CN101822527B - 光学相干层析摄影方法和光学相干层析摄影装置 - Google Patents
光学相干层析摄影方法和光学相干层析摄影装置 Download PDFInfo
- Publication number
- CN101822527B CN101822527B CN201010123802.3A CN201010123802A CN101822527B CN 101822527 B CN101822527 B CN 101822527B CN 201010123802 A CN201010123802 A CN 201010123802A CN 101822527 B CN101822527 B CN 101822527B
- Authority
- CN
- China
- Prior art keywords
- measured zone
- image
- measured
- light
- coherence tomography
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02041—Interferometers characterised by particular imaging or detection techniques
- G01B9/02044—Imaging in the frequency domain, e.g. by using a spectrometer
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/102—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions for optical coherence tomography [OCT]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02055—Reduction or prevention of errors; Testing; Calibration
- G01B9/02062—Active error reduction, i.e. varying with time
- G01B9/02063—Active error reduction, i.e. varying with time by particular alignment of focus position, e.g. dynamic focussing in optical coherence tomography
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02055—Reduction or prevention of errors; Testing; Calibration
- G01B9/02075—Reduction or prevention of errors; Testing; Calibration of particular errors
- G01B9/02078—Caused by ambiguity
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02083—Interferometers characterised by particular signal processing and presentation
- G01B9/02085—Combining two or more images of different regions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/0209—Low-coherence interferometers
- G01B9/02091—Tomographic interferometers, e.g. based on optical coherence
Abstract
本发明涉及光学相干层析摄影方法和光学相干层析摄影装置。根据本发明的光学相干层析摄影方法包括以下步骤:将待测对象分成在测量光的照射方向上彼此相邻的多个测量区域,并且基于相干光的波长谱对于每个测量区域获取测量图像;以及通过从测量图像去除与测量图像的测量区域相邻的相邻区域的层析摄影图像的镜像,获取每个测量区域的层析摄影图像。
Description
技术领域
本发明涉及光学相干层析摄影方法和光学相干层析摄影装置,更特别地,涉及使用用于医疗领域中的相干光学系统的光学相干层析摄影方法和光学相干层析摄影装置。
背景技术
当前,存在各种各样的使用光学设备的眼科设备。这样的眼科设备的例子包括前眼成像装置、视网膜照相机和扫描激光检眼镜(SLO)。在这些眼科设备当中,光学相干层析摄影(OCT)装置能够以高分辨率获得待测对象的层析摄影图像,并因此正在变成对于视网膜专科的门诊病人医学治疗所必不可少的设备。
例如,在日本专利申请公开No.H11-325849中公开了一种OCT装置。在日本专利申请公开No.H11-325849中公开的OCT装置中,使用低相干光。来自光源的光通过诸如分束器之类的分割的光路被分成测量光和参考光。测量光通过测量光路被施加到诸如人眼之类的待测对象,并且,来自待测对象的返回光通过检测光路被引向检测位置。这里使用的返回光指的是包含关于待测对象相对于光的照射方向的界面的信息的反射光或散射光。参考光通过参考光路被引向检测位置。向检测位置的输入是由返回光和参考光之间的干涉得到的相干光。然后,通过使用分光计等对相干光的波长谱进行一并获取,并且对波长谱进行傅立叶变换,由此获得待测对象的层析摄影图像。一般地,对波长谱进行一并测量的OCT装置被称为谱域OCT(SD-OCT)装置。
通过SD-OCT装置,可通过选择用于控制待测对象中的测量光的聚焦位置的透镜的数值孔径(NA),调整焦点深度和横向(与测量光的照射方向垂直的方向)分辨率。例如,数值孔径越大,则焦点深度越小,但横向分辨率越高。另一方面,如果减小数值孔径,那么焦点深度变大,但横向分辨率变低。换句话说,焦点深度和横向分辨率之间的关系是权衡关系。
