CN107533498B - 车辆控制装置 - Google Patents
车辆控制装置 Download PDFInfo
- Publication number
- CN107533498B CN107533498B CN201680025163.2A CN201680025163A CN107533498B CN 107533498 B CN107533498 B CN 107533498B CN 201680025163 A CN201680025163 A CN 201680025163A CN 107533498 B CN107533498 B CN 107533498B
- Authority
- CN
- China
- Prior art keywords
- control
- travel
- mode
- vehicle
- control mode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007704 transition Effects 0.000 claims abstract description 21
- 238000012544 monitoring process Methods 0.000 claims description 5
- 230000002159 abnormal effect Effects 0.000 claims 1
- 230000001052 transient effect Effects 0.000 abstract description 6
- 238000010586 diagram Methods 0.000 description 24
- 238000000034 method Methods 0.000 description 20
- 238000011084 recovery Methods 0.000 description 19
- 238000012545 processing Methods 0.000 description 16
- 230000015556 catabolic process Effects 0.000 description 15
- 238000006731 degradation reaction Methods 0.000 description 15
- 230000008569 process Effects 0.000 description 15
- 230000006870 function Effects 0.000 description 13
- 230000008859 change Effects 0.000 description 7
- 238000012805 post-processing Methods 0.000 description 4
- 230000000737 periodic effect Effects 0.000 description 3
- 239000013589 supplement Substances 0.000 description 3
- 230000007850 degeneration Effects 0.000 description 2
- 230000001771 impaired effect Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- JJWKPURADFRFRB-UHFFFAOYSA-N carbonyl sulfide Chemical compound O=C=S JJWKPURADFRFRB-UHFFFAOYSA-N 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000004092 self-diagnosis Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0055—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots with safety arrangements
- G05D1/0066—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots with safety arrangements for limitation of acceleration or stress
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/0703—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation
- G06F11/0706—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation the processing taking place on a specific hardware platform or in a specific software environment
- G06F11/0721—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation the processing taking place on a specific hardware platform or in a specific software environment within a central processing unit [CPU]
- G06F11/0724—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation the processing taking place on a specific hardware platform or in a specific software environment within a central processing unit [CPU] in a multiprocessor or a multi-core unit
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/0703—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation
- G06F11/0706—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation the processing taking place on a specific hardware platform or in a specific software environment
- G06F11/0736—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation the processing taking place on a specific hardware platform or in a specific software environment in functional embedded systems, i.e. in a data processing system designed as a combination of hardware and software dedicated to performing a certain function
- G06F11/0739—Error or fault processing not based on redundancy, i.e. by taking additional measures to deal with the error or fault not making use of redundancy in operation, in hardware, or in data representation the processing taking place on a specific hardware platform or in a specific software environment in functional embedded systems, i.e. in a data processing system designed as a combination of hardware and software dedicated to performing a certain function in a data processing system embedded in automotive or aircraft systems
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/16—Error detection or correction of the data by redundancy in hardware
- G06F11/20—Error detection or correction of the data by redundancy in hardware using active fault-masking, e.g. by switching out faulty elements or by switching in spare elements
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/07—Responding to the occurrence of a fault, e.g. fault tolerance
- G06F11/16—Error detection or correction of the data by redundancy in hardware
- G06F11/20—Error detection or correction of the data by redundancy in hardware using active fault-masking, e.g. by switching out faulty elements or by switching in spare elements
- G06F11/202—Error detection or correction of the data by redundancy in hardware using active fault-masking, e.g. by switching out faulty elements or by switching in spare elements where processing functionality is redundant
- G06F11/2023—Failover techniques
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/30—Monitoring
- G06F11/3003—Monitoring arrangements specially adapted to the computing system or computing system component being monitored
- G06F11/3013—Monitoring arrangements specially adapted to the computing system or computing system component being monitored where the computing system is an embedded system, i.e. a combination of hardware and software dedicated to perform a certain function in mobile devices, printers, automotive or aircraft systems
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/30—Monitoring
- G06F11/3003—Monitoring arrangements specially adapted to the computing system or computing system component being monitored
- G06F11/302—Monitoring arrangements specially adapted to the computing system or computing system component being monitored where the computing system component is a software system
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/30—Monitoring
- G06F11/34—Recording or statistical evaluation of computer activity, e.g. of down time, of input/output operation ; Recording or statistical evaluation of user activity, e.g. usability assessment
- G06F11/3466—Performance evaluation by tracing or monitoring
- G06F11/3495—Performance evaluation by tracing or monitoring for systems
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/08—Registering or indicating performance data other than driving, working, idle, or waiting time, with or without registering driving, working, idle or waiting time
- G07C5/0808—Diagnosing performance data
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Quality & Reliability (AREA)
- Computing Systems (AREA)
- Mathematical Physics (AREA)
- Computer Hardware Design (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Hardware Redundancy (AREA)
Abstract
提供一种车辆控制装置,能够缓和在修复故障、使系统复原成正常的状态之际产生的控制段差、向使用者提供流畅的驾驶性。本发明的车辆控制装置具有第1行驶控制模式和第2行驶控制模式,在从所述第2行驶控制模式向所述第1行驶控制模式迁移期间的过渡状态下,对所述第1行驶控制模式下的第1控制参数进行运算并进行检查,并且,对所述第2行驶控制模式下的第2控制参数进行运算而用于行驶控制。
Description
技术领域
本发明涉及一种车辆控制装置。
背景技术
在汽车、电梯、建筑机械等电气设备中,使用了利用所谓的嵌入式软件对控制对象进行控制的嵌入控制装置。与以往的由机械的机构、电路进行的控制方式相比,嵌入式软件存在能够实现灵活且高级的控制的优点。
在嵌入控制装置(例如车辆控制装置)中,以降低车载空间、制造成本为目的,以往进行了将搭载于各ECU(电子控制单元,Electronic Control Unit)的功能汇集于1个ECU的ECU的集成化。在进行ECU集成化的过程中,需要在同一ECU上处理多个功能。因此,在车辆控制装置中,开始灵活运用多核处理器。
多核处理器不仅能够使用多个核心并行实施各处理,而且能够在一部分核心发生了故障的情况下,以其他核心代替处理被分配到该一部分核心的应用软件。由此,能够谋求系统的冗余化,使安全性提高。
下述专利文献1记载有如下的结构例:在多核处理器中的一部分核心发生了故障的情况下,使用正常发挥功能的核心来实施发生了故障的核心的恢复处理,从而不使系统整体停止或重新起动,就使全部的核心复原成正常的状态。
现有技术文献
专利文献
专利文献1:日本特开2010-020621号公报
发明内容
发明要解决的课题
在汽车等嵌入控制装置中使用了专利文献1所记载的技术的情况下,发生了故障的核心正在运算处理的程序中的历史数据损失,在该核心恢复正常状态前后存在产生较大的控制段差的可能性。程序中的历史数据是指,例如基于积分器、微分器的运算结果、系统内部的状态量等持续被更新的数据。
更具体而言,在汽车的行驶控制中检测到多核处理器的一部分核心发生了故障的情况下,即使使用专利文献1所记载的技术而使发生了故障的核心恢复,使系统复原成正常状态,程序中的历史数据也损失,因此,存在产生控制的不连续点、有损驾驶的舒适度的可能性。
本发明是鉴于上述问题而做成的,目的在于提供一种能够缓和在修复故障、使系统复原成正常状态之际所产生的控制段差、向使用者提供流畅的驾驶性的车辆控制装置。
用于解决课题的手段
本发明的车辆控制装置具有第1行驶控制模式和第2行驶控制模式,在从所述第2行驶控制模式向所述第1行驶控制模式迁移期间的过渡状态下,对所述第1行驶控制模式下的第1控制参数进行运算并进行检查,并且,对所述第2行驶控制模式下的第2控制参数进行运算并用于行驶控制。
发明效果
根据本发明的车辆控制装置,能够缓和控制段差而向使用者提供流畅的驾驶性。
附图说明
图1是实施方式1的车辆控制装置1的系统构成图。
图2是表示现有技术中车辆控制装置的动作的状态迁移图。
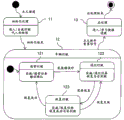
图3是表示实施方式1的车辆控制装置1的动作的状态迁移图。
图4是表示车辆控制装置1实施通常行驶模式121的状态的图。
图5是表示车辆控制装置1实施退化行驶模式122的状态的图。
图6是表示车辆控制装置1实施恢复行驶模式123的状态的图。
图7是说明车辆控制装置1实施恢复行驶模式123的顺序的流程图。
