CN108338134B - 双轴承绕线轮的卷筒制动装置 - Google Patents
双轴承绕线轮的卷筒制动装置 Download PDFInfo
- Publication number
- CN108338134B CN108338134B CN201810199885.0A CN201810199885A CN108338134B CN 108338134 B CN108338134 B CN 108338134B CN 201810199885 A CN201810199885 A CN 201810199885A CN 108338134 B CN108338134 B CN 108338134B
- Authority
- CN
- China
- Prior art keywords
- brake shoe
- brake
- fixing member
- spool
- drum
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000009977 dual effect Effects 0.000 title claims abstract description 37
- 230000002093 peripheral effect Effects 0.000 description 31
- 238000004804 winding Methods 0.000 description 6
- 230000002265 prevention Effects 0.000 description 5
- 241000276420 Lophius piscatorius Species 0.000 description 3
- 238000005266 casting Methods 0.000 description 3
- 229920003002 synthetic resin Polymers 0.000 description 3
- 239000000057 synthetic resin Substances 0.000 description 3
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 230000010355 oscillation Effects 0.000 description 2
- 229920006122 polyamide resin Polymers 0.000 description 2
- 210000003813 thumb Anatomy 0.000 description 2
- 229910000861 Mg alloy Inorganic materials 0.000 description 1
- 229930182556 Polyacetal Natural products 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 229920006324 polyoxymethylene Polymers 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
Images





Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K89/00—Reels
- A01K89/015—Reels with a rotary drum, i.e. with a rotating spool
- A01K89/0155—Antibacklash devices
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Environmental Sciences (AREA)
- Animal Husbandry (AREA)
- Biodiversity & Conservation Biology (AREA)
- Braking Arrangements (AREA)
Abstract
本发明提供一种双轴承绕线轮的卷筒制动装置,能够容易地设定制动靴的能够动作状态和不能动作状态。本双轴承绕线轮(10)的卷筒制动装置(25)利用离心力来对旋转自如地装配在绕线轮主体(11)上的卷筒(14)进行制动,本卷筒制动装置包括旋转部件(62)、制动靴(64)、制动鼓(66)和选择固定部件(67)。旋转部件与卷筒的旋转联动地旋转。制动靴支承于旋转部件,且能够在利用离心力对卷筒进行制动的制动位置与不制动而允许卷筒的旋转的非制动位置之间移动。制动鼓能够与制动靴接触。选择固定部件装配于旋转部件。选择固定部件通过选择性地与制动靴卡合,来将制动靴选择性地固定在非制动位置。
Description
本申请是申请号201410193988.8、申请日为2014年5月9日、发明名称为“双轴承绕线轮的卷筒制动装置”的发明专利申请的分案申请。
技术领域
本发明涉及双轴承绕线轮的卷筒制动装置,特别涉及对旋转自如地装配在绕线轮主体上的卷筒进行制动的双轴承绕线轮的卷筒制动装置。
背景技术
在用于抛投的双轴承绕线轮中,为了防止缠结而一般使制动力作用于卷筒。作为这种卷筒制动装置已知有这样的卷筒制动装置:利用通过卷筒的旋转而产生的离心力来对卷筒进行制动,并且能够从绕线轮主体的外部调整该制动力。另外,缠结是在抛投时由于卷筒的旋转速度线放出速度快而产生的。
在现有的卷筒制动装置中公开了这样的卷筒制动装置:使制动靴摆动,并使制动靴与制动鼓接触,由此使制动力作用于卷筒(参照专利文献1)。
具体地讲,在该卷筒制动装置中,制动靴与卷筒的旋转联动地摆动,并与制动鼓接触。更具体地讲,在卷筒轴上固定有支架,在该支架上设置有销。制动靴能够摆动地装配于该销。由此,当卷筒旋转时,借助其离心力,使制动靴绕销摆动并与制动鼓接触。这样,制动力作用在卷筒上。并且,在制动靴中设置有凹部(切换凹部),在支架上设置有突起(切换突起)。在使制动靴不能动作的情况下,使制动靴的凹部与支架的突起弹性卡合。由此,以制动靴不动作的方式保持制动靴的姿势。
现有技术文献
专利文献1:日本特开2013-000086。
在现有的卷筒制动装置中,在制动靴的能够动作的状态下,制动靴绕销摆动并能够与制动鼓接触。并且,在使制动靴从能够动作的状态变更为不能动作的状态的情况下,使制动靴的凹部与支架的突起弹性卡合。具体来说,垂钓者使多个制动靴各自的凹部与支架的突起分别地弹性卡合。因此存在以下问题:垂钓者希望处于不能动作的状态的制动靴的数量越多,垂钓者将制动靴与支架进行弹性卡合的操作越繁杂。另外还存在以下问题:由于制动靴是小型部件,因此分别地选择该制动靴是困难的。进而还存在以下问题:由于制动靴是小型部件,因此制动靴的凹部与支架的突起的弹性卡合容易脱离。另外,即使在将制动靴从不能动作的状态变更为能够动作的状态的情况下,上述的操作方面的问题也是同样会产生的问题。
发明内容
本发明是鉴于如上所述的问题而完成的,本发明的目的在于能够容易地设定制动靴的能够动作状态和不能动作状态。
本发明第1方面的双轴承绕线轮的卷筒制动装置利用离心力来对旋转自如地装配在绕线轮主体上的卷筒进行制动。本卷筒制动装置包括旋转部件、制动靴、制动鼓和选择固定部件。旋转部件与卷筒的旋转联动地旋转。制动靴支承于旋转部件,且能够在利用离心力对卷筒进行制动的制动位置与不制动而允许卷筒的旋转的非制动位置之间移动。制动鼓能够与制动靴接触。选择固定部件装配于旋转部件。选择固定部件通过选择性地与制动靴卡合,来将制动靴选择性地固定在非制动位置。
在本卷筒制动装置中,制动靴能够在制动位置与非制动位置之间移动地支承于旋转部件。例如,在选择固定部件不与制动靴卡合的情况下,制动靴在制动位置与卷筒及旋转部件的旋转联动地与制动鼓接触。另一方面,在选择固定部件与某个制动靴卡合的情况下,该制动靴被固定在非制动位置,不能与制动鼓接触。另外,即使选择固定部件与某个制动靴卡合,不与选择固定部件卡合的其他制动靴也能够在制动位置与制动靴接触。
这样,在本卷筒制动装置中,通过使选择固定部件动作,能够选择性地固定制动靴,使制动靴在制动位置不能动作。另外,通过使选择固定部件动作,能够选择性地使制动靴动作,使制动靴在非制动位置能够动作。即,在本卷筒制动装置中,利用选择固定部件能够容易地设定制动靴的能够动作状态和不能动作状态。
具体来说,即使制动靴的数量增多,仅利用选择固定部件也能够容易地固定制动靴。另外,即使制动靴是小型部件,仅利用选择固定部件也能够容易地选择制动靴。进而,通过使选择固定部件与制动靴卡合,能够将制动靴可靠地固定到旋转部件。
本发明第2方面的双轴承绕线轮的卷筒制动装置中,在第1方面记载的卷筒制动装置中,选择固定部件相对于旋转部件装配成能够旋转。
