WO2021054436A1 - ショベル - Google Patents
ショベル Download PDFInfo
- Publication number
- WO2021054436A1 WO2021054436A1 PCT/JP2020/035425 JP2020035425W WO2021054436A1 WO 2021054436 A1 WO2021054436 A1 WO 2021054436A1 JP 2020035425 W JP2020035425 W JP 2020035425W WO 2021054436 A1 WO2021054436 A1 WO 2021054436A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- bucket
- controller
- control
- boom
- control valve
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images
























Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/435—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like
- E02F3/439—Automatic repositioning of the implement, e.g. automatic dumping, auto-return
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
- E02F3/32—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom working downwardly and towards the machine, e.g. with backhoes
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/425—Drive systems for dipper-arms, backhoes or the like
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/435—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/435—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like
- E02F3/437—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like providing automatic sequences of movements, e.g. linear excavation, keeping dipper angle constant
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/08—Superstructures; Supports for superstructures
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/16—Cabins, platforms, or the like, for drivers
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/205—Remotely operated machines, e.g. unmanned vehicles
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2264—Arrangements or adaptations of elements for hydraulic drives
- E02F9/2267—Valves or distributors
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2292—Systems with two or more pumps
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/261—Surveying the work-site to be treated
- E02F9/262—Surveying the work-site to be treated with follow-up actions to control the work tool, e.g. controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/264—Sensors and their calibration for indicating the position of the work tool
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/40—Special vehicles
- B60Y2200/41—Construction vehicles, e.g. graders, excavators
- B60Y2200/412—Excavators
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/264—Sensors and their calibration for indicating the position of the work tool
- E02F9/265—Sensors and their calibration for indicating the position of the work tool with follow-up actions (e.g. control signals sent to actuate the work tool)
Definitions
- an excavator capable of autonomously executing the excavation operation is provided.
- the object detection device 70 may be configured to detect a predetermined object in a predetermined area set around the excavator 100. That is, the object detection device 70 may be configured so that the type of the object can be identified. For example, the object detection device 70 may be configured to distinguish between a person and a non-human object. The object detection device 70 may be configured to calculate the distance from the object detection device 70 or the excavator 100 to the recognized object.
- the image pickup device 80 may be used as an object detection device 70.
- the object detection device 70 may be omitted.
- the body tilt sensor S4 is configured to detect the tilt of the upper swing body 3 with respect to a predetermined plane.
- the airframe tilt sensor S4 is an acceleration sensor that detects the tilt angle around the front-rear axis and the tilt angle around the left-right axis of the upper swing body 3 with respect to the virtual horizontal plane.
- the front-rear axis and the left-right axis of the upper swivel body 3 pass, for example, the excavator center point which is one point on the swivel axis of the excavator 100 orthogonal to each other.
- the pilot pump 15 is configured to supply hydraulic oil to the flood control device including the operating device 26 via the pilot line.
- the pilot pump 15 is a fixed-capacity hydraulic pump.
- the pilot pump 15 may be omitted.
- the function carried out by the pilot pump 15 may be realized by the main pump 14. That is, the main pump 14 has a function of supplying the hydraulic oil to the operating device 26 and the like after reducing the pressure of the hydraulic oil by a throttle or the like, in addition to the function of supplying the hydraulic oil to the control valve unit 17. May be good.
- the controller 30 can operate the hydraulic actuator corresponding to the specific operating device 26 even when the specific operating device 26 is not operated. Further, the controller 30 can forcibly stop the operation of the hydraulic actuator corresponding to the specific operating device 26 even when the operation for the specific operating device 26 is being performed.
- the controller 30 can use the pilot port on the closing side of the control valve 176 (the left side pilot port of the control valve 176L and the control valve, if necessary, even when the arm closing operation is performed by the operator.
- the pilot pressure acting on the right side pilot port of the 176R) can be reduced to forcibly stop the closing operation of the arm 5. The same applies to the case where the opening operation of the arm 5 is forcibly stopped while the arm opening operation is being performed by the operator.
- the controller 30 controls the proportional valve 31AR as necessary even when the arm closing operation is performed by the operator, and is on the opposite side of the pilot port on the closing side of the control valve 176.
- the arm The closing operation of 5 may be forcibly stopped.
- the proportional valve 33AL may be omitted. The same applies to the case where the opening operation of the arm 5 is forcibly stopped when the arm opening operation is performed by the operator.
- the proportional valve 31BL operates in response to a current command output by the controller 30. Then, the proportional valve 31BL adjusts the pilot pressure by the hydraulic oil introduced from the pilot pump 15 to the left pilot port of the control valve 173 via the proportional valve 31BL and the shuttle valve 32BL.
- the proportional valve 31BR operates in response to a current command output by the controller 30. Then, the proportional valve 31BR adjusts the pilot pressure by the hydraulic oil introduced from the pilot pump 15 to the right pilot port of the control valve 173 via the proportional valve 31BR and the shuttle valve 32BR.
- the proportional valve 31BL and the proportional valve 31BR can adjust the pilot pressure so that the control valve 173 can be stopped at an arbitrary valve position.
- the operating pressure sensor 29RB detects the content of the operator's operation of the right operating lever 26R in the left-right direction in the form of pressure, and outputs the detected value to the controller 30.
- the autonomous control unit 30B is configured to operate the excavator 100 autonomously.
- the autonomous control unit 30B is configured to move a predetermined portion of the excavator 100 along a target trajectory generated by the trajectory generation unit 30A when a predetermined start condition is satisfied.
- the autonomous control unit 30B autonomously controls the excavator 100 so that a predetermined portion of the excavator 100 moves along a target trajectory when the operating device 26 is operated while the switch NS is pressed.
- the autonomous control unit 30B has an excavation attachment AT so that the toe of the bucket 6 moves along the target trajectory when the left operating lever 26L is operated in the arm opening direction while the switch NS is pressed. To operate autonomously.
- FIGS. 5 and 6 are block diagrams of the autonomous control function.
- the target trajectory is typically calculated before the release operation is started and is not changed until the release operation is completed. However, the target trajectory may be changed during the earth discharge operation. For example, the target trajectory may be adjusted lower if the height of the newly formed load is greater than the desired height. That is, the target trajectory is typically controlled by open loop control, but may be feedback controlled according to the height of the newly formed load.
- the height of the newly formed load is calculated based on, for example, the output of at least one of the object detection device 70 and the image pickup device 80.
- the bucket control mechanism 31D is configured so that a pilot pressure corresponding to a control current corresponding to a bucket cylinder pilot pressure command can be applied to a control valve 174 as a bucket control valve.
- the bucket control mechanism 31D may be, for example, the proportional valve 31DL and the proportional valve 31DR in FIG. 3D.
- the swivel control mechanism 31B is configured so that a pilot pressure corresponding to a control current corresponding to a swivel hydraulic motor pilot pressure command can be applied to a control valve 173 as a swivel control valve.
- the swivel control mechanism 31B may be, for example, the proportional valve 31BL and the proportional valve 31BR in FIG. 3B.
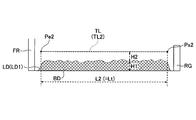
- the height H2 is an example of the height Ht, and is calculated based on, for example, the volume of the excavated object taken into the bucket 6 immediately before the second excavation operation is performed. Specifically, the height H2 is the volume of a rectangular parallelepiped represented by the product of the length Lt (L2), the height Ht (H2), and the width Wt, and the bucket immediately before the second excavation operation is performed. It is calculated so as to be equal to the volume of the object to be excavated taken in 6.
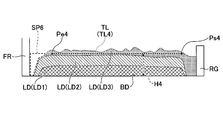
- the controller 30 also generates the target trajectory TL related to the third and subsequent earth discharge operations in the same manner. Specifically, in the controller 30, the total weight of the weight of the excavated object taken into the current bucket 6 and the weight of the load LD already loaded on the loading platform BD of the dump truck DT is the total weight of the dump truck DT. If it is less than the maximum load capacity, the target track TL for the next earth discharge operation is generated. On the other hand, when the total weight exceeds the maximum load capacity of the dump truck DT, the controller 30 does not calculate the target trajectory for the next earth discharge operation. That is, the controller 30 does not execute autonomous control regarding the next earth discharge operation.
- the controller 30 autonomously operates the excavation attachment AT so that the toes of the bucket 6 move along the target trajectory TL3 calculated in this way. Further, the controller 30 executes the bucket opening control in accordance with the movement of the toes of the bucket 6 along the target trajectory TL3.
- the bucket swing control is a control in which a part of the excavated object taken into the bucket 6 is dropped into the space SP1 and the space SP1 is filled with the excavated object.
- the controller 30 may be configured to control the bucket angle ⁇ 3 based on the shape of the load LD loaded on the loading platform BD of the dump truck DT. With this configuration, the controller 30 can further make the height of the load LD loaded on the loading platform BD of the dump truck DT more uniform.
- the target trajectory TL in the boom raising turning operation section is set between the boom raising turning end position (for example, point Pa in FIG. 7A) set above the excavation start point Ps1 or the loading platform BD and the excavation end position.
- the target track TL in the boom raising turning operation section may include the approach track TLa when it is set between the excavation end position and the excavation start point Ps1.
- the functional block FK is configured to calculate the target excavation volume.
- the functional block FK calculates the target excavation volume based on the target excavation weight output by the functional block FJ and the soil quality information input via the input device 43.
- the input device 43 is configured so that the operator can input various information to the controller 30.
- the input device 43 is, for example, at least one such as a touch panel, a microphone, a knob switch, and a membrane switch installed in the cabin 10.
- the soil quality information is, for example, information on the density or hardness of the excavated object.
- the soil information may be information stored in advance in the non-volatile storage device.
- the functional block FK calculates the target excavation volume based on, for example, the target excavation weight and the density of the object to be excavated.
- the functional block F1 is configured to generate a target trajectory.
- the functional block F1 has information on soil discharge input via the input device 43, the shape of the loading platform of the dump truck DT measured by the functional block FA, and the load calculated by the functional block FB. Based on the height, the trajectory that the tip of the bucket 6 should follow during the soil discharge operation is generated as the target trajectory.
- the information on the release is, for example, information on a preset release start point and release end point.
- Information on the release start point includes the distance between the release start point and the rear gate of the dump truck DT, and information on the release end point is the distance between the release end point and the front panel of the dump truck DT. including.
- the bird's-eye view image is typically an image showing the state of the surroundings of the excavator 100 when viewed from a virtual viewpoint directly above.
- the functional block F1 may display an image related to the target trajectory on the display device D1 so as to be adjacent to at least one of the rearward monitoring image and the surrounding monitoring image, for example.
- the functional block F5 is configured to limit the command value related to the speed of the toe.
- the functional block F5 has a toe and a predetermined object such as a dump truck DT based on the current toe position calculated by the functional block F2 and the image captured by the image pickup device 80 as the surrounding monitoring device. If it is determined that the distance between them is less than a predetermined value, the command value related to the speed of the toe is limited by a predetermined upper limit value. In this way, the controller 30 slows down the speed of the toe when it approaches a predetermined object.
- the functional block F5 may be configured to change the upper limit value based on the weight of the excavated object taken into the bucket 6.
- the functional block FM is configured to determine the start of work.
- the function block FM receives the start command from the communication device T1 when the function block FM receives the start command from the communication device T1, it is determined that the start of the work is instructed, and the function block FM is configured to output the start command to the function block FN. ..
- the functional block FM receives a start command from the communication device T1 and can determine that there is no object around the excavator 100 based on the output of the imaging device 80 as the ambient monitoring device, the functional block FM refers to the functional block FN. It may be configured to output a start command.
- the functional block FM outputs a start command to the functional block FN
- the functional block FM outputs a command to an electromagnetic on-off valve arranged on a pilot line connecting the pilot pump 15 and the control valve unit 17, and opens the pilot line. You may let me.
- the functional block FO is configured to set the operating conditions of the excavator 100.
- the function block FO receives a start command from the function block FN, the operation such as the earth discharge speed when the earth discharge operation by autonomous control is performed, the bucket angle ⁇ 3 at the start of earth discharge, and the like. It is configured to set conditions.
- the functional block FO is configured to output a start command to the functional block FP after setting the operating conditions.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Paleontology (AREA)
- Operation Control Of Excavators (AREA)
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021546973A JP7721442B2 (ja) | 2019-09-18 | 2020-09-18 | ショベル、ショベルの制御装置、及びショベルの管理システム |
| CN202080052770.4A CN114174596B (zh) | 2019-09-18 | 2020-09-18 | 挖土机 |
| EP20865679.3A EP4033034A4 (en) | 2019-09-18 | 2020-09-18 | Excavator |
| KR1020227001778A KR102905630B1 (ko) | 2019-09-18 | 2020-09-18 | 쇼벨 |
| US17/654,871 US12338601B2 (en) | 2019-09-18 | 2022-03-15 | Shovel |
| JP2025068849A JP2025105693A (ja) | 2019-09-18 | 2025-04-18 | ショベル |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019169178 | 2019-09-18 | ||
| JP2019-169178 | 2019-09-18 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/654,871 Continuation US12338601B2 (en) | 2019-09-18 | 2022-03-15 | Shovel |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021054436A1 true WO2021054436A1 (ja) | 2021-03-25 |
Family
ID=74884320
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/035425 Ceased WO2021054436A1 (ja) | 2019-09-18 | 2020-09-18 | ショベル |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US12338601B2 (https=) |
| EP (1) | EP4033034A4 (https=) |
| JP (2) | JP7721442B2 (https=) |
| KR (1) | KR102905630B1 (https=) |
| CN (1) | CN114174596B (https=) |
| WO (1) | WO2021054436A1 (https=) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022160159A (ja) * | 2021-04-06 | 2022-10-19 | コベルコ建機株式会社 | 作業ポイント決定システム |
| WO2023079869A1 (ja) | 2021-11-02 | 2023-05-11 | コベルコ建機株式会社 | 積込物排出システム |
| WO2023090121A1 (ja) * | 2021-11-17 | 2023-05-25 | コベルコ建機株式会社 | 作業システム |
| JP2023074391A (ja) * | 2021-11-17 | 2023-05-29 | コベルコ建機株式会社 | 作業システム |
| WO2023149307A1 (ja) * | 2022-02-07 | 2023-08-10 | コベルコ建機株式会社 | 作業機械のための自動運転システム、作業機械、および自動運転プログラム |
| JP2024001736A (ja) * | 2022-06-22 | 2024-01-10 | 住友重機械工業株式会社 | ショベル |
| WO2024053443A1 (ja) * | 2022-09-06 | 2024-03-14 | 株式会社小松製作所 | 作業機械、作業機械を含むシステム、および作業機械の制御方法 |
| WO2024075639A1 (ja) * | 2022-10-05 | 2024-04-11 | 日立建機株式会社 | 作業機械 |
| JP2024100930A (ja) * | 2020-09-29 | 2024-07-26 | コベルコ建機株式会社 | 自動均しシステム |
| WO2024247570A1 (ja) | 2023-05-31 | 2024-12-05 | コベルコ建機株式会社 | 作業機械 |
| WO2025009157A1 (ja) * | 2023-07-06 | 2025-01-09 | 日本電気株式会社 | 積載位置決定システム、積載位置決定装置および積載位置決定方法 |
| WO2025204941A1 (ja) * | 2024-03-28 | 2025-10-02 | 株式会社小松製作所 | システム、作業機械、および制御方法 |
| WO2026038479A1 (ja) * | 2024-08-14 | 2026-02-19 | 日本電気株式会社 | 制御装置、制御方法、及び制御プログラム |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CL2012000933A1 (es) * | 2011-04-14 | 2014-07-25 | Harnischfeger Tech Inc | Un metodo y una pala de cable para la generacion de un trayecto ideal, comprende: un motor de oscilacion, un motor de izaje, un motor de avance, un cucharon para excavar y vaciar materiales y, posicionar la pala por medio de la operacion del motor de izaje, el motor de avance y el motor de oscilacion y; un controlador que incluye un modulo generador de un trayecto ideal. |
| JP7306201B2 (ja) * | 2019-09-30 | 2023-07-11 | コベルコ建機株式会社 | 作業機械 |
| US11961253B2 (en) * | 2020-10-26 | 2024-04-16 | Caterpillar Sarl | Determining material volume and density based on sensor data |
| US20220403622A1 (en) * | 2021-06-22 | 2022-12-22 | Cnh Industrial America Llc | System and method for automatically controlling a work vehicle during the performance of an earthmoving operation |
| JP7569351B2 (ja) * | 2022-03-31 | 2024-10-17 | 日立建機株式会社 | 作業機械 |
| JP2024065876A (ja) * | 2022-10-31 | 2024-05-15 | 住友重機械工業株式会社 | ショベル、及びショベル制御システム |
| CN115674262B (zh) * | 2022-11-14 | 2025-03-07 | 网易灵动(杭州)科技有限公司 | 挖掘机控制方法、装置、设备及存储介质 |
| US12473709B2 (en) * | 2023-03-09 | 2025-11-18 | Kubota Corporation | Working machine |
| WO2025127202A1 (ko) * | 2023-12-14 | 2025-06-19 | 볼보 컨스트럭션 이큅먼트 에이비 | 굴착기를 제어하는 방법 및 시스템 |
| WO2025127201A1 (ko) * | 2023-12-14 | 2025-06-19 | 볼보 컨스트럭션 이큅먼트 에이비 | 굴착기를 제어하는 방법 및 시스템 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011514456A (ja) | 2008-02-29 | 2011-05-06 | キャタピラー インコーポレイテッド | 半自律的掘削制御システム |
| JP2016089559A (ja) * | 2014-11-10 | 2016-05-23 | 日立建機株式会社 | 建設機械 |
| JP2016089388A (ja) * | 2014-10-30 | 2016-05-23 | 日立建機株式会社 | 作業支援画像生成装置、及びそれを備えた作業機械の遠隔操縦システム |
| WO2017115809A1 (ja) * | 2015-12-28 | 2017-07-06 | 住友建機株式会社 | ショベル |
| WO2019151335A1 (ja) * | 2018-01-30 | 2019-08-08 | 住友建機株式会社 | ショベル及びショベルの管理システム |
| JP2019169178A (ja) | 2014-06-30 | 2019-10-03 | キヤノンマーケティングジャパン株式会社 | 情報処理システムと、その処理方法及びプログラム |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2889388B2 (ja) * | 1991-03-28 | 1999-05-10 | ソニー株式会社 | はんだ付け装置 |
| JPH08177071A (ja) * | 1994-12-26 | 1996-07-09 | Hakubi Kensetsu Kk | 油圧ショベル用のバケット |
| JPH1046632A (ja) * | 1996-08-02 | 1998-02-17 | Hitachi Constr Mach Co Ltd | ショベルローダ |
| JPH1088625A (ja) | 1996-09-13 | 1998-04-07 | Komatsu Ltd | 自動掘削機、自動掘削方法および自動積み込み方法 |
| JPH10212740A (ja) * | 1997-01-30 | 1998-08-11 | Komatsu Ltd | 油圧ショベルの自動掘削方法 |
| DE19858401A1 (de) * | 1997-12-19 | 1999-09-09 | Univ Carnegie Mellon | Schematisierte Ladestrategie unter Verwendung von Sicht-Feedback |
| JPH11286967A (ja) | 1998-04-01 | 1999-10-19 | Hitachi Constr Mach Co Ltd | 自動運転建設機械 |
| JP2000257106A (ja) * | 1999-03-10 | 2000-09-19 | Nippon Hodo Co Ltd | 材料供給方法およびその装置 |
| JP2004244138A (ja) * | 2003-02-12 | 2004-09-02 | Kumagai Gumi Co Ltd | 土砂均し装置 |
| US8903689B2 (en) * | 2009-06-25 | 2014-12-02 | Commonwealth Scientific And Industrial Research Organisation | Autonomous loading |
| US8527158B2 (en) * | 2010-11-18 | 2013-09-03 | Caterpillar Inc. | Control system for a machine |
| FR2971492B1 (fr) * | 2011-02-10 | 2013-10-11 | Joseph Daumer | Benne de compactage pour la collecte d'une charge du type dechets menagers et procede de transfert de la charge d'une telle benne vers un conteneur |
| JP2014148891A (ja) * | 2014-04-17 | 2014-08-21 | Komatsu Ltd | 作業機械 |
| US20180171582A1 (en) | 2015-07-15 | 2018-06-21 | Hitachi, Ltd. | Working Machine Operation System and Working Machine with Working Machine Operation System |
| US20170073935A1 (en) | 2015-09-11 | 2017-03-16 | Caterpillar Inc. | Control System for a Rotating Machine |
| WO2017184037A1 (en) * | 2016-04-19 | 2017-10-26 | Volvo Construction Equipment Ab | Control unit for dumping of material |
| US10815640B2 (en) * | 2016-08-31 | 2020-10-27 | Komatsu Ltd. | Wheel loader and method for controlling wheel loader |
| CN107250461B (zh) * | 2016-10-28 | 2018-10-12 | 株式会社小松制作所 | 装载机械的控制系统及装载机械的控制方法 |
| US10570582B2 (en) * | 2016-11-23 | 2020-02-25 | Caterpillar Inc. | System and method for operating a material-handling machine |
| PL3401447T3 (pl) * | 2017-05-12 | 2021-08-02 | Idea - Keksi Oy | Maszyna przemieszczająca się z wykorzystaniem gąsienic łańcuchowych |
| JP6974217B2 (ja) * | 2018-02-28 | 2021-12-01 | 株式会社小松製作所 | 施工管理装置 |
| JP7088691B2 (ja) | 2018-02-28 | 2022-06-21 | 株式会社小松製作所 | 積込機械の制御装置、制御方法および遠隔操作システム |
| JP7311250B2 (ja) * | 2018-08-31 | 2023-07-19 | 株式会社小松製作所 | 作業機械の運搬物特定装置、作業機械、作業機械の運搬物特定方法、補完モデルの生産方法、および学習用データセット |
| JP7166108B2 (ja) | 2018-08-31 | 2022-11-07 | 株式会社小松製作所 | 画像処理システム、表示装置、画像処理方法、学習済みモデルの生成方法、および学習用データセット |
| CN109902857B (zh) * | 2019-01-22 | 2020-11-10 | 江苏徐工工程机械研究院有限公司 | 一种运输车辆装载点自动规划方法及系统 |
-
2020
- 2020-09-18 CN CN202080052770.4A patent/CN114174596B/zh active Active
- 2020-09-18 EP EP20865679.3A patent/EP4033034A4/en active Pending
- 2020-09-18 JP JP2021546973A patent/JP7721442B2/ja active Active
- 2020-09-18 WO PCT/JP2020/035425 patent/WO2021054436A1/ja not_active Ceased
- 2020-09-18 KR KR1020227001778A patent/KR102905630B1/ko active Active
-
2022
- 2022-03-15 US US17/654,871 patent/US12338601B2/en active Active
-
2025
- 2025-04-18 JP JP2025068849A patent/JP2025105693A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011514456A (ja) | 2008-02-29 | 2011-05-06 | キャタピラー インコーポレイテッド | 半自律的掘削制御システム |
| JP2019169178A (ja) | 2014-06-30 | 2019-10-03 | キヤノンマーケティングジャパン株式会社 | 情報処理システムと、その処理方法及びプログラム |
| JP2016089388A (ja) * | 2014-10-30 | 2016-05-23 | 日立建機株式会社 | 作業支援画像生成装置、及びそれを備えた作業機械の遠隔操縦システム |
| JP2016089559A (ja) * | 2014-11-10 | 2016-05-23 | 日立建機株式会社 | 建設機械 |
| WO2017115809A1 (ja) * | 2015-12-28 | 2017-07-06 | 住友建機株式会社 | ショベル |
| WO2019151335A1 (ja) * | 2018-01-30 | 2019-08-08 | 住友建機株式会社 | ショベル及びショベルの管理システム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4033034A4 |
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024100930A (ja) * | 2020-09-29 | 2024-07-26 | コベルコ建機株式会社 | 自動均しシステム |
| JP2022160159A (ja) * | 2021-04-06 | 2022-10-19 | コベルコ建機株式会社 | 作業ポイント決定システム |
| JP7673470B2 (ja) | 2021-04-06 | 2025-05-09 | コベルコ建機株式会社 | 作業ポイント決定システム |
| EP4407102A4 (en) * | 2021-11-02 | 2025-01-08 | Kobelco Construction Machinery Co., Ltd. | LOAD UNLOADING SYSTEM |
| WO2023079869A1 (ja) | 2021-11-02 | 2023-05-11 | コベルコ建機株式会社 | 積込物排出システム |
| JP2023068409A (ja) * | 2021-11-02 | 2023-05-17 | コベルコ建機株式会社 | 積込物排出システム |
| US12606981B2 (en) | 2021-11-02 | 2026-04-21 | Kobelco Construction Machinery Co., Ltd. | Load discharge system |
| WO2023090121A1 (ja) * | 2021-11-17 | 2023-05-25 | コベルコ建機株式会社 | 作業システム |
| JP2023074391A (ja) * | 2021-11-17 | 2023-05-29 | コベルコ建機株式会社 | 作業システム |
| JP7786145B2 (ja) | 2021-11-17 | 2025-12-16 | コベルコ建機株式会社 | 作業システム |
| EP4421244A4 (en) * | 2021-11-17 | 2025-03-12 | Kobelco Construction Machinery Co., Ltd. | WORK SYSTEM |
| EP4459047A4 (en) * | 2022-02-07 | 2025-05-21 | Kobelco Construction Machinery Co., Ltd. | AUTOMATIC DRIVE SYSTEM FOR CONSTRUCTION MACHINERY, CONSTRUCTION MACHINERY AND AUTOMATIC DRIVE PROGRAM |
| WO2023149307A1 (ja) * | 2022-02-07 | 2023-08-10 | コベルコ建機株式会社 | 作業機械のための自動運転システム、作業機械、および自動運転プログラム |
| JP2024001736A (ja) * | 2022-06-22 | 2024-01-10 | 住友重機械工業株式会社 | ショベル |
| WO2024053443A1 (ja) * | 2022-09-06 | 2024-03-14 | 株式会社小松製作所 | 作業機械、作業機械を含むシステム、および作業機械の制御方法 |
| WO2024075639A1 (ja) * | 2022-10-05 | 2024-04-11 | 日立建機株式会社 | 作業機械 |
| WO2024247570A1 (ja) | 2023-05-31 | 2024-12-05 | コベルコ建機株式会社 | 作業機械 |
| EP4667664A1 (en) | 2023-05-31 | 2025-12-24 | Kobelco Construction Machinery Co., Ltd. | Work machine |
| WO2025009157A1 (ja) * | 2023-07-06 | 2025-01-09 | 日本電気株式会社 | 積載位置決定システム、積載位置決定装置および積載位置決定方法 |
| WO2025204941A1 (ja) * | 2024-03-28 | 2025-10-02 | 株式会社小松製作所 | システム、作業機械、および制御方法 |
| WO2026038479A1 (ja) * | 2024-08-14 | 2026-02-19 | 日本電気株式会社 | 制御装置、制御方法、及び制御プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4033034A4 (en) | 2022-11-23 |
| JP7721442B2 (ja) | 2025-08-12 |
| US12338601B2 (en) | 2025-06-24 |
| CN114174596A (zh) | 2022-03-11 |
| JPWO2021054436A1 (https=) | 2021-03-25 |
| US20220195690A1 (en) | 2022-06-23 |
| KR102905630B1 (ko) | 2025-12-29 |
| CN114174596B (zh) | 2024-03-08 |
| JP2025105693A (ja) | 2025-07-10 |
| KR20220062261A (ko) | 2022-05-16 |
| EP4033034A1 (en) | 2022-07-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7721442B2 (ja) | ショベル、ショベルの制御装置、及びショベルの管理システム | |
| JP7227222B2 (ja) | ショベル | |
| JP7383599B2 (ja) | ショベル | |
| JP7301875B2 (ja) | ショベル、ショベルの制御装置 | |
| US12460383B2 (en) | Work machine and information processing apparatus | |
| JP7307051B2 (ja) | ショベル | |
| JP7658661B2 (ja) | ショベル及びショベルの管理システム | |
| CN113039327B (zh) | 挖土机、挖土机的控制装置 | |
| CN113167051A (zh) | 挖土机、挖土机的控制装置 | |
| WO2021241526A1 (ja) | ショベル及びショベル用のシステム | |
| CN113677855A (zh) | 挖土机及挖土机的控制装置 | |
| JP2021188432A (ja) | ショベル | |
| WO2022196776A1 (ja) | ショベル | |
| EP4317596A1 (en) | Excavator and excavator control device | |
| JP2024099211A (ja) | ショベル | |
| JP2024134943A (ja) | ショベル | |
| JP2024001736A (ja) | ショベル | |
| JP2024155512A (ja) | 作業機械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20865679 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021546973 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2020865679 Country of ref document: EP Effective date: 20220419 |