作为克服这种关系的方法,在“OPTICS LETTERS Vol.28,2003,pp.182-184”中公开了动态焦点OCT。在这种模式中,采用在改变光路长度的同时获取层析摄影图像的时域OCT(TD-OCT)。于是,在相互同步地改变光路长度和移动透镜的焦点位置的同时,获取层析摄影图像。结果,在维持高的横向分辨率的同时,可以增大待测对象的测量范围(获取的层析摄影图像中的测量光的照射方向的范围)。
发明内容
但是,在TD-OCT中,在连续改变光路长度的同时执行测量。因此,与用SD-OCT相比,用TD-OCT获取(测量)层析摄影图像花费更多的时间。为了实现待测对象的测量范围大并且横向分辨率高的层析摄影图像的高速获取,考虑以谱域模式执行动态聚焦的方法。如上所述,在谱域模式中,随着横向分辨率增加,焦点深度减小。因此,为了增大测量范围,需要出于测量的目的而将待测对象分成沿测量光的照射方向彼此相邻的多个测量区域。作为结果,出现需要在待测对象的内部布置相干门(coherence gate)的情况。术语“相干门”指的是处于测量光路中并且具有与参考光路的光学距离相同的光学距离的位置。这意味着跨过相干门在相邻区域中形成相互反映的图像。这两个图像是等同的,因此,可采用它们中的任一个用于层析摄影图像。以下,待获取的图像(即,被采用作为该区域中的层析摄影图像的图像)被称为“实像”,并且,另一图像被称为“镜像”。在采用SD-OCT模式的情况下,由相干光代表的图像(测量图像)包括实像和镜像,因此,将实像与镜像分离是必不可少的。在日本专利申请公开No.H11-325849中公开的装置中,为了获取一个区域的实像,需要多次改变相干门的位置,并且然后执行对光谱的测量。因此,测量花费许多时间。
因此,本发明的目的是,提供可以通过简单的方法从测量图像去除镜像并且可在短时间内获取层析摄影图像的光学相干层析摄影方法和光学相干层析摄影装置。
根据本发明,提供一种光学相干层析摄影方法,所述光学相干层析摄影方法将来自光源的光分成测量光和参考光,并且基于参考光和返回光的相干光的波长谱获取待测对象的层析摄影图像,所述返回光是在将测量光照射到待测对象上时从待测对象返回的,所述光学相干层析摄影方法包括以下步骤:
将待测对象分成在测量光的照射方向上彼此相邻的多个测量区域,并且基于相干光的波长谱,对于每个测量区域获取测量图像;以及
通过从测量图像去除与测量图像的测量区域相邻的相邻区域的层析摄影图像的镜像,对于每个测量区域获取层析摄影图像。
根据本发明,提供一种光学相干层析摄影装置,所述光学相干层析摄影装置将来自光源的光分成测量光和参考光,并且基于参考光和返回光的相干光的波长谱获取待测对象的层析摄影图像,所述返回光是在将测量光照射到待测对象上时从待测对象返回的,该光学相干层析摄影装置包括:
测量图像获取单元,被配置为在待测对象被分成在测量光的照射方向上彼此相邻的多个测量区域的状态下,基于相干光的波长谱,对于每个测量区域获取测量图像;以及
层析摄影图像获取单元,被配置为通过从测量图像去除与测量图像的测量区域相邻的相邻区域的层析摄影图像的镜像,对于每个测量区域获取层析摄影图像。
根据本发明的一些方面,能够提供光学相干层析摄影方法和光学相干层析摄影装置,所述光学相干层析摄影方法和光学相干层析摄影装置能够通过简单的方法从测量图像去除镜像,并且能够在短时间内获取层析摄影图像。
通过参照附图阅读示例性实施例的以下描述,本发明的其它特征将变得清晰。
附图说明
图1A示出待测对象的理想层析摄影图像。
图1B示出在测量区域中反映的镜像。
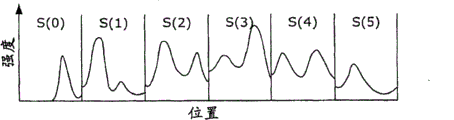
图1C示出各测量区域的测量图像。
图1D示出各测量区域的所计算的实像。
图2示出在根据例子1的OCT装置中使用的Mach-Zehnder干涉系统的配置。
图3示出测量区域的宽度。
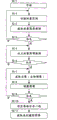
图4是示出例子1中的分析测量图像数据的方法的流程图。
图5示出使用反射镜作为待测对象时的相干门和反射镜之间的距离与测量强度的关系。
图6是示出例子2中的分析测量图像数据的方法的流程图。
图7示出实像的图像调整的方法。
具体实施方式
以下,将描述根据本实施例的光学相干层析摄影装置。
根据本实施例的光学相干层析摄影装置通过分割的光路将来自光源的光分成测量光和参考光。测量光通过测量光路被照射到待测对象上。在照射测量光时从待测对象返回的返回光通过检测光路被引向检测位置。可由聚焦驱动机构控制待测对象中的(照射方向上的)测量光的焦点位置。参考光通过参考光路被引向检测位置。在参考光路中,设置反射镜,并且,可通过反射镜驱动机构调整相干门的位置。由于可以相互同步地控制相干门和焦点位置,因此能够沿照射方向将待测对象分成彼此相邻的多个测量区域,并且对于每个区域顺序地执行测量。
被引向检测位置的光(返回光和参考光的相干光)被分解成其波长谱,并且被分析。由此,获取待测对象的层析摄影图像。在本实施例中,基于相干光的波长谱,对于每个测量区域获取测量图像。通过从测量图像去除与该测量图像的测量区域相邻的相邻区域中的层析摄影图像的镜像,获取每个测量区域的层析摄影图像(实像)。通过组合所有测量区域的实像(将其接合在一起),可以获取测量范围大并且横向分辨率高的层析摄影图像(所希望的层析摄影图像)。
这里,参照图1A~1D,描述用根据本实施例的光学相干层析摄影装置获取实像和希望的层析摄影图像的方法(根据本实施例的光学相干层析摄影方法)的原理。在图1A~1D中,垂直轴表示反射强度(光的强度),水平轴表示待测对象中的(在照射方向上的)位置。图1A示出待测对象的理想层析摄影图像。在本实施例中,待测对象以规则的间隔被分成测量区域Z(0)~Z(5),并且,在区域的基础上执行测量。附图标记R(0)~R(5)分别代表测量区域Z(0)~Z(5)的实像。在本实施例中,测量区域Z(0)作为第一测量区域被设置在待测对象的端部。多个测量区域被设定为使得在测量光的照射方向上顺序地布置第一到第x测量区域(x是大于1的整数;在图1A~1D的例子中为测量区域Z(0)~Z(5))。注意,通过OCT装置,测量具有大的折射率差的部分作为大的信号。因此,待测对象的端部的区域是与其中可忽略折射率差的范围相邻的区域。注意,即使在待测对象的内部,如果可以在大于或等于测量区域的宽度的范围内忽略折射率差,那么所关注的测量区域和设置在该测量区域外部的区域也可被视为不同的对象。因此,这种测量区域可被视为待测对象的端部的区域。