图8是表示现有技术中车辆控制装置的输出值的经时变化的图。
图9是表示车辆控制装置1经由输入输出部140输出的输出值的经时变化的图。
图10是表示车辆控制装置1的消耗电力的经时变化的图。
图11是实施方式2的车辆控制装置1的系统构成图。
图12是实施方式3的车辆控制装置1的系统构成图。
图13是表示实施方式4的车辆控制装置1的动作的状态迁移图。
具体实施方式
<实施方式1>
图1是本发明的实施方式1的车辆控制装置1的系统构成图。车辆控制装置1是对车辆的动作进行控制的装置。车辆控制装置1具备处理器110、通常控制程序120、退化控制程序130、以及输入输出部140。处理器110是多核处理器,具备核心(core)A111和核心B112。
核心A111执行通常控制程序120,核心B112执行退化控制程序130。输入输出部140从配置于车辆控制装置1的外部的传感器等接收信号并过渡给处理器110,且从处理器110接收控制信号并输出给控制对象。
通常控制程序120是安装有在车辆通常行驶时处理器110应实施的控制处理的程序。退化控制程序130是安装有在车辆退化行驶时处理器110应实施的控制处理的程序。退化行驶是指,因在通常行驶中发现了错误等为原因而以使该车辆的功能退化后的状态行驶。
图2是表示现有技术中的车辆控制装置的动作的状态迁移图。一般而言,车辆按照由车辆控制装置输出的输出值对电动机等致动器进行操作来行驶。若点火(ignition)被接通(ON),则车辆控制装置向初始化处理模式11迁移。
在初始化处理模式11中,车辆控制装置开始进行自我诊断,实施向预定的变量代入初始值等的初始化处理。若这些初始化理结束,则车辆控制装置向车辆行驶模式12迁移,车辆成为实际能够行驶的状态。
若向车辆行驶模式12迁移,则车辆控制装置首先成为通常行驶模式121状态。在通常行驶模式121下,车辆控制装置实施如下等处理:(a)每隔固定周期执行运算处理的周期任务;(b)在发动机旋转等定时执行运算处理的非周期任务;(c)对车辆控制装置的错误产生进行监视的错误确认。各任务包括运算用于使车辆在通常行驶模式121下动作的控制参数的处理。在通常行驶模式121下发现了错误的情况下,车辆控制装置向退化行驶模式122迁移。这里的错误是指,若继续通常行驶,则对使用者来说产生危险的可能性达到一定程度的状态。
退化行驶模式122是ISO26262等安全标准所要求的安全机制。在退化行驶模式122下,即使车辆控制装置的错误被确认的情况下,车辆控制装置不会使控制功能突然停止而对必要最低限的功能进行持续运算处理,从而持续控制车辆。在退化行驶模式122下,车辆控制装置实施用于实施退化行驶的周期/非周期任务。各任务包括运算用于使车辆在退化行驶模式122下动作的控制参数的处理。
在车辆行驶模式12的状态下在点火被断开(OFF)的情况下,或者,在车辆行驶模式12的状态下发布了重置车辆控制装置的信号的情况下,车辆控制装置向后处理模式13迁移。
在后处理模式13下,车辆控制装置使下次点火接通时需要的学习数据向非易失性存储器退避。若后处理完成,则车辆控制装置将功能停止,与此同时车辆也停止。
车辆控制装置通过实施上述的状态迁移,实现了车辆的行驶。在通常行驶模式121下发现了错误而向退化行驶模式122迁移了的情况下,为了再次向通常行驶模式121迁移,使点火断开、或发布重置信号等,而需要重新启动车辆控制装置的系统整体。因而,在重新起动的前后控制参数断续地变化,存在妨碍实现流畅的驾驶性的可能性。
图3是表示本实施方式1的车辆控制装置1的动作的状态迁移图。在图3中,与图2相比较,新设有恢复行驶模式123。在图2中,为了从退化行驶模式122返回至通常行驶模式,需要点火断开等,而在本实施方式中,从退化行驶模式122经由恢复行驶模式123返回至通常行驶模式121,由此不使控制参数断续,就顺利地实现返回至通常状态。
在本实施方式1的退化行驶模式122中,车辆控制装置1判断是否需要向恢复行驶模式123迁移,因此实施恢复与否判断。作为判断恢复与否的契机,存在各种契机,例如列举了向退化行驶模式122迁移后经过预定时间等,但并不限定于此。
在恢复行驶模式123下,车辆控制装置1实施用于实施恢复行驶的周期/非周期任务。并且,在恢复行驶模式123下,实施判断使车辆向通常行驶模式121迁移还是向退化行驶模式122返回的恢复成功与否判断。随后论述恢复成功与否判断的详细情况。具有恢复行驶模式123,由此即使车辆控制装置1检测到错误的情况下,也可以不重新起动车辆整体,就能够向通常行驶模式121恢复。
图4是表示车辆控制装置1实施通常行驶模式121的状态的图。在通常行驶模式121下,核心A111执行通常控制程序120,将其输出值用作控制参数的控制信号经由输入输出部140输出,来对车辆进行控制。通常控制程序120是安装有通常行驶模式121下的通常任务和错误确认处理的控制程序。核心A111也可以同时执行通常控制程序120以外的处理。
图5是表示车辆控制装置1实施退化行驶模式122的状态的图。退化行驶模式122例如在核心A111产生故障、核心A111不可能执行通常控制程序120时被执行。核心B112执行退化控制程序130来作为通常控制程序120的代替,将其输出值用作控制参数的控制信号经由输入输出部140输出,来对车辆进行控制。退化控制程序130安装有退化行驶模式122下的退化任务和恢复与否判断处理。核心B112也可以同时执行退化控制程序130以外的处理。
图6是表示车辆控制装置1实施恢复行驶模式123的状态的图。在恢复行驶模式123下,核心A111(检测有故障)执行通常控制程序120,与此并行地核心B112执行退化控制程序130。
在恢复行驶模式123下,处理器110为了确保安全,核心A111的输出值不用于车辆控制,将核心B112所执行的退化控制程序130的输出值用作控制参数来控制车辆。不过,执行通常控制程序120且对控制参数进行运算并进行检查,从而能够判定在通常行驶模式121下发现的错误是否是过渡性的错误。
在恢复行驶模式123下,在通常行驶模式121下发现的错误再现的情况下,设想为不是瞬时错误而产生了电路短路等永久故障,在恢复成功与否判断处理中判断为恢复失败而向退化行驶模式122返回。在通常行驶模式121下发现的错误没有再现的情况下,设想为产生了因宇宙线等的过渡故障,在恢复成功与否判断处理中判断为恢复成功而能够向通常行驶模式121迁移。
