CN102700513A - 带有移动暂存架的换电机器人及换电方法 - Google Patents
带有移动暂存架的换电机器人及换电方法 Download PDFInfo
- Publication number
- CN102700513A CN102700513A CN2012102234207A CN201210223420A CN102700513A CN 102700513 A CN102700513 A CN 102700513A CN 2012102234207 A CN2012102234207 A CN 2012102234207A CN 201210223420 A CN201210223420 A CN 201210223420A CN 102700513 A CN102700513 A CN 102700513A
- Authority
- CN
- China
- Prior art keywords
- battery box
- battery
- electric machine
- machine people
- logic controller
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/80—Exchanging energy storage elements, e.g. removable batteries
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/04—Programme control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/05—Programmable logic controllers, e.g. simulating logic interconnections of signals according to ladder diagrams or function charts
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Manipulator (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
本发明涉及一种带有移动暂存架的换电机器人及换电方法,它包括机械部分和电气控制部分;电气控制部分控制电池更换装置一次性取换电公交车一侧所需的全部电池箱置于所述电池箱暂存货架上,水平移动单元移动至待换电位置,通过电池箱更换装置从电动公交车取下乏电池箱,电池箱更换装置绕Y轴向一侧旋转,举升或下降置乏电池箱到电池箱暂存货架上;再将电池箱暂存货架上充完电的电池箱取下后,旋转回位,安装电池箱到电动公交车内,如此重复操作,完成电动公交车的电池箱更换。本发明一次性取电动公交车一侧所需电池箱的数量,避免了换电机器人大空间内远距离重复操作,结构简洁,缩短了换电时间,降低了工作区域的空间占用率,有效地提高了土地资源的利用率。
Description
技术领域:
本发明涉及一种电池箱更换机器人,尤其是一种带有移动暂存架的换电机器人及换电方法。
背景技术:
随着电动汽车充换电技术的成熟和电动汽车大规模的推广使用,电动汽车将逐渐成为中国汽车工业和能源发展的重点。目前的电动汽车能量补给主要分为充电与换电两种,充电存在等待时间长等缺陷,为了解决电动汽车的续航里程,就目前的发展形式,电动车的换电方案可行性程度更高。
就电动公交车换电而言,受单箱电池容量的限制,往往采用多电池箱组合来供给电能,由于电池箱自身重量大,数量多,给电池箱的更换带来了一定的困难,电池箱的更换成为电动公交车产业化发展的技术难题。为了解决这一技术难题,需要一种电池箱快速更换系统,在7—8分钟内完成电池组的全部更换。
目前,国内相关企业机构对电动公交车的电池箱更换系统有一定的研究:
中国专利CN 101284524A提出了一种利用换电机构旋转180°的方式,以解决电池箱的更换问题,但是,这种方式存在行程远,作业空间大,运行时间长等不足之处;
中国专利200820078476.7“一种用于车载电池更换系统的定位装置”、中国专利200410090796.0“一种电动公交车系统”等,所描述的装置应用也存在着诸多问题,如:有些设计方案只是处于理论阶段,更换电池箱定位次数多,更换电池箱时间长;换电设备的可扩展性较差,不同车辆的电池箱不能应用同一种换电设备;相关换电设备的高度受限,不能满足大规模集中式换电站的需求;
中国专利CN 101890942A占地面积大,需多个机器人或机构相互配合完成换电任务。
现有技术取得了一定的进展,但仍存在以下问题:
(1)、控制复杂,故障率和维护成本高。
现有的电池箱更换方式都是采用多种机器人、多结构、多配合、多定位、多重复方式完成电池箱更换,这种更换方式必然将导致整个换电系统占地面积大、定位精度要求高、更换时间长、复杂性程度高等问题。由于整个换电过程,需要多种机构通过复杂的配合来完成,使故障率和维护成本相应提高,不利于电动汽车的推广。
(2)、换电时间长,换电效率低;
由于换电机器人一次只能运送更换一个电池箱,自身不能将待更换的电池箱置于其附近,而是需要不断的移动位置在电池箱存放架与待换电车辆之间反复交替更换,随着机器人行程的延伸,换电时间将越来越长,从而严重影响了换电效率的提高,给电动汽车的推广造成了障碍。
(3)、如果采用多电池箱一次运输的方案,换电机器人重量体积都较大,如何解决换电机器人大惯量的精确控制,如何提高大重量的换电机器人的换电可靠性和效率,现有技术无法解决这些问题。
发明内容:
本发明的目的就在于解决以上技术问题,提供了一种带有移动暂存架的换电机器人及换电方法,它将多种换电机器人间协同配合完成的换电任务集成到一个机器人上,换电机器人本体上安装电池箱暂存架,将待换电的电池箱全部置于电池箱暂存架上,从而有效地缩短了机器人换电时的行程,不仅使得机构精简化,缩短了多种换电机器人或机构间的配合时间和工作行程时间,使得原来多种机器人多结构、多配合、多定位、多重复的工作方式改为了一步式到位,利用速度规划解决了换电机器人大惯量的精确控制问题,换电机器人在换电过程中,能够实现多轴联动,更进一步提高了换电设备的可靠性和更换效率。
为实现上述目的,本发明采用如下技术方案:
一种带有移动暂存架的换电机器人,它包括机械部分和电气控制部分,其中:
机械部分包括在X、Y、Z三个直角坐标方向运动的水平移动单元、承重单元、载物平台单元;所述载物平台单元中部镂空,电池箱更换装置安装在镂空位置的中间部位;水平移动单元上还设有主控台;
在所述水平移动单元至少一侧设置电池箱暂存货架,电池箱更换装置在电气控制部分控制下,一次性取所需的全部充好电的电池箱,并置电池箱于电池箱暂存货架上,移动至待换电位置;从车辆上取下乏电池箱,置乏电池箱到电池箱暂存货架上,将电池箱暂存货架上充好电的电池箱取下后,安装到相应位置,如此重复几次操作,完成电池箱更换。
所述水平移动单元包括两侧均设有至少一组滚轮,滚轮安装在下横梁两侧与地轨配合;所述地轨呈若干列均匀分布,在地轨端部设有限位撞块;同时所述滚轮与电机减速机相连,所述电机减速机设置在下横梁上并与水平运动伺服电机连接;水平运动伺服电机则与电气控制部分连接。
所述承重单元主要由上横梁和两根立柱组成龙门式结构,所述上横梁上设有两组横向导向轮,两组横向导向轮之间夹有安装在充电货架上的天轨;天轨上安装有用于设备取电的滑触线槽和用于水平方向工位寻址的水平认址片;所述升降装置为两立柱设有的一组伺服电机驱动的绞盘,绞盘上缠绕钢丝绳,载物平台单元设有支架与钢丝绳的下端连接;在至少一根立柱上设有竖直方向寻址的纵向认址片用于纵向的方向识别。
所述载物平台单元包括载物台,载物台中部镂空,电池箱更换装置安装在镂空的中间部位;载物台的两侧设有支架,在支架内侧上设有多组纵向导向轮,在支架外侧设有与承重单元相配合的多个限位轮。
所述电池箱更换装置包括水平旋转平台,它为圆形板,圆形板通过齿轮减速机构与水平旋转伺服驱动电机连接;在圆形板上设有工作面,在工作面上设有电池箱推送机构,所述电池箱推送机构上设有支撑横梁,支撑横梁与电池箱托盘连接;电池箱推送机构则包括至少两条平行的导向轨道、电池箱推送机构驱动电机电池箱驱动机构以及电磁推手,电池箱驱动机构为齿轮齿条机构;电池箱推送机构驱动电机与电磁推手分别与各自设有的齿轮齿条机构连接,电磁推手的推手工作面上安有两块圆形电磁吸盘,分布于工作面两端,位置与电池箱上两圆形铁块相对应;所述电磁推手的推手工作面还设有与电池内箱上的锁紧装置相配合的解锁机构;所述导向轨道设置在电池箱推送机构上表面;所述导向轨道与电池箱相匹配,所述电池箱为将电池成组放置的箱体;所述支撑横梁两端各设有至少一个超声波测距传感器;水平旋转伺服驱动电机、电池箱推送机构驱动电机、电磁吸盘以及所述各传感器均与电气部分连接。
所述齿轮减速机构包括:相互啮合的大齿轮和小齿轮以及减速器,大齿轮与圆形板连接,小齿轮与减速器输出轴连接,减速器则与水平旋转伺服电机连接,水平旋转伺服电机与电气部分连接。
所述解锁机构为解锁电机驱动的拨叉状结构,设置分布于电磁推手工作面两端,配合打开充电架或换电车上的电池内箱上的锁紧装置。
电气控制部分包括主控计算机系统、PLC逻辑控制器、限位开关、急停开关、伺服电机、伺服驱动器、电机编码器、超声波传感器、色标传感器、光电传感器、DMP位置传感器、无线通讯模块I、无线通讯模块II。所述主控计算机系统包括工控机及触摸屏,所述工控机上通过串口连接无线通讯模块I;
所述PLC逻辑控制器与伺服驱动器、急停开关、超声波传感器、色标传感器、光电传感器、DMP位置传感器电连接,与主控计算机系统通过串口通讯,对机器人的运动进行逻辑控制。
所述超声波传感器与PLC逻辑控制器电连接,用于检测电磁推手与电池箱之间的距离;
所述色标传感器与PLC逻辑控制器电连接,用于检测电池的锁止状态;
所述DMP位置传感器与PLC逻辑控制器电连接,用于检测电磁推手与电池箱充电架上和车体电池箱仓处的反光板之间的偏差,将偏差数据反馈至PLC控制电磁推手调整姿态以准确抓取和安装电池箱。
所述光电传感器与PLC逻辑控制器电连接,结合寻址片使用,用于对机器人在X轴方向和Y方向的运动定位和实现X、Y方向运动的加减速控制,实现大惯量机器人高速的精确控制。
所述急停开关与PLC逻辑控制器电连接,用于在机器人出现紧急情况的紧急停止。
