WO2022130980A1 - 電子装置およびその製造方法 - Google Patents
電子装置およびその製造方法 Download PDFInfo
- Publication number
- WO2022130980A1 WO2022130980A1 PCT/JP2021/044082 JP2021044082W WO2022130980A1 WO 2022130980 A1 WO2022130980 A1 WO 2022130980A1 JP 2021044082 W JP2021044082 W JP 2021044082W WO 2022130980 A1 WO2022130980 A1 WO 2022130980A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- thinned
- portions
- flexible
- electronic device
- shape
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 5
- 238000004519 manufacturing process Methods 0.000 title claims description 4
- 239000004065 semiconductor Substances 0.000 title 1
- 238000005452 bending Methods 0.000 claims abstract description 31
- 239000000758 substrate Substances 0.000 claims abstract description 18
- 230000002093 peripheral effect Effects 0.000 claims description 8
- 238000003825 pressing Methods 0.000 claims description 2
- 238000003754 machining Methods 0.000 abstract description 3
- 239000004593 Epoxy Substances 0.000 abstract description 2
- 239000011521 glass Substances 0.000 abstract description 2
- 239000010410 layer Substances 0.000 description 37
- 239000002184 metal Substances 0.000 description 16
- 238000004891 communication Methods 0.000 description 15
- 239000011888 foil Substances 0.000 description 11
- 239000003990 capacitor Substances 0.000 description 7
- 239000000463 material Substances 0.000 description 6
- 230000015572 biosynthetic process Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 239000012790 adhesive layer Substances 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 239000002344 surface layer Substances 0.000 description 1
- -1 that is Substances 0.000 description 1
Images


















Classifications
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K1/00—Printed circuits
- H05K1/02—Details
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K3/00—Apparatus or processes for manufacturing printed circuits
Definitions
- the present invention relates to an electronic device using a bendable multilayer wiring board that can be accommodated in an exterior member in a bent state.
- Patent Document 1 as a circuit board to be incorporated in a motor unit of a power steering device, a plurality of rigid substrate portions are connected by a bent portion thinner and more flexible than the rigid substrate portion to form a substantially U shape.
- a circuit board that can be used in a folded form is disclosed.
- the bent part is formed by cutting a part of the plate thickness of the multi-layer wiring board by machining to make it thinner.
- a pair of thinly-walled bent portions are curved by approximately 90 ° between the pair of rigid substrate portions and the intermediate rigid substrate portion between the two.
- cracks are likely to occur in the bent portion.
- stress is concentrated on the boundary between the rigid substrate portion and the thinned bent portion, and cracks are likely to occur.
- a multilayer wiring board having a plurality of wiring layers is housed in an exterior member in a bent state.
- the wiring board includes at least two component mounting portions on which electronic components are mounted, and a flexible portion located between these component mounting portions and having relatively high flexibility.
- Multiple recessed groove-shaped thinned parts with a relatively thin substrate thickness, and multiple non-thinned parts with a substrate thickness of the same as the component mounting part or at least relatively thicker than the thinned part. Are arranged alternately.
- the bending angle in each portion formed by one thinned portion and two adjacent non-thinned portions sandwiching the thinned portion is smaller than the bending angle required for the flexible portion as a whole. Become. That is, the angle changes little by little in the plurality of thinned portions, and the bending angle required for the flexible portion is realized as a set of these individual small angle changes. Therefore, the occurrence of cracks in the flexible portion is suppressed.
- An exploded perspective view of an electric actuator device for a power steering device incorporating a circuit board according to the present invention Sectional drawing of the electric actuator device.
- An explanatory diagram showing (a) a flexible portion in a straight line state and (b) a flexible portion in a bent state in comparison with each other.
- FIG. 3 is a cross-sectional view of a main part showing a second embodiment in which the shape of the groove portion of the thinned portion is changed.
- FIG. 3 is a cross-sectional view of a main part showing a third embodiment in which the shape of the groove of the thinned part is changed.
- FIG. 3 is a cross-sectional view of a main part showing a fourth embodiment in which the shape of the groove of the thinned part is changed.
- FIG. 3 is a cross-sectional view of a main part showing a fifth embodiment in which the shape of the groove portion of the thinned portion is changed.
- FIG. 3 is a cross-sectional view of a main part showing a sixth embodiment in which the shape of the groove of the thinned part is changed.
- FIG. 3 is a cross-sectional view of a main part showing a seventh embodiment in which the shape of the groove portion of the thinned portion is changed. Explanatory drawing which shows an example of the flexible part in which a bending direction is different.
- FIG. 1 is an exploded perspective view of an electric actuator device that applies steering assist force to a steering mechanism (not shown) in an electric power steering device.
- FIG. 2 is a cross-sectional view of the electric actuator device.
- a cylindrical motor unit 1 an inverter power module 2, a circuit board 3 composed of a bendable multi-layer wiring board according to an embodiment of the present invention, and a plurality of connectors are integrally assembled.
- the connector member 4 is provided with a motor cover 5 attached to one end of the motor unit 1 so as to cover the inverter power module 2, the circuit board 3, and the connector member 4.
- a motor 1A (FIG. 2) corresponding to an electric actuator composed of a stator 1B and a rotor 1C is housed inside a cylindrical housing 7, and a rotating shaft 6 protruding from the tip surface of the housing 7 It has a connecting portion 6a such as a gear or a spline at the tip thereof, and is connected to a steering mechanism (not shown) via the connecting portion 6a.
- the motor 1A is a three-phase permanent magnet type brushless motor, the stator 1B includes a three-phase coil, and a permanent magnet is arranged on the outer peripheral surface of the rotor 1C.
- the motor 1A includes two coils and corresponding permanent magnets to provide redundancy.
- One end of the housing 7 opposite to the connecting portion 6a is configured as a bottom wall portion 7a having a horseshoe-shaped contour in which a part of the outer peripheral edge extends in the radial direction, and covers the bottom wall portion 7a.
- the motor cover 5 having a horseshoe-shaped contour corresponding to the bottom wall portion 7a is attached.
- the inverter power module 2, the circuit board 3, and the connector member 4 are housed in the space formed between the bottom wall portion 7a and the motor cover 5 so as to be overlapped with each other in the axial direction of the rotating shaft 6. That is, in this embodiment, the housing 7 and the motor cover 5 correspond to the exterior members in the claims.
- the inverter power module 2 includes two inverter modules 2A for driving the motor 1A and a relay module 2B as a neutral point relay of the coil, so that these three parties form a substantially U shape surrounding the rotating shaft 6. Is located in. Then, these inverter modules 2A and relay modules 2B are fixed to the end faces of the motor unit 1 via the holding member 2C.
- the connector member 4 includes three connectors pointing in the same direction along the axial direction of the rotating shaft 6. Specifically, the power supply connector 4a located in the center, the sensor input connector 4b to which signals from sensors (for example, steering angle sensor, torque sensor, etc.) arranged on the steering mechanism side are input, and other sensors in the vehicle. It is provided with a communication connector 4c for performing communication (for example, CAN communication) with a control device. These connectors 4a, 4b, 4c project to the outside through the opening 8 of the motor cover 5.
- FIG. 3 is a perspective view showing an outline of the circuit board 3 in a state of being bent into a substantially U shape
- FIG. 4 is a side view.
- the circuit board 3 is incorporated in an electric actuator device corresponding to an "electronic device” in a shape bent into a substantially U shape.
- the circuit board 3 is relatively relative to the first rigid portion 11 which is a power system board on which a group of electronic components in which a relatively large current flows for driving the motor 1A via the inverter power module 2 is mounted. It includes a second rigid portion 12 that serves as a control system board on which a control system electronic component through which a small current flows is mounted, and a flexible portion 13 between the two.
- the first rigid portion 11 and the second rigid portion 12 correspond to "component mounting portions", respectively.
- the circuit board 3 is an exterior member in a state in which the flexible portion 13 is bent and deformed so that the first rigid portion 11 and the second rigid portion 12 overlap each other in the axial direction of the rotating shaft 6. It is housed between the housing 7 and the motor cover 5.
- first rigid portion 11 and the second rigid portion 12 in the bent state are separated from each other by a distance such that the electronic components mounted on the respective parts do not come into contact with each other, and are in a plane state. It is fixedly supported by the electric actuator device in a state of being parallel to each other while maintaining the above.
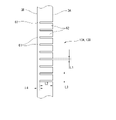
- FIG. 5 is a cross-sectional view showing the circuit board 3 in an unfolded state, that is, in a state before being bent (hatching of the board portion is omitted).
- the circuit board 3 composed of one multilayer wiring board includes a first surface 3A and a second surface 3B.
- FIG. 6 is a plan view showing the configuration of the first surface 3A in a state where the circuit board 3 is unfolded
- FIG. 7 is a plan view showing the configuration of the second surface 3B.
- the circuit board 3 has the first rigid portion 11, the second rigid portion 12, and the flexible portion 13 as one circuit board along one plane in the expanded state as shown in FIGS. 5 to 7. It is formed and is finally folded into a substantially U shape after mounting the components.
- the first rigid portion 11 and the second rigid portion 12 each have a shape similar to a quadrangle having mounting holes 15 at the four corners. Then, the central portion of one side of the first rigid portion 11 and the central portion of one side of the second rigid portion 12 adjacent to each other are connected to each other by a flexible portion 13 forming a band shape having a constant width. That is, the width of the flexible portion 13 is narrower than the width of the first rigid portion 11 and the second rigid portion 12 (dimensions in the direction orthogonal to the bending direction). Therefore, the circuit board 3 has an I-shape or an 8-shape as a whole. By making the widths of the first and second rigid portions 11 and 12 relatively wide and the width of the flexible portions 13 relatively narrow in this way, a large component mounting area can be secured, while the flexible portions 13 can be secured. It becomes easy to bend and deform in.
- the circuit board 3 is composed of a multi-layer printed wiring board, specifically, a so-called 6-layer printed wiring board provided with 6 wiring layers, that is, metal foil layers 51A to 51F (see FIG. 11).
- this multilayer printed wiring board several base materials made of, for example, glass epoxy having a metal foil layer on one side or both sides are laminated via a prepreg (adhesive layer), and are heated and pressed to be integrated. It is composed of. Therefore, the metal leaf layers 51A and 51F (see FIG. 11) on the surface layers of the first surface 3A and the second surface 3B, respectively, and the metal foil layers 51B to 51E (see FIG. 11) of the four inner layers form a wiring layer.
- a six-layer metal leaf layer is configured.
- a base material as an insulating layer that insulates between the metal foil layers is interposed between the metal foil layers. Then, in the first rigid portion 11 and the second rigid portion 12, a desired circuit pattern is formed by etching the metal foil layers of these six layers and forming vias extending in the stacking direction.
- the circuit board 3 of this embodiment includes two independent control systems corresponding to the two coils of the motor 1A.
- each control system is configured by arranging parts on the circuit board 3 along the L direction (see FIGS. 6 and 7), which is the longitudinal direction thereof, and the two control systems are basically. It is configured to be arranged side by side in the W direction, which is the width direction of the circuit board 3. Except for the difference in details, the two control systems are symmetrically configured with the substrate center line M as the center.
- one control system includes one filter unit 31 and one power supply capacitor unit 34.
- the filter portion 31 is composed of a coil 32 having a rectangular case and a capacitor 33 having the same rectangular case located closer to the flexible portion 13 than the coil 32.
- the power supply capacitor unit 34 is configured to include capacitors 34A, 34B, 34C having a plurality of, for example, three rectangular cases.
- a total of four power cutoff switching elements 35 are mounted in each control system between the capacitor 33 of the filter unit 31 and the flexible unit 13. Two power cutoff switching elements 35 of each control system are arranged adjacent to the capacitor 33.
- a second rotation sensor 38 for detecting the rotation of the motor 1A is mounted between the two filter units 31.
- the second rotation sensor 38 is an analog type rotation sensor that detects the rotation of the rotation shaft 6 in combination with a magnetic pole provided at the end of the rotation shaft 6 of the motor 1A, and is the center of the rotation shaft 6 at the time of assembly. It is located on the axis.
- the second rotation sensor 38 is shared by two control systems, is branched into two signal circuits on the first rigid unit 11, and is used in each control system.
- a first power supply terminal 40 is attached to each of the pair of side edge portions 11a of the first rigid portion 11.
- Each first power supply terminal 40 includes a positive electrode terminal 40A and a negative electrode terminal 40B, and a set of first power supply terminals 40 including a positive electrode terminal 40A and a negative electrode terminal 40B corresponds to one control system, respectively. There is.
- the positive electrode terminal 40A and the negative electrode terminal 40B are each made of a metal piece bent into a substantially L shape, and rise from the first surface 3A along the side edge of the first rigid portion 11 so as to be orthogonal to the first surface 3A. There is.
- the positive electrode terminal 40A and the negative electrode terminal 40B are arranged side by side along the L direction.
- the first power supply terminal 40 is connected to the terminal piece of the power supply connector 4a of the connector member 4 described above.
- the two sets of first power supply terminals 40 are configured symmetrically with respect to the substrate center line M.
- the first rigid unit 11 further includes a gate signal port 41 connected to a switching element of each arm of the inverter power module 2 and an inverter power supply port 42 for supplying a power supply voltage to the inverter power module 2.
- a gate signal port 41 connected to a switching element of each arm of the inverter power module 2
- an inverter power supply port 42 for supplying a power supply voltage to the inverter power module 2.
- the CPU 21 comprises an integrated circuit having a substantially square flat package.
- the pre-driver circuit element 22 is mounted at a position closer to the flexible portion 13 than the two CPUs 21.
- the pre-driver circuit element consists of an integrated circuit having a substantially square flat package smaller than the CPU 21.
- the pair of side edge portions 12a of the second rigid portion 12 are each formed with notches 24 for avoiding interference with the first power supply terminal 40 of the first rigid portion 11 described above in a bent state. Further, a second power supply terminal 25 composed of two positive and negative through holes is provided at a position along each notch 24. These two sets of second power supply terminals 25 correspond to their respective control systems. In the final assembled state as an electric actuator device, the pin-shaped terminal piece of the power connector 4a of the connector member 4 described above is inserted into the through-hole-shaped second power supply terminal 25 and electrically connected. ..
- An external sensor input unit 27 composed of a plurality of through-hole-shaped terminals is provided in the end region of the second rigid unit 12 near the flexible unit 13. A plurality of through-hole-shaped terminals are arranged side by side in a straight line along the W direction.
- a pin-shaped terminal piece of the sensor input connector 4b of the connector member 4 is inserted into the external sensor input unit 27, and a signal of an external sensor such as a steering angle sensor or a torque sensor is inserted. Is input to each control system via the external sensor input unit 27.
- a communication port 28 composed of a plurality of through-hole-shaped terminals is provided in the end region of the second rigid portion 12 opposite to the flexible portion 13.
- a plurality of through-hole-shaped terminals are arranged side by side in a straight line along the W direction.
- the pin-shaped terminal piece of the communication connector 4c of the connector member 4 is inserted into the communication port 28, and communication is performed with other external control devices. ..
- a first rotation sensor 37 for detecting the rotation of the motor 1A is mounted in the central portion.
- the first rotation sensor 37 is a digital rotation sensor that detects the rotation of the rotation shaft 6 in combination with a magnetic pole provided at the end of the rotation shaft 6 of the motor 1A, and is the center of the rotation shaft 6 at the time of assembly. It is located on the axis.
- the first rotation sensor 37 is shared by two control systems like the second rotation sensor 38, is branched into two signal circuits on the first rigid unit 11, and is used in each control system. Will be done.
- the first rotation sensor 37 arranged on the second surface 3B and the second rotation sensor 38 arranged on the first surface 3A are positioned so as to overlap each other when the circuit board 3 is projected and viewed.
- the first rotation sensor 37 is located on the outer surface of the circuit board 3 having a substantially U shape and faces the end surface of the rotation shaft 6.
- the second rotation sensor 38 is inside the circuit board 3 having a substantially U shape.
- the first rotation sensor 37 is the main rotation sensor
- the second rotation sensor 38 is, for example, a preliminary rotation sensor used when the first rotation sensor 37 is abnormal.
- two power supply / communication ICs 29 including an integrated circuit including a power supply circuit for the second rigid unit 12 and a communication circuit for the communication port 28 are mounted.
- the power / communication IC 29 has a substantially square flat package smaller than the CPU 21.
- the two power supply / communication IC 29s correspond to the two control systems, respectively.
- the power supply / communication IC 29 communicates with other external control devices via the communication port 28. Further, the power supply / communication IC 29 converts the terminal voltage input to the second power supply terminal 25 into the operating voltage for the second rigid unit 12.
- the flexible portion 13 is relative to the thickness (dimensions in the stacking direction) of the substrates of the first rigid portion 11 and the second rigid portion 12 having a six-layer structure.
- a plurality of concave groove-shaped thinning portions 61 formed thinly, and a plurality of narrow non-thinning portions 62 remaining at the same thickness as the first rigid portion 11 and the second rigid portion 12 are alternately arranged. By arranging in, it is configured to have higher flexibility than the first rigid portion 11 and the second rigid portion 12.
- the flexible portion is subjected to secondary machining.
- the four layers on the first surface 3A side, which are inside at the time of bending in No. 13, are scraped off and thinned to form a plurality of thinned portions 61.
- the circuit board 3 has 6 layers of metal leaf layers 51A to 51F, but in the thinned portion 61, the 4 layers of metal foil layers 51A to 51D are scraped off. Only the two metal leaf layers 51E and 51F remain.
- the thinned portion 61 is recessed in a concave groove shape on the first surface 3A of the circuit board 3.
- the flexible portion 13 has a surface continuous with the first and second rigid portions 11 and 12.
- the base material of the first and second rigid portions 11 and 12 and the base material of the flexible portion 13 are made of the same material, and the two layers on the second surface 3B side remaining in the thinned portion 61 of the flexible portion 13.
- the metal foil layers 51E and 51F are continuous over the first and second rigid portions 11 and 12 and the flexible portion 13 (see FIG. 11).
- the two remaining metal foil layers 51E and 51F in the flexible portion 13 constitute the necessary circuit wiring between the first rigid portion 11 and the second rigid portion 12.
- the intermediate rigid portion 14 is left as a 6-layer structure in the central portion of the flexible portion 13 in order to secure a printed surface such as a barcode. Therefore, the flexible portion 13 is divided into two as first and second flexible portions 13A and 13B located on both sides of the intermediate rigid portion 14 as a portion having actual flexibility.
- the first flexible portion 13A and the second flexible portion 13B are each bent by 90 °, and a bending angle of 180 ° is realized as a whole.
- the intermediate rigid portion 14 is not essential, and a series of continuous flexible portions 13 may realize a bending angle of 180 °.
- the entire space between the first rigid portion 11 and the second rigid portion 12, including the intermediate rigid portion 14, is referred to as a flexible portion 13.
- the intermediate rigid portion 14 of the embodiment has six metal foil layers 51A to 51F, but the metal foil layers 51A to 51D corresponding to the third to sixth layers when viewed from the second surface 3B side are wiring patterns. Not used for formation.
- the thinned portion 61 is formed in the shape of a concave groove having a rectangular cross section on the side of the first surface 3A of the circuit board 3. Due to the formation of the thinned portion 61, the non-thinned portion 62 remains between the two adjacent thinned portions 61.
- the plurality of thinned portions 61 and the non-thinned portions 62 extend in parallel along the width direction (W direction) of the circuit board 3 shown in FIGS. 6 and 7. In other words, a plurality of thinning portions 61 are formed in a direction orthogonal to the longitudinal direction (L direction) of the circuit board 3, so that the first rigid portion 11 and the second rigid portion 12 overlap each other. It is possible to fold it into.
- the individual thinned portion 61 and the non-thinned portion 62 are linear in the plan view shown in FIGS. 6 and 7, and the individual thinned portion 61 and the non-thinned portion 62 each have a constant width. It extends in the W direction of FIGS. 6 and 7.
- the first flexible portion 13A and the second flexible portion 13B include nine thinning portions 61 and eight non-thinning portions 62, respectively.
- the present invention is not limited to such a specific number, and an appropriate number of thinned portions 61 and non-thinned portions are determined according to the material and thickness of the circuit board 3, the required bending angle, and the like.
- the conversion part 62 can be provided.
- the first flexible portion 13A and the second flexible portion 13B have substantially the same configuration, but they may have different configurations.
- FIG. 9A shows the state before bending (that is, the linear state) of the first and second flexible portions 13A and 13B
- FIG. 9B shows the bending state.
- the first and second flexible portions 13A and 13B are bent by, for example, 90 ° as a whole, one thinning portion 61 and two non-thinning portions 62 adjacent to the thinned portion 61 are interposed therebetween.
- a relatively small bending angle is formed. That is, the angle changes little by little in the plurality of thinning portions 61, and the bending angle (for example, 90 °) required for the first and second flexible portions 13A and 13B is realized as a set of these individual small angle changes. Therefore, the stress at the boundary between each thinned portion 61 and the non-thinned portion 62 becomes small, and the generation of cracks is suppressed.
- the two non-thinning portions 62 adjacent to each other with one thinning portion 61 in between tilt and approach each other as shown in FIG. 9B as the flexible portions 13A and 13B are bent.
- two non-thinning portions 62 adjacent to each other across the thinning portion 61 do not interfere with each other in the reference bent state, while in a predetermined over-bent state beyond the reference bent state.
- the dimensions (width and depth of the concave groove) of the thinned portion 61 are set so as to interfere with each other.
- the "predetermined excessive bending state” is set in a range in which cracks do not occur in the thinned portion 61.
- the bending angle of some of the thinned portions 61 becomes relatively large.
- the interference between the two adjacent non-thinning portions 62 limits the bending angle of the thinning portion 61 to a predetermined excessive bending state, and the thinning portion 61 is not bent any more. Therefore, the occurrence of cracks is more reliably suppressed.
- the dimension L1 is defined as the width of the thinned portion 61
- L2 is defined as the depth of the thinned portion 61
- L3 is defined as the width of the non-thinned portion 62
- L4 is defined as the substrate thickness in the thinned portion 61.
- the width L1 of the thinned portion 61 is smaller than the depth L2 of the thinned portion 61.
- the bending angle that is, the unit bending angle
- the width L3 of the non-thinned portion 62 is smaller than the depth L2 of the thinned portion 61. That is, the non-thinning portion 62 is divided into a relatively small width L3.
- the substrate thickness L4 in the thinned portion 61 is smaller than the depth L2 in the thinned portion 61. This gives good flexibility.
- the width L1 of each thinning portion 61 is the same for each of the plurality of thinning portions 61. Further, for the plurality of non-thinning portions 62, the width L3 of each non-thinning portion 62 is the same as each other. As a result, a bent state along a constant radius of curvature can be obtained for the first and second flexible portions 13A and 13B as a whole.
- the present invention is not limited to this, and the width L1 of the thinned portion 61 and the width L3 of the non-thinned portion 62 can be made non-uniform so as to follow a desired bent shape.
- the width L1 of the thinned portions 61 is constant and the width L3 of the non-thinned portions 62 is appropriately changed.
- FIG. 12 is an explanatory diagram showing a bending process of finally bending a flat circuit board 3 having a plurality of thinned portions 61 formed into a substantially U shape.
- the bending process of the circuit board 3 is performed by using a jig 71 formed by combining the inner jig 72 and the outer jig 73.
- the inner jig 72 is a flat surface connected to a pair of curved surfaces 72a and 72b corresponding to the desired curved shapes of the first and second flexible portions 13A and 13B, and one end of the curved surface 72a and one end of the curved surface 72b. It has a surface 72c and.
- the outer jig 73 has a flat surface 73a facing the flat surface 72c.
- the circuit board 3 is arranged with respect to the jig 71 so that the first surface 3A thereof faces the inner jig 72, and the vicinity of the intermediate rigid portion 14 is the outer jig 73 and the inner jig 72. It is gripped between the flat surface 72c and the flat surface 72c.
- the first rigid portion 11 and the second rigid portion 12 are bent as shown by arrows P, respectively, using an appropriate device or tool, and the first and second flexible portions 13A and 13B are used as inner jigs. Pressurize along the curved surfaces 72a and 72b of 72.
- the circuit board 3 is bent while the tip of the non-thinned portion 62 (that is, the first surface 3A of the circuit board 3) formed in a plurality of divisions abuts on the curved surface 72a of the inner jig 72, and the desired curvature is obtained.
- the shape is obtained.
- the bending angle of each thinned portion 61 is regulated by the interference of two adjacent non-thinned portions 62 with each other. Therefore, a part of the thinned portion 61 is not bent excessively and stress is not concentrated.
- the flexible portion 13 (first flexible portion 13A, second flexible portion 13B) is configured by the plurality of thinning portions 61 and the non-thinning portions 62 arranged alternately. , Cracks are less likely to occur compared to the conventional configuration in which the entire flexible portion is uniformly thinned.
- FIG. 13 is a cross-sectional view of a main part showing a second embodiment in which the shape of the groove portion of the thinned portion 61 is changed.
- the bottom surface 101a of the concave groove 101 serving as the thinning portion 61 is formed by being curved in an arc shape in cross section.
- the pair of side surfaces 101b of the groove 101 are parallel to each other.
- FIG. 14 is a cross-sectional view of a main part showing a third embodiment in which the shape of the groove portion of the thinned portion 61 is changed.
- the widening portion 102a is provided at the bottom of the concave groove 102 serving as the thinning portion 61, and the bottom portion is formed so as to form a substantially T shape as a whole.
- the pair of side surfaces 102b of the groove 102 are parallel to each other.
- Both end portions 102c of the widening portion 102a are rounded in an arc shape (for example, a semicircle), and the corner portion 102d from the side surface 102b to the widening portion 102a is also rounded in an arc shape (for example, a quarter circle).
- FIG. 15 is a cross-sectional view of a main part showing a fourth embodiment in which the shape of the groove portion of the thinned portion 61 is changed.
- the concave groove 103 serving as the thinned portion 61 is formed in a V-groove shape. That is, the pair of side surfaces 103a are formed so as to be symmetrical with each other, and the bottom portion is a sharp end.
- FIG. 16 is a cross-sectional view of a main part showing a fifth embodiment in which the shape of the groove portion of the thinned portion 61 is changed.
- the concave groove 104 serving as the thinning portion 61 is formed in a V-groove shape in which the pair of side surfaces 104a are inclined so as to be symmetrical with each other as in the fourth embodiment, and the bottom portion thereof. Is a flat bottom surface 104b.
- FIG. 17 is a cross-sectional view of a main part showing a sixth embodiment in which the shape of the groove portion of the thinned portion 61 is changed.
- the concave groove 105 serving as the thinning portion 61 is formed in a V-groove shape in which the pair of side surfaces 105a are inclined so as to be symmetrical with each other, as in the fourth and fifth embodiments.
- the bottom portion is provided with a circular groove portion 105b bulging in a circular cross section.
- FIG. 18 is a cross-sectional view of a main part showing a seventh embodiment in which the shape of the groove portion of the thinned portion 61 is changed.
- the concave groove 106 serving as the thinned portion 61 has an inverted V shape in which the width of the bottom surface 106a is wider than the width of the opening portion 16b. That is, the pair of side surfaces 106c are inclined so as to spread toward the bottom, contrary to the fourth to sixth embodiments, and are symmetrical with each other. Both ends of the bottom surface 106a, that is, the connecting portions with the side surface 106c are rounded in an arc shape.
- the groove opening of the thinned portion 61 having a concave groove shape is curved. Although it is bent so as to face the inner peripheral side of the above, the present invention can also be bent in the opposite direction. That is, as shown in FIG. 19, the groove opening of the thinned portion 61 having a concave groove shape can be bent so as to face the outer peripheral side of the curve. Even in this case, the generation of cracks is suppressed.
- the thickness of the non-thinned portion 62 is equal to the thickness of the circuit board 3 (in other words, the thickness of the first and second rigid portions 11 and 12). Not limited to this.
- the non-thinning portion 62 one layer or two layers on the first surface 3A side may be scraped off to make the thickness thinner than the first and second rigid portions 11 and 12. That is, the non-thinned portion 62 may be formed to be relatively thicker than the thinned portion 61.
- the thinned portion 61 and the non-thinned portion 62 are formed along a parallel straight line orthogonal to the substrate center line M (see FIG. 6) which is the bending direction, whereby the substrate center is formed. Two-dimensional bending is realized in which the line M is on one plane.
- the substrate center line M which is the bending direction
- Two-dimensional bending is realized in which the line M is on one plane.
- by forming at least one of the thinned portion 61 and the non-thinned portion 62 so as to form a triangle or a fan shape in a plan view it is possible to realize a three-dimensionally curved shape. be.
- the present invention An electronic device in which a multi-layered wiring board having a plurality of wiring layers is housed in an exterior member in a bent state.
- the wiring board comprises at least two component mounting portions on which electronic components are mounted, and a flexible portion located between these component mounting portions and having relatively high flexibility.
- the flexible portion includes a plurality of concave groove-shaped thinned portions having a relatively thin substrate thickness, and a plurality of non-thinned portions having a substrate thickness equal to that of the component mounting portion or at least relatively thicker than the thinned portion.
- the thinned parts and the thinned parts are arranged alternately.
- the wiring board has a first surface facing the inner peripheral side and a second surface facing the outer peripheral side in a bent state. The thinned portion is formed on the first surface.
- the dimensions of the thinned portion are such that the two non-thinned portions adjacent to each other across the thinned portion do not interfere with each other in the standard bent state and exceed the standard bent state. It is set to interfere with each other in a predetermined excessive bending state.
- the width of the thinned portion is smaller than the depth of the thinned portion having a concave groove shape.
- the width of the non-thinned portion is smaller than the depth of the concave groove-shaped thinned portion.
- the substrate thickness in the thinned portion is smaller than the depth of the thinned portion having a concave groove shape.
- the widths of the plurality of thinned portions are the same as each other.
- the widths of the plurality of non-thinned portions are the same as each other.
- non-thinned portions having different widths may be included so as to follow a desired bent shape.
- the wiring board has two component mounting portions located facing each other in a bent state, a flat intermediate rigid portion located between the two component mounting portions, and each component mounting portion. It includes two curved flexible portions located between the intermediate rigid portion and the intermediate rigid portion, and is configured to form a substantially U shape as a whole.
- the present invention further includes a method of manufacturing these electronic devices.
- This manufacturing method A plurality of thinned parts are machined into a concave groove shape in the area to be the flexible part of the flat wiring board.
- an inner jig including a curved surface corresponding to the curved shape of the flexible portion and a flat surface connected to one end of the curved surface, and an outer jig arranged to face the flat surface.
- the non-thinned portion facing the inner jig, the region adjacent to the flexible portion of the wiring board is gripped.
- the flexible portion is curved by applying pressure to the wiring board along the curved surface of the inner jig.
Landscapes
- Engineering & Computer Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Manufacturing & Machinery (AREA)
- Structure Of Printed Boards (AREA)
Abstract
ガラスエポキシ等からなる回路基板(3)は、部品実装部となる第1,第2リジッド部(11,12)と、可撓性を有するフレキシブル部(13)(第1,第2フレキシブル部(13A,13B))と、を有する。フレキシブル部(13)は、二次的な機械加工で基板厚さを薄くした複数の薄化部(61)と、基板厚さをそのまま残存させた非薄化部(62)と、が交互に配置されて構成される。複数の薄化部(61)において少しずつ角度が変化するので、クラックが生じにくい。隣接する非薄化部(62)同士の干渉により局部的な過度の曲げが防止される。
Description
この発明は、撓めた状態で外装部材に収容することができる折り曲げ可能な多層配線基板を用いた電子装置に関する。
特許文献1には、パワーステアリング装置のモータユニット内に組み込む回路基板として、複数のリジッド基板部を該リジッド基板部よりも薄く可撓性を有する折曲部で連結することにより、略U字形に折り曲げた形で使用することができるようにした回路基板が開示されている。
折曲部は、多層配線基板の板厚の一部を機械加工により切削して薄肉化することで構成されている。
特許文献1に開示されている実施例では、一対のリジッド基板部と両者間の中間リジッド基板部との間において、薄肉に構成された一対の折曲部がそれぞれ略90°湾曲した構成となっているが、このように大きな角度で曲げられる結果、折曲部にクラックが発生しやすい。特に、リジッド基板部と薄肉化した折曲部との境界に応力が集中し、クラックが発生しやすい。
本発明によれば、その一つの態様において、電子装置は、複数の配線層を有する多層の配線基板が折り曲げ状態でもって外装部材に収容されている。上記配線基板は、電子部品が実装される少なくとも2つの部品実装部と、これらの部品実装部の間に位置し、相対的に高い可撓性を有するフレキシブル部と、を備え、上記フレキシブル部は、基板厚さを相対的に薄くした複数の凹溝状の薄化部と、基板厚さが部品実装部と同一ないし少なくとも薄化部よりも相対的に厚く残存した複数の非薄化部と、が交互に配置されて構成されている。
このような構成では、フレキシブル部全体として必要な曲げ角度に対して、1つの薄化部とこれを挟んで隣接する2つの非薄化部とで形成される個々の部分での曲げ角度が小さくなる。つまり、複数の薄化部において少しずつ角度が変化し、この個々の小さな角度変化の集合としてフレキシブル部に必要な曲げ角度が実現される。そのため、フレキシブル部におけるクラックの発生が抑制される。
以下、この発明を例えば自動車の電動パワーステアリング装置の制御装置に適用した一実施例について、図面に基づいて詳細に説明する。
図1は、電動パワーステアリング装置において図示せぬステアリング機構に操舵補助力を与える電動アクチュエータ装置の分解斜視図である。また、図2は、電動アクチュエータ装置の断面図である。この電動アクチュエータ装置は、円筒形状のモータ部1と、インバータ・パワーモジュール2と、本発明の一実施例となる折り曲げ可能な多層配線基板からなる回路基板3と、複数のコネクタを一体に集合させたコネクタ部材4と、これらのインバータ・パワーモジュール2、回路基板3、コネクタ部材4を覆うように、上記モータ部1の一端部に取り付けられるモータカバー5と、を備えている。
モータ部1は、ステータ1Bおよびロータ1Cからなる電動アクチュエータに相当するモータ1A(図2)が円筒状のハウジング7の内部に収容されたものであり、ハウジング7の先端面から突出した回転軸6の先端にギヤないしスプライン等の連結部6aを有し、この連結部6aを介して図外のステアリング機構に連結される。モータ1Aは、三相の永久磁石型ブラシレスモータであり、ステータ1Bが三相のコイルを備え、ロータ1Cの外周面に永久磁石が配置されている。ここで、モータ1Aは、冗長性を与えるために、2系統のコイルおよび対応する永久磁石を備えている。
連結部6aとは反対側となるハウジング7の一端部は、外周縁の一部が半径方向へ延びた馬蹄型の輪郭を有する底壁部7aとして構成されており、この底壁部7aを覆うように、該底壁部7aに対応した馬蹄型の輪郭を有するモータカバー5が取り付けられる。そして、底壁部7aとモータカバー5との間に構成される空間内に、インバータ・パワーモジュール2と回路基板3とコネクタ部材4とが回転軸6の軸方向に重ねて収容されている。つまり、この実施例では、ハウジング7とモータカバー5とが請求項における外装部材に相当する。
インバータ・パワーモジュール2は、モータ1Aを駆動する2つのインバータモジュール2Aと、コイルの中性点リレーとなるリレーモジュール2Bと、を含み、これら三者が回転軸6を囲む略U字形をなすように配置されている。そして、これらのインバータモジュール2Aおよびリレーモジュール2Bが、押さえ部材2Cを介してモータ部1の端面に固定されている。
コネクタ部材4は、回転軸6の軸方向に沿った同じ方向を指向する3つのコネクタを備えている。詳しくは、中央に位置する電源用コネクタ4aと、ステアリング機構側に配置されるセンサ類(例えば舵角センサやトルクセンサなど)からの信号が入力されるセンサ入力用コネクタ4bと、車内の他の制御機器との間で通信(例えばCAN通信)を行うための通信用コネクタ4cと、を備えている。これらのコネクタ4a,4b,4cは、モータカバー5の開口部8を通して外部へ突出している。
図3は、略U字形に折り曲げた状態における回路基板3の概略を示す斜視図であり、図4は側面図である。回路基板3は、前述したように、これらの図3,図4に示すように、略U字形に折り曲げた形でもって「電子装置」に相当する電動アクチュエータ装置に組み込まれている。
すなわち、回路基板3は、インバータ・パワーモジュール2を介したモータ1Aの駆動のために相対的に大きな電流が流れる電子部品群を実装したパワー系基板となる第1リジッド部11と、相対的に小さな電流が流れる制御系電子部品を実装した制御系基板となる第2リジッド部12と、両者間のフレキシブル部13と、を備えている。第1リジッド部11および第2リジッド部12はそれぞれ「部品実装部」に相当する。そして、回路基板3は、これらの第1リジッド部11と第2リジッド部12とが回転軸6の軸方向に互いに重なり合った形となるようにフレキシブル部13が撓み変形した状態でもって、外装部材となるハウジング7とモータカバー5との間に収容されている。具体的な実施例においては、折り曲げ状態となった第1リジッド部11と第2リジッド部12とは、各々に実装された電子部品が互いに接触しない程度の距離だけ離れているとともに、各々平面状態を保ちつつ互いに平行となった状態でもって電動アクチュエータ装置に固定支持されている。
図5は、回路基板3を展開した状態つまり折り曲げる前の状態でもって示した断面図である(基板部分のハッチングは省略してある)。1枚の多層配線基板からなる回路基板3は、第1面3Aと第2面3Bとを備えている。図6は、回路基板3を展開した状態における第1面3Aの構成を示す平面図、図7は、第2面3Bの構成を示す平面図、である。回路基板3は、これらの図5~図7に示すような展開した状態で、第1リジッド部11および第2リジッド部12とフレキシブル部13とが一つの平面に沿った1枚の回路基板として形成されたものであり、部品実装後に最終的に略U字形に折り曲げられる。
第1リジッド部11および第2リジッド部12は、それぞれ四隅に取付孔15を備えた四角形に近似した形状をなしている。そして、互いに隣接した第1リジッド部11の1辺の中央部と第2リジッド部12の1辺の中央部とが、一定幅の帯状をなすフレキシブル部13でもって互いに連結されている。つまり、フレキシブル部13は、第1リジッド部11および第2リジッド部12の幅(曲げ方向に直交する方向の寸法)に比較して、その幅が狭くなっている。従って、回路基板3は、全体としてI字状ないし8の字状をなしている。このように第1,第2リジッド部11,12の幅が相対的に広くかつフレキシブル部13の幅が相対的に狭い構成とすることで、部品実装面積を大きく確保できる一方で、フレキシブル部13における撓み変形が容易となる。
回路基板3は、多層のプリント配線基板、具体的には6層の配線層つまり金属箔層51A~51F(図11参照)を備えたいわゆる6層構造のプリント配線基板から構成されている。この多層プリント配線基板は、片面もしくは両面に金属箔層を備えた例えばガラスエポキシからなる何層かの基材をプリプレグ(接着剤層)を介して積層し、かつ加熱加圧して一体化することにより構成されている。従って、第1面3Aおよび第2面3Bのそれぞれの表層の金属箔層51A,51F(図11参照)と、4つの内層の金属箔層51B~51E(図11参照)と、によって配線層となる6層の金属箔層が構成されている。金属箔層の間には、これら金属箔層の間を絶縁する絶縁層としての基材が介在する。そして、第1リジッド部11および第2リジッド部12においては、これらの6層の金属箔層のエッチングならびに積層方向に延びるビアの形成によって、所望の回路パターンが形成されている。
この実施例の回路基板3は、モータ1Aの2系統のコイルに対応して互いに独立した2つの制御系統を具備している。基本的に個々の1つの制御系統は、回路基板3にその長手方向であるL方向(図6,図7参照)に沿って部品を配列して構成されており、2つの制御系統は、基本的に回路基板3の幅方向であるW方向に並んで構成されている。細部の差異を除くと、2つの制御系統は、基板中心線Mを中心として対称に構成されている。
図6に示すように、第1リジッド部11の第1面3Aにおいては、該第1リジッド部11のL方向の中央部付近に、ノイズ除去のための2つのフィルタ部31が配置されており、これらフィルタ部31よりもフレキシブル部13とは反対側となる位置に、2つの電源コンデンサ部34が配置されている。すなわち、1つの制御系統に1つのフィルタ部31と1つの電源コンデンサ部34とが含まれている。フィルタ部31は、矩形状のケースを備えたコイル32と、このコイル32よりもフレキシブル部13寄りに位置する同じく矩形状のケースを備えたコンデンサ33と、から構成される。また、電源コンデンサ部34は複数例えば3つの矩形状のケースを備えたコンデンサ34A,34B,34Cを含んで構成される。
また、フィルタ部31のコンデンサ33とフレキシブル部13との間には、各制御系統に2つずつ計4つの電源遮断用スイッチング素子35が実装されている。各制御系統の2つの電源遮断用スイッチング素子35はコンデンサ33に隣接して配置されている。
第1リジッド部11の第1面3Aにおいて、2つのフィルタ部31の間には、モータ1Aの回転を検出する第2回転センサ38が実装されている。この第2回転センサ38は、モータ1Aの回転軸6の端部に設けられた磁極と組み合わされて該回転軸6の回転を検出するアナログ式の回転センサであり、組立時に回転軸6の中心軸線上となる位置に配置されている。この第2回転センサ38は、2つの制御系統に共用されるものであり、第1リジッド部11上で2つの信号回路に分岐されて、各々の制御系統で利用される。
第1リジッド部11の一対の側縁部11aには、それぞれ第1電源端子40が取り付けられている。各々の第1電源端子40は、正極端子40Aと負極端子40Bとを含んでおり、正極端子40Aと負極端子40Bとからなる1組の第1電源端子40が1つの制御系統にそれぞれ対応している。
正極端子40Aおよび負極端子40Bは、それぞれ略L字形に折り曲げられた金属片からなり、第1リジッド部11の側縁に沿って第1面3Aから該第1面3Aに直交するように立ち上がっている。正極端子40Aと負極端子40Bは、L方向に沿って並んで配置されている。電動アクチュエータ装置として最終的に組み立てられた状態では、第1電源端子40は、上述したコネクタ部材4の電源用コネクタ4aの端子片に接続される。2組の第1電源端子40は、基板中心線Mを中心として互いに対称に構成されている。
第1リジッド部11は、さらに、インバータ・パワーモジュール2の各アームのスイッチング素子に接続されるゲート信号ポート41と、インバータ・パワーモジュール2に電源電圧を供給するためのインバータ電源ポート42と、を備えている。これらは、いずれもスルーホール状の端子として形成されている。電動アクチュエータ装置として最終的に組み立てられた状態では、これらのポート41,42に、インバータ・パワーモジュール2のピン状の端子片が挿入され、かつ電気的に接続される。
第2リジッド部12の第1面3Aにおいては、該第2リジッド部12の中央部付近に、2つの制御系統にそれぞれ対応する2つのCPU21が実装されている。CPU21は、略正方形の偏平なパッケージを有する集積回路からなる。2つのCPU21よりもフレキシブル部13寄りの位置には、プリドライバ回路素子22がそれぞれ実装されている。プリドライバ回路素子は、CPU21よりも小さな略正方形の偏平なパッケージを有する集積回路からなる。
第2リジッド部12の一対の側縁部12aには、折り曲げた状態における前述した第1リジッド部11の第1電源端子40との干渉を避けるための切欠部24がそれぞれ形成されている。また、各々の切欠部24に沿った位置に、正負2つのスルーホールからなる第2電源端子25が設けられている。これら2組の第2電源端子25は、それぞれの制御系統に対応している。電動アクチュエータ装置として最終的に組み立てられた状態では、スルーホール状の第2電源端子25に、上述したコネクタ部材4の電源用コネクタ4aのピン状の端子片が挿入され、電気的に接続される。
第2リジッド部12のフレキシブル部13寄りの端部領域には、複数のスルーホール状の端子からなる外部センサ入力部27が設けられている。複数のスルーホール状の端子は、W方向に沿った一直線上に並んで配置されている。電動アクチュエータ装置として最終的に組み立てられた状態では、コネクタ部材4のセンサ入力用コネクタ4bのピン状の端子片が外部センサ入力部27に挿入され、舵角センサやトルクセンサ等の外部センサの信号が外部センサ入力部27を介して各制御系統に入力される。
また、第2リジッド部12のフレキシブル部13とは反対側となる端部領域には、複数のスルーホール状の端子からなる通信用ポート28が設けられている。複数のスルーホール状の端子は、W方向に沿った一直線上に並んで配置されている。電動アクチュエータ装置として最終的に組み立てられた状態では、コネクタ部材4の通信用コネクタ4cのピン状の端子片が通信用ポート28に挿入され、外部の他の制御機器との間で通信が行われる。
図7に示すように、第1リジッド部11の第2面3Bにおいては、中央部に、モータ1Aの回転を検出する第1回転センサ37が実装されている。この第1回転センサ37は、モータ1Aの回転軸6の端部に設けられた磁極と組み合わされて該回転軸6の回転を検出するデジタル式の回転センサであり、組立時に回転軸6の中心軸線上となる位置に配置されている。この第1回転センサ37は、第2回転センサ38と同様に2つの制御系統に共用されるものであり、第1リジッド部11上で2つの信号回路に分岐されて、各々の制御系統で利用される。
第2面3Bに配置された第1回転センサ37と第1面3Aに配置された第2回転センサ38は、回路基板3を投影して見たときに、互いに重なる位置にある。電動アクチュエータ装置として最終的に組み立てられた状態では、略U字形をなす回路基板3の外側面に第1回転センサ37があり、回転軸6の端面に対向する。第2回転センサ38は、略U字形をなす回路基板3の内側となる。一実施例においては、第1回転センサ37が主たる回転センサであり、第2回転センサ38は例えば第1回転センサ37の異常時に利用される予備的な回転センサである。
第2リジッド部12の第2面3Bにおいては、第2リジッド部12用の電源回路と通信用ポート28用の通信回路とを含む集積回路からなる2つの電源/通信IC29が実装されている。電源/通信IC29は、CPU21よりも小さな略正方形の偏平なパッケージを有する。2つの電源/通信IC29は、2つの制御系統にそれぞれ対応している。
電源/通信IC29は、通信用ポート28を介して外部の他の制御機器との間で通信を行う。さらに電源/通信IC29は、第2電源端子25に入力された端子電圧を第2リジッド部12用の作動電圧に変換する。
以上、主要な電子部品の配置について説明したが、第1リジッド部11および第2リジッド部12には、上記の電子部品のほかにも、図示を省略した比較的小型の多数の電子部品が表面実装されている。
次に、図8~図11を参照して本発明の要部であるフレキシブル部13について説明する。
フレキシブル部13は、図8および図11に拡大して示すように、6層構造を有する第1リジッド部11および第2リジッド部12の基板の厚さ(積層方向の寸法)に比較して相対的に薄く形成した複数の凹溝状の薄化部61と、第1リジッド部11や第2リジッド部12と同一の厚さに残存した幅の狭い複数の非薄化部62と、を交互に配置することによって、第1リジッド部11および第2リジッド部12よりも高い可撓性を有するように構成されている。一実施例においては、第1リジッド部11,第2リジッド部12およびフレキシブル部13を包含する例えば矩形状に6層構造の回路基板3を形成した後に、二次的な機械加工によって、フレキシブル部13における折り曲げ時に内側となる第1面3A側の4層分を削り取り、薄肉化して、複数の薄化部61を形成してある。
すなわち、図11に示すように、回路基板3は、6層の金属箔層51A~51Fを有しているが、薄化部61においては、4層の金属箔層51A~51Dが削り取られており、2層の金属箔層51E,51Fのみが残存している。
薄化部61は、回路基板3の第1面3Aにおいて凹溝状に窪んでいる。回路基板3の第2面3Bにおいては、フレキシブル部13は、第1,第2リジッド部11,12と連続した面を有している。
従って、第1,第2リジッド部11,12の基材とフレキシブル部13の基材とは同じ材質であり、かつフレキシブル部13の薄化部61において残存する第2面3B側の2層の金属箔層51E,51Fは、第1,第2リジッド部11,12およびフレキシブル部13の三者に亘って連続している(図11参照)。このフレキシブル部13において残存する2層の金属箔層51E,51Fによって、第1リジッド部11と第2リジッド部12との間に必要な回路配線が構成されている。
ここで、図示例では、図4,図5等に示すように、バーコード等の印刷面を確保するためにフレキシブル部13の中央部に中間リジッド部14を6層構造のまま残してある。従って、フレキシブル部13は、実際に可撓性を有する部分としては、中間リジッド部14の両側に位置する第1,第2フレキシブル部13A,13Bとして2つに分割されて構成されている。図示例では、第1フレキシブル部13Aおよび第2フレキシブル部13Bは、それぞれ90°曲がっており、全体として180°の曲げ角度を実現している。なお、中間リジッド部14は、必須のものではなく、一連に連続したフレキシブル部13によって180°の曲げ角度を実現するようにしてもよい。本実施例では、便宜上、中間リジッド部14を含めて、第1リジッド部11と第2リジッド部12との間の全体をフレキシブル部13と呼ぶ。実施例の中間リジッド部14は、6層の金属箔層51A~51Fを有するが、第2面3B側から見て3層目~6層目に相当する金属箔層51A~51Dは配線パターンの形成には使用されていない。
薄化部61は、回路基板3の第1面3Aの側に、断面矩形の凹溝状に形成されている。この薄化部61の形成により、隣接する2つの薄化部61の間に、非薄化部62が残存する。複数の薄化部61および非薄化部62は、図6,図7に示した回路基板3の幅方向(W方向)に沿って平行に延びている。換言すれば、回路基板3の長手方向(L方向)と直交する方向に複数の薄化部61が形成されており、これにより、第1リジッド部11と第2リジッド部12とが互いに重なり合うように折り曲げることが可能である。個々の薄化部61および非薄化部62は、図6,図7に示す平面視では直線状であり、また個々の薄化部61および非薄化部62は、それぞれ一定の幅でもって図6,図7のW方向に延びている。
図8の例では、第1フレキシブル部13Aおよび第2フレキシブル部13Bは、それぞれ9個の薄化部61と8個の非薄化部62とを含んでいる。勿論、本発明は、このような具体的な個数に限定されるものではなく、回路基板3の材質や板厚あるいは必要な曲げ角度等に応じて、適当な個数の薄化部61および非薄化部62を設けることができる。なお、図示例では、第1フレキシブル部13Aと第2フレキシブル部13Bとが実質的に同じ構成となっているが、両者が異なる構成であってもよい。
図9の(a)は、第1,第2フレキシブル部13A,13Bの曲げ加工前の状態(つまり直線状態)を示し、(b)は、曲げ加工した状態を示している。両者の比較から明らかなように、第1,第2フレキシブル部13A,13Bを全体として例えば90°曲げたときに、1つの薄化部61とこれを挟んで隣接する2つの非薄化部62とで比較的小さな曲げ角度が形成される。つまり、複数の薄化部61において少しずつ角度が変化し、この個々の小さな角度変化の集合として第1,第2フレキシブル部13A,13Bに必要な曲げ角度(例えば90°)が実現される。そのため、個々の薄化部61と非薄化部62との境界における応力が小さくなり、クラックの発生が抑制される。
ここで、1つの薄化部61を挟んで隣接する2つの非薄化部62は、フレキシブル部13A,13Bを曲げるに伴って図9(b)に示すように互いに傾いて接近していく。好ましい一つの実施例では、薄化部61を挟んで隣接する2つの非薄化部62が、基準の折り曲げ状態では互いに干渉せず、他方、基準の折り曲げ状態を越えた所定の過剰折り曲げ状態では互いに干渉するように、薄化部61の寸法(凹溝の幅および深さ)が設定されている。「所定の過剰折り曲げ状態」は、薄化部61にクラックが生じない範囲に設定される。
従って、例えば曲げ加工時に第1,第2フレキシブル部13A,13Bを構成する全ての薄化部61が均等に曲がらずに一部の薄化部61の曲げ角度が相対的に大きくなった場合に、隣接する2つの非薄化部62同士が干渉することで当該薄化部61の曲げ角度が所定の過剰折り曲げ状態に制限され、それ以上に曲げられることがない。そのため、クラックの発生がより確実に抑制される。
図10に示すように、寸法L1を薄化部61の幅、L2を薄化部61の深さ、L3を非薄化部62の幅、L4を薄化部61における基板厚さ、と定義すると、薄化部61の幅L1は、当該薄化部61の深さL2よりも小さい。これにより、1つの薄化部61における曲げ角度(つまり単位曲げ角度)が比較的小さく制限される。また、非薄化部62の幅L3は、薄化部61の深さL2よりも小さい。つまり、非薄化部62は、比較的小さな幅L3に分割されている。また、薄化部61における基板厚さL4は、薄化部61の深さL2よりも小さい。これにより、良好な可撓性が得られる。
図示例では、複数の薄化部61について、各々の薄化部61の幅L1が互いに同一である。また、複数の非薄化部62について、各々の非薄化部62の幅L3が互いに同一である。これにより、第1,第2フレキシブル部13A,13B全体として、一定の曲率半径に沿った曲げ状態を得ることができる。
但し、本発明は、これには限定されず、所望の折り曲げ形状に沿うように薄化部61の幅L1や非薄化部62の幅L3を不均一とすることができる。なお、複数の薄化部61における応力を均一化するためには、薄化部61の幅L1は一定とし、非薄化部62の幅L3を適宜に変化させることが好ましい。
図12は、複数の薄化部61を形成した平坦な回路基板3を最終的に略U字形に折り曲げる折り曲げ工程を示した説明図である。回路基板3の折り曲げ加工は、内側治具72と外側治具73とを組み合わせてなる治具71を用いて行う。内側治具72は、第1,第2フレキシブル部13A,13Bの所望の湾曲形状に対応した一対の湾曲面72a,72bと、湾曲面72aの一端と湾曲面72bの一端とに接続された平坦面72cと、を有している。また、外側治具73は、平坦面72cに対向した平坦面73aを有している。
曲げ加工に際しては、治具71に対して回路基板3をその第1面3Aが内側治具72へ向かうような向きでもって配置し、中間リジッド部14付近を外側治具73と内側治具72の平坦面72cとの間で把持する。この状態で、適宜な装置ないし工具を用いて、第1リジッド部11および第2リジッド部12をそれぞれ矢印Pで示すように折り曲げていき、第1,第2フレキシブル部13A,13Bを内側治具72の湾曲面72a,72bに沿って加圧する。
これにより、複数に分割形成された非薄化部62の先端(つまり回路基板3の第1面3A)が内側治具72の湾曲面72aに当接しながら回路基板3が曲げられ、所望の湾曲形状が得られる。前述したように、個々の薄化部61の曲げ角度は、隣接する2つの非薄化部62が互いに干渉することによって規制される。従って、一部の薄化部61が過度に大きく曲がって応力が集中するようなことがない。
このように、上記実施例では、交互に配置される複数の薄化部61と非薄化部62とによってフレキシブル部13(第1フレキシブル部13A、第2フレキシブル部13B)が構成されているため、フレキシブル部の全体を一様に薄肉化した従来の構成に比較して、クラックが発生しにくい。
図13は、薄化部61の溝部形状を変更した第2実施例を示す要部の断面図である。この第2実施例では、薄化部61となる凹溝101の底面101aが断面円弧形に湾曲して形成されている。これにより、薄化部61と非薄化部62との境界における応力集中が緩和される。凹溝101の一対の側面101bは、互いに平行である。
図14は、薄化部61の溝部形状を変更した第3実施例を示す要部の断面図である。この第3実施例においては、薄化部61となる凹溝102の底部に拡幅部102aを備えており、全体として略T字形をなすように底部が拡がって形成されている。凹溝102の一対の側面102bは互いに平行である。拡幅部102aの両端部102cは円弧形(例えば半円形)に丸められており、また側面102bから拡幅部102aに至るコーナ部分102dも円弧形(例えば四分円)に丸められている。このように各部が円弧形をなすことで、応力集中が緩和される。
図15は、薄化部61の溝部形状を変更した第4実施例を示す要部の断面図である。この第4実施例においては、薄化部61となる凹溝103は、V溝状に形成されている。つまり、一対の側面103aが互いに対称をなすように傾いて形成されており、底部は鋭端となっている。
図16は、薄化部61の溝部形状を変更した第5実施例を示す要部の断面図である。この第5実施例においては、薄化部61となる凹溝104は、第4実施例と同様に一対の側面104aが互いに対称をなすように傾いたV溝状に形成されており、かつ底部が平坦な底面104bとなっている。
図17は、薄化部61の溝部形状を変更した第6実施例を示す要部の断面図である。この第6実施例においては、薄化部61となる凹溝105は、第4,第5実施例と同様に一対の側面105aが互いに対称をなすように傾いたV溝状に形成されており、かつ底部に、断面円形に膨らんだ円形溝部105bを備えている。
図18は、薄化部61の溝部形状を変更した第7実施例を示す要部の断面図である。この第7実施例においては、薄化部61となる凹溝106は、底面106aの幅が開口部16bの幅よりも広くなった逆V字形をなしている。つまり、一対の側面106cは、第4~第6実施例とは逆に底部へ向かって拡がっていくように傾いており、かつ互いに対称をなしている。底面106aの両端つまり側面106cとの接続部分は円弧形に丸められている。
図8,図9等に示した実施例では、薄化部61および非薄化部62を交互に配置してなるフレキシブル部13は、凹溝状をなす薄化部61の溝開口部が湾曲の内周側に面するように折り曲げられているが、本発明は、逆向きに折り曲げた構成も可能である。すなわち、図19に示すように、凹溝状をなす薄化部61の溝開口部が湾曲の外周側に面するように折り曲げることができる。この場合でも、クラック発生が抑制される。
以上、この発明の一実施例を詳細に説明したが、この発明は上記実施例に限定されるものではなく、種々の変更が可能である。例えば、上記実施例では、非薄化部62の厚さが回路基板3の厚さ(換言すれば第1,第2リジッド部11,12の厚さ)と等しくなっているが、本発明はこれには限定されない。例えば、非薄化部62において、第1面3A側の1層分あるいは2層分程度を削り取り、第1,第2リジッド部11,12よりも薄肉化してあってもよい。つまり、非薄化部62は、薄化部61に比較して相対的に厚く形成されていればよい。
また、上記実施例では、薄化部61や非薄化部62が折り曲げ方向となる基板中心線M(図6参照)に直交する平行な直線に沿って形成されており、これにより、基板中心線Mが一つの平面上にある二次元的な折り曲げが実現されている。本発明においては、例えば、薄化部61および非薄化部62の少なくとも一方を平面視で三角形ないし扇形をなすように形成することで、三次元的に湾曲した形状を実現することも可能である。
以上のように、本発明は、
複数の配線層を有する多層の配線基板が折り曲げ状態でもって外装部材に収容されてなる電子装置であって、
上記配線基板は、電子部品が実装される少なくとも2つの部品実装部と、これらの部品実装部の間に位置し、相対的に高い可撓性を有するフレキシブル部と、を備え、
上記フレキシブル部は、基板厚さを相対的に薄くした複数の凹溝状の薄化部と、基板厚さが部品実装部と同一ないし少なくとも薄化部よりも相対的に厚く残存した複数の非薄化部と、が交互に配置されて構成されている。
複数の配線層を有する多層の配線基板が折り曲げ状態でもって外装部材に収容されてなる電子装置であって、
上記配線基板は、電子部品が実装される少なくとも2つの部品実装部と、これらの部品実装部の間に位置し、相対的に高い可撓性を有するフレキシブル部と、を備え、
上記フレキシブル部は、基板厚さを相対的に薄くした複数の凹溝状の薄化部と、基板厚さが部品実装部と同一ないし少なくとも薄化部よりも相対的に厚く残存した複数の非薄化部と、が交互に配置されて構成されている。
好ましい一つの態様では、
上記配線基板は、折り曲げ状態で内周側に面する第1面と外周側に面する第2面とを有し、
上記第1面に上記薄化部が形成されている。
上記配線基板は、折り曲げ状態で内周側に面する第1面と外周側に面する第2面とを有し、
上記第1面に上記薄化部が形成されている。
好ましい一つの態様では、上記薄化部の寸法は、当該薄化部を挟んで隣接した2つの非薄化部が、基準の折り曲げ状態では互いに干渉せず、かつ、基準の折り曲げ状態を越えた所定の過剰折り曲げ状態では互いに干渉するように設定されている。
好ましい一つの態様では、上記薄化部の幅は、凹溝状をなす当該薄化部の深さよりも小さい。
好ましい一つの態様では、上記非薄化部の幅は、凹溝状をなす薄化部の深さよりも小さい。
好ましい一つの態様では、上記薄化部における基板厚さは、凹溝状をなす当該薄化部の深さよりも小さい。
好ましい一つの態様では、複数の薄化部の幅が互いに同一である。
好ましい一つの態様では、複数の非薄化部の幅が互いに同一である。
一つの態様では、所望の折り曲げ形状に沿うように幅が異なる非薄化部を含んでいてもよい。
好ましい一つの態様では、上記配線基板は、折り曲げ状態で互いに対向して位置する2つの部品実装部と、これら2つの部品実装部の間に位置する平坦な中間リジッド部と、各々の部品実装部と上記中間リジッド部との間に位置する湾曲した2つのフレキシブル部と、を含み、全体として略U字形をなすように構成されている。
本発明は、さらに、これらの電子装置の製造方法を含む。この製造方法は、
平坦な配線基板の上記フレキシブル部となる領域に複数の薄化部を凹溝状に加工し、
上記フレキシブル部の湾曲形状に対応した湾曲面と該湾曲面の一端に接続された平坦面とを含む内側治具と、上記平坦面に対向して配置される外側治具と、を用いて、上記非薄化部が上記内側治具に面するような向きでもって、上記配線基板の上記フレキシブル部に隣接した領域を把持し、
上記配線基板を上記内側治具の上記湾曲面に沿って加圧することでフレキシブル部を湾曲させる。
平坦な配線基板の上記フレキシブル部となる領域に複数の薄化部を凹溝状に加工し、
上記フレキシブル部の湾曲形状に対応した湾曲面と該湾曲面の一端に接続された平坦面とを含む内側治具と、上記平坦面に対向して配置される外側治具と、を用いて、上記非薄化部が上記内側治具に面するような向きでもって、上記配線基板の上記フレキシブル部に隣接した領域を把持し、
上記配線基板を上記内側治具の上記湾曲面に沿って加圧することでフレキシブル部を湾曲させる。
Claims (11)
- 複数の配線層を有する多層の配線基板が折り曲げ状態でもって外装部材に収容されてなる電子装置であって、
上記配線基板は、電子部品が実装される少なくとも2つの部品実装部と、これらの部品実装部の間に位置し、相対的に高い可撓性を有するフレキシブル部と、を備え、
上記フレキシブル部は、基板厚さを相対的に薄くした複数の凹溝状の薄化部と、基板厚さが部品実装部と同一ないし少なくとも薄化部よりも相対的に厚く残存した複数の非薄化部と、が交互に配置されて構成されている、
電子装置。 - 上記配線基板は、折り曲げ状態で内周側に面する第1面と外周側に面する第2面とを有し、
上記第1面に上記薄化部が形成されている、
請求項1に記載の電子装置。 - 上記薄化部の寸法は、当該薄化部を挟んで隣接した2つの非薄化部が、基準の折り曲げ状態では互いに干渉せず、かつ、基準の折り曲げ状態を越えた所定の過剰折り曲げ状態では互いに干渉するように設定されている、
請求項1または2に記載の電子装置。 - 上記薄化部の幅は、凹溝状をなす当該薄化部の深さよりも小さい、
請求項1~3のいずれかに記載の電子装置。 - 上記非薄化部の幅は、凹溝状をなす薄化部の深さよりも小さい、
請求項1~4のいずれかに記載の電子装置。 - 上記薄化部における基板厚さは、凹溝状をなす当該薄化部の深さよりも小さい、
請求項1~5のいずれかに記載の電子装置。 - 複数の薄化部の幅が互いに同一である、
請求項1~6のいずれかに記載の電子装置。 - 複数の非薄化部の幅が互いに同一である、
請求項1~7のいずれかに記載の電子装置。 - 所望の折り曲げ形状に沿うように幅が異なる非薄化部を含む、
請求項7に記載の電子装置。 - 上記配線基板は、折り曲げ状態で互いに対向して位置する2つの部品実装部と、これら2つの部品実装部の間に位置する平坦な中間リジッド部と、各々の部品実装部と上記中間リジッド部との間に位置する湾曲した2つのフレキシブル部と、を含み、全体として略U字形をなすように構成されている、
請求項1~9のいずれかに記載の電子装置。 - 平坦な配線基板の上記フレキシブル部となる領域に複数の薄化部を凹溝状に加工し、
上記フレキシブル部の湾曲形状に対応した湾曲面と該湾曲面の一端に接続された平坦面とを含む内側治具と、上記平坦面に対向して配置される外側治具と、を用いて、上記非薄化部が上記内側治具に面するような向きでもって、上記配線基板の上記フレキシブル部に隣接した領域を把持し、
上記配線基板を上記内側治具の上記湾曲面に沿って加圧することでフレキシブル部を湾曲させる、
請求項1~10のいずれかに記載の電子装置の製造方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022569841A JPWO2022130980A1 (ja) | 2020-12-14 | 2021-12-01 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020206407 | 2020-12-14 | ||
| JP2020-206407 | 2020-12-14 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022130980A1 true WO2022130980A1 (ja) | 2022-06-23 |
Family
ID=82057577
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/044082 WO2022130980A1 (ja) | 2020-12-14 | 2021-12-01 | 電子装置およびその製造方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2022130980A1 (ja) |
| WO (1) | WO2022130980A1 (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61168990A (ja) * | 1985-01-22 | 1986-07-30 | 松下電器産業株式会社 | プリント回路基板 |
| JPS62193780U (ja) * | 1986-05-30 | 1987-12-09 | ||
| JPH0575218A (ja) * | 1991-06-19 | 1993-03-26 | Hitachi Ltd | 成形基板 |
| JP2006295038A (ja) * | 2005-04-14 | 2006-10-26 | Matsushita Electric Ind Co Ltd | 立体構成電子回路ユニットの製造方法 |
| JP2009302343A (ja) * | 2008-06-13 | 2009-12-24 | Denso Corp | 多層基板及びその製造方法 |
| JP2011108922A (ja) * | 2009-11-19 | 2011-06-02 | Murata Mfg Co Ltd | 回路基板 |
| JP2014160776A (ja) * | 2013-02-20 | 2014-09-04 | Murata Mfg Co Ltd | 回路基板およびその製造方法 |
-
2021
- 2021-12-01 JP JP2022569841A patent/JPWO2022130980A1/ja active Pending
- 2021-12-01 WO PCT/JP2021/044082 patent/WO2022130980A1/ja active Application Filing
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61168990A (ja) * | 1985-01-22 | 1986-07-30 | 松下電器産業株式会社 | プリント回路基板 |
| JPS62193780U (ja) * | 1986-05-30 | 1987-12-09 | ||
| JPH0575218A (ja) * | 1991-06-19 | 1993-03-26 | Hitachi Ltd | 成形基板 |
| JP2006295038A (ja) * | 2005-04-14 | 2006-10-26 | Matsushita Electric Ind Co Ltd | 立体構成電子回路ユニットの製造方法 |
| JP2009302343A (ja) * | 2008-06-13 | 2009-12-24 | Denso Corp | 多層基板及びその製造方法 |
| JP2011108922A (ja) * | 2009-11-19 | 2011-06-02 | Murata Mfg Co Ltd | 回路基板 |
| JP2014160776A (ja) * | 2013-02-20 | 2014-09-04 | Murata Mfg Co Ltd | 回路基板およびその製造方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2022130980A1 (ja) | 2022-06-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111656868B (zh) | 电子控制装置 | |
| US10435060B2 (en) | Electronic control device | |
| JP6680054B2 (ja) | 駆動装置、および、これを用いた電動パワーステアリング装置 | |
| CN111512706B (zh) | 电子电路基板以及电子电路装置 | |
| WO2021002374A1 (ja) | 電子装置 | |
| JP2017143287A (ja) | 電子制御装置 | |
| JP7207155B2 (ja) | 冗長回路装置 | |
| WO2022130980A1 (ja) | 電子装置およびその製造方法 | |
| JP6295354B2 (ja) | 電子制御装置 | |
| JP7406301B2 (ja) | 電子制御装置 | |
| JP7152971B2 (ja) | 電子回路装置 | |
| WO2023095386A1 (ja) | 電子装置 | |
| WO2019230066A1 (ja) | 回転機器 | |
| JP7215322B2 (ja) | 電子装置 | |
| WO2023127380A1 (ja) | 電子制御装置 | |
| JP2023116854A (ja) | 電子装置 | |
| JP2012161112A (ja) | 電動モータユニット | |
| JP2023011102A (ja) | 電子装置 | |
| JP2002300791A (ja) | 積層電気−機械エネルギー変換素子 | |
| JP2002353530A (ja) | 積層電気−機械エネルギー変換素子及びその製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21906343 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022569841 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21906343 Country of ref document: EP Kind code of ref document: A1 |