图7是说明车辆控制装置1实施恢复行驶模式123的顺序的流程图。以下,对图7的各步骤进行说明。
(图7:步骤S12301~S12302)
处理器110在通常行驶模式121下仅重新启动检测到错误的核心A111(S12301)。核心A111执行通常控制程序120(S12302)。但是,如之前说明的那样,通过执行通常控制程序120获得的输出值不用于车辆控制。
(图7:步骤S12303)
处理器110确认核心A111执行的通常控制程序120的输出值是否正常。例如,预先定义通常控制程序120运算的控制参数能取得的上下限值,考虑若输出值是预定时间以上且处于其范围内,则视作正常等的判断方法。只要输出值正常,就将在通常行驶模式121下发现的错误视为过渡性的错误,进入步骤S12304。除此之外,视为恒久的错误,进入步骤S12306。
(图7:步骤S12304)
处理器110判定核心A111所执行的通常控制程序120的输出值与核心B112所执行的退化控制程序130的输出值是否充分地接近。例如,若两者的差值小于预定阈值的状态持续预定时间,则可以视为它们充分地接近。在满足上述条件的情况下,进入步骤S12305,除此之外,继续进行本步骤。
(图7:步骤S12304:补充其1)
在通常控制程序120的输出值与退化控制程序130的输出值不接近的情况下,在从恢复行驶模式123向通常行驶模式121迁移的定时产生较大的控制段差(在模式迁移时,控制参数断续地大幅度变化),存在有损流畅的驾驶性的可能性。引起该控制段差的理由在于,重新起动核心A111,从而核心A111所处理的通常控制程序120中的积分器/微分器、系统内部的状态量等历史数据损失。因此,在本实施方式1中,在向通常行驶模式121恢复之前,在恢复行驶模式123下预先执行通常控制程序120,再次收集历史数据,由此缓和控制段差。
(图7:步骤S12304:补充其2)
由于控制参数的性质,还考虑只要处于正常范围内,就不太可能产生控制段差的情况。在该情况下,在步骤S12303中,若通常控制程序120的输出值为正常,则也能够跳过本步骤而进入S12305。
(图7:步骤S12303~S12304:补充)
这些步骤相当于图3中的恢复成功与否判断处理。执行这些步骤的既可以是核心B112,也可以是未图示的第3处理器核心。
(图7:步骤S12305)
处理器110使车辆控制装置1从恢复行驶模式123向通常行驶模式121迁移。
(图7:步骤S12306)
处理器110使核心A111停止,使车辆控制装置1从恢复行驶模式123向退化行驶模式122迁移。
图8是表示现有技术中的车辆控制装置的输出值的经时变化的图。纵轴表示车辆控制装置输出的控制信号(控制参数)的输出值,横轴表示经过时间。假定车辆控制装置在时刻t2从退化行驶模式122向通常行驶模式121迁移。
在现有技术中,也能够从退化行驶模式122恢复至通常行驶模式121,但通过使核心A111重新起动,通常控制程序120内的积分器/微分器、系统内部的状态量等历史数据损失,因此在时刻t2实际的输出值从目标输出值大幅度背离,控制段差变大。该较大的控制段差成为有损流畅的驾驶性的原因。
图9是表示车辆控制装置1经由输入输出部140输出的输出值的经时变化的图。假定车辆控制装置1在时刻t1从退化行驶模式122向恢复行驶模式123迁移,在时刻t2还向通常行驶模式121迁移。纵轴和横轴与图8同样。
车辆控制装置1在恢复行驶模式123下利用核心A111执行通常控制程序120,能够在向通常行驶模式121恢复之前再次收集积分器/微分器、系统内部的状态量等的历史数据。由此,缓和在时刻t2向通常行驶模式121恢复之际的控制段差,能够使使用者获得流畅的驾驶性。
图10是表示车辆控制装置1的消耗电力的经时变化的图。多核处理器能够通过使不使用的核心休眠来降低作为处理器整体的消耗电力是已知的。因此,车辆控制装置1在退化行驶模式122下使核心A111转移至停止或休眠模式等而使消耗电力比通常动作时低,从而能够抑制作为车辆控制装置1整体的消耗电力。
在通常行驶模式121和恢复行驶模式123下,使核心A111动作,因此,车辆控制装置1的消耗电力比退化行驶模式122上升。另外,因某种原因不可能从恢复行驶模式123向通常行驶模式121恢复的情况下,可以通过从恢复行驶模式123向退化行驶模式122迁移来抑制消耗电力。
期望的是,为了在通常行驶模式121下检测到错误之际即时向退化行驶模式122迁移,处理器110在执行通常行驶模式121的期间也使核心B112启动。
<实施方式1:总结>
本实施方式1的车辆控制装置1在从退化行驶模式122向通常行驶模式121恢复之前执行恢复行驶模式123,在恢复行驶模式123下,对通常行驶模式121的控制参数进行运算并进行检查,并且对退化行驶模式122的控制参数进行运算,并将这些用于车辆控制。由此,在向通常行驶模式121恢复之前预先对该模式下的控制参数进行运算,能够在恢复时缓和控制参数断续地变化。
<实施方式2>
图11是本发明的实施方式2的车辆控制装置1的系统结构图。在本实施方式2中,车辆控制装置1除了在实施方式1中说明的结构之外,还具备监视部150。其他结构与实施方式1相同。
监视部150判定是使用通常控制程序120的输出值和退化控制程序130的输出值中的哪一个来控制车辆,将所采用的输出值递交给输入输出部140。例如在恢复行驶模式123下,分别接收通常控制程序120的输出值和退化控制程序130的输出值,能够将更靠近所预先规定的正常范围的一方采用为用于车辆控制的控制参数。
<实施方式3>
图12是本发明的实施方式3的车辆控制装置1的系统结构图。在本实施方式3中,核心A111和核心B112分别构成为锁步核心(Lockstep Core)。锁步核心是指,多个处理器核心执行相同的运算并将其执行结果相互比较,来检测错误。因而,本实施方式3的车辆控制装置1在通常行驶模式121的错误确认处理中,基于锁步核心间的输出不一致对核心A111的错误进行检测。其他结构与实施方式1相同。
<实施方式4>
图13是表示本发明的实施方式4的车辆控制装置1的动作的状态迁移图。在本实施方式4中,车辆控制装置1是对自动行驶车的动作进行控制的装置。本实施方式4中的车辆控制装置1执行自动行驶模式124来替代通常行驶模式121,执行使用者行驶模式125来替代退化行驶模式122。其他结构与实施方式1相同。