图1B示意性地示出当相干门被设置在测量区域Z(i-1)和测量区域Z(i)(i>1)的边界处时在测量区域Z(i)中反映的镜像(要在测量区域Z(i)的实像上叠加的镜像)。由于在测量区域Z(i)中反映的镜像是测量区域Z(i-1)的实像的镜像,因此镜像由附图标记R′(i-1)表示。注意,i=0的测量区域(测量区域Z(0))是待测对象的端部的区域,因此不出现镜像。
图1C示出当相干门被设置在测量区域Z(i-1)和测量区域Z(i)之间的边界处时的测量区域的测量图像S(0)~S(5)。测量区域Z(1)~Z(5)的测量图像各是在实像上重叠镜像的图像。但是,如上所述,在测量区域Z(0)中不出现镜像,因此测量区域Z(0)的测量图像S(0)是实像。测量图像S(i)由表达式1-1和1-2表达。
S(i)=R(i) i=0 (1-1)
S(i)=R(i)+R′(i-1) i=1~5 (1-2)
表达式1-1表示测量区域Z(0)的测量图像S(0)是实像R(0)。表达式1-2表示可通过从测量区域Z(i)的测量图像S(i)减去实像R(i-1)的镜像R′(i-1)获得测量区域Z(i)的实像R(i)。
在通过从测量图像去除镜像获得的实像由附图标记C(i)表示的条件下,实像C(i)由表达式2-1和2-2表达(附图标记C′(i-1)表示实像C(i-1)的镜像)。
C(i)=S(i) i=0 (2-1)
C(i)=S(i)-C′(i-1) i=1~5 (2-2)
可从实像C(i-1)计算镜像C′(i-1)。如上所述,在第一测量区域(测量区域Z(0))中不出现镜像。因此,在本实施例中,对于第一测量区域,采用测量图像S(0)作为层析摄影图像(实像)C(0)。依次地对于第二到第x测量区域,通过从第Y测量区域的测量图像去除第(Y-1)测量区域的实像的镜像,获得第Y(2≤Y≤X)实像。即,在图1D的例子中,对于i=1~5,顺序地计算实像C(i)。这使得能够对于每个测量区域获取实像。通过将获取的实像接合在一起,可以获得所希望的层析摄影图像(图1D)。
注意,在本实施例中,从i=1起顺序地计算实像C(i);但是,计算方法不限于本实施例中的方法。例如,在测量区域Z(5)被设置在待测对象的端部并且相干门被设置在测量区域Z(I+1)和测量区域Z(I)之间的边界处的情况下(I不小于0且不大于y,并且在图1A~1D的例子中y=4),测量区域Z(5)可以是第一测量区域。更具体而言,在这种情况下,测量图像S(5)变为实像C(5),在测量区域Z(I)中反映测量区域Z(I+1)的实像C(I+1)的镜像。因此,可通过从测量图像S(I)减去镜像C′(I+1)获得实像C(I)。可通过对于l=4~0顺序地计算实像C(I),获得各测量区域的实像。
可以构想,端部位于待测对象的内部。例如,可以构想,测量区域Z(2)和测量区域Z(4)是待测对象的端部的区域,并且,在测量区域Z(3)中不存在结构。在这种情况下,如果相干门被设置在测量区域Z(i-1)和测量区域Z(i)之间的边界处,那么测量图像S(3)变为实像C(2)的镜像,并且,测量图像S(4)变为实像C(4)。因此,在这种情况下,能够以与上述方式相同的方式计算测量区域Z(0)、Z(1)和Z(5)的实像。
以这种方式,通过根据本实施例的光学相干层析摄影装置,对各测量区域执行至少一次测量,并且,通过使用测量数据,计算各测量区域的实像。更具体而言,利用通过使用另一区域的实像来去除测量图像的镜像的简单方法,可以在短时间内获得层析摄影图像。此外,通过将获得的实像(层析摄影图像)接合在一起,可以高速获得待测对象中的测量范围大并且横向分辨率高的层析摄影图像。由此,可以实现高速的动态焦点OCT装置。
<例子1>
下面,描述根据本实施例的光学相干层析摄影装置的特定例子。具体地,以下描述应用本发明的眼科OCT装置。
<光学装置的配置>
图2示出用于根据本例子的OCT装置中的Mach-Zehnder干涉系统的配置。从光源201发射的光(发射光)穿过单模光纤202-1并被引向透镜211-1。发射光由分束器203-1分成参考光205和测量光206。在用测量光206照射眼睛207或待测对象之后,测量光206返回,作为由反射或散射导致的返回光208。参考光和返回光穿过分束器203-2、透镜211-2和单模光纤202-3,并入射到分光计218上。在分光计中获取的诸如光(返回光和参考光的相干光)的波长谱之类的数据被输入到计算机219。注意,光源201是作为代表性的低相干光源的超辐射发光二极管(super luminescent diode,SLD)。考虑到待测对象是眼睛的事实,优选发射光是红外光(例如,具有840nm的中心波长和50nm的带宽的光)。
对于参考光205的参考光路给出描述。由分束器203-1的分割得到的参考光205顺序地入射到反射镜214-1~214-3上。参考光205被引向分束器203-2,并入射到分光计上。注意,参考光205穿过反射镜214-1和214-2之间的色散补偿玻璃215-1的内部。色散补偿玻璃215-1的长度为L1,其优选等于典型眼睛的深度的两倍。优选该长度,以对于当测量光206在眼睛207中反射和散射时导致的色散,补偿参考光205。在本例子中,长度L1被给出为46mm。该长度为被视为日本人的眼球的平均直径的23mm的两倍。此外,通过反射镜驱动机构213,反射镜214-1和214-2可在图2中的箭头所指示的方向上移动。通过移动反射镜214-1和214-2的位置,参考光205的光路长度可被调整和控制。参考光205穿过反射镜214-2和214-3之间的色散补偿玻璃215-2的内部。色散补偿玻璃215-2被用于扫描眼睛用的物镜216和扫描透镜217的色散补偿。
对于测量光206的测量光路给出描述。由分束器203-1的分割得到的测量光206从分束器203-3被反射,并入射到XY扫描仪204的反射镜上。XY扫描仪204在与光轴(照射方向)垂直的方向上执行对视网膜210的光栅扫描。测量光206的中心被调整为与XY扫描仪204的反射镜的旋转中心对准。物镜216和扫描透镜217构成用于扫描视网膜210(将测量光引向视网膜的各位置)的光学系统,并且被用于以角膜209附近的点为支点来扫描视网膜210。在本例子中,物镜216和扫描透镜217的焦距分别为50mm和50mm。可通过聚焦驱动机构212调整物镜216的(照射方向的)焦点位置。当测量光206入射到眼睛207上时,测量光206被视网膜210反射和散射,并且作为返回光208返回。返回光208直到分束器203-3穿过与测量光206相同的光路,并且穿过分束器203-3。然后,返回光208被分束器203-2引导以入射到分光计上。