在该情况下,通过使选择固定部件相对于旋转部件旋转,能够容易地选择性地固定制动靴。换言之,通过使选择固定部件相对于旋转部件旋转,能够容易地解除制动靴的固定。
本发明第3方面的双轴承绕线轮的卷筒制动装置中,在第1方面记载的卷筒制动装置中,选择固定部件相对于旋转部件装配成能够在沿着旋转部件的旋转轴的方向上移动。
在该情况下,通过使选择固定部件在沿着旋转部件的旋转轴的方向上移动,能够容易地选择性地固定制动靴。换言之,通过使选择固定部件相对于旋转部件在上述的沿着旋转轴的方向上移动,能够容易地解除制动靴的固定。
本发明第4方面的双轴承绕线轮的卷筒制动装置中,在第1至第3方面中的任一方面记载的卷筒制动装置中,选择固定部件具有:装配于旋转部件的主体部;和设置于主体部且能够选择性地与制动靴卡合的卡合部。
在该情况下,通过使选择固定部件的卡合部选择性地与制动靴卡合,能够容易地使制动靴不能动作。另外,通过使选择固定部件的卡合部不与制动靴卡合,能够容易地使制动靴能够动作。
本发明第5方面的双轴承绕线轮的卷筒制动装置中,在第1至第4方面中的任一方面记载的卷筒制动装置中,还具有用于将选择固定部件相对于旋转部件定位的定位结构。
在该情况下,利用定位结构能够容易地定位选择固定部件。即,能够可靠地保持选择固定部件与制动靴卡合的状态。
本发明第6方面的双轴承绕线轮的卷筒制动装置中,在第5方面记载的卷筒制动装置中,定位结构具有:设置于旋转部件和选择固定部件中的任意一方的定位凹部;和设置于旋转部件和选择固定部件中的任意另一方且与定位凹部卡合的定位凸部。
在该情况下,在定位结构中,通过使定位凹部与定位凸部卡合,能够容易地定位选择固定部件。即,能够可靠地保持选择固定部件与制动靴卡合的状态。
本发明第7方面的双轴承绕线轮的卷筒制动装置中,在第1至第6方面中的任一方面记载的卷筒制动装置中,选择固定部件具有将制动靴引导至非制动位置的引导部。
在该情况下,由于卡合部具有将制动靴引导至非制动位置的引导部,因此在使选择固定部件动作的情况下,能够容易地使卡合部与制动靴卡合。
本发明第8方面的双轴承绕线轮的卷筒制动装置中,在第1至第7方面中的任一方面记载的卷筒制动装置中,制动靴具有第一制动靴和第二制动靴。选择固定部件选择性地与第一制动靴和第二制动靴中的至少任一方卡合。
在该情况下,当选择固定部件与第一制动靴卡合时,第一制动靴固定在非制动位置。另外,当选择固定部件与第二制动靴卡合时,第二制动靴固定在非制动位置。进而,当选择固定部件与第一制动靴和第二制动靴卡合时,第一制动靴和第二制动靴固定在非制动位置。这样与选择固定部件卡合的制动靴在非制动位置不能动作。另一方面,不与选择固定部件卡合的制动靴在制动位置能够动作。这样在本卷筒制动装置中,利用选择固定部件能够容易地设定制动靴的能够动作状态和不能动作状态。
本发明第9方面的双轴承绕线轮的卷筒制动装置中,在第8方面记载的卷筒制动装置中,卡合部由第一卡合部和第二卡合部构成。第一卡合部能够与第一制动靴和第二制动靴中的至少任一方卡合。第二卡合部能够与第一制动靴和第二制动靴中的至少任意另一方卡合。
在该情况下,通过使卡合部(第一卡合部/第二卡合部)与第一制动靴和第二制动靴分别卡合,能够容易地使制动靴不能动作。通过解除卡合部(第一卡合部/第二卡合部)与制动靴(第一制动靴/第二制动靴)的卡合,能够容易地使制动靴能够动作。
本发明第10方面的双轴承绕线轮的卷筒制动装置中,在第9方面记载的卷筒制动装置中,第一卡合部能够与第一制动靴和第二制动靴双方卡合。
在该情况下,利用一个卡合部(第一卡合部),能够同时将两个制动靴(第一制动靴和第二制动靴)固定为不能动作。由此,能够根据情况,使两个卡合部(第一卡合部和第二卡合部)与第一制动靴和第二制动靴分别卡合,或者仅利用一个卡合部(第一卡合部)使第一制动靴和第二制动靴双方同时卡合。
本发明第11方面的双轴承绕线轮的卷筒制动装置中,在第9或第10方面记载的卷筒制动装置中,在旋转部件旋转的方向上,第一卡合部比第二卡合部长。
在该情况下,由于第一卡合部形成为比第二卡合部长,因此,例如在使第一卡合部与第一制动靴卡合的状态下,即使使选择固定部件旋转,在维持第一卡合部与第一制动靴的卡合的状态下,也能够使第二卡合部与第二制动靴卡合。
本发明第12方面的双轴承绕线轮的卷筒制动装置中,在第9或第10方面记载的卷筒制动装置中,在沿着旋转轴的方向上,第一卡合部比第二卡合部长。
在该情况下,由于第一卡合部形成为比第二卡合部长,因此,例如在使第一卡合部与第一制动靴卡合的状态下,即使使选择固定部件移动,在维持第一卡合部与第一制动靴的卡合的状态下,也能够使第二卡合部与第二制动靴卡合。
发明效果
根据本发明,能够容易地设定制动靴的能够动作状态和不能动作状态。
附图说明
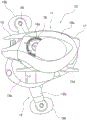
图1是本发明的第一实施方式的双轴承绕线轮的立体图。
图2是其右视图。
图3是其左视图。
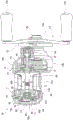
图4是沿着图2的剖开线IV-IV的剖视图。
图5是沿着图2的剖开线V-V的剖视图。
图6是卷筒制动装置的分解立体图。
图7是旋转部件、选择固定部件和制动靴的立体图。
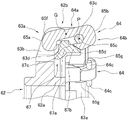
图8是旋转部件、选择固定部件和制动靴的局部剖视图。
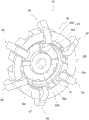
图9是旋转部件、选择固定部件和制动靴的侧视图(非制动状态)。
图10是旋转部件、选择固定部件和制动靴的侧视图(第一制动状态)。
图11是旋转部件、选择固定部件和制动靴的侧视图(第二制动状态)。
图12是选择固定部件的侧视图。
图13是上述第一实施方式中的其他实施方式的旋转部件、选择固定部件和制动靴的局部剖视图。
图14是本发明的第二实施方式的卷筒制动装置的剖视图。
图15是选择固定部件的立体图。
图16是上述第二实施方式中的其他实施方式的卷筒制动装置的剖视图。
图17是选择固定部件的立体图。
附图标记说明
11 绕线轮主体
14 卷筒
10 双轴承绕线轮
23 曳力机构
25、225、325 卷筒制动装置
62、262 旋转部件
64 制动靴
164a、264a 第一制动靴
164b、264b 第二制动靴
164c 第三制动靴
67、167、267、367 旋转固定部件
67a、267a、367a 主体部
67b、367b 卡合部
167b、467b、667b 第一卡合部
267b、567b、767b 第二卡合部。
具体实施方式
<第一实施方式>
1. 绕线轮的整体结构
如图1至图5所示,本发明的实施方式的双轴承绕线轮10是拟饵抛投钓用的双轴承绕线轮。该绕线轮包括:绕线轮主体11;配置于绕线轮主体11的侧方的卷筒旋转驱动用手柄12;配置于手柄12的绕线轮主体11侧的曳力调整用的星形曳力装置13;绕线用的卷筒14;以及装配卷筒14的卷筒轴20。
手柄12是具有臂部12a和以旋转自如的方式装配在臂部12a的两端的把手12b的双手柄形的手柄。如图5所示,臂部12a以不能旋转的方式装配于驱动轴30的前端,通过螺母28紧固于驱动轴30。手柄12配置于后述的第2侧盖16b侧。
2. 绕线轮主体的结构
如图4和图5所示,绕线轮主体11是例如镁合金等轻金属制的部件,具有框架15、和装配于框架15的两侧方的第1侧盖16a及第2侧盖16b、以及轴支承部35。在绕线轮主体11的内部,经由卷筒轴20旋转自如地装配有卷筒14。如图5所示,第1侧盖16a能够拆装地装配于第1侧板15a,并覆盖第1侧板15a的外侧。第2侧盖16b螺纹固定于第2侧板15b,并覆盖第2侧板15b的外侧。
如图1至图5所示,在框架15内配置有:卷筒14;进行拇指按压的情况下成为拇指的衬垫的离合器操作部件17;和用于将钓线均匀地卷绕于卷筒14内的匀绕机构18。
并且,如图4和图5所示,在框架15和第2侧盖16b之间配置有齿轮机构19、离合器机构21、离合器控制机构22、曳力机构23以及抛投控制机构24。设置齿轮机构19是为了将来自手柄12的旋转力传递至卷筒14及匀绕机构18。设置离合器机构21是为了将卷筒14和手柄12连结和切断。设置离合器控制机构22是为了根据离合器操作部件17的操作来控制离合器机构21。
设置曳力机构23是为了对卷筒14的线放出方向的旋转进行制动。设置抛投控制机构24是为了调整卷筒14的旋转时的阻力。并且,在框架15和第1侧盖16a之间配置有用于抑制抛投时的缠结的使用离心力的卷筒制动装置25。
如图4和图5所示,框架15具有:第1侧板15a;与第1侧板15a隔开预定间隔地相互对置配置的第2侧板15b;以及将第1侧板15a和第2侧板15b在前后及下部一体地连结的多个(例如3个)连结部15c。在下侧的连结部15c一体地形成用于装配钓竿的钓竿装配部15d。第1侧板15a在中央部具有以卷筒轴20的轴心C为中心形成为圆形的开口部15e。在开口部15e以能够拆装的方式连结有轴支承部35。