所述动力驱动机构包括5个伺服驱动器,所述5个电机的伺服驱动器分别与水平移动单元,载物平台单元和承重单元、水平旋转平台的伺服电机连接,所述的各伺服电机的轴上设有编码器,编码器的信号输出端与PLC逻辑控制器连接;同时在水平移动单元,载物平台单元和承重单元中工作零点定位处设有限位开关,限位开关与PLC逻辑控制器连接;
所述无线通讯模块I和无线通讯模块II分别于主控计算机系统的工控机和无线摇杆上,用于二者之间数据的无线传输。
一种带有移动暂存架的换电机器人的换电方法:
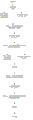
1)初始化:系统上电后,通过主控计算机系统或主控台或无线遥控装置下发复位指令,带有移动暂存架的换电机器人的各个轴触发限位开关后寻零,回到原点位置;
取充电货架单元上的电池箱:PLC逻辑控制器根据接收的充满电的电池箱的坐标沿X、Y轴运动至坐标点位置,水平旋转平台旋转+180°或-180°,依据DMP位置传感器、超声波传感器信号调整电池箱托盘姿态,载物平台单元中电磁推手上的电磁吸盘将充电架货架上充好的电池箱取下来;水平旋转平台旋转+90°或-90°,PLC逻辑控制器根据存储的坐标点和光电传感器控制换电机器人,依据DMP位置传感器、超声波传感器信号调整电池箱托盘姿态,准确的将电池箱送入电池箱暂存货架上,重复过程,取车辆一侧所需的全部电池箱,所需电池箱装满电池箱暂存货架后,换电机器人沿x轴移动,同时,水平旋转装置沿y轴自动旋转到换电初始状态。
2)卸换电车辆电池箱:车辆安全停靠指定换电区域后,换电机器人根据存储的坐标点信息通过主控计算机系统或换电机器人主控台或无线遥控装置水平移动到指定的作业点,依据DMP位置传感器、超声波传感器信号调整电池箱托盘姿态,准确的将电池托盘伸到与车体电池仓平齐对接的位置;同时,将水平旋转平台的旋转角度位置信号送至PLC逻辑控制器存储,根据色标传感器反馈信号判断并确认是否解锁完成,解锁成功之后,利用载物平台单元中电磁推手上的电磁吸盘将电池从车体的电池仓中取出,水平旋转平台旋转+90°或-90°位置信号送至PLC逻辑控制器存储,PLC逻辑控制器根据存储的坐标点和光电传感器控制换电机器人,依据DMP位置传感器、超声波传感器信号调整电池托盘姿态,准确的将电池箱送入暂存电池箱货架上;
3)安装电池:PLC逻辑控制器控制换电机器人旋转到车体电池仓的位置,根据存储的水平旋转平台调整电池托盘的姿态,将电池箱安装到电池仓中,依据色标传感器检测信号判断并确认锁止完成,PLC逻辑控制器控制电磁吸盘失电,电磁吸盘与电池脱离,电磁推手沿载物台缩回固定,单箱电池换电完成;重复过程,直至更换所有乏电池,移动暂存式换电机器人回到原点待机。
本发明的有益效果是:
1、将换电过程中多种机器人、多机构协同配合完成的工作任务集中到一个机器人上,换电机器人至少一侧带有电池箱暂存架,能够一次性取电动公交车一侧所需电池箱的数量置于自身之上,避免了换电机器人大空间内远距离重复操作,缩短了换电时间。
2、换电时间短,换电效率高。换电机器人在换电过程中能够实现多轴联动,水平移动单元与水平旋转装置同时动作,缩短了换电时间,提高了换电效率。
3、利用速度规划解决了大惯量精确控制问题。
换电机器人的光电传感器与PLC逻辑控制器电连接,结合寻址片使用,用于对机器人在X轴方向和Y方向的运动定位和实现X、Y方向运动的加减速控制,实现大惯量机器人高速的精确控制。
本发明带移动暂存架换电机器人使整个换电流程时间更短,机构更精简,效率高,降低了工作区域的空间占用率,有效地提高了土地资源的利用率;换电机器人能够按动力公交车电池位置进行姿态调整,自动识别以及快速、准确、安全的对电动公交车电池进行更换,换电过程定位精度高、相对位移量小、位置准确,实现对不同种类电动公交车动力电池箱的快速更换。
附图说明:
图1为本发明换电系统结构示意图;
图2为本发明带有移动暂存架的换电机器人示意图;
图3为本发明的换电机器人载物平台后视结构示意图;
图4为本发明载物平台单元;
图5电池箱暂存货架示意图;
图6为本发明换电机器人控制系统示意图;
图7为本发明主控台示意图。
图8为换电流程示意图。
其中1、带有移动暂存架的换电机器人,2、充电货架单元,3、换电公交车,101、水平移动单元,102、承重单元,103、载物平台单元,4、地轨,5、限位撞块,6、支架,7、滚轮,8、下横梁,9、主控台,10、载物台,11、解锁机构,12、电池箱暂存货架,14、减速器,15、天轨,16、上横梁,17、立柱,18、横向导向轮,19、电池箱推送机构,20、支撑横梁,21、水平旋转平台,22、导向轨道,23、电池箱驱动机构,24、电池箱推送机构驱动伺服电机,25、电磁推手,26、电磁吸盘,27、超声波传感器,28. 纵向导向轮,501.主控计算机系统, 502. PLC逻辑控制器,503.限位开关,504. 伺服电机,505.伺服驱动器,506.电机编码器,507.急停开关,508.超声波传感器,509.色标传感器,510.光电传感器,511.DMP位置传感器,512.无线通讯模块I, 513无线通讯模块II。
具体实施方式:
下面结合附图与实施例对本发明作进一步说明。
如图1所示,它包括充电电池箱置于上部的充电货架单元2,与充电货架单元2相配合的带有移动暂存架的换电机器人1,带有移动暂存架的换电机器人1沿充电货架单元2长度方向运动;带有移动暂存架的换电机器人1从充电货架单元2上一次性取电动公交车一侧所需的全部电池箱,沿X轴方向移动到电动公交车换电位置,通过多个传感器的相互配合,从电动公交车取下需更换的乏电池,带有移动暂存架的换电机器人1旋转+90°或-90°,将乏电池放置到的电池箱暂存货架12上,依据PLC逻辑控制器502存储坐标距离上升或下降,将电池箱暂存货架12上已充电电池箱取下后,旋转+90°或-90°回位,通过多个传感器调节到更换位置完成电动公交车的电池箱更换。
图2表示本发明带有移动暂存架的换电机器人结构示意图,图中机械部分设有的水平移动单元101,载物平台单元103和承重单元102,水平移动单元101包括两侧均具有轮缘的滚轮7,与下横梁8相连接的地轨4,所述地轨4端部设有限位撞块5,所述滚轮7与电机减速器14相连,所述减速器14设置在下横梁8上并与水平运动伺服电机连接。
承重单元102设置在水平移动单元101上部,载物平台单元103与所述承重单元102连接,载物平台单元103上包括设有的载物台10以及其上设有电池箱更换装置,电池箱更换装置包括电池箱驱动机构23,电池箱驱动机构23上设置有电池箱推送机构19;
电气控制部分包括:与主控计算机系统501连接的数据采集装置、动力驱动机构,无线通信模块I 512,动力驱动机构与机械部分中的水平移动单元101、承重单元102和载物平台单元103、电池箱更换装置中的传动装置连接;
承重单元102主要由上横梁16和两根立柱17组成龙门式结构,所述上横梁16上设有两组横向滚轮18,所述两组横向滚轮18之间夹有安装在充电货架上的天轨15;所述天轨15上安装有用于设备取电的滑触线槽和用于水平方向工位寻址的水平认址片;所述两根立柱17中一侧立柱设有一组伺服电机驱动的绞盘,将绞盘上缠绕钢丝绳,钢丝绳的下端连接于载物平台单元103的支架6顶端;一根立柱上设有竖直方向寻址的纵向认址片用于纵向的方向识别。
图3、4中,所述电池箱驱动机构23包括设置在载物台10的水平旋转平台21,载物台10侧面下面设有电池箱推送机构19,所述电池箱推送机构19上设有支架横梁20;支架横梁20与设电池箱托盘连接。图4中,载物台10两端设有支架6,所述支架6上设有多组纵向导向轮28。
所述的电池箱推送机构19包括导向轨道22、电池箱推送机构驱动伺服电机24以及电磁推手25;电池箱推送机构驱动伺服电机24与电磁推手25分别与各自设有的齿轮齿条机构连接,电磁推手25的推手工作面上安有两块圆形电磁吸盘26,分布于工作面两端,位置与电池内箱上两圆形铁块相对应;所述电磁推手25的推手工作面还设有与电池内箱上的锁紧装置相配合的解锁机构11。所述导向轨道22设置在电池箱推送机构19上表面;
所述解锁机构11为解锁电机驱动拨叉状结构,设置分布于电磁推手25工作面两端,用与配合打开充电架或换电车上的电池内箱上的锁紧装置;
支架横梁20两端各设有一个超声波传感器27;
图6中,电气系统包括:主控计算机系统501、PLC逻辑控制器502、限位开关503、5个电机的伺服驱动器505、电机编码器506、急停开关 507、超声波传感器508、色标传感器509、光电传感器510、DMP位置传感器511。其中:
主控计算机系统501包括工控机和软件系统,主机采用X86系列工控机,windows XP操作系统,主控软件系统采用Visual C++语言编写,软件实现多线程事务处理,操作人员可以用触摸屏对主控计算机进行操作;
西门子PLC 300型逻辑控制器是整个控制系统的核心部件,通过无线网络与主控计算机系统501进行通信,通过对超声波传感器508、色标传感器509、光电传感器510、DMP位置传感器511信号的信号综合判断对各相应驱动电机进行控制。
数据采集装置为超声波传感器508、光电传感器510、色标传感器509、DMP位置传感器511。
超声波传感器508、色标传感器509、DMP位置传感器511安装在电磁推手25上,光电传感器510安装在上横梁16和立柱17上,用于对机器人X轴和y轴方向的定位。
限位开关503用于每个运动轴的参考机械零点。每个伺服驱动器505可以监控相对应的伺服电机504的运行电流、电机堵转或超过额定负载时能够向控制器报警。当系统出现故障时,运动控制系统能够对故障状态自主的进行判断处理,并将故障内容上报上位机监控系统。急停开关507主要是对设备运行中的紧急情况进行急停,优先级为第一位。
带有移动暂存架换电机器人的电池箱驱动机构23上包括的支架横梁20、水平旋转平台21、电池箱推送机构19,电池箱推送机构19通过电池箱推送机构驱动电机来驱动。
所述限位开关503与PLC逻辑控制器502连接,分别设置在水平移动单元,载物平台单元103和承重单元102中工作零点定位处,且与对应的各伺服电机504接触连接。
主控台9包括柜体,所述柜体内底部装有工控机,柜体正面上半部设有电阻式触摸屏,柜体背面安装有无线通信模块II513,所述柜体上触摸屏的下方安装有运行状态指示灯和急停按钮,所述电阻式触摸屏和无线通信模块II513与工控机相连,所述运行状态指示灯和急停按钮通过电平转换电路板与工控机相连;
柜体背面设有柜体门,柜体门上设有防雨锁;
