BRPI1008733B1 - elevador com uma unidade de comando e processo de comunicação de um elevador com uma unidade de comando - Google Patents
elevador com uma unidade de comando e processo de comunicação de um elevador com uma unidade de comando Download PDFInfo
- Publication number
- BRPI1008733B1 BRPI1008733B1 BRPI1008733-8A BRPI1008733A BRPI1008733B1 BR PI1008733 B1 BRPI1008733 B1 BR PI1008733B1 BR PI1008733 A BRPI1008733 A BR PI1008733A BR PI1008733 B1 BRPI1008733 B1 BR PI1008733B1
- Authority
- BR
- Brazil
- Prior art keywords
- microprocessor
- control unit
- code
- bus
- rfid
- Prior art date
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B13/00—Doors, gates, or other apparatus controlling access to, or exit from, cages or lift well landings
- B66B13/22—Operation of door or gate contacts
Landscapes
- Indicating And Signalling Devices For Elevators (AREA)
- Control By Computers (AREA)
- Elevator Control (AREA)
- Remote Monitoring And Control Of Power-Distribution Networks (AREA)
Abstract
ELEVADOR COM SISTEMA DE MONITORAMENTO. A presente invenção refere-se a um elevador que possui uma unidade de comando (10), um barramento (9), ao menos um primeiro microprocessador (4, 5) e um segundo microprocessador (4, 5) que são alocados a um nó de barramento (30) e que através do barramento (9) estão unidos com a unidade de comando (10). A unidade de comando (10) transmite uma instrução através do barramento (9) para o segundo processador (4, 5) no sentido de interromper uma transmissão de sinal para o primeiro microprocessador (4, 5), de maneira que o primeiro microprocessador (4, 5) envie um comunicado de estado para a unidade de comando.
Description
[001] A presente invenção refere-se a um elevador com uma unidade de comando e um processo de comunicação de um elevador com uma unidade de comando.
[002] O documento W003/107295 apresenta um sistema de monitoramento para controle do funcionamento de aparelhos periféricos, por exemplo, componentes de elevadores. Para este fim, o sistema de barramento dispõe de um barramento, uma unidade de comando central que está unida com o barramento e dispõe também de vários aparelhos periféricos. Cada um desses aparelhos está aplicado em um nó de barramento e através desse barramento se comunica com a unidade de comando. A cada momento, os aparelhos periféricos ocupam um status determinado. A unidade de comando consulta através do barramento o status de cada aparelho periférico, sendo essa consulta feita periodicamente.
[003] Um barramento será abastecido por uma unidade de comando com energia e alimenta laços de indução eletromagnéticos que fazem parte de um nó de barramento. Os diferentes aparelhos periféricos estão acoplados através de uma antena local nos laços de indução dos nós de barramento e recebem energia eletromagnética através do laço de indução alocado. Através do laço de indução, o aparelho periférico da unidade de comando, a cada consulta, também comunica o seu código de identificação, bem como o seu tato momentâneo. Graças a estes códigos de identificação, a unidade de comando pode alocar os tatos interpretados a um aparelho periférico determinado.
[004] A vantagem de um sistema de um monitoramento desta natureza é a conexão simples entre o barramento e os aparelhos periféricos através dos laços de indução. É eliminado um cabeamento complexo e dispendioso dos aparelhos periféricos.
[005] Não obstante, é desvantajosa a consulta periódica do status dos aparelhos periféricos através do barramento. Como a unidade de comando consulta de forma ativa cada aparelho periférico, o barramento transmite para cada consulta e para cada aparelho periférico dois sinais. No caso de ciclos de consulta relativamente curtos, precisamente nos aparelhos periféricos relevantes para segurança, e com um número relativamente grande desses aparelhos, entre a unidade de comando e os aparelhos periféricos é intercambiado grande número de sinais. Isto quer dizer que a unidade de comando dispõe de elevadas capacidades de cálculo para processar todos os sinais. Além disso, o barramento é solicitado intensamente e, para poder transferir todas as consultas de status, oferece elevadas capacidades de transmissão de sinal. De modo correspondente, a unidade de comando, bem como o barramento são dispendiosos.
[006] Por isso, constitui tarefa da presente invenção aprimorar adicionalmente sistema de monitoramento conhecidos para o elevador.
[007] A tarefa acima mencionada será solucionada pela invenção.
[008] De acordo com exemplo de execução, o elevador dispõe de uma unidade de comando, de um barramento, ao menos de um primeiro microprocessador e um segundo microprocessador alocado a um nó de barramento e que estão unidos com a unidade de comando através do barramento. O elevador destaca-se pelo fato de que a unidade de comando transmite uma instrução através do barramento para o segundo microprocessador, no sentindo de interromper uma transmissão de sinal para o primeiro microprocessador, de modo que o pri- meiro microprocessador envie um comunicado de estado para a unidade de comando.
[009] A vantagem deste elevador reside no exame simples e confiável da capacidade funcional do primeiro microprocessador. No caso, o comportamento de resposta espontâneo do primeiro microprocessador é provocado pelo fato do segundo microprocessador interromper a transmissão do sinal de estado para o primeiro microprocessador e, por exemplo, simular o aparecimento de um estado de perigo.
[010] Segundo uma modalidade preferida, é alocado ao nó de barramento no elevador ao menos o elemento com código e ao menos um elemento que interpreta o código. O elemento que interpreta o código lê, sem contato, um código de identificação do elemento com o código e envia um sinal para o primeiro microprocessador.
[011] Preferencialmente, o elemento com o código e o elemento que interpreta o código possuem cada qual um laço indutivo. O elemento leitor do código abastece o elemento portador do código através dos dois laços indutivos, isento de contato suprindo energia eletromagnética. O elemento portador do código transmite seu código de identificação através dos dois laços de indução isento de contato para o elemento leitor do código.
[012] É especialmente vantajoso o monitoramento do estado sem contato de um componente de elevador. Os componentes sensoriais empregados, abrangendo o elemento portador do código e leitor do código, quase não apresentam desgaste na operação. Desta maneira, os custos de manutenção podem ser baixados e a segurança do monitoramento pode ser aumentada.
[013] Além disso, os elementos portadores de código e leitores de código, por exemplo, na modalidade como sistema RFID passivo, ou seja, ativo, podem ser obtidos como produto de massa sendo extremamente vantajosos.
[014] Em outra modalidade preferida, o elemento leitor do código transmite um sinal por meio de um condutor de dados para ao menos o primeiro microprocessador. O segundo microprocessador ativa uma chave para interromper o condutor de dados ou ativa uma chave para interromper um abastecimento de energia do elemento leitor do código. Finalmente, a unidade de comando confirma a comunicação do estado do primeiro microprocessador, baseado na interrupção da transmissão de sinal pelo segundo microprocessador.
[015] Caso a unidade de comando não puder confirmar o comunicado do estado provocado do primeiro microprocessador, deve-se partir do pressuposto que ao menos o primeiro ou o segundo microprocessador possui alguma função falha, não mais tendo segurança o monitoramento de estado.
[016] A vantagem deste teste reside em que é eliminada uma consulta continuada dos sinais de estados recebidos pelo primeiro microprocessador através da unidade de comando. Enquanto tiver sido verificada pela unidade de comando a qualidade funcional do primeiro microprocessador, será suficiente que o primeiro microprocessador transmita para a unidade do comando um comunicado de estado, somente quando se apresentar um estado potencialmente perigoso do elevador. Desta maneira, reduz-se o número de sinais a serem processados. Torna-se, portanto, possível empregar barramentos mais vantajosos e também unidades de comando.
[017] A seguir, a invenção será explicada baseada em exemplos de execução e desenhos sendo descrita mais detalhadamente. As figuras mostram:
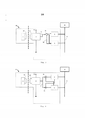
[018] a figura 1, que é o primeiro exemplo de execução do sistema de monitoramento com uma chave para interromper o condutor de dados;
[019] a figura 2, que é um segundo exemplo de execução do sistema de monitoramento com uma chave para interromper o abastecimento de energia para um elemento leitor de código;
[020] a figura 3, que é um terceiro exemplo de modalidade do sistema de monitoramento com uma chave para interromper um primeiro condutor de dados e o fechamento de um segundo condutor de dados;
[021] a figura 4, que é um quarto exemplo de execução do sistema de monitoramento com a variação redundante do valor do status com uma primeira chave para interromper um primeiro condutor de dados e uma segunda chave para interromper um segundo condutor de dados;
[022] a figura 5, que é um quinto exemplo de execução do sistema de monitoramento com a variação redundante do valor do status e uma chave para interromper o abastecimento de energia a um elemento leitor de código;
[023] a figura 6, que é um sexto exemplo de execução do sistema de monitoramento com a variação redundante do valor do status e duas chaves para interromper o abastecimento de energia até um elemento leitor de código;
[024] a figura 7, que é um sétimo exemplo de execução do sistema de monitoramento com dois sistemas RFID e uma primeira chave para interromper um primeiro condutor de dados, bem como uma segunda chave para interromper um segundo condutor de dados;
[025] a figura 8, que é um oitavo exemplo de execução do sistema de monitoramento com dois sistemas RFID e uma primeira chave para interromper o abastecimento de energia para um primeiro elemento leitor de código, bem como uma segunda chave para interromper o abastecimento de energia para um segundo elemento leitor de código;
[026] a figura 9, que é um nono exemplo de execução dos sistema de monitoramento com dois sistemas RFID e uma chave para in- terromper o abastecimento de energia com dois elementos leitores de código;
[027] a figura 10, que é um décimo exemplo de execução do sistema de monitoramento com dois sistemas RFID e uma chave para interromper o condutor de dados ou uma chave alternativa para interromper o abastecimento de energia para dois elementos leitores de código;
[028] a figura 11, que é um décimo primeiro exemplo de execução do sistema de monitoramento com dois sistemas RFID, com a variação redundante dos valores de status e uma primeira chave para interromper um primeiro condutor de dados, bem como uma segunda chave para interromper um segundo condutor de dados;
[029] a figura 12, que é um décimo segundo exemplo de execução do sistema de monitoramento com dois sistemas RFID, a variação redundante dos valores de status e uma chave para interromper o abastecimento de energia para dois elementos leitores de código;
[030] a figura 13, que é um décimo terceiro exemplo execução do sistema de monitoramento com dois sistemas RFID, a variação redundante dos valores de status e uma primeira chave para interromper o abastecimento de energia para um primeiro elemento de código, bem como uma segunda chave para interromper o abastecimento de energia para um segundo elemento leitor de código;
[031] a figura 14, que é um décimo quarto exemplo de execução do sistema de monitoramento com dois sistemas RFID, e uma chave para interromper um primeiro condutor de dados e fechamento de um segundo condutor de dados e
[032] a figura 15, que é um décimo quinto exemplo de execução de monitoramento com dois sistemas RFID, a variação redundante e uma primeira chave para interromper um primeiro condutor de dados e fechamento de um segundo condutor de dados, bem como uma segunda chave para interromper um terceiro condutor de dados e fechamento de um quarto condutor de dados.
[033] A figura 1 apresenta um primeiro exemplo de modalidade do sistema de monitoramento como é empregado, por exemplo, em um elevador. Uma unidade de comando 10 está unida com barramento 9. A unidade de comando 10 se comunica através do barramento com ao menos um nó de barramento 30. A unidade de comando 10, o barramento 9, e ao menos um nó de barramento 30 constituem um sistema de barramento. Dentro deste sistema de barramento, cada nó de barramento 30 possui um endereço claro e identificável. Por meio deste endereço, podem ser transmitidos sinais da unidade de comando 10 de modo controlado para um determinado nó de barramento 30. Da mesma maneira, sinais recebidos na unidade de comando 10 podem ser claramente alocados a um nó de barramento 30.
[034] Portanto, entre um nó de barramento 30 e a unidade de comando 10 podem ser enviados dados nas duas direções através do barramento 9. Para tanto, o nó de barramento 30 dispõe de ao menos dois microprocessadores 4 e 5. Os dois microprocessadores 4,5 são de tal modo conformados que o primeiro microprocessador 4 transmite ao menos informações de status para a unidade de comando 10 e o segundo microprocessador 5 recebe ao menos ordens de comando da unidade de comando 10.
[035] Os dois microprocessadores 4, 5 podem ser configurados tanto de forma física, como também virtual. No caso de dois microprocessadores 4, 5 fisicamente configurados, por exemplo, dois microprocessadores 4, 5 estão integrados em um molde. Em uma modalidade alternativa, os dois microprocessadores 4, 5 podem ser concretizados cada qual em um molde próprio. Mas, também fisicamente, pode estar previsto somente um microprocessador 4. Neste caso, um segundo microprocessador 5 pode ser virtualmente configurado por meio desoftware no primeiro microprocessador 4 fisicamente previsto.
[036] O nó de barramento 30 dispõe, além disso, ao menos de um elemento 1 portador de código e um elemento 3 leitor de código. Preferencialmente, o elemento 1 portador de código é um tag RFID 1 e o elemento 3 leitor de código é um sistema RFID 3.
[037] A seguir, serão explicados os exemplos de execução dos sistemas de monitoramento de acordo com as figuras 1 a 15, baseados em tags RFID 1 e sistemas RFID 3. Mas a pessoa versada na técnica tem um grande número de possibilidades técnicas à sua disposição para realizar uma transmissão sem contato de um código identificação entre um elemento portador de código e um elemento leitor de código. Assim, por exemplo, também podem ser empregadas em caráter alternativo combinações de elementos 1, 3 portadores de código e leitores de código, como portadores de código de barra e scaners a laser, alto-falantes e microfone, fita magnética e sensor de hall, ímã e sensor hall, ou respectivamente, fonte luminosa e sensor sensível à luz.
[038] Tanto o tag-RFID 1, como também o sistema RFID 3 dispõem cada qual de um laço de indução 2.1, 2.2. O sistema RFID 3 abastece o tag RFID 1 através desses laços de indução 2.1, 2.2 com energia eletromagnética. Para tanto, o sistema RFID 3 está acoplado em uma fonte de energia Vcc. A fonte de energia abastece o sistema RFID 3 preferencialmente ou com corrente elétrica ou tensão elétrica. Enquanto o tag RFID 1 for abastecido com energia, o tag RFID 1 envia através dos laços de indução 2.1, 2.2 um código de identificação memorizada no tag RFID 1 para o sistema RFID 3. O abastecimento de energia Vcc do tag RFID 1 está agora assegurado quando o tag RFID 1 se encontrar na proximidade espacial abaixo de uma distância critica em relação ao sistema RFID 3, e quando o laço de indução 2.1 do tag RFID 1 puder ser excitado pelo laço de indução 2.2 do sistema RFID 3. O abastecimento de energia Vcc do tag RFID 1 funciona, portanto somente abaixo de uma distância critica em relação ao sistema RFID 3. Caso seja ultrapassada esta distância critica, o tag RFID 1 não receberá suficiente energia para poder manter a transmissão do código de identificação para o sistema RFID 3.
[039] Através de um condutor de dados 6, o sistema RFID 3 está unido com o primeiro microprocessador 4 e transmite o código de identificação recebido para este primeiro microprocessador 4. O microprocessador 4 fará comparação do código de identificação com uma relação de códigos de identificação memorizada em uma memória. Nesta comparação, o microprocessador 4, de acordo com as normas memorizadas e na dependência do código de identificação, fará o cálculo de um valor de status. Este valor de status pode, no caso, representar o valor positivo ou um valor negativo. O valor de status negativo será gerado, por exemplo, quando nenhum código de identificação ou um código de identificação errado for transmitido para o microprocessador 4.
[040] Caso estiver presente um valor de status negativo, o microprocessador 4 envia um sinal através do barramento 9 para a unidade de comando 10. Este sinal contém ao menos o endereço do nó de barramento 30, bem como preferencialmente o código de identificação do tag RFID 1 detectado. Graças ao endereço informado, a unidade de comando 10 estará em condições de localizar a origem do valor de status negativo e inicia uma reação correspondente.
[041] O nó de barramento 30 controla, por exemplo, o status de uma porta do poço. O tag RFID 1 e o sistema RFID 3 estão de tal modo integrados na região das portas do poço que, no caso de a porta de poço estar fechada, a distância entre o tag RFID 1 e o sistema RFID 3 está situada abaixo da distância critica. O microprocessador 4 recebe, portanto, o código de identificação do sistema RFID 3 e gera um valor de status positivo. Caso a aporta do poço esteja aberta, o tag RFID 1 e o sistema RFID 3 ultrapassam a distância critica. Como agora o tag RFID 1 não mais é abastecido com energia elétrica pelo sistema RFID 3, o tag RFID paralisa a transmissão do seu código de identificação e o microprocessador 4 gera um valor de status negativo. De modo cor-respondente, o microprocessador 4 envia um sinal para a unidade de comando 10. Graças ao endereço de nó de barramento 30, a unidade de comando localiza a porta de poço aberta. Caso esta porta do poço esteja aberta de modo inadmissível, por exemplo não se encontrando cabine do elevador na região da porta do poço, a unidade de comando 10 iniciará uma reação para deslocar o elevador para uma posição segura.
[042] Por meio da tag RFID 1 e do sistema RFID 3 de um nó de barramento 30, podem ser controlados de modo semelhante ao status de outros componentes do elevador, como portas de cabine, trava- mento de porta, chave de paralisação emergencial ou chaves de deslocamento.
[043] A operação segura de um nó de barramento 30 depende basicamente da capacidade funcional do microprocessador 4. Por isso, um nó de barramento 30 será regularmente testado pela unidade de comando 10 para examinar o comportamento espontâneo de transmissão do microprocessador 4 no aparecimento do valor de status negativo.
[044] Para efeito de testar o nó de barramento 30, de acordo com a figura 1, a unidade de comando 10 envia uma ordem de comando através do barramento 9 para um segundo microprocessador 5 no sentido de abrir uma chave 31. No caso, esta chave 31 interrompe o condutor de dados 6 entre o sistema RFID 3 e o primeiro microprocessador 4. O microprocessador 4 não recebe código de identificação e gera um valor de status negativo. Será, portanto, simulado um "desa- parecimento" do tag RFID 1. No modo de funcionamento perfeito de microprocessador 4, este fará comunicação espontânea junto da unidade de comando 10.
[045] Este teste será repetido no tempo para cada nó de barramento 30. Como durante este teste a unidade de comando 10 não pode reconhecer informações reais sobre o status do nó de barramento 30 testado, o tempo do teste será mantido em um período de tempo mais curto possível e o teste será realizado somente tantas vezes quantas forem necessárias. No caso, o tempo do teste depende em ampla extensão da velocidade da transmissão de dados através do barramento 9 e do tempo de resposta dos microprocessadores 4, 5 e normalmente é de 1 a 100 ms. A frequência do teste será, primeiramente, de acordo com a probabilidade de falha do sistema global. Quanto mais confiável for o sistema global, tanto mais raramente este pode ser testado, a fim de ser assegurado um controle de status seguro de um componente do elevador.
[046] Normalmente, o teste será feito ao menos uma vez por dia. Mas este teste também poderá ser repetido na ordem de horas ou de minutos.
[047] Por conseguinte, outros exemplos de execução do sistema de monitoramento, inicialmente do nó de barramento 30, serão descritos. Como é comparável a estruturação básica do nó de barramento 30 e o modo do funcionamento dos componentes do barramento de 1 a 5, neste exemplo de execução, serão abordadas apenas as diferenças na estruturação e no modo de funcionamento dos nós de barramento 30 diferentes.
[048] A figura 2 apresenta um segundo exemplo de execução do sistema de monitoramento. Ao testar o nó de barramento 30, o segundo microprocessador 5 ativa uma chave 32. Com a chave 32 aberta, o abastecimento de energia Vcc do sistema RFID 3 será interrompido. Com a fonte de energia Vcc desligada, o sistema RFID 3 paralisa a transmissão do sinal do código de identificação através do condutor de dados 7 para o microprocessador 4.
[049] A figura 3 apresenta um terceiro exemplo de execução do sistema de monitoramento. Neste exemplo de execução, o segundo microprocessador 5 ativa, durante o teste do primeiro microprocessador 4, uma chave 33. Esta chave 33, em uma primeira posição de comutação, interliga o sistema RFID 3, através do condutor de dados 8, com o primeiro microprocessador 4, e em uma segunda posição de comutação, interliga os dois microprocessadores 4 e 5 por meio de outro condutor de dados 90. A vantagem deste exemplo de execução é que pode ser simulado não apenas um chamado "desaparecimento"do tag RFID 1, mas também o segundo microprocessador 5 também pode indicar previamente códigos de identificação variados. Isto será especialmente importante quando vários tags RFID 1 podem alcançar a região da recepção do sistema RFID 3 com códigos de identificação diversos. Dependendo de qual de código de identificação será lido pelo segundo microprocessador 4 este gerará um valor de status positivo ou negativo.
[050] A figura 4 apresenta um quarto exemplo de execução do sistema de monitoramento. Neste exemplo de execução, o sinal do código de identificação será captado de modo redundante através do condutor de dados 11, e pelos dois microprocessadores 4, 5, e é avaliado. Caso, portanto, ao menos um dos dois microprocessadores 4, 5 gerar um valor de status negativo, o nó de barramento 30 transmite um sinal para a unidade de comando 10. Uma vantagem deste quarto exemplo de execução reside na avaliação redundante, e, portanto, bem confiável do código de identificação.
[051] Ao testar o nó de barramento 30, o microprocessador 4, 5 interrompe o condutor de dados 11 entre o sistema RFID 3 e outro mi- croprocessador 5, 4 através de uma chave 34, 35. Durante o teste de um dos dois microprocessadores 4, 5, o microprocessador 4, 5 que ativa a chave 34, 35 continuará a ler o código de identificação real do tag RFID 1. Em comparação com os exemplos de execução acima descritos, o nó de barramento 30 continua, portanto, a estar em condições de enviar um sinal de status real para a unidade de comando 10. Portanto, durante o teste, a unidade de comando 10 reconhece comunicações de status negativos, de um microprocessador 4, 5 que, durante o teste, parecem como sendo reais. Em tal caso, não será, con-forme esperado, provocado durante o teste somente uma comunicação de status negativo, porém o nó de barramento 30 transmitiria dois sinais de status para a unidade de comando 10, ou seja, um status virtual e um status real. Na expectativa de apenas um sinal de status, a unidade de comando 10 reconhece, neste caso, que o nó de barramento 30 possui realmente um status negativo.
[052] As figuras 5 e 6 apresentam um quinto e um sexto exemplo de execução do sistema de monitoramento. De acordo com esses exemplos de execução, o sinal de código de identificação será avaliado pelos dois microprocessadores 4, 5 também em forma redundante através de um condutor de dados 12, 13.
[053] No quinto exemplo de execução, a unidade de comando 10, ao testar o nó de barramento 30, envia uma ordem de comando para abrir uma chave 36 para o segundo microprocessador 5. Na posição aberta da chave 36, será interrompido o abastecimento de energia Vcc para o sistema RFID 3. No sexto exemplo de execução, por sua vez, o abastecimento de energia Vcc do sistema RFID 3 poderá ser interrompido por duas chaves 37, 38, comutadas pelo segundo, ou seja, pelo primeiro microprocessador 5,4. Na ausência do sinal do código de identificação, tanto o primeiro, quanto como também o microprocessador 4, 5 da unidade de comando 10 enviam um sinal correspondente.
[054] Nos seguintes exemplos de execução, de acordo com as figuras 7 a 15, os sinais de código de identificação, lidos pelo sistema RFID 3a, 3b serão transmitidos por conjuntos de condutores de dados variáveis para ao menos um dos microprocessadores 4, 5. Além disso, também são representadas diferentes disposições de chaves para testar o nó de barramento 30.
[055] De acordo com esses exemplos de execução, o nó de barramento 30 dispõe de dois sistemas RFID 3a, 3b que abastecem através de um par de laços de indução 2.1a, 2.2a, 2.1b, 2.2b com energia elétrica, recebendo o código de identificação transmitido pelo tag RFID 1a, 1b.
[056] Nós de barramento 30 que dispõe de dois sistemas RFID 3a, 3b, ou seja, tags RFID 1a, 1b, podem controlar de forma redundante o status de elemento do elevador ou, no caso de dois status diferentes, podem preferencialmente controlar elementos de elevador espacialmente adjacentes. De modo correspondente, no caso de uma instalação de elevadores, por exemplo por meio de dois sistemas RIFD 3a, 3b e dois tags RFID 1a, 1b, poderão ser controlados o status de uma porta do poço de modo redundante, ou dois status de uma porta de cabine, bem como de um botão de alarme posicionado também em uma cabine do elevador.
[057] Nos exemplos de execução de acordo com as figuras 7 a 9, os dois sistemas RFID 3a, 3b transmitem o código de identificação detectada através de linhas de dados 14, 15, 16, 17, 18, 19 para o microprocessador 4, 5. Na figura 7, é mostrado o nó de barramento 30, cuja capacidade funcional se verifica através de interrupção recíproca da linda de dados 14, 15 por meio de uma chave 39, 40. De modo correspondente, um primeiro microprocessador 4 recebe da unidade de comando 10 a instrução de interromper o condutor de dados 15 para o segundo microprocessador 5, através da chave 40, e o segundo mi- croprocessador 5 recebe da unidade de comando 10 a instrução de interromper o condutor de dados 14 para o primeiro microprocessador 4, através da chave 39.
[058] Contrário ao exemplo de execução da figura 7, nas figura 8 e 9, é produzido o comportamento de reposta espontâneo dos microprocessadores 4, 5 pela interrupção do respectivo abastecimento de energia Vcca, Vccb para um sistema RFID 3a, 3b. No exemplo de execução, de acordo coma a figura 8, a unidade de comando 10 instrui um primeiro microprocessador 4, 5 de abrir e vice-versa uma chave 41,42 para abastecimento de energia Vcca, Vccb do sistema RFID 3b, 3a vinculado com o segundo microprocessador 5, 4.
[059] No exemplo de execução, de acordo com a figura 9, por outro lado, os dois microprocessadores 4, 5 ativam a mesma chave 43 que interrompe o suprimento do abastecimento de energia Vcc para os dois sistemas RFID 3a, 3b. Quando por exemplo o primeiro microprocessador 4 abrir a chave 43, será feita espontaneamente uma comunicação não somente do segundo microprocessador 5 na unidade de comando 10, mas também do primeiro microprocessador 4. Da mesma maneira, ambos os microprocessadores 4, 5 se comunicam com a unidade de comando 10 quando a chave 43 do segundo microprocessador 5 for ativada.
[060] A figura 10 apresenta um exemplo de execução, no qual dois sistemas RFID 3a, 3b transmitem o seu código de identificação através de um condutor de dados 20 para um primeiro microprocessador 4. Um segundo microprocessador 5 testa a incapacidade funcional do primeiro microprocessador 4. Neste teste, o segundo microprocessador 5 ativa uma chave 44 e interrompe, desta maneira, o condutor de dados 20. Em uma disposição alternativa da chave 45, o segundo microprocessador 5 interrompe através da chave 74 o abastecimento de energia Vcc dos dois sistemas RFID 3a, 3b. Esta modalidade alternativa de teste está mostrada na figura 10 com linhas pontilhadas.
[061] As figuras 11 a 13 também apresentam um exemplo de execução de sistemas de monitoramento que dispõe de dois sistemas RFID 3a, 3b, cada qual abastecendo um tag RFID 1a, 1b com energia, e que fazem a leitura de seus códigos de identificação. A avaliação dos códigos de identificação interpretados se verifica no caso de modo redundante, porque os dois sistemas RFID transmitem o código de identificação respectivo que foi lido através de um condutor de dados 21, 22, 23, 24, 25, 26 tanto para o primeiro microprocessador 4, como também para o segundo microprocessador 5. O nó de barramento 30, de acordo com um desses três exemplos de execução, será, todavia testado de modo diferente.
[062] Na figura 11, o primeiro microprocessador 4 comanda uma chave 47 para abrir o condutor de dados 22 entre o segundo microprocessador 5 e os dois sistemas RFID 3a, 3b. No caso, será testado o comportamento de resposta espontâneo do microprocessador 5. O segundo microprocessador 5, por sua vez, abre, durante o teste do primeiro microprocessador 4, por meio de outra chave 46, o condutor de dados 21 entre o primeiro microprocessador 4 e os sistemas RFID 3a, 3b, instruindo esta unidade que envie um sinal para a unidade de comando 10.
[063] No exemplo de execução, de acordo com a figura 12, nos testes dos microprocessadores 4, 5, será interrompido o abastecimento de energia Vcc dos sistemas RIFD 3a, 3b através de uma chave 48. Esta chave será sempre ativada por um microprocessador 4, 5. Se a chave 48 for ativada, os dois microprocessadores 4, 5 transmitem um sinal para a unidade de comando 10.
[064] O exemplo de execução da figura 13 se diferencia daquele da figura 12 no sentido de que os sistemas RFID 3a, 3b dispõem cada qual de um abastecimento próprio Vcca e Vccb. Além disso, cada um desses abastecimentos de energia Vcca, Vccb pode ser desligado separadamente por uma chave 49, 50 separada. Isto verifica-se sempre por um dos microprocessadores 4, 5. Na figura 13, por exemplo, o microprocessador 4 ativa a chave 50 do abastecimento de energia Vccb e o microprocessador 5 ativa a chave 49 do abastecimento de energia Vcca. Quando os microprocessadores 4, 5 funcionam perfeitamente, estes se comunicam simultaneamente na ativação de uma chave 49, 50, já que, por exemplo na interrupção do abastecimento de energia Vcca, o sistema RFID 3a é inativo e correspondentemente o código de identificação não é transmitido nem para o primeiro microprocessador 4, e nem para o segundo microprocessador 5 por meio dos condutores de dados 25, 26.
[065] As figuras 14 e 15 representam outros exemplos de execução do sistema de monitoramento. No primeiro exemplo de execução, de acordo com a figura 14, no teste do primeiro microprocessador 4, o segundo microprocessador 5 ativa uma chave 51. Em uma primeira posição de comutação, esta chave 51 liga os sistemas RFID 3a, 3b por meio do condutor de dados 27 com o primeiro microprocessador 4 e, em uma segunda posição da chave, liga os dois microprocessadores 4 e 5 através de outro condutor de dados 91. No exemplo de execução, de acordo com a figura 15, sempre um dos dois microprocessadores 4, 5 ativa uma chave 52, 53 que, em uma primeira posição de comutação, interliga o sistema RFID 3a, 3b, através de um condutor de dados 28, 29, com o outro microprocessador 5, 4. Em uma segunda posição de comutação, sempre um dos microprocessadores 4, 5 será unido com outro microprocessador 5, 4 sempre através de outro condutor de dados 92, 93.
[066] A vantagem desses dois exemplos de execução reside no fato de que pode ser simulado não somente o desaparecimento dos tags RFID 1a, 1b, mas igualmente o fato de que o microprocessador 4, 5 que ativa a chave também pode indicar previamente diferentes códigos de identificação para o outro microprocessador 5, 4. Isto é especialmente importante quando vários tags RFID 1a, 1b podem alcançar com códigos de identificações diferentes a região da recepção do sistema RFID 3a, 3b. Dependendo de qual o código de identificação for lido pelo primeiro ou pelo segundo microprocessador 4,5, será gerado um valor de status positivo ou negativo.
Claims (11)
1. Elevador com uma unidade de comando (10), um barramento (9), ao menos um primeiro microprocessador (4, 5) e um segundo microprocessador (4, 5), alocados a um nó de barramento (30) e que através do barramento (9) estão unidos com a unidade de comando (10), caracterizado pelo fato de que a unidade de comando (10) transmite uma instrução através do barramento (9) para o segundo microprocessador (4, 5), para interromper uma transmissão de sinal para o primeiro microprocessador (4, 5), de maneira que o primeiro microprocessador (4, 5) envie um comunicado de estado para a unidade de comando (10).
2. Elevador, de acordo com a reivindicação 1, caracterizado pelo fato de que ao menos um elemento (1) portador de código e ao menos um elemento (3) leitor de código estão alocados aos nós de barramento (30), o elemento leitor de código (3) realiza a leitura sem contato de um código de identificação a partir do elemento portador de código (1) e o elemento (3) leitor de código envia um sinal para o primeiro microprocessador (4, 5).
3. Elevador, de acordo com a reivindicação 2, caracterizado pelo fato de que o elemento portador de código (1) e o elemento (3) leitor de código dispõem cada qual de um laço de indução (2.1, 2.2), o elemento leitor de código (3) abastece o elemento portador de código (1), através dos dois laços de indução (2.1, 2.2) isento de contato, com energia eletromagnética, e o elemento (1) portador do código transmite seu código de identificação por meio dos dois laços de indução (2.1, 2.2) sem contato para o elemento (3) leitor de código.
4. Elevador, de acordo com qualquer uma das reivindicações 2 ou 3, caracterizado pelo fato de que o elemento (3) leitor de código transmite o sinal por meio de um condutor de dados (6) ao menos para o primeiro microprocessador (4, 5).
5. Elevador, de acordo com qualquer uma das reivindicações 2 a 4, caracterizado pelo fato de que o segundo microprocessador (4, 5) ativa uma chave (31) para interromper o condutor de dados (6) ou uma chave (32) para interromper um abastecimento de energia (Vcc) do elemento (3) leitor de código.
6. Elevador, de acordo com qualquer uma das reivindicações 1 a 5, caracterizado pelo fato de que a unidade de comando (10) confirma a comunicação de estado do primeiro microprocessador (4, 5), em virtude da interrupção da transmissão de sinal pelo segundo microprocessador (4, 5).
7. Processo de comunicação de um elevador com uma unidade de comando (10), um barramento (9), ao menos um primeiro microprocessador (4, 5) e um segundo microprocessador (4, 5), alocados a um nó de barramento (30) e que através do barramento (9) estão unidos com a unidade de comando (10), caracterizado pelo fato de que o processo abrange as seguintes etapas: - uma instrução será transmitida pela unidade de comando (10) para o segundo microprocessador (4, 5). - baseado nesta instrução, uma transmissão de sinal para o primeiro microprocessador (4, 5) será interrompida pelo segundo microprocessador (4, 5), e - uma comunicação de estado será enviada pelo primeiro microprocessador (4, 5) para a unidade de comando (10).
8. Processo de comunicação, de acordo com a reivindicação 7, com ao menos um elemento (1) portador de código e ao menos um elemento (3) leitor de código, alocados ao nó de barramento (30), caracterizado pelo fato de que - um código de identificação do elemento (1) portador de código é lido, sem contato, pelo elemento (3) leitor de código, e - um sinal, derivado do código de identificação, será envia- do para o primeiro microprocessador (4, 5) pelo elemento (3) leitor de código.
9. Processo de comunicação, de acordo com a reivindicação 8, caracterizado pelo fato de que - o sinal é transmitido através de um condutor de dados (6) do elemento (3) leitor de código ao menos para o primeiro microprocessador (4, 5).
10. Processo de comunicação, de acordo com a reivindicação 9, caracterizado pelo fato de que - uma chave (31) é ativada pelo segundo microprocessador (4, 5) para interromper o condutor de dados (6), ou - uma chave (32) é ativada pelo segundo microprocessador (4, 5) para interromper um abastecimento de energia (Vcc) do elemento (3) leitor de código.
11. Processo de comunicação, de acordo com qualquer uma das reivindicações 7 a 9, caracterizado pelo fato de que - o comunicado de estado do primeiro microprocessador (4, 5), baseado na interrupção da transmissão de sinal pelo segundo microprocessador (4, 5), é confirmado pela unidade de comando (10).
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP09153654.0 | 2009-02-25 | ||
| EP09153654 | 2009-02-25 | ||
| PCT/EP2010/052332 WO2010097404A1 (de) | 2009-02-25 | 2010-02-24 | Aufzug mit einem überwachungssystem |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BRPI1008733A2 BRPI1008733A2 (pt) | 2016-06-28 |
| BRPI1008733B1 true BRPI1008733B1 (pt) | 2020-11-10 |
Family
ID=40756854
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BRPI1008733-8A BRPI1008733B1 (pt) | 2009-02-25 | 2010-02-24 | elevador com uma unidade de comando e processo de comunicação de um elevador com uma unidade de comando |
Country Status (12)
| Country | Link |
|---|---|
| US (1) | US8807284B2 (pt) |
| EP (1) | EP2401221B1 (pt) |
| CN (1) | CN102333717B (pt) |
| AU (1) | AU2010217638B2 (pt) |
| BR (1) | BRPI1008733B1 (pt) |
| DK (1) | DK2401221T3 (pt) |
| ES (1) | ES2432497T3 (pt) |
| HK (1) | HK1160437A1 (pt) |
| PL (1) | PL2401221T3 (pt) |
| RU (1) | RU2524319C2 (pt) |
| SG (1) | SG173848A1 (pt) |
| WO (1) | WO2010097404A1 (pt) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8556043B2 (en) * | 2007-12-03 | 2013-10-15 | Otis Elevator Company | Passive detection of persons in elevator hoistway |
| FI120449B (fi) * | 2008-08-12 | 2009-10-30 | Kone Corp | Järjestely ja menetelmä hissikorin paikan määrittämiseksi |
| FI122474B (fi) * | 2010-12-01 | 2012-02-15 | Kone Corp | Hissin turvakytkentä sekä menetelmä hissin turvakytkennän toiminnallisen poikkeaman tunnistamiseksi |
| SG2014008825A (en) * | 2011-08-11 | 2014-04-28 | Inventio Ag | Test method for an elevator system and a monitoring device for carrying out the test method |
| CA2823833C (en) | 2011-08-11 | 2019-12-24 | Inventio Ag | Function-monitoring of a safety element |
| EP2607286A1 (de) * | 2011-12-19 | 2013-06-26 | Inventio AG | Testverfahren einer Aufzugsanlage und eine Überwachungseinrichtung zum Durchführen des Testverfahrens |
| ES2687898T3 (es) * | 2013-10-23 | 2018-10-29 | Inventio Ag | Procedimiento y dispositivo para la puesta en servicio de una instalación de ascensor |
| EP2930134B1 (en) | 2014-04-09 | 2018-05-30 | Kone Corporation | Safety system and method for testing safety critical components in an elevator system |
| WO2016091780A1 (de) * | 2014-12-12 | 2016-06-16 | Inventio Ag | Verfahren und vorrichtung zur inbetriebnahme einer aufzugsanlage |
| RU2696647C2 (ru) * | 2014-12-18 | 2019-08-05 | Инвенцио Аг | Способ эксплуатации системы безопасности со временными пользователями |
| US10214384B2 (en) * | 2014-12-18 | 2019-02-26 | Inventio Ag | Method for operating an elevator safety system with temporary participants |
| WO2016096829A1 (de) * | 2014-12-18 | 2016-06-23 | Inventio Ag | Verfahren zum betreiben eines elektronischen sicherheitssystems mit temporären teilnehmern |
| MY190853A (en) | 2015-09-25 | 2022-05-12 | Inventio Ag | Surveillance device for a lift system |
| SG11201803265YA (en) * | 2015-11-19 | 2018-06-28 | Inventio Ag | Method for determining information relating to lift components received in a lift shaft |
| WO2017108525A1 (de) * | 2015-12-21 | 2017-06-29 | Inventio Ag | Überwachungsvorrichtung für eine personentransportanlage, prüfverfahren und personentransportanlage |
| US10112802B2 (en) * | 2017-01-30 | 2018-10-30 | Otis Elevator Company | Elevator service person collision protection system |
| EP3608279A1 (en) * | 2018-08-10 | 2020-02-12 | Otis Elevator Company | Device and method for monitoring the movement of an elevator door using rfid |
| EP3825706B1 (en) | 2019-11-25 | 2023-09-27 | Otis Elevator Company | Electronic test nodes for automatic check of a safety chain |
| CN113942908A (zh) * | 2020-07-16 | 2022-01-18 | 奥的斯电梯公司 | 层门安全电路的故障定位 |
| CN112897270B (zh) * | 2021-02-05 | 2023-03-24 | 浙江理工大学 | 一种基于退化状态监测的电梯检测和维修方法 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55106976A (en) * | 1979-02-02 | 1980-08-16 | Hitachi Ltd | Controller for elevator |
| JPS58144071A (ja) * | 1982-02-23 | 1983-08-27 | 三菱電機株式会社 | エレベ−タの制御装置 |
| US4567560A (en) * | 1983-09-09 | 1986-01-28 | Westinghouse Electric Corp. | Multiprocessor supervisory control for an elevator system |
| US5387769A (en) * | 1993-06-01 | 1995-02-07 | Otis Elevator Company | Local area network between an elevator system building controller, group controller and car controller, using redundant communication links |
| US5561277A (en) * | 1994-03-15 | 1996-10-01 | Delaware Capital Formation, Inc. | Dual processor control system with continuous parallel interface integrity testing |
| US6173814B1 (en) * | 1999-03-04 | 2001-01-16 | Otis Elevator Company | Electronic safety system for elevators having a dual redundant safety bus |
| CA2458221C (en) * | 2001-09-03 | 2010-11-09 | Inventio Ag | Situation-dependent reaction in the case of a fault in the region of a door of a lift system |
| KR100953851B1 (ko) * | 2001-09-18 | 2010-04-20 | 인벤티오 아게 | 엘리베이터 도어용 안전 회로 |
| FR2841084B1 (fr) * | 2002-06-13 | 2004-12-17 | Systemig Sa | Dispositif de telereleve d'etats, et applications |
| WO2005000727A1 (de) * | 2003-06-30 | 2005-01-06 | Inventio Ag | Sicherheitssystem einer aufzugsanlage |
| CN100486881C (zh) * | 2003-11-19 | 2009-05-13 | 三菱电机株式会社 | 电梯控制装置 |
| FI117797B (fi) * | 2005-04-08 | 2007-02-28 | Kone Corp | Hissijärjestelmä |
| FI119508B (fi) * | 2007-04-03 | 2008-12-15 | Kone Corp | Vikaturvallinen tehonohjauslaitteisto |
| WO2009010410A1 (de) * | 2007-07-17 | 2009-01-22 | Inventio Ag | Überwachungsverfahren einer aufzugsanlage |
| KR101121826B1 (ko) * | 2008-04-15 | 2012-03-22 | 미쓰비시덴키 가부시키가이샤 | 엘리베이터 장치 |
-
2010
- 2010-02-24 US US13/203,320 patent/US8807284B2/en active Active
- 2010-02-24 DK DK10704944.7T patent/DK2401221T3/da active
- 2010-02-24 EP EP10704944.7A patent/EP2401221B1/de active Active
- 2010-02-24 ES ES10704944T patent/ES2432497T3/es active Active
- 2010-02-24 AU AU2010217638A patent/AU2010217638B2/en active Active
- 2010-02-24 WO PCT/EP2010/052332 patent/WO2010097404A1/de active Application Filing
- 2010-02-24 RU RU2011139086/11A patent/RU2524319C2/ru active
- 2010-02-24 SG SG2011061322A patent/SG173848A1/en unknown
- 2010-02-24 PL PL10704944T patent/PL2401221T3/pl unknown
- 2010-02-24 BR BRPI1008733-8A patent/BRPI1008733B1/pt active IP Right Grant
- 2010-02-24 CN CN201080009282.1A patent/CN102333717B/zh active Active
-
2012
- 2012-02-03 HK HK12101050.1A patent/HK1160437A1/xx unknown
Also Published As
| Publication number | Publication date |
|---|---|
| PL2401221T3 (pl) | 2014-01-31 |
| RU2011139086A (ru) | 2013-04-10 |
| AU2010217638B2 (en) | 2016-07-28 |
| US20110303492A1 (en) | 2011-12-15 |
| RU2524319C2 (ru) | 2014-07-27 |
| BRPI1008733A2 (pt) | 2016-06-28 |
| AU2010217638A1 (en) | 2011-09-29 |
| SG173848A1 (en) | 2011-09-29 |
| CN102333717B (zh) | 2014-03-12 |
| DK2401221T3 (da) | 2013-11-11 |
| EP2401221A1 (de) | 2012-01-04 |
| CN102333717A (zh) | 2012-01-25 |
| WO2010097404A1 (de) | 2010-09-02 |
| ES2432497T3 (es) | 2013-12-03 |
| EP2401221B1 (de) | 2013-07-31 |
| HK1160437A1 (en) | 2012-08-17 |
| US8807284B2 (en) | 2014-08-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BRPI1008733B1 (pt) | elevador com uma unidade de comando e processo de comunicação de um elevador com uma unidade de comando | |
| ES2783349T3 (es) | Dispositivo de supervisión para una instalación de transporte de personas, método de prueba e instalación de transporte de personas | |
| CN102393625B (zh) | 单通道安全输出 | |
| ES2805729T3 (es) | Sistema de transporte | |
| ES2563156T3 (es) | Dispositivo y procedimiento para vigilar las puertas de un hueco de ascensor | |
| CN104854013A (zh) | 用于人员运送设备的监控装置 | |
| WO2017098366A1 (en) | Seamless switchover system and method | |
| CN109674249A (zh) | 一种具有酒精检测功能的智能钥匙柜 | |
| CN102317875A (zh) | 控制引导车辆领域中的电开关系统的开关状态的调整的方法和设备 | |
| US8860556B2 (en) | Method and system for the secure detection of an RFID electronic tag | |
| CN105225446A (zh) | 电力开关柜智能防盗保护系统 | |
| US8456792B2 (en) | Secure non-contact switch | |
| CN204990448U (zh) | 一种多接口门禁控制器 | |
| CN107834524B (zh) | 一种基于脉冲信号监测的地铁直流保护装置 | |
| CN110309642A (zh) | 一种台式机电源开关安全身份认证系统及其身份认证方法 | |
| CN110166306A (zh) | 数据通信方法及系统 | |
| CN215495154U (zh) | 一种新型门禁控制器及门禁系统 | |
| CN204303059U (zh) | 门禁中心控制装置 | |
| CN209821915U (zh) | 门禁控制板 | |
| CN208654601U (zh) | 一种基于can通讯的智能锁具系统 | |
| CN117661961A (zh) | 智能门控制装置、智能门及智能门控制方法 | |
| JP7345986B2 (ja) | リモート入出力装置及び管理システム | |
| CN215526393U (zh) | 一种工业遥控器 | |
| CN201017359Y (zh) | 分体式门禁机 | |
| WO2017059462A2 (en) | Backup controller |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06F | Objections, documents and/or translations needed after an examination request according [chapter 6.6 patent gazette] | ||
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted |
Free format text: PRAZO DE VALIDADE: 10 (DEZ) ANOS CONTADOS A PARTIR DE 10/11/2020, OBSERVADAS AS CONDICOES LEGAIS. |