如图4~图6所示,卷筒14设置在第1侧板15a和第2侧板15b之间。卷筒14旋转自如地支承于绕线轮主体11。卷筒14在两侧部具有碟状的凸缘部14a,在两凸缘部14a之间具有筒状的绕线体部14b。卷筒14以能够一体旋转的方式固定于贯通绕线体部14b的内周侧的卷筒轴20。例如,卷筒14通过锯齿结合以能够一体旋转的方式固定于卷筒轴20。
卷筒轴20是例如SUS304等非磁性金属制成的。如图5所示,卷筒轴20贯通第2侧板15b地向第2侧盖16b的外侧延伸。卷筒轴20的一端(图5左端)经由轴承38a旋转自如地支承于轴承收纳部35a。卷筒轴20的向第2侧盖16b的外侧延伸的另一端(图5右端)通过轴承38b旋转自如地支承于形成在第2侧盖16b的凸台部16d。在卷筒轴20的轴向的中间部形成有大径部20a。在大径部20a贯通第2侧板15b的部分,以沿着径向贯通的方式设置有构成离合器机构21的离合器销21a。离合器销21a的两端突出于卷筒轴20的外周面。
如图1所示,离合器操作部件17在第1侧板15a和第2侧板15b之间的后部配置于卷筒14后方。离合器操作部件17与离合器控制机构22连结。离合器操作部件17能够在第1侧板15a和第2侧板15b之间沿上下方向滑动。通过该离合器操作部件17的滑动,将离合器机构21在连结状态和切断状态之间切换。离合器操作部件17通过在第1侧板15a设置于卷筒14侧的引导轴(未图示),而在与钓竿装配部15d接近和远离的上下方向上被引导。
如图5所示,齿轮机构19具有驱动轴30、固定于驱动轴30的驱动齿轮31、以及与驱动齿轮31啮合的筒状的小齿轮32。驱动轴30旋转自如地装配于第2侧板15b和第2侧盖16b。驱动轴30由辊型的单向离合器50来禁止线放出方向的旋转(反转)。单向离合器50装配于第2侧盖16b和驱动轴30之间。驱动齿轮31旋转自如地装配于驱动轴30,并经由曳力机构23与驱动轴30连结。
小齿轮32贯通第2侧板15b地向卷筒轴方向延伸。小齿轮32是在中心贯通有卷筒轴20的筒状部件。小齿轮32通过轴承52和轴承54以旋转自如且沿轴向移动自如的方式装配于第2侧板15b和第2侧盖16b。在小齿轮32的一端(图5左端)形成有与离合器销21a卡合的卡合槽32a。通过该小齿轮32和离合器销21a构成离合器机构21。小齿轮32通过离合器控制机构22而在图5的卷筒轴20的轴心C的上侧所示的离合器接合位置和在轴心C的下侧所示的离合器分离位置之间移动。
如图4所示,离合器控制机构22具有使小齿轮32沿卷筒轴20方向移动的离合器拨叉45。当离合器操作部件17被向离合器分离位置操作时,离合器拨叉45使小齿轮32移动到离合器分离位置。并且,离合器控制机构22具有未图示的离合器返回机构,该离合器返回机构与卷筒14的向线卷取方向的旋转联动地使离合器机构21接合。
3. 卷筒制动机构
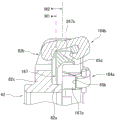
卷筒制动装置25是用于借助离心力对卷筒14进行制动的机构。卷筒制动装置25装配于卷筒轴20和轴支承部35。如图4~图12所示,卷筒制动装置25包括制动鼓66、旋转部件62、多个(例如6个)制动靴64、选择固定部件67以及移动机构68。
3-1. 制动鼓
如图4至图6所示,制动鼓66配置于制动靴64的径向内侧。制动鼓66能够与摆动的制动靴64接触。具体地讲,制动鼓66的至少一部分相对于制动靴64配置于径向外侧。更具体地讲,制动鼓66具有朝向卷筒14倾斜的锥形状的内周面66a(锥面)(参照图6)。锥面66a在制动靴64的径向外侧形成为制动鼓66的内周面。锥面66a朝向卷筒14缩径。该锥面66a与摆动的制动靴64接触。
3-2. 旋转部件
旋转部件62是例如聚酰胺树脂、聚缩醛树脂等合成树脂制的大致圆形的部件。旋转部件62与卷筒14的线放出方向的旋转例如卷筒14的旋转联动地进行旋转。旋转部件62通过压入等适当的固定手段能够一体旋转地连结于卷筒轴20。
如图7所示,旋转部件62具有:内周部固定于卷筒轴20的凸台部62a;配置于凸台部62a的径向外侧的厚壁环状的靴安装部62b;以及连接凸台部62a和靴安装部62b的连接部62c。
凸台部62a是具有供卷筒轴20贯通的带阶梯的贯通孔(未图示)的筒状的部分。贯通孔定位于卷筒轴20。凸台部62a具有定位凹部69a。具体来说,定位凹部69a形成于凸台部62a的外周面。更具体来说,三个定位凹部69a彼此隔开预定间隔地形成于凸台部62a的外周部。定位凹部69a与后述的定位凸部69b构成定位结构69。另外,定位结构69是用于定位选择固定部件67的结构。
如图7和图8所示,靴安装部62b具有:主体部63a;设置于主体部63a的多个(例如6个)靴支承凹部63b;以及设置于靴支承凹部63b的多个(例如6个)摆动轴部63c。
主体部63a一体地形成于连接部62c的外周部。主体部63a(除靴支承凹部63b以外)实质上形成为圆筒状。在主体部63a的内周部形成有沿旋转方向引导选择固定部件67(后述的引导凸部87c)的引导凹部63d(参照图8)。引导凹部63d是沿旋转方向(圆周方向)延伸的槽部。
靴支承凹部63b沿周向隔开间隔地设置。靴支承凹部63b沿卷筒14的旋转方向等间隔地配置。靴支承凹部63b以能够配置制动靴64的宽度凹进形成。如图8所示,摆动轴部63c将制动靴64支承为能够摆动。摆动轴部63c在与卷筒轴20交错的方向上延伸,并与靴支承凹部63b一体形成。摆动轴部63c形成为圆柱形状。
如图7所示,连接部62c是厚壁圆板状的部件,一体地形成于凸台部62a的外周部。在连接部62c的外周侧一体地形成有靴安装部62b的主体部63a。
3-3. 制动靴
制动靴64是例如聚酰胺树脂等具有弹性的合成树脂制的部件。如图7和图8所示,制动靴64以能够绕与卷筒轴20交错的轴摆动的方式装配于旋转部件62。具体地讲,制动靴64以能够摆动的方式装配于旋转部件62的摆动轴部63c。
制动靴64以能够摆动状态和不能摆动状态中的任一状态配置于摆动轴部63c。更具体来说,在能够摆动状态下,制动靴64能够利用离心力来对卷筒14进行制动。这里,制动靴64对卷筒14进行制动的位置为制动位置(参照图7)。另外,在不能摆动状态下,制动靴64不对卷筒14进行制动(非制动),允许卷筒14的旋转。这里,制动靴64不对卷筒14进行制动的位置为非制动位置(参照图8)。不能摆动状态是通过选择固定部件67与制动靴64卡合来实现的。关于制动靴64与选择固定部件67的卡合在后面说明。
如图8所示,制动靴64具有:主体部64a;装配于摆动轴部63c的装配部64b;与主体部64a接触来用于防止主体部64a的晃动的防止晃动部64c。主体部64a具有第一端65a和与第一端65a相反一侧的第二端65b。主体部64a是从第一端65a朝向第二端65b较长的部件。在第一端65a形成有与制动鼓66接触的接触部65f。接触部65f形成为圆弧状。
另外,主体部64a具有一对凸台部65g。凸台部65g以从主体部64a向外侧突出的方式一体地形成于主体部64a。凸台部65g配置于主体部64a与靴支承凹部63b的壁部之间,能够在旋转部件62的靴支承凹部63b的壁部滑动。
装配部64b是将制动靴64装配到摆动轴部63c的部分。装配部64b在第二端65b与重心G之间设置于主体部64a。装配部64b具有C字形状的装配凹部65c和被卡合部65d。
装配凹部65c与摆动轴部63c嵌合。例如,装配凹部65c以间隙配合的方式与摆动轴部63c嵌合。装配凹部65c的开口部形成为宽度比摆动轴部63c的直径窄。被卡合部65d与选择固定部件67卡合。详细来说,被卡合部65d与后述的选择固定部件67的卡合部67b抵接。
防止晃动部64c从主体部64a向外侧突出并一体地形成于主体部64a。详细来说,两个防止晃动部64c一体地形成于主体部64a的两侧。防止晃动部64c能够在靴安装部62b的主体部63a滑动。防止晃动部64c能够在靴安装部62b的主体部63a滑动。
当卷筒14旋转时,具有如上所述的结构的制动靴64利用作用于重心G的离心力,而以摆动轴心P为中心摆动。
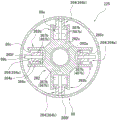
另外,在图9至图11中,将六个制动靴64中在径向上彼此对置的三组制动靴64分别记为第一制动靴164a、第二制动靴164b、第三制动靴164c。第一制动靴164a、第二制动靴164b和第三制动靴164c各自的结构与上述的结构相同。
3-4. 选择固定部件
如图7和图8所示,选择固定部件67装配于旋转部件62。在本实施例中,选择固定部件67相对于旋转部件62装配成能够旋转。选择固定部件67能够选择性地与制动靴64卡合。例如,选择固定部件67选择性地与第一制动靴164a和第二制动靴164b中的至少任一方卡合。在选择固定部件67与制动靴64(第一制动靴164a和/或第二制动靴164b)卡合的情况下,将该制动靴64固定在非制动位置。