工控机通过VGA接口与电阻式触摸屏相连接;
无线通信模块II513通过网口与工控机通信;
无线通信模块II513以及无线通信模块I512采用WiFi的IEEE 802.11标准的无线网络或CDMA模块或EDGE模块。
主控计算机系统501还可设有无线遥控装置,所述无线遥控装置包括壳体,在所述的壳体上设有总开关、两个二维摇杆、启动按钮、停止按钮、伺服控制器上电按钮;壳体内设有主控板和无线通信模块II513;所述的总开关、两个二维摇杆、启动按钮、停止按钮、伺服控制器上电按钮、无线通信模块II513与主控板连接;所述主控板将二维摇杆的方向信息转换成电信号,通过无线通信模块II513收发指令控制换电机器人的运动;所述的壳体上设有状态指示灯,所述的状态指示灯和主控板连接;所述的壳体上设有急停按钮,所述的急停按钮和主控板连接;所述的壳体上设有备用按钮;
上位机设有无线通讯模块I512,所述无线通讯模块I512与遥控装置无线通信模块 II513无线通讯。
一种带有移动暂存架的换电机器人的换电方法,包括以下步骤:
1)初始化:系统上电后,通过主控计算机系统501或主控台或无线遥控装置下发复位指令,带有移动暂存架的换电机器人的各个轴触发限位开关503后寻零,回到原点位置;
取充电货架单元上的电池箱:PLC逻辑控制器502根据接收的充满电的电池箱的坐标控制换电机器人沿X,Y轴方向运动至坐标点位置,水平旋转平台21旋转+180°或-180°,依据DMP位置传感器511、超声波传感器508信号调整电池托盘姿态,载物平台单元103中电磁推手25上的电磁吸盘26将充电货架单元2充满的电池箱取下来,水平旋转平台21旋转+90°或-90°,PLC逻辑控制器502根据存储的坐标点和光电传感器510控制换电机器人,依据DMP位置传感器511、超声波传感器508信号调整电池箱托盘姿态,准确的将电池箱送入暂存电池箱货架12上,重复过程,取车辆一侧所需的全部电池箱,所需电池箱装满电池箱暂存货架后,换电机器人沿X轴移动,同时,水平旋转装置沿Y轴旋转到换电初始状态。
2)卸换电车辆乏电池:车辆安全停靠指定换电区域后,带有移动暂存架的换电机器人1根据存储的坐标点信息通过主控计算机系统501或机器人主控台或无线遥控装置水平移动到指定的作业点,依据DMP位置传感器511、超声波传感器508信号调整电池箱托盘姿态,准确的将电池托盘伸到与车体电池仓平齐对接的位置,同时,将水平旋转平台21的旋转角度位置信号送至PLC逻辑控制器502存储,根据色标传感器509反馈信号判断并确认是否解锁完成,解锁成功之后,利用载物平台单元103中电磁推手25上的电磁吸盘26将电池从车体的电池仓中取出,水平旋转平台21旋转+90°或-90°位置信号送至PLC逻辑控制器存储502,PLC逻辑控制器502根据存储的坐标点和光电传感器510控制移动换电机器人,依据DMP位置传感器511、超声波传感器I508信号调整电池托盘姿态,准确的将电池箱送入电池箱暂存货架12上;
3)安装电池:PLC逻辑控制器502控制移动换电机器人旋转到车体电池仓的位置,根据存储的水平旋转平台21调整电池箱托盘的姿态,将电池箱安装到电池仓中,依据色标传感器509检测信号判断并确认锁止完成,PLC逻辑控制器502控制电磁吸盘26失电,电磁吸盘26与电池箱脱离,电磁推手沿载物台10缩回固定,单箱电池箱换电完成;重复过程,直至更换所有乏电池箱,带有移动暂存的换电机器人回到原点待机。
上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,所属领域技术人员应该明白,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
Claims (10)
1.一种带有移动暂存架的换电机器人,它包括机械部分和电气控制部分,其中:
所述机械部分包括在X、Y、Z三个直角坐标方向运动的水平移动单元、承重单元、载物平台单元;所述载物平台单元中部镂空,电池箱更换装置安装在镂空位置的中间部位;水平移动单元上还设有主控台;
在所述水平移动单元至少一侧设置电池箱暂存货架,电池箱更换装置在电气控制部分控制下,一次性取所需的全部充好电的电池箱,并置电池箱于电池箱暂存货架上,移动至待换电位置;从车辆上取下乏电池箱,置乏电池箱到电池箱暂存货架上,将电池箱暂存货架上充好电的电池箱取下后,安装到相应位置,如此重复几次操作,完成电池箱更换。
2.如权利要求1所述的带有移动暂存架的换电机器人,其特征是,所述水平移动单元的两侧均设有至少一组滚轮,滚轮安装在下横梁两侧与地轨配合;所述地轨呈若干列均匀分布,在地轨端部设有限位撞块;同时所述滚轮与电机减速机相连,所述电机减速机设置在下横梁上并与水平运动伺服电机连接;水平运动伺服电机则与电气控制部分连接。
3.如权利要求1所述的带有移动暂存架的换电机器人,其特征是,所述承重单元主要由上横梁和两根立柱组成龙门式结构,所述上横梁上设有两组横向导向轮,两组横向导向轮之间夹有安装在充电货架上的天轨;天轨上安装有用于设备取电的滑触线槽和用于水平方向工位寻址的水平认址片;所述升降装置为两立柱设有的一组伺服电机驱动的绞盘,绞盘上缠绕钢丝绳,载物平台单元设有支架与钢丝绳的下端连接;在至少一根立柱上设有竖直方向寻址的纵向认址片用于纵向的方向识别。
4.如权利要求1所述的带有移动暂存架的换电机器人,其特征是,所述载物平台单元包括载物台,载物台中部镂空,电池箱更换装置安装在镂空的中间部位;载物台的两侧设有支架,在支架内侧上设有多组纵向导向轮,在支架外侧设有与承重单元相配合的多个限位轮。
5.如权利要求1所述的带有移动暂存架的换电机器人,其特征是,所述电池箱更换装置包括水平旋转平台,它为圆形板,圆形板通过齿轮减速机构与水平旋转伺服驱动电机连接;在圆形板上设有工作面,在工作面上设有电池箱推送机构,所述电池箱推送机构上设有支撑横梁,支撑横梁与电池箱托盘连接;电池箱推送机构则包括至少两条平行的导向轨道、电池箱推送机构驱动电机电池箱驱动机构以及电磁推手,电池箱驱动机构为齿轮齿条机构;电池箱推送机构驱动电机与电磁推手分别与各自设有的齿轮齿条机构连接,电磁推手的推手工作面上安有两块圆形电磁吸盘,分布于工作面两端,位置与电池箱上两圆形铁块相对应;所述电磁推手的推手工作面还设有与电池内箱上的锁紧装置相配合的解锁机构;所述导向轨道设置在电池箱推送机构上表面;所述导向轨道与电池箱相匹配,所述电池箱为将电池成组放置的箱体;所述支撑横梁两端各设有至少一个超声波测距传感器;水平旋转伺服驱动电机、电池箱推送机构驱动电机、电磁吸盘以及所述各传感器均与电气部分连接。
6.如权利要求5所述的带有移动暂存架的换电机器人,其特征是,所述齿轮减速机构包括:相互啮合的大齿轮和小齿轮以及减速器,大齿轮与圆形板连接,小齿轮与减速器输出轴连接,减速器则与水平旋转伺服电机连接,水平旋转伺服电机与电气部分连接。
7.如权利要求1所述的带有移动暂存架的换电机器人,其特征是,所述电气控制部分包括主控计算机系统、PLC逻辑控制器、限位开关、急停开关、伺服电机、伺服驱动器、电机编码器、超声波传感器、色标传感器、光电传感器、DMP位置传感器、无线通讯模块I、无线通讯模块II;
所述主控计算机系统包括工控机及触摸屏,所述工控机上通过串口连接无线通讯模块I;
所述PLC逻辑控制器与伺服驱动器、急停开关、超声波传感器、色标传感器、光电传感器、DMP位置传感器电连接,与主控计算机系统通过串口通讯,对机器人的运动进行逻辑控制。
8.如权利要求7所述的带有移动暂存架的换电机器人,其特征是,所述超声波传感器与PLC逻辑控制器电连接,用于检测电磁推手与电池箱之间的距离;
所述色标传感器与PLC逻辑控制器电连接,用于检测电池的锁止状态;
所述DMP位置传感器与PLC逻辑控制器电连接,用于检测电磁推手与电池箱充电架上和车体电池箱仓处的反光板之间的偏差,将偏差数据反馈至PLC控制电磁推手调整姿态以准确抓取和安装电池箱;
所述光电传感器与PLC逻辑控制器电连接,结合寻址片使用,用于对机器人在X轴方向和Y方向的运动定位;
所述急停开关与PLC逻辑控制器电连接,用于在机器人出现紧急情况的紧急停止。
9.如权利要求7所述的带有移动暂存架的换电机器人,其特征是,所述动力驱动机构包括5个伺服驱动器,所述5个电机的伺服驱动器分别与水平移动单元,载物平台单元和承重单元、水平旋转平台的伺服电机连接,所述的各伺服电机的轴上设有编码器,编码器的信号输出端与PLC逻辑控制器连接;同时在水平移动单元,载物平台单元和承重单元中工作零点定位处设有限位开关,限位开关与PLC逻辑控制器连接;
所述无线通讯模块I和无线通讯模块II分别于主控计算机系统的工控机和无线摇杆上,用于二者之间数据的无线传输。
10.一种采用权利要求1-9任一所述的带有移动暂存架的换电机器人的换电方法,其特征是,具体步骤为:
1)初始化:系统上电后,通过主控计算机系统或主控台或无线遥控装置下发复位指令,带有移动暂存架的换电机器人的各个轴触发限位开关后寻零,回到原点位置;
取电池箱:PLC逻辑控制器根据接收的充满电的电池箱的坐标沿X、Y轴运动至坐标点位置,依据DMP位置传感器、超声波传感器信号调整电池箱托盘姿态,将充电架货架上充好的电池箱取下来;水平旋转平台旋转90度,PLC逻辑控制器根据存储的坐标点和光电传感器控制换电机器人,依据DMP位置传感器、超声波传感器信号调整电池箱托盘姿态,准确的将电池箱送入电池箱暂存货架上,重复过程,取车辆一侧所需的全部电池箱;
2)卸电池:车辆安全停靠指定换电区域后,换电机器人根据存储的坐标点信息通过主控计算机系统或换电机器人主控台或无线遥控装置水平移动到指定的作业点,依据DMP位置传感器、超声波传感器信号调整电池箱托盘姿态,准确的将电池托盘伸到与车体电池仓平齐对接的位置;同时,将水平旋转平台的旋转角度位置信号送至PLC逻辑控制器存储,根据色标传感器反馈信号判断并确认是否解锁完成,解锁成功之后,利用载物平台单元中电磁推手上的电磁吸盘将电池从车体的电池仓中取出,水平旋转平台旋转位置信号送至PLC逻辑控制器存储,PLC逻辑控制器根据存储的坐标点和光电传感器控制换电机器人,依据DMP位置传感器、超声波传感器信号调整电池托盘姿态,准确的将电池箱送入暂存电池箱货架上;
