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5235581A (en) * | 1990-08-09 | 1993-08-10 | Matsushita Electric Industrial Co., Ltd. | Optical recording/reproducing apparatus for optical disks with various disk substrate thicknesses |
| EP0525896B1 (en) | 1991-08-01 | 1997-01-02 | Koninklijke Philips Electronics N.V. | Compatible optical scanning device |
| JPH08263930A (ja) * | 1995-03-24 | 1996-10-11 | Pioneer Electron Corp | ディスク判別方法 |
| JPH08329492A (ja) | 1995-05-30 | 1996-12-13 | Nippon Conlux Co Ltd | 光学的記録媒体に対するトラッキング方法および装置 |
| JPH08329490A (ja) * | 1995-05-31 | 1996-12-13 | Pioneer Electron Corp | トラッキングエラー信号生成装置 |
| AU714000B2 (en) * | 1995-06-12 | 1999-12-16 | Sony Corporation | Optical pickup |
| US5835478A (en) * | 1995-06-15 | 1998-11-10 | Sony Corporation | Optical disc having address information for recording and reproducing data at correct positions |
| JP3669442B2 (ja) * | 1995-06-26 | 2005-07-06 | シャープ株式会社 | ディスク状記録媒体及びディスク記録再生装置 |
| JPH09198779A (ja) * | 1996-01-18 | 1997-07-31 | Pioneer Electron Corp | ディスク判別装置 |
| EP0786767B1 (en) * | 1996-01-26 | 2005-03-16 | Sharp Kabushiki Kaisha | Optical recording medium and optical recording/reproducing device, and manufacturing method of optical recording medium |
| JPH09237421A (ja) * | 1996-03-01 | 1997-09-09 | Sony Corp | 記録再生装置および方法 |
| JPH09259440A (ja) | 1996-03-25 | 1997-10-03 | Sony Corp | 記録媒体、アドレス記録方法および装置、並びに、記録再生方法および装置 |
| KR100246394B1 (ko) * | 1996-06-22 | 2000-03-15 | 구자홍 | 정보기록/재생장치 및 방법 |
| JP3774944B2 (ja) * | 1996-07-19 | 2006-05-17 | ソニー株式会社 | 記録再生装置および方法、並びに光ディスク再生装置および方法 |
| US6125087A (en) * | 1996-11-07 | 2000-09-26 | Hitachi, Ltd. | Optical pickup for optical disk apparatus |
| JPH10198985A (ja) * | 1997-01-10 | 1998-07-31 | Sony Corp | 光ディスク装置 |
| JP4143873B2 (ja) * | 1997-05-14 | 2008-09-03 | ソニー株式会社 | 光ディスクの製造方法、光ディスク及び光ディスク装置 |
-
1998
- 1998-02-24 JP JP10041899A patent/JPH11238245A/ja active Pending
-
1999
- 1999-02-11 US US09/249,239 patent/US6483787B1/en not_active Expired - Fee Related
- 1999-02-24 KR KR1019990006189A patent/KR19990072920A/ko not_active Application Discontinuation
- 1999-02-24 EP EP99103552A patent/EP0938084A3/en not_active Withdrawn
- 1999-02-24 CN CNB991025709A patent/CN1174385C/zh not_active Expired - Fee Related
-
2000
- 2000-12-20 US US09/742,483 patent/US6345024B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US6483787B1 (en) | 2002-11-19 |
| EP0938084A2 (en) | 1999-08-25 |
| CN1174385C (zh) | 2004-11-03 |
| EP0938084A3 (en) | 2000-02-02 |
| JPH11238245A (ja) | 1999-08-31 |
| US20010000694A1 (en) | 2001-05-03 |
| US6345024B2 (en) | 2002-02-05 |
| KR19990072920A (ko) | 1999-09-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1174385C (zh) | 重现装置和重现方法 | |
| CN1206630C (zh) | 将数据记录到光盘和/或从光盘重放数据的设备及其方法 | |
| CN1143304C (zh) | 记录装置、重放方法和重放装置 | |
| CN1118065C (zh) | 光盘的记录和复制设备及方法 | |
| CN1244105C (zh) | 光盘装置 | |
| CN1096078C (zh) | 信息记录装置及其方法、以及信息再生装置及其方法 | |
| CN1104714C (zh) | 记录方法以及再生装置及方法 | |
| CN1149555C (zh) | 制作数据记录介质的方法和对数据记录介质进行记录和复制的设备 | |
| CN1188842C (zh) | 重放光盘的装置和方法 | |
| CN1179353C (zh) | 盘驱动装置以及盘格式化方法 | |
| CN1258764C (zh) | 记录装置和记录方法 | |
| CN1124602C (zh) | 记录装置、记录/复制装置及记录方法 | |
| CN1327228A (zh) | 盘驱动设备及产生摆动信息的方法 | |
| CN1321316A (zh) | 记录和/或再现设备及编辑方法 | |
| CN1855259A (zh) | 光学拾取器和使用其的光盘驱动装置 | |
| CN1244092C (zh) | 光记录设备与激光功率控制方法 | |
| CN1305056C (zh) | 光输出调节设备和光输出调节方法 | |
| CN1217327C (zh) | 光盘记录和/或播放的装置和方法以及跟踪控制方法 | |
| CN1217610A (zh) | 锁相环电路、再现装置和相位锁定方法 | |
| CN1386277A (zh) | 数据记录方法、数据记录设备及记录介质 | |
| CN1465069A (zh) | 再生装置和编辑装置 | |
| CN1265375C (zh) | 再现设备、记录和再现系统、再现方法及记录和再现方法 | |
| CN1185651C (zh) | 复制系统和复制方法 | |
| CN1507628A (zh) | 编辑方法和装置 | |
| CN1109199A (zh) | 具有阻止向记录媒体的特定区域记录信号功能的录制装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C19 | Lapse of patent right due to non-payment of the annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |