CN1101013C - 发动机附加力矩和发动机减速率的确定方法/系统 - Google Patents
发动机附加力矩和发动机减速率的确定方法/系统 Download PDFInfo
- Publication number
- CN1101013C CN1101013C CN95106048A CN95106048A CN1101013C CN 1101013 C CN1101013 C CN 1101013C CN 95106048 A CN95106048 A CN 95106048A CN 95106048 A CN95106048 A CN 95106048A CN 1101013 C CN1101013 C CN 1101013C
- Authority
- CN
- China
- Prior art keywords
- engine
- mentioned
- value
- controlled variable
- acces
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims abstract description 67
- 230000009347 mechanical transmission Effects 0.000 claims abstract description 11
- 230000033001 locomotion Effects 0.000 claims abstract description 10
- 230000001360 synchronised effect Effects 0.000 claims description 38
- 230000005540 biological transmission Effects 0.000 claims description 34
- 239000000446 fuel Substances 0.000 claims description 20
- 230000007935 neutral effect Effects 0.000 claims description 18
- 238000011084 recovery Methods 0.000 claims description 14
- 239000000295 fuel oil Substances 0.000 claims description 13
- 239000002360 explosive Substances 0.000 claims description 11
- 230000014509 gene expression Effects 0.000 claims description 11
- 238000001914 filtration Methods 0.000 claims description 9
- 238000001514 detection method Methods 0.000 claims description 7
- 239000010705 motor oil Substances 0.000 claims description 7
- 230000009467 reduction Effects 0.000 claims description 5
- 230000001276 controlling effect Effects 0.000 claims 5
- 230000001105 regulatory effect Effects 0.000 claims 3
- 230000001143 conditioned effect Effects 0.000 claims 1
- 230000003044 adaptive effect Effects 0.000 abstract description 5
- 238000009795 derivation Methods 0.000 abstract description 2
- 230000001133 acceleration Effects 0.000 description 19
- 230000008859 change Effects 0.000 description 13
- 230000008878 coupling Effects 0.000 description 10
- 238000010168 coupling process Methods 0.000 description 10
- 238000005859 coupling reaction Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 8
- 230000006870 function Effects 0.000 description 8
- 230000008569 process Effects 0.000 description 5
- 150000001875 compounds Chemical class 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 239000003921 oil Substances 0.000 description 4
- 230000003068 static effect Effects 0.000 description 4
- 238000005286 illumination Methods 0.000 description 3
- 238000004378 air conditioning Methods 0.000 description 2
- 230000000712 assembly Effects 0.000 description 2
- 238000000429 assembly Methods 0.000 description 2
- 239000002131 composite material Substances 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 239000012530 fluid Substances 0.000 description 2
- 238000012797 qualification Methods 0.000 description 2
- 230000009897 systematic effect Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000009194 climbing Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000001351 cycling effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000008450 motivation Effects 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- GOLXNESZZPUPJE-UHFFFAOYSA-N spiromesifen Chemical compound CC1=CC(C)=CC(C)=C1C(C(O1)=O)=C(OC(=O)CC(C)(C)C)C11CCCC1 GOLXNESZZPUPJE-UHFFFAOYSA-N 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/04—Introducing corrections for particular operating conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/11—Stepped gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/11—Stepped gearings
- B60W10/111—Stepped gearings with separate change-speed gear trains arranged in series
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/30—Conjoint control of vehicle sub-units of different type or different function including control of auxiliary equipment, e.g. air-conditioning compressors or oil pumps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/19—Improvement of gear change, e.g. by synchronisation or smoothing gear shift
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/14—Inputs being a function of torque or torque demand
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/70—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for change-speed gearing in group arrangement, i.e. with separate change-speed gear trains arranged in series, e.g. range or overdrive-type gearing arrangements
- F16H61/702—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for change-speed gearing in group arrangement, i.e. with separate change-speed gear trains arranged in series, e.g. range or overdrive-type gearing arrangements using electric or electrohydraulic control means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0638—Engine speed
- B60W2510/0652—Speed change rate
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0666—Engine torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/02—Input parameters for engine control the parameters being related to the engine
- F02D2200/10—Parameters related to the engine output, e.g. engine torque or engine speed
- F02D2200/1006—Engine torque losses, e.g. friction or pumping losses or losses caused by external loads of accessories
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/14—Inputs being a function of torque or torque demand
- F16H2059/145—Inputs being a function of torque or torque demand being a function of power demand of auxiliary devices
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/50—Inputs being a function of the status of the machine, e.g. position of doors or safety belts
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
- F16H61/0202—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric
- F16H61/0248—Control units where shifting is directly initiated by the driver, e.g. semi-automatic transmissions
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S477/00—Interrelated power delivery controls, including engine control
- Y10S477/904—Control signal is acceleration
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
- Y10T74/19219—Interchangeably locked
- Y10T74/19251—Control mechanism
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- General Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Control Of Transmission Device (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
提供了一种用于至少是部分自动的车辆机械传动系统的自适应控制系统/方法,以便确定在车辆为运动时的表明附加力矩的控制参数(TACCFS)的值和在车辆不在运动时的表明发动机减速率的控制参数(dES/dt率)的值。确定了发动机减速率和附加力矩之间的关系(dES/dt率=A+B*TACCES),并且在另一个参数可以直接从检测到的输入(TEG、TBEF、ES)所确定的车辆运行条件下允许从一个参数推导出另一个参数。
Description
本发明涉及用于至少是部分自动的车辆机械传动系统的换档控制方法/系统,这类系统包括各种不同的换档控制技术:例如这样一类技术,其中成功地完成一次选定的换高速档的要求和/或可能性是按照车辆现有的运行情况而判定的,这些情况至少部分地是要以确定和/或预定在车辆的驱动轮上所能得到的驱动力矩和/或发动机的减速率为根据。具体地说,本发明涉及在换档时无需脱开车辆的主离合器这种类型的全自动或部分自动的车辆机械传动系统所用的一种自适应换档控制方法/系统,它能确定表明车辆的驱动轮力矩和/或发动机的减速率的一个值并使用这些值作为传动系统的控制参数。
更具体地说,本发明涉及一种用于自动车辆机械传动系统的自适应换档控制,它作为附加力矩的函数,不断地更新表明发动机飞轮的力矩的控制参数值,根据这个值以及某些驱动系的特性(如啮合齿速比、轮胎尺寸、效率等等),驱动轮的力矩可以准确地被确定和/或不断地更新表明发动机减速率的控制参数的值。对于自动或部分自动的车辆机械传动系统来说,希望知道飞轮上的力矩和/或发动机的减速率以便用于许多控制算法。知道了飞轮上的力矩和/或发动机减速率就可以作更精确的换档控制并使更为先进的算法(例如换档能力和总体组合重量(GCM)计算)成为可能。本发明的控制系统/方法利用从发动机(最好是电子发动机)来的力矩信息以及车辆和发动机的速度或加速度信息来计算这些控制参数。
利用电子控制单元(通常是以微处理器为基础的电子控制单元)的全自动或半自动车辆机械传动系统在现有技术中是已知的。这类自动机械传动系统的例子可以参考美国专利3,961,546、4,361,060、4,425,620、4,631,679和4,648,290号,它们的公开内容被作为参考而包括在此。
另外一种部分自动的车辆传动系统利用一种供机械传动系统使用的自动或半自动换档实施系统/方法以使用在只有手动控制的主离合器的车辆中。这种系统通常至少有一种工作方式,其中需要自动或半自动实施的换档是自动地预先选定的。提供了一种电子控制单元(ECU),以接收表明传动输入和输出轴的速度和/或发动机速度的信号并根据预先确定的逻辑规则处理这些信号,从而确定:(i)同步条件是否存在,(ii)在自动预选方式下,从当前的啮合速比是否需要作一次换高速档或换低速档,并向传动执行机构和/或发动机燃料控制器发出一个命令输出信号以便根据该命令输出信号使传动系统换档。
这种通用型的传动系统可从美国专利5,050,079、5,053,959、5,053,961、5,053,962、5,063,511、5,081,588、5,089,965和5,272,939号中看到,它们的公开内容被作为参考而包括在此。
虽然上述的自动和/或部分自动换档实施类型的车辆机械传动系统能适合于它们预期的应用,但它们并不能令人完全满意,因为它们有时会引起一次换档企图,而这种换档由于车辆的工作条件是不能允许和/或不能完成的。这在下列换高速档的情况下更需加注意,如车辆在重载情况下和/或在爬坡时和/或那些自动机械传动系统中没有提供自动离合器执行机构和/或输入轴制动因而输入轴的减速被限制在正常的或发动机制动辅助的减速率的情况下。
根据上述的共同未决的美国专利申请08/179,060和美国专利5,272,939和5,133,229、5,172,609和5,231,582号的发明(它们的公开内容被作为参考而包括在此),现有技术的上述缺点可以通过向至少是部分自动的机械传动系统的车辆提供换档控制方法/系统而被减到最小或被克服,这类系统在检测到要从当前的啮合齿速比转向某一目标齿速比的自动或手动换高速档的选择时,会根据当前检测到的车辆运行条件而确定这个选定的换高速档是否可行(即是否需要和/或是否可能完成),且仅仅起动那些可行的换档。
如果这个打算实行的换高速档是不可行的,则这个换档要求可以被修改(例如一个跳级换档被改成单级换档)或在预定的时间段(例如10秒钟)内被取消。
上面的现有技术的控制逻辑不是完全令人满意的,因为表明驱动轮的控制参数的值需要昂贵的轴力矩传感器来获取,和/或它们是从总的发动机力矩值导出的,其中没有考虑由于安装在车辆总成上的附件(例如空调机、交流发电机等)和使发动机加速所消耗的力矩。例如,一辆重型卡车在低变速档下加速时,从发动机在SAE J1939型数据链路上所报告的力矩数在油门大开时是一个相当大的数字。但是,发动机所“报告”的它正在产生的力矩的大部分是用在加速发动机的转动惯量上和/或驱动车辆的附属设备上,只有一部分所报告的力矩是从飞轮经过离合器而真正地去使车辆移动的。
上述的现有技术还有不能令人完全满意之处,因为在车辆停止时和非周期性地执行换加速档时难于确定所期望的发动机的减速率。
按照本发明,现有技术的缺点可以通过向至少是部分自动的车辆机械传动系统提供一种自适应控制而被减到最小或被克服,这种控制能准确地确定在车辆当前的运行条件下的表明发动机附加力矩的值、和作为附加力矩的函数的发动机飞轮力矩;并确定表明发动机的减速率的值。这种控制特别适用于通过使用与SAE J1922或J1939相类似的协议相符合的一种数据链路而与电子控制的内燃发动机通信的车辆自动机械传动系统。
在本发明的一种优选实施例中,上面所说的目标是在一种车辆自动机械传统系统控制(它属于一种在换档操作时不自动地脱开主离合器的类型)中通过使用下列关系式来完成的:
TEG=TFW+TBEF+TACCES+TACCEL
此处:
TEG=发动机总力矩;
TFW=飞轮力矩;
TBEF=基本发动机摩擦力矩(包括克服发动机内部摩擦的力矩和使发动机制造厂所安装的附属设备(如水泵、油泵等)转动的力矩);
TACCES=附加力矩(运转车辆附加设备如空调机、风扇、照明等所需的力矩);和
TACCEL=加速发动机的力矩,从发动机的加速度或减速度和发动机的转动惯量(I)计算而得到。
表示发动机总力矩(TEG)和基本的发动机摩擦力矩(TBEF)的各瞬时值可以从数据链路获得。TACCEL是从检测到的发动机加速度(它可能是负的)和发动机的校正过的转动惯量(I)而确定的。附加力矩(TACCES)是一个不断地被确定的值,申请人已确定,在车辆为惰转时传动装置在空档和/或主离合器脱开的情况下这个附加力矩可取为发动机的净力矩(即TEG-TBEF),而在车辆为静止或在开动时它和发动机的减速率以一种已知的基本上是线性的方式相关。
在车辆为静止下惰转时,附加力矩(TACCES)是作为总力矩减去基本摩擦力矩(TEG-TBEF)的函数而确定的,发动机的减速率(dES/dt率)则由发动机的减速率和附加力矩的已知关系导出的。在车辆行驶时,发动机的减速率是通过检测而得到的,最好是在换高速档的同步操作时检测,而附加力矩则从发动机的减速率和附加力矩的已知关系中推导而得。
因此,提供了一种用于车辆的至少为部分自动的机械传动系统的自适应控制系统/方法,它不断地更新表明附加力矩的控制参数(TACCES)的值和表明发动机的减速率的控制参数(dES/dt率)的值。这些控制参数用于控制自动机械传动系统的控制操作。
本发明的这个和别的目的和优点通过阅读其优选实施例的详细说明并结合所附的附图将变得很明确。
图1是通过本发明的系统以实现部分自动的车辆机械传动系统的示意图。
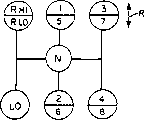
图1A是图1的传动装置的换档方式的示意图。
图2是用于本发明的机械传动系统的自动预选和半自动换档实施系统的示意图。
图3A是用于对表示当前车速和发动机速度的信号进行微分的逻辑的示意图。
图3B是当加到驱动轮上的发动机力矩为零时在换档瞬间计算预期的车辆加速度用的逻辑的示意图。
图4A和4B是用流程图形式表示的本发明的控制方法的示意图。
图5是说明可行的、和不可行的换档企图的一个换高速档事件的图形表示。
图6是在换高速档期间和图5相似的发动机速度和输入轴速度的图形表示。
图7是附加力矩(TACCES)和发动机减速率(dES/dt率)之间基本上为直线关系的图形表示。
某些术语将在下面的说明中使用,这仅仅是为了供参考而不是限制性的。“向上”、“向下”、“向右”、“向左”等词将指明用作为参考的图中的方向。“前面”、“后面”等词分别指明按常规方式安放在车辆中的传动装置的前端和后端,它们在图1中分别是传动系统的左面和右面。“向内”和“向外”两词分别表示朝向和离开设备的几何中心的方向并指明其中的各部分。上述的术语将包括上面专门提到的词、它们的派生词组和具有相类似含义的词。
术语“复合传动”用来说明改变速度或改变齿轮传动,它们具有接成串联方式的多种前进速度主传动部分和多种速度辅助传动部分,因而在主传动装置中选定的齿轮减速可以进一步通过在辅助传动部分中所选定的齿轮减速进行组合。“同步的离合器总成”及相似含义的词应该指的是一种离合器总成,用于借助于一个刚性离合器把选定的档次非转动地耦合到轴上,在此,在离合器的各部件处于基本上同步转速之前该离合器的啮合企图是被防止的。在离合器的构件中使用了具有较大负载能力的摩擦装置,在引起了离合器的啮合时,足以使离合器的各部件以及和它一起旋转的所有部件都以基本上是同步的速度旋转。
术语“换高速档”像这里所使用的那样,应该指的是从一个较低速度的齿速比向较高速度的齿速比的换档。术语“低速档”、“低档”和/或“第一档”用在这里时都应指的是在传动装置或传动部分中用于最低前进速度运行时的齿速比,即相对于传动系统的输入轴的最高减速比的那组齿轮档。
参考图1,图中显示了一种至少为部分自动类型的变级型的复合传动系统10,它是由一个具有自动预选的工作方式的半自动机械传动系统所实现的。复合传动系统10包括一个多速主传动部分12,它和变级型辅助部分14串联连接。传动系统10安装在外壳H中并包括一个输入轴16,该轴经过一个有选择地脱开及通常为啮合的摩擦主离合器C而由诸如柴油发动机E那样的原动机所驱动,这个摩擦主离合器C有一个输入或驱动部分18,它以驱动方式接到发动机的曲轴20上,还有一个被驱动部分22,它以可转动的方式固定在传动系统的输入轴16上。
发动机E是由燃油油门控制的,最好以电子方式控制,它和由SAE J1922或1939协议所规定的那种类型的电子数据链路DL相连接,主离合器C是由离合器踏板(未示出)或类似设备人工控制的。一般情况下,离合器C仅在从静止到起动和在车辆的微动操作的情况下才使用。
和机械传动系统10相似的传动系统在已有技术中是众所周知的,可参考美国专利3,105,395、3,283,613和4,754,665号来了解,它们的公开内容被包括在此以作参考。
所述类型的部分自动的车辆机械传动系统可参考上面所说的美国专利5,050,079、5,053,959、5,053,961、5,053,962、5,063,511、5,089,965和5,272,939号来了解。
虽然本发明的控制方法/系统特别适用于那些没有自动离合器执行机构或输入轴制动的自动机械传动系统,但本发明并不局限于这些应用。
在主传动部分12中,输入轴16带有一个输入齿轮24以便在基本上相同的转速下同时驱动多个基本上相同的中间轴组件26和26A。这两个基本上相同的中间轴组件是在主轴28的与其径向相对方向的两侧设置的,该主轴通常总是和输入轴16同轴对准。每个中间轴组件包括在机壳H内由轴承32和34所支持的中间轴30,在图中仅画出了它的一部分。每个中间轴都带有相同的中间轴齿轮组38、40、42、44、46和48,它们都被安装固定以便与之一起转动。多个主轴齿轮50、52、54、56和58围绕在主轴28周围,通过滑动的离合器环60、62和64可以每次一个地有选择地和主轴28联接而一起旋转,这在已有技术中是熟知的。离合器环60还可以用于把输入齿轮24联接到主轴28以便在输入轴16和主轴28之间提供直接的驱动关系。
一般说来,离合器环60、62和64是借助于和变速器外壳组件70联在一起的换档叉而在轴向定位的,这在已有技术中也是熟知的。离合器环60、62和64可以是熟知的非同步型双作用爪式离合器类型。
变速器外壳或执行机构70可以由诸如压缩空气这样的压缩流体来操纵,并且是可以由控制器自动控制的那种类型,这可以参考美国专利第4,445,393、4,555,959、4,361,060、4,722,237、4,873,881、4,928、544和2,931,237号而见到,它们的公开内容将作为参考而包括在此。
主轴齿轮58是倒档齿轮,它借助于通常的中间惰轮(未示出)而连续地与中间轴齿轮48啮合。还应该指出,虽然主传动部分12确定提供5种可选择的前进速度档,但最低前进速度档(即主轴驱动齿轮56以驱动方式连接到主轴28所提供的那一档),通常其齿轮减速比是如此之高,以致它必须被认为是一种低速或“爬行”档,它仅用于在恶劣条件下车辆起步的情况,而在高速传动范围下一般是不用的。因此,虽然主传动部分12确定提供5种前进速度,但通常它被称作是“4加1”主传动部分,因为只有4种前进速度是和这里所用到的辅助变级传动部分14进行复合传动的。
爪式离合器60、62和64是三位置离合器,因为它们可以定位于中间的不啮合位置,如图所示,也可以借助于执行机构70而处于全部右向啮合或全部左向啮合的位置。如所周知,离合器60、62和64中只有一个可以在某一时间处于啮合状态,并且还提供了主传动部分互锁装置(未示出)以便把别的离合器锁定在空档位置。
辅助传动变级部分14包括基本上相同的辅助中间轴组件74和74A,每一个都包括一个由机壳H中的轴承78和80所支持的辅助中间轴76,并带有二个辅助传动部分中间轴齿轮82和84并且一起旋转。辅助中间轴82和变级/输出齿轮86总是啮合在一起并支持该齿轮,而辅助传动部分中间轴齿轮84是经常和输出齿轮88啮合在一起的。
为了使复合传动装置10能把齿轮86联接到输出轴90以便运行于直接或高速级、或者把齿轮88联接到输出轴90进行低速级的运行,提供了一个双位置的同步爪式离合器组92,它借助于换档叉(未示出)和变级部分换档执行机构组件96而在轴向定位。用于复合变级类型的传动装置10的“换档方式”示意图如图1A所示。
变级部分执行机构96可以是美国专利3,648,546、4,440,037和4,614,126号中所说明的那种类型,其公开内容被包括在此作为参考。
虽然变级类型辅助部分14表示成为使用正齿轮或斜齿轮类型的双速部分,但应该理解,本发明也适用于使用三个或更多个可选择变速比的组合式分动器/变级类型的辅助部分的变级类型的传动装置,和/或使用行星齿轮的传动装置。另外,离合器60、62和64中的任何一个或多个可以是同步爪式离合器类型,而传动部分12和/或14可以是单个中间轴类型的。
为了提供操作的自动预选方式和传动装置10的自动或半自动换档实施操作,使用了一个输入轴速度(IS)传感器和一个输出轴速度(OS)传感器100。如果不用输出轴速度传感器100,也可用传感器102以检测辅助部分的中间轴齿轮82的旋转转速度。当然,齿轮82的旋转速度是主轴28旋转速度的已知函数,如果离合器92是按一个已知的位置啮合,则它也是输出轴90的旋转速度的函数。另外,当主离合器C完全啮合时,输入轴速度(IS)将等于发动机速度(ES)。
本发明的用于机械传动系统的自动预选和自动或半自动换档实施控制系统104示意性地表示在图2中。控制系统104除了上面所说明的机械传动系统10以外,还包括一个最好是以微处理器为主的电子控制单元106,用于从输入轴速度传感器98、从输出轴速度传感器100(或者也可以从主轴速度传感器102)、从司机的控制面板108、从油门踏板位置传感器152、以及通过数据链路DL从发动机E接收输入信号。一般说来,从数据链路至少可以得到表示发动机速度(ES)、发动机总力矩(TEG)和基本的发动机摩擦力矩(TBEF)的信息。电子控制单元(ECU)106也可以从辅助传动部分位置传感器110接收输入。
ECU106可以是在美国专利4,595,986号中所示意说明的那种类型,其公开内容被包括在此供参考。ECU可以有效地按照预定的逻辑规则处理各项输入以便向传动系统的执行机构如电磁总管112(它控制主传动部分的执行机构70和辅助传动部分的执行机构96)发出命令输出信号;ECU也向司机控制面板108、并通过数据链路DL向发动机E发出命令输出信号。
在优选实施例中,司机控制面板允许操作人员在指定方向(向上或向下)手动选择一次换档或者从当前啮合的速比换到空档,或者选择半自动预选操作方式(D),而且最好为了通知操作人员而提供一些显示以便显示当前的操作方式(自动或人工选择换档)、当前的传动运行情况(向前,向后或空档)、以及已经选定但尚未实施的任何速比变动或换档(换高速档、换低速档或换到空档)。
面板108可以是带有人工换高速档和换低速档选择器的“R-N-D-H-L”(即后退-空档-驱动-保持-低速)类型的。
为了实现选定的换档,总管112被预选以便使执行机构70被偏置到把主传动部分12换档到空档。这是由操作人员或ECU控制器通过暂时地减少和/或增加对发动机的供油而引起力矩的反向而完成的,参见美国专利4,850,236号,其公开内容被包括在此供参考。当传动装置换到空档且ECU已加以证实时(检测空档需要一段时间,例如1.5秒),如果选定的换档是一次复合换档,即这种换档既在主传动部分12也在变级传动部分14中进行,例如在图1A中所看到的从第4档速度换到第5档速度,则ECU将对总管112发出命令输出信号以便使辅助部分执行机构96在检测到前齿轮箱已处于空档后去完成变级换档。
当变级辅助部分已经以适当的速比啮合时,ECU将根据检测到的输出轴(车辆)速度和需要啮合的速比(GRTARGET)而计算或用其它方法确定并不断地更新一个输入轴速度的允许范围或一个速度带,这个范围将导致对要求啮合的速比是可以接受的同步啮合。当操作人员或ECU通过对油门的操纵而使输入轴速度处在这个可接受的范围之内时,ECU106将对总管112发出命令输出信号以致使执行机构70把主传动部分啮合在所需的速比上。
在车辆的某些运行条件下,自动或手动选择的换档可能是不能完成的,或者在完成了换高速档后将引起不可接受的车辆运动情况。这些条件通常涉及到当车辆是在重载下和/或在行驶中要克服巨大阻力的情况下换到高速档的情况下,这些情况例如是行驶在泥潭中、爬陡坡和/或顶着强的逆风行驶。
作为例子,为了达到基本上同步的条件以完成一次换高速档,输入轴10的速度(在主离合器啮合时该速度实际上等于发动机E的速度)必须减小以使它基本上等于输出轴90的速度(它正比于车辆速度)乘以目标的齿速比。由于没有提供自动离合器执行机构和输入轴制动,所以输入轴的速度将随发动机速度的衰减率而减小。这样,为了能在目标速比下进行啮合而基本上实现同步的条件,IS应该实际上等于OS*GRTARGET,同时在主离合器全部啮合时,IS应实际上等于ES。
这里所说明的自动机械传动系统的一次换高速档的顺序以图形方式示于图5中。线200表示在换高速档的那一点202之前的车辆条件下的输入轴速度(IS),其中当前的齿速比(GR)是全部啮合的,主离合器C是全部啮合的,且ES=IS=OS*GR。在换到空档时,随着发动机的油量减少(即对发动机的供油量减少到最小),输入轴速度和发动机速度将按照204线所表示的连续的(但不一定是线性的)速率(dIS/dt)衰减直到达到惰转速度为止。作为在换档的瞬间当加到车辆驱动轮的发动机力矩为零时输出轴90的期望速度(OSEXPECTED)与目标齿轮速比的乘积(该乘积就是所需要的输入轴/发动机的同步速度),在图中被表示为线208和210,它们分别表明是在对车辆运动的阻力为较小时或较大时的乘积。可以看出,在阻力较低的条件下(线208),同步将发生在点212上,这时所选择的换高速档是可行的,而在阻力较大的情况下(线210),实际上的同步不会发生,因而所选择的换高速档是不可行的。
在载重卡车的典型的柴油发动机中,发动机/输入轴的衰减率约为300~800RPM(转/分)且发动机和车辆的减速度都可以近似地为线性的。发动机和/或输入轴的特定的衰减率可以通过对在二次加油状态中对ES和/或IS信号的值进行微分而得到(例如,可参考上述的美国专利第4,361,060号)。不过,衰减率会随着温度和发动机驱动的附属设备的使用情况而有很大的变化。
参考图5可以看到,如果输入轴速度(IS)(如通过在点202上的初始输入轴速度和输入轴的加速度(dIS/dt)而确定的那样)能实际上等于加在车辆驱动轮上的力矩为零时所期望的输出轴速度(OSEXPECTED)(这个期望速度是由初始的OS(-IS/GR)和对车辆运动的当前的阻力下的车辆加速度(dOS/dt)所确定的)和目标齿速比(GRTARGET)的数值相乘的积,且其值大于某一参考值(如发动机惰转速度206),则完成同步换档到选定的目标齿速比是可行的,否则,完成同步换档到选定的目标齿速比是不可行的。当然,OS和dOS/dt信号分别相当于车辆速度和车辆加速度信号。所显示的参考值用的是发动机的惰转速度206,但如主离合器被手动地或自动地脱开,则它也可以是一较低的正值。
为了确定可行性的目的,对于具有很宽变化范围的总体组合重量(GCW)的车辆(在此,GCW即车辆、燃料、货物(如果有的话)、乘客(如果有的话)和操作人员的组合重量)来说,控制器会确定当前的GCW。根据这一信息,系统能够确定在驱动系统力矩为零时车辆的加速度(通常是减速度)即线208或210的斜率应该是多少,根据这个信息和现有的或计算而得的发动机的衰减率,即线204的斜率(它会随发动机速度、工作温度、发动机制动器的工作等而变),ECU就可以确定在当前的车辆运行条件下系统是否能够成功地完成所提出的换高速档。根据这个信息,控制系统就能够或者(i)发出命令信号以实施所提出的换高速档,或者(ii)修改提出的换高速档(通常把跳级换高速档改成简单的换高速档),或者(iii)在一段预定的时间内(举例而言可以是10秒钟左右)取消/禁止该换档请求。
简而言之,在加到驱动轮的力矩为零时车辆的加速度可大致用下式表示:
AOTORQUE=Ai-(Ti/CW)
此处Ai=在发动机加到驱动轮力矩为i时车辆的加速度,
C=常数,
Ti=加到驱动轮的发动机力矩i,和
W=车辆的总组合重量。
图3A示意性地说明用于对像OS和/或ES之类的各种输入信号222进行微分的逻辑单元或子程序220,以确定作为其输出信号224对时间的导数dOS/dt和/或dES/dt。
图3B示意性地说明一个逻辑单元或子程序226;其中,包括表示发动机力矩和车辆加速度(dOS/dt)的信号在内的各种输入信号228将根据上面所确立的逻辑规则进行处理以确定一个输出信号230,这个信号表示在换档瞬间当没有发动机力矩加到车辆驱动轮上时所期望的车辆加速度(dOS/dt)。
上面是对一个控制系统的说明,这个系统自动地估算在当前车辆运行条件下手动或自动地实现预选的换档的可行性,并使这种提出的换档得以实现、修改或被取消。如果在手动选定的换高速档被确定为不可行的情况下,可以给操作人员发出一个能触觉到的、听到的或能看到的报警信号。
如上面所说明的,在全自动或部分自动机械传动系统中,对许多控制算法来说,希望能知道在飞轮上的力矩(TFW)和/或发动机的减速率(dES/dt率)。知道了飞轮上的真实力矩和/或发动机的减速率(dES/dt率)可以得到更精确的换档控制并使一些先进的算法,如换档可能性和GCW计算成为可能。飞轮力矩是附加力矩的函数。本发明的控制利用了从发动机(最好是电子发动机)来的力矩信息以及车辆和发动机的加速信息以计算这些控制参数。
为了控制全自动或半自动的车辆机械传动系统,重要之点在于能够确定表示驱动轮力矩的一个精确值。如果驱动系统的各个参数(如当前的传动齿速比、驱动轴比、驱动系统效率和轮胎尺寸)为已知,则驱动轮的力矩可以作为发动机的飞轮力矩(即加到车辆主离合器或力矩转换器上的输入力矩)的函数而被确定。
对于带有电子控制的发动机并在由SAE J1922和J1939协议所规定的类型的数据链路上进行通信的重型车辆来说,发动机力矩可用下式表示:
TEG=TFW+TBEF+TACCES+TACCEL
此处:TEG=发动机总力矩;
TFW=飞轮力矩;
TBEF=基本的发动机摩擦力矩;
TACCES=附加力矩;和
TACCEL=用于加速发动机的力矩。
发动机总力矩(TEG)和基本的发动机摩擦力矩(TBEF)(即驱动发动机制造厂所提供的设备(如油泵)和克服发动机内部摩擦力所需的力矩)是可从电子数据总线(DL)上得到的参数。加速发动机所需的力矩(TACCEL)是作为检测到的发动机加速度和已知的发动机的转动惯量的函数(TACCEL=dES/dt*IENGINE)而确定的。
因此,为了确定飞轮力矩(TFW)(这是在换档可能性逻辑、GCW确定逻辑等之中的一个控制参数),就有必要提供用于确定附加力矩(TACCES)的控制技术。附加力矩(TACCES)的值可能有显著的和经常的变化,因为车辆的附属设备如照明、空调、风扇驱动之类会自动地或由车辆的操作人员或乘客手动地接通或关掉。
假定在无外力的发动机减速(没有发动机制动操作)的情况下,就可以观察到发动机的附加力矩(TACCES)和发动机的减速率(dES/dt率)的变化是相互依赖的。发动机的减速率(dES/dt率)是当传动系统处在空档和/或主离合器是全部脱开、且燃油供给是处在最低值的发动机的减速率。随着附加负载的增加,发动机的减速率与其按正比而增加。
为了控制自动化的机械传动系统,也有可能需要确定当车辆不在运动情况下和/或没有进行换档时的发动机的减速率(dES/dt)。
当车辆在运动和在换档时,发动机的减速是按如下说明而确定的。对于具有由ECU通过在SAE J1922或J1939协议中所规定的类型的电子数据链路进行控制的发动机的类型的自动传动系统来说,发动机在从现有的速比脱开之前先工作在一个“预降”(Predip)方式,在从现有速比换到空档之后则工作在“同步”方式,而在紧接着啮合到目标齿速比之后就工作在“油门恢复”方式。在这些方式下的发动机和输入轴速度示于图6中。在“预降”方式中,调节燃油供应使驱动系力矩反向以解除力矩锁定的条件。在“同步”方式下,发动机供油减到最小,使得发动机和输入轴速度下降到同步速度以便啮合到目标齿速比(ES=IS=OS*GRTARGET)。在“油门恢复”方式时,发动机的燃油供应平滑地恢复到由操作人员对油门踏板定位所表示的值。
为了在发动机工作在同步方式的情况下准确地确定当前的发动机减速率值,以及为了尽量减小噪声、扭力等,重要的是,对于每次测量,要利用发动机的初始速度和最终速度之间的最大可能的差,并且利用一种滤波技术。因此,要确定表示发动机当前的减速度的值,就必须在换高速档的同步发动机控制阶段取得读数,并应包括在同步发动机控制阶段开始起动时在图6中的点A附近的第一个读数:以及在同步发动机控制的结束或将要结束时在图6中B点或其附近的第二个读数。这样,发动机减速率的当前值(dESCURRENT)就是(RPMA-RPMB)÷(TimeA-TimeB)。这个值再经过滤波以给出一个更新了的控制参数,例如:
dESUPDATED=[(dESCURRENT)+((7)*(dESPREVIOUS))]÷8
A点的出现被看成是工作在同步方式下被检测到的最初的时间。B点的出现则被看成是工作在油门恢复方式下被检测到的最初的时间。由于在进入换高速档的发动机控制子程序之间的循环时间内发动机速度不会有可测得到的变化(约40毫秒内),所以这是获得在每次换高速档的同步工作期间发动机速度变化的最大值的一个极其精确的方法。
在重型车辆上的经验表明,4∶1到20∶1之间的滤波技术(最好是约为7∶1的滤波技术)将提供合适的响应程度而同时能滤掉由于振动、扭力等因素所引起的驱动系统的噪声。
本发明提供了一种用于控制至少是部分自动的车辆机械传动系统的控制方法/系统,在这种传动系统中附加力矩和发动机减速率在无论车辆是在运动或停止时都可以被确定。
当车辆为停止且发动机为惰转和传动系统处于空档或主离合器脱开时,附加力矩(TACCES)基本上等于发动机总力矩减去基本的发动机摩擦力矩(TEG-TBEF)。(TEG-TBEF)也称作“发动机净力矩”。这个值最好从数据总线或数据链路(DL)检测到并最好经过滤波平均处理计算。
向系统控制器提供有关的信息,该信息使发动机的减速率(dES/dt率)和附加力矩(TACCES)按一个预定的基本上是线性的方式相联系,这里的发动机减速率等于A+(B*附加力矩),此处“A”和“B”是预先确定的存储着的参数。如果dES/dt率的单位是RPM/秒,TACCES的单位是磅-英尺,则“A”的单位是RPM/秒,“B”的单位是RPM/秒/磅-英尺。图7是这种关系的图解表示。
利用前面的关系和附加力矩的值,预期的发动机减速率的值可以在车辆为静止的状态下确定。这样所确定或导出的减速率对系统逻辑用于车辆起动时仅是一个近似值,一旦车辆开始起动并换高速档时就可以用经过滤波的、实际检测到的发动机减速率值来校正和更新。
当车辆正在行驶并执行换高速档时,发动机的减速率(dES/dt)可以通过观察当传动系统处于空档且发动机的供油减到最低值时的实际的发动机减速率而确定,并且最好要对观察值作一次滤波平均值的计算。例如,可参考上述的共同未决的美国专利申请序列号08/__,其题目为“发动机减速的确定方法/系统”(EngineDeceleration Determination Method/Sytem)。这样,附加力矩(TACCES)就可以从上面所讨论的同一个预先确定的线性关系(即TACCES=(发动机减速率-A)÷B)来确定。利用图7的例子,发动机减速率等于-385+(-2*TACCES),在观察到的经过平均的发动机减速率(dES/dt率)为-500RPM/秒时,附加力矩(TACCES)应该等于81.25磅英尺。
虽然线性关系对于给定的车辆结构是被规定为预先确定的,但此关系也可以由控制器逻辑自适应地得知,或者在车辆装配线的末端(end-of-line)由经验而确定。例如,为了在车辆装配线的末端的检查和测试过程中确定这个基本上是线性的关系,可遵循下列步骤:
(1)对车辆发动机加热使其达到正常的工作温度;
(2)关掉所有附属设备(照明、空调等等),使车辆停在空档上,然后踏下加速踏板使发动机加速到限定的速度,然后放开踏板,监视并记录通过最大运行速度(即约1,800RPM)的发动机减速率;
(3)让发动机惰转并通过监视发动机的数据链路而观察附加力矩,这是图7中线上的一点。
(4)在车辆停止并空档时开动所有的附属设备,然后通过踏下加速踏板使发动机加速到限定的速度,然后松开踏板并监视和记录发动机的减速率;
(5)使发动机惰转并通过监视数据链路以观察附加力矩,这是图7中线上的第二点;和
(6)利用这样而确定的两个点确定此直线方程并把相应的校正值送入传动系统控制器。
应该指出,上述过程可以人工执行,或者也可以作为在装配线末端校正的计算机逻辑的一个例行程序。另一种方法是,一个相似的过程可以结合到传动控制器的逻辑中。
利用上述技术,一个精确的TFW值(TFW=TEG-TBEF-TACCES-TACCEL)和一个发动机减速率值(dES/dt率)可以被确定。本发明的附加力矩(TACCES)、飞轮力矩(TFW)和发动机减速率(dES/dt率)的确定方法/系统以流程图的形式示意性地在图4A和4B中加以说明。
因此,可以看出,提供了一个用于自动机械传动系统10的较为简单和廉价的实施换档控制系统/方法,它利用现有的输入信号和无外力作用的发动机减速率(dES/dt率)和附加力矩(TACCES)之间的已确定的关系,来提供准确的、表明附加力矩(TACCES)、飞轮力矩(TFW)和发动机减速率(dES/dt率)等控制参数的值。
虽然本发明是用带有一定程度的特殊性而说明的,但应该理解可以做出在形式上和细节上的各种变动而不离开在本申请中提出权利要求的发明的精神和范围。
Claims (40)
1.一种用于车辆的自动机械传动系统中的方法,该传动系统包括一台燃油油门控制的内燃发动机(E)、一个操作员设定的燃油油门设备(P)、一个具有输入轴(16)和适用于驱动车辆驱动轮的输出轴(90)的多速换档机械传动装置(10),上述输入轴以驱动方式通过一个摩擦主离合器(C)而连接到上述的发动机,该系统还包括一个控制单元(106),该控制单元(106)用于接收各输入信号,其中包括表明输入轴或发动机旋转速度的输入信号(ES,IS)、表明发动机总力矩的输入信号(TEG)、和表明基本的发动机摩擦力矩的输入信号(TBEF)、该控制单元(106)还用于按照预确定的逻辑规则来处理上述信号以确定控制参数并向传动系统的各执行机构发出命令输出信号,这些执行机构包括用于控制发动机供油的装置和用于控制传动系统换档的装置(70),该方法用于在发动机为惰转且传动装置是在空档和/或主离合器是脱开的车辆状态下,确定表示发动机减速率的控制参数(dES/dt率)的值,上述的方法的特征在于:
确定发动机减速率(dES/dt率)和附加力矩(TACCES)之间的关系((dES/dt率)=A+(B*TACCES));
确定表示附加力矩的控制参数(TACCES)的值;和
确定表明发动机的减速率的上述控制参数的值,它是作为表明附加力矩的上述参数的值和上述关系的函数而进行确定的。
2.如权利要求1的方法,其特征在于,其中所说的输入信号包括表明发动机总力矩的输入信号(TEG)和表明基本的发动机摩擦力矩的输入信号(TBEF),并且表示附加力矩的上述参数(TACCES)的值是作为发动机总力矩和基本的发动机摩擦力矩的函数而进行确定的。
3.如权利要求2的方法,其特征在于,其中表明附加力矩的上述参数(TACCES)的值是作为下列表达式的函数而确定的:
TACCES=TEG-TBEF
4.如权利要求1的方法,其特征在于,所说的上述控制参数中至少其中有几个控制参数的当前值是作为经过滤波的平均值而确定的。
5.如权利要求2的方法,其特征在于,其中所说的发动机和所说的控制单元通过电子数据链路(DL)进行通信,这个链路传送上述的表明发动机总力矩(TEG)和基本的发动机摩擦力矩(TBEF)的信号。
6.如权利要求5的方法,其特征在于,其中所说的数据链路符合SAE J1922和J1939协议中的一个而进行工作。
7.如权利要求1的方法,其特征在于,其中所说的关系是预先确定的并由上述控制单元所存储。
8.如权利要求3的方法,其特征在于,其中所说的关系是预先确定的并由上述控制单元存储。
9.如权利要求1的方法,其特征在于,其中所说的关系是线性的。
10.如权利要求3的方法,其特征在于,其中所说的关系是线性的。
11.如权利要求1的方法,其特征在于,其中所说的传动系统按操作顺序从一个啮合的速比执行动态地换高速档到一个目标齿速比,其中所有操作都不必脱开主离合器而且不考虑操作人员对油门设备的设定程度,该方法包括:
(a) 一个预降操作,其中发动机的供油被调节以便使已啮合的齿速比能脱开;
(b) 在确认脱开了已啮合的齿速比后,一个同步操作(其中发动机的供油被减少)使发动机的旋转速度降低而趋向于同步速度,以便在目标速比上啮合(ES=IS=OS*GRT);和
(c) 在达到基本上是上述发动机的同步转速和使得在上述的目标齿速比上啮合后,一次油门恢复操作(其中使发动机的供油受到所检测到的操作人员对油门设备的设定值所控制);
表明发动机的减速率的控制参数(dES/dt率)的上述值在车辆行驶时由一种方法所确定,此方法包括:
在预降操作时,检测发动机速度;
检测上述同步操作的初始点,在检测到上述同步操作的初始点时,使检测到的发动机速度等于发动机速度初始值(RPMA),并起动正时顺序;
检测油门恢复操作的初始点,在检测到上述油门恢复操作的初始点时,使发动机速度等于发动机速度最终值(RPMB),检测从上述的正时顺序开始以来所经历的时间;以及
确定表明发动机减速率的控制参数的当前值,这个值是作为发动机速度最终值和发动机速度初始值之间的差和经历的时间的函数而进行确定的。
12.如权利要求1的方法,其特征在于,还包括估算作为表明发动机减速率的上述控制参数的值的函数的后随的换高速档的可行性。
13.如权利要求3的方法,其特征在于,还包括估算作为表明发动机减速率的上述控制参数的值的一个函数的后随的换高速档的可行性。
14.一种在车辆处在运动的条件下确定一个控制参数(TACCES)的值的方法,这个控制参数表明在车辆的自动机械传动系统中的一台车辆内燃发动机(E)的附加力矩,该传动系统包括:一台燃油油门控制的内燃发动机(E)、一个操作人员设定的燃油油门设备(P)、一个具有输入轴(16)和适用于驱动车辆驱动轮的输出轴(90)的多速换档机械传动装置(10),上述的输入轴以驱动方式通过一个摩擦主离合器(C)而连接到上述的发动机,该系统还包括一个控制单元(106),用于接收包括表明输入轴或发动机旋转速度的输入信号(ES,IS)在内的各输入信号,并用于按照预定的逻辑规则处理上述信号以确定控制参数和向传动系统的各执行机构发出命令输出信号,这些执行机构包括用于控制发动机供油的装置和用于控制传动系统换档的装置(70),所述方法的特征在于:
确定在发动机减速率(dES/dt率)和附加力矩(TACCES)之间的关系((dES/dt率)=A+(B*TACCES));
确定表明发动机减速率的一个控制参数(dES/dt率)的值;和
确定表明附加力矩的上述控制参数(TACCES)的一个值,该值是作为上述关系和表明发动机减速率的上述控制参数的值的函数而进行确定的。
15.如权利要求14的方法,其特征在于,其中所说的上述控制参数中至少有几个参数的上述的当前值是作为经过滤波的平均值而确定的。
16.如权利要求14的方法,其特征在于,其中所说的发动机和所说的控制单元通过一个传送表明发动机总力矩(TEG)和基本的发动机摩擦力矩(TBEF)的信号的电子数据链路(DL)进行通信。
17.如权利要求16的方法,其特征在于,其中所说的数据链路按符合SAE J1922或J1939协议之一而进行工作。
18.如权利要求14的方法,其特征在于,其中所说的关系是预先确定并由上述控制单元所存储。
19.如权利要求14的方法,其特征在于,其中所说的关系是线性的。
20.如权利要求14的方法,其进一步的特征在于:
确定表明飞轮力矩的一个控制参数(TFW)的值,该值是作为表明附加力矩(TACCES)的控制参数的上述值的函数而进行确定的;和
作为上述表明飞轮力矩(TFW)的控制参数的值的函数而控制传动系统的换档。
21.如权利要求14的方法,其特征在于,其中所说的传动系统按操作顺序从一个啮合的速比执行动态的换高速档到一个目标齿速比,其中所有操作都不必脱开主离合器而且不考虑操作人员对油门设备的设定程度,该控制方法包括:
(a) 一个预降操作,其中发动机的供油被调控以便使已啮合的齿速比能脱开;
(b) 在确认脱开了已啮合的齿速比后,一个同步操作(其中发动机的供油被减少)使得发动机的旋转速度降低而趋于同步速度,以便在目标速比上啮合(ES=IS=OS*GRT);和
(c) 在达到基本上是上述发动机的同步转速和使得在上述的目标齿速比上啮合后,一次油门恢复操作,其中使发动机的供油受到所检测到的操作人员对油门设备的设定值所控制;
上述的对表明发动机的减速率的一个控制参数(dES/dt率)的值的确定包括:
在预降操作中检测发动机的速度;
检测上述同步操作的初始点,在检测到上述同步操作的初始点时,使检测到的发动机速度等于发动机速度初始值(RPMA),并起动正时顺序;
检测油门恢复操作的起始点,在检测到上述油门恢复操作的起始点时,使发动机速度等于发动机速度最终值(RPMB),检测从上述正时顺序开始以来所经历的时间;和
确定表明发动机减速率的控制参数的当前值,该值是作为发动机速度最终值和发动机速度初始值之间的差和经历的时间的函数而进行确定的。
22.如权利要求17的方法,其特征在于,其中所说的传动系统按操作顺序从某一啮合的速比执行动态地换高速档到一个目标齿速比,其中所有操作都不必脱开主离合器而且不考虑操作人员对油门设备的设定程度,该控制方法包括:
(a) 一个预降操作,其中发动机的供油被调控以便使已啮合的齿速比能脱开;
(b) 在确认脱开了已啮合的齿速比后,一个同步操作(其中发动机的供油被减少),使发动机的旋转速度降低而趋向于同步速度以便在目标速比上啮合(ES=IS=OS*GRT);和
(c) 在达到基本上是上述发动机的同步转速和使得在上述的目标齿速比上啮合后,一次油门恢复操作,其中使发动机的供油受到所检测到的操作人员对油门设备的设定值所控制;
上述的对表明发动机的减速率的一个控制参数(dES/dt率)的值的确定包括:
在预降操作时检测发动机速度;
检测上述同步操作的初始点,在检测到上述同步操作的初始点时,使检测到的发动机速度等于发动机速度初始(RPMA),并起动正时顺序;
检测油门恢复操作的初始点,在检测到上述油门恢复操作的初始点时,使发动机速度等于发动机速度最终值(RPMB),检测从上述的正时顺序开始以来所经历的时间;和
确定表明发动机减速率的控制参数的当前值,该值是作为发动机速度最终值和发动机速度初始值之间的差和经历的时间的函数而进行确定的。
23.一种用于车辆的自动机械传动系统中的方法,该传动系统包括一台燃油油门控制的内燃发动机(E)、一个操作员设定的燃油油门设备(P)、一个具有输入轴(16)和适用于驱动车辆驱动轮的输出轴(90)的多速换档机械传动装置(10),上述输入轴以驱动方式通过一个摩擦主离合器(C)而连接到上述的发动机,该系统还包括一个控制单元(106),它用于接收各输入信号,其中包括表明输入轴或发动机旋转速度的输入信号(ES、IS)、表明发动机总力矩的输入信号(TEG)和表明基本的发动机摩擦力矩的输入信号(TBEF),它还用于按照预定的逻辑规则来处理上述信号以确定控制参数并向传动系统的各执行机构发出命令输出信号,这些执行机构包括用于控制发动机供油的装置和用于控制传动系统换档的装置(70),上述的发动机和上述的控制单元通过传送表明发动机总力矩(TEG)和基本的发动机摩擦力矩(TBEF)的上述信号的一个电子数据链路(DL)而进行通信,所述方法用于在发动机为惰转且传动装置或主离合器为脱开的车辆条件下确定表明车辆的内燃发动机(E)的发动机减速率的一个控制参数(dES/dt率)的值,所述方法的特征在于:
确定在发动机减速率(dES/dt率)和附加力矩(TACCES)之间的关系((dES/dt率)=A+(B*TACCES));
确定表明附加力矩的上述控制参数(TACCES)的值,该值是作为下列表达式的函数而进行确定的:
TACCES=TEG-TBEF
和
确定表明发动机减速率的上述控制参数的、一个值,该值是作为表明附加力矩的上述参数的值和上述关系的一个函数来进行确定的。
24.如权利要求23的方法,其特征在于,其中所说的数据链路的工作符合于SAE J1922或J1939协议之一。
25.如权利要求24的方法,其特征在于,其中所说的关系是预先确定并由上述的控制单元所存储。
26.如权利要求24的方法,其特征在于,其中所说的关系是线性的。
27.在车辆自动机械传动系统中的一种控制系统,该传动系统包括一台燃油油门控制的内燃发动机(E)、一个操作员设定的燃油油门设备(P)、一个具有输入轴(16)和适用于驱动车辆驱动轮的输出轴(90)的多速换档机械传动装置(10),上述输入轴以驱动方式通过一个摩擦主离合器(C)而连接到上述的发动机,该系统还具有一个控制单元(106),它用于接收各输入信号,其中包括表明输入轴或发动机旋转速度的输入信号(ES、IS)、表明发动机总力矩的输入信号(TGE)和表明基本的发动机摩擦力矩的输入信号(TBEF),它还用于按照已确定的逻辑规则来处理上述信号以确定控制参数并向传动系统的各执行机构发出命令输出信号,这些执行机构包括用于控制发动机供油的装置和控制传动系统换档的装置(70),所述控制系统用于在发动机为惰转和传动装置处于空档和/或主离合器为脱开的车辆条件下确定表明发动机减速率的一个控制参数(dES/dt率)的值,上述的控制系统的特征在于:
用于确定在发动机减速率(dES/dt率)和附加力矩(TACCES)之间的关系((dES/dt率)=A+((B*TACCES))的装置;
用于确定表明附加力矩的一个控制参数(TACCES)的值的装置;和
用于确定表明发动机减速率的上述控制参数的值的装置,该值是作为表明附加力矩的上述参数的值和上述关系的函数来进行确定的。
28.如权利要求27的控制系统,其特征在于,其中所说的各输入信号包括表明发动机总力矩的输入信号(TEG)和表明基本的发动机摩擦力矩的输入信号(TBEF),并且表明附加力矩的上述参数(TACCES)的值是作为发动机总力矩和其本的发动机摩擦力矩的函数而确定的。
29.如权利要求28的控制系统,其特征在于,表明附加力矩的上述参数(TACCES)的值是作为下列表达式的函数而确定的:
TACCES=TEG-TBEF。
30.如权利要求28的控制系统,其特征在于,上述的发动机和上述的控制单元通过一个传送表明发动机总力矩(TEG)和基本的发动机摩擦力矩(TBEF)的所述信号的电子数据链路(DL)而通信。
31.如权利要求30的控制系统,其特征在于,其中所说的数据链路的工作符合于SAE J1922或J1939协议之一。
32.如权利要求27的控制系统,其特征在于,其中所说的关系是预先确定的和由上述控制单元所存储的。
33.如权利要求28的控制系统,其特征在于,还包括用于估算随后的换高速档的可行性的装置,这种换档是作为表明发动机减速率的上述控制参数的值的函数而进行估算的。
34.一种控制系统,用于当车辆在行驶条件下确定一个控制参数(TACCES)的值,这个参数表明在车辆自动机械传动系统中的车辆内燃发动机(E)的附加力矩,这个传动系统包括一台燃油油门控制的内燃发动机(E)、一个操作员设定的燃油油门设备(P)、一个具有输入轴(16)和适用于驱动车辆驱动轮的输出轴(90)的多速换档机械传动装置(10),上述的输入轴以驱动方式通过一个摩擦主离合器(C)而连接到上述的发动机,该系统还包括一个控制单元(106),它用于接收各输入信号,包括表明输入轴或发动机旋转速度的输入信号(ES,IS),它还用于按照已确定的逻辑规则来处理上述的信号以确定控制参数并向传动系统的各执行机构发出命令输出信号,这些执行机构包括控制发动机供油的装置和控制传动系统换档的装置(70),所述的控制系统的特征在于:
用于确定在发动机减速率(dES/dt率)和附加力矩(TACCES)之间的一种关系((dES/dt率)=A+(B*TACCES))的装置;
用于确定表明发动机减速率的一个控制参数(dES/dt率)的值的装置;
用于确定表明附加力矩的上述控制参数(TACCES)的值的装置,该值是作为上述关系和表明发动机减速率的上述控制参数的值的函数而进行确定的。
35.如权利要求34的控制系统,其进一步的特征在于:
用于确定表明飞轮力矩的一个控制参数(TFW)的值的装置,该值是作为表明附加力矩(TACCES)的上述控制参数的值的函数而进行确定的;
用于作为表明飞轮力矩(TFW)的上述控制参数的值的函数而控制传动系统的换档的装置。
36.如权利要求34的控制系统,其特征在于,其中所说的传动系统按操作顺序执行从一个啮合的速比动态地换高速档到一目标齿速比,其中所有操作都不必脱开主离合器并且不考虑操作人员对油门设备的设定程度,它包括:
(a) 一个预降操作,其中发动机的供油被调控以便使已啮合的齿速比能脱开;
(b) 在确认脱开了已啮合的齿速比后,一个同步操作(其中发动机的供油被减少),使发动机的旋转速度降低而趋向于同步速度,以便在目标速比上啮合(ES=IS=OS*GRT);和
(c) 在达到基本上是上述发动机的同步转速和使得在上述的目标齿速比上啮合后,一次油门恢复操作,其中使发动机的供油受到所检测到的操作人员对油门设备的设定值所控制;
上述的用于确定表明发动机减速率的一个控制参数(dES/dt率)的值的装置包括:
在预降操作期间检测发动机速度的装置;
用于检测上述同步操作的初始点、并在检测到该同步操作的初始点时使检测到的发动机速度等于发动机速度初始值(RPMA)并起动正时顺序的装置;
用于检测油门恢复操作的初始点、并在检测到该油门恢复的初始点时使发动机速度等于发动机速度最终值(RPMB)和检测从上述的正时序列开始以来所经历的时间的装置;
用于确定表明发动机减速率的控制参数当前值的装置,该值是作为发动机速度最终值和发动机速度初始值之间的差和经历的时间的函数而进行确定的。
37.在车辆的自动化机械传动系统中的一种控制系统,该传动系统包括一台燃油油门控制的内燃发动机(E)、一个操作员设定的燃油油门设备(P)、一个具有输入轴(16)和适用于驱动车辆的驱动轮的输出轴(90)的多速换档机械传动装置(10),上述输入轴以驱动方式通过一个摩擦主离合器(C)而连接到上述的发动机,该系统还包括一个控制单元(106),它用于接收各输入信号,其中包括表明输入轴或发动机旋转速度的输入信号(ES、IS),表明发动机总力矩的输入信号(TEG)和表明基本的发动机摩擦力矩的输入信号(TBEF),它还用于按照已确定的逻辑规则来处理上述信号以确定控制参数并向传动系统的各执行机构发出命令输出信号,这些执行机构包括用于控制发动机供油的装置和用于控制传动系统的换档的装置(70),上述的发动机和上述的控制单元通过传送表明发动机总力矩(TEG)和基本的发动机摩擦力矩(TBEF)的上述信号的一个电子数据链路(DL)而进行通信,所述控制系统用于在发动机为惰转且传动装置或主离合器是脱开的车辆条件下确定表明车辆的内燃发动机(E)的发动机减速率的一个控制参数(dES/dt率)的值,该控制系统的特征在于:
用于确定在发动机减速率(dES/dt率)和附加力矩(TACCES)之间的一种关系((dES/dt率)=A+(B*TACCES))的装置;
用于确定表明附加力矩的上述控制参数(TACCES)的值的装置,该值是作为下列表达式的函数而进行确定的;
TACCES=TEG-TBEF
和
用于确定表明发动机减速率的上述控制参数的值的装置,该值是作为表明附加力矩的上述参数的值和上述关系的函数而进行确定的。
38.如权利要求37的控制系统,其特征在于,其中所说的数据链路的工作符合于SAE J1922或J1939协议之一。
39.如权利要求38的控制系统,其特征在于,其中所说的关系是预先确定的并由上述的控制单元所存储的。
40.如权利要求37的控制系统,其特征在于,其中所说的关系是线性的。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US242824 | 1994-05-16 | ||
| US08/242,824 US5582069A (en) | 1994-05-16 | 1994-05-16 | Engine accessory torque and engine deceleration rate determination method/system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1125859A CN1125859A (zh) | 1996-07-03 |
| CN1101013C true CN1101013C (zh) | 2003-02-05 |
Family
ID=22916328
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN95106048A Expired - Fee Related CN1101013C (zh) | 1994-05-16 | 1995-05-16 | 发动机附加力矩和发动机减速率的确定方法/系统 |
Country Status (10)
| Country | Link |
|---|---|
| US (2) | US5582069A (zh) |
| EP (1) | EP0683336B1 (zh) |
| JP (1) | JPH0811590A (zh) |
| KR (1) | KR100237839B1 (zh) |
| CN (1) | CN1101013C (zh) |
| AT (1) | ATE162281T1 (zh) |
| BR (1) | BR9502095A (zh) |
| CA (1) | CA2148163C (zh) |
| DE (1) | DE69501427T2 (zh) |
| ES (1) | ES2112610T3 (zh) |
Families Citing this family (59)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5582558A (en) * | 1995-07-27 | 1996-12-10 | Rockwell International Corporation | Combined system for assisting shifting of manual transmission |
| US5573477A (en) * | 1995-07-27 | 1996-11-12 | Rockwell International Corporation | Method and apparatus for assisting in shifting transmission to neutral |
| SE504717C2 (sv) * | 1996-02-07 | 1997-04-14 | Scania Cv Ab | Förfarande för korrigering av motormomentet vid växling |
| DE19709417A1 (de) * | 1996-03-14 | 1997-10-30 | Luk Getriebe Systeme Gmbh | Vorrichtung zur Ansteuerung eines Drehmomentübertragungssystems und eines Getriebes, sowie ein Verfahren hierfür |
| US5720696A (en) * | 1996-04-25 | 1998-02-24 | General Motors Corporation | Method of shift control using moment of inertia estimation |
| US6792344B2 (en) * | 1997-04-25 | 2004-09-14 | Hitachi, Ltd. | Automotive control apparatus and method |
| US6052638A (en) * | 1998-02-20 | 2000-04-18 | Eaton Corporation | Engine flywheel torque control |
| US5989155A (en) | 1998-04-01 | 1999-11-23 | Eaton Corporation | Engine fuel control for completing shifts in controller-assisted, manually shifted transmission |
| US5911787A (en) | 1998-04-01 | 1999-06-15 | Eaton Corporation | Dynamic range shift actuation |
| US6042504A (en) | 1998-04-01 | 2000-03-28 | Eaton Corporation | Range shift control |
| US5984831A (en) | 1998-04-01 | 1999-11-16 | Eaton Corporation | Adaptive upshift jaw clutch engagement control |
| IT1301760B1 (it) * | 1998-06-19 | 2000-07-07 | Ducati Energia Spa | Metodo e dispositivo per il controllo del minimo motore |
| US6113516A (en) * | 1999-01-14 | 2000-09-05 | Eaton Corporation | Adaptive automated transmission upshift control |
| US6205389B1 (en) * | 1999-09-16 | 2001-03-20 | Eaton Corporation | Method/system for resetting the value of a control parameter indicative of gross combine weight of vehicles to a default value thereof |
| US6325743B1 (en) | 1999-01-14 | 2001-12-04 | Eaton Corporation | Automated transmission upshift control |
| US6149545A (en) * | 1999-01-14 | 2000-11-21 | Eaton Corporation | Automated transmission upshift control |
| US6146310A (en) * | 1999-01-15 | 2000-11-14 | Eaton Corporation | Adaptive automated transmission downshift control |
| US6066071A (en) * | 1999-01-15 | 2000-05-23 | Eaton Corporation | Automated transmission downshift control |
| JP3624741B2 (ja) * | 1999-05-17 | 2005-03-02 | 三菱自動車工業株式会社 | 無段変速機の制御装置 |
| US6123644A (en) * | 1999-07-19 | 2000-09-26 | Eaton Corporation | Adaptive anti-hunt logic for automated transmission downshift control |
| US6126569A (en) * | 1999-07-19 | 2000-10-03 | Eaton Corporation | Starting and driveline shock protection control method and system |
| US6226585B1 (en) * | 2000-04-18 | 2001-05-01 | Ford Global Technologies, Inc. | Torque estimation method for an internal combustion engine |
| US6409629B1 (en) | 2000-05-17 | 2002-06-25 | Eaton Corporation | Automated transmission upshift control with upshift brake thermal protection |
| US6491603B1 (en) | 2000-09-12 | 2002-12-10 | Eaton Corporation | Automated transmission shift control |
| US6526816B2 (en) * | 2000-12-13 | 2003-03-04 | Eaton Corporation | Transmission gear life monitor system |
| US6502476B2 (en) | 2000-12-13 | 2003-01-07 | Eaton Corporation | Transmission system utilizing centrifugal clutch |
| US6406403B1 (en) * | 2000-12-21 | 2002-06-18 | Eaton Corporation | Torque ramp down control |
| GB2371839A (en) * | 2001-02-01 | 2002-08-07 | Eaton Corp | Control for selecting automated transmission system shift strategy |
| US6641504B2 (en) | 2001-03-21 | 2003-11-04 | Eaton Corporation | Method and system for establishing an engine speed target for use by a centrifugal clutch control system to launch a vehicle |
| US6539820B2 (en) | 2001-03-21 | 2003-04-01 | Eaton Corporation | Method and system for transmission utilizing centrifugal clutch to overcome transmission tooth-butt |
| US6461273B1 (en) | 2001-06-01 | 2002-10-08 | Eaton Corporation | Automated transmission upshift brake control |
| US6633806B2 (en) | 2001-08-30 | 2003-10-14 | Eaton Corporation | Control for transmission system utilizing a centrifugal clutch |
| GB2389878A (en) * | 2002-06-18 | 2003-12-24 | Eaton Corp | Method of detecting false neutral in a transmission system |
| DE10330517A1 (de) * | 2003-07-05 | 2005-03-03 | Zf Friedrichshafen Ag | Verfahren zur Steuerung und Regelung einer Getriebebremse in einem Kraftfahrzeug-Automatgetriebe |
| US7480555B2 (en) * | 2004-12-16 | 2009-01-20 | Eaton Corporation | Method for controlling centrifugal clutch engagement using engine torque requests |
| US20080194383A1 (en) * | 2005-09-08 | 2008-08-14 | Volvo Lastvagnar Ab | Method for Adapting an Automated Mechanical Transmission Based on a Measured Pto Load |
| ATE490114T1 (de) * | 2005-09-08 | 2010-12-15 | Volvo Lastvagnar Ab | Verfahren und anordnung zum anpassen von gangwechselstrategien in schwerlastfahrzeugen mit einem automatikgetriebe unter zapfwellenlast |
| JP2007315472A (ja) * | 2006-05-25 | 2007-12-06 | Iseki & Co Ltd | トラクターの走行装置 |
| US7324888B1 (en) * | 2006-10-02 | 2008-01-29 | Ford Global Technologies, Llc | Computationally efficient data-driven algorithms for engine friction torque estimation |
| US7905812B2 (en) * | 2007-02-02 | 2011-03-15 | Eaton Corporation | PTO brake |
| US8046140B2 (en) | 2008-01-18 | 2011-10-25 | Eaton Corporation | PTO overspeed protection strategy |
| DE102008040126A1 (de) * | 2008-07-03 | 2010-01-07 | Zf Friedrichshafen Ag | Verfahren zum Ansteuern eines Schaltvorganges bei einem automatischen Getriebe eines Nutzfahrzeuges |
| DE102011075913A1 (de) * | 2011-05-16 | 2012-11-22 | Zf Friedrichshafen Ag | Verfahren zum Bestimmen eines Schaltablaufes eines Übersetzungswechsels einer Getriebeeinrichtung eines Fahrzeugantriebsstranges |
| DE102011080849A1 (de) | 2011-08-11 | 2013-02-14 | Zf Friedrichshafen Ag | Verfahren zur Schaltsteuerung eines automatisierten Gruppengetriebes |
| US8948977B2 (en) * | 2011-12-28 | 2015-02-03 | Caterpillar Inc. | Systems and methods for machine implement control |
| DE102012208881A1 (de) * | 2012-05-25 | 2013-11-28 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Adaptieren eines Verlustdrehmoments eines Verbrennungsmotors |
| JP6261347B2 (ja) * | 2013-03-12 | 2018-01-17 | 泰三 嶋田 | エンジンの摩擦損失測定方法およびエンジンの駆動状態検出方法 |
| US9267480B1 (en) * | 2013-05-10 | 2016-02-23 | The Boeing Company | Electrical power generating engine flywheel with active torque control |
| KR101484215B1 (ko) * | 2013-06-19 | 2015-01-16 | 현대자동차 주식회사 | 하이브리드 차량의 시동모터 고장시 엔진 시동 방법 및 시스템 |
| CN103697154B (zh) * | 2013-11-29 | 2016-04-27 | 浙江吉利控股集团有限公司 | 一种amt自动变速器的换挡方法 |
| RU2550585C1 (ru) * | 2014-01-17 | 2015-05-10 | Открытое акционерное общество "АВИАЦИОННЫЕ РЕДУКТОРА И ТРАНСМИССИИ - ПЕРМСКИЕ МОТОРЫ" (ОАО "Редуктор-ПМ") | Механизм загрузки крутящим моментом |
| JP2016057114A (ja) * | 2014-09-08 | 2016-04-21 | 泰三 嶋田 | エンジンの慣性モーメント測定方法およびエンジンの摩擦損失測定方法 |
| DE102016211950A1 (de) * | 2016-06-30 | 2018-01-04 | Zf Friedrichshafen Ag | Verfahren zur Übertragung und Dämpfung von Drehmomenten |
| DE102018207097A1 (de) * | 2018-05-08 | 2019-11-14 | Zf Friedrichshafen Ag | Drehmomentermittlung bei Nebenverbrauchern |
| CN111376892B (zh) * | 2018-12-29 | 2022-07-15 | 河南森源重工有限公司 | 一种车辆、车辆转毂测试控制方法及装置 |
| DE102019216211A1 (de) * | 2019-10-22 | 2021-04-22 | Zf Friedrichshafen Ag | Verfahren und Steuergerät zum Betreiben eines Antriebsstrangs eines Kraftfahrzeugs mit einem Nebenabtrieb |
| CN113819234A (zh) * | 2021-08-18 | 2021-12-21 | 潍柴动力股份有限公司 | 一种换挡辅助控制方法、车辆 |
| DE102022200607A1 (de) | 2022-01-20 | 2023-07-20 | Zf Friedrichshafen Ag | Kraftfahrzeuggetriebe, insbesondere Elektrofahrzeuggetriebe |
| DE102022200615A1 (de) | 2022-01-20 | 2023-07-20 | Zf Friedrichshafen Ag | Kraftfahrzeuggetriebe, insbesondere Elektrofahrzeuggetriebe |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3942365A (en) * | 1975-04-21 | 1976-03-09 | Rca Corporation | Power test means and method for internal combustion engines |
| US4361060A (en) * | 1978-01-24 | 1982-11-30 | Smyth Robert Ralston | Mechanical automatic transmission |
| DE3122362A1 (de) * | 1981-06-05 | 1983-01-05 | Xaver Fendt & Co, 8952 Marktoberdorf | Verfahren zur bestimmung der momentanleistung eines antriebsmotors |
| JPS59120748A (ja) * | 1982-12-27 | 1984-07-12 | Nissan Motor Co Ltd | エンジンの発生トルク推定装置 |
| DE3416496A1 (de) * | 1984-05-04 | 1985-11-07 | Brown, Boveri & Cie Ag, 6800 Mannheim | Verfahren und schaltungsanordnung zum simulieren von pruefstandstraegheitsmomenten |
| GB8418749D0 (en) * | 1984-07-23 | 1984-08-30 | Eaton Ltd | Semi-automatic transmission control |
| US4595986A (en) * | 1984-10-09 | 1986-06-17 | Eaton Corporation | Method for control of automatic mechanical transmission system utilizing a microprocessor based electronic controller |
| US5231582A (en) * | 1989-03-29 | 1993-07-27 | Nissan Motor Company | Shifting control system for automotive automatic power transmission with enhanced variable shift pattern selection depending upon a resistance based upon vehicle acceleration and an engine parameter |
| US5053962A (en) * | 1989-06-19 | 1991-10-01 | Eaton Corporation | Automatic shift preselection mode for mechanical transmission system with semi-automatic shift implementation |
| US5053961A (en) * | 1989-06-19 | 1991-10-01 | Eaton Corporation | Semi-automatic shift implementation for mechanical transmission system |
| US5053959A (en) * | 1989-06-19 | 1991-10-01 | Eaton Corporation | Control system and method for sensing and indicating neutral in a semi-automatic mechanical transmission system |
| US5089965A (en) * | 1989-07-24 | 1992-02-18 | Eaton Corporation | Shift prohibiting for automatic shift preselection mode for mechanical transmission system with semi-automatic shift implementation |
| JP2827396B2 (ja) * | 1990-02-16 | 1998-11-25 | トヨタ自動車株式会社 | 車両用自動変速機 |
| KR940009849B1 (ko) * | 1990-04-17 | 1994-10-18 | 미쓰비시덴키가부시키가이샤 | 자동변속기 제어장치 |
| US5241476A (en) * | 1990-05-08 | 1993-08-31 | Chrysler Corporation | Acceleration prediction responsive adaptive upshift control |
| JPH0494439A (ja) * | 1990-08-09 | 1992-03-26 | Japan Electron Control Syst Co Ltd | 内燃機関の出力表示装置 |
| DE4240762A1 (en) * | 1991-12-03 | 1993-06-09 | Hitachi, Ltd., Tokio/Tokyo, Jp | Automatic gearbox control for motor vehicle - uses vehicle wt. calculator, output torque estimator and stored gear setting tables to select gear taking into account required acceleration |
| US5172609A (en) * | 1992-03-02 | 1992-12-22 | Saturn Corporation | Gradeability-based shift pattern control for an automatic transmission |
| DE4304779B4 (de) * | 1992-06-20 | 2005-11-24 | Robert Bosch Gmbh | Vorrichtung zur Steuerung des von einer Antriebseinheit eines Fahrzeugs abzugebenden Drehmoments |
| US5425689A (en) * | 1992-07-06 | 1995-06-20 | Eaton Corporation | Engine brake enhanced upshift control method/system |
| US5335566A (en) * | 1992-07-06 | 1994-08-09 | Eaton Corporation | Shift control method/system |
| US5272939B1 (en) * | 1992-07-06 | 1994-12-06 | Eaton Corp | Shift enable control method/system |
| US5608626A (en) * | 1993-03-26 | 1997-03-04 | Hitachi, Ltd. | Drive shaft torque controlling apparatus for use in a vehicle having a power transmission mechanism and method therefor |
-
1994
- 1994-05-16 US US08/242,824 patent/US5582069A/en not_active Expired - Lifetime
- 1994-09-21 US US08/309,713 patent/US5620392A/en not_active Expired - Lifetime
-
1995
- 1995-04-28 CA CA002148163A patent/CA2148163C/en not_active Expired - Fee Related
- 1995-05-01 DE DE69501427T patent/DE69501427T2/de not_active Expired - Fee Related
- 1995-05-01 AT AT95302963T patent/ATE162281T1/de not_active IP Right Cessation
- 1995-05-01 ES ES95302963T patent/ES2112610T3/es not_active Expired - Lifetime
- 1995-05-01 EP EP95302963A patent/EP0683336B1/en not_active Expired - Lifetime
- 1995-05-12 KR KR1019950011671A patent/KR100237839B1/ko not_active IP Right Cessation
- 1995-05-15 BR BR9502095A patent/BR9502095A/pt not_active IP Right Cessation
- 1995-05-16 JP JP7141136A patent/JPH0811590A/ja active Pending
- 1995-05-16 CN CN95106048A patent/CN1101013C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| KR950033019A (ko) | 1995-12-22 |
| KR100237839B1 (ko) | 2000-01-15 |
| ATE162281T1 (de) | 1998-01-15 |
| DE69501427D1 (de) | 1998-02-19 |
| US5582069A (en) | 1996-12-10 |
| EP0683336B1 (en) | 1998-01-14 |
| EP0683336A1 (en) | 1995-11-22 |
| ES2112610T3 (es) | 1998-04-01 |
| CN1125859A (zh) | 1996-07-03 |
| DE69501427T2 (de) | 1998-09-03 |
| US5620392A (en) | 1997-04-15 |
| CA2148163A1 (en) | 1995-11-17 |
| BR9502095A (pt) | 1996-01-09 |
| JPH0811590A (ja) | 1996-01-16 |
| CA2148163C (en) | 2000-05-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1101013C (zh) | 发动机附加力矩和发动机减速率的确定方法/系统 | |
| CN1101012C (zh) | 发动机飞轮力矩的确定方法/系统 | |
| CN1113224C (zh) | 确定车辆的整车总重量的方法和系统 | |
| CN1040083C (zh) | 换档控制方法和换档控制系统 | |
| CN1068550C (zh) | 自适应换档控制方法/系统 | |
| CN1153694C (zh) | 改变传动比时的变速箱侧和发动机侧减速装置的独立控制 | |
| CN1066253C (zh) | 驱动系统力矩检测 | |
| EP2127980B1 (en) | Transmission turbine acceleration control for managing vehicle acceleration | |
| CN1088520A (zh) | 换挡可行性控制方法和控制系统 | |
| CN105209798B (zh) | 车辆的变速控制装置 | |
| CN1110947A (zh) | 发动机制动增强的换高挡控制方法及系统 | |
| CN1717352A (zh) | 确定发动带有混合动力传动系的车辆所需扭矩的方法和系统 | |
| EP3534043A1 (en) | System for selecting a transmission economy-based shift schedule | |
| CN1163368C (zh) | 用于机动车传动系的控制系统及其方法 | |
| CN1818430A (zh) | 装有锁止离合器的车辆的再生控制装置 | |
| CN1230647A (zh) | 动态范围转换促动 | |
| CN1174305A (zh) | 带有零发动机飞轮转矩确定的自动传动系统控制方法 | |
| EP1667868A1 (en) | Method for regulating the rotational speed of a clutch-independent power take-off | |
| CN1662403A (zh) | 用于机动车的驱动装置 | |
| CN1196876C (zh) | 自适应换高档的爪式接合套接合控制 | |
| EP1606529B1 (en) | System and method for controlling engagement of a clutch | |
| CN100357143C (zh) | 起步发动机扭矩限制 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20030205 Termination date: 20120516 |