注意,聚焦驱动机构、反射镜驱动机构、XY扫描仪和分光计被计算机219控制以执行希望的操作。计算机执行分光计的数据处理、数据保存和图像处理。
<测量范围>
下面,参照图3,描述测量区域(沿照射方向)的宽度。在图3中,垂直轴表示反射强度,水平轴表示待测对象的内部的(在光施加方向上的)位置。图3示意性示出相干门301被放在测量区域Z(3)和与其相邻的测量区域Z(2)之间、并且执行对测量区域Z(3)的测量的情况。附图标记302表示各测量区域的宽度,附图标记303表示测量深度,附图标记304表示焦点深度。以下将描述测量深度和焦点深度。
焦点深度(DOF)表示获得的图像的可见范围。焦点深度通过使用用于将测量光聚焦到待测对象中的透镜的数值孔径(NA)和光源的中心波长λ的表达式3(光学距离)表达。在图3中,由表达式3获得的范围的正侧由实线表示,并且,负侧由虚线表示。
DOF=±λ/(2NA2) (3)
在待测对象是眼睛并且待测对象被分成6个测量区域的情况下,如果各测量区域的宽度为500μm,那么优选焦点深度比1000μm(±500μm)的总长度长。注意,在典型的SD-OCT装置中,焦点深度的总长度约为3mm。当然,如果分割数增大,那么可使得测量区域更小,因此也可减小焦点深度。注意,在一定程度上超过焦点深度的区域不是没有测量的可能性。焦点不需要被设定于相干门的位置处。但是,为了获得均匀的图像,优选焦点深度比各测量区域的宽度大。在OCT装置的情况下,可通过改变光束的直径来改变NA。一般地,如果入射到眼睛上的光束的直径增大,那么NA增大。
测量深度代表其中不出现混叠(aliasing)的范围(混叠的出现使得测量困难)。测量深度通过使用分光计的线传感器的像素数N(偶数,典型地为2的幂,诸如1024和2048)和由分光计检测的波数的光谱带宽ΔK的表达式4(光学距离)表达。在图3中,通过表达式4获得的范围的正侧和负侧分别由实线和虚线表示。
Lmax=±N/(4ΔK) (4)
假定测量光的中心波长为840nm、带宽为50nm并且分光计的线传感器的像素数为1024,那么可被测量的范围延伸直到约±3.4mm的光学距离。注意,由表达式4表示的测量深度是理论值,并且,事实上,由于分光计的光学分辨率,因此实际采样次数比N小。因此,可精确复原(测量)的范围比理论的测量深度小。因此,测量区域的宽度需要被设为比理论测量深度小。一般地,满足测量区域的宽度<理论测量深度的关系。此外,为了获得均匀的图像,优选焦点深度(总长度)和测量区域的宽度满足表达式5的关系。即,优选测量区域的宽度小于获取所关注的测量区域的测量图像时的焦点深度的一半。
2×测量区域的宽度<焦点深度(总长度) (5)
在离散傅立叶变换中,构成测量图像的各元素具有由表达式6(光学距离)给出的离散值。这里,t是整数,0≤t≤N/2。
L=t/(2ΔK) (6)
数值深度分辨率δ(L)由表达式7表达。数值深度分辨率δ(L)也是每个像素的间隔。在本例子中,数值深度分辨率δ(L)是约6.8μm的光学距离。
Lmin=δ(L)=1/(2ΔK) (7)
<信号处理>
参照图1A~1D和图4,描述分析测量图像的数据(测量图像数据)的方法。在本例子中,描述其中相干门被设置在测量区域Z(i-1)和测量区域Z(i)之间的边界处、并且执行对测量区域Z(i)的测量的情况。以下,测量区域Z(i)的测量图像数据由附图标记S(i,k)表示。在这种表示中,i是0~M-1的区域号,k是区域中的0~n的元素号(i和n二者均为整数)。M是区域的数量,n是满足n<N/2的元素的数量。N是线传感器的像素的数量。如果测量区域的宽度约为500μm(由于在本例子中δ(L)=6.8μm),那么n=500/6.8=约74个像素。可通过增大分割数来减小测量区域的宽度,因此,n相对于线传感器的像素的数量减小。注意,假定测量图像数据S(i-1,n)的位置与测量图像数据S(i,0)的位置相同,并且相干门位于该位置处。类似地,各测量区域的实像的数据(实像数据)由附图标记C(i,k)表示。
在步骤S1中,测量开始。注意,i的初始值取为0。
在步骤S2中,获取测量区域Z(i)(即,Z(0))的测量图像数据(测量图像获取单元)。由于待测对象是眼睛,因此相干门位于相对于视网膜的角膜侧的位置。在相干门被设置在角膜侧之后,随着相干门向视网膜移动,测量图像开始改变。更具体而言,同步于相干门的移动,测量图像更加接近相干门。作为移动的结果,当测量图像到达希望的位置时,执行对测量区域Z(0)的测量。希望的位置指的是不产生镜像的区域。注意,焦点位置与反射镜的位置同步地移动。由于在测量区域Z(0)中不产生镜像,因此可以如表达式8表达的那样直接从测量图像S(i,k)获取实像C(0,k)。然后,将i加1,并且过程前进到步骤S3。
C(0,k)=S(0,k) 0≤k≤n (8)
在步骤S3中,相干门被设置在测量区域Z(i-1)和测量区域Z(i)之间的边界处,并且执行对测量区域Z(i)的测量。更具体而言,获取测量区域Z(i)的测量图像数据S(i,k)(测量图像获取单元)。注意,测量图像数据S(0,0)不是层析摄影数据(在该元素的位置处不存在待测对象的结构),并因此可以用测量图像数据S(0,1)替代测量图像数据S(0,0)。
在步骤S4中,从在步骤S3中获取的测量图像数据S(i,k)去除镜像数据,以获取实像数据C(i,k)(层析摄影图像获取单元)。通过相对于相干门的位置(在本例子中为测量区域和与测量区域相邻的相邻区域之间的边界)进行反转,获取去除的镜像数据。更具体而言,从测量图像数据S(i,k)去除作为镜像数据的实像数据C(i-1,n-k)。注意,实像数据C(i,0)是放置相干门的位置处的数据,并因此等于实像数据C(i-1,n)(表达式9-1)。计算的实像数据C(i,k)由表达式9-2表达。
C(i,0)=C(i-1,n) k=0 (9-1)
C(i,k)=S(i,k)-C(i-1,n-k) 0<k≤n (9-2)
在步骤S5中,将对于每个测量区域获取的实像数据C(i,k)接合在一起。如果i小于希望的值(在图1A~1D的例子中为5)(在这种情况下,测量继续;在步骤S6中为“是”),那么将i加1,并且过程返回步骤S3。如果i达到希望的值(i=5;在这种情况下,测量结束;在步骤S6中为“否”),过程前进到步骤S7,并且然后过程结束。通过将所有区域的实像数据接合在一起,获得希望的层析摄影图像。
应当注意,在本例子中,在将相干门设置在测量区域的边界处的情况下进行计算;但是,由光源的光谱导致的误差有时与S(i,k)的i为低次的分量混合。在这种情况下,当获取测量图像时,相干门的位置可相对于测量区域和相邻区域之间的边界被设置在相邻区域侧。例如,当执行对测量区域Z(i)的测量时,相干门应从测量区域Z(i-1)和测量区域Z(i)之间的边界向测量区域Z(i-1)偏移几个到几十个元素。可根据光源的相干函数等确定偏移元素的数量。
在本例子中,每当获取实像时,都将实像与其它的实像接合。可以在获取了所有的实像之后将它们接合在一起。可以在获取了所有的测量图像之后计算实像。当然,如果待检查对象的结构不清楚,那么可以插入搜索其中不产生镜像的测量区域的处理。其中不产生镜像的测量区域是其中相干门移动并且测量图像仅在一个方向上移动的部分。
<例子2>
在例子2中,描述解决由于SD-OCT特定的现象导致的问题的方法。参照图5,描述SD-OCT特定的现象。图5示出使用反射镜作为待测对象的情况下的对于水平轴的相干门和反射镜之间的距离与对于垂直轴的测量强度(反射强度)的关系。特别地,示出当反射镜的位置到相干门的距离为50μm、100μm、150μm、200μm、300μm、400μm、500μm、600μm、800μm、1000μm、1200μm、1600μm和2000μm时测量的反射强度(数字值)。虚线示意性地示出称为衰减函数的测量结果的包络线(关于测量区域中的照射方向上的位置的强度变化)。在图5中,随着反射镜的位置越远离相干门,强度衰减就越大。这被称为“滚降(roll-off)”等,并且由于分光计的分辨率等而出现。
如上所述,在出现该现象的情况下,随着位置更接近相干门,强度更强,而随着位置更远离相干门,强度更弱。因此,在测量区域的边界处,强度在一个区域中强而在另一区域中弱。这导致彼此相邻的区域之间的测量强度的跳动。
<信号处理>
参照图6,描述出现这种现象时的信号处理的方法(分析测量图像数据的方法)。
在步骤S2-1中,测量开始。
在步骤S2-2~S2-4中,在切换测量区域的同时顺序地获取测量图像数据。注意,在本例子中,在比测量区域的宽度(例如500μm(0≤k≤n))宽的范围(例如,0≤k≤N-1)中获取测量图像。
在步骤S2-5和S2-6中,根据基于上述的衰减函数的校正函数。顺序地校正各测量区域的测量图像数据。更具体而言,光学相干层析摄影装置事先存储或获取上述的校正函数,并且,通过使用与位置对应的校正函数的值(通过将位置代入校正函数获得的值;校正数据)对于每个测量位置(元素的位置)执行校正。假定用于校正的数据是校正数据D(i,k),那么校正后的测量图像数据(校正图像数据)H(i,k)由表达式10表达。
H(i,k)=S(i,k)/D(i,k) (10)
注意,校正函数可以是从理论或实验获得的衰减函数本身,也可以是衰减函数的近似函数(直线或二次曲线),并且,也可以是衰减函数和给定系数的和或积。如果可以消除如上所述的现象,那么可以使用任何函数。
随后的处理与例子1相同。更具体而言,用校正后的测量图像数据H(i,k)替代测量图像数据S(i,k)。
注意,可以使用单一校正函数;但是,如果测量区域的特性(上述的特性;衰减函数)彼此不同,那么优选准备根据每个测量区域的校正函数(优选为对于每个测量区域不同的校正函数)。例如,在焦点深度根据焦点位置改变的情况下,特性对于每个测量区域改变,因此这种准备是有效的。
在步骤S2-7~S2-9中,从测量图像去除镜像,以对于每个测量区域获取实像,并且,对于每个测量区域执行对实像的图像调整。图像调整是对实像的像素值和对测量区域的位置(测量光的照射方向上的位置)的调整。例如,在例子1中,实像数据C(i,0)的位置和实像数据C(i-1,n)的位置彼此相同。但是,它们的位置有时彼此移位。这是由于相干门的位置误差和光源的强度误差等导致的。
参照图7,描述图像调整。在图7中,垂直轴表示反射强度,水平轴表示待测对象中的(照射方向上的)位置。在图7中,彼此相邻的测量区域Z(3)和Z(4)的实像分别由实线和虚线表示。测量区域Z(i)的实像在k>n的范围内与测量区域Z(i+1)的实像重叠。使用重叠部分的数据的一部分或全部,用于图像调整。在k>n的范围内获得的实像数据之间执行内插,并且,可以使用通过内插获得的数据。在理想情况下,调整实像数据,使得重叠部分相互匹配。注意,以下描述:假定测量区域Z(3)的实像已被调整,调整测量区域Z(4)的实像以与测量区域Z(3)的实像匹配。
执行对测量区域的位置的调整(即,图7的水平轴方向上的调整),使得测量区域及其相邻区域的层析摄影图像(实线和虚线)的重叠部分的强度差被固定。即,为了使实线和虚线的重叠部分的强度差被固定(例如,使重叠部分的强度差的分散最小化),虚线在水平轴方向上偏移。如果在重叠部分中,在每一个实像中存在特定的峰值,那么可以执行调整,使得它们的峰值位置相互匹配。执行强度调整(即,图7的垂直轴方向上的调整),使得测量区域及其相邻区域的层析摄影图像(实线和虚线)的重叠部分的强度差最小。即,为了使实线和虚线的重叠部分的强度差最小(例如,使得重叠部分的强度差的绝对值的总值最小),虚线在垂直轴方向上偏移。注意,在图像调整中,可以只调整测量区域的位置和强度中的一个。如果测量区域的位置和强度二者均被调整,那么优选在调整位置之后调整强度。
在步骤S2-10中,将对于所有的测量区域获取的实像接合在一起。由此,在步骤S2-11中,可以获取希望的层析摄影图像。注意,当将实像接合在一起时,对于重叠的部分,可以使用它们的平均值,并且,可以忽略序号比n大的元素。
作为结果,可以平滑地连接每个测量区域的数据。这使得能够获得更加精确的层析摄影图像。
如上所述,根据本实施例的光学相干层析摄影装置,从相邻区域(与测量目标区域相邻的区域)中的层析摄影图像(实像)产生镜像。从测量目标区域的测量图像去除所获取的镜像。通过这种简单的方法,可以从测量图像去除镜像。由此,可以在短时间内获取层析摄影图像(实像)。
虽然已参照示例性实施例描述了本发明,但应理解,本发明不限于公开的示例性实施例。以下的权利要求的范围应被赋予最宽的解释,以包含所有这些变更方式和等同的结构和功能。
Claims (10)
1.一种光学相干层析摄影方法,所述光学相干层析摄影方法将来自光源的光分成测量光和参考光,并且基于参考光和返回光的相干光的波长谱获取待测对象的层析摄影图像,所述返回光是在将测量光照射到待测对象上时从待测对象返回的,所述光学相干层析摄影方法包括以下步骤:
将待测对象分成在测量光的照射方向上彼此相邻的多个测量区域,并且基于相干光的波长谱,对于每个测量区域获取测量图像;以及
通过从测量图像去除相邻区域的层析摄影图像的镜像,对于每个测量区域获取层析摄影图像,
其中,所述相邻区域与所述测量区域相邻而以相干门作为边界,并且,所述镜像是通过关于所述相干门反转所述相邻区域的层析摄影图像而获得的图像;或者,当获取测量图像时,相对于测量区域和测量区域的相邻区域之间的边界,所述相干门的位置被设置在相邻区域侧。
2.根据权利要求1所述的光学相干层析摄影方法,其中
在获取测量图像的步骤中,将所述多个测量区域设定为使得第一测量区域被设置在待测对象的端部,并且,在测量光的照射方向上顺序地布置第一到第X测量区域,其中X是大于1的整数,以及
在对于每个测量区域获取层析摄影图像的步骤中,对于第一测量区域,采用测量图像作为层析摄影图像,并且,对于第二到第X测量区域,依次地,通过从第Y测量区域的测量图像去除第(Y-1)测量区域的层析摄影图像的镜像,获取第Y测量区域的层析摄影图像,其中2≤Y≤X。
3.根据权利要求1或2所述的光学相干层析摄影方法,其中,测量区域的在照射方向上的宽度小于在获取该测量区域的测量图像时的焦点深度的一半。
4.根据权利要求1或2所述的光学相干层析摄影方法,还包括根据基于衰减函数确定的校正函数校正测量图像的步骤,所述衰减函数代表关于测量区域中的在照射方向上的位置的强度变化,以及
其中,在对于每个测量区域获取层析摄影图像时,通过从校正后的测量图像去除相邻区域的层析摄影图像的镜像,获取每个测量区域的层析摄影图像。
5.根据权利要求4所述的光学相干层析摄影方法,其中,对于每个测量区域,校正函数不同。
6.根据权利要求1或2所述的光学相干层析摄影方法,进一步包括对于每个测量区域调整层析摄影图像的强度和/或测量区域的在照射方向上的位置的步骤。
7.根据权利要求6所述的光学相干层析摄影方法,其中
在比测量区域大的范围中获取测量图像;以及
当对于每个测量区域调整测量区域的在照射方向上的位置时,将所述位置调整为使得测量区域及其相邻区域的层析摄影图像的重叠部分的强度差被固定。
8.根据权利要求6所述的光学相干层析摄影方法,其中
在比测量图像的测量区域大的范围中获取测量图像;以及
当对于每个测量区域调整层析摄影图像的强度时,将该强度调整为使得测量区域及相邻区域的层析摄影图像的重叠部分的强度差最小。
9.根据权利要求1所述的光学相干层析摄影方法,其中,
在所述多个测量区域中的处于待测对象端部的第一测量区域是与第二测量区域相邻的相邻区域的情况下:
在对于每个测量区域获取层析摄影图像的步骤中,所述第一测量区域的测量图像被采用作为第一测量区域的层析摄影图像,并且,通过从第二测量区域的测量图像去除第一测量区域的层析摄影图像的镜像而获取所述第二测量区域的层析摄影图像。
10.一种光学相干层析摄影装置,所述光学相干层析摄影装置将来自光源的光分成测量光和参考光,并且基于参考光和返回光的相干光的波长谱获取待测对象的层析摄影图像,所述返回光是在将测量光照射到待测对象上时从待测对象返回的,所述光学相干层析摄影装置包括:
测量图像获取单元,被配置为在待测对象被分成在测量光的照射方向上彼此相邻的多个测量区域的状态下,基于相干光的波长谱,对于每个测量区域获取测量图像;以及
层析摄影图像获取单元,被配置为通过从测量图像去除相邻区域的层析摄影图像的镜像,对于每个测量区域获取层析摄影图像,
其中,所述相邻区域与所述测量区域相邻而以相干门作为边界,并且,所述镜像是通过关于所述相干门反转所述相邻区域的层析摄影图像而获得的图像;或者,当获取测量图像时,相对于测量区域和测量区域的相邻区域之间的边界,所述相干门的位置被设置在相邻区域侧。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009053794A JP5605999B2 (ja) | 2009-03-06 | 2009-03-06 | 光干渉断層撮像方法および装置 |
| JP2009-053794 | 2009-03-06 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101822527A CN101822527A (zh) | 2010-09-08 |
| CN101822527B true CN101822527B (zh) | 2012-10-10 |
Family
ID=42173335
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201010123802.3A Expired - Fee Related CN101822527B (zh) | 2009-03-06 | 2010-03-02 | 光学相干层析摄影方法和光学相干层析摄影装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8390819B2 (zh) |
| EP (1) | EP2226608B1 (zh) |
| JP (1) | JP5605999B2 (zh) |
| CN (1) | CN101822527B (zh) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5306075B2 (ja) * | 2008-07-07 | 2013-10-02 | キヤノン株式会社 | 光干渉断層法を用いる撮像装置及び撮像方法 |
| JP5605998B2 (ja) * | 2009-03-06 | 2014-10-15 | キヤノン株式会社 | 光干渉断層撮像方法および装置 |
| JP5036785B2 (ja) * | 2009-10-23 | 2012-09-26 | キヤノン株式会社 | 光断層画像生成方法及び光断層画像生成装置 |
| JP4902721B2 (ja) * | 2009-10-23 | 2012-03-21 | キヤノン株式会社 | 光断層画像生成装置及び光断層画像生成方法 |
| JP5416577B2 (ja) * | 2009-12-25 | 2014-02-12 | 株式会社ニデック | 網膜機能計測装置 |
| JP5783681B2 (ja) * | 2010-03-31 | 2015-09-24 | キヤノン株式会社 | 撮像装置及び撮像方法 |
| JP2011257160A (ja) | 2010-06-04 | 2011-12-22 | Canon Inc | 光干渉断層撮像装置、光干渉断層撮像方法、およびプログラム |
| JP2012042348A (ja) | 2010-08-19 | 2012-03-01 | Canon Inc | 断層画像表示装置およびその制御方法 |
| JP5733960B2 (ja) | 2010-11-26 | 2015-06-10 | キヤノン株式会社 | 撮像方法および撮像装置 |
| US8517537B2 (en) | 2011-01-20 | 2013-08-27 | Canon Kabushiki Kaisha | Optical coherence tomographic imaging method and optical coherence tomographic imaging apparatus |
| JP5782262B2 (ja) * | 2011-01-20 | 2015-09-24 | キヤノン株式会社 | 断層画像補正方法および断層画像補正装置 |
| US9161690B2 (en) | 2011-03-10 | 2015-10-20 | Canon Kabushiki Kaisha | Ophthalmologic apparatus and control method of the same |
| JP5901124B2 (ja) | 2011-03-10 | 2016-04-06 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| TWI473037B (zh) * | 2011-10-11 | 2015-02-11 | Univ Nat Taiwan | 鏡像消除方法 |
| JP6007527B2 (ja) * | 2012-03-13 | 2016-10-12 | 株式会社ニデック | 眼底撮影装置 |
| CN104755908B (zh) * | 2012-07-27 | 2017-12-12 | 统雷有限公司 | 敏捷成像系统 |
| EP2929327B1 (en) | 2012-12-05 | 2019-08-14 | Perimeter Medical Imaging, Inc. | System and method for wide field oct imaging |
| US8939582B1 (en) * | 2013-07-12 | 2015-01-27 | Kabushiki Kaisha Topcon | Optical coherence tomography with dynamic focus sweeping and windowed averaging |
| US9545199B2 (en) * | 2013-09-24 | 2017-01-17 | Carl Zeiss Meditec, Inc. | Apparatus and methods for detecting optical components and their misalignment in optical coherence tomographic systems |
| CN103799975B (zh) * | 2014-02-26 | 2015-11-18 | 中国科学院光电技术研究所 | 采用相干门波前传感器的自适应光学oct视网膜成像仪 |
| JP6444080B2 (ja) * | 2014-07-14 | 2018-12-26 | キヤノン株式会社 | Oct装置およびその制御方法 |
| WO2019014767A1 (en) | 2017-07-18 | 2019-01-24 | Perimeter Medical Imaging, Inc. | SAMPLE CONTAINER FOR STABILIZING AND ALIGNING EXCISED ORGANIC TISSUE SAMPLES FOR EX VIVO ANALYSIS |
| JP7279379B2 (ja) * | 2018-08-02 | 2023-05-23 | 株式会社ニデック | Oct装置及びoct画像処理プログラム |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19814057B4 (de) | 1998-03-30 | 2009-01-02 | Carl Zeiss Meditec Ag | Anordnung zur optischen Kohärenztomographie und Kohärenztopographie |
| JP2000046729A (ja) * | 1998-07-31 | 2000-02-18 | Takahisa Mitsui | 波長分散を用いた高速光断層像計測装置および計測方法 |
| US7349098B2 (en) * | 2001-05-07 | 2008-03-25 | University Of Washington | Simultaneous beam-focus and coherence-gate tracking for real-time optical coherence tomography |
| JP2005283155A (ja) * | 2004-03-26 | 2005-10-13 | Shimizu Kimiya | 光干渉断層像撮像法における分散補正装置 |
| JP4425747B2 (ja) * | 2004-08-30 | 2010-03-03 | フジノン株式会社 | 仮想接面測定用の干渉計装置 |
| JP2006122649A (ja) * | 2004-09-30 | 2006-05-18 | Nidek Co Ltd | 被検物体の測定方法、及び該方法を用いた眼科装置 |
| JP2006201087A (ja) * | 2005-01-21 | 2006-08-03 | Nippon Telegr & Teleph Corp <Ntt> | オプティカル・コヒーレント・トモグラフィ装置 |
| US7330270B2 (en) * | 2005-01-21 | 2008-02-12 | Carl Zeiss Meditec, Inc. | Method to suppress artifacts in frequency-domain optical coherence tomography |
| US7823782B2 (en) | 2005-11-22 | 2010-11-02 | Shofu Inc. | Dental optical coherence tomograph |
| JP4890878B2 (ja) * | 2006-02-16 | 2012-03-07 | 株式会社トプコン | 眼底観察装置 |
| CN100520361C (zh) * | 2006-07-05 | 2009-07-29 | 中国科学院上海光学精密机械研究所 | 全深度探测的频域光学相干层析成像的方法及其系统 |
| JP2008253493A (ja) * | 2007-04-04 | 2008-10-23 | Fujifilm Corp | 断層画像処理方法および装置ならびにプログラム |
| JP5448353B2 (ja) | 2007-05-02 | 2014-03-19 | キヤノン株式会社 | 光干渉断層計を用いた画像形成方法、及び光干渉断層装置 |
| WO2010009450A1 (en) * | 2008-07-18 | 2010-01-21 | Doheny Eye Institute | Optical coherence tomography device, method, and system |
-
2009
- 2009-03-06 JP JP2009053794A patent/JP5605999B2/ja not_active Expired - Fee Related
-
2010
- 2010-02-04 EP EP10152652.3A patent/EP2226608B1/en not_active Not-in-force
- 2010-02-22 US US12/709,731 patent/US8390819B2/en not_active Expired - Fee Related
- 2010-03-02 CN CN201010123802.3A patent/CN101822527B/zh not_active Expired - Fee Related
Non-Patent Citations (1)
| Title |
|---|
| Ruikang K. Wang,et al..《In vivo full range complex Fourier domain optical coherence tomography》.《Applied Physics Letters 》.2007,第90卷054103-1 至 054103-3. * |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5605999B2 (ja) | 2014-10-15 |
| EP2226608A1 (en) | 2010-09-08 |
| JP2010210268A (ja) | 2010-09-24 |
| EP2226608B1 (en) | 2013-05-29 |
| US8390819B2 (en) | 2013-03-05 |
| US20100226554A1 (en) | 2010-09-09 |
| CN101822527A (zh) | 2010-09-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101822527B (zh) | 光学相干层析摄影方法和光学相干层析摄影装置 | |
| CN101822530B (zh) | 光学相干层析摄影方法和光学相干层析摄影装置 | |
| JP5255524B2 (ja) | 光断層像撮影装置、光断層像処理装置。 | |
| JP5331395B2 (ja) | 光断層像撮影装置 | |
| US8721078B2 (en) | Fundus photographing apparatus | |
| EP2633802B1 (en) | Method for taking a tomographic image of an eye | |
| JP6703730B2 (ja) | 光コヒーレンストモグラフィ装置、および光コヒーレンストモグラフィ制御プログラム | |
| US20200297209A1 (en) | Imaging apparatus and control method therefor | |
| CN103402421B (zh) | 用于连续拍摄不同深度的干涉测量深度断面图像、分析眼睛的方法和装置 | |
| JP2019063242A (ja) | Oct装置、および、眼科用画像処理プログラム | |
| EP3216388B1 (en) | Ophthalmologic apparatus and imaging method | |
| JP2016127901A (ja) | 光断層撮像装置、その制御方法、及びプログラム | |
| JP5948757B2 (ja) | 眼底撮影装置 | |
| JP2018186930A (ja) | 眼科撮影装置 | |
| JP5990932B2 (ja) | 眼光断層画像撮像装置 | |
| JP5987355B2 (ja) | 眼光断層画像撮像装置 | |
| JP6544071B2 (ja) | 光コヒーレンストモグラフィ装置、および光コヒーレンストモグラフィ制御プログラム | |
| JP2017225599A (ja) | Oct装置 | |
| JP2023030467A (ja) | 眼科撮影装置及び眼科撮影プログラム | |
| JP2020103425A (ja) | 眼科装置、及びその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20121010 Termination date: 20200302 |