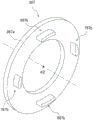
如图8和图12所示,选择固定部件67具有主体部67a、卡合部67b、定位凸部69b以及支撑部67c。主体部67a旋转自如地装配于旋转部件62。主体部67a配置于靴安装部62b的内周侧。主体部67a形成为圆环状。
卡合部67b设置于主体部67a。详细来说,卡合部67b设置于主体部67a的外周部。更详细来说,多个(例如四个)卡合部67b彼此隔开间隔地设置于主体部67a的外周部。卡合部67b能够选择性地与第一制动靴164a和第二制动靴164b中的至少任一方卡合。卡合部67b能够根据相对于旋转部件62的旋转量,来选择性地与第一制动靴164a和第二制动靴164b中的至少任一方卡合。
在图12中,将四个卡合部67b中在径向上彼此对置的两组卡合部67b分别记为第一卡合部167b和第二卡合部267b。另外,在图12中,以下所示的第一卡合部167b和第二卡合部267b的详细说明的标记只被标注于一个第一卡合部167b和一个第二卡合部267b。
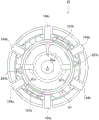
图9表示两个第一制动靴164a、两个第二制动靴164b以及两个第三制动靴164c(六个制动靴64)为能够摆动的状态。即,在该状态下,两个第一卡合部167b和两个第二卡合部267b(四个卡合部67b)与第一制动靴164a、第二制动靴164b以及第三制动靴164c不卡合。
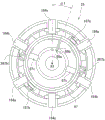
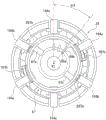
如图10所示,第一卡合部167b在预定的第一旋转角度α1处能够与第一制动靴164a卡合。另外,如图11所示,在预定的第二旋转角度α2处,第一卡合部167b能够与第一制动靴164a卡合,第二卡合部267b能够与第二制动靴164b卡合。如图12所示,在主体部67a的外周部的圆周方向(旋转部件旋转的方向)上,第一卡合部167b以第一卡合部167b比第二卡合部267b长的方式一体地形成于主体部67a。
如图12所示,第一卡合部167b具有第一靴引导部87a(引导部的一例)、第一抵接部87b和引导凸部87c。第一靴引导部87a是将制动靴64向非制动位置引导的部分。第一靴引导部87a形成为锥状。另外,在本实施例中,一对第一靴引导部87a形成于第一卡合部167b中的圆周方向的两端部,但是也可以只形成于与制动靴接触的一端部。
如图12所示,第一抵接部87b是与制动靴64抵接(卡合)的部分。如图12所示,第一抵接部87b形成于第一卡合部167b中的圆周方向的中央部。换言之,第一抵接部87b在一对第一靴引导部87a之间形成于第一卡合部167b。如图8所示,第一抵接部87b与制动靴64的被卡合部65d抵接,沿半径方向按压制动靴64。由此将制动靴64定位在非制动位置。
如图8和图12所示,引导凸部87c是与旋转部件62卡合而沿旋转方向被引导的部分。引导凸部87c形成为从第一靴引导部87a的外周部向外侧突出。引导凸部87c与旋转部件62的引导凹部63d(槽部)卡合,能够沿旋转方向(圆周方向)移动。即,引导凸部87c被引导凹部63d引导,由此选择固定部件67能够稳定地旋转。
如图12所示,第二卡合部267b能够与第二制动靴164b卡合。具体来说,如图11所示,第二卡合部267b在预定的第二旋转角度α2处能够与第二制动靴164b卡合。更具体来说,在预定的第二旋转角度α2处,第一卡合部167b与第一制动靴164a卡合,第二卡合部267b与第二制动靴164b卡合。
第二卡合部267b具有第二靴引导部88a(引导部的一例)和第二抵接部88b。第二靴引导部88a是将制动靴64向非制动位置引导的部分。第二靴引导部88a形成为锥状。另外,在本实施例中,一对第二靴引导部88a形成于第二卡合部267b中的圆周方向的两端部,但是也可以只形成于与制动靴接触的一端部。
第二抵接部88b是与制动靴抵接(卡合)的部分。如图12所示,第二抵接部88b形成于第二卡合部267b中的圆周方向的中央部。换言之,第二抵接部88b在一对第二靴引导部88a之间形成于第二卡合部267b。如图8所示,第二抵接部88b与制动靴64的被卡合部65d抵接,沿半径方向按压制动靴64。由此将制动靴64定位在非制动位置。
如图9至图12所示,定位凸部69b形成于主体部67a的内周部。具体来说,定位凸部69b从主体部67a的内周部向内侧突出,并一体地形成于主体部67a。定位凸部69b的前端部与形成于凸台部62a的三个定位凹部69a中的任一个卡合。由此将选择固定部件67相对于旋转部件62定位。这样,由选择固定部件67的定位凸部69b和旋转部件62的定位凹部69a构成定位结构69。
如图12所示,支撑部67c形成于主体部67a的内周部。具体来说,支撑部67c从主体部67a的内周部向内侧突出,并一体地形成于主体部67a。如图9至图11所示,支撑部67c的前端部与凸台部62a的外周部抵接,能够沿着凸台部62a的外周部滑动。这里,多个(两个)支撑部67c一体地形成于主体部67a。利用该支撑部67c能够使主体部67a稳定地旋转。另外,利用该支撑部67c能够限制主体部67a的向内侧的变形。
3-5. 移动机构
移动机构68能够使制动靴64和制动鼓66沿着卷筒轴20的轴向相对移动且能够对制动靴64和制动鼓66进行定位。如图3至图6所示,移动机构68具有:操作部件60;制动凸轮71(参照图4);第一齿轮部件73(参照图6);和与第一齿轮部件73啮合的第二齿轮部件74。
操作部件60是例如合成树脂制的圆形的旋钮,通过形成于第1侧盖16a的开口部16c从第1侧盖16a露出到外部。操作部件60由拧入轴支承部35的底部35c的外侧面中的螺纹轴78支承为转动自如。操作部件60通过定位机构76以多个阶段(例如40个阶段左右)定位。第1齿轮部件73与操作部件60一体形成。第2齿轮部件74以能够一体转动的方式与制动鼓66连结。
如图4所示,制动鼓66经由制动凸轮71与轴支承部35卡合。制动凸轮71以不能旋转的方式固定于轴支承部35的外周面。制动凸轮71具有螺旋状的凸轮槽71a。制动凸轮71(凸轮槽71a)与在制动鼓66的内周面突出地形成的例如多个凸轮突起66c卡合。由此,当操作部件60被向一个方向转动操作时,制动鼓66向接近卷筒14的方向移动,从而制动力逐渐增强。并且,当操作部件向另一个方向被转动操作时,制动鼓66向远离卷筒14的方向移动,制动力逐渐减弱。
4. 卷筒制动装置的动作
4-1. 卷筒制动装置的动作概要
在卷筒制动装置25中,当操作部件60处于操作开始位置时,制动靴64的接触部65f与制动鼓66的锥面66a的小径侧接触。此时,制动靴64的摆动角度变得最小,制动鼓66按压制动靴64的按压力也变得最小。由此,作用于卷筒14的制动力最小。
当操作部件60从操作开始位置被转动操作时,第1齿轮部件73旋转。于是,与第1齿轮部件73啮合的第2齿轮部件74旋转,制动鼓66也转动。于是,制动鼓66经由制动凸轮71向接近卷筒14的方向移动。此时,制动靴64的接触部65f与锥面66a的大径侧接触。随着制动鼓66接近卷筒14,制动靴64的摆动角度逐渐增大。于是,制动鼓66按压制动靴64的按压力逐渐增大。由此,作用于卷筒14的制动力逐渐增大。
并且,当操作部件60被设定于最大制动位置时,制动靴64的摆动角度最大,制动鼓66按压制动靴64的按压力变成最大。由此,作用于卷筒14的制动力变成最大。
另外,在将操作部件60从最大制动位置朝向操作开始位置操作的情况下,与上述相反,制动力逐渐减弱。
4-2. 制动靴的设定和动作
通过选择固定部件67的旋转量(旋转角度)能够分别将六个制动靴64设定为能够摆动状态和不能摆动状态。
如图9所示,在四个卡合部67b(第一卡合部167b和第二卡合部267b)与六个制动靴64(第一制动靴164a、第二制动靴164b以及第三制动靴164c)不卡合的情况下,六个制动靴64能够摆动。
这样,在六个制动靴64为能够摆动状态的情况下,当旋转部件62与卷筒14的旋转联动地旋转时,利用离心力使六个制动靴64摆动。详细来说,当旋转部件62旋转时,六个制动靴64绕摆动轴部63c摆动。于是,各制动靴64的第一端65a的接触部65f与制动鼓66的锥面66a接触,从而对卷筒14的旋转进行制动。
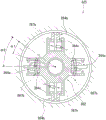
这里,当使用者将选择固定部件67设定在预定的第一旋转角度α1时(参照图10),选择固定部件67的第一卡合部167b与第一制动靴164a卡合。详细来说,第一制动靴164a被形成于选择固定部件67的第一卡合部167b的第一靴引导部87a引导。于是,第一制动靴164a的第二端65b与形成于选择固定部件67的第一卡合部167b的第一抵接部87b抵接。这样,第一制动靴164a通过选择固定部件67的第一卡合部167b而被固定在非制动位置。
在该状态下,两个第一制动靴164a不能摆动,两个第二制动靴164b和两个第三制动靴164c能够摆动。即,当在该状态下旋转部件62旋转时,包含两个第二制动靴164b和两个第三制动靴164c在内的四个制动靴64摆动,从而对卷筒14的旋转进行制动。
这样,通过使用者将选择固定部件67设定在预定的第一旋转角度α1,使制动靴64的状态从六个制动靴64(第一制动靴164a、第二制动靴164b以及第三制动靴164c)能够摆动的状态转移到四个制动靴64(第二制动靴164b、第三制动靴164c)能够摆动的状态(从图9的状态至图10的状态)。
接下来,在旋转部件62为静止的状态下,当使用者将选择固定部件67设定在预定的第二旋转角度α2(>第一旋转角度α1)时(参照图11),选择固定部件67的第二卡合部267b与第二制动靴164b卡合。详细来说,第二制动靴164b被形成于选择固定部件67的第二卡合部267b的第二靴引导部88a引导。于是,第二制动靴164b的第二端65b与形成于选择固定部件67的第二卡合部267b的第二抵接部88b抵接。这样,第二制动靴164b通过选择固定部件67的第二卡合部267b而被固定在非制动位置。
这里,如图11所示,在第二制动靴164b被选择固定部件67的第二卡合部267b固定的状态下,第一制动靴164a也被选择固定部件67的第一卡合部167b固定。即,在该状态下,两个第一制动靴164a和两个第二制动靴164b不能摆动,两个第三制动靴164c能够摆动。当旋转部件62在该状态下旋转时,只有两个第三制动靴164c摆动,来对卷筒14的旋转进行制动。
这样,通过使选择固定部件67旋转,而任意地将第一制动靴164a和第二制动靴164b中的至少任一个选择固定为不能摆动。即,通过选择固定部件67的旋转,能够任意地调整对卷筒14的旋转施加的制动力。
5. 特征
(A1)在本卷筒制动装置25中,通过使选择固定部件67动作,能够选择性地固定制动靴64,使制动靴64在制动位置不能动作。另外,通过使选择固定部件67动作,能够选择性地使制动靴64动作,使制动靴64在非制动位置能够动作。即,在本卷筒制动装置25中,利用选择固定部件67,能够容易地设定制动靴64的能够动作状态和不能动作状态。
具体来说,即使制动靴64的数量增多,仅利用选择固定部件67也能够容易地固定制动靴64。另外,即使制动靴64是小型部件,仅利用选择固定部件67也能够容易地选择制动靴64。另外,通过使选择固定部件67与制动靴64卡合,能够将制动靴64可靠地固定到旋转部件62。
(A2)在本卷筒制动装置25中,通过使选择固定部件67相对于旋转部件62旋转,能够容易地且具有选择性地固定制动靴64。换言之,通过使选择固定部件67相对于旋转部件62旋转,能够容易地解除制动靴64的固定。
(A3)在本卷筒制动装置25中,通过使选择固定部件67的卡合部67b选择性地与第一制动靴164a和第二制动靴164b中的至少任一方卡合,能够容易地使制动靴164a不能动作。另外,通过使选择固定部件67的卡合部67b不与第一制动靴164a和第二制动靴164b中的至少任一方卡合,能够容易地使制动靴64能够动作。
(A4)由于卷筒制动装置25中具有定位结构69,因此利用该定位结构69能够容易地对选择固定部件67进行定位。即,能够可靠地保持使选择固定部件67与制动靴64卡合的状态。
(A5)在本卷筒制动装置25中具有定位结构69。定位结构69具有定位凹部69a和定位凸部69b。通过使定位凸部69b与定位凹部69a卡合,能够容易地对选择固定部件67进行定位。即,能够可靠地保持使选择固定部件67与制动靴64卡合的状态。
(A6)在本卷筒制动装置25中,卡合部67b具有将制动靴64引导到非制动位置的引导部,因此在使选择固定部件67动作的情况下,能够容易地使卡合部67b与制动靴64卡合。
(A7)在本卷筒制动装置25中,当选择固定部件67与第一制动靴164a卡合时,第一制动靴164a固定在非制动位置。另外,当选择固定部件67与第二制动靴164b卡合时,第二制动靴164b固定在非制动位置。进而,当选择固定部件67与第一制动靴164a和第二制动靴164b卡合时,第一制动靴164a和第二制动靴164b固定在非制动位置。即,在这些情况下,制动靴64在非制动位置不能动作。另一方面,不与选择固定部件67卡合的制动靴64在制动位置能够动作。这样,在本卷筒制动装置25中,利用选择固定部件67,能够容易地设定制动靴64的能够动作状态和不能动作状态。
(A8)在本卷筒制动装置25中,通过使卡合部67b(第一卡合部167b、第二卡合部267b)与第一制动靴164a和第二制动靴164b分别卡合,能够容易地使制动靴64不能动作。通过解除卡合部67b(第一卡合部167b、第二卡合部267b)与制动靴64(第一制动靴164a/第二制动靴164b)的卡合,能够容易地使制动靴64能够动作。
(A9)在本卷筒制动装置25中,利用一个卡合部67b(第一卡合部167b),能够将两个制动靴64(第一制动靴164a/第二制动靴164b)同时固定为不能动作。由此,能够根据情况,使两个卡合部67b(第一卡合部167b、第二卡合部267b)与第一制动靴164a和第二制动靴164b分别卡合,或者只利用一个卡合部67b(第一卡合部167b),使第一制动靴164a和第二制动靴164b双方同时卡合。
(A10)在本卷筒制动装置25中,由于第一卡合部167b形成为比第二卡合部267b长,因此,例如在使第一卡合部167b与第一制动靴164a卡合的状态下,即使使选择固定部件67旋转,也能够在维持第一卡合部167b与第一制动靴164a的卡合的状态下,使第二卡合部267b与第二制动靴164b卡合。
6. 其他实施方式
(a1)在上述第一实施方式中,示出了通过使选择固定部件67旋转而将制动靴64固定为不能摆动的情况的示例。取而代之,也可以如以下所示,通过使选择固定部件167在沿着旋转部件62的旋转轴的方向上移动,来将制动靴64固定为不能摆动。
在该情况下,例如如图13所示,选择固定部件167在半径方向上配置于靴安装部62b与凸台部62a之间。在该状态下,选择固定部件167能够在沿着旋转部件62的旋转轴的方向上移动。
具体来说,在使选择固定部件167与连接部62c抵接的状态下(未图示),所有的制动靴64能够摆动。从该状态起,当使选择固定部件167以第一移动量M1在沿着旋转部件62的旋转轴的方向上移动时,如图13所示,第一卡合部167b与第一制动靴164a的被卡合部65d抵接。由此,第一制动靴164a不能摆动。
在该状态下,在选择固定部件167的第二卡合部267b与第一制动靴164a的被卡合部65d之间形成有间隙。因此,第二制动靴164b能够摆动。另外,第三制动靴164c也能够摆动。
进而,从该状态起,当使选择固定部件167以第二移动量M2(>第一移动量M1)在沿着旋转部件62的旋转轴的方向上移动时,第二卡合部267b与第二制动靴164b的被卡合部65d抵接。由此,第二制动靴164b也不能摆动。在该状态下,第三制动靴164c能够摆动。
这样,通过使选择固定部件67移动,而将第一制动靴164a和第二制动靴164b中的至少任一方任意地固定为不能摆动。即,通过选择固定部件67的移动,能够任意地调整对卷筒14的旋转施加的制动力。
(a2)在上述第一实施方式和(a1)的其他实施方式中,示出了利用第一卡合部167b和第二卡合部267b将第一制动靴164a和第二制动靴164b固定为不能摆动的情况的示例。除此之外,也可以在选择固定部件67上形成第三卡合部(未图示),在选择固定部件67的预定旋转量或预定移动量,使第三卡合部与第三制动靴164c卡合。在该结构中,能够将第一制动靴164a、第二制动靴164b以及第三制动靴164c中的至少任一方任意地固定为不能摆动。由此,能够将所有的制动靴固定在非制动位置。另外,这里设定的预定旋转量可以与第一旋转角度α1和/或第二旋转角度α2相同,也可以不同。
<第二实施方式>
第二实施方式的双轴承绕线轮的结构除了第一实施方式中的制动靴64的结构、旋转部件62的结构以及选择固定部件67的结构以外,主要与第一实施方式相同。因此,这里对于与第一实施方式相同的结构省略说明,使用与第一实施方式相同的标记来进行说明。另外,在用于说明第二实施方式的图14和图15中,对于与第一实施方式相同的结构标注相同的标记。另外,这里省略的说明以第一实施方式的说明为准。
1. 卷筒制动机构
卷筒制动装置225是用于利用离心力来对卷筒14进行制动的装置。卷筒制动装置225装配于卷筒轴20和轴支承部35。如图14和图15所示,卷筒制动装置225具有制动鼓66、旋转部件262、多个(例如四个)制动靴264、选择固定部件267以及移动机构68。另外,如上所述,以下对于制动鼓66和移动机构68省略说明。
