WO2023105676A1 - 電力変換装置、モータ駆動装置及び冷凍サイクル適用機器 - Google Patents
電力変換装置、モータ駆動装置及び冷凍サイクル適用機器 Download PDFInfo
- Publication number
- WO2023105676A1 WO2023105676A1 PCT/JP2021/045109 JP2021045109W WO2023105676A1 WO 2023105676 A1 WO2023105676 A1 WO 2023105676A1 JP 2021045109 W JP2021045109 W JP 2021045109W WO 2023105676 A1 WO2023105676 A1 WO 2023105676A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- frequency
- power supply
- capacitor
- current
- power
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/05—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation specially adapted for damping motor oscillations, e.g. for reducing hunting
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B31/00—Compressor arrangements
- F25B31/02—Compressor arrangements of motor-compressor units
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/22—Current control, e.g. using a current control loop
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters with pulse width modulation
- H02P27/12—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters with pulse width modulation pulsing by guiding the flux vector, current vector or voltage vector on a circle or a closed curve, e.g. for direct torque control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B13/00—Compression machines, plants or systems, with reversible cycle
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B2600/00—Control issues
- F25B2600/02—Compressor control
- F25B2600/021—Inverters therefor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B49/00—Arrangement or mounting of control or safety devices
- F25B49/02—Arrangement or mounting of control or safety devices for compression type machines, plants or systems
- F25B49/022—Compressor control arrangements
Definitions
- the present disclosure relates to a power conversion device, a motor drive device, and a refrigeration cycle application device that convert AC power into desired power.
- a power conversion device that converts AC power supplied from an AC power supply into desired AC power and supplies it to a load such as an air conditioner.
- a power converter which is a control device for an air conditioner, rectifies AC power supplied from an AC power supply with a diode stack, which is a rectifier, and smoothes the power with a smoothing capacitor
- a technology is disclosed in which an inverter comprising a plurality of switching elements converts the AC power into desired AC power and outputs the AC power to a compressor motor as a load.
- the present disclosure has been made in view of the above, and an object thereof is to obtain a power conversion device capable of suppressing an increase in device size while suppressing deterioration of a smoothing capacitor.
- the power converter according to the present disclosure includes a rectifier, a capacitor connected to the output terminal of the rectifier, an inverter connected to both ends of the capacitor, a first and a control unit.
- the rectifier rectifies a power supply voltage applied from an AC power supply.
- the inverter converts the DC power output from the capacitor into AC power, and outputs the AC power to the device on which the motor is mounted.
- the first detector detects a power supply voltage.
- the control unit performs pulsation compensation control for suppressing pulsation components of the capacitor current, which is the charge/discharge current of the capacitor, based on the detection value of the first detection unit.
- the power converter according to the present disclosure it is possible to suppress the deterioration of the smoothing capacitor and suppress the enlargement of the device.
- FIG. 1 is a diagram showing a configuration example of a power converter according to Embodiment 1;
- FIG. FIG. 2 is a block diagram showing a configuration example of a control unit included in the power converter according to Embodiment 1;
- FIG. 4 is a diagram showing a configuration example of a q-axis current pulsation calculation section included in the control section according to Embodiment 1;
- FIG. 4 is a diagram showing an example of the relationship between the smoothing section pulsating current and the power supply frequency in the power converter according to the first embodiment;
- 4 is a flowchart for explaining frequency setting processing performed inside the control unit according to the first embodiment;
- 1 is a block diagram showing an example of a hardware configuration realizing functions of a control unit according to Embodiment 1;
- FIG. 4 is a block diagram showing another example of a hardware configuration that implements the functions of the control unit according to Embodiment 1; The figure which shows the structural example of the power converter device which concerns on Embodiment 2.
- FIG. 4 is a block diagram showing a configuration example of a control unit included in a power converter according to Embodiment 2;
- FIG. 11 is a diagram showing a configuration example of a q-axis current pulsation calculation section included in a control section according to Embodiment 2;
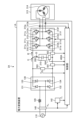
- FIG. 1 is a diagram showing a configuration example of a power conversion device 1 according to Embodiment 1.
- the power converter 1 is connected to a commercial power source 110 and a compressor 315 .
- the commercial power supply 110 is an example of an AC power supply
- the compressor 315 is an example of the equipment referred to in the first embodiment.
- a motor 314 is mounted on the compressor 315 .
- a motor drive device 2 is configured by the power conversion device 1 and the motor 314 included in the compressor 315 .
- the power conversion device 1 includes a voltage detection unit 140, a zero cross detection unit 142, a reactor 120, a rectification unit 130, current detection units 501 and 502, a voltage detection unit 503, a smoothing unit 200, an inverter 310, It includes current detection units 313 a and 313 b and a control unit 400 .
- Reactor 120 is connected between commercial power supply 110 and rectifying section 130 .
- the rectifying section 130 has a bridge circuit composed of rectifying elements 131-134.
- Rectifier 130 rectifies power supply voltage Vin applied from commercial power supply 110 and outputs the rectified power supply voltage.
- the rectifier 130 performs full-wave rectification.
- the smoothing section 200 is connected to the output terminal of the rectifying section 130 .
- Smoothing section 200 has capacitor 210 as a smoothing element, and smoothes the rectified voltage output from rectifying section 130 .
- the capacitor 210 is, for example, an electrolytic capacitor, a film capacitor, or the like. Capacitor 210 is connected to the output terminal of rectifying section 130 . Capacitor 210 has a capacity corresponding to the degree of smoothing the rectified voltage. Due to this smoothing, the voltage generated in the capacitor 210 does not have a full-wave rectified waveform of the rectified voltage, but has a waveform in which a voltage ripple corresponding to the frequency of the commercial power supply 110 is superimposed on the DC component, and does not pulsate greatly. When the commercial power source 110 is single-phase, the main component of the voltage ripple frequency is twice the frequency of the power supply voltage Vin .
- the amplitude of the voltage ripple is determined by the capacitance of capacitor 210 .
- the amplitude of the voltage ripple is, for example, the voltage of the capacitor 210 pulsating in a range such that the maximum value of the voltage ripple is less than twice the minimum value.
- the voltage detection section 140 detects the power supply voltage V in and outputs the detected value of the detected power supply voltage V in to the control section 400 and the zero cross detection section 142 .
- Zero-cross detection section 142 generates a zero-cross signal Z c corresponding to power supply voltage V in and outputs the generated zero-cross signal Z c to control section 400 .
- the zero-cross signal Zc is, for example, a signal that outputs a "High” level when the power supply voltage Vin is positive, and a signal that outputs a "Low” level when the power supply voltage Vin is negative. Note that these levels may be reversed.
- the detected value of the power supply voltage Vin and the zero-cross signal Zc are input to the controller 400 .
- Current detector 501 detects rectified current I ⁇ b>1 flowing out from rectifier 130 and outputs the detected value of rectified current I ⁇ b>1 to controller 400 .
- Current detection unit 502 detects inverter input current I ⁇ b>2 that flows into inverter 310 and outputs a detected value of inverter input current I ⁇ b>2 to control unit 400 .
- Voltage detection unit 503 detects capacitor voltage Vdc , which is the voltage of capacitor 210 , and outputs the detected value of the detected capacitor voltage Vdc to control unit 400 .
- Voltage detection unit 503 can be used as a detection unit that detects the power state of capacitor 210 .
- the inverter 310 is connected to both ends of the smoothing section 200 , that is, the capacitor 210 .
- the inverter 310 has switching elements 311a-311f and freewheeling diodes 312a-312f.
- the inverter 310 turns on and off the switching elements 311a to 311f under the control of the control unit 400, converts the DC power output from the rectifying unit 130 and the smoothing unit 200 into AC power having a desired amplitude and phase, and the motor 314 It outputs to the compressor 315 which is a mounted device.
- the current detection units 313 a and 313 b each detect the current value of one phase out of the three-phase motor currents output from the inverter 310 to the motor 314 .
- Each detection value of the current detection units 313 a and 313 b is input to the control unit 400 .
- the control unit 400 calculates the current of the remaining one phase based on the detected value of the current of any two phases detected by the current detection units 313a and 313b.
- a motor 314 mounted on the compressor 315 rotates according to the amplitude and phase of the AC power supplied from the inverter 310 to perform compression operation.
- the compressor 315 is a hermetic compressor used in an air conditioner or the like, the load torque of the compressor 315 can often be regarded as a constant torque load.
- FIG. 1 shows a case where the motor windings in the motor 314 are Y-connected
- the present invention is not limited to this example.
- the motor windings of the motor 314 may be delta-connection, or may be switchable between Y-connection and delta-connection.
- reactor 120 may be arranged after rectifying section 130 .
- the power conversion device 1 may include a booster section, or the rectifier section 130 may have the function of the booster section.
- the voltage detection unit 140 that detects the power supply voltage Vin is sometimes referred to as a "first detection unit”.
- At least one of the voltage detection unit 503 that detects the capacitor voltage Vdc , the current detection unit 501 that detects the rectified current I1, and the current detection unit 502 that detects the inverter input current I2 is referred to as the “second is sometimes referred to as the "detector of
- the control unit 400 acquires the detected value of the power supply voltage V in detected by the voltage detection unit 140 and the zero-cross signal Zc generated by the zero-cross detection unit 142 . Further, the control unit 400 detects the value of the rectified current I1 detected by the current detection unit 501, the value of the inverter input current I2 detected by the current detection unit 502, and the capacitor voltage V detected by the voltage detection unit 503. Get the detected value of dc . The control unit 400 also acquires the detected values of the motor currents detected by the current detection units 313a and 313b. Control unit 400 controls the operation of inverter 310, specifically, the on/off of switching elements 311a to 311f included in inverter 310, using the detection values detected by the respective detection units.
- control unit 400 controls the operation of the inverter 310 so that AC power including pulsation corresponding to the pulsation of the power flowing from the rectifying unit 130 into the capacitor 210 of the smoothing unit 200 is output from the inverter 310 to the compressor 315. do.
- the pulsation according to the pulsation of the power flowing into the capacitor 210 of the smoothing section 200 is, for example, the pulsation that varies depending on the frequency of the pulsation of the power flowing into the capacitor 210 of the smoothing section 200 .
- control unit 400 suppresses capacitor current I3, which is the charge/discharge current of capacitor 210 .
- the control unit 400 performs control so that any one of the speed, voltage, and current of the motor 314 is in a desired state. Note that the control unit 400 does not have to use all the detection values acquired from each detection unit, and can perform control using some of the detection values.
- the control unit 400 controls the motor 314 without a position sensor.
- position sensorless control methods for the motor 314 There are two types of position sensorless control methods for the motor 314: primary magnetic flux constant control and sensorless vector control. Embodiment 1 will be described based on sensorless vector control as an example. It should be noted that the control method described below can be applied to the primary magnetic flux constant control with minor modifications.
- the rectified current I1 flowing out of the rectifier 130 is affected by the power phase of the commercial power supply 110, the characteristics of elements installed before and after the rectifier 130, and the like.
- the rectified current I1 has characteristics including the power supply frequency and harmonic components of the power supply frequency.
- the power supply frequency is the frequency of the power supply voltage Vin .
- the harmonic component of the power supply frequency is dominant twice the power supply frequency.
- the harmonic component of the power supply frequency becomes dominant six times.
- the control unit 400 controls the inverter 310 so that the inverter input current I2 becomes equal to the rectified current I1, and controls the capacitor current I3 to approach zero. This suppresses deterioration of the capacitor 210 .
- a ripple component caused by PWM Pulse Width Modulation
- control unit 400 needs to control inverter 310 with the ripple component taken into consideration.
- Control unit 400 controls inverter 310 so that a value obtained by removing PWM ripple from inverter input current I2 from capacitor 210 to inverter 310 matches rectified current I1, and adds pulsation to the power output to motor 314 .
- Control unit 400 appropriately pulsates inverter input current I2 to perform pulsation compensation control to reduce pulsation of capacitor current I3.
- control unit 400 performs pulsation compensation control on capacitor 210 .
- Ripple compensation control is compensation control performed to suppress a pulsating component contained in capacitor current I3.
- Ripple compensation control is based on at least one detected value of rectified current I1, inverter input current I2, capacitor current I3, power supply voltage Vin , and capacitor voltage Vdc , which is information for grasping the power state of capacitor 210. can be implemented based on Due to the pulsation compensation control, the motor 314 is supplied with a current containing a pulsation component that is twice the power supply frequency (when the commercial power supply 110 is single-phase) or six times (when the commercial power supply 110 is three-phase). That is, due to the pulsation compensation control, a current containing a pulsation component with a frequency obtained by multiplying the power supply frequency by a specific integer flows through the motor 314 .
- FIG. 2 is a block diagram showing a configuration example of the control unit 400 included in the power converter 1 according to Embodiment 1.
- the control unit 400 includes a rotor position estimation unit 401, a speed control unit 402, a flux-weakening control unit 403, a current control unit 404, coordinate conversion units 405 and 406, a PWM signal generation unit 407, a q-axis current A pulsation calculator 408 , an adder 409 , and a frequency and phase calculator 410 are provided.
- the rotor position estimation unit 401 calculates the dq-axis Estimate an estimated phase angle ⁇ est , which is the direction at , and an estimated speed ⁇ est , which is the rotor speed.
- the speed control unit 402 automatically adjusts the q-axis current command i q1 * so that the speed command ⁇ * and the estimated speed ⁇ est match.
- the speed command ⁇ * is, for example, a temperature detected by a temperature sensor (not shown) or a setting indicated by a remote control that is an operation unit (not shown). It is based on information indicating temperature, operation mode selection information, operation start and operation end instruction information, and the like.
- the operation modes are, for example, heating, cooling, and dehumidification.
- the flux-weakening control unit 403 automatically adjusts the d-axis current command i d * so that the absolute value of the dq-axis voltage command vector V dq * falls within the limits of the voltage limit value V lim * . Further, in Embodiment 1, the flux-weakening control unit 403 performs flux-weakening control in consideration of the q-axis current ripple command i qrip * calculated by the q-axis current ripple calculation unit 408 .
- the flux-weakening control can be broadly divided into a method of calculating the d-axis current command id * from the equation of the voltage limit ellipse, and a method in which the absolute value deviation between the voltage limit value Vlim * and the dq-axis voltage command vector Vdq * is zero. There are two methods of calculating the d-axis current command i d * so that
- Frequency and phase calculator 410 calculates power supply frequency f in and power supply phase ⁇ in based on the detected value of power supply voltage V in detected by voltage detector 140 and zero-cross signal Z c generated by zero-cross detector 142 . to calculate The power supply frequency f in is the frequency of the power supply voltage Vin , and the power supply phase ⁇ in is the phase of the power supply voltage Vin .
- the power frequency f in and the power phase ⁇ in calculated by the frequency and phase calculator 410 may be referred to as the “detected value of the power frequency f in ” and the “detected value of the power phase ⁇ in ”, respectively. be.
- the current control unit 404 converts the dq-axis current vector idq into the d-axis current command id * and the q-axis current command iq based on the power supply frequency f in and the power supply phase ⁇ in calculated by the frequency and phase calculation unit 410 .
- the dq-axis voltage command vector V dq * is automatically adjusted so as to follow * .
- the coordinate conversion unit 405 coordinates-converts the dq-axis voltage command vector V dq * from the dq coordinates into the voltage command V uvw * of the AC quantity according to the estimated phase angle ⁇ est .
- a coordinate transformation unit 406 coordinates-transforms the current I uvw flowing through the motor 314 from an alternating current quantity to a dq-axis current vector i dq of dq coordinates in accordance with the estimated phase angle ⁇ est .
- the control unit 400 controls the two-phase current values detected by the current detection units 313a and 313b among the three-phase current values output from the inverter 310 for the current Iuvw flowing through the motor 314, It can be obtained by calculating the current value of the remaining one phase using the current values of the two phases.
- PWM signal generation unit 407 generates a PWM signal based on voltage command V uvw * coordinate-transformed by coordinate transformation unit 405 .
- Control unit 400 applies a voltage to motor 314 by outputting the PWM signal generated by PWM signal generation unit 407 to switching elements 311 a to 311 f of inverter 310 .
- a q-axis current ripple calculation unit 408 calculates the power supply frequency f in and the power supply phase ⁇ in calculated by the frequency and phase calculation unit 410, the detected value of the capacitor voltage V dc detected by the voltage detection unit 503, and the estimated speed ⁇ est q-axis current pulsation command i qrip * is calculated based on.
- An addition unit 409 adds the q-axis current command i q1 * output from the speed control unit 402 and the q-axis current ripple command i qrip * calculated by the q-axis current ripple calculation unit 408, and the calculated value is A certain q-axis current command i q * is output as a torque current command to the current control unit 404 .
- FIG. 3 is a diagram showing a configuration example of the q-axis current ripple calculator 408 included in the controller 400 according to the first embodiment.
- the q-axis current pulsation calculator 408 is configured as a feedback controller with a command value of zero. Generally, feedback controllers have a lower control response than feedforward controllers and are unsuitable for suppressing high-frequency pulsations, but various high-frequency pulsation suppression means have been proposed in the past. Famous methods include a method using Fourier coefficient calculation and a PID (Proportional Integral Differential) controller.
- the q-axis current pulsation calculator 408 includes a subtractor 383 , Fourier coefficient calculators 384 to 387 , PID controllers 388 to 391 , and an AC restorer 392 .
- the subtractor 383 calculates the deviation between the zero command value and the capacitor voltage Vdc .
- Fourier coefficient calculators 384 to 387 assume that the power supply frequency is the 1f component, and calculate the amplitudes of the sin2f component, cos2f component, sin4f component, and cos4f component included in the deviation.
- the detected signals multiplied by the Fourier coefficient calculators 384 to 387 are sin2(2 ⁇ f in t+ ⁇ in ), cos2(2 ⁇ f int + ⁇ in ), sin4(2 ⁇ f int + ⁇ in ), using time t and power supply frequency f in , respectively. and cos4(2 ⁇ f in t+ ⁇ in ).
- the detected signal has amplitudes of sin2f component, cos2f component, sin4f component, and cos4f component whose deviation includes twice the average value of the product of the input signal and the detected signal.
- the Fourier coefficient calculators 384 to 387 calculate the amplitude of the component corresponding to the power supply frequency f in of the commercial power supply 110 included in the deviation between the detected value and the command value. If the capacitor current I3 has a periodic waveform, the output signals of the Fourier coefficient calculators 384 to 387 are substantially constant.
- the PID control units 388 to 391 perform proportional-integral-derivative control, that is, PID control, so that specific frequency components of these deviations are zero.
- the proportional gain and the derivative gain can be zero, but the value of the integral gain must be non-zero in order to converge the deviation to zero. Therefore, in the PID controllers 388 to 391, integral action is the main function. Since the output of the integral control normally changes gently, the outputs of the PID control units 388 to 391 can also be regarded as substantially constant.
- the capacitor voltage Vdc is obtained by dividing the electric charge accumulated in the capacitor current I3, that is, the integrated value of the capacitor current I3, by the capacitance of the capacitor 210.
- the detection signals multiplied by the Fourier coefficient calculators 384 to 387 are sin2(2 ⁇ f in t+ ⁇ in ), cos2(2 ⁇ f in t+ ⁇ in ), sin4(2 ⁇ f in t+ ⁇ in ), and cos4(2 ⁇ f in ), respectively, as described above. t+ ⁇ in ).
- the AC restoration unit 392 shifts the restoration signal by the phase difference ⁇ offset to restore the outputs of the PID control units 388 to 391 to AC components . + ⁇ offset ), sin4(2 ⁇ f int + ⁇ in + ⁇ offset ), and cos4(2 ⁇ f int + ⁇ in + ⁇ offset ) and then summed to determine the q-axis current ripple command i qrip * .
- the AC restoring unit 392 generates the q-axis current pulsation command i qrip * , which is a pulsation command for suppressing the capacitor current I3.
- the case where the sensorless vector control method is used is exemplified, but if some modifications are made to add pulsation to the speed command, voltage command, etc., it can also be applied to the primary magnetic flux constant control.
- FIG. 4 is a diagram showing an example of the relationship between the smoothing section pulsating current and the power supply frequency f in in the power converter 1 according to the first embodiment.
- the smoothing section pulsating current shown on the vertical axis is the effective value or average value of the pulsating component contained in the capacitor current I3, which is the current flowing through the smoothing section 200 .
- the horizontal axis of FIG. 4 represents the power supply frequency f in .
- the plots connected by solid lines represent the smooth section pulsating current when the pulsation compensation control function of the q-axis current pulsation calculator 408 is not activated, and the plots connected by broken lines represent q It represents the smoothing section pulsating current when the pulsation compensation control function of the shaft current pulsation calculating section 408 is activated.
- the characteristic shown in FIG. 4 is that, inside the control unit 400, the pulsation compensation control process is performed on the premise that the frequency of the commercial power supply 110 does not change, that is, the frequency used in the pulsation compensation control is constant fA . is assumed.
- the control unit 400 in an environment where the power supply frequency f in fluctuates greatly, it is effective to match the frequency f A used in the pulsation compensation control to the actual power supply frequency f in . Therefore, in the control unit 400 according to Embodiment 1, the power supply frequency f in and the power supply phase ⁇ in are calculated by the frequency and phase calculation unit 410, and the calculated power supply frequency f in and the power supply phase ⁇ in are calculated on the q-axis. It is configured to be input to the current pulsation calculator 408 .
- FIG. 5 is a flowchart for explaining the frequency setting process performed inside the control unit 400 according to the first embodiment.
- the control unit 400 determines whether the current status is startup (step S11). If the control unit 400 is starting up (step S11, Yes), the control unit 400 determines the frequency of the commercial power supply 110 (step S12), and sets the determined frequency as the set frequency (step S13). For example, if the place of use of the power conversion device 1 is Japan, it is determined whether the frequency of the commercial power supply 110 is 50 [Hz] or 60 [Hz], and 50 [Hz] or 60 [Hz] is the initial value of the set frequency. Note that the above-described pulsation compensation control is performed based on this set frequency.
- step S11 if the current status is not startup (step S11, No), the control unit 400 checks the detected value of the power supply frequency f in (step S14), and further checks the detected value of the power supply frequency f in . and the set frequency is compared with a threshold value B (step S15).
- step S15 If the absolute value of the difference between the detected value of the power supply frequency f in and the set frequency exceeds the threshold value B (step S15, Yes), the set frequency is changed (step S16). In the process of step S16, the detected value of the power supply frequency f in confirmed in step S14 is used as a new set frequency. On the other hand, if the absolute value of the difference between the detected value of the power supply frequency f in and the set frequency does not exceed the threshold value B (step S15, No), the current set frequency is maintained (step S17).
- an appropriate power supply frequency f in can be set according to the environmental conditions of the power converter 1 . This makes it possible to enhance the effect of the pulsation compensation control in the power converter 1 .
- the set frequency is changed by comparing the detected value of the power supply frequency f in with the set frequency, but the processing is not limited to this. Instead of the set frequency, the set frequency may be changed by comparing the past detected value of the power supply frequency f in .
- the past detection value may be an average value of a plurality of detection values obtained in the past, or may be a detection value obtained through filtering such as a low-pass filter.
- the power converter 1 operates under the control by the control unit 400 described above, and the features of the operation are as follows.
- the power conversion device 1 calculates the absolute value of the difference between the frequency of the dominant pulsating component contained in the capacitor voltage Vdc or the capacitor current I3 and the frequency obtained by multiplying the detected value of the power supply frequency f in by a specific integer. It operates so that a certain first difference frequency is within 1 [Hz]. By operating in this way, the effect of the pulsation compensation control in the power converter 1 can be enhanced.
- the threshold value B used in step S15 of FIG. 5 should be appropriately set. As can be understood from the characteristics shown in FIG.
- the threshold B is a value smaller than 1 [Hz].
- the first difference frequency is the absolute value of the difference between the detected value of the power supply frequency f in and the frequency obtained by multiplying a specific integer, and the specific integer is 2 or 6, for example. , 0.5 [Hz].
- the threshold value B should be changed depending on whether the commercial power supply 110 is single-phase or three-phase.
- the power conversion device 1 is configured so that the second difference frequency, which is the absolute value of the difference between the frequency of the dominant pulsating component contained in the motor current flowing through the motor 314 and the set frequency, is within 1 [Hz]. works. By operating in this way, the effect of the pulsation compensation control in the power converter 1 can be enhanced.
- the threshold value B used in step S15 of FIG. 5 should be appropriately set. Points to consider when appropriately setting the threshold B are as described above.
- the power converter 1 When the function of pulsation compensation control in Embodiment 1 is working effectively, the power converter 1 operates so that the first or second differential frequency changes depending on the operating conditions of the equipment. become. If the example of the device is a compressor, the target values for the suction pressure, discharge pressure, refrigerant temperature, indoor temperature of the air conditioner, etc. of the compressor 315 correspond to the operating conditions referred to here. By confirming the change in the first or second difference frequency when at least one of these operating conditions is changed, it is possible to determine whether the function of the pulsation compensation control in the power converter 1 is normal. can be judged.
- FIG. 6 is a block diagram showing an example of a hardware configuration that implements the functions of the control unit 400 according to the first embodiment.
- FIG. 7 is a block diagram showing another example of the hardware configuration that implements the functions of the control unit 400 according to the first embodiment.
- the configuration may include an interface 424 .
- the processor 420 is an example of computing means.
- the processor 420 may be a computing means called a microprocessor, microcomputer, CPU (Central Processing Unit), or DSP (Digital Signal Processor).
- the memory 422 includes nonvolatile or volatile semiconductor memories such as RAM (Random Access Memory), ROM (Read Only Memory), flash memory, EPROM (Erasable Programmable ROM), EEPROM (registered trademark) (Electrically EPROM), Magnetic discs, flexible discs, optical discs, compact discs, mini discs, and DVDs (Digital Versatile Discs) can be exemplified.
- the memory 422 stores programs for executing the functions of the control unit 400 .
- the processor 420 can perform the above-described processing by exchanging necessary information via the interface 424 and executing the program stored in the memory 422 by the processor 420 . Results of operations by processor 420 may be stored in memory 422 .
- the processor 420 and memory 422 shown in FIG. 6 may be replaced with a processing circuit 423 as shown in FIG.
- the processing circuit 423 corresponds to a single circuit, a composite circuit, an ASIC (Application Specific Integrated Circuit), an FPGA (Field-Programmable Gate Array), or a combination thereof.
- Information to be input to the processing circuit 423 and information to be output from the processing circuit 423 can be obtained via the interface 424 .
- part of the processing in the control unit 400 may be performed by the processing circuit 423 and the processing not performed by the processing circuit 423 may be performed by the processor 420 and the memory 422 .
- the power converter according to Embodiment 1 performs pulsation compensation control to suppress the pulsation component of the capacitor current, which is the charge/discharge current of the capacitor, based on the detected value of the power supply voltage.
- the ripple change in the capacitor voltage can be reduced, so deterioration of the capacitor can be suppressed.
- the ripple change of the capacitor voltage can be reduced without increasing the capacitance of the capacitor, it is possible to suppress the deterioration of the capacitor and to suppress the enlargement of the device.
- the power converter according to Embodiment 1 calculates the power supply frequency based on the detected value of the power supply voltage and uses it as the detected value of the power supply frequency, and based on the set frequency set based on this detected value pulsation compensation control. That is, the power converter according to Embodiment 1 is configured so that the frequency used in the pulsation compensation control can be changed, so even in an environment where the power supply frequency fluctuates greatly, the effect of reducing the pulsating current in the smoothing section can be achieved. It can be held high.
- the frequency used in the pulsation compensation control can be changed, even if the type of commercial power supply is different, the design change of the control unit can be kept to a necessary minimum. This makes it possible to suppress an increase in manufacturing costs.
- FIG. 8 is a diagram showing a configuration example of a power conversion device 1A according to Embodiment 2.
- the controller 400 is replaced with a controller 400A.
- 2 A of motor drive apparatuses are comprised by 1 A of power converters, and the motor 314 with which the compressor 315 is provided.
- a current detection unit 504 that detects the capacitor current I3 is added to the power converter 1A.
- the detected value of capacitor current I3 detected by current detection unit 504 is input to control unit 400A.
- Other configurations are the same as or equivalent to those of the power conversion device 1 shown in FIG. 1, and the same or equivalent components are denoted by the same reference numerals, and overlapping descriptions are omitted.
- the current detection unit 504 that detects the capacitor current I3 is replaced with the voltage detection unit 503 that detects the capacitor voltage Vdc , the current detection unit 501 that detects the rectified current I1, and the current detection unit that detects the inverter input current I2. Together with the unit 502, it may be called a “second detection unit”.
- FIG. 9 is a block diagram showing a configuration example of a control section 400A included in the power converter 1A according to Embodiment 2. As shown in FIG. In a control unit 400A shown in FIG. 9, the q-axis current ripple calculation unit 408 is replaced with a q-axis current ripple calculation unit 408A as compared with the control unit 400 shown in FIG. The detected value of the capacitor current I3 is input to the q-axis current pulsation calculator 408A.
- Other configurations are the same as or equivalent to those of the control unit 400 shown in FIG. 2, and the same or equivalent components are denoted by the same reference numerals, and redundant description is omitted.
- FIG. 10 is a diagram showing a configuration example of a q-axis current pulsation calculation section 408A included in the control section 400A according to the second embodiment.
- the AC restoration section 392 is replaced with an AC restoration section 392A as compared with the q-axis current ripple calculation section 408 shown in FIG.
- the detection value of the capacitor current I3 is input to the subtraction unit 383 .
- the phase difference ⁇ offset that was used as the input signal to the AC restoration section 392 is deleted.
- Other configurations are the same as or equivalent to the q-axis current pulsation calculation unit 408 shown in FIG.
- the subtraction unit 383 calculates the deviation between the zero command value and the detected value of the capacitor current I3.
- Fourier coefficient calculators 384 to 387 calculate the amplitude of the component corresponding to power supply frequency f in of commercial power supply 110 included in the deviation between the detected value and the command value, as in the first embodiment.
- PID controllers 388-391 perform PID control so that specific frequency components of these deviations become zero.
- the AC restorer 392A restores the outputs of the PID controllers 388 to 391 to AC components by sin2(2 ⁇ f int + ⁇ in ), cos2( 2 ⁇ f int+ ⁇ in ), sin4(2 ⁇ f int + ⁇ in ), and cos4 After multiplying by (2 ⁇ f in t+ ⁇ in ), addition is performed to determine the q-axis current ripple command i qrip * .
- the AC restoring unit 392A generates the q-axis current pulsation command i qrip * , which is a pulsation command for suppressing the capacitor current I3.
- Other operations are the same as those in the first embodiment, and overlapping descriptions are omitted.
- the detected value of the capacitor current I3 is used to calculate the q-axis current ripple command i qrip * .
- the processing can be simpler than the processing of the current ripple calculation unit 408 . Therefore, the calculation load on the processor 420 or the processing circuit 423 can be reduced. As a result, the effect of facilitating task design in the processor 420 or the processing circuit 423 can be obtained while enjoying the effects of the first embodiment.
- Capacitor current I3 may be calculated from the value of rectified current I1 detected by current detection section 501 and the value of inverter input current I2 detected by current detection section 502 . Even in this way, the effects of the above-described second embodiment can be obtained.
- FIG. 11 is a diagram showing a configuration example of a refrigeration cycle equipment 900 according to Embodiment 3.
- a refrigerating cycle applied equipment 900 according to the third embodiment includes the power converter 1 described in the first embodiment.
- the refrigerating cycle applied equipment 900 according to Embodiment 3 can be applied to products equipped with a refrigerating cycle, such as air conditioners, refrigerators, freezers, and heat pump water heaters.
- constituent elements having functions similar to those of the first embodiment are assigned the same reference numerals as those of the first embodiment.
- Refrigerating cycle applied equipment 900 includes compressor 315 incorporating motor 314 according to Embodiment 1, four-way valve 902, indoor heat exchanger 906, expansion valve 908, and outdoor heat exchanger 910 with refrigerant pipe 912. attached through
- a compression mechanism 904 that compresses the refrigerant and a motor 314 that operates the compression mechanism 904 are provided inside the compressor 315 .
- the refrigeration cycle applied equipment 900 can perform heating operation or cooling operation by switching operation of the four-way valve 902 .
- the compression mechanism 904 is driven by a variable speed controlled motor 314 .
- the refrigerant is pressurized by the compression mechanism 904 and sent out through the four-way valve 902, the indoor heat exchanger 906, the expansion valve 908, the outdoor heat exchanger 910, and the four-way valve 902. Return to compression mechanism 904 .
- the refrigerant is pressurized by the compression mechanism 904 and sent through the four-way valve 902, the outdoor heat exchanger 910, the expansion valve 908, the indoor heat exchanger 906, and the four-way valve 902. Return to compression mechanism 904 .
- the indoor heat exchanger 906 acts as a condenser to release heat, and the outdoor heat exchanger 910 acts as an evaporator to absorb heat.
- the outdoor heat exchanger 910 acts as a condenser to release heat, and the indoor heat exchanger 906 acts as an evaporator to absorb heat.
- the expansion valve 908 reduces the pressure of the refrigerant to expand it.
- the refrigerating cycle applied equipment 900 according to Embodiment 3 has been described as including the power converter 1 described in Embodiment 1, it is not limited to this.
- the power conversion device 1A described in the second embodiment may be used, or a power conversion device other than the power conversion devices 1 and 1A may be used as long as the control method described in the first and second embodiments can be applied. .
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Thermal Sciences (AREA)
- General Engineering & Computer Science (AREA)
- Control Of Ac Motors In General (AREA)
- Inverter Devices (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202180104625.0A CN118339757A (zh) | 2021-12-08 | 2021-12-08 | 电力转换装置、马达驱动装置以及制冷循环应用设备 |
| JP2023565773A JPWO2023105676A1 (https=) | 2021-12-08 | 2021-12-08 | |
| US18/705,046 US20250219560A1 (en) | 2021-12-08 | 2021-12-08 | Power conversion apparatus, motor drive apparatus, and refrigeration cycle application device |
| PCT/JP2021/045109 WO2023105676A1 (ja) | 2021-12-08 | 2021-12-08 | 電力変換装置、モータ駆動装置及び冷凍サイクル適用機器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/045109 WO2023105676A1 (ja) | 2021-12-08 | 2021-12-08 | 電力変換装置、モータ駆動装置及び冷凍サイクル適用機器 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023105676A1 true WO2023105676A1 (ja) | 2023-06-15 |
Family
ID=86729941
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/045109 Ceased WO2023105676A1 (ja) | 2021-12-08 | 2021-12-08 | 電力変換装置、モータ駆動装置及び冷凍サイクル適用機器 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20250219560A1 (https=) |
| JP (1) | JPWO2023105676A1 (https=) |
| CN (1) | CN118339757A (https=) |
| WO (1) | WO2023105676A1 (https=) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005020836A (ja) * | 2003-06-24 | 2005-01-20 | Takahashi Yuko | 多相電流供給回路及び駆動装置 |
| WO2007108185A1 (ja) * | 2006-03-15 | 2007-09-27 | Mitsubishi Electric Corporation | 電動機駆動装置及び圧縮機駆動装置 |
| JP2009232591A (ja) * | 2008-03-24 | 2009-10-08 | Mitsubishi Electric Corp | 電動機駆動装置および空気調和機 |
| JP2021158874A (ja) * | 2020-03-30 | 2021-10-07 | パナソニックIpマネジメント株式会社 | モータインバータ制御装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7623922B2 (ja) * | 2021-09-30 | 2025-01-29 | 日立Astemo株式会社 | インバータ制御装置、ハイブリッドシステム、機電一体ユニット、電動車両システム、インバータ制御方法 |
| CN115940671A (zh) * | 2021-10-04 | 2023-04-07 | 丹佛斯电力电子有限公司 | 用于抑制在asd上的供电电压中的偶次谐波的效应的开关控制方法 |
-
2021
- 2021-12-08 JP JP2023565773A patent/JPWO2023105676A1/ja not_active Withdrawn
- 2021-12-08 US US18/705,046 patent/US20250219560A1/en active Pending
- 2021-12-08 WO PCT/JP2021/045109 patent/WO2023105676A1/ja not_active Ceased
- 2021-12-08 CN CN202180104625.0A patent/CN118339757A/zh active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005020836A (ja) * | 2003-06-24 | 2005-01-20 | Takahashi Yuko | 多相電流供給回路及び駆動装置 |
| WO2007108185A1 (ja) * | 2006-03-15 | 2007-09-27 | Mitsubishi Electric Corporation | 電動機駆動装置及び圧縮機駆動装置 |
| JP2009232591A (ja) * | 2008-03-24 | 2009-10-08 | Mitsubishi Electric Corp | 電動機駆動装置および空気調和機 |
| JP2021158874A (ja) * | 2020-03-30 | 2021-10-07 | パナソニックIpマネジメント株式会社 | モータインバータ制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023105676A1 (https=) | 2023-06-15 |
| CN118339757A (zh) | 2024-07-12 |
| US20250219560A1 (en) | 2025-07-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5047021B2 (ja) | 電動機駆動装置および空気調和機 | |
| JP7345674B2 (ja) | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 | |
| JP7466794B2 (ja) | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 | |
| WO2023084600A1 (ja) | 電力変換装置、モータ駆動装置及び冷凍サイクル適用機器 | |
| JP7387038B2 (ja) | 電力変換装置、モータ駆動装置および空気調和機 | |
| JP7345673B2 (ja) | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 | |
| JP7566175B2 (ja) | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 | |
| WO2023073870A1 (ja) | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 | |
| WO2022172417A1 (ja) | 電力変換装置、モータ駆動装置及び冷凍サイクル適用機器 | |
| WO2023105570A1 (ja) | 電力変換装置、モータ駆動装置及び冷凍サイクル適用機器 | |
| WO2023100359A1 (ja) | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 | |
| WO2023100360A1 (ja) | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 | |
| WO2022172418A1 (ja) | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 | |
| WO2022162720A1 (ja) | 制御装置、電力変換装置、モータ駆動装置及び冷凍サイクル適用機器 | |
| WO2023100321A1 (ja) | 電力変換装置、モータ駆動装置及び冷凍サイクル適用機器 | |
| JP7330401B2 (ja) | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 | |
| JP7566174B2 (ja) | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 | |
| JP7542751B2 (ja) | 電力変換装置、電動機駆動装置及び冷凍サイクル適用機器 | |
| WO2023105676A1 (ja) | 電力変換装置、モータ駆動装置及び冷凍サイクル適用機器 | |
| WO2023157045A1 (ja) | 電力変換装置および空気調和機 | |
| JP7825794B1 (ja) | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 | |
| JP7325671B2 (ja) | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 | |
| WO2023067774A1 (ja) | 電力変換装置、モータ駆動装置および冷凍サイクル適用機器 | |
| CN118696497A (zh) | 马达驱动装置以及制冷循环装置 | |
| JP7834200B2 (ja) | 電力変換装置、モータ駆動装置及び冷凍サイクル適用機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21967175 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023565773 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18705046 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202180104625.0 Country of ref document: CN |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21967175 Country of ref document: EP Kind code of ref document: A1 |
|
| WWP | Wipo information: published in national office |
Ref document number: 18705046 Country of ref document: US |