自动行驶模式124是使车辆自律行驶的动作模式。使用者行驶模式125是驾驶员通过手动操纵使车辆行驶的动作模式。在各模式下,处理器110运算用于使车辆以该模式动作的控制参数。
根据本实施方式4,即使在自动行驶车在自动行驶中发现错误,一旦向手动操纵转移之后重新恢复到自动行驶的情况下,也与其他实施方式同样地缓和控制段差而能够提供流畅的乘车感觉。
<对于本发明的变形例>
本发明并不限定于上述实施方式,包括各种变形例。例如、上述的实施方式是为了对本发明通俗易懂地进行说明而进行的详细说明,并不限定于必须具备所说明的全部的结构。另外,能够将某一实施方式的结构的一部分置换成其他实施方式的结构,另外,也能够将其他实施方式的结构添加于某一实施方式的结构。另外,能够对各实施方式的结构的一部分,进行其他构成的追加、删除、置换。
本发明并不限于轿车,能够适用于铁道、输送设备等各种车辆及其控制装置。能够根据为了对车辆控制装置1所控制的电气设备进行控制而需要的控制处理的内容来确定处理器110所运算的控制参数。例如在车辆控制装置1对电动汽车进行控制的情况下,能够对用于驱动控制车载变换器(inverter)的控制参数进行运算。或者,若是对汽油驱动车进行控制的情况下,则能够对用于驱动控制车载发动机的控制参数进行运算。
在以上的实施方式中,处理器110也可以通过执行安装有恢复行驶模式123的程序来执行恢复行驶模式123,也可以利用电路器件等硬件安装同样的功能并调用该功能来执行该模式。
在以上的实施方式中,处理器110具备用于执行恢复行驶模式123的处理器核心,也可以使用该核心执行恢复行驶模式。但是,为了判定核心A111的错误是否恢复,至少需要将核心A111设为执行通常控制程序120。因而,期望的是执行恢复行驶模式123的核心仅执行恢复任务、恢复成功与否判断。
上述各结构、功能、处理部、处理部件等,也可以通过利用以例如集成电路设计等而以硬件来实现它们的一部分、全部。另外,上述的各结构、功能等也可以通过处理器解释并执行实现各功能的程序而以软件实现。实现各功能的程序、表格、文件等信息能够储存于存储器、硬盘、SSD(固态硬盘,Solid StateDrive)等记录装置、IC卡、SD卡、DVD等记录介质。
符号说明
1:车辆控制装置、110:处理器、111:核心A、112:核心B、120:通常控制程序、130:退化控制程序、140:输入输出部、11:初始化处理模式、12:车辆行驶模式、121:通常行驶模式、122:退化行驶模式、123:恢复行驶模式、13:后处理模式。
Claims (10)
1.一种车辆控制装置,其对车辆的行驶动作进行控制,该车辆控制装置的特征在于,
具备:处理器,其运算对所述车辆的行驶动作进行控制的控制参数,
所述处理器执行第1行驶控制模式、第2行驶控制模式以及第3行驶控制模式,第1行驶控制模式是使所述车辆根据第1控制程序、以第1行驶模式行驶的行驶控制模式,第2行驶控制模式是使所述车辆根据第2控制程序、以功能比所述第1行驶模式退化的第2行驶模式行驶的行驶控制模式,第3行驶控制模式是使所述车辆以从所述第2行驶模式向所述第1行驶模式迁移期间的过渡的行驶模式即第3行驶模式行驶的行驶控制模式,
在执行所述第3行驶控制模式的期间,所述处理器使用所述第1控制程序运算在所述第1行驶模式下对所述车辆的行驶动作进行控制的第1控制参数,并且,使用所述第2控制程序运算在所述第2行驶模式下对所述车辆的行驶动作进行控制的第2控制参数,并将第1控制程序的输出值和第2控制程序的输出值输出到所述车辆控制装置的监视部,
所述监视部判定是使用第1控制程序的输出值和第2控制程序的输出值中的哪一个来控制车辆,并将所采用的输出值作为用于车辆控制的控制参数递交给输入输出部。
2.根据权利要求1所述的车辆控制装置,其特征在于,
所述处理器进行如下控制:
在所述第3行驶控制模式下,在判定为所述第1控制参数正常的情况下,从所述第3行驶控制模式向所述第1行驶控制模式迁移,在判定为所述第1控制参数不正常的情况下,从所述第3行驶控制模式向所述第2行驶控制模式返回。
3.根据权利要求2所述的车辆控制装置,其特征在于,
所述处理器进行如下控制:
从所述第3行驶控制模式向所述第2行驶控制模式返回前,测量所述第1控制参数与所述第2控制参数之间的差值为预定阈值以下的时间,
在所述差值为所述预定阈值以下的时间达到了预定时间以上的时间点,从所述第3行驶控制模式向所述第1行驶控制模式迁移。
4.根据权利要求1所述的车辆控制装置,其特征在于,
所述处理器具备:第1处理器核心,其执行所述第1行驶控制模式;以及第2处理器核心,其执行所述第2行驶控制模式,
所述处理器进行如下控制:
在所述第3行驶控制模式下,通过所述第1处理器核心执行所述第1行驶控制模式来运算所述第1控制参数,与此并行地,所述第2处理器核心执行所述第2行驶控制模式来运算所述第2控制参数。
5.根据权利要求4所述的车辆控制装置,其特征在于,
所述处理器进行如下控制:在所述第2处理器核心执行所述第2行驶控制模式时,使所述第1处理器核心向电能消耗比所述第1处理器核心执行所述第1行驶控制模式时低的状态迁移。
6.根据权利要求4所述的车辆控制装置,其特征在于,
所述处理器进行如下控制:在执行所述第3行驶控制模式时,使所述第1处理器核心和所述第2处理器核心并行动作,来消耗比执行所述第2行驶控制模式时多的电力。
7.根据权利要求4所述的车辆控制装置,其特征在于,
所述处理器进行如下控制:在从所述第1行驶控制模式向所述第3行驶控制模式迁移之后且开始对所述第1控制参数进行运算之前,通过重新启动所述第1处理器核心而使所述第1处理器核心初始化。
8.根据权利要求1所述的车辆控制装置,其特征在于,
所述处理器运算为了对所述车辆所搭载的车载逆变器进行控制而使用的所述控制参数。
9.根据权利要求1所述的车辆控制装置,其特征在于,
所述处理器运算为了对所述车辆所搭载的发动机进行控制而使用的所述控制参数。
10.根据权利要求1所述的车辆控制装置,其特征在于,
所述处理器运算在所述第1行驶控制模式下为了使所述车辆自动行驶而使用的所述控制参数,
所述处理器运算在所述第2行驶控制模式下为了使所述车辆手动行驶而使用的所述控制参数。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015-151847 | 2015-07-31 | ||