旋转部件262与卷筒14的线放出方向的旋转例如卷筒14的旋转联动地进行旋转。旋转部件262通过压入等适当的固定手段能够一体旋转地与卷筒轴20连接。
如图14所示,旋转部件262具有:内周部固定在卷筒轴20上的凸台部262a;配置于凸台部262a的径向外侧的靴安装部262b;以及连接凸台部262a和靴安装部262b的连接部262c。
凸台部262a是具有供卷筒轴20贯通的带有阶梯的贯通孔(未图示)的筒状部分。贯通孔被卷筒轴20定位。
靴安装部262b一体地形成于连接部262c的外周部。靴安装部262b具有用于配置制动靴264的凹部89a。在凹部89a中以旋转部件262的旋转轴K2(参照图15)为基准向外侧开口。在凹部89a的底部设置有引导制动靴264的引导轴89b。引导轴89b将制动靴264保持为能够在制动位置与非制动位置之间移动。在凹部89a的壁部设置有彼此对置的一对突出部89c。一对突出部89c在制动位置保持制动靴264。
连接部262c是厚壁圆板状的部件,并一体地形成于凸台部262a的外周部。在连接部262c的外周侧一体地形成有靴安装部262b。
制动靴264支承于旋转部件262,并能够在利用离心力对卷筒14进行制动的制动位置与非制动而允许卷筒14的旋转的非制动位置之间移动。具体来说,制动靴264装配成能够相对于旋转部件262的引导轴89b沿半径方向进退自如。
制动靴264具有主体部364a和设置于主体部364a的边缘部364c。在主体部364a中形成有与制动鼓66接触的接触部265f。另外,在主体部364a中形成有孔部265c。在孔部265c中贯穿插入有靴安装部262b的引导轴89b。
边缘部364c一体地形成于主体部364a的外周部。边缘部364c从主体部364a的外周部向外侧突出。边缘部364c能够沿着靴安装部262b的凹部89a的壁部移动。边缘部364c能够与靴安装部262b的突出部89c抵接。
制动靴264以能够移动状态和不能移动状态中的任一状态配置于引导轴89b。在能够移动状态下,制动靴264能够利用离心力对卷筒14进行制动。在该情况下,当离心力作用于制动靴264时,制动靴264沿引导轴89b向半径方向外侧移动。于是,制动靴264的边缘部364c与靴安装部262b的突出部89c抵接,从而将制动靴264配置在制动位置。由此,制动靴264的主体部364a与制动鼓66的内周面抵接,从而对卷筒14进行制动。
另一方面,在不能移动状态下,制动靴264不对卷筒14进行制动(非制动)而允许卷筒14的旋转。通过选择固定部件267与制动靴264卡合来实现不能移动状态。在该情况下,当离心力作用于制动靴264时,制动靴264的边缘部364c与选择固定部件267的卡合部367b(后述)卡合。在该状态下,制动靴264不能沿引导轴89b移动。该状态为制动靴264配置在非制动位置的状态。即,制动靴264的主体部364a不能与制动鼓66的内周面抵接,卷筒14是非制动的。
具有上述结构的制动靴264具有第一制动靴264a和第二制动靴264b。以两个第一制动靴264a沿半径方向彼此对置的方式,将各第一制动靴264a装配于靴安装部262b的引导轴89b。另外,以两个第二制动靴264b沿半径方向彼此对置的方式,将各第二制动靴264b装配于靴安装部262b的引导轴89b。另外,第一制动靴264a和第二制动靴264b沿周向(旋转方向)隔开预定间隔地配置。更具体来说,第一制动靴264a与第二制动靴264b以绕旋转轴K2彼此隔开90度间隔的方式配置。
选择固定部件267装配于旋转部件262。选择固定部件267相对于旋转部件262装配成能够在沿着旋转部件262的旋转轴K2的方向上移动。选择固定部件267能够选择性地与制动靴264卡合。由此,选择固定部件267能够将制动靴264选择性地固定在非制动位置。例如,选择固定部件267选择性地与第一制动靴264a和第二制动靴264b中的至少任一方卡合。
如图15所示,选择固定部件267具有主体部267a和卡合部367b。主体部267a能够相对于旋转部件262移动。主体部267a形成为圆环状。卡合部367b设置于主体部267a。详细来说,多个(例如四组)卡合部367b彼此隔开间隔地从主体部267a向外侧突出且一体形成。卡合部367b能够选择性地与第一制动靴264a和第二制动靴264b中的至少任一方卡合。卡合部367b根据主体部267a相对于旋转部件262的移动量,选择性地与第一制动靴264a和第二制动靴264b中的至少任一方卡合。
具体来说,将四组卡合部367b中沿径向彼此对置的两组卡合部367b分别记为第一卡合部467b和第二卡合部567b。一对第一卡合部467b和一对第二卡合部567b形成为棒状。一对第一卡合部467b和一对第二卡合部567b一体地形成于主体部267a。在沿着旋转部件262的旋转轴K2的方向上,一对第一卡合部467b比一对第二卡合部567b长。由此,在选择固定部件267以预定的第一移动量移动了的情况下,一对第一卡合部467b与第一制动靴264a的边缘部364c卡合。另外,在选择固定部件267以预定的第二移动量移动了的情况下,一对第二卡合部567b在预定的第二移动量中与第二制动靴264b的边缘部364c卡合。
2. 制动靴的设定和动作
根据选择固定部件267相对于旋转部件262的移动量,能够将四个制动靴264分别设定为能够移动状态和不能移动状态。
在四个制动靴264是能够移动状态的情况下,当旋转部件262与卷筒14的旋转联动地旋转时,四个制动靴264利用离心力而向半径方向外侧移动。详细来说,当旋转部件262旋转时,四个制动靴264沿着引导轴89向半径方向外侧移动。于是,各制动靴264的接触部265f与制动鼓66的内周面接触,从而对卷筒14的旋转进行制动。
这里,在旋转部件262静止的状态下,使用者朝向旋转部件262压入选择固定部件267,由此当将选择固定部件267设定为预定的第一移动量时,如图14所示,选择固定部件267的第一卡合部467b与第一制动靴264a卡合。详细来说,选择固定部件267的第一卡合部467b与第一制动靴264a的边缘部364c卡合。换言之,第一制动靴264a的边缘部364c配置于第一卡合部467b与靴安装部262b的凹部的底部之间。由此,第一制动靴264a通过选择固定部件267的第一卡合部467b而固定在非制动位置。在该状态下,两个第一制动靴264a不能移动,两个第二制动靴264b能够移动。即,当在该状态下旋转部件262旋转时,两个第二制动靴264b向半径方向外侧移动,从而对卷筒14的旋转进行制动。
接下来,在旋转部件262静止的状态下,使用者朝向旋转部件262进一步压入选择固定部件267,由此,当将选择固定部件267设定为预定的第二移动量(>第一移动量)时,选择固定部件267的第二卡合部567b与第二制动靴264b卡合。
详细来说,选择固定部件267的第二卡合部567b与第二制动靴264b的边缘部364c卡合。换言之,第二制动靴264b的边缘部364c配置于第二卡合部567b与靴安装部262b的凹部的底部之间。由此,第二制动靴264b通过选择固定部件267的第二卡合部567b而固定在非制动位置。在该状态下,所有的制动靴264(两个第一制动靴264a和两个第二制动靴264b)都不能移动。即,在该状态下即使旋转部件262旋转,也不会对卷筒14的旋转进行制动。
这样,通过使选择固定部件267移动,而将第一制动靴264a和/或第二制动靴264b任意地固定为不能摆动。即,通过选择固定部件267的移动,能够容易地调整对卷筒14的旋转施加的制动力。
3. 特征
(B1)在本卷筒制动装置225中,通过使选择固定部件267在沿着旋转部件262的旋转轴的方向上移动,能够容易地选择性地固定制动靴264。换言之,通过使选择固定部件267相对于旋转部件262在沿着上述旋转轴K2的方向上移动,能够容易地解除制动靴264的固定。
(B2)在本卷筒制动装置225中,卡合部467b、567b根据相对于旋转部件262的移动量,而能够选择性地与第一制动靴264a和第二制动靴264b中的至少任一方卡合。因此,例如在预定的第一移动量的情况下,能够使卡合部467b、567b与第一制动靴264a和第二制动靴264b中的任一方卡合。另外,在预定的第二移动量的情况下,能够使卡合部467b、567b同时与第一制动靴264a和第二制动靴264b双方卡合。这样,通过使选择固定部件267相对于旋转部件262移动,能够容易地选择性地固定制动靴264。换言之,通过使选择固定部件267相对于旋转部件262移动,能够容易地解除制动靴264的固定。
(B)在本卷筒制动装置225中,由于第一卡合部467b形成得比第二卡合部567b长,因此,例如在使第一卡合部467b与第一制动靴264a卡合的状态下,即使使选择固定部件267进行了移动,在维持第一卡合部467b与第一制动靴264a的卡合的状态下,也能够使第二卡合部567b与第二制动靴264b卡合。