3)安装电池:PLC逻辑控制器控制换电机器人旋转到车体电池仓的位置,根据存储的水平旋转平台调整电池托盘的姿态,将电池箱安装到电池仓中,依据色标传感器检测信号判断并确认锁止完成,PLC逻辑控制器控制电磁吸盘失电,电磁吸盘与电池脱离,电磁推手沿载物台缩回固定,单箱电池换电完成;重复过程,直至更换所有乏电池,移动暂存式换电机器人回到原点待机。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210223420.7A CN102700513B (zh) | 2012-06-29 | 2012-06-29 | 带有移动暂存架的换电机器人及换电方法 |
| US14/409,995 US9650022B2 (en) | 2012-06-29 | 2013-05-22 | Battery replacement robot with mobile storage rack and battery replacement method |
| EP13809029.5A EP2868540B1 (en) | 2012-06-29 | 2013-05-22 | Battery replacement robot with mobile storage rack and battery replacement method |
| PCT/CN2013/076054 WO2014000540A1 (zh) | 2012-06-29 | 2013-05-22 | 带有移动暂存架的换电机器人及换电方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210223420.7A CN102700513B (zh) | 2012-06-29 | 2012-06-29 | 带有移动暂存架的换电机器人及换电方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102700513A true CN102700513A (zh) | 2012-10-03 |
| CN102700513B CN102700513B (zh) | 2015-02-04 |
Family
ID=46893686
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201210223420.7A Active CN102700513B (zh) | 2012-06-29 | 2012-06-29 | 带有移动暂存架的换电机器人及换电方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9650022B2 (zh) |
| EP (1) | EP2868540B1 (zh) |
| CN (1) | CN102700513B (zh) |
| WO (1) | WO2014000540A1 (zh) |
Cited By (54)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014000540A1 (zh) * | 2012-06-29 | 2014-01-03 | 山东鲁能智能技术有限公司 | 带有移动暂存架的换电机器人及换电方法 |
| CN103522993A (zh) * | 2013-08-26 | 2014-01-22 | 上海电巴新能源科技有限公司 | 一种电动车车载动力电池箱快换装置 |
| CN104901141A (zh) * | 2015-06-10 | 2015-09-09 | 合肥通用机械研究院 | 冰箱压缩机性能测试设备用通电装置 |
| CN104908720A (zh) * | 2015-04-10 | 2015-09-16 | 康迪电动汽车(上海)有限公司 | 一种电动汽车动力电池简易交换站 |
| CN105109467A (zh) * | 2015-07-31 | 2015-12-02 | 谢子聪 | 一种基于移动式动力电池更换的电池调度系统的控制方法 |
| CN105109465A (zh) * | 2015-07-31 | 2015-12-02 | 谢子聪 | 一种基于移动式动力电池更换的电池调度系统 |
| JP2016526627A (ja) * | 2013-06-25 | 2016-09-05 | コーフィセン,ステン | 車両内のバッテリの交換のための方法及び装置 |
| CN105965540A (zh) * | 2016-07-18 | 2016-09-28 | 佛山市联智新创科技有限公司 | 一种用于pcb板搬运的机器人 |
| CN106364465A (zh) * | 2016-10-15 | 2017-02-01 | 南通中远重工有限公司 | 电池更换接驳小车 |
| CN106379290A (zh) * | 2016-10-15 | 2017-02-08 | 南通中远重工有限公司 | 电动汽车电池更换系统及基于该系统的电池更换方法 |
| CN106585576A (zh) * | 2016-11-15 | 2017-04-26 | 西安航天精密机电研究所 | 基于运动控制器的大巴车自动换电池方法 |
| CN106740723A (zh) * | 2016-11-22 | 2017-05-31 | 深圳精智机器有限公司 | 重载机器人 |
| CN107264321A (zh) * | 2017-06-29 | 2017-10-20 | 安徽先能新能源科技股份有限公司 | 一种分体式直流换电充电桩系统 |
| CN107879026A (zh) * | 2017-12-01 | 2018-04-06 | 嘉孚朗机器人设备(苏州)有限公司 | 料盒输送机构 |
| CN107966991A (zh) * | 2017-12-27 | 2018-04-27 | 广州番禺职业技术学院 | 一种上下料机器人的可寻址装置及方法 |
| CN108313027A (zh) * | 2018-02-11 | 2018-07-24 | 博众精工科技股份有限公司 | 汽车换电站旋转输送机构 |
| CN108406674A (zh) * | 2018-05-30 | 2018-08-17 | 格林美(武汉)城市矿产循环产业园开发有限公司 | 可调整姿态的拆解工位 |
| CN108454434A (zh) * | 2018-03-06 | 2018-08-28 | 浙江浙能能源服务有限公司 | 一种主动式智能移动充换电系统 |
| CN108658011A (zh) * | 2018-06-05 | 2018-10-16 | 广州市远能物流自动化设备科技有限公司 | 旋转伸缩式货叉及agv小车 |
| CN108658005A (zh) * | 2018-06-05 | 2018-10-16 | 广州市远能物流自动化设备科技有限公司 | 全自动agv小车 |
| CN108928591A (zh) * | 2017-05-25 | 2018-12-04 | 株式会社大福 | 物品移载装置 |
| CN108994232A (zh) * | 2018-08-02 | 2018-12-14 | 温州大学 | 一种冷镦机模具快速更换装置 |
| CN109204248A (zh) * | 2018-10-26 | 2019-01-15 | 青岛联合新能源汽车有限公司 | 一种电动汽车换电柜 |
| CN109291894A (zh) * | 2018-10-16 | 2019-02-01 | 潘世澄 | 电动汽车共享电池装置 |
| CN109501755A (zh) * | 2017-11-22 | 2019-03-22 | 蔚来汽车有限公司 | 电动汽车的自动换电平台和换电站 |
| CN109501752A (zh) * | 2017-11-08 | 2019-03-22 | 蔚来汽车有限公司 | 一种换电运输装置及其定位控制方法 |
| CN109532779A (zh) * | 2018-09-06 | 2019-03-29 | 蔚来汽车有限公司 | 换电站中的视觉定位系统及定位方法 |
| CN109987070A (zh) * | 2017-12-29 | 2019-07-09 | 上海电巴新能源科技有限公司 | 电池箱更换托盘机构及包含其的电池转运装置 |
| CN109994668A (zh) * | 2017-12-29 | 2019-07-09 | 上海电巴新能源科技有限公司 | 回转支撑装置、电池托盘总成和电池箱快换系统 |
| CN110357002A (zh) * | 2019-07-01 | 2019-10-22 | 河南宝威智控科技有限公司 | 一种电池搬运装置 |
| CN110606056A (zh) * | 2019-10-28 | 2019-12-24 | 广东博智林机器人有限公司 | 一种更换电池机器人的电池更换方法 |
| CN110884386A (zh) * | 2018-09-10 | 2020-03-17 | 奥动新能源汽车科技有限公司 | 电池取放方法及系统 |
| CN110884385A (zh) * | 2018-09-10 | 2020-03-17 | 奥动新能源汽车科技有限公司 | 托盘伸出定位方法和系统 |
| WO2020052562A1 (zh) * | 2018-09-10 | 2020-03-19 | 奥动新能源汽车科技有限公司 | 电池箱解锁控制系统、锁止控制系统及控制方法 |
| CN111169437A (zh) * | 2020-01-13 | 2020-05-19 | 国网山西省电力公司电力科学研究院 | 一种无人机电池自动更换装置及方法 |
| CN111507794A (zh) * | 2020-03-18 | 2020-08-07 | 深圳易马达科技有限公司 | 电池归还检测的方法、电池柜及共享电池系统 |
| CN111605430A (zh) * | 2020-05-19 | 2020-09-01 | 博众精工科技股份有限公司 | 一种车辆电池转动机构、传输部件及侧向换电平台 |
| CN112659962A (zh) * | 2020-12-23 | 2021-04-16 | 杭州海康机器人技术有限公司 | 电池的拆装推拉装置及电池拆装系统 |
| CN112794055A (zh) * | 2020-12-22 | 2021-05-14 | 福建诚壹实业有限公司 | 一种用于大批量出货的低温冷库自动货物车 |
| CN112830225A (zh) * | 2021-02-06 | 2021-05-25 | 深圳市敏锐捷自动化设备有限公司 | 一种自动装货系统 |
| CN112830224A (zh) * | 2021-02-06 | 2021-05-25 | 深圳市敏锐捷自动化设备有限公司 | 一种自动上货装置 |
| TWI732052B (zh) * | 2016-10-12 | 2021-07-01 | 大陸商蔚來(安徽)控股有限公司 | 用於電動汽車的底盤式換電站及其換電方法 |
| CN113276724A (zh) * | 2021-06-25 | 2021-08-20 | 湖南牛顺科技有限公司 | 搬运装置及其控制方法 |
| CN113619440A (zh) * | 2021-05-28 | 2021-11-09 | 蓝谷智慧(北京)能源科技有限公司 | 换电移动装置 |
| CN113635809A (zh) * | 2021-07-12 | 2021-11-12 | 隆瑞三优新能源汽车科技有限公司 | 一种用于新能源汽车的电池更换设备与方法 |
| WO2021228266A1 (zh) * | 2020-05-15 | 2021-11-18 | 奥动新能源汽车科技有限公司 | 视觉定位系统、换电设备和换电控制方法 |
| CN113895291A (zh) * | 2020-07-06 | 2022-01-07 | 奥动新能源汽车科技有限公司 | 推盘盒、换电设备及用于换电设备的电池包连接控制方法 |
| CN113895303A (zh) * | 2017-12-29 | 2022-01-07 | 上海电巴新能源科技有限公司 | 电池更换定位控制系统及换电设备、控制方法 |
| WO2022007813A1 (zh) * | 2020-07-06 | 2022-01-13 | 奥动新能源汽车科技有限公司 | 推盘盒、换电设备及其控制方法 |
| CN113932713A (zh) * | 2018-09-10 | 2022-01-14 | 奥动新能源汽车科技有限公司 | 电池仓的定位方法及定位系统 |
| CN114290947A (zh) * | 2021-12-30 | 2022-04-08 | 达闼机器人有限公司 | 机器人换电方法与机器人换电站 |
| CN114590162A (zh) * | 2022-03-22 | 2022-06-07 | 博众精工科技股份有限公司 | 一种换电站用电池旋转装置及换电站 |
| CN115635879A (zh) * | 2022-11-03 | 2023-01-24 | 航天锂电科技(江苏)有限公司 | 一种新能源货车换电站 |
| WO2023024099A1 (zh) * | 2021-08-27 | 2023-03-02 | 宁德时代新能源科技股份有限公司 | 换电平台和换电站 |
Families Citing this family (56)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014087365A1 (en) * | 2012-12-06 | 2014-06-12 | Chin Kok Yap | Integrated supply chain building |
| CN105151015A (zh) * | 2015-05-13 | 2015-12-16 | 长安大学 | 一种纯机械自适应式电池更换装置 |
| US10272567B2 (en) * | 2015-05-26 | 2019-04-30 | The Aes Corporation | Automated robotic battery tug |
| US9868421B2 (en) | 2015-06-17 | 2018-01-16 | Ample, Inc. | Robot assisted modular battery interchanging system |
| CN105836439A (zh) * | 2016-05-13 | 2016-08-10 | 江苏正昀新能源技术股份有限公司 | 一种圆柱型锂电池自动转盒机构 |
| US20180175638A1 (en) * | 2016-12-15 | 2018-06-21 | Jiping Zhu | Method and system for smart battery and application thereof |
| CN106740726A (zh) * | 2016-12-30 | 2017-05-31 | 天津市津电能源科技发展有限公司 | 一种拆装电池的机器人 |
| JP6286083B1 (ja) * | 2017-03-23 | 2018-02-28 | 本田技研工業株式会社 | 収容装置 |
| CN106887088B (zh) * | 2017-03-28 | 2022-08-02 | 新疆天山魔格信息科技有限公司 | 一种可拼接可包装便于存取的快递柜 |
| CN107067574B (zh) * | 2017-03-28 | 2022-08-02 | 新疆天山魔格信息科技有限公司 | 一种广告式自动存取快递柜 |
| CN107521465A (zh) * | 2017-08-18 | 2017-12-29 | 成都恒力达科技有限公司 | 共享电动汽车快速换电站 |
| CN207481873U (zh) * | 2017-10-31 | 2018-06-12 | 蔚来汽车有限公司 | 换电平台和包括该换电平台的充换电站 |
| CN109987063B (zh) * | 2017-12-29 | 2022-06-10 | 上海电巴新能源科技有限公司 | 水平装取电池的换电设备及电池拆卸、安装方法 |
| IT201800001428A1 (it) * | 2018-01-19 | 2019-07-19 | S M R E S P A | Metodo, apparato e stazione, di scambio di batterie elettriche per alimentare propulsori di veicoli |
| CN108516329A (zh) * | 2018-04-29 | 2018-09-11 | 王爱金 | 一种上下料机器人 |
| CN108832039B (zh) * | 2018-06-20 | 2023-11-14 | 北京联动天翼科技股份有限公司 | 铝壳电芯固定支架 |
| CN110745108B (zh) * | 2018-07-20 | 2022-03-22 | 奥动新能源汽车科技有限公司 | 换电控制系统及方法 |
| CN108944832B (zh) * | 2018-07-24 | 2021-06-15 | 浙江金阳光环境有限公司 | 一种便于电池更换的电动汽车结构 |
| CN109160266B (zh) * | 2018-09-03 | 2023-11-21 | 刘强 | 一种蓄废旧电池尺寸自动测量和姿态摆放系统 |
| CN109278722B (zh) * | 2018-10-26 | 2024-04-12 | 青岛联合新能源汽车有限公司 | 一种电动汽车共享电池系统及换电方法 |
| CN109204247B (zh) * | 2018-10-26 | 2024-04-12 | 青岛联合新能源汽车有限公司 | 一种电动汽车换电柜用换电转换台 |
| CN109484151A (zh) * | 2018-11-06 | 2019-03-19 | 贾哲敏 | 电动汽车电池更换装置 |
| CN109389769B (zh) * | 2018-12-06 | 2024-08-23 | 东莞京创智能科技有限公司 | 一种共享电池机 |
| CN109786881B (zh) * | 2018-12-25 | 2024-03-15 | 南京环务资源再生科技有限公司 | 一种圆柱电池放电装置 |
| CN109448533B (zh) * | 2018-12-26 | 2024-03-19 | 山东莱茵科斯特智能科技有限公司 | 继电器组装检测生产线自动化实训设备 |
| CN109624935B (zh) * | 2019-02-20 | 2024-01-16 | 深圳市多翼创新科技有限公司 | 一种电池自动更换结构、装置及无人机机场 |
| CN109703387B (zh) * | 2019-02-22 | 2024-01-19 | 国成能源建设集团股份有限公司 | 一种汽车锂电池储能装置的智能抽拉式装置 |
| JP2022527956A (ja) * | 2019-04-03 | 2022-06-07 | 奥動新能源汽車科技有限公司 | 取り付けプラットフォーム、電池交換装置及びその制御方法 |
| US11135938B2 (en) * | 2019-07-30 | 2021-10-05 | Honda Motor Co., Ltd. | Energy management |
| CN110581240A (zh) * | 2019-08-21 | 2019-12-17 | 珠海格力智能装备有限公司 | 一种电池更换方法、电池盒及机器人 |
| CN110435608A (zh) * | 2019-08-29 | 2019-11-12 | 宁波德昂纳机械有限公司 | 一种磁吸式搬运装置 |
| CN111077388A (zh) * | 2019-09-06 | 2020-04-28 | 重庆智能机器人研究院 | 一种模块化伺服驱动单元综合测试平台 |
| CN110774243B (zh) * | 2019-11-13 | 2023-11-10 | 浙江航泽智能科技有限公司 | 一种存取一体化工作台及其使用方法 |
| CN113119707B (zh) * | 2019-12-31 | 2024-07-02 | 奥动新能源汽车科技有限公司 | 用于电池包的锁止机构、快换支架组件及电动汽车 |
| CN113715671A (zh) * | 2020-05-25 | 2021-11-30 | 蓝谷智慧(北京)能源科技有限公司 | 换电控制方法、系统、可编辑逻辑控制器及电机控制器 |
| CN113751979B (zh) * | 2020-06-04 | 2024-10-18 | 中核武汉核电运行技术股份有限公司 | 一种用于压力容器主螺栓孔密封塞自动拆装装置 |
| CN111791746B (zh) * | 2020-06-30 | 2023-02-17 | 中国第一汽车股份有限公司 | 车辆的柔性换电系统、换电方法、电子设备及存储介质 |
| CN112026582A (zh) * | 2020-09-11 | 2020-12-04 | 蓝谷智慧(北京)能源科技有限公司 | 换电站的换电方法 |
| CN112213986B (zh) * | 2020-10-19 | 2021-10-01 | 重庆华渝重工机电有限公司 | 一种智能化的跨座式单轨门架式pc梁模板控制系统 |
| CN112172597A (zh) * | 2020-10-21 | 2021-01-05 | 山东优一电汽车科技有限公司 | 一种电动重卡高效换电方式 |
| CN112477681B (zh) * | 2020-11-30 | 2022-05-10 | 浙江吉利控股集团有限公司 | 一种车辆换电控制方法、装置、设备及存储介质 |
| CN112532852A (zh) * | 2021-01-06 | 2021-03-19 | 南京优玖如贸易有限公司 | 一种自动更换相机储存卡的装置 |
| CN113148650A (zh) * | 2021-02-09 | 2021-07-23 | 北京工业大学 | 一种主轴类零件机床组线精加工的缓存转送装置 |
| CN217804299U (zh) * | 2021-11-30 | 2022-11-15 | 奥动新能源汽车科技有限公司 | 车身支架及包含其的电动车辆 |
| CN114284938B (zh) * | 2021-12-01 | 2023-09-08 | 国网浙江省电力有限公司温州供电公司 | 一种输电线路微风振动监测装置 |
| CN114261375B (zh) * | 2021-12-20 | 2024-04-23 | 杭州海康机器人股份有限公司 | 一种电池更换方法、装置及换电站设备 |
| CN114103724B (zh) * | 2022-01-06 | 2023-09-08 | 三一重机有限公司 | 电池锁紧控制方法、装置和电动作业机械 |
| CN115920276B (zh) * | 2022-01-28 | 2024-01-05 | 山东电工时代能源科技有限公司 | 一种储能箱内部的加强防护装置 |
| CN114530167B (zh) * | 2022-02-17 | 2023-10-31 | 智慧华勤(深圳)科技有限公司 | 一种基于无线通信网络的数据加密系统 |
| CN114906004A (zh) * | 2022-03-04 | 2022-08-16 | 洛阳紫垣信息技术有限公司 | 一种智能农机用换电站控制系统 |
| CN114873253B (zh) * | 2022-06-07 | 2023-06-06 | 中迪机器人(盐城)有限公司 | 一种电池盒清洗用上下料设备 |
| CN115207553B (zh) * | 2022-08-08 | 2023-04-14 | 湖南汽车工程职业学院 | 一种具有自动监测功能的动力电池承载装置 |
| WO2024107162A1 (en) * | 2022-11-17 | 2024-05-23 | Yildiz Tekni̇k Üni̇versi̇tesi̇ | Charging system for electric vehicles |
| CN117022959A (zh) * | 2023-06-30 | 2023-11-10 | 重庆市信息通信咨询设计院有限公司 | 一种物流机器人自动寻址方法 |
| CN118237879B (zh) * | 2024-05-30 | 2024-08-06 | 中铁一局集团电务工程有限公司 | 一种机电产品安装维护辅助装置 |
| CN118651194B (zh) * | 2024-08-19 | 2024-10-15 | 山东天辰新能源科技有限公司 | 一种移动机器人用充电电池更换装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010142688A1 (de) * | 2009-06-10 | 2010-12-16 | Gottwald Port Technology Gmbh | System zum wechseln einer batterie eines flurgebundenen transportfahrzeuges, insbesondere eines fahrerlosen schwerlast-transportfahrzeuges für iso-container |
| US20110113609A1 (en) * | 2009-11-16 | 2011-05-19 | Siemens Aktiengesellschaft | Method and device for exchanging a battery in a vehicle |
| CN102275573A (zh) * | 2011-05-26 | 2011-12-14 | 山东鲁能智能技术有限公司 | 电动公交车电池快换系统 |
| CN202641653U (zh) * | 2012-06-29 | 2013-01-02 | 山东鲁能智能技术有限公司 | 带有移动暂存架的换电机器人 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3566798A (en) * | 1969-02-10 | 1971-03-02 | Herbert G Peitzman | Automobile turntable |
| US4608929A (en) * | 1985-04-19 | 1986-09-02 | Park Kap Y | Automobile parking and storage system |
| US5545967A (en) * | 1995-07-21 | 1996-08-13 | Precision Automation Systems, Inc. | Automatic battery management system |
| CN1261319C (zh) | 2004-11-11 | 2006-06-28 | 北京电巴科技有限公司 | 一种电动公交系统 |
| US7240620B2 (en) * | 2005-04-03 | 2007-07-10 | Suzanne Malott Yatsko | Easy vehicle turnaround |
| US7938612B2 (en) * | 2007-09-07 | 2011-05-10 | Multi-Shifter, Inc. | Battery-changing vehicle with cantilevered boom |
| CN201136484Y (zh) | 2008-01-09 | 2008-10-22 | 北京电巴科技有限公司 | 一种用于车载电池更换系统的定位装置 |
| CN101284524B (zh) | 2008-01-31 | 2012-05-30 | 北京理工大学 | 电动车动力电池组快速更换系统 |
| CN101890942B (zh) | 2010-08-11 | 2016-08-10 | 李立国 | 一种电动汽车电池组自动更换系统及其电池传送方法 |
| CN201769792U (zh) | 2010-08-25 | 2011-03-23 | 浙江中科正方电子技术有限公司 | 一种车载电池的更换系统 |
| CN102152776B (zh) | 2011-03-07 | 2013-10-09 | 国电南瑞科技股份有限公司 | 电动汽车电池更换站的电池更换系统及其更换方法 |
| CN102180143B (zh) * | 2011-04-12 | 2013-01-30 | 南京艾鸿科技有限公司 | 电动车的电池更换方法、电池更换系统及其电池架 |
| CN102490694B (zh) * | 2011-11-18 | 2014-05-28 | 山东鲁能智能技术有限公司 | 电动公交车电池快换机器人系统及快换方法 |
| CN102700513B (zh) | 2012-06-29 | 2015-02-04 | 山东鲁能智能技术有限公司 | 带有移动暂存架的换电机器人及换电方法 |
-
2012
- 2012-06-29 CN CN201210223420.7A patent/CN102700513B/zh active Active
-
2013
- 2013-05-22 WO PCT/CN2013/076054 patent/WO2014000540A1/zh active Application Filing
- 2013-05-22 EP EP13809029.5A patent/EP2868540B1/en active Active
- 2013-05-22 US US14/409,995 patent/US9650022B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010142688A1 (de) * | 2009-06-10 | 2010-12-16 | Gottwald Port Technology Gmbh | System zum wechseln einer batterie eines flurgebundenen transportfahrzeuges, insbesondere eines fahrerlosen schwerlast-transportfahrzeuges für iso-container |
| US20110113609A1 (en) * | 2009-11-16 | 2011-05-19 | Siemens Aktiengesellschaft | Method and device for exchanging a battery in a vehicle |
| CN102275573A (zh) * | 2011-05-26 | 2011-12-14 | 山东鲁能智能技术有限公司 | 电动公交车电池快换系统 |
| CN202641653U (zh) * | 2012-06-29 | 2013-01-02 | 山东鲁能智能技术有限公司 | 带有移动暂存架的换电机器人 |
Cited By (81)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9650022B2 (en) | 2012-06-29 | 2017-05-16 | Shandong Luneng Intelligence Technology Co., Ltd | Battery replacement robot with mobile storage rack and battery replacement method |
| WO2014000540A1 (zh) * | 2012-06-29 | 2014-01-03 | 山东鲁能智能技术有限公司 | 带有移动暂存架的换电机器人及换电方法 |
| JP2016526627A (ja) * | 2013-06-25 | 2016-09-05 | コーフィセン,ステン | 車両内のバッテリの交換のための方法及び装置 |
| CN103522993A (zh) * | 2013-08-26 | 2014-01-22 | 上海电巴新能源科技有限公司 | 一种电动车车载动力电池箱快换装置 |
| CN104908720A (zh) * | 2015-04-10 | 2015-09-16 | 康迪电动汽车(上海)有限公司 | 一种电动汽车动力电池简易交换站 |
| CN104901141A (zh) * | 2015-06-10 | 2015-09-09 | 合肥通用机械研究院 | 冰箱压缩机性能测试设备用通电装置 |
| CN105109465A (zh) * | 2015-07-31 | 2015-12-02 | 谢子聪 | 一种基于移动式动力电池更换的电池调度系统 |
| CN105109467A (zh) * | 2015-07-31 | 2015-12-02 | 谢子聪 | 一种基于移动式动力电池更换的电池调度系统的控制方法 |
| CN105965540A (zh) * | 2016-07-18 | 2016-09-28 | 佛山市联智新创科技有限公司 | 一种用于pcb板搬运的机器人 |
| CN105965540B (zh) * | 2016-07-18 | 2018-07-10 | 东莞市鼎新电路有限公司 | 一种用于pcb板搬运的机器人 |
| TWI732052B (zh) * | 2016-10-12 | 2021-07-01 | 大陸商蔚來(安徽)控股有限公司 | 用於電動汽車的底盤式換電站及其換電方法 |
| CN106364465A (zh) * | 2016-10-15 | 2017-02-01 | 南通中远重工有限公司 | 电池更换接驳小车 |
| CN106379290A (zh) * | 2016-10-15 | 2017-02-08 | 南通中远重工有限公司 | 电动汽车电池更换系统及基于该系统的电池更换方法 |
| CN106585576A (zh) * | 2016-11-15 | 2017-04-26 | 西安航天精密机电研究所 | 基于运动控制器的大巴车自动换电池方法 |
| CN106740723A (zh) * | 2016-11-22 | 2017-05-31 | 深圳精智机器有限公司 | 重载机器人 |
| CN108928591B (zh) * | 2017-05-25 | 2021-06-18 | 株式会社大福 | 物品移载装置 |
| CN108928591A (zh) * | 2017-05-25 | 2018-12-04 | 株式会社大福 | 物品移载装置 |
| CN107264321A (zh) * | 2017-06-29 | 2017-10-20 | 安徽先能新能源科技股份有限公司 | 一种分体式直流换电充电桩系统 |
| CN109501752A (zh) * | 2017-11-08 | 2019-03-22 | 蔚来汽车有限公司 | 一种换电运输装置及其定位控制方法 |
| CN109501755A (zh) * | 2017-11-22 | 2019-03-22 | 蔚来汽车有限公司 | 电动汽车的自动换电平台和换电站 |
| CN107879026A (zh) * | 2017-12-01 | 2018-04-06 | 嘉孚朗机器人设备(苏州)有限公司 | 料盒输送机构 |
| CN107966991A (zh) * | 2017-12-27 | 2018-04-27 | 广州番禺职业技术学院 | 一种上下料机器人的可寻址装置及方法 |
| CN107966991B (zh) * | 2017-12-27 | 2024-02-27 | 广州番禺职业技术学院 | 一种上下料机器人的可寻址装置及方法 |
| CN109994668A (zh) * | 2017-12-29 | 2019-07-09 | 上海电巴新能源科技有限公司 | 回转支撑装置、电池托盘总成和电池箱快换系统 |
| CN113910967A (zh) * | 2017-12-29 | 2022-01-11 | 上海电巴新能源科技有限公司 | 电池更换定位控制系统及换电设备、控制方法 |
| CN113910970B (zh) * | 2017-12-29 | 2024-05-03 | 上海电巴新能源科技有限公司 | 电池更换定位控制系统及换电设备、控制方法 |
| CN113895303A (zh) * | 2017-12-29 | 2022-01-07 | 上海电巴新能源科技有限公司 | 电池更换定位控制系统及换电设备、控制方法 |
| CN113910971A (zh) * | 2017-12-29 | 2022-01-11 | 上海电巴新能源科技有限公司 | 电池更换定位控制系统及换电设备、控制方法 |
| CN113910970A (zh) * | 2017-12-29 | 2022-01-11 | 上海电巴新能源科技有限公司 | 电池更换定位控制系统及换电设备、控制方法 |
| CN109987070A (zh) * | 2017-12-29 | 2019-07-09 | 上海电巴新能源科技有限公司 | 电池箱更换托盘机构及包含其的电池转运装置 |
| CN113910967B (zh) * | 2017-12-29 | 2024-05-03 | 上海电巴新能源科技有限公司 | 电池更换定位控制系统及换电设备、控制方法 |
| CN113910971B (zh) * | 2017-12-29 | 2023-12-29 | 上海电巴新能源科技有限公司 | 电池更换定位控制系统及换电设备、控制方法 |
| CN113895303B (zh) * | 2017-12-29 | 2024-02-13 | 上海电巴新能源科技有限公司 | 电池更换定位控制系统及换电设备、控制方法 |
| CN108313027A (zh) * | 2018-02-11 | 2018-07-24 | 博众精工科技股份有限公司 | 汽车换电站旋转输送机构 |
| CN108454434A (zh) * | 2018-03-06 | 2018-08-28 | 浙江浙能能源服务有限公司 | 一种主动式智能移动充换电系统 |
| CN108406674B (zh) * | 2018-05-30 | 2023-12-15 | 武汉动力电池再生技术有限公司 | 可调整姿态的拆解工位 |
| CN108406674A (zh) * | 2018-05-30 | 2018-08-17 | 格林美(武汉)城市矿产循环产业园开发有限公司 | 可调整姿态的拆解工位 |
| CN108658011A (zh) * | 2018-06-05 | 2018-10-16 | 广州市远能物流自动化设备科技有限公司 | 旋转伸缩式货叉及agv小车 |
| CN108658005A (zh) * | 2018-06-05 | 2018-10-16 | 广州市远能物流自动化设备科技有限公司 | 全自动agv小车 |
| CN108994232A (zh) * | 2018-08-02 | 2018-12-14 | 温州大学 | 一种冷镦机模具快速更换装置 |
| CN109532779A (zh) * | 2018-09-06 | 2019-03-29 | 蔚来汽车有限公司 | 换电站中的视觉定位系统及定位方法 |
| CN109532779B (zh) * | 2018-09-06 | 2021-10-15 | 蔚来(安徽)控股有限公司 | 换电站中的视觉定位系统及定位方法 |
| CN110884385B (zh) * | 2018-09-10 | 2022-03-22 | 奥动新能源汽车科技有限公司 | 托盘伸出定位方法和系统 |
| CN110884386B (zh) * | 2018-09-10 | 2022-03-22 | 奥动新能源汽车科技有限公司 | 电池取放方法及系统 |
| CN113932714B (zh) * | 2018-09-10 | 2024-05-03 | 奥动新能源汽车科技有限公司 | 电池仓的定位方法及定位系统 |
| WO2020052562A1 (zh) * | 2018-09-10 | 2020-03-19 | 奥动新能源汽车科技有限公司 | 电池箱解锁控制系统、锁止控制系统及控制方法 |
| CN110884385A (zh) * | 2018-09-10 | 2020-03-17 | 奥动新能源汽车科技有限公司 | 托盘伸出定位方法和系统 |
| CN113932713A (zh) * | 2018-09-10 | 2022-01-14 | 奥动新能源汽车科技有限公司 | 电池仓的定位方法及定位系统 |
| CN113932714A (zh) * | 2018-09-10 | 2022-01-14 | 奥动新能源汽车科技有限公司 | 电池仓的定位方法及定位系统 |
| WO2020052560A1 (zh) * | 2018-09-10 | 2020-03-19 | 奥动新能源汽车科技有限公司 | 电池取放方法及系统 |
| CN110884386A (zh) * | 2018-09-10 | 2020-03-17 | 奥动新能源汽车科技有限公司 | 电池取放方法及系统 |
| CN109291894A (zh) * | 2018-10-16 | 2019-02-01 | 潘世澄 | 电动汽车共享电池装置 |
| CN109204248B (zh) * | 2018-10-26 | 2024-04-12 | 青岛联合新能源汽车有限公司 | 一种电动汽车换电柜 |
| CN109204248A (zh) * | 2018-10-26 | 2019-01-15 | 青岛联合新能源汽车有限公司 | 一种电动汽车换电柜 |
| CN110357002A (zh) * | 2019-07-01 | 2019-10-22 | 河南宝威智控科技有限公司 | 一种电池搬运装置 |
| CN110606056A (zh) * | 2019-10-28 | 2019-12-24 | 广东博智林机器人有限公司 | 一种更换电池机器人的电池更换方法 |
| CN110606056B (zh) * | 2019-10-28 | 2020-11-27 | 广东博智林机器人有限公司 | 一种更换电池机器人的电池更换方法 |
| CN111169437A (zh) * | 2020-01-13 | 2020-05-19 | 国网山西省电力公司电力科学研究院 | 一种无人机电池自动更换装置及方法 |
| CN111169437B (zh) * | 2020-01-13 | 2023-04-07 | 国网山西省电力公司电力科学研究院 | 一种无人机电池自动更换装置及方法 |
| CN111507794A (zh) * | 2020-03-18 | 2020-08-07 | 深圳易马达科技有限公司 | 电池归还检测的方法、电池柜及共享电池系统 |
| WO2021228266A1 (zh) * | 2020-05-15 | 2021-11-18 | 奥动新能源汽车科技有限公司 | 视觉定位系统、换电设备和换电控制方法 |
| CN111605430A (zh) * | 2020-05-19 | 2020-09-01 | 博众精工科技股份有限公司 | 一种车辆电池转动机构、传输部件及侧向换电平台 |
| CN113895291A (zh) * | 2020-07-06 | 2022-01-07 | 奥动新能源汽车科技有限公司 | 推盘盒、换电设备及用于换电设备的电池包连接控制方法 |
| WO2022007813A1 (zh) * | 2020-07-06 | 2022-01-13 | 奥动新能源汽车科技有限公司 | 推盘盒、换电设备及其控制方法 |
| CN112794055A (zh) * | 2020-12-22 | 2021-05-14 | 福建诚壹实业有限公司 | 一种用于大批量出货的低温冷库自动货物车 |
| CN112659962B (zh) * | 2020-12-23 | 2023-02-10 | 杭州海康机器人股份有限公司 | 电池的拆装推拉装置及电池拆装系统 |
| CN112659962A (zh) * | 2020-12-23 | 2021-04-16 | 杭州海康机器人技术有限公司 | 电池的拆装推拉装置及电池拆装系统 |
| CN112830224A (zh) * | 2021-02-06 | 2021-05-25 | 深圳市敏锐捷自动化设备有限公司 | 一种自动上货装置 |
| CN112830225A (zh) * | 2021-02-06 | 2021-05-25 | 深圳市敏锐捷自动化设备有限公司 | 一种自动装货系统 |
| CN113619440A (zh) * | 2021-05-28 | 2021-11-09 | 蓝谷智慧(北京)能源科技有限公司 | 换电移动装置 |
| CN113276724B (zh) * | 2021-06-25 | 2023-03-03 | 湖南牛顺科技有限公司 | 搬运装置及其控制方法 |
| CN113276724A (zh) * | 2021-06-25 | 2021-08-20 | 湖南牛顺科技有限公司 | 搬运装置及其控制方法 |
| CN113635809A (zh) * | 2021-07-12 | 2021-11-12 | 隆瑞三优新能源汽车科技有限公司 | 一种用于新能源汽车的电池更换设备与方法 |
| CN113635809B (zh) * | 2021-07-12 | 2023-12-05 | 隆瑞三优新能源汽车科技有限公司 | 一种用于新能源汽车的电池更换设备与方法 |
| WO2023193628A1 (zh) * | 2021-08-27 | 2023-10-12 | 时代电服科技有限公司 | 换电站 |
| WO2023024099A1 (zh) * | 2021-08-27 | 2023-03-02 | 宁德时代新能源科技股份有限公司 | 换电平台和换电站 |
| WO2023123932A1 (zh) * | 2021-12-30 | 2023-07-06 | 达闼机器人股份有限公司 | 机器人换电方法与机器人换电站 |
| CN114290947A (zh) * | 2021-12-30 | 2022-04-08 | 达闼机器人有限公司 | 机器人换电方法与机器人换电站 |
| CN114590162B (zh) * | 2022-03-22 | 2023-11-03 | 博众精工科技股份有限公司 | 一种换电站用电池旋转装置及换电站 |
| CN114590162A (zh) * | 2022-03-22 | 2022-06-07 | 博众精工科技股份有限公司 | 一种换电站用电池旋转装置及换电站 |
| CN115635879A (zh) * | 2022-11-03 | 2023-01-24 | 航天锂电科技(江苏)有限公司 | 一种新能源货车换电站 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2868540A4 (en) | 2015-07-22 |
| US9650022B2 (en) | 2017-05-16 |
| US20150151723A1 (en) | 2015-06-04 |
| EP2868540A1 (en) | 2015-05-06 |
| CN102700513B (zh) | 2015-02-04 |
| EP2868540B1 (en) | 2019-10-09 |
| WO2014000540A1 (zh) | 2014-01-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN202641653U (zh) | 带有移动暂存架的换电机器人 | |
| CN102700513B (zh) | 带有移动暂存架的换电机器人及换电方法 | |
| CN102602372B (zh) | 一种电动公交车电池快换系统及其换电方法 | |
| CN202389352U (zh) | 电动公交车换电机器人系统 | |
| CN202491788U (zh) | 一种电动公交车电池快换系统 | |
| CN102490694B (zh) | 电动公交车电池快换机器人系统及快换方法 | |
| CN102849043B (zh) | 电动公交车换电机器人系统及方法 | |
| US8660692B2 (en) | Current alternating robot system and method of electric bus | |
| CN203795916U (zh) | 用于机械式立体停车库的升降系统 | |
| CN104895369B (zh) | 一种可侧向搬运汽车的智能机器人 | |
| CN202788102U (zh) | 一种立体车库 | |
| CN102358266B (zh) | 一种应急移动换电车及其换电方法 | |
| CN106013905A (zh) | 一种平面移动类立体车库的智能控制系统 | |
| CN103334615A (zh) | 梳型交换式垂直升降类机械式立体停车库 | |
| CN103590634A (zh) | 超薄型车辆横向搬运机器人 | |
| CN107444823A (zh) | 一种应用于堆垛机的智能穿梭小车 | |
| CN102275573B (zh) | 电动公交车电池快换系统 | |
| CN203452421U (zh) | 梳型交换式垂直升降类机械式立体停车库 | |
| CN102936972A (zh) | 一种平面移动式立体车库系统 | |
| CN202208283U (zh) | 一种应急移动换电车 | |
| CN201765504U (zh) | 一种轮对立体仓库控制系统 | |
| CN102900258A (zh) | 一种自动式纵向汽车搬运器 | |
| CN207209136U (zh) | 一种应用于堆垛机的智能穿梭小车 | |
| CN219727926U (zh) | 一种移动式重卡充换电站系统 | |
| CN202368545U (zh) | 电动公交车电池快换机器人系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CP03 | Change of name, title or address |
Address after: 250101 Electric Power Intelligent Robot Production Project 101 in Jinan City, Shandong Province, South of Feiyue Avenue and East of No. 26 Road (ICT Industrial Park) Patentee after: National Network Intelligent Technology Co., Ltd. Address before: 250101 Qilu Software Park building, Ji'nan hi tech Zone, Shandong, B-205 Patentee before: Shandong Luneng Intelligent Technology Co., Ltd. |
|
| CP03 | Change of name, title or address |