| JP2015151847A JP2017033236A (ja) | 2015-07-31 | 2015-07-31 | 車両制御装置 |
| PCT/JP2016/071199 WO2017022476A1 (ja) | 2015-07-31 | 2016-07-20 | 車両制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107533498A CN107533498A (zh) | 2018-01-02 |
| CN107533498B true CN107533498B (zh) | 2020-10-30 |
Family
ID=57943880
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201680025163.2A Active CN107533498B (zh) | 2015-07-31 | 2016-07-20 | 车辆控制装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10788826B2 (zh) |
| EP (1) | EP3330857B1 (zh) |
| JP (1) | JP2017033236A (zh) |
| CN (1) | CN107533498B (zh) |
| WO (1) | WO2017022476A1 (zh) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6901881B2 (ja) * | 2017-03-21 | 2021-07-14 | 日立Astemo株式会社 | 車両用制御装置 |
| JP6719433B2 (ja) | 2017-09-22 | 2020-07-08 | 株式会社日立製作所 | 移動体の制御システムおよび移動体の制御方法 |
| WO2019106830A1 (ja) * | 2017-12-01 | 2019-06-06 | 株式会社日立製作所 | 分散制御装置 |
| US10802929B2 (en) * | 2018-01-03 | 2020-10-13 | Tesla, Inc. | Parallel processing system runtime state reload |
| JP7050589B2 (ja) * | 2018-06-13 | 2022-04-08 | 株式会社クボタ | 収穫機の走行制御装置 |
| JP7384554B2 (ja) | 2018-08-30 | 2023-11-21 | トヨタ自動車株式会社 | ブレーキecu、システム、制御方法及び車両 |
| US11106205B2 (en) * | 2018-09-18 | 2021-08-31 | Raytheon Technologies Corporation | Vehicle control with functional redundancy |
| JP7135928B2 (ja) | 2019-02-20 | 2022-09-13 | 株式会社デンソー | 監視装置及び駆動力制御システム |
| JP6936349B2 (ja) * | 2020-01-29 | 2021-09-15 | 本田技研工業株式会社 | 車両制御装置、車両、および車両制御方法 |
| DE102020205146A1 (de) * | 2020-04-23 | 2021-10-28 | Robert Bosch Gesellschaft mit beschränkter Haftung | Vorrichtung und Verfahren zur Steuerung eines technischen Systems |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010020621A (ja) * | 2008-07-11 | 2010-01-28 | Toyota Infotechnology Center Co Ltd | プログラム修復システムおよび方法 |
| EP2192489A1 (en) * | 2008-11-28 | 2010-06-02 | Hitachi Automotive Systems Ltd. | Multi-core processing system for vehicle control or an internal combustion engine controller |
| JP2012168605A (ja) * | 2011-02-10 | 2012-09-06 | Toyota Motor Corp | 制御装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10101827A1 (de) | 2001-01-17 | 2002-07-18 | Daimler Chrysler Ag | Lenkanordnung für Kraftfahrzeuge |
| JP2002287997A (ja) | 2001-03-23 | 2002-10-04 | Kinji Mori | 多重系処理方法 |
| WO2006080227A1 (ja) | 2005-01-25 | 2006-08-03 | Yokogawa Electric Corporation | 情報処理装置および情報処理方法 |
| JP4458119B2 (ja) | 2007-06-11 | 2010-04-28 | トヨタ自動車株式会社 | マルチプロセッサシステム及びその制御方法 |
| KR20150033742A (ko) * | 2012-09-24 | 2015-04-01 | 닛산 지도우샤 가부시키가이샤 | 전동 차량의 제어 장치 |
| US9221396B1 (en) * | 2012-09-27 | 2015-12-29 | Google Inc. | Cross-validating sensors of an autonomous vehicle |
| JP6360387B2 (ja) * | 2014-08-19 | 2018-07-18 | ルネサスエレクトロニクス株式会社 | プロセッサシステム、エンジン制御システム及び制御方法 |
-
2015
- 2015-07-31 JP JP2015151847A patent/JP2017033236A/ja active Pending
-
2016
- 2016-07-20 WO PCT/JP2016/071199 patent/WO2017022476A1/ja active Application Filing
- 2016-07-20 EP EP16832755.9A patent/EP3330857B1/en active Active
- 2016-07-20 CN CN201680025163.2A patent/CN107533498B/zh active Active
- 2016-07-20 US US15/735,050 patent/US10788826B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010020621A (ja) * | 2008-07-11 | 2010-01-28 | Toyota Infotechnology Center Co Ltd | プログラム修復システムおよび方法 |
| EP2192489A1 (en) * | 2008-11-28 | 2010-06-02 | Hitachi Automotive Systems Ltd. | Multi-core processing system for vehicle control or an internal combustion engine controller |
| JP2012168605A (ja) * | 2011-02-10 | 2012-09-06 | Toyota Motor Corp | 制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017033236A (ja) | 2017-02-09 |
| US10788826B2 (en) | 2020-09-29 |
| EP3330857B1 (en) | 2020-11-11 |
| CN107533498A (zh) | 2018-01-02 |
| US20180181124A1 (en) | 2018-06-28 |
| EP3330857A1 (en) | 2018-06-06 |
| EP3330857A4 (en) | 2019-04-17 |
| WO2017022476A1 (ja) | 2017-02-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107533498B (zh) | 车辆控制装置 | |
| CN110650878B (zh) | 异常判定装置、异常判定方法以及计算机可读存储介质 | |
| JP4525762B2 (ja) | 車両用電子制御装置 | |
| CN108698630B (zh) | 用于提高助力转向装置的失效安全性的计算和功能架构系统 | |
| CN107077407B (zh) | 车辆控制装置 | |
| JP6364486B2 (ja) | 車載制御装置または車載制御システム | |
| JP5967059B2 (ja) | 車両用電子制御装置 | |
| US9068527B2 (en) | Monitoring computer in a control device | |
| KR100711850B1 (ko) | 마이크로컴퓨터 감시 금지 기능을 갖는 전자 제어 시스템및 방법 | |
| US8868298B2 (en) | Electric power assist steering motor sensor redundancy | |
| JP5629646B2 (ja) | 車両用制御装置 | |
| JP6075262B2 (ja) | 制御装置 | |
| US20190077451A1 (en) | External watchdog with integrated backward regeneration support | |
| JP5226653B2 (ja) | 車載制御装置 | |
| JP2010101249A (ja) | 内燃機関のアイドルストップ制御装置 | |
| CN113891824B (zh) | 车载控制装置和车载控制系统 | |
| JP7379894B2 (ja) | モータ制御装置 | |
| JP6597489B2 (ja) | 車両制御装置 | |
| JP4639920B2 (ja) | 電子制御装置 | |
| JP2014056396A (ja) | 電子制御装置 | |
| KR102214574B1 (ko) | 클러치모터의 정상동작 판단방법 | |
| JP5920244B2 (ja) | 異常検知装置 | |
| Pasagadugula et al. | Effective approach for Redundancy in compliance with ISO26262 | |
| CN116438521A (zh) | 车载用控制系统 | |
| CN118545150A (zh) | 电动助力转向系统的控制方法、装置、存储介质和车辆 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CP01 | Change in the name or title of a patent holder |
Address after: Ibaraki Patentee after: Hitachi astemo Co.,Ltd. Address before: Ibaraki Patentee before: HITACHI AUTOMOTIVE SYSTEMS, Ltd. |
|
| CP01 | Change in the name or title of a patent holder |