4. 其他实施方式
(b1)在上述第二实施方式中,示出了利用四组卡合部(第一卡合部467b和第二卡合部567b)在两个阶段将四个制动靴(第一制动靴264a和第二制动靴264b)固定为不能移动的情况的示例。取而代之,也可以分别利用四组卡合部467b、567b在四个阶段将四个制动靴264a、264b固定为不能移动。例如,通过将四组卡合部467b、567b各自的长度设定为彼此不同的长度,能够在四个阶段将四个制动靴264a、264b固定为不能移动。由此,能够更精细地对卷筒14的旋转进行制动。
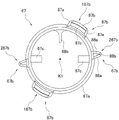
(b2)在上述第二实施方式中,示出了通过使选择固定部件267在沿着旋转部件262的旋转轴的方向上移动而使选择固定部件267的卡合部467b、567b与制动靴264的边缘部364c卡合的情况的示例。取而代之,也可以通过使选择固定部件367绕旋转部件362的旋转轴K2旋转,如图16和图17所示,而使选择固定部件367的卡合部667b、767b与制动靴264的边缘部364c卡合。
在该情况下,卷筒制动装置325的选择固定部件367具有主体部367a和卡合部667b、767b。主体部367a能够相对于旋转部件362移动。主体部367a形成为圆环状。多个(例如四个)卡合部667b、767b彼此隔开间隔地从主体部367a向外侧突出且一体地形成。卡合部667b、767b能够根据主体部367a相对于旋转部件362的旋转量而选择性地与第一制动靴264a和第二制动靴264b中的至少任一方卡合。
在图17中,在四个卡合部667b、767b中,将沿径向彼此对置的两组卡合部分别记为第一卡合部667b和第二卡合部767b。一对第一卡合部667b和一对第二卡合部767b从主体部367a突出并一体地形成于主体部367a。在旋转部件262的旋转方向上,一对第一卡合部667b比一对第二卡合部767b长。由此,如图16所示,当将选择固定部件367设定为第一旋转角度α1时,一对第一卡合部667b与第一制动靴264a的边缘部364c卡合。另外,当将选择固定部件367设定为第二旋转角度α2时,在一对第一卡合部667b与第一制动靴264a的边缘部364c卡合的状态下,一对第二卡合部767b与第二制动靴264b的边缘部364c卡合。
即使这样构成,也能够利用选择固定部件367,根据选择固定部件367的旋转量,将第一制动靴264a和第二制动靴264b中的至少任一方选择性地卡合。
工业实用性
本发明能够广泛地应用于双轴承绕线轮的卷筒制动装置。
Claims (9)
1.一种双轴承绕线轮的卷筒制动装置,利用离心力来对旋转自如地装配在绕线轮主体上的卷筒进行制动,其特征在于,
所述双轴承绕线轮的卷筒制动装置包括:
旋转部件,与上述卷筒的旋转联动地旋转;
制动靴,支承于上述旋转部件,且能够在利用上述离心力对上述卷筒进行制动的制动位置与不制动而允许上述卷筒的旋转的非制动位置之间移动;
制动鼓,能够与上述制动靴接触;以及
选择固定部件,装配于上述旋转部件,通过选择性地与上述制动靴卡合来将上述制动靴选择性地固定在上述非制动位置,
上述选择固定部件相对于上述旋转部件装配成能够旋转,在前述选择固定部件直接按压上述制动靴的状态下将上述制动靴固定在上述非制动位置上,
上述双轴承绕线轮的卷筒制动装置还具有用于将上述选择固定部件相对于上述旋转部件定位的定位结构。
2.根据权利要求1所述的双轴承绕线轮的卷筒制动装置,其特征在于,
上述选择固定部件具有:装配于上述旋转部件的主体部;和设置于上述主体部且能够选择性地与上述制动靴卡合的卡合部。
3.根据权利要求1所述的双轴承绕线轮的卷筒制动装置,其特征在于,
上述定位结构具有:设置于上述旋转部件和上述选择固定部件中的任意一方的定位凹部;和设置于上述旋转部件和上述选择固定部件中的任意另一方且与上述定位凹部卡合的定位凸部。
4.根据权利要求1或2所述的双轴承绕线轮的卷筒制动装置,其特征在于,
上述选择固定部件具有将上述制动靴引导至上述非制动位置的引导部。
5.根据权利要求2所述的双轴承绕线轮的卷筒制动装置,其特征在于,
上述制动靴具有第一制动靴和第二制动靴,
上述选择固定部件选择性地与上述第一制动靴和第二制动靴中的至少任一方卡合。
6.根据权利要求5所述的双轴承绕线轮的卷筒制动装置,其特征在于,
上述卡合部由第一卡合部和第二卡合部构成,
上述第一卡合部能够与上述第一制动靴和第二制动靴中的至少任一方卡合,
上述第二卡合部能够与上述第一制动靴和第二制动靴中的至少任意另一方卡合。
7.根据权利要求6所述的双轴承绕线轮的卷筒制动装置,其特征在于,
上述第一卡合部能够与上述第一制动靴和第二制动靴双方卡合。
8.根据权利要求6或7所述的双轴承绕线轮的卷筒制动装置,其特征在于,
在上述旋转部件旋转的方向上,上述第一卡合部比上述第二卡合部长。
9.根据权利要求6或7所述的双轴承绕线轮的卷筒制动装置,其特征在于,
在沿着上述旋转部件的旋转轴的方向上,上述第一卡合部比上述第二卡合部长。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013-100113 | 2013-05-10 | ||
| JP2013100113A JP6284306B2 (ja) | 2013-05-10 | 2013-05-10 | 両軸受リールのスプール制動装置 |
| CN201410193988.8A CN104137816B (zh) | 2013-05-10 | 2014-05-09 | 双轴承绕线轮的卷筒制动装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201410193988.8A Division CN104137816B (zh) | 2013-05-10 | 2014-05-09 | 双轴承绕线轮的卷筒制动装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108338134A CN108338134A (zh) | 2018-07-31 |
| CN108338134B true CN108338134B (zh) | 2021-03-12 |
Family
ID=51847300
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201410193988.8A Active CN104137816B (zh) | 2013-05-10 | 2014-05-09 | 双轴承绕线轮的卷筒制动装置 |
| CN201810199885.0A Active CN108338134B (zh) | 2013-05-10 | 2014-05-09 | 双轴承绕线轮的卷筒制动装置 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201410193988.8A Active CN104137816B (zh) | 2013-05-10 | 2014-05-09 | 双轴承绕线轮的卷筒制动装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9282731B2 (zh) |
| JP (1) | JP6284306B2 (zh) |
| KR (1) | KR102146085B1 (zh) |
| CN (2) | CN104137816B (zh) |
| MY (1) | MY181326A (zh) |
| TW (1) | TWI613141B (zh) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6295033B2 (ja) * | 2013-06-25 | 2018-03-14 | 株式会社シマノ | 両軸受リールのスプール制動装置及び両軸受リール |
| JP6514021B2 (ja) * | 2015-04-27 | 2019-05-15 | 株式会社シマノ | 両軸受リールのスプール制動装置 |
| KR101744597B1 (ko) * | 2015-11-23 | 2017-06-20 | 주식회사 코커스 | 낚시용 릴 |
| JP6655402B2 (ja) * | 2016-01-22 | 2020-02-26 | 株式会社シマノ | 両軸受リールのスプール制動装置 |
| JP6836404B2 (ja) * | 2017-01-19 | 2021-03-03 | 株式会社シマノ | スプール制動装置 |
