CN103460073A - 地震警报系统 - Google Patents
地震警报系统 Download PDFInfo
- Publication number
- CN103460073A CN103460073A CN2011800683328A CN201180068332A CN103460073A CN 103460073 A CN103460073 A CN 103460073A CN 2011800683328 A CN2011800683328 A CN 2011800683328A CN 201180068332 A CN201180068332 A CN 201180068332A CN 103460073 A CN103460073 A CN 103460073A
- Authority
- CN
- China
- Prior art keywords
- signal
- sensor
- secondary signal
- seismic events
- parameter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 claims abstract description 67
- 238000001514 detection method Methods 0.000 claims abstract description 15
- 238000004891 communication Methods 0.000 claims description 46
- 230000002596 correlated effect Effects 0.000 claims description 36
- 239000013598 vector Substances 0.000 claims description 29
- 238000005070 sampling Methods 0.000 claims description 23
- 238000006073 displacement reaction Methods 0.000 claims description 16
- 230000000875 corresponding effect Effects 0.000 claims description 10
- 239000011435 rock Substances 0.000 claims description 7
- 230000005489 elastic deformation Effects 0.000 claims description 6
- 238000005259 measurement Methods 0.000 abstract description 5
- 230000006870 function Effects 0.000 description 33
- 238000010586 diagram Methods 0.000 description 11
- 230000004044 response Effects 0.000 description 9
- 238000005516 engineering process Methods 0.000 description 8
- 230000008569 process Effects 0.000 description 8
- 238000012545 processing Methods 0.000 description 8
- 230000006855 networking Effects 0.000 description 7
- 230000002441 reversible effect Effects 0.000 description 7
- 230000001360 synchronised effect Effects 0.000 description 6
- 230000009471 action Effects 0.000 description 5
- 230000035939 shock Effects 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 4
- 238000013459 approach Methods 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 4
- 238000005315 distribution function Methods 0.000 description 4
- 230000006872 improvement Effects 0.000 description 4
- 238000000926 separation method Methods 0.000 description 4
- 238000005314 correlation function Methods 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 238000001615 p wave Methods 0.000 description 3
- 241000209094 Oryza Species 0.000 description 2
- 235000007164 Oryza sativa Nutrition 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000036461 convulsion Effects 0.000 description 2
- 230000006378 damage Effects 0.000 description 2
- 230000001934 delay Effects 0.000 description 2
- 230000002349 favourable effect Effects 0.000 description 2
- 235000009566 rice Nutrition 0.000 description 2
- 238000003325 tomography Methods 0.000 description 2
- 101100083063 Candida albicans (strain SC5314 / ATCC MYA-2876) PGA57 gene Proteins 0.000 description 1
- 101100083064 Candida albicans (strain SC5314 / ATCC MYA-2876) PGA58 gene Proteins 0.000 description 1
- 206010038743 Restlessness Diseases 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000010224 classification analysis Methods 0.000 description 1
- 230000019771 cognition Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 230000003862 health status Effects 0.000 description 1
- 239000004615 ingredient Substances 0.000 description 1
- 230000005764 inhibitory process Effects 0.000 description 1
- 230000002045 lasting effect Effects 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 230000000644 propagated effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 230000001932 seasonal effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V1/00—Seismology; Seismic or acoustic prospecting or detecting
- G01V1/01—Measuring or predicting earthquakes
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B21/00—Alarms responsive to a single specified undesired or abnormal condition and not otherwise provided for
- G08B21/02—Alarms for ensuring the safety of persons
- G08B21/10—Alarms for ensuring the safety of persons responsive to calamitous events, e.g. tornados or earthquakes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V2210/00—Details of seismic processing or analysis
- G01V2210/10—Aspects of acoustic signal generation or detection
- G01V2210/12—Signal generation
- G01V2210/123—Passive source, e.g. microseismics
- G01V2210/1232—Earthquakes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V2210/00—Details of seismic processing or analysis
- G01V2210/60—Analysis
- G01V2210/65—Source localisation, e.g. faults, hypocenters or reservoirs
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V2210/00—Details of seismic processing or analysis
- G01V2210/70—Other details related to processing
- G01V2210/72—Real-time processing
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Environmental & Geological Engineering (AREA)
- Geology (AREA)
- General Life Sciences & Earth Sciences (AREA)
- General Physics & Mathematics (AREA)
- Business, Economics & Management (AREA)
- Emergency Management (AREA)
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Acoustics & Sound (AREA)
- Geophysics (AREA)
- Geophysics And Detection Of Objects (AREA)
Abstract
一种用于检测地震事件的方法或系统,包括:在测量位置使用至少一个传感器检测地震事件的主波;使用所检测到的主波的至少一个参数来确定测量位置处的估计峰值地面强度而不确定地震事件的震级;确定地震事件的震中;以及使用所确定的估计峰值地面强度和指定位置距震中的距离估计指定位置处的地震事件的强度。震中能够使用在单一位置处的传感器来确定。噪声检测系统能够过滤掉对应于本地振动而非地震事件的所检测的信号。
Description
相关申请的交叉引用
本申请要求于2010年12月17日提交的题为“地震警报系统”的美国临时申请第61/424,165号的优先权。本申请还要求于2010年12月17日提交的题为“快速、可靠的联网地震警报系统”的美国临时申请第61/424,193号的优先权。本申请还要求于2010年12月17日提交的题为“快速、可靠的地震警报系统”的美国临时申请第61/424,175号的优先权。
上面所引用的所有申请的全部内容都通过引用并入本文。
通过引用并入
在本说明书中提及的所有出版物及专利申请均通过引用并入本文,其程度如同每一单独出版物或专利申请被具体地和单独地指明通过引用而并入本文。
技术领域
本申请总体上涉及地震的检测和警报。特别地,本申请涉及确定地震的强度而不估计震级、使用单个站点估计震中位置、以及降低所感测的信号中的噪声。
背景技术
地震警报系统(EWS)依靠快速检测和地震地面运动的表征来在危险震动前提供警告。大多数现有的EWS被设计成通过感测P波的到来和分析P波来检测地震的开始,以通过P波的某些属性和历史地震的震级之间的经验关系估计正在进行的事件的震级。几个站点处的P波到达时间用来估计事件的震中。使用震级、震中距离与地面运动强度之间的经验关系,所估计的震级和震中随后被用来估计即将发生的地面运动的强度。基于P波的EWS能提供的警报量与距震中的距离成正比。一般的经验法则是每8公里1秒。
这种技术导致从P波估计震级和从震级估计强度之间的不确定性倍增。此外,时间是地震警报中的关键因素,而这种两步估计不必要地增加了计算时间。该估计中的测量不确定性通常不与估计本身一起被报告,这导致了不连续的响应行为,在该不连续的响应行为中,由于已超过特定的阈值,所以所估计的地面运动中的微小变化导致了截然不同的响应。例如,假设对于某一任意标度中的5或更大的估计强度,将发出警报声。在不报告估计中的不确定性的情况下,估计强度为4.999的响应与估计强度为5.000的响应是截然不同的。在后一种情况下,发出警报声,而在前一种情况下,对于一个非常类似的地面运动估计,不发出警报声。但是,如果这两种估计强度由于它们各自的误差范围而在统计学上没有区别,则对估计的警报或其他响应不应该不同。
其他EWS依靠在足够的距离处检测S波,以便提供强烈的冲击波的警报。警报时间的量可能更少,因为S波比P波传播更慢,但强度估计中的一些不确定性通过等待直接测量S波而得以降低。当可能的震中距人口中心足够远时,这种方法最有效,以便为远程传感器提供等待S波的时间以及仍然能够提供有用的警报。这样的系统向墨西哥城发出了源于海岸的地震警报。
EWS设计各有不同,但一般可描述为单机的或联网的。单机EWS使用本地感测设备来对地震是否已经开始以及地震是否有足够的强度来证明应当发起保护行动进行严格地本地判定。这些系统可以迅速对P波的到来作出反应,但可能遭遇有问题的误报表现。依赖于S波检测的单机设备通常被称为地震开关。这些不提供地震警报,因为它们仅在严重的震动开始后才作出响应,但能够发起可以防止破坏的行动。
联网的EWS包括地理上分散的站点,这些站点被放置以使到可能的震中附近的可能的地震震中的距离最小化。当地震发生时,P波向外传播最先到达最近的站点,然后该最近的站点向所有其他受影响的站点发送信号。该EWS能提供的警报时间优于每个单机站点可能提供的警报时间,因为来自最近的站点的信号将在P波到达之前到达其他站点。
单机系统的正常警报时间由下式给出:
t警报-单机=ts-tp
其中ts是S波从震源到站点的传播时间,而tp是P波从震源到站点的传播时间。这些传播时间为:
其中d是从震源到站点的距离,VS是S波的速度,VP为P波的速度。对于泊松固体(对地球的地壳特性的一个很好的近似)而言:
P波到达第一传感器站点所需的时间是:
其中tF是P波从震源到第一传感器站点的传播时间,而dF是从震源到第一传感器站点的距离。联网的EWS的警报时间(忽略处理和通信延迟)是:
t警报-EWS=ts-tF
警报中的改善是:
当第一传感器站点位于震中(dF=0,忽略深度)时,改善率是:
改善=2.4
由于在上面的分析中所忽略的各种系统延迟和震源深度,通常认为近似为2.4的改善在实践中是不可能的。但是,仍然能有显著的改善,这是联网的EWS是一种有利的架构的一个原因。
在标准的EWS系统中,有许多由诸如算法误差、电气噪声、故障、或组件故障等因素造成的误报源,但最常见的误报源是人为噪声:人造振动,其难以与地震事件区分或干扰地震分析算法。通过等待多个站点来报告而降低误报概率以警报时间换取了可靠性。
联网的EWS能潜在地提供比单机EWS更好的误报表现。为了解决误报的问题,可以推迟发布警报的决定直到几个站点报告地震。越多的站点报告地震,就有越多的信心发起成本高昂的行动。然而,花在等待多个站点上的时间减少了可用于完成保护行动的时间;该时间可在保护生命和减少资产损失方面具有重要的价值。但是,如果通过等待多个站点来报告才成为可能的可靠性和信心可以仅使用单个站点来实现,则EWS的性能将被提高,这有助于更接近那个2.4的改善率。
EWS的价值通过其减少伤害和保护资产不受破坏的能力进行衡量。可靠的EWS,即,一种避免误报并快速响应来为完成保护行动提供尽可能多的时间的系统,将对暴露于地震灾害中的那些人(物)具有重大价值。
发明内容
一般来说,在一个实施方式中,一种用于检测地震事件的方法包括:在测量位置使用至少一个传感器检测地震事件的主波;使用所检测到的主波的至少一个参数来确定在测量位置处的估计峰值地面强度而不确定地震事件的震级;确定地震事件的震中;以及使用所确定的估计峰值地面强度和指定位置距震中的距离,估计该指定位置处的地震事件的强度。
另外或者可选地,该实施方式和其它实施方式可包括下列特征中的一个或多个。
该方法还可以包括如果地震事件的强度大于阈值则发出警报。发出警报可以包括将警报作为概率函数发出。可以使用代表期望值的一个参数和代表分布偏差的一个参数对概率函数进行编码。
确定震中可以包括使用从至少一个传感器收集的信息和从另一测量位置处的传感器收集的信息,至少一个传感器和在另一测量位置处的传感器通过通信网络连接。
使用所检测到的主波的至少一个参数来确定在测量位置处的估计峰值地面强度可以包括利用在至少一个参数和地面运动峰值之间建立的经验关系来确定地面运动峰值。所建立的经验关系可以基于先前的地震数据。
至少一个参数可以包括在时域或频域中的振幅信息。
至少一个传感器可以包括加速度计、GPS传感器、位移传感器、或速度传感器。
估计在指定位置的地震事件的强度可以包括使用在峰值地面强度与指定位置距震中的距离之间建立的经验关系。所建立的经验关系可以基于先前的地震数据。该经验关系可以是:
PGM=A·C
其中R是距表面断层迹线的距离,R0是具有断裂长度的量级的常数,A0是岩石的弹性变形极限,并且M、N和K是常数。所述经验关系可以被绘制成地面运动峰值随着距震中的距离而衰减的曲线。
使用至少一个传感器检测地震事件的主波可以包括使用第一传感器来获得第一信号和使用第二传感器来获得第二信号、对第一信号和第二信号进行相关、以及仅当所述相关的结果满足设定的阈值时才确定第一信号和第二信号对应于地震事件的主波。对第一信号和第二信号进行相关包括比较幅度(magnitude)、方向向量或到达的时间。
一般来说,在一个实施方式中,一种用于检测地震事件的系统包括至少两个传感器和控制器,所述至少两个传感器被配置为检测地震事件的主波,控制器被配置为:使用所检测到的主波的至少一个参数来确定估计峰值地面强度而不确定地震事件的震级;确定地震事件的震中;以及使用所确定的估计峰值地面强度和指定位置距震中的距离来估计该指定位置处的地震事件的强度。
另外或者可选地,该实施方式和其它实施方式可包括下列特征中的一个或多个。
控制器还可以被配置为如果地震事件的强度大于阈值则发出警报。控制器可以被配置为将警报作为概率函数发出。可以使用代表期望值的一个参数和代表分布偏差的一个参数对概率函数进行编码。
所述至少两个传感器可以在不同的测量位置,这些测量位置通过通信网络连接。
控制器可以被配置为使用所检测到的主波的至少一个参数来通过使用在至少一个参数和地面运动峰值之间建立的用于确定地面运动峰值的经验关系来确定所述测量位置处的估计峰值地面强度。所建立的经验关系可以基于先前的地震数据。
至少一个参数可以是在时域或频域中的振幅信息。
至少两个传感器中的至少一个可以是加速度计、GPS传感器、位移传感器、或速度传感器。
控制器可以被配置为通过使用在峰值地面强度与指定位置距震中的距离之间建立的经验关系来估计在该指定位置处的地震事件的强度。所建立的经验关系可以基于先前的地震数据。该经验关系可以是:
PGM=A·C
其中R是距表面断层迹线的距离,R0是具有断裂长度的量级的常数,A0是岩石的弹性变形极限,并且M、N和K是常数。所述经验关系可以被绘制成地面运动峰值随着距震中的距离而衰减的曲线。
第一传感器可以被配置为获得第一信号,并且第二传感器可以被配置为获得第二信号,而控制器可以被配置为对第一信号和第二信号进行相关,以及仅当所述相关的结果满足设定的阈值时才确定第一信号和第二信号对应于地震事件的主波。控制器可以被配置为通过比较幅度、方向向量或到达的时间来对第一信号和第二信号进行相关。
一种检测地震事件的方法,包括:在测量位置处使用至少两个传感器检测地震事件的主波,其中,该至少两个传感器相距小于500米;使用所检测到的主波的至少一个参数来确定测量位置处的估计峰值地面强度;仅使用在测量位置处的所述至少两个传感器来确定地震事件的震中;以及使用所确定的估计峰值地面强度和指定位置距震中的距离来估计在该指定位置处的地震事件的强度。
另外或者可选地,该实施方式和其它实施方式可包括下列特征中的一个或多个。
所述至少两个传感器可以相距小于200米,例如相距小于100米。
该方法还可以包括如果地震事件的强度大于阈值则发出警报。发出警报可以包括将警报作为概率函数发出。可以使用代表期望值的一个参数和代表分布偏差的一个参数对概率函数进行编码。
所述至少两个传感器可以通过硬线通信网络进行连接。
至少两个传感器中的至少一个可以包括加速度计、GPS传感器、位移传感器、或速度传感器。
使用至少两个传感器检测地震事件的主波可以包括使用第一传感器来获得第一信号和使用第二传感器来获得第二信号、对第一信号和第二信号进行相关、以及仅当所述相关的结果满足设定的阈值时确定第一信号和第二信号对应于地震事件的主波。对第一信号和第二信号进行相关包括比较幅度、方向向量或到达的时间。
所述至少两个传感器可以是相同的。
确定震中可以包括将震中确定为以纬度和经度表示的概率密度函数。可以使用代表以经纬度表示的期望值的一个参数、沿两个主轴线的偏差、以及旋转角度对概率密度函数进行编码。概率密度函数可以使用方位角和倾角信息进行确定。该方法还可以包括使用关于当地的地质情况的先前信息、该区域中的其他测量位置的几何条件和其他测量位置的实时状态来调整概率密度函数。
一般来说,在一个方面,用于检测地震事件的系统包括至少两个传感器和控制器,所述至少两个传感器被配置为检测地震事件的主波,其中所述至少两个传感器相距小于500米。控制器被配置为使用所检测到的主波的至少一个参数来确定估计峰值地面强度;仅使用在测量位置的所述至少两个传感器来确定地震事件的震中;以及使用所确定的估计峰值地面强度和指定位置距震中的距离,估计在指定位置处的地震事件的强度。
所述至少两个传感器可以相距小于200米,例如相距小于100米。
控制器还可以被配置为如果地震事件的强度大于阈值则发出警报。控制器可以被配置为将警报作为概率函数发出。可以使用代表期望值的一个参数和代表分布偏差的一个参数对概率函数进行编码。
所述至少两个传感器可以通过硬线通信网络进行连接。
至少两个传感器中的至少一个包括加速度计、GPS传感器、位移传感器、或速度传感器。
第一传感器可以被配置为获得第一信号,并且第二传感器可以被配置为获得第二信号。控制器可以被配置为对第一信号和第二信号进行相关、以及仅当所述相关的结果满足设定的阈值时才确定第一信号和第二信号对应于地震事件的主波。对第一信号和第二信号进行相关可包括比较幅度、方向向量或到达的时间。
所述至少两个传感器可以是相同的。
控制器可以被配置为通过将震中确定为以纬度和经度表示的概率密度函数来确定震中。可以使用代表以经纬度表示的期望值的一个参数、沿两个主轴线的偏差、以及旋转角度对概率密度函数进行编码。概率密度函数可以使用方位角和倾角信息进行确定。控制器还可以被配置为使用关于当地的地质情况的先前信息、该区域中的其他测量位置的几何条件和其他测量位置的实时状态来调整概率密度函数。
一般来说,在一个方面,一种用于检测地震事件的主波的方法包括:从第一位置处的第一传感器获得第一地面振动信号;从第二位置处的第二传感器获得第二地面振动信号,第二位置在第一位置的500米的范围内;对第一信号和第二信号进行相关;以及仅当第一信号和第二信号的所述相关的结果满足设定的阈值时,使用第一信号或第二信号的至少一个参数来估计地震事件的强度。
另外或者可选地,该实施方式和其它实施方式可包括下列特征中的一个或多个。
第一传感器或第二传感器中的至少一个是加速度计、速度传感器、或位移传感器。
对第一信号和第二信号进行相关可以包括计算在第一信号和第二信号的方向向量中的差,并且满足设定的阈值可以包括小于设定的差。对第一信号和第二信号进行相关可以包括计算第一信号和第二信号的交叉相关峰值,并且满足设定的阈值可以包括低于设定值。对第一信号和第二信号进行相关可以包括计算第一信号和第二信号之间的时间延迟,并且满足设定的阈值可以包括小于设定的差。对第一信号和第二信号进行相关可以包括计算在第一信号和第二信号的幅度中的差,并且满足设定的阈值可以包括小于设定的差。
该方法还可以包括以超过100赫兹,例如超过200赫兹,例如超过800赫兹的采样率获得第一信号和第二信号。
该方法还可以包括如果地震事件的强度大于阈值则发出警报。发出警报可包括将警报作为概率函数发出。可以使用代表期望值的一个参数和代表分布偏差的一个参数对概率函数进行编码。可以实时连续地重复所述获得步骤和进行相关步骤。
至少两个传感器可以相距小于200米,例如相距小于100米。
一般来说,在一个方面,一种用于检测地震事件的系统包括在第一位置处的第一传感器、在第二位置处的第二传感器、以及控制器,该第一传感器被配置为获得第一地面振动信号,第二位置在第一位置的500米的范围内并且第二传感器被配置为获得第二地面振动信号。控制器被配置为对第一信号和第二信号进行相关,以及仅当第一信号和第二信号的所述相关的结果满足设定的阈值时,使用第一信号或第二信号的至少一个参数来估计地震事件的强度。
第一传感器或第二传感器中的至少一个可以是加速度计、速度传感器、或位移传感器。
控制器可被配置为通过计算第一信号和第二信号的方向向量中的差来对第一信号和第二信号进行相关,并且满足设定的阈值可以包括小于设定的差。该控制器可以被配置为通过计算第一信号和第二信号的交叉相关峰值来对第一信号和第二信号进行相关,并且满足设定的阈值可以包括低于设定值。控制器可以被配置为通过计算第一信号和第二信号之间的时间延迟来对第一信号和第二信号进行相关,并且满足设定的阈值可以包括小于设定的差。该控制器可以被配置为通过计算第一信号和第二信号的幅度中的差来对第一信号和第二信号进行相关,并且满足设定的阈值可以包括小于设定的差。
第一传感器和第二传感器可以被配置为以超过100赫兹,例如超过200赫兹,例如超过800赫兹的采样率获得第一信号和第二信号。
控制器还可以被配置为如果地震事件的强度大于阈值则发出警报。该控制器可以被配置为将警报作为概率函数发出。可以使用代表期望值的一个参数和代表分布偏差的一个参数对概率函数进行编码。
传感器可以被配置为实时地重复所述获得步骤,并且控制器可以被配置为实时地重复所述进行相关的步骤。
至少两个传感器可以相距小于200米,如相距小于100米。
附图说明
本发明的新颖特征在随后的权利要求中进行了特别阐述。通过参照以下阐述了示例性实施方式的详细描述和附图,可以更好地理解本发明的特征和优点,在这些示例性实施方式中利用了本发明的原理,在附图中:
图1描绘了带有几个传感器站点的区域性地震警报系统(EWS)。
图2是地震警报系统的框图。
图3是单一的传感器站点设备的系统简图。
图4是传感器站点设备的信号路径的框图。
图5是传感器站点设备中的传感器数据处理子系统的框图。
图6是传感器站点设备的本地源检测子系统的数据流程图。
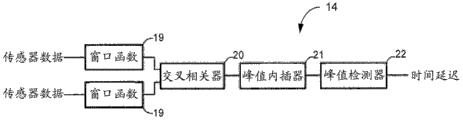
图7示出了交叉相关处理的框图。
图8示出了其中P波被突出显示的竖直通道加速度记录。
图9示出了来自2个传感器的图8的交叉相关的输出。
图10示出了显示7.5毫秒的时间延迟的200赫兹交叉相关的样条插值。
图11是示出了在分析子系统内处理输入和生成输出的流程图。
图12是表示在假设的P波属性和在给定的位置处的地面运动强度之间的示例经验关系的曲线图。
图13示出了根据到达时间确定方位角的例子。
图14是示出了方位角分辨率和时间差的曲线图。
图15是表示使用在单个站点处即将发生的地面运动的不确定性以及作为从该数据中推导出的震中距离的函数的经验地面运动曲线进行的估计的曲线图。
具体实施方式
参照图1,联网的地震警报系统包括地理上分散的站点或传感器子系统2,其被放置以使到至少一个断层1附近的可能的地震中心的距离最小化。所有的站点都经由通信网络进行连接。当地震发生在震中3处时,P波4向外传播首先到达最近的站点5,站点5随后向所有其他受影响的站点2发送信号。该EWS能提供的警报时间优于每个单机站点可能提供的警报时间,因为来自最近的站点5的信号将早在P波4到达之前到达其他站点2。
参考图2,地震警报系统包括三个子系统,其中包括传感器子系统2、分析子系统35和通信子系统10。
传感器子系统2包括控制器和一个或多个地面运动传感器以实时记录和报告地面运动。传感器子系统过滤掉任何噪声,并实时将收集到的信号或数据传递到分析子系统35。
分析子系统35包括至少一个计算机或控制器,该至少一个计算机或控制器被配置为从传感器子系统2和/或从通信子系统10中接收输入来计算震中位置并实时估计逼近的地面运动危险。分析子系统35可以本地地(即在特定的站点处)并在区域性的距离(即在震中的地理区域中的所有位置,包括其中记录数据的站点和周围的站和非站位置)处计算出该逼近的地面运动危险。此外,分析子系统35被配置为计算在地面运动和震中位置的估计中的不确定性。这些估计和不确定性从分析子系统35传递到通信子系统10。
通信子系统10包括用于发送和接收数据的网络。通信子系统10还包括至少一个控制器或计算机,该至少一个控制器或计算机被配置为将这些估计和不确定性编码为一组参数化数据。在优选实施方式中,该参数化采取代表连续分布函数中的期望值和偏差的一对数值的形式。必要时通信子系统10将该参数化数据传输到用于实现本地地震响应的本地设备、传输到被组织为对等网络的地理区域内的类似系统的网络、或传输到收集数据并将数据重新分配到地理区域内的类似系统的区域性数据中心。通信子系统10还或从对等网络中的其它类似系统或从区域性数据中心接收信息,并根据需要将数据传递到分析子系统35。
下面对三个子系统中的每一个进行详细描述。
传感器子系统
参见图3,每个传感器子系统2包括本地控制器7以及两个或多个感测设备6,感测设备6能够测量在至少一个轴线上的地面振动。在一个实施方式中,有通常向上、向北和向东取向的三轴感测设备。感测设备可以是加速度计、速度传感器或位移传感器。在一个实施方式中,有两个传感器,并且一个传感器是加速度计,而另一个传感器是高采样率的GPS传感器。在另一个实施方式中,有三个传感器,并且两个传感器是加速度计,而另一个传感器是高采样率的GPS传感器。
传感器子系统2中的传感器位于彼此相距500米的范围内,如彼此相距200米的范围内,如彼此相距100米的范围内,并且通过硬线通信网络连接在一起。
图4中示出了控制器7中的信号路径的主要部分的框图。感测设备6与主时钟8同步采样。对于多通道感测设备而言,通道之间的同步误差必须是低的,并且不同采样设备的通道之间的同步误差应当同等。在优选实施方式中,通道到通道的定时误差被保持在远低于10ns。感测设备之间的定时误差被保持在低于1μs。在一个实施方式中,传感器使用在传感器之间被同步的时钟对传感器输出进行数字采样。这些传感器物理上被分隔(多达100米),并且时钟从处理单元被分配给这些传感器。这些时钟确保传感器之间的采样时间误差小于1μs。
来自传感器6的数据由数据处理子系统9处理。图5示出了数据处理子系统(带有传感器)的框图。数据处理子系统9包括本地源检测器11、P波检测器12、和P波触发器13。P波检测器12使用来自传感器6的数据来检测P波的存在。可以例如,通过查看在一个长的时间周期内被平均的背景噪声能量来检测P波,而相同的估计在一个短的时间周期内被平均。当短时间的值超过长时间的值时,P波检测器可以发出已检测到冲击波的信号。本地源检测器11用于区分接近站点即小于1公里始发的振动,例如在阵列质心的约5-6个基线长度的范围内,所以在最坏的情况下,距离发生在更远处的那些约500-600米。本地源被假定为是人为起源而不是地震起源。P波检测器12和本地源检测器11的输出在P波触发器子系统13中进行比较,如果它们是本地起源,则P波触发器子系统13将拒绝由P波检测器12报告的所有P波。如图2所示,地震起源的P波随后被传递到通信子系统10以便传输到其他站点或直接传输到分析子系统35,用于检测地震事件的震中和强度。
本地源检测器11的框图被描绘成了图6中的框图。来自感测设备6的数据被实时地逐个样本地处理,以通过两个向量计算器15计算3维方向向量。如果可用通道少于3个,则所计算出的向量具有相应更少的维数。每个向量都通过幅度和三个方向余弦来描述:
其中,Z、N和E是来自三个传感器通道的数据样本。
来自感测设备的数据的交叉相关也由交叉相关器14计算。在优选实施方式中,Z通道用于交叉相关,因为它与初始地震运动(P波主要是竖直的)最密切相关,但输入通道的任意组合可以被交叉相关。特定的延迟(D)的交叉相关可以通过下式找出:
其中,Z1和Z2分别是来自传感器1和2的Z通道,mZ1和mZ2是Z1和Z2的平均值,并且i对输入缓冲器中的所有样本迭代。
完整的交叉相关通过在-maxDelta..0..maxDelta上迭代D来计算,其中maxDelta是采样周期的某一整数倍:
其中N是来自传感器数据向量的某一样本数目。
交叉相关器14的处理块的框图在图7中示出。来自感测设备的数据流通过(可选的)窗口函数19。窗口函数19补偿使用有限的时间序列的感测设备数据。典型的窗口函数包括Hamming、Hann、Blackman和Kaiser。被加窗后,数据流被传递到交叉相关函数20。为了实现高效的处理,交叉相关例程被写入作为头尾函数,这大大降低了每个周期的处理量。
交叉相关函数20的输出既被单独地用于确定是否有本地源又被用于找出这两个感测设备数据流之间的时间延迟。首先,如果归一化的交叉相关峰值小于特定量,如20分贝,例如小于10分贝,例如小于6分贝,则可以判定信号是不相关的并作为本地源被拒绝。
此外,交叉相关函数20可以用来检测两个信号之间的时间延迟,因为该时间延迟表现为交叉相关的输出中的峰值。图8中示出了一种示例竖直加速度波形。该波形的P波部分在24处示出,而第一S波峰值在23处示出。交叉相关的输出如图9所示。峰值25是明显的并示出了5毫秒的延迟。
交叉相关如图9所示。通过在交叉相关值之间进行插值,子采样时间差是可能的。这可以通过使用多项式或其他技术对交叉相关的输出进行插值而实现。在图10中,示出了200赫兹的交叉相关,其峰值位于5毫秒到10毫秒之间。三次样条插值将时间延迟峰值识别为7毫秒的子采样精度。
返回参照图7,在21处对交叉相关器的输出进行插值,并且所确定的峰值在22处被确定。
返回参照图6,峰值被用于度量这两个感测设备之间的到达时间差。由于可能的时间差的范围较小,所以基于传感器的分隔和冲击波的速度,可以针对有限数目的延迟来计算交叉相关。对于200赫兹的采样率,D(所计算出的交叉相关中的时间延迟)的值可以被限定为n=-2,-l,0,l,2,其中D=n/Fs。传递至交叉相关器的数据的长度将需要更大,以便用于更高阶的插值来实现更好的时间分辨率。
所计算出的时间延迟被用来既确定所检测到的信号是否是本地信号又用于使向量数据移位(shift)以允许进一步的比较。
即,所计算出的时间延迟可以被用来确定两个感测设备数据流是否落入窄的时间窗内,该窄的时间窗由感测设备分隔距离和本地P波速度(标称地为6.2公里/秒)确定。例如,对于20米的分隔距离而言,3.2毫秒或更大的时间差可以被标记为假事件。此参数基于对当地P波速度的更好地估计来调整。
此外,时间延迟可被用来控制16处的可变时间延迟模块以使向量移位。在一个实施方式中,时间延迟模块16是带有几个抽头的移位寄存器。所选择的抽头对应于来自交叉相关器的时间延迟。两个时间延迟模块的输出随后在时间上被同步并且可被比较。
对于子采样时间延迟而言,计算相邻的方向向量之间的线性插值如下:
其中tXC是由交叉相关器计算出的时间延迟,αZ1(i)为传感器1的Z通道的方向余弦的第i个样本,并且ti是第i个时间样本(采样周期的倍数)。更复杂的插值方案是有可能的,但很少需要,因为数据有些噪声。其他的方向余弦可被类似地计算。
仍参照图6,时间被同步后,向量在17处被比较。该比较可用于确定两个向量流的方向相关性。对于与感测设备的分隔相比其距离较大的那些远处振动源而言,方向向量应该是平行的。这通过比较这两个向量流的方向余弦而确定。如果误差的幅度超过最大阈值,例如10度,则判断该源是本地的。

此外,该比较可用于确定这两个向量流的幅度相关性。如果这两个感测设备以相同的方式被安装,则地震源应当被类似地记录。本地振动源可能会影响一个感测设备(最近的)多于另一个感测设备。大于特定的百分比例如大于15%的幅度差可用于指示本地源。
本地检测器18检测本地事件,因此这些本地事件能够被拒绝。与上面描述的方法一致,如果以下成立,则本地检测器的输出为真(意味着是本地源):
向量_方向_误差>方向_阈值,或
交叉_相关<交叉相关_阈值,或
时间_延迟>时间_阈值,或
|幅度(传感器l)–幅度(传感器2)|>幅度_阈值,或
比率(幅度(传感器l)对幅度(传感器2))>幅度_阈值,或
比率(幅度(传感器2)对幅度(传感器l))>幅度_阈值,或
时间(P-波1)-时间(P-2)|>时间_阈值,或
比率(竖直幅度对水平幅度)<P2S_阈值
如上所示,如果P波检测器已检测到P波,则可以对信号进行进一步的测试以过滤掉噪声。在一个实施方式中,因为P波是具体确定的冲击波,所以它将在信号中具有“触发器”、或时间点(points at time),软件已经独立地确定在这些点中有类似P波的一些东西。触发算法通常将是短期与长期的平均振幅的比率。如果在每个传感器中已检测到触发器,则时间延迟不应该超过某个阈值,例如对于100米的基线长度约50毫秒或更多。
另外,对于识别为P波的信号,可以对该波进行分析以确定竖直与水平的比率是否正确。也就是说,P波运动主要是竖直的,而S波主要是水平的,并且表面波可具有均匀的混合(Rayleigh波,这是大多数本地源传播的方式)。例如,P2S阈值可以是2,即,如果竖直通道不是水平通道的至少2倍,则它是本地源。
使用交叉相关对时间差的精确测量得益于较高的采样率。在优选实施方式中,使用至少100赫兹,例如至少200赫兹的采样率。当本地条件有利时(接近断层、坚硬的岩石地质),可以使用更高的采样率,如800赫兹或1000赫兹。人为噪声往往含有比地震振动更高的频率。较高的采样率使检测人为噪声更容易,除非使用非常积极的抗混叠输入滤波器,否则人为噪声可能会表现出混叠伪像。较高的频率采样降低了积极滤波器的成本和失真。
如果向量代表本地起源的波,并且未检测到P波,则振动应该被忽略。也就是说,根据通过如上所述的竖直-水平比率、时间延迟和向量相关性的结合所识别的本地源波应该被忽视。
对于来自地震源的振动,来自感测设备的信号应该是很好的相关的。如果相关性较低,则信号被拒绝。感测设备必须被相似地安装以实现对地面振动的相似响应。该系统采用来自所有地震事件的振动来评价可能的相关性程度以及调整其比较算法来补偿感测设备响应中的差异。这些技术还提供了对电气噪声的良好抑制,否则电气噪声可能会有助于增加误报。
所描述的技术中的许多都依赖于准确地估计本地参数,如P波速度。由于每个事件都由系统进行检测和测量,因此这些参数可以在事后分析中通过与其它站点的比较来测量。这些参数随后被调整以提高在评估P波中的系统精度。
返回参照图2,在来自本地源的振动已被消除并且P波被传感器子系统2检测到之后,来自检测到的P波的数据经由通信子系统10被发送到EWS中的其他设备和/或被发送到分析子系统35。
分析子系统
在图11中的数据流图中对分析子系统35进行了详细描述。分析子系统35有三个组成部分:(1)P-S关系45,其涉及建立在测量位置(即在传感器子系统2的位置)的地震事件的P波的一个或多个参数与在同一位置观测到的地面运动峰值之间的经验关系;(2)本地震中处理组件46,其涉及确定地震事件的震中;和(3)D-S关系49,其涉及建立在地面运动峰值与距震中的距离之间的经验关系。
P-S关系
如上所述,P-S关系涉及建立在测量位置的P波的一个或多个参数与在同一位置观测到的地面运动峰值之间的关系。该经验关系基于来自大量历史事件的地震数据,这些历史事件按照地理区域、深度、震源机制和必要的任何其他参数进行归类,或是合在一起被研究。P波参数包括在时域或频域中的振幅信息,以及在时域或频域中的P波的其他属性。地面运动峰值被表示为跃度(jerk)、加速度、速度、位移、或在宽带或任何感兴趣的频带内的谱加速度。经验关系的函数形式可以是线性的、对数线性的或任何其他形式。经验关系也可以是与源的距离的函数或其它变量的函数。这种关系被称为P-S关系。
在一个实施方式中,数据从感兴趣的区域内约100次先前地震中收集。地震震级跨度从ML3.0到最大的可用事件。因为需要高质量的地震记录,所以在分析中优选较近发生的地震。这种优选受发生在震级范围上端的事件的稀有性限制,并受到一些最大的事件比大多数较小的事件明显更早的必然性的限制。这是可以允许的,因为大事件的较强地面运动在噪声更大的记录上比来自小地震的地面运动可见。该数据集被选择,使得每个震级处的地震的数量大约是恒定的,以避免由于小震级数量多而使其比重过大。
对于每次地震,多个地震记录被分析,根据以下分类分析:距震中的距离、传感器的站点类别、以及在可能的情况下的站点相对于地震的主要分量向量的方位角。该后一种分类仅对大概MW4.0或以上的地震是可能的,已经为其计算了可靠的矩张量(moment tensors)。对于每个记录,P波在时域和频域中被分析,并且来自S波或表面波的地面运动峰值被记录。相关性在P波分析结果和地面运动峰值之间被计算,并且最佳相关性或组合的成套最佳相关性用来生成经验P-S关系。
图12示出了经验P-S关系的一个例子,其中峰值地面加速度(PGA)与P波的一些参数对数线性相关。曲线图上的每一点都是历史地震的该P波参数和PGA的个别观测值。实线54是对这些数据的最小二乘最佳拟合,而虚线55是该拟合的95%置信区间。图12示出了该P波参数的假设观测值按某些任意单位都等于10的图形化的例子。竖线56与最佳拟合和95%置信线54、55的交点产生了估计的PGA57和估计的PGA58的95%置信区间。
选择使用哪一个P波参数或参数的组合依赖于多种因素,包括参数对于震源机制和方向(即,走滑地震与冲断层与正常地震的对比)中的变化的稳健性、使用该参数能可靠地进行估计时的速度、以及该参数在感兴趣的整个强度范围内的可用性。在最基本的层面上,参数的选择将由与地面运动峰值最正相关并表现出最少散点的参数主导,即,其参数值的不确定性产生地面运动估计中的最小的不确定性的那些参数。因为单个参数不见得同时满足所有的要求,所以参数的组合可与使每个参数的益处最大化的权重方案组合使用。例如,基于振幅的参数可能会对小的地面运动表现出较少的散点,但对于非常大的地面运动表现出饱和的散点。相比之下,基于频率的参数可能不会遇到对于大的地面运动的饱和状态,但会遇到对于较小的地面运动的低的信噪比。在这个例子中,合适的方案对于较小的估计的地面运动将给予基于振幅的参数更多的权重,而对于大的估计将给予基于频率的参数更多的权重。
本地震中处理
在一些实施方式中,事件的震中使用仅来自单一的传感器子系统2的数据来确定。在其它实施方式中,震中使用来自本地传感器子系统2和来自通过网络(通过通信子系统10)通信的其它站点的数据的组合来确定。
在一些系统中,单个传感器可用于确定震中。在由两个水平轴组成的传感器的情况下,P波在两个通道上的第一运动的振幅和符号被组合作为向量的正交分量,并用于确定从传感器到震中的反方位角。在一个实施方式中,使用了三轴传感器,并且P波在竖直通道上的第一运动的振幅和符号被另外用于确定入射P波的倾角。该区域的一维速度模型被用来将测量的倾角转换成震中距。这可以与频率波数集成一起实时地进行。在一个实施方式中,速度模型用于生成在测得的倾角和震中距之间事先转换查找表。这种技术可以单独使用(即,仅使用一个传感器来确定震中),或者它可用于增进其它技术来更准确地确定震中位置。
在一个实施方式中,两个传感器位于具有已知的基线距离和方位的同一站点,并且第一运动的相对到达时间被用于通过以下方程式来估计反方位角:
其中θ为以弧度为单位的方位角,Vp是P波的本地表观速度,单位为米每秒,d为以米为单位的基线距离(在优选实施方式中为20到100米),且Δt是以秒为单位的两个传感器之间的时间延迟。从P波的第一运动测得的反方位角带有180°的模糊度,来自到达时间差的反方位角带有关于基线方位对称的模糊度。反方位角的这两个测量值被用于通过选择在方位角上彼此最接近的这两个测量值的分支来解决模糊度。3维速度模型,当一个是可用的时,用于生成由地震波的折射引起的反方位角的校正表。使用这种技术,具有两个或多个传感器位于其中(即,在500米的范围内,如在200米的范围内,例如在100米的范围内)的单一站点可以被用来确定震中—不需要其他站点。
图13示出了相隔某一距离d(23)的接收来自远处震源的冲击波的两个传感器位置(S1和S2)。冲击波沿射线路径21和22到达传感器。图14是用于估算如上所述的反方位角的方程式的图形化描绘,并示出了基于图13中的两个传感器处的到达时间差的交叉相关的角分辨率精度。该图用于相隔100米的两个传感器。
在一个实施方式中,Voronoi单元被构建在EWS中的所有操作站点周围,并且没有其他站点已经检测到地面运动的认知被用于将震源定位到本地Voronoi单元内。随着时间的推移以及没有其它站报告触发器,震中可以存在于其中的点的轨迹在到触发器的第一站周围被减少。这需要关于网络的健康状态、以及关于已经检测到地面运动所有周围的站的状态的持续信息。该信息每当一个或多个站的状态变化时由通信子系统10异步地提供。如果邻近的站被报告已经故障,则初始站的Voronoi单元被实时地重新计算,并且可能的震中的轨迹被更新以反映这种变化。
在一个实施方式中,本地震中处理组件46将地质地图本地地保留在Voronoi单元和邻近的单元内。这包括固定的数据以及可变的数据,固定的数据如已知的断层线的位置及其评估的地震灾害的位置,可变的数据如在Voronoi单元内的所有最近发生的地震的位置。这些数据与方位角和倾角数据相结合,并与Voronoi单元本身相结合,来生成震中的可能位置在两个维度(纬度/经度)中的概率分布。如果一个或多个邻近的站报告事件,则该信息在本地震中估计中被合并,并经由通信子系统被传送到网络的其余部分。
D-S关系
单独的经验关系被建立,其描绘了地面运动峰值随着与地震源的距离的变化。这种经验关系基于来自大量历史事件的地震数据,如果这种关系被发现在很大程度上依赖于这些参数的话,则这些历史事件根据地理区域、深度、震源机制和任何其他参数进行归类。如果与这些参数的关系中的变化与数据中的散点相比是比较小的,则这些事件作为总体被研究以达成统一的D-S关系。地面运动峰值以与上述对P波的经验关系相同的方式被表述。与震源、震中、断层面或表面断层迹的距离被描述。该经验关系可采取任何函数形式,但在距离为零处必须是明确有限的。这种关系被称为D-S关系。
在优选实施方式中,D-S的关系遵循如下理论函数形式:
PGM=A·C
其中,R是距表面断层迹的距离,R0是以断裂的长度为数量级的常数,A0是岩石的弹性变形极限,并且M、N和K是常数。M、N和K的值通过分析与用于P-S关系的相同的地面运动数据集而确定。这生成了一系列曲线,这些曲线根据断裂长度R0而改变。A是理论纯弹性介质的振幅,其在R=0时在理论上是无限的。由于岩石具有弹性变形极限,因此最终的振幅必须通过饱和常数C进行标度。这在距震源从零到无穷大的所有距离处产生了有限的解。
图15以图形的方式示出了图12中的假设观测值如何被用于估计在距震源的所有距离处的地面运动。如果用于图12中的假设站点被指明在距震源3公里的距离处,则带有95%置信区间的来自图12中的估计的PGA绘制为图13上的带有误差条69的空心符。D-S关系被按一定比例绘制以符合所估计的PGA70,并且95%的置信曲线被按一定比例绘制以符合PGA估计71中的95%的误差条。这些曲线正确地按一定比例绘制后,在任何其他距离处的估计的地面运动可从曲线图中读出。在这个例子中,在距震源62有100公里的站点处的PGA被估计为63,带有95%的置信区间64。
数据通过分析子系统的流动
返回参照图11,数据被实时地从传感器子系统2流出并馈送到P-S关系45和本地震中处理46中。来自通信子系统10的异步数据当其到达时也被馈送到本地震中处理中。P-S关系45生成在本地站点47处即将发生的地面运动峰值的概率分布,并且本地震中处理产生震中位置48的概率分布。如果震中位置已经根据来自网络的数据被估计出来,则该数据从通信子系统10被传递,并覆盖本地震中结果,并可以与本地结果进行比较,以评估不确定性。这些概率被各自地报告到通信子系统10,并且它们的信息被结合并被馈送到D-S关系49中,D-S关系49产生即将发生的地面运动峰值50的区域性曲线。该数据还被报告到通信子系统10中。
由于P-S关系和震中估计造成的估计的不确定性使用标准误差传播方法被传播到来自D-S关系的区域性曲线,标准误差传播方法在这里不再详细讨论。区域性曲线中的最终总的不确定性被传递到通信子系统10。
通信子系统
返回参照图2,通信子系统10负责在传感器子系统2之间和传感器子系统2与分析子系统35之间提供通信。
因此,本地和区域性地面运动和震中位置的估计被传递到通信子系统10,通信子系统10将这些估计按需分配到本地EWS、对等站点的区域性网络或分配到主数据中心,用于重新分配到区域性站点。通信子系统10还接收来自其他对等站点或来自主数据中心的数据,并将该数据按需传递到分析子系统35用于并入本地分析中。
本地和区域性地面运动中以及震中位置中的估计的不确定性被连续地记录并在分析子系统35内传播。不确定性来源于来自传感器子系统2和通信子系统10的输入数据的质量和一致性以及在P波和地面运动45之间的预定关系的内在不确定性的组合。不确定性从分析子系统35被传递到通信子系统10,通信子系统10将它们编码成一组参数值,用于在网络上传输。
通信子系统10可以包括用于发送和接收数据的系统(例如,以太网,无线网等)、用于对执行通信所使用的设备进行验证的模块、用于保护这些通信不受干扰的系统(如加密)、用于确保所有通信都成功完成的系统(协议)、和/或用来检测所通信的数据中的错误(ECC)的系统。
估计强度的概率表示
通信子系统10被配置为将震中和地面运动的概率分布作为具有不同数目的数据点的表或分段线性函数来通信。分段线性近似的一个可能的实施方式仅仅是将每一点处的概率传输降至概率函数所需的分辨率,即作为概率的栅格(raster)。这计算起来简单,但要传输很昂贵。在优选实施方式中,概率分布函数近似为高斯分布,并使用两个参数值(“度量”)进行编码,这两个参数值为:一个代表期望值(ev),而一个代表分布的偏差(dev)。在优选实施方式中,参数ev对分布均值进行编码,并且参数dev对标准偏差进行编码。其他的表示形式是可能的:dev可以对方差、半极大处全宽度、95%置信区间、或偏差的任何其他量度进行编码。在优选实施方式中,即将发生的地面运动峰值的概率分布由以下函数进行近似:
其中,PGM以线性或对数形式表示。
其他的概率函数是可能的。柯西(Cauchy)分布,其中ev对位置进行编码,并且dev对标度进行编码,遵循如下形式:
使用同样编码的拉普拉斯(Laplace)分布遵循如下形式:
非连续分布函数也是可接受的。例如,如果最大和最小的可能的地面运动是已知的(mn和mx),并且在那个区间上的地面运动强度的可能性被判断为是相等的(或者已知不足以生成更逼真的概率分布),则均匀的分布函数适用:
在简并的情况下,只要已知估计地面运动峰值,并且没有可用的不确定性,则概率就变成狄拉克(Dirac)δ函数:

在这种情况下,系统以与本技术的当前状态一样的方式表现,即表现为二进制警报。
当对震中位置进行编码时,相同的概率函数被扩展到两个维度。在作为高斯分布的实现方式中,这会导致四个度量:evlat、evlon、devlat和devlon。这不是多元高斯分布的最一般的情况。一般化的形式要求dev被表示为协方差矩阵。在该实现方式中,dev的分量被标记为devlat,lon、devlon,lon、devlon,lat、以及devlat,lat。这种形式被更有效地表示为沿主轴线的偏差,加上旋转角度:devl、dev2以及θ。后一种形式是优选实施方式。
通信
通信子系统10有利于在分析子系统和图1中所示的更广泛的EWS之间的异步通信。因此,通信子系统10包括至少一个单一的设备来解释地震警报,并将这些地震警报转换成适当的响应。在一种实现方式中,更广泛的EWS还包括区域性数据中心,该区域性数据中心通过互联网接收数据并将数据分配到地理上分布在感兴趣的区域中的相同的系统。该更广泛的EWS可以采取相同系统的对等网络的形式,而没有区域性数据中心。
除了在本地系统、区域性网络和一个或多个响应设备之间实现通信协议之外,通信子系统10负责对地面运动和震中位置的估计以及它们各自的不确定性进行编码以便通过网络高效地通信。
在一个实施方式中,当计算出的强度已经达到一定的阈值水平时,警报被发出。
Claims (90)
1.一种检测地震事件的方法,包括:
使用在测量位置处的至少一个传感器检测地震事件的主波;
使用所检测到的主波的至少一个参数来确定在所述测量位置处的估计峰值地面强度而不确定所述地震事件的震级;
确定所述地震事件的震中;以及
使用所确定的估计峰值地面强度和指定位置距所述震中的距离来估计所述地震事件在所述指定位置处的强度。
2.如权利要求1所述的方法,还包括如果所述地震事件的强度大于阈值则发出警报。
3.如权利要求2所述的方法,其中,所述发出警报包括将所述警报作为概率函数发出。
4.如权利要求3所述的方法,其中,使用代表期望值的一个参数和代表分布偏差的一个参数对所述概率函数进行编码。
5.如权利要求1或2所述的方法,其中,确定所述震中包括使用从所述至少一个传感器收集的信息和从另一测量位置处的传感器收集的信息,所述至少一个传感器和在所述另一测量位置处的传感器通过通信网络进行连接。
6.如权利要求1、2或5所述的方法,其中,使用所检测到的主波的至少一个参数来确定所述测量位置处的估计峰值地面强度包括:利用在所述至少一个参数和地面运动峰值之间建立的经验关系来确定所述地面运动峰值。
7.如权利要求6所述的方法,其中,所建立的经验关系基于先前的地震数据。
8.如权利要求1、2、5或6所述的方法,其中,所述至少一个参数
包括在时域或频域中的振幅信息。
9.如权利要求1、2、5、6或8所述的方法,其中,所述至少一个传感器包括加速度计、GPS传感器、位移传感器或速度传感器。
10.如权利要求1、2、5、6、8或9所述的方法,其中,估计所述地震事件在指定位置处的强度包括:使用在峰值地面强度与所述指定位置距所述震中的距离之间建立的经验关系。
11.如权利要求10所述的方法,其中,所建立的经验关系基于先前的地震数据。
12.如权利要求10所述的方法,其中,所述经验关系包括:
PGM=A·C
其中R是距表面断层迹线的距离,R0是具有断裂长度的量级的常数,A0是岩石的弹性变形极限,并且M、N和K是常数。
13.如权利要求10、11或12所述的方法,其中,所述经验关系能够被绘制成地面运动峰值随着距所述震中的距离而衰减的曲线。
14.如权利要求1、2、5、6、8、9或10所述的方法,其中,使用至少一个传感器检测地震事件的主波包括:使用第一传感器来获得第一信号和使用第二传感器来获得第二信号、对所述第一信号和所述第二信号进行相关、以及仅当所述相关的结果满足设定的阈值时才确定所述第一信号和所述第二信号对应于地震事件的主波。
15.如权利要求14所述的方法,其中,对所述第一信号和所述第二信号进行相关包括比较幅度、方向向量或到达的时间。
16.一种用于检测地震事件的系统,包括
至少两个传感器,所述至少两个传感器被配置为检测地震事件的主波;
控制器,所述控制器被配置为:
使用所检测到的主波的至少一个参数来确定估计峰值地面强度而不确定所述地震事件的震级;
确定所述地震事件的震中;以及
使用所确定的估计峰值地面强度和指定位置距所述震中的距离来估计所述地震事件在所述指定位置处的强度。
17.如权利要求16所述的系统,其中,所述控制器还被配置为如果所述地震事件的强度大于阈值则发出警报。
18.如权利要求17所述的系统,其中,所述控制器被配置为将所述警报作为概率函数发出。
19.如权利要求18所述的系统,其中,所述概率函数使用代表期望值的一个参数和代表分布偏差的一个参数进行编码。
20.如权利要求16或17所述的系统,其中,所述至少两个传感器在分隔的测量位置处,这些测量位置通过通信网络连接。
21.如权利要求16、17或20所述的系统,其中,所述控制器被配置为使用所检测到的主波的至少一个参数来通过使用在所述至少一个参数和地面运动峰值之间建立的用于确定地面运动峰值的经验关系来确定所述测量位置处的估计峰值地面强度。
22.如权利要求21所述的系统,其中,所建立的经验关系基于先前的地震数据。
23.如权利要求16、17、20或21所述的系统,其中,所述至少一个参数包括在时域或频域中的振幅信息。
24.如权利要求16、17、20、21或23所述的系统,其中,所述至少两个传感器中的至少一个是加速度计、GPS传感器、位移传感器或速度传感器。
25.如权利要求16、17、20、21、23或24所述的系统,其中,所述控制器被配置为通过使用在峰值地面强度与指定位置距所述震中的距离之间建立的经验关系来估计所述地震事件在所述指定位置处的强度。
26.如权利要求25所述的系统,其中,所建立的经验关系基于先前的地震数据。
27.如权利要求25或26所述的系统,其中,所述经验关系包括:
PGM=A·C
其中R是距表面断层迹线的距离,R0是具有断裂长度的量级的常数,A0是岩石的弹性变形极限,并且M、N和K是常数。
28.如权利要求25、26或27所述的系统,其中,所述经验关系能够被绘制成地面运动峰值随着距所述震中的距离而衰减的曲线。
29.如权利要求16、17、20、21、23、24或25所述的系统,其中,第一传感器被配置为获得第一信号,并且第二传感器被配置为获得第二信号,并且其中,控制器被配置为对所述第一信号和所述第二信号进行相关以及仅当所述相关的结果满足设定的阈值时确定所述第一信号和所述第二信号对应于地震事件的主波。
30.如权利要求29所述的系统,其中,所述控制器被配置为通过比较幅度、方向向量或到达的时间来对所述第一信号和所述第二信号进行相关。
31.一种检测地震事件的方法,包括:
使用测量位置处的至少两个传感器检测地震事件的主波,其中,所述至少两个传感器相距小于500米;
使用所检测到的主波的至少一个参数来确定在所述测量位置处的估计峰值地面强度;
仅使用在所述测量位置处的所述至少两个传感器来确定所述地震事件的震中;以及
使用所确定的估计峰值地面强度和指定位置距所述震中的距离估计所述地震事件在所述指定位置处的强度。
32.如权利要求31所述的方法,其中,所述至少两个传感器相距小于200米。
33.如权利要求32所述的方法,其中,所述至少两个传感器相距小于100米。
34.如权利要求31或32所述的方法,其中,还包括如果所述地震事件的强度高于阈值则发出警报。
35.如权利要求34所述的方法,其中,发出所述警报包括将所述警报作为概率函数发出。
36.如权利要求35所述的方法,其中,使用代表期望值的一个参数和代表分布偏差的一个参数对所述概率函数进行编码。
37.如权利要求31、32或34所述的方法,其中,所述至少两个传感器通过硬线通信网络进行连接。
38.如权利要求31、32、34或37所述的方法,其中,所述至少两个传感器中的至少一个包括加速度计、GPS传感器、位移传感器或速度传感器。
39.如权利要求31、32、34、37或38所述的方法,其中,使用至少两个传感器检测地震事件的主波包括:使用第一传感器来获得第一信号和使用第二传感器来获得第二信号、对所述第一信号和所述第二信号进行相关、以及仅当所述相关的结果满足设定的阈值时才确定所述第一信号和所述第二信号对应于地震事件的主波。
40.如权利要求39所述的方法,其中,对所述第一信号和所述第二信号进行相关包括比较幅度、方向向量或到达的时间。
41.如权利要求31、32、34、37、38或39所述的方法,其中,所述至少两个传感器是相同的。
42.如权利要求31、32、34、37、38、39或41所述的方法,其中,确定所述震中包括将所述震中确定为以纬度和经度表示的概率密度函数。
43.如权利要求42所述的方法,其中,使用代表以经纬度表示的期望值的一个参数、沿两个主轴线的偏差以及旋转角度对所述概率密度函数进行编码。
44.如权利要求42或43所述的方法,其中,使用方位角和倾角信息来确定所述概率密度函数。
45.如权利要求42、43或44所述的方法,还包括使用关于当地的地质情况的先前信息、区域中的其他测量位置的几何条件和其他测量位置的实时状态来调整所述概率密度函数。
46.一种用于检测地震事件的系统,包括:
至少两个传感器,其被配置为检测地震事件的主波,其中所述至少两个传感器相距小于500米;
控制器,所述控制器被配置为:
使用所检测到的主波的至少一个参数来确定估计峰值地面强度;
仅使用所述测量位置处的所述至少两个传感器来确定所述地震事件的震中;以及
使用所确定的估计峰值地面强度和指定位置距所述震中的距离估计所述地震事件在所述指定位置处的强度。
47.如权利要求46所述的系统,其中,所述至少两个传感器相距小于200米。
48.如权利要求47所述的系统,其中,所述至少两个传感器相距小于100米。
49.如权利要求46或47所述的系统,其中,所述控制器还被配置为如果所述地震事件的强度高于阈值则发出警报。
50.如权利要求49所述的系统,其中,所述控制器被配置为将所述警报作为概率函数发出。
51.如权利要求50所述的系统,其中,使用代表期望值的一个参数和代表分布偏差的一个参数对所述概率函数进行编码。
52.如权利要求46、47或49所述的系统,其中,所述至少两个传感器通过硬线通信网络进行连接。
53.如权利要求46、47、49或52所述的系统,其中,所述至少两个传感器中的至少一个包括加速度计、GPS传感器、位移传感器或速度传感器。
54.如权利要求46、47、49、52或53所述的系统,其中,第一传感器被配置为获得第一信号,并且第二传感器被配置为获得第二信号,并且其中,控制器被配置为对所述第一信号和所述第二信号进行相关、以及仅当所述相关的结果满足设定的阈值时才确定所述第一信号和所述第二信号对应于地震事件的主波。
55.如权利要求54所述的系统,其中,对所述第一信号和所述第二信号进行相关包括比较幅度、方向向量或到达的时间。
56.如权利要求46、47、49、52、53或54所述的系统,其中,所述至少两个传感器是相同的。
57.如权利要求46、47、49、52、53、54或56所述的系统,其中,所述控制器被配置为通过将所述震中确定为以纬度和经度表示的概率密度函数来确定所述震中。
58.如权利要求57所述的系统,其中,使用代表以经纬度表示的期望值的一个参数、沿两个主轴线的偏差以及旋转角度对所述概率密度函数进行编码。
59.如权利要求57或58所述的系统,其中,所述概率密度函数使用方位角和倾角信息来确定。
60.如权利要求57、58或59所述的系统,其中,所述控制器还被配置为使用关于当地的地质情况的先前信息、区域中的其他测量位置的几何条件和其他测量位置的实时状态来调整所述概率密度函数。
61.一种用于检测地震事件的主波的方法,包括:
从第一位置处的第一传感器获得第一地面振动信号;
从第二位置处的第二传感器获得第二地面振动信号,所述第二位置在所述第一位置的500米的范围内;
对所述第一信号和所述第二信号进行相关;以及
仅当所述第一信号和所述第二信号的所述相关的结果满足设定的阈值时,使用所述第一信号或所述第二信号的至少一个参数来估计地震事件的强度。
62.如权利要求61所述的方法,其中,所述第一传感器或所述第二传感器中的至少一个是加速度计、速度传感器或位移传感器。
63.如权利要求61或62所述的方法,其中,对所述第一信号和所述第二信号进行相关包括计算所述第一信号和所述第二信号的方向向量的差,并且其中,满足所述设定的阈值包括小于设定的差。
64.如权利要求61或62所述的方法,其中,对所述第一信号和所述第二信号进行相关包括计算所述第一信号和所述第二信号的交叉相关峰值,并且其中,满足所述设定的阈值包括低于设定值。
65.如权利要求61或62所述的方法,其中,对所述第一信号和所述第二信号进行相关包括计算所述第一信号和所述第二信号之间的时间延迟,并且其中,满足所述设定的阈值包括小于设定的差。
66.如权利要求61或62所述的方法,其中,对所述第一信号和所述第二信号进行相关包括计算所述第一信号和所述第二信号的幅度的差,并且其中,满足所述设定的阈值包括小于设定的差。
67.如权利要求61、62、63、64、65或66所述的方法,还包括以超过100赫兹的采样率获得第一信号和第二信号。
68.如权利要求67所述的方法,其中,所述采样率超过200赫兹。
69.如权利要求68所述的方法,其中,所述采样率为至少800赫兹。
70.如权利要求61、62、63、64、65、66或67所述的方法,还包括如果所述地震事件的强度高于阈值则发出警报。
71.如权利要求70所述的方法,其中,发出所述警报包括将所述警报作为概率函数发出。
72.如权利要求71所述的方法,其中,使用代表期望值的一个参数和代表分布偏差的一个参数对所述概率函数进行编码。
73.如权利要求61、62、63、64、65、66、67或70所述的方法,其中,实时地、连续地重复所述获得的步骤和所述进行相关的步骤。
74.如权利要求61、62、63、64、65、66、67、70或73所述的方法,其中,所述至少两个传感器相距小于200米。
75.如权利要求61、62、63、64、65、66、67、70、73或75所述的方法,其中,所述至少两个传感器相距小于100米。
76.一种用于检测地震事件的系统,包括:
在第一位置处的第一传感器,所述第一传感器被配置为获得第一地面振动信号;
在第二位置处的第二传感器,所述第二位置在所述第一位置的500米范围内,且所述第二传感器被配置为获得第二地面振动信号;以及
控制器,所述控制器被配置为:
对所述第一信号和所述第二信号进行相关;以及
仅当所述第一信号和所述第二信号的所述相关的结果满足设定的阈值时,使用所述第一信号或所述第二信号的至少一个参数来估计地震事件的强度。
77.如权利要求76所述的系统,其中,所述第一传感器或所述第二传感器中的至少一个是加速度计、速度传感器、或位移传感器。
78.如权利要求76或77所述的系统,其中,所述控制器被配置为通过计算所述第一信号和所述第二信号的方向向量的差来对所述第一信号和所述第二信号进行相关,并且其中,满足所述设定的阈值包括小于设定的差。
79.如权利要求76或77所述的系统,其中,所述控制器被配置为通过计算所述第一信号和所述第二信号的交叉相关峰值来对所述第一信号和所述第二信号进行相关,并且其中,满足所述设定的阈值包括低于设定值。
80.如权利要求76或77所述的系统,其中,所述控制器被配置为通过计算所述第一信号和所述第二信号之间的时间延迟来对所述第一信号和所述第二信号进行相关,并且其中,满足所述设定的阈值包括小于设定的差。
81.如权利要求76或77所述的系统,其中,所述控制器被配置为通过计算所述第一信号和所述第二信号的幅度的差来对所述第一信号和所述第二信号进行相关,并且其中,满足所述设定的阈值包括小于设定的差。
82.如权利要求76、77、78、79、80或81所述的系统,其中,所述第一传感器和所述第二传感器被配置为以超过100赫兹的采样率获得所述第一信号和所述第二信号。
83.如权利要求82所述的系统,其中,所述采样率超过200赫兹。
84.如权利要求83所述的系统,其中,所述采样率为至少800赫兹。
85.如权利要求76、77、78、79、80、81或82所述的系统,其中,所述控制器还被配置为如果所述地震事件的强度高于阈值则发出警报。
86.如权利要求85所述的系统,其中,所述控制器被配置为将所述警报作为概率函数发出。
87.如权利要求86所述的系统,其中,使用代表期望值的一个参数和代表分布偏差的一个参数对所述概率函数进行编码。
88.如权利要求76、77、78、79、80、81、82或85所述的系统,其中,所述传感器被配置为实时地重复所述获得的步骤,并且所述控制器被配置为实时地重复所述进行相关的步骤。
89.如权利要求76、77、78、79、80、81、82、85或89所述的系统,其中,所述至少两个传感器相距小于200米。
90.如权利要求89所述的系统,其中,所述至少两个传感器相距小于100米。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201061424165P | 2010-12-17 | 2010-12-17 | |
| US201061424175P | 2010-12-17 | 2010-12-17 | |
| US201061424193P | 2010-12-17 | 2010-12-17 | |
| US61/424,193 | 2010-12-17 | ||
| US61/424,175 | 2010-12-17 | ||
| US61/424,165 | 2010-12-17 | ||
| PCT/US2011/065733 WO2012083294A2 (en) | 2010-12-17 | 2011-12-19 | Earthquake warning system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN103460073A true CN103460073A (zh) | 2013-12-18 |
Family
ID=46245413
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2011800683328A Pending CN103460073A (zh) | 2010-12-17 | 2011-12-19 | 地震警报系统 |
Country Status (12)
| Country | Link |
|---|---|
| US (1) | US9372272B2 (zh) |
| EP (1) | EP2652529A4 (zh) |
| JP (2) | JP2014503818A (zh) |
| CN (1) | CN103460073A (zh) |
| AU (1) | AU2011343454B2 (zh) |
| CA (1) | CA2821718A1 (zh) |
| CL (1) | CL2013001751A1 (zh) |
| MX (1) | MX2013006837A (zh) |
| NZ (2) | NZ612013A (zh) |
| PE (1) | PE20140367A1 (zh) |
| TW (1) | TWI557695B (zh) |
| WO (1) | WO2012083294A2 (zh) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104964666A (zh) * | 2015-06-01 | 2015-10-07 | 山东鼎成卫星导航定位技术有限公司 | 一种基于虚拟加速度的gnss变形监测方法及系统 |
| CN107193038A (zh) * | 2017-05-25 | 2017-09-22 | 王建衡 | 跨断裂带水平形变地震监测器 |
| CN107422368A (zh) * | 2016-05-23 | 2017-12-01 | 韩国地质资源研究院 | 通过强制关联相邻观测站的信息而防止地震早期预警系统发出错误预警的震中位置确定方法 |
| TWI620154B (zh) * | 2017-04-11 | 2018-04-01 | 楊偉智 | 使用者裝置、地震警報伺服器及其地震警報方法 |
| CN108490481A (zh) * | 2018-05-18 | 2018-09-04 | 惠安县金建达电子科技有限公司 | 一种用于地质领域的地下经纬度监测装置 |
| CN110688773A (zh) * | 2019-10-14 | 2020-01-14 | 中国电建集团成都勘测设计研究院有限公司 | 一种流域堵塞快速定位的系统及方法 |
| CN113406699A (zh) * | 2021-07-13 | 2021-09-17 | 武汉大学 | 一种基于单一矩形模型的地震震源快速确定方法及系统 |
| CN114721049A (zh) * | 2022-03-11 | 2022-07-08 | 新疆维吾尔自治区地震局 | 一种虚拟地震台方位角参加偏网地震定位方法 |
| CN114993461A (zh) * | 2022-08-08 | 2022-09-02 | 成都久和建设设备有限责任公司 | 一种塔机机构电机振动的检测系统和方法 |
| CN115867829A (zh) * | 2020-07-13 | 2023-03-28 | 通用电气可再生能源西班牙有限公司 | 包括风力涡轮的系统和用于操作该系统的方法 |
Families Citing this family (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2652529A4 (en) * | 2010-12-17 | 2017-12-13 | Seismic Warning Systems, Inc. | Earthquake warning system |
| JP5819446B2 (ja) | 2011-02-26 | 2015-11-24 | サイズミック・ワーニング・システムズ・インコーポレイテッド | カスタマイズ可能なポリシーエンジン |
| US9465121B2 (en) * | 2011-08-19 | 2016-10-11 | National Applied Research Laboratories | System and method for on-site instant seismic analysis |
| CN103033844A (zh) * | 2012-12-12 | 2013-04-10 | 中国地震局地震研究所 | 单站地震p波检测预警仪 |
| US9558644B2 (en) * | 2013-03-15 | 2017-01-31 | Vivint, Inc. | Security system with earthquake detection |
| JP6124253B2 (ja) * | 2013-03-18 | 2017-05-10 | 国立研究開発法人防災科学技術研究所 | 地震動計測装置、それを用いた地震動計測システム及び地震計特性決定方法 |
| ES2913339T3 (es) * | 2014-01-31 | 2022-06-01 | Draka Elevator Products Inc | Dispositivo sensor de detección sísmica para equipo de transporte vertical |
| TWI636276B (zh) * | 2014-05-16 | 2018-09-21 | 財團法人國家實驗研究院 | 人工智能地震判斷方法及地震偵測系統 |
| JP6347480B2 (ja) * | 2014-05-27 | 2018-06-27 | 独立行政法人石油天然ガス・金属鉱物資源機構 | 振動検出システム、信号処理装置及び信号処理方法 |
| JP6401003B2 (ja) * | 2014-10-02 | 2018-10-03 | 公益財団法人鉄道総合技術研究所 | 単独観測点の地震波を用いた近距離地震に対する早期警報方法 |
| US20160209532A1 (en) * | 2014-11-17 | 2016-07-21 | Board Of Regents, The University Of Texas System | Applied interpolation techniques |
| TWI541770B (zh) * | 2015-01-08 | 2016-07-11 | 財團法人國家實驗研究院 | 地震警報廣播設備及相關方法 |
| WO2017083556A1 (en) * | 2015-11-11 | 2017-05-18 | The Regents Of The University Of California | Myshake: smartphone-based earthquake early warning system |
| US10740684B1 (en) * | 2015-12-09 | 2020-08-11 | One Concern, Inc. | Method and system to predict the extent of structural damage |
| US10915829B1 (en) | 2015-12-09 | 2021-02-09 | One Concern, Inc. | Data model update for structural-damage predictor after an earthquake |
| US11004001B1 (en) | 2015-12-09 | 2021-05-11 | One Concern, Inc. | Analysis of structural-damage predictions caused by an earthquake to identify areas with high damage levels |
| US10909647B2 (en) | 2015-12-09 | 2021-02-02 | One Concern, Inc. | Damage data propagation in predictor of structural damage |
| WO2018072030A1 (en) | 2016-10-19 | 2018-04-26 | Weir-Jones Engineering Consultants Ltd. | Systems and methods for early warning of seismic events |
| TWI661214B (zh) * | 2016-11-29 | 2019-06-01 | National Applied Research Laboratories | 自動化校正地盤特性之現地型地震預警系統及相關方法 |
| CN106982258B (zh) * | 2017-04-06 | 2018-02-23 | 厦门帝嘉科技有限公司 | 地震预警系统 |
| JP6887310B2 (ja) * | 2017-05-23 | 2021-06-16 | 株式会社ミエルカ防災 | 地震警報システム |
| WO2019130181A1 (en) * | 2017-12-26 | 2019-07-04 | Ramot At Tel-Aviv University Ltd. | Real-time array-based seismic source location |
| US11119453B2 (en) * | 2018-03-09 | 2021-09-14 | Nishil Thomas Koshy | System and method for remote non-intrusive monitoring of assets and entities |
| CL2018002014A1 (es) * | 2018-07-24 | 2018-09-14 | Xancura Spa | Sistema y método de alerta de tiempo estimado de llegada y de intensidad esperada en una zona determinada, producto de un movimiento sísmico. |
| IT201800011084A1 (it) * | 2018-12-14 | 2019-03-14 | Ignazio Congiu | Sistema per segnalare l'imminente verificarsi di eventi sismici |
| US10520103B1 (en) | 2019-01-04 | 2019-12-31 | Mohammad Taghi Fatehi | Intelligent retrofit seismic wave detector and valve shutoff device |
| US10876277B1 (en) | 2019-01-04 | 2020-12-29 | Mohammad Taghi Fatehi | Automatic seismic wave detector and valve controller |
| KR102448079B1 (ko) * | 2020-11-16 | 2022-09-27 | 주식회사 동일아이씨티 | 실시간 지진동 판별 방법 |
| JP7527255B2 (ja) | 2020-12-02 | 2024-08-02 | 大成建設株式会社 | 複数のセンサー間での時刻同期方法 |
| DE102020215422A1 (de) | 2020-12-07 | 2022-06-09 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren und Steuereinheit zum Betreiben eines Frühwarnsystems für Gefahren, sowie Fahrzeug und Frühwarnsystem |
| JP7109120B1 (ja) | 2021-12-06 | 2022-07-29 | 株式会社ミエルカ防災 | 地震動を検出するための検出装置及びその検出結果に基づいて地震動の強度を予測するための予測装置 |
| CN114509811B (zh) * | 2022-01-28 | 2022-12-02 | 中国地震局地球物理研究所 | 一种基于深度学习的单台站后方位角估计方法与装置 |
| TWI812132B (zh) * | 2022-03-30 | 2023-08-11 | 財團法人國家實驗研究院 | 高功率地震波預警方法及系統、電腦可讀取的記錄媒體 |
| TWI849508B (zh) * | 2022-09-16 | 2024-07-21 | 衛波科技股份有限公司 | 複數地震儀之時序與能量交集判斷地震方法 |
| CN117765689B (zh) * | 2024-02-22 | 2024-05-10 | 山东光合云谷大数据有限公司 | 一种地质灾害监测预警系统 |
| CN118379862B (zh) * | 2024-06-24 | 2024-08-20 | 济宁矿业集团有限公司霄云煤矿 | 基于煤矿事故灾害特征匹配的风险预警方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4516206A (en) * | 1982-10-21 | 1985-05-07 | Mcevilly Thomas V | Post-processing of seismic parameter data based on valid seismic event determination |
| US5724241A (en) * | 1996-01-11 | 1998-03-03 | Western Atlas International, Inc. | Distributed seismic data-gathering system |
| US20050027571A1 (en) * | 2003-07-30 | 2005-02-03 | International Business Machines Corporation | Method and apparatus for risk assessment for a disaster recovery process |
| JP2006078297A (ja) * | 2004-09-09 | 2006-03-23 | Railway Technical Res Inst | 早期計測震度予測方法及びそのための装置 |
| CN1991930A (zh) * | 2005-12-27 | 2007-07-04 | 三丰株式会社 | 地震灾害防止系统 |
| US20090033511A1 (en) * | 2007-07-31 | 2009-02-05 | Nec Corporation | Earthquake noticing server, earthquake noticing system, earthquake noticing method, and program |
| JP2010091480A (ja) * | 2008-10-09 | 2010-04-22 | Ohbayashi Corp | 長周期地震動検知器、長周期地震動検知方法 |
Family Cites Families (53)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3707699A (en) * | 1970-08-07 | 1972-12-26 | Del Mar Eng Lab | Remote scoring system for bombing or rocket range |
| JPS5247341B1 (zh) * | 1970-12-29 | 1977-12-01 | ||
| JPS6014316B2 (ja) * | 1980-07-01 | 1985-04-12 | 日本国有鉄道 | 地震早期検知警報システム |
| JPS608468B2 (ja) * | 1980-09-25 | 1985-03-02 | 日本国有鉄道 | 地震早期検知警報システム |
| USH374H (en) * | 1987-02-09 | 1987-11-03 | The United States Of America As Represented By The Secretary Of The Army | Optimum multiple target detection and resolution |
| US5101195A (en) * | 1988-12-15 | 1992-03-31 | Quakeawake Corporation | Discriminating earthquake detector |
| JPH02228584A (ja) * | 1989-03-02 | 1990-09-11 | Nippon Mining Co Ltd | 移動物体検出方式および装置 |
| JP2636656B2 (ja) | 1993-01-26 | 1997-07-30 | 鹿島建設株式会社 | 制震あるいは免震効果表示装置 |
| US5771170A (en) * | 1994-02-14 | 1998-06-23 | Atlantic Richfield Company | System and program for locating seismic events during earth fracture propagation |
| US5983162A (en) * | 1996-08-12 | 1999-11-09 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Computer implemented empirical mode decomposition method, apparatus and article of manufacture |
| US5910763A (en) | 1997-02-18 | 1999-06-08 | Flanagan; John | Area warning system for earthquakes and other natural disasters |
| JP3377169B2 (ja) * | 1997-10-13 | 2003-02-17 | 日本鋼管株式会社 | 埋設鋼管の塗膜損傷位置検出方法及び装置 |
| US6208247B1 (en) | 1998-08-18 | 2001-03-27 | Rockwell Science Center, Llc | Wireless integrated sensor network using multiple relayed communications |
| GB9906995D0 (en) * | 1998-09-16 | 1999-05-19 | Geco Prakla Uk Ltd | Seismic detection apparatus and related method |
| JP2000121743A (ja) | 1998-10-14 | 2000-04-28 | Osaka Gas Co Ltd | 地震動分布の評価方法 |
| US6816878B1 (en) | 2000-02-11 | 2004-11-09 | Steven L. Zimmers | Alert notification system |
| US6654689B1 (en) | 2000-11-06 | 2003-11-25 | Weather Central, Inc. | System and method for providing personalized storm warnings |
| JP4253435B2 (ja) | 2000-11-30 | 2009-04-15 | 東京電力株式会社 | 地震動の強さ推定方法及びその装置 |
| JP3718642B2 (ja) * | 2001-06-12 | 2005-11-24 | エタニ電機株式会社 | 音響機器、音響空間、電気信号伝送線路等の伝達特性測定方法 |
| JP3463677B2 (ja) | 2001-10-04 | 2003-11-05 | 独立行政法人防災科学技術研究所 | 震源位置の決定法 |
| US6731220B2 (en) | 2002-04-02 | 2004-05-04 | Industrial Technology Research Institute | Strong shaking judgment device and method |
| US7196634B2 (en) * | 2002-04-10 | 2007-03-27 | Science Horizons, Inc. | Systems for predicting earthquakes and methods of employing such systems |
| EP1540616B1 (en) | 2002-08-30 | 2015-01-21 | Seismic Warning Systems, Inc. | Sensor apparatus and method for detecting earthquake generated p- waves and generating a responsive control signal |
| KR200324722Y1 (ko) | 2003-04-16 | 2003-08-27 | 장병화 | 자동기상관측을 통한 재난 경보 및 생활정보 제공 시스템 |
| JPWO2005022198A1 (ja) | 2003-08-27 | 2006-10-26 | Necモバイリング株式会社 | 地震予知方法およびそのシステム |
| JP2005195366A (ja) | 2003-12-26 | 2005-07-21 | Matsushita Electric Ind Co Ltd | 地震情報送受信システム |
| JP2006112922A (ja) * | 2004-10-14 | 2006-04-27 | Toshiba Corp | 緊急地震速報装置および緊急地震速報方法 |
| DE202004018276U1 (de) * | 2004-11-25 | 2005-03-24 | Lachenit Heinrich | Erdbebenvorwarnsystem |
| US7463162B1 (en) | 2005-03-21 | 2008-12-09 | Jamshid Hosseini | Earthquake alarm system |
| JP2006284200A (ja) * | 2005-03-31 | 2006-10-19 | Railway Technical Res Inst | 極小アレイによる早期地震検知システム |
| US7353114B1 (en) | 2005-06-27 | 2008-04-01 | Google Inc. | Markup language for an interactive geographic information system |
| US7280920B1 (en) * | 2005-06-29 | 2007-10-09 | Whiteside Lowell S | Method and apparatus for forecasting earthquakes and making informed risk management decisions |
| US20070104028A1 (en) * | 2005-11-04 | 2007-05-10 | Dirk-Jan Van Manen | Construction and removal of scattered ground roll using interferometric methods |
| JP2007198813A (ja) * | 2006-01-25 | 2007-08-09 | Matsushita Electric Works Ltd | 震度計 |
| JP4980645B2 (ja) | 2006-05-01 | 2012-07-18 | 東海旅客鉄道株式会社 | 直下型地震用地震計、地震計システム、直下型地震用地震警報発令方法、及びプログラム |
| JP4994781B2 (ja) * | 2006-10-18 | 2012-08-08 | 株式会社産業機電 | 集合住宅インターホン連携システム |
| US8022819B2 (en) | 2007-03-13 | 2011-09-20 | Swiss Reinsurance Company | Electronic control apparatus and method for controlling alarm systems of cellular structure |
| TWI335003B (en) | 2007-05-18 | 2010-12-21 | Nat Applied Res Laboratories | Earthquake warning system and method |
| JP5009076B2 (ja) * | 2007-07-30 | 2012-08-22 | 鹿島建設株式会社 | 地震早期警報システム |
| US20100207776A1 (en) * | 2007-09-21 | 2010-08-19 | Shinji Takuno | Communication device |
| JP5073515B2 (ja) * | 2008-01-24 | 2012-11-14 | ラピスセミコンダクタ株式会社 | 地震防災システム |
| WO2009111394A1 (en) | 2008-03-02 | 2009-09-11 | Thomas Gorman | Severe weather, environmental and mass notification warning system and method |
| CN101577036B (zh) | 2008-07-10 | 2010-11-17 | 王振宇 | 地震报警器 |
| CN101354757B (zh) | 2008-09-08 | 2010-08-18 | 中国科学院地理科学与资源研究所 | 一种精细尺度下的动态风险及易损性预测方法 |
| US20100169021A1 (en) | 2008-12-31 | 2010-07-01 | Nokia Corporation | Earthquake detection apparatus, system, and method |
| JP5126143B2 (ja) | 2009-03-26 | 2013-01-23 | 大成建設株式会社 | 地震動の予測システム |
| US8125852B2 (en) | 2009-05-25 | 2012-02-28 | Schlumberger Technology Corporation | Methods and systems for seismic signal detection |
| JP4510128B1 (ja) | 2009-05-29 | 2010-07-21 | 株式会社エイツー | 地震判定システム及び地震解析方法 |
| CN101567124B (zh) | 2009-06-04 | 2012-05-02 | 山东省科学院海洋仪器仪表研究所 | 一种海洋灾害预警方法 |
| CN101630011A (zh) | 2009-08-10 | 2010-01-20 | 南阳师范学院 | 基于虚拟仪器的地震监测与报警器 |
| CN101996470A (zh) | 2009-08-11 | 2011-03-30 | 融智信科技发展(北京)有限公司 | 基于mems加速度计的无线地震警报 |
| US8519860B2 (en) | 2010-04-09 | 2013-08-27 | Weather Decision Technologies | Multimedia alerting |
| EP2652529A4 (en) * | 2010-12-17 | 2017-12-13 | Seismic Warning Systems, Inc. | Earthquake warning system |
-
2011
- 2011-12-19 EP EP11848827.9A patent/EP2652529A4/en not_active Withdrawn
- 2011-12-19 TW TW100147138A patent/TWI557695B/zh not_active IP Right Cessation
- 2011-12-19 US US13/993,394 patent/US9372272B2/en not_active Expired - Fee Related
- 2011-12-19 MX MX2013006837A patent/MX2013006837A/es active IP Right Grant
- 2011-12-19 WO PCT/US2011/065733 patent/WO2012083294A2/en active Application Filing
- 2011-12-19 CN CN2011800683328A patent/CN103460073A/zh active Pending
- 2011-12-19 NZ NZ612013A patent/NZ612013A/en not_active IP Right Cessation
- 2011-12-19 JP JP2013544867A patent/JP2014503818A/ja active Pending
- 2011-12-19 PE PE2013001433A patent/PE20140367A1/es not_active Application Discontinuation
- 2011-12-19 CA CA2821718A patent/CA2821718A1/en not_active Abandoned
- 2011-12-19 AU AU2011343454A patent/AU2011343454B2/en not_active Ceased
- 2011-12-19 NZ NZ709456A patent/NZ709456A/en not_active IP Right Cessation
-
2013
- 2013-06-17 CL CL2013001751A patent/CL2013001751A1/es unknown
-
2016
- 2016-08-10 JP JP2016157382A patent/JP2016194530A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4516206A (en) * | 1982-10-21 | 1985-05-07 | Mcevilly Thomas V | Post-processing of seismic parameter data based on valid seismic event determination |
| US5724241A (en) * | 1996-01-11 | 1998-03-03 | Western Atlas International, Inc. | Distributed seismic data-gathering system |
| US20050027571A1 (en) * | 2003-07-30 | 2005-02-03 | International Business Machines Corporation | Method and apparatus for risk assessment for a disaster recovery process |
| JP2006078297A (ja) * | 2004-09-09 | 2006-03-23 | Railway Technical Res Inst | 早期計測震度予測方法及びそのための装置 |
| CN1991930A (zh) * | 2005-12-27 | 2007-07-04 | 三丰株式会社 | 地震灾害防止系统 |
| US20090033511A1 (en) * | 2007-07-31 | 2009-02-05 | Nec Corporation | Earthquake noticing server, earthquake noticing system, earthquake noticing method, and program |
| JP2010091480A (ja) * | 2008-10-09 | 2010-04-22 | Ohbayashi Corp | 長周期地震動検知器、長周期地震動検知方法 |
Non-Patent Citations (4)
| Title |
|---|
| LI SHANYOU,SONG JINDONG: "A NEW MAGNITUDE ESTIMATION METHOD BASED ON PREDOMINANT PERIOD AND PEAK AMPLITUDE", 《THE 14TH WORLD CONFERENCE ON EARTHQUAKE ENGINEERING》, 17 October 2008 (2008-10-17), pages 1 - 7 * |
| TOSHIKAZU ODAKA ET AL.: "A New Method of Quickly Estimating Epicentral Distance and Magnitude from a Single Seismic Record", 《BULLETIN OF THE SEISMOLOGICAL SOCIETY OF AMERICA》, vol. 93, no. 1, 28 February 2003 (2003-02-28), pages 526 - 532 * |
| YIH-MIN WU ET AL.: "用初至P波确定震级:单台方法", 《世界地震译丛》, no. 6, 31 December 2007 (2007-12-31), pages 43 - 48 * |
| 孔庆凯,赵鸣: "地震预警系统中的算法研究", 《灾害学》, vol. 25, no. 0, 31 October 2010 (2010-10-31), pages 305 - 308 * |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104964666B (zh) * | 2015-06-01 | 2017-07-14 | 山东鼎成卫星导航定位技术有限公司 | 一种基于虚拟加速度的gnss变形监测方法及系统 |
| CN104964666A (zh) * | 2015-06-01 | 2015-10-07 | 山东鼎成卫星导航定位技术有限公司 | 一种基于虚拟加速度的gnss变形监测方法及系统 |
| CN107422368A (zh) * | 2016-05-23 | 2017-12-01 | 韩国地质资源研究院 | 通过强制关联相邻观测站的信息而防止地震早期预警系统发出错误预警的震中位置确定方法 |
| CN107422368B (zh) * | 2016-05-23 | 2019-06-04 | 韩国地质资源研究院 | 通过强制关联相邻观测站的信息而防止地震早期预警系统发出错误预警的震中位置确定方法 |
| CN108924733B (zh) * | 2017-04-11 | 2020-09-22 | 杨伟智 | 使用者装置、地震警报伺服器及其地震警报方法 |
| TWI620154B (zh) * | 2017-04-11 | 2018-04-01 | 楊偉智 | 使用者裝置、地震警報伺服器及其地震警報方法 |
| CN108924733A (zh) * | 2017-04-11 | 2018-11-30 | 杨伟智 | 使用者装置、地震警报伺服器及其地震警报方法 |
| CN107193038A (zh) * | 2017-05-25 | 2017-09-22 | 王建衡 | 跨断裂带水平形变地震监测器 |
| CN108490481A (zh) * | 2018-05-18 | 2018-09-04 | 惠安县金建达电子科技有限公司 | 一种用于地质领域的地下经纬度监测装置 |
| CN110688773A (zh) * | 2019-10-14 | 2020-01-14 | 中国电建集团成都勘测设计研究院有限公司 | 一种流域堵塞快速定位的系统及方法 |
| CN115867829A (zh) * | 2020-07-13 | 2023-03-28 | 通用电气可再生能源西班牙有限公司 | 包括风力涡轮的系统和用于操作该系统的方法 |
| CN113406699A (zh) * | 2021-07-13 | 2021-09-17 | 武汉大学 | 一种基于单一矩形模型的地震震源快速确定方法及系统 |
| CN113406699B (zh) * | 2021-07-13 | 2022-04-29 | 武汉大学 | 一种基于单一矩形模型的地震震源快速确定方法及系统 |
| CN114721049A (zh) * | 2022-03-11 | 2022-07-08 | 新疆维吾尔自治区地震局 | 一种虚拟地震台方位角参加偏网地震定位方法 |
| CN114721049B (zh) * | 2022-03-11 | 2024-04-09 | 新疆维吾尔自治区地震局 | 一种虚拟地震台方位角参加偏网地震定位方法 |
| CN114993461A (zh) * | 2022-08-08 | 2022-09-02 | 成都久和建设设备有限责任公司 | 一种塔机机构电机振动的检测系统和方法 |
| CN114993461B (zh) * | 2022-08-08 | 2022-11-04 | 成都久和建设设备有限责任公司 | 一种塔机机构电机振动的检测系统和方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2652529A4 (en) | 2017-12-13 |
| US20130328688A1 (en) | 2013-12-12 |
| NZ612013A (en) | 2015-07-31 |
| CA2821718A1 (en) | 2012-06-21 |
| TWI557695B (zh) | 2016-11-11 |
| NZ709456A (en) | 2017-01-27 |
| PE20140367A1 (es) | 2014-03-22 |
| JP2014503818A (ja) | 2014-02-13 |
| CL2013001751A1 (es) | 2014-01-31 |
| AU2011343454A1 (en) | 2013-07-04 |
| TW201248562A (en) | 2012-12-01 |
| US9372272B2 (en) | 2016-06-21 |
| WO2012083294A2 (en) | 2012-06-21 |
| WO2012083294A3 (en) | 2012-10-26 |
| JP2016194530A (ja) | 2016-11-17 |
| EP2652529A2 (en) | 2013-10-23 |
| AU2011343454B2 (en) | 2015-07-30 |
| MX2013006837A (es) | 2014-02-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103460073A (zh) | 地震警报系统 | |
| Stachnik et al. | Determination of New Zealand ocean bottom seismometer orientation via Rayleigh-wave polarization | |
| Nayak et al. | Distributed acoustic sensing using dark fiber for array detection of regional earthquakes | |
| CN103293512B (zh) | 使用本地波传播模型定位 | |
| CN102129063A (zh) | 一种微震源或声发射源的定位方法 | |
| US20190162812A1 (en) | System and method for determining the source location of a firearm discharge | |
| JP2007071707A (ja) | リアルタイム地震情報を利用した地震動強さの予測方法および防災システム | |
| JP5126143B2 (ja) | 地震動の予測システム | |
| JP6103516B2 (ja) | 津波警報システム、津波警報方法、及び津波警報システム用のプログラム | |
| JP6644970B2 (ja) | 観測システム | |
| CN103529482A (zh) | 一种高精度确定载体动态加速度的方法 | |
| Wu et al. | Deep water acoustic range estimation based on an ocean general circulation model: Application to PhilSea10 data | |
| Farghal et al. | The potential of using fiber optic distributed acoustic sensing (DAS) in earthquake early warning applications | |
| CN103123398B (zh) | 用于使p波反虚反射的设备和方法 | |
| JP6099123B2 (ja) | 地震識別装置、それを用いた地震識別システム及び地震識別方法 | |
| CN102939548B (zh) | 确定放置于海底的探测器的位置的方法 | |
| JPH01242985A (ja) | マグマの状態変化検出方法 | |
| KR101780123B1 (ko) | 위성항법시스템에 의한 지진 감시 장치 및 방법 | |
| TW201706965A (zh) | 地震警告系統 | |
| RU2376614C1 (ru) | Способ восстановления параметров смещения дна в зоне источника цунами | |
| KR101715898B1 (ko) | 현장 지진 발생 이벤트의 교차 검증을 통한 지진 조기 오경보 회피방법 및 그 시스템 | |
| JP2006105862A (ja) | リアルタイム地震危険度予測の方法 | |
| JP7109120B1 (ja) | 地震動を検出するための検出装置及びその検出結果に基づいて地震動の強度を予測するための予測装置 | |
| Insua et al. | Advancing tsunami detection: The ocean networks Canada tsunami project | |
| RU2462734C1 (ru) | Способ обнаружения возможности наступления катастрофических явлений |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| REG | Reference to a national code |
Ref country code: HK Ref legal event code: DE Ref document number: 1192621 Country of ref document: HK |
|
| WD01 | Invention patent application deemed withdrawn after publication | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20131218 |
|
| REG | Reference to a national code |
Ref country code: HK Ref legal event code: WD Ref document number: 1192621 Country of ref document: HK |