| JP1638350S (zh) * | 2019-02-12 | 2019-08-05 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2290662A (en) * | 1939-10-30 | 1942-07-21 | Edward G Willison | Fishing reel |
| SE432512B (sv) * | 1980-03-18 | 1984-04-09 | Abu Ab | Centrifugalbromsanordning vid fiskerulle |
| JP3159625B2 (ja) * | 1995-05-24 | 2001-04-23 | ダイワ精工株式会社 | 魚釣用リールの制動装置 |
| JP3509535B2 (ja) * | 1998-03-10 | 2004-03-22 | ダイワ精工株式会社 | 魚釣用両軸受型リール |
| JP2000279075A (ja) * | 1999-03-30 | 2000-10-10 | Shimano Inc | 釣り用リール |
| JP2001057832A (ja) * | 1999-06-16 | 2001-03-06 | Ryobi Ltd | 両軸受けリールの制動装置 |
| JP2001069888A (ja) * | 1999-06-30 | 2001-03-21 | Ryobi Ltd | 両軸受けリールの制動装置 |
| TW462872B (en) * | 1999-07-26 | 2001-11-11 | Shimano Kk | Centrifugal braking apparatus of double-bearing reel |
| JP4313902B2 (ja) * | 1999-08-04 | 2009-08-12 | 株式会社シマノ | 両軸受リールの遠心制動装置 |
| TWI298621B (en) * | 2003-01-06 | 2008-07-11 | Shimano Kk | Braking device for a dual bearing reel |
| JP2006254762A (ja) * | 2005-03-16 | 2006-09-28 | Daiwa Seiko Inc | 魚釣用リール |
| KR100702066B1 (ko) * | 2005-04-28 | 2007-03-30 | 연 석 노 | 베이트 캐스트 릴 |
| CN201099782Y (zh) * | 2007-08-10 | 2008-08-13 | 王妙玉 | 一种半自动晾杆手摇器 |
| JP5122273B2 (ja) * | 2007-12-28 | 2013-01-16 | 株式会社シマノ | 両軸受リールのスプール制動装置 |
| KR101063439B1 (ko) * | 2008-07-03 | 2011-09-08 | 주식회사 바낙스 | 베이트 캐스트 릴의 원심 브레이크장치 |
| JP5159479B2 (ja) * | 2008-07-08 | 2013-03-06 | 株式会社シマノ | 両軸受リールのドラグ機構 |
| JP5349349B2 (ja) * | 2010-01-25 | 2013-11-20 | 株式会社シマノ | 両軸受リールのドラグ発音装置 |
| US8746604B2 (en) * | 2011-03-04 | 2014-06-10 | Shimano Inc. | Fishing reel |
| JP5718119B2 (ja) * | 2011-03-29 | 2015-05-13 | 株式会社シマノ | 両軸受リールの遠心制動装置 |
| JP5871493B2 (ja) | 2011-06-20 | 2016-03-01 | 株式会社シマノ | 両軸受リールのスプール制動装置 |
| JP5878718B2 (ja) * | 2011-09-27 | 2016-03-08 | 株式会社シマノ | 両軸受リール |
| JP5926564B2 (ja) * | 2012-01-18 | 2016-05-25 | 株式会社シマノ | 両軸受リールのスプール制動装置及び両軸受リール |
| CN202643003U (zh) * | 2012-04-18 | 2013-01-02 | 郑碧绿 | 自动卷管器 |
-
2013
- 2013-05-10 JP JP2013100113A patent/JP6284306B2/ja active Active
-
2014
- 2014-02-19 KR KR1020140018970A patent/KR102146085B1/ko active IP Right Grant
- 2014-03-05 TW TW103107534A patent/TWI613141B/zh active
- 2014-04-04 US US14/245,148 patent/US9282731B2/en active Active
- 2014-04-16 MY MYPI2014700928A patent/MY181326A/en unknown
- 2014-05-09 CN CN201410193988.8A patent/CN104137816B/zh active Active
- 2014-05-09 CN CN201810199885.0A patent/CN108338134B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| TW201442935A (zh) | 2014-11-16 |
| MY181326A (en) | 2020-12-21 |
| KR102146085B1 (ko) | 2020-08-19 |
| CN104137816B (zh) | 2018-05-22 |
| KR20140133414A (ko) | 2014-11-19 |
| TWI613141B (zh) | 2018-02-01 |
| US20140332616A1 (en) | 2014-11-13 |
| US9282731B2 (en) | 2016-03-15 |
| CN108338134A (zh) | 2018-07-31 |
| CN104137816A (zh) | 2014-11-12 |
| JP2014217341A (ja) | 2014-11-20 |
| JP6284306B2 (ja) | 2018-02-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108338134B (zh) | 双轴承绕线轮的卷筒制动装置 | |
| US9253969B2 (en) | Dual-bearing reel spool braking device and dual-bearing reel | |
| JP6166558B2 (ja) | 両軸受リール | |
| KR100616144B1 (ko) | 양 베어링 릴의 원심제동장치 | |
| JP2014176360A5 (zh) | ||
| JP2014176301A5 (zh) | ||
| JP2014217341A5 (zh) | ||
| JP2000316438A (ja) | 両軸受リールの制動装置 | |
| KR102583872B1 (ko) | 양 베어링 릴의 스풀 제동 장치 | |
| US9545089B2 (en) | Dual-bearing reel spool braking device and a dual-bearing reel | |
| KR100671948B1 (ko) | 양 베어링 릴의 제동장치 | |
| JP2016202123A5 (zh) | ||
| JP6267874B2 (ja) | 両軸受リールのスプール制動装置 | |
| JP6209310B2 (ja) | 両軸受リール及びその駆動軸 | |
| US6409112B1 (en) | Dual-bearing reel having control knob for adjusting braking force | |
| JP2013146202A5 (zh) | ||
| JP4928522B2 (ja) | 魚釣用スピニングリール | |
| JP4870106B2 (ja) | 魚釣用スピニングリール | |
| JP2009195165A (ja) | 魚釣用スピニングリール |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |