WO2020179386A1 - 移動体制御方法、移動体制御システム、及びプログラム - Google Patents
移動体制御方法、移動体制御システム、及びプログラム Download PDFInfo
- Publication number
- WO2020179386A1 WO2020179386A1 PCT/JP2020/005380 JP2020005380W WO2020179386A1 WO 2020179386 A1 WO2020179386 A1 WO 2020179386A1 JP 2020005380 W JP2020005380 W JP 2020005380W WO 2020179386 A1 WO2020179386 A1 WO 2020179386A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- moving body
- moving
- control
- control system
- transport device
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 545
- 230000008569 process Effects 0.000 claims abstract description 433
- 230000033001 locomotion Effects 0.000 claims abstract description 129
- 230000032258 transport Effects 0.000 claims description 201
- 238000001514 detection method Methods 0.000 claims description 118
- 238000012545 processing Methods 0.000 claims description 42
- 230000008901 benefit Effects 0.000 description 56
- 238000012546 transfer Methods 0.000 description 32
- 238000012544 monitoring process Methods 0.000 description 29
- 230000006854 communication Effects 0.000 description 19
- 238000004891 communication Methods 0.000 description 19
- 230000003028 elevating effect Effects 0.000 description 19
- 230000007246 mechanism Effects 0.000 description 14
- 230000006870 function Effects 0.000 description 12
- 230000000052 comparative effect Effects 0.000 description 11
- 238000003860 storage Methods 0.000 description 11
- 230000015654 memory Effects 0.000 description 10
- 230000006399 behavior Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 230000010354 integration Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 230000001965 increasing effect Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 239000000047 product Substances 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 230000007175 bidirectional communication Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000004886 process control Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000011265 semifinished product Substances 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/0755—Position control; Position detectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/063—Automatically guided
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0088—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots characterized by the autonomous decision making process, e.g. artificial intelligence, predefined behaviours
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0238—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/227—Handing over between remote control and on-board control; Handing over between remote control arrangements
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/247—Arrangements for determining position or orientation using signals provided by artificial sources external to the vehicle, e.g. navigation beacons
- G05D1/249—Arrangements for determining position or orientation using signals provided by artificial sources external to the vehicle, e.g. navigation beacons from positioning sensors located off-board the vehicle, e.g. from cameras
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
Definitions
- the present disclosure generally relates to a moving body control method, a moving body control system, and a program, and more specifically, to a moving body control method and a moving body control system for controlling a moving body equipped with a detection unit that detects an object. , And about the program.
- Patent Document 1 discloses a pallet truck (moving body) that conveys a pallet (object).
- a fork is attached to the rear side (fork side) of the truck body so as to be able to move up and down. Further, in this pallet truck, small wheels are attached to the tip of the fork.
- the present disclosure has been made in view of the above reasons, and an object of the present disclosure is to provide a moving body control method, a moving body control system, and a program that facilitate moving a moving body smoothly while holding an object.
- the mobile control method includes a determination process and a control process.
- the determination process determines whether or not a moving body that is in the state of carrying an object is protruding from a moving route that allows the moving body including the object to pass through. It is a process.
- the control process is a process of controlling the moving body based on the result of the determination process.
- the moving body control system includes a moving body that conveys an object and a control system that controls the moving body.
- the control system includes a determination unit and a control unit.
- the determination unit determines whether or not a moving body in a state of transporting the target object protrudes from a moving route in which the moving body including the target object is allowed to pass. To do.
- the control unit controls the moving body based on the result of the determination unit.
- a program according to one aspect of the present disclosure is a program for causing one or more processors to execute the above-described mobile body control method.
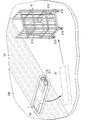
- FIG. 1 is a perspective view showing an appearance of a moving body and an object in a moving body control system according to an embodiment of the present disclosure.
- FIG. 2 is a perspective view showing the appearance of a moving body used in the above-mentioned moving body control system.
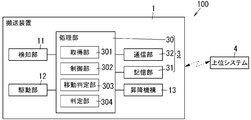
- FIG. 3 is a block diagram of the same mobile control system.
- FIG. 4 is a flowchart showing a first operation example of the above-mentioned mobile control system.
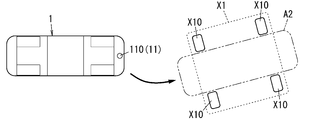
- 5A and 5B are schematic plan views showing a moving body and an object in the first operation example of the moving body control system of the above.
- FIG. 6 is a schematic plan view showing a moving body and an object in the first operation example of the moving body control system of the above.
- FIG. 7 is a perspective view showing the appearance of the object when the same object moves.
- FIG. 8 is a flowchart showing a second operation example of the above-mentioned mobile control system.
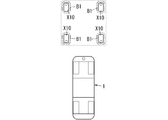
- FIG. 9 is a schematic plan view showing the feature portions of the moving body and the object in the second operation example of the moving body control system of the above.
- FIG. 10 is a schematic plan view showing the feature portions of the moving body and the object in the second operation example of the moving body control system of the above.
- FIG. 11 is a schematic plan view showing the feature portions of the moving body and the object in the second operation example of the moving body control system of the above.
- FIG. 12 is a schematic plan view showing the feature portions of the moving body and the object in the second operation example of the moving body control system of the above.
- FIG. 9 is a schematic plan view showing the feature portions of the moving body and the object in the second operation example of the moving body control system of the above.
- FIG. 10 is a schematic plan view showing the feature portions of the moving body and the object in the second operation example of the moving body control system of the above.
- FIG. 11
- FIG. 13 is a schematic plan view showing the feature portions of the moving body and the object in the second operation example of the moving body control system of the above.
- 14A to 14D are schematic plan views showing a moving body and an object in the second operation example of the same moving body control system, respectively.
- 15A to 15C are schematic plan views showing a moving body and an object in the second operation example of the same moving body control system, respectively.
- FIG. 16 is a schematic plan view showing a moving body and an object in an operation example of the moving body control system of the comparative example.
- FIG. 17 is a flowchart showing a third operation example of the mobile unit control system according to the embodiment of the present disclosure.
- 18A and 18B are schematic plan views showing a moving body and an object in the third operation example of the same moving body control system, respectively.
- the moving body control method is a method for moving the moving body 1 having the detection unit 11 to the object X1, as shown in FIG.
- This moving body control method is realized by the moving body control system 100, for example.
- the mobile body control system 100 includes a mobile body 1 and a control system 3.
- the control system 3 is a system that controls the moving body 1.
- the moving body 1 is a device that moves on the moving surface 200 by one or more wheels (driving wheels) 23 (see FIG. 2).
- the moving body 1 is a device for transporting the object X1.
- the "moving body” is referred to as a "transport device”.
- the transport device 1 is installed in facilities such as a distribution center (including a distribution center), a factory, an office, a store, a school, and a hospital.
- the moving surface 200 is a surface on which the carrier device 1 moves, and when the carrier device 1 moves inside the facility, the floor surface of the facility becomes the moving surface 200, and when the carrier device 1 moves outdoors. The ground or the like becomes the moving surface 200.
- the case where the transport device 1 is introduced into the distribution center will be described below.
- the carrier device 1 includes a main body 2 and a detector 11.
- the main body 2 has wheels 23, and is moved on the moving surface 200 by the wheels 23.
- the main body 2 can move autonomously.
- the detection unit 11 is provided in the main body unit 2 and detects the situation around the main body unit 2.
- the “surroundings of the main body” in the present disclosure correspond to a range that can be detected by the detection unit 11. That is, the range indicated by “around the main body” depends on the performance of the detection unit 11.
- the moving body control method for moving the moving body 1 of this kind to the object X1 it is desirable to move the moving body 1 to the object X1 smoothly. Further, in the case where the moving body 1 is the carrying device 1, in the moving body control method of moving the carrying device (moving body) 1 that carries the object X1 of this kind, the moving body 1 is held in the state of holding the object X1. It is desirable to move smoothly.
- the mobile body control method according to the present embodiment is trying to solve the above-mentioned problems by the following three methods.
- the moving body control method has an acquisition process and a control process (second control process).
- the acquisition process is a process of acquiring the detection result of the detection unit 11 including the distance information related to the distance between the moving body 1 and the object X1.
- the control process is a process of controlling the moving body 1 when a part of the characteristic parts X10 for estimating the position and orientation of the object X1 is recognized based on the detection result.
- the characteristic portions X10 can be easily recognized when a part of the characteristic portions X10 is recognized. It is possible to take some measures such as moving the moving body 1 to a position. That is, this method has an advantage that the moving body 1 can be easily moved to the object X1 smoothly.
- the mobile body control method has a movement determination process and a control process (third control process).
- the movement determination process is a process of determining whether or not the target object X1 has moved during the movement of the moving body 1 to the target object X1.
- the control process is a process of controlling the moving body 1 when it is determined by the movement determination process that the object X1 is moving.
- this method as compared with the method of moving the moving body 1 on the initially set trajectory regardless of whether or not the object X1 has moved, when it is determined that the object X1 moves, the trajectory of the moving body 1 It is possible to take some measures such as correction. That is, this method has an advantage that the moving body 1 can be easily moved to the object X1 smoothly.
- the mobile body control method has a determination process and a control process (first control process).
- the determination process the moving body 1 in the state of transporting the object X1 is out of the moving path C1 (see FIG. 16) in which the moving body 1 including the target object X1 is allowed to pass.
- This is a process of determining whether or not to occur.
- the boundary of the movement route C1 may include a boundary virtually set on the moving surface 200 by the host system 4 without a body, and a boundary with a body such as a wall.
- the control process is a process of controlling the moving body 1 based on the result of the determination process.
- this method as compared with the method of moving the moving body 1 without considering the protrusion from the moving path C1, when it is determined that there is a protrusion from the moving path C1, the trajectory of the moving body 1 is corrected, etc. It is possible to take some measures. That is, this method has an advantage that the moving body 1 can be smoothly moved while holding the object X1.
- the stipulation of these directions is not intended to limit the usage mode of the transport device 1.
- the arrows indicating the respective directions in the drawings are shown for the sake of explanation only and do not have substance.
- the arrow extending from the object (for example, the transport device 1 or the target object X1) in the drawing only represents the moving direction of the object, and does not have a substance.
- the mobile body control system 100 includes a control system 3 and at least one carrier device 1, as shown in FIG.
- the mobile body control system 100 includes a plurality of transfer devices 1.
- control system 3 is integrated with the carrier device 1 by being mounted on the carrier device 1. That is, one housing of the carrier device 1 accommodates components for realizing the functions of the carrier device 1 and components of the control system 3.
- the mobile body control system 100 includes a plurality of carrier devices 1, and therefore a plurality of control systems 3 are provided so as to correspond to the carrier device 1. That is, the moving body control system 100 includes a plurality of control systems 3 that correspond one-to-one with the plurality of transfer devices 1.
- a plurality of control systems 3 that correspond one-to-one with the plurality of transfer devices 1.
- the moving body control system 100 further includes a host system 4 that remotely controls the carrier device 1 in addition to the carrier device 1 and the control system 3.
- the host system 4 and the control system 3 are configured to be able to communicate with each other.
- "communicable” means that information can be exchanged directly or indirectly via a network, a relay, or the like by an appropriate communication method such as wire communication or wireless communication. That is, the host system 4 and the control system 3 can exchange information with each other.
- the host system 4 and the control system 3 are capable of bidirectional communication with each other, and send information from the host system 4 to the control system 3 and send information from the control system 3 to the host system 4. Both transmissions are possible.
- the host system 4 remotely controls at least one (a plurality of in the present embodiment) carrier device 1. Specifically, the host system 4 indirectly controls the transport device 1 via the control system 3 by communicating with the control system 3. That is, the host system 4 controls the carrier device 1 by a command (carrying command) transmitted from the outside of the carrier device 1 to the control system 3 mounted on the carrier device 1.
- the host system 4 transmits, for example, a command (transport command) and data such as an electronic map to the control system 3.
- the host system 4 is, for example, a server, and the main configuration is a computer system having one or more processors and memories.
- the functions of the host system 4 are realized by the processor of the computer system executing the program recorded in the memory of the computer system.
- the program may be recorded in a memory, may be provided through an electric communication line such as the Internet, or may be recorded and provided in a non-transitory recording medium such as a memory card.
- the higher-level system 4 estimates at least the current position of the transport device 1 from the detection result of the detection unit 11 of the transport device 1 described later, and moves the transport device C1 to the target node C0 (see FIG. 1) (see FIG. 1). 1) is determined (route planning).
- the host system 4 gives a command to the transfer device 1 via the control system 3 so that the transfer device 1 moves along the movement path C1. As a result, remote control of the transport device 1 is realized.
- the conveying device 1 includes a main body portion 2, a detecting portion 11, a driving portion 12, and a lifting mechanism 13. Further, the carrier device 1 further includes a control system 3 described later. In the present embodiment, the transport device 1 also uses a processing unit that controls the detection unit 11, the driving unit 12, and the lifting mechanism 13 as a processing unit 30 (described later) of the control system 3. Of course, the transport device 1 may have a processing unit for controlling the detection unit 11, the driving unit 12, and the lifting mechanism 13 in addition to the processing unit 30 of the control system 3. The detection unit 11, the drive unit 12, the lifting mechanism 13, and the control system 3 are all mounted on the main body unit 2.
- the carrier device 1 autonomously travels on a flat moving surface 200 such as a floor of a facility.
- the transport device 1 includes a storage battery and operates using the electric energy stored in the storage battery.
- the transport device 1 travels on the moving surface 200 with the object X1 loaded on the main body 2.
- the carrier device 1 can, for example, carry the object X1 placed at a certain place in the facility to another place in the facility.
- the object X1 may include a package X11, a product in a manufacturing factory, a product in the process of manufacturing (semi-finished product), a pallet, a pallet on which the package X11 is placed, or the like. That is, in the present embodiment, the object X1 is a transported object carried by the moving body 1.
- the pallets are, for example, roll box pallets (including cold roll box pallets) or flat pallets. In the following, the object X1 is a roll box pallet on which the load X11 is placed, unless otherwise specified.
- the main body 2 has a rectangular parallelepiped shape that is longer in the front-rear direction than in the left-right direction and has smaller dimensions in the vertical direction than in the left-right direction and the front-rear direction.
- the target object X1 is loaded on the main body part 2 so that the main body part 2 goes under the target object X1 and lifts the target object X1. Therefore, the vertical dimension of the main body 2 is set to be sufficiently smaller than the horizontal dimension of the main body 2 so that the main body 2 fits in the gap formed below the object X1.
- the main body portion 2 has a vehicle body portion 21 and a plurality of lift plates 22.
- the main body 2 is made of metal.
- the main body 2 is not limited to being made of metal, and may be made of resin, for example.
- the vehicle body portion 21 is supported on the moving surface 200 by a plurality (here, two) wheels 23 and a plurality (here, two) auxiliary wheels 24.
- the plurality of wheels 23 are arranged at intervals in the width direction (left-right direction) of the vehicle body portion 21 at the center of the vehicle body portion 21 in the longitudinal direction (front-back direction). Each of the plurality of wheels 23 can rotate individually by receiving a driving force from the driving unit 12. Each wheel 23 is held by the main body portion 2 (vehicle body portion 21) in a state of being rotatable about a rotation shaft R1 extending in the left-right direction.
- the plurality of auxiliary wheels 24 are arranged at a center in the width direction (left-right direction) of the vehicle body portion 21 at intervals in the longitudinal direction (front-rear direction) of the vehicle body portion 21. Each of the plurality of auxiliary wheels 24 can be individually rotated without receiving the driving force from the drive unit 12.
- all of the plurality of wheels 23 are drive wheels driven by the drive unit 12.
- the main body unit 2 can move in all directions. That is, when the plurality of wheels 23 rotate at different angular velocities, they can turn in either the left-right direction, and when they rotate at the same angular velocity, they can travel linearly. Therefore, the main body 2 can perform forward movement, backward movement, and turning in the left-right direction (including a turning turn and a super turning turn). Further, the main body 2 can also be moved so as to draw a curved trajectory (that is, a curve).
- Each of the plurality of elevating plates 22 is arranged above the vehicle body portion 21 so as to cover at least a part of the upper surface of the vehicle body portion 21.
- the plurality of lift plates 22 are provided so as to cover the four corners of the upper surface of the vehicle body portion 21, respectively.
- the upper surface of each lift plate 22 serves as a loading surface on which the target X1 is loaded when the target X1 is transported by the transport device 1.
- the upper surface (loading surface) of each elevating plate 22 has a larger friction coefficient than parts other than the elevating plate 22 due to, for example, being subjected to a slip prevention process. Therefore, the objects X1 loaded on the lift plates 22 are less likely to slip on the lift plates 22.
- each elevating plate 22 can be elevated and lowered with respect to the vehicle body portion 21 by the elevating mechanism 13. Therefore, the object X1 is lifted by each elevating plate 22 by raising each elevating plate 22 in a state where the main body 2 is submerged below the object X1. On the contrary, the object X1 is lowered from each elevating plate 22 by descending each elevating plate 22 while the object X1 is lifted by each elevating plate 22.
- the detection unit 11 detects the position of the main body 2, the behavior of the main body 2, the surrounding conditions of the main body 2, and the like.
- the "behavior” as used in the present disclosure means an operation, a state, and the like. That is, the behavior of the main body portion 2 includes the operating state of the main body portion 2 indicating that the main body portion 2 is moving/stopped, the speed of the main body portion 2 (and the speed change), the acceleration acting on the main body portion 2, and the main body portion 2. Including the posture of.
- the “surrounding situation” in the present disclosure may include the situation of the target object X1 around the main body 2.
- the detection unit 11 includes, for example, sensors such as LiDAR (Light Detection and Ringing), a sonar sensor, and a radar (Radar: Radio Detection and Ringing), and these sensors detect the surrounding situation of the main body 2.
- LiDAR is a sensor that uses light (laser light) to measure the distance to the object X1 based on the light reflected by the object X1.
- the sonar sensor is a sensor that measures the distance to the target object X1 based on the reflected wave from the target object X1 using sound waves such as ultrasonic waves.
- the radar is a sensor that measures the distance to the target object X1 based on the reflected wave from the target object X1 using electromagnetic waves (radio waves) such as microwaves. That is, the detection result of the detection unit 11 (output of the detection unit 11) includes at least distance information related to the distance between the transport device 1 (main body unit 2) and the target object X1.
- the “distance information” referred to in the present disclosure may be information that reflects the distance between the transport device 1 and the object X1, that is, information that changes according to the distance, and the “distance information” between the transport device 1 and the object X1. It is not limited to information that represents the distance itself.
- the detection unit 11 includes, for example, sensors such as a speed sensor, an acceleration sensor, and a gyro sensor, and these sensors detect the behavior of the main body unit 2.
- the detection unit 11 has a sensor 110 that is a 2D-LiDAR (see FIG. 1).
- the sensor 110 is provided in the front portion of the main body portion 2, and is mainly used for detecting the situation in front of the main body portion 2.
- the detection unit 11 measures the rotation speed of the drive wheels.
- the processing unit 30, which will be described later, estimates the position of the main body unit 2 based on information such as the rotational speed of the drive wheel measured by the detection unit 11. That is, in the present embodiment, the position of the main body 2 is estimated mainly by the electronic map acquired in advance, the detection result of the detection unit 11 (sensor 110), and the so-called dead reckoning (DR). To.
- the drive unit 12 directly or indirectly gives a driving force to a drive wheel that is at least a part of the plurality of wheels 23.
- all of the plurality of wheels 23 are driving wheels, so the drive unit 12 applies a driving force to all of the plurality of wheels 23.
- the drive unit 12 is built in the vehicle body unit 21.
- the drive unit 12 includes, for example, an electric motor (motor), and indirectly applies a driving force generated by the electric motor to each wheel 23 via a gear box, a belt, and the like. Further, the driving unit 12 may be configured to directly apply a driving force to each wheel 23, like an in-wheel motor. Based on the control signal input from the processing unit 30, the drive unit 12 drives each of the plurality of wheels 23 in the rotation direction and rotation speed according to the control signal.
- the lifting mechanism 13 is a mechanism that lifts the object X1 by raising each lifting plate 22.
- the lifting mechanism 13 is a holding mechanism that holds the object X1 by lifting the object X1.
- the elevating mechanism 13 raises or lowers the upper surface (loading surface) of each elevating plate 22 by vertically moving the elevating plates 22 relative to the vehicle body portion 21.
- the lifting mechanism 13 moves each lifting plate 22 between the lower limit position and the upper limit position of the movable range of each lifting plate 22.
- the elevating mechanism 13 is built in the main body part 2 so as to be housed between the vehicle body part 21 and each elevating plate 22.
- the carrier device 1 is appropriately provided with a configuration other than the above, for example, a charging circuit for a storage battery.
- control system 3 has a processing unit 30, a storage unit 31, and a communication unit 32.
- the processing unit 30 also includes an acquisition unit 301, a control unit 302, a movement determination unit 303, and a determination unit 304.
- the acquisition unit 301, the control unit 302, the movement determination unit 303, and the determination unit 304 are realized as one function of the processing unit 30.
- the processing unit 30 mainly comprises a computer system having one or more processors and memories.
- the functions of the processing unit 30 are realized by the processor of the computer system executing the program recorded in the memory of the computer system.
- the program may be recorded in a memory, may be provided through an electric communication line such as the Internet, or may be recorded and provided in a non-transitory recording medium such as a memory card.
- the acquisition unit 301 executes the acquisition process.
- the acquisition process is a process of acquiring the detection result of the detection unit 11 in the transport device (moving body) 1.
- the detection result of the detection unit 11 includes the distance information related to the distance between the transfer device 1 and the object X1.
- the acquisition unit 301 acquires the detection result from the detection unit 11 at any time.
- the control unit 302 executes a first estimation process and a second estimation process.
- the first estimation process is a process of recognizing at least a part of the plurality of characteristic portions X10 based on the detection result of the detection unit 11 and estimating the position and orientation of the target object X1 from the recognition result.
- the first estimation process estimates the position and orientation of the target object X1 by recognizing all of the plurality of characteristic portions X10.
- the second estimation process is a process of recognizing at least a part of the plurality of feature units X10 based on the detection result of the detection unit 11 and estimating the type of the object X1 from the recognition result.
- the control unit 302 recognizes the plurality of characteristic portions X10 based on the detection result of the detection unit 11, and thereby estimates the relative position of each of the plurality of characteristic portions X10 with respect to the transport device 1. ..
- the processing unit 30 can estimate the position of the main body unit 2 (that is, the transport device 1) based on the detection result of the detection unit 11. Therefore, the control unit 302 can estimate the position and orientation of the object X1 based on these estimated positions. That is, in the process for estimating the position and orientation of the target object X1 (first estimation process), relative position information of the target object X1 (here, the characteristic portion X10) with respect to the transport device (moving body) 1 is used. ..
- the control unit 302 recognizes at least a part of a plurality of feature units (here, wheels as described later) X10 based on the detection result of the detection unit 11. Then, the control unit 302 estimates the type of the target object X1 corresponding to the characteristic portion X10 based on the recognized shape, size, design, or the like of the characteristic portion X10.
- the "type" of the object X1 in the present disclosure is, for example, the type of the object X1, the shape of the object X1, the size of the object X1, the maximum load weight of the object X1, the design of the object X1, and the like. ..
- the variety of the object X1 is a category classified according to the unique function of the object X1 such as a roll box pallet or a flat pallet.
- the types of the two objects X1 are different from each other when the maximum load weight is different.
- the storage unit 31 stores a plurality of models respectively corresponding to a plurality of types of target objects X1.
- Each of the plurality of models includes a template representing the corresponding feature X10. Therefore, in the second estimation process, the control unit 302 searches the plurality of templates stored in the storage unit 31 for a matching template based on the recognition result of the characteristic unit X10. Thereby, the control unit 302 can estimate the type of the target object X1 corresponding to the recognized feature portion X10.
- the control unit 302 also executes a holding process and a carrying process.
- the moving body control method includes a holding process and a transport process.
- the holding process is a process of causing the carrier device (moving body) 1 to enter below the target object X1 and causing the carrier device 1 to lift the target object X1 to hold the target object X1 in the carrier device 1.
- the control unit 302 controls the drive unit 12 in the holding process to allow the transport device 1 to slip under the object X1 (roll box pallet).
- the control unit 302 controls the elevating mechanism 13 to elevate each elevating plate 22, thereby causing the carrier device 1 to elevate the object X1.
- the transport process is a process of moving the transport device 1 to the destination while the object X1 is held by the transport device (moving body) 1.
- the control unit 302 controls the driving unit 12 in the carrying process so that the carrying device 1 holding the object X1 is moved to the movement route C1 (see FIG. 1) set by the host system 4. Move along to the destination.
- control unit 302 executes the control process.
- the control process is a process of controlling the transport device (moving body) 1 and includes various processes.
- the control process roughly includes three control processes (first control process, second control process, and third control process) that are executed in three situations.
- the second control process is a process executed during the movement of the transport device 1 to the object X1. Specifically, the second control process recognizes a part of the feature units X10 among the plurality of feature units X10 for estimating the position and orientation of the object X1 based on the detection result of the detection unit 11. , Is a process of controlling the transport device (moving body) 1. Here, the second control process is executed in parallel with the first estimation process.
- the object X1 is a roll box pallet.
- the plurality (here, four) wheels of the roll box pallet correspond to the plurality of characteristic portions X10, respectively.
- the plurality of feature portions X10 include the legs (wheels) of the object X1 (roll box pallet).
- the second control process is a process of controlling the moving body 1 when a part of the wheels of the roll box pallet is recognized based on the detection result of the detection unit 11. ..
- the second control process is executed in order to move the transport device 1 to the object X1, that is, to bring the transport device 1 into a state where it can slip under the object X1.
- a specific mode of the second control process will be described in “(3.1) First operation example” described later.
- the third control process is a process executed during the movement of the transport device 1 to the target X1, and is a process performed during the start of the movement of the transport device 1 to the target X1. Specifically, the third control process controls the transport device (moving body) 1 when the movement determination unit 303 (that is, the movement determination process) described later determines that the target object X1 is moved. It is a process. The third control process moves the carrier device 1 to the target object X1 even when the carrier device 1 moves to the target object X1 even when the target object X1 is shaken or the like, that is, the carrier device 1 is moved. It is executed to make it possible to sneak under the object X1. A specific mode of the third control processing will be described in “(3.2) Second operation example” described later.
- the first control process is a process executed while the transport device 1 holds the object X1 and transports it to the destination.
- the first control process is a process of controlling the transport device (moving body) 1 when the determination unit 304 (that is, the determination process) described later determines that the protrusion from the movement path C1 occurs.
- the carrier 1 holds the object X1 and conveys it to the destination while the carrier 1 including the object X1 is on the movement path C1 while the object X1 is being conveyed to the destination. It is executed to move.
- a specific mode of the first control processing will be described in “(3.3) Third operation example” described later.
- the movement determination unit 303 executes the movement determination process.
- the movement determination process is a process of determining whether or not the object X1 has moved while the transport device (moving body) 1 is being moved to the object X1.
- the movement determination process is executed at any time while the transport device 1 is moving to the object X1.
- a specific mode of the movement determination process will be described in “(3.2) Second operation example” described later.
- the determination unit 304 executes the determination process.
- the determination process is a process of determining whether or not the transport device (moving body) 1 in the state of transporting the object X1 protrudes from the movement path C1.
- the moving route C1 is a route in which the transport device 1 including the object X1 is allowed to pass.
- the determination process is executed at any time while the transport device 1 holds the object X1 and transports it to the destination. A specific aspect of the determination process will be described in “(3.3) Third operation example” described later.
- the communication unit 32 communicates with the host system 4 directly or indirectly via a network or a relay.
- a communication method between the communication unit 32 and the host system 4 an appropriate communication method such as wireless communication or wire communication is adopted.
- the communication unit 32 is set to a standard such as Wi-Fi (registered trademark), Bluetooth (registered trademark), ZigBee (registered trademark), or a low-power radio (specified low-power radio) that does not require a license.
- Adopt compliant wireless communication that uses radio waves as a communication medium.
- the control unit 302 does not execute any of the first control process, the second control process, and the third control process. That is, in the basic operation example, it is assumed that the transport device 1 recognizes all the feature portions X10 (wheels) of the object X1 in the first first estimation process after reaching the front of the object X1. .. Further, in the basic operation example, it is assumed that the object X1 does not move while the transport device 1 moves to the object X1. Further, in the basic operation example, it is assumed that the transport device 1 does not protrude from the movement path C1 while holding the object X1 and transporting it to the destination.
- the control system 3 moves the carrier device 1 toward the target node C0 set near the pallet yard according to the command (transport command) from the host system 4 and the electronic map. At this time, the carrier device 1 moves along the movement route C1 set by the host system 4.
- the control system 3 determines that the carrier device 1 has arrived at the pallet storage area and stops the carrier device 1.
- the operation mode of the control system 3 shifts to the independent mode.
- the independent mode is an operation mode in which the control system 3 can independently control the transport device 1 without receiving a command from the host system 4.
- the control system 3 that has shifted to the independent mode executes the acquisition process and the first estimation process while the transfer device 1 is stopped on the target node C0.
- the detection unit 11 sensor 110
- the control system 3 acquires the detection result of the detection unit 11 regarding the target object X1.
- the control system 3 recognizes the plurality of feature units X10 based on the detection results of the detection unit 11 to estimate the relative positions of the plurality of feature units X10 with respect to each of the transport devices 1. ..
- the control system 3 estimates the position and orientation of the object X1 by this first estimation process.
- the control system 3 estimates the type of the target object X1 by executing the second estimation process together with the first estimation process.
- the control system 3 executes the holding process.
- the control system 3 sets the position of the object X1 (here, the position below the object X1) as the target point based on the estimation result of the position, orientation, and type of the object X1.
- the control system 3 moves the carrier device 1 to the target point (that is, the target object X1).
- the control system 3 moves the transport device 1 to the target object X1 by combining turning and forward movement according to the relative position between the transport device 1 and the target object X1, or draws a curved trajectory.
- the control system 3 moves the carrier device 1 to the object X1 based on the determined mode.
- the transport device 1 is in a state of sneaking under the object X1.
- the control system 3 raises each elevating plate 22 by controlling the elevating mechanism 13.
- the transport device 1 is in a state of lifting and holding the object X1.
- control system 3 executes the transport process.
- the control system 3 controls the drive unit 12 to move the carrier device 1 holding the object X1 to the destination along the movement route C1 set by the host system 4.
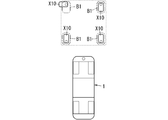
- the first operation example shows an example of the operation when only a part of the characteristic portions X10 (wheels) can be recognized in the first estimation processing in the basic operation example.
- the detection unit 11 (sensor 110) of the transport device 1 emits light (laser light) toward an area defined by a predetermined angle with the detection unit 11 as the apex.
- the broken line extending from the sensor 110 represents the light projected from the sensor 110.
- the detection unit 11 can measure the distance to the characteristic portion X10 based on the reflected light, that is, can recognize the characteristic portion X10.
- the detection unit 11 and the plurality of (here, two) feature units X10 are arranged in a straight line
- the light projected from the detection unit 11 is a plurality of light.
- the feature unit X10 on the detection unit 11 side reflects.
- the detection unit 11 can receive only the reflected light from some of the characteristic units X10 (here, the characteristic unit X10 on the detection unit 11 side), and as a result, some Only the characteristic part X10 can be recognized.
- the control system 3 executes the second control process. That is, in the first operation example, when the control system 3 recognizes a part of the characteristic parts X10 among the plurality of characteristic parts X10 based on the detection result of the detection part 11, the control system 3 controls the transport device 1.
- the control system 3 executes a process of moving the transport device 1 to a position where all the feature units X10 are presumed to be recognizable. That is, the control process (second control process) includes a sub process of moving the transport device (moving body) 1 to a position where all of the plurality of characteristic portions X10 of the object X1 can be recognized.
- step S16 Yes, S15, S18 or the process of step S16: No, S17a to S17d, S15, S18 corresponds to the second control process.
- the first operation example shown in FIG. 4 is started when the transport device 1 reaches the target node C0 set near the pallet storage area.
- the control system 3 stops the transfer device 1 and puts the transfer device 1 on standby as described above (S10). Then, the operation mode of the control system 3 shifts to the independent mode. After that, the control system 3 acquires the detection result of the detection unit 11 (sensor 110) by executing the acquisition process (S11). As a result, the control system 3 acquires the detection result of the detection unit 11 regarding one or more feature units X10 of the object X1.
- the control system 3 executes the first estimation process. That is, the control system 3 attempts to recognize all the feature units X10 of the object X1 based on the detection result of the detection unit 11 (S12). Then, the control system 3 executes the second estimation process in parallel with the first estimation process. That is, the control system 3 searches for a matching template from a plurality of templates stored in the storage unit 31 based on the recognition result of the feature unit X10 in the first estimation process, thereby determining the type of the object X1. Estimate (S13).
- the control system 3 when the control system 3 can recognize all the feature units X10 (S14: Yes), the control system 3 of the object X1 is based on the recognition results of all the feature units X10. The position and orientation are estimated (S15). In addition, in the first estimation process, only some of the feature portions X10 can be recognized (S14: No), but the position and orientation of the target object X1 can be estimated based on the recognition results of some of the feature portions X10 (S16). : Yes), the control system 3 estimates the position and orientation of the object X1 (S15).
- the majority of the plurality of feature portions X10 (for example, three wheels out of four wheels) can be recognized, and more preferably, the states of these feature portions X10 are the same (for example, 3 wheels). It can occur when the two wheels are oriented in the same direction).
- the control system 3 executes the sub-process. Such a situation may occur when only half or less (for example, two wheels out of four wheels) of the plurality of feature portions X10 can be recognized.
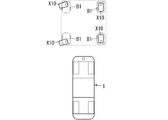
- the control system 3 estimates the positions where all the feature units X10 can be recognized (hereinafter, also referred to as "recognizable positions") based on the recognition results of some of the feature units X10 (S17a). Then, the control system 3 moves the transport device 1 to the estimated recognizable position (S17b).
- the detection unit 11 (sensor 110) reflects light from two feature units X10 on the detection unit 11 side among a plurality (here, four) of feature units X10 (wheels). Is received.
- the control system 3 is on the normal line A10 passing through the center of the line segment connecting the two characteristic portions X10 on the side of the recognized detection unit 11 and is separated by a predetermined distance from the object X1. Is estimated as a recognizable position. Then, the control system 3 moves the transport device 1 to the recognizable position, as shown in FIG. 5B.
- the control system 3 first turns the conveyance device 1 (here, turns right) so that the sensor 110 faces the area A1. Then, the control system 3 advances the transport device 1 until the center of the transport device 1 almost coincides with the center of the area A1. After that, the control system 3 turns the conveyance device 1 (here, turns left) until the sensor 110 is located on the normal line A10. In this way, the control system 3 moves the transport device 1 by combining turning and advancing to move the transport device 1 to the area A1 (that is, the recognizable position). Then, at the recognizable position, the light projected from the detection unit 11 (sensor 110) can reach all the feature units X10.
- control system 3 recognizes all the feature units X10 by executing the acquisition process (S11) and the first estimation process (S12) again while the transfer device 1 is in the recognizable position. It becomes possible. If the detection unit 11 still cannot recognize all the feature portions X10, the control system 3 may change the recognizable position by executing sub-processes (S17a to S17d).
- control system 3 sequentially executes the holding process and the carrying process, as in the basic operation example. That is, the control system 3 moves the carrier device 1 to the target point (that is, the object X1) (S18).
- the transport device 1 can autonomously travel. That is, in this operation example, when the feature portion X10 is recognized, the transport device 1 is moved to a position (recognizable position) where the feature portion X10 can be easily recognized, and the transport device 1 is transported without taking the above measures. It is possible to take some measures to move the device 1 to the object X1. That is, in this operation example, there is an advantage that the transport device 1 can be easily moved to the object X1 smoothly.
- the object X1 when the object X1 is placed at a predetermined position by a machine before the carrying device 1 carries the object X1, the object X1 is placed at a predetermined position by the machine in a substantially accurate position and orientation. To. In this case, after reaching the target node C0, the transport device 1 can sneak under the object X1 simply by moving forward.
- the object X1 when the object X1 is placed at a position preset by a person, the object X1 may be placed out of the predetermined position or moved from the predetermined position depending on the politeness of the person carrying the carrying work. It is placed at an angle. In this case, after reaching the target node C0, the transport device 1 may not be able to sneak under the object X1 simply by moving forward.
- this operation example even in the latter case, the transport device 1 can sneak under the target object X1 after reaching the target node C0. That is, this operation example also has an advantage that it is not necessary to request the person who carries the target object X1 to the predetermined position for the accuracy of arranging the target object X1.
- the control system 3 executes the acquisition process and the first estimation process at any time even during the execution of the sub process. Therefore, the control system 3 may be able to estimate the position and orientation of the object X1 while moving the transfer device 1 to the recognizable position.
- the control system 3 interrupts the sub-processing and holds the processing when the position and orientation of the object X1 can be estimated (S15) even during the execution of the sub-processing.
- the carrying process may be executed, that is, the carrying device 1 may be moved to the object X1 (S18).
- the control system 3 completes the movement of the transfer device 1 to the recognizable position (S17d: No). , The movement of the transport device 1 is continued (S17b). On the other hand, when the transport device 1 completes the movement to the recognizable position (S17d: Yes), the control system 3 executes the acquisition process (S11) and the first estimation process (S12) again.
- control process includes a main process (S18) for moving the carrier device (moving body) 1 to the object X1. Then, the main process may be executed when the position and orientation of the object X1 are estimated in the middle of the sub process (S17c: Yes, S15).
- the main process also serves as a part of the holding process (that is, the process of causing the carrier device 1 to enter below the object X1). Therefore, when the control system 3 executes the main process, in the holding process, it is only necessary to execute the process of causing the transport device 1 to lift the object X1 and holding the object X1 in the transport device 1.
- the main process (S18) is also executed when the second control process includes the processes of steps S16: Yes and S15. Specifically, the main process is executed even when the position and orientation of the object X1 can be estimated only by a part of the feature portions X10 instead of recognizing all the feature portions X10. That is, the control process (second control process) includes the main process. Then, the main process may be executed by estimating the position and orientation of the object X1 based on the recognition results of some of the characteristic portions X10.
- the control system 3 may make the transport device 1 enter below the object X1 by combining turning and advancing, or draw a curved trajectory as shown in FIG.
- the transport device 1 may be made to enter below the object X1.
- the control system 3 directly moves the transport device 1 to the area A2 below the target object X1 without moving the transport device 1 to the recognizable position. That is, the main process may include a process of moving the transfer device (moving body) 1 so as to draw a curved trajectory.
- the second operation example shows an example of an operation in the middle of moving the transport device 1 to the object X1 in the holding process in the basic operation example.
- the target X1 may move while the transport device 1 is being moved to the target X1.
- the "movement of the object" referred to in the present disclosure includes a movement to which the position and orientation of the object X1 estimated by the first estimation process deviate. Therefore, the movement of the target object X1 may include a mode in which only the part (characteristic portion X10) of the target object X1 moves in addition to the mode in which the entire target object X1 moves.
- the movement of the target object X1 is, for example, not only when an operator touches the target object X1 and receives an external force, but also depending on the situation of the placement surface of the target object X1 (the placement surface is inclined, etc.). This can happen if X1 moves naturally according to gravity.
- the target object X1 when the target object X1 is a roll box pallet, the target object X1 may be moved by moving the entire roll box pallet or by the wheels (characteristic portion X10) of the roll box pallet. It may include a mode in which the position is shifted by rotating on the spot.
- the wheel in this case is a so-called universal wheel.
- a free wheel is a wheel whose traveling direction is not fixed and can be freely changed. The free wheel is configured to be rotatable around a position attached to the body of the roll box pallet. Therefore, by rotating the free wheel, the position of the feature portion X10 may be changed even if the position of the entire object X1 is not changed.
- the object X1 moves during the movement of the transport device 1 to the object X1, the object X1 will deviate from the position and orientation estimated in the first estimation process.
- the control system 3 continues to move the carrier device 1 to the object X1, the carrier device 1 does not reach the object X1 or the carrier device 1 because the object X1 deviates from the estimated position and orientation.
- the control system 3 may not be able to achieve the purpose of moving the transport device 1 to the object X1 (here, the transport device 1 is made to enter below the object X1).
- the control system 3 executes the movement determination process. That is, in the second operation example, the control system 3 determines whether or not the object X1 is moving while the transfer device 1 is being moved to the object X1. In this operation example, the control system 3 acquires the detection result of the detection unit 11 (sensor 110) at any time (that is, executes the acquisition process at any time) to obtain the plurality of feature units X10 (wheels) of the object X1. Keep monitoring. Then, the control system 3 determines whether or not the target object X1 has moved based on the movement of one or more characteristic portions X10 among the plurality of characteristic portions X10. That is, the movement determination process determines whether or not the target X1 has moved based on the movement of one or more monitoring targets among the plurality of monitoring targets (characteristic portions X10) included in the target X1.
- the control system 3 executes the third control process. That is, in the second operation example, the control system 3 controls the transport device 1 when it is determined in the movement determination process that the object X1 is moved.
- the control system 3 attempts a process of correcting the trajectory of the transport device 1 with respect to the target object X1 and then moving the transport device 1 to the target object X1 again. That is, the control process (third control process) includes a retry process of correcting the trajectory of the transport device (moving body) 1 with respect to the target object X1 and moving the transport device 1 to the target object X1 on the corrected trajectory. ..
- steps S21, S23 to S26 correspond to the movement determination processing
- steps S27 and S28 correspond to the third control processing.
- the second operation example shown in FIG. 8 is started from the time when the control system 3 completes the estimation of the position and orientation of the object X1 by the first estimation process.
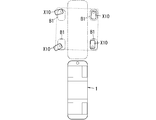
- the control system 3 starts the holding process, as already described. That is, the control system 3 sets the position of the target object X1 (here, the position below the target object X1) as the target point based on the estimation result of the position, the direction, and the type of the target object X1, and the transport device The process of moving 1 to the object X1 is started. At this time, the control system 3 sets the monitoring area B1 (see FIG. 9) before starting the holding process (S21).
- the control system 3 sets the monitoring area B1 for each of the plurality of feature parts X10 recognized in the first estimation process.
- the "monitoring area” referred to in the present disclosure is a certain area including the entire feature unit X10. That is, the number of monitoring areas B1 matches the number of the plurality of characteristic portions X10.
- the “monitoring area setting” in the present disclosure means that the control system 3 sets a certain range (that is, the monitoring area B1) including the position (coordinates) of the characteristic portion X10 as a monitoring target. That is, the number of monitoring targets matches the number of the plurality of feature units X10.
- the control system 3 starts moving the transport device 1 to the object X1 (S22). While the transport device 1 is moving to the object X1, the control system 3 acquires the detection result of the detection unit 11 (sensor 110) at any time (that is, executes the acquisition process at any time) (S23). Then, the control system 3 constantly monitors whether or not the positions of the plurality of characteristic portions X10 based on the detection result of the detection unit 11 are within the corresponding monitoring area B1 (S24). That is, the movement determination process determines whether or not the object X1 has moved based on the detection result of the detection unit 11 of the transport device (moving body) 1.
- the control system 3 monitors whether or not the characteristic portion X10 corresponding to the predetermined number or more of the monitoring areas B1 is included (S25).
- each of the plurality of characteristic portions X10 (wheels) is a free wheel. That is, one or more monitoring targets include a free wheel. Therefore, in the present embodiment, the corresponding characteristic portion X10 may be disengaged from the monitoring area B1 not only when the entire object X1 moves but also when the universal wheel rotates (see FIGS. 10 and 11). ).
- the control system 3 determines that the target object X1 has not moved if the number of the characteristic portions X10 that are contained in the monitoring area B1 exceeds half the number of the plurality of characteristic portions X10. .. On the other hand, the control system 3 determines that the object X1 is moving if the number of the characteristic portions X10 that are contained in the monitoring area B1 is equal to or less than half the number of the plurality of characteristic portions X10.
- the feature portion X10 is housed in each of the three monitoring areas B1 out of the four monitoring areas B1. Therefore, in the example shown in FIG. 10, the number of the feature portions X10 contained in the monitoring area B1 is "3", which is more than half of the number of the plurality of feature portions X10 "4", so that the control system 3 determines that the object X1 has not moved.
- the feature portion X10 is housed in each of the two monitoring areas B1 out of the four monitoring areas B1. Therefore, in the example shown in FIG. 11, the number of the characteristic portions X10 that are accommodated in the monitoring area B1 is “2”, which is less than half the number “4” that is the number of the plurality of characteristic portions X10. Determines that the object X1 is moving.
- the control system 3 continues to move the transport device 1 to the object X1 (S22). ..
- the control system 3 determines that the object X1 is moving (S26). Then, the control system 3 determines whether or not the movement of the transfer device 1 to the object X1 can be continued without modifying the trajectory of the transfer device 1 (S27).
- the control system 3 determines whether or not at least a part of the feature portion X10 overlaps the set target point (region surrounded by the alternate long and short dash line). By doing so, it is determined whether or not the movement of the transport device 1 to the object X1 can be continued. In the example shown in FIG. 12, since none of the characteristic portions X10 overlaps the set target point, the control system 3 determines that the movement of the transport device 1 to the object X1 can be continued. On the other hand, in the example shown in FIG. 13, since the set target point is overlapped with the characteristic portion X10, the control system 3 determines that the movement of the transport device 1 to the object X1 cannot be continued.
- the control system 3 executes the retry process (S28). In this operation example, the control system 3 can execute two processes (first retry process and second retry process) as the retry process.
- the carrier device 1 is returned to the point before the start of the movement to the target point, and then the acquisition process and the first estimation process are performed to set the target point again and the carrier device 1 is set.
- This is a process of moving to the object X1. That is, the retry process includes a process of returning the transport device 1 to the position where the transport device (moving body) 1 starts moving to the object X1 before correcting the trajectory.
- FIGS. 14A to 14D A specific example of the first retry process will be described with reference to FIGS. 14A to 14D.
- FIGS. 14A to 14D it is assumed that the entire target object X1 moves while the transport device 1 is moving to the target object X1.
- FIG. 14A shows the time when the transport device 1 starts moving to the object X1. At this point, the object X1 is not moving.
- FIG. 14B shows a state in which the object X1 is moved while the transport device 1 is moving to the object X1. At this point, the control system 3 determines that the object X1 is moving by the movement determination process.
- FIG. 14A shows the time when the transport device 1 starts moving to the object X1.
- FIG. 14B shows a state in which the object X1 is moved while the transport device 1 is moving to the object X1.
- the control system 3 determines that the object X1 is moving by the movement determination process.
- FIG. 14A shows the time when the transport device 1 starts moving to the
- FIG. 14C the control system 3 executes the first retry process, and thereby the carrier device 1 is returned to the point before the movement to the target point is started (that is, the position where the carrier device 1 is located in FIG. 14A).
- FIG. 14D shows a process in which the control system 3 executes the first retry process to reset the target point to a position where the moved object X1 is located and to move the transfer device 1 to the target object X1 again. It shows the time when it started.
- the first retry process can be executed, for example, when it is difficult to correct the trajectory from the point where it is determined that the object X1 has moved.
- the second retry process is a process of moving the transport device 1 to the object X1 by resetting the target point again after the acquisition process and the first estimation process at the point where it is determined that the object X1 has moved. is there. That is, the retry process includes a process of moving the transport device (moving body) 1 to the object X1 so as to follow the movement of the object X1.
- FIGS. 15A to 15C A specific example of the second retry process will be described with reference to FIGS. 15A to 15C.
- FIGS. 15A to 15C it is assumed that the entire object X1 moves while the transport device 1 is moving to the object X1.
- FIG. 15A shows the time when the transport device 1 starts moving to the object X1. At this point, the object X1 has not moved.
- FIG. 15B shows a state in which the object X1 has moved while the transport device 1 is moving to the object X1. At this point, the control system 3 determines that the object X1 is moving by the movement determination process.
- FIG. 15A shows the time when the transport device 1 starts moving to the object X1. At this point, the object X1 has not moved.
- FIG. 15B shows a state in which the object X1 has moved while the transport device 1 is moving to the object X1. At this point, the control system 3 determines that the object X1 is moving by the movement determination process.
- 15C shows a process in which the control system 3 executes the second retry process to reset the target point to a position where the target object X1 after the movement is present and move the transport device 1 to the target object X1 again. It shows the time when it started.
- the process of returning the transport device 1 to the point before the start of the movement to the target point is not executed.
- the second retry process can be executed, for example, when it is possible to sufficiently correct the trajectory even from a point where it is determined that the object X1 has moved.
- the control system 3 may execute a notification process for notifying that the object X1 has moved, instead of executing the retry process or in parallel with the retry process. That is, the control process (third control process) may include a process of notifying that the object X1 has moved.
- the control system 3 may notify the surroundings that the object X1 has moved by, for example, outputting a notification message from the speaker provided in the transport device 1. In this case, the worker who hears the notification message can take measures such as returning the object X1 to the original position.
- the control system 3 may notify the host system 4 via the communication unit 32 that the object X1 has moved. In this case, the administrator of the upper system 4 may take measures such as returning the object X1 to the original position by going to the site by himself or instructing to dispatch a worker to the site. It is possible.
- the control system 3 determines that there is a movement of the target object X1 in the movement determination process, and when the target object X1 has moved to a position separated from the target point by a predetermined distance or more, the conveyance is performed.
- the device 1 may be stopped. That is, the control process (third control process) may include a process of stopping the movement of the transport device (moving body) 1 to the object X1 when the object X1 deviates from the predetermined region.
- This mode has an advantage that it is easy to prevent the transport device 1 from entering the area controlled by the other transport device 1 and hindering the operation of the other transport device 1.
- control system 3 may detect in which direction the object X1 has moved. That is, the control process (third control process) may include a process of detecting the direction in which the target object X1 deviates from the predetermined area. This process can be executed, for example, by tracking the position of the characteristic portion X10 based on the detection result of the detection unit 11 (sensor 110). In this mode, there is an advantage that the position of the target object X1 after movement can be easily grasped. Further, in this aspect, when it is determined that the object X1 has moved to the area controlled by the other transport device 1, the control system 3 may notify the upper system 4 via the communication unit 32 to that effect. .. In this aspect, the host system 4 can instruct the other transport device 1 to transport the moved object X1.
- control system 3 may determine the process (retry process, notification process, or the like) to be executed in the third control process according to the determination result of the movement determination process. That is, the content of the control process (third control process) may be determined according to the mode of movement of the object X1. In the movement determination process, it is possible to determine the movement of the object X1, the moving direction, the moving speed, and the deviation of the object X1 from the detectable area.
- the third operation example shows an example of an operation in the middle of the conveyance process in the basic operation example, in which the conveyance device 1 holds the object X1 and conveys it to the destination.
- the transport device 1 While the transport device 1 holds the object X1 and transports it to the destination, the transport device 1 may turn in order to change the direction.
- the transport device 1 holds the object X1 by lifting the object X1 in a state of entering below the object X1, and then returns to the original position (target node C0).
- the movement path C1 includes an area C10 in which the object X1 is arranged and the transfer device 1 is allowed to move.
- Area C10 is, for example, a pallet storage area. A plurality of such areas C10 may be set on the moving surface 200. In the example shown in FIG. 16, three areas C10 are set on the moving surface 200.
- the transport device 1 transports the object X1 arranged in the central area C10 of the three areas C10.
- the object X1 may be arranged outside the predetermined position D1 or may be predetermined depending on the politeness of the person carrying the transportation work. It may be arranged at an angle from the position D1.
- the object X1 is arranged at a position deviated from the predetermined position D1.
- the object X1 may protrude from the area C10 (that is, the movement path C1) to the adjacent area C10. In this case, the target object X1 may come into contact with another target object X1 in the adjacent area C10 or equipment.
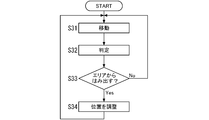
- the control system 3 executes the determination process.
- the control system 3 is allowed to pass the transport device 1 including the target object X1 with respect to the transport device (moving body) 1 that is transporting the target object X1. It is determined whether or not the protrusion from the moving path C1 occurs.
- the determination process determines, for example, whether or not the protrusion from the movement path C1 occurs at the present time, and also determines whether or not the protrusion from the movement path C1 occurs several tens of seconds or a few minutes after the current time. May be.
- the control system 3 determines whether or not the transfer device 1 including the object X1 protrudes from the area C10 while the transfer device 1 is turning while holding the object X1.
- the determination process includes a process of determining whether or not the protrusion from the area C10 (moving path C1) occurs when the transport device (moving body) 1 turns.
- the control system 3 executes the first control process. That is, in the third operation example, the control system 3 controls the transport device (moving body) 1 when it is determined in the determination process that the protrusion from the area C10 (moving path C1) occurs.
- the control system 3 attempts an adjustment process for correcting the trajectory so that the transport device 1 including the object X1 does not protrude from the area C10. That is, the control process (first control process) includes a process of adjusting the position of the turning center when the transport device (moving body) 1 turns so as not to protrude from the area C10 (moving path C1).
- step S32 and S33 correspond to the determination process
- step S34 corresponds to the first control process.
- the third operation example shown in FIG. 17 is started when the control system 3 completes the holding process, that is, when the transport device 1 lifts and holds the object X1.
- the control system 3 starts the transport process as described above. That is, the control system 3 starts the process of moving the carrier device 1 to the destination along the movement route C1 (S31).
- the control system 3 acquires the detection result of the detection unit 11 at any time while the transport device 1 is moving to the destination.
- the detection result of the detection unit 11 acquired here is not the detection result of the sensor 110 but the rotation speed of the drive wheels and the like. That is, the control system 3 continues to monitor the position of the main body 2 (transport device 1) by acquiring the detection result of the detection unit 11 as needed.
- the control system 3 estimates the type of the object X1 by the already completed second estimation process. Therefore, the control system 3 knows the shape and size of the object X1 held by the transport device 1. Therefore, the control system 3 can continue to monitor the area occupied by the transport device 1 including the object X1 based on the detection result of the detection unit 11 and the estimation result of the second estimation process. Then, the control system 3 determines at any time whether or not the area occupied by the transport device 1 including the object X1 is within the area C10 (S32). That is, the determination process determines whether or not the protrusion from the area C10 (movement path C1) occurs based on the shape and size of the object X1.
- the control system 3 keeps moving the transport device 1 to the destination ( S31).
- the control system 3 executes the adjustment process to carry the transport device 1. The position of is adjusted (S34).
- FIG. 18A shows a state immediately before the object X1 protrudes from the area C10 while the transport device 1 is turning (turning to the left).
- the control system 3 determines that the determination process may cause the protrusion from the movement route C1 (area C10).
- the control system 3 adjusts the position of the turning center of the carrier device 1 by moving the carrier device 1 to a position where it does not protrude from the area C10 even if the carrier device 1 turns.
- FIG. 18B the control system 3 adjusts the position of the turning center of the transport device 1 by moving the transport device 1 backward to the center portion in the width direction of the area C10.
- the control system 3 restarts the movement of the transfer device 1 to the destination (S31).
- this operation example when it is determined that the object X1 protrudes from the movement path C1, some measures such as correction of the trajectory of the transport device 1 can be taken. Therefore, in the present operation example, unlike the moving body control method of the third comparative example, it is unlikely that the object X1 will come into contact with another object X1 in the adjacent area C10, equipment, or the like. In other words, this operation example has an advantage that the transport device (moving body) 1 can be smoothly moved while holding the object X1. Further, in this operation example, it is not necessary to widen the width of the area C10, and therefore, there is an advantage that a problem that may occur when the width of the area C10 is widened cannot occur.
- the control system 3 may execute the process of changing the moving route C1 instead of executing the adjustment process. Specifically, when the control system 3 determines in the determination process that the transport device 1 extends beyond the current movement route C1, the control system 3 searches for a route that the transport device 1 can move without protruding, and finds the searched route. It may be set as a new movement route C1. That is, the control process (first control process) may include a process of changing the moving route C1 to a route in which the transport device (moving body) 1 can move without protruding.
- the control system 3 may execute a notification process for notifying that the protrusion from the travel route C1 occurs instead of performing the adjustment process or in parallel with the adjustment process. That is, the control process (first control process) may include a process of notifying that the protrusion from the movement route C1 occurs.
- the control system 3 may notify the surroundings that a protrusion from the movement path C1 may occur, for example, by outputting a notification message from a speaker provided in the transport device 1. In this case, the worker who hears the notification message can take measures such as temporarily moving the other object X1 or equipment in the area adjacent to the movement path C1 away from the movement path C1.
- the control system 3 may notify the host system 4 via the communication unit 32 that the movement path C1 may protrude from the movement path C1.
- the administrator of the higher-level system 4 heads to the site by himself or gives an instruction to dispatch a worker to the site, thereby causing another object X1 or equipment in the area adjacent to the movement route C1. It is possible to take measures such as temporarily moving the or the like away from the movement path C1.
- the control system 3 executes the adjustment process including the turning according to whether or not the turning is permitted in the movement route C1, or stops the transport device 1 to perform the notification process.
- the contents of the first control process, such as whether to execute it, may be determined. That is, the control process (first control process) includes a process of determining whether or not to rotate the transfer device 1 based on information on whether or not the transfer device (moving body) 1 is allowed to turn. You may stay.
- the control system 3 when the control system 3 has been permitted by the upper system 4 to protrude from the movement route C1 in advance, the control system 3 causes the conveyance device 1 to move to the destination regardless of the result of the determination process. You may continue. That is, the control process (first control process) may include a process of permitting the protrusion from the travel route C1 regardless of the determination result of the determination process when the predetermined permission condition is satisfied.
- the host system 4 moves with respect to the control system 3, for example, when the object X1 or the like is not arranged in the adjacent area C10 (movement path C1) and there is a vacancy (that is, when a predetermined condition is satisfied). The protrusion from the route C1 is permitted.
- control system 3 may notify the upper system 4 of the result of the determination process via the communication unit 32 without executing the first control process. That is, the control system 3 may further execute an output process of outputting the result of the determination process to the host system 4 that remotely controls the transport device (moving body) 1.
- the higher-level system 4 that has received the determination result issues another command, such as temporarily prohibiting the movement of the other corresponding transport device 1 on the other moving route C1 adjacent to the moving route C1, to another direction. It is possible to take measures such as notifying the carrier device 1.
- the program according to one aspect is a program for causing one or more processors to execute the above-mentioned mobile control method (including acquisition processing and first control processing). Further, the program according to one aspect is a program for causing one or more processors to execute the above-mentioned mobile body control method (including the movement determination process and the second control process). Further, the program according to one aspect is a program for causing one or more processors to execute the above-mentioned mobile body control method (including the determination process and the third control process).
- the control system 3 and the host system 4 and the like include a computer system.
- the computer system mainly comprises a processor as a hardware and a memory.
- the processor executes the program recorded in the memory of the computer system, the functions of the control system 3 and the host system 4 in the present disclosure are realized.
- the program may be pre-recorded in the memory of the computer system, may be provided through a telecommunications line, and may be recorded on a non-temporary recording medium such as a memory card, optical disk, hard disk drive, etc. readable by the computer system. May be provided.
- a processor in a computer system is composed of one or more electronic circuits including a semiconductor integrated circuit (IC) or a large scale integrated circuit (LSI).
- IC semiconductor integrated circuit
- LSI large scale integrated circuit
- the integrated circuit such as an IC or an LSI referred to here has a different name depending on the degree of integration, and includes an integrated circuit called a system LSI, VLSI (Very Large Scale Integration), or ULSI (Ultra Large Scale Integration).
- an FPGA Field-Programmable Gate Array
- a logical device capable of reconfiguring the junction relationship inside the LSI or reconfiguring the circuit partition inside the LSI should also be adopted as a processor.
- the plurality of electronic circuits may be integrated in one chip, or may be distributed and provided in the plurality of chips.
- the plurality of chips may be integrated in one device, or may be distributed and provided in the plurality of devices.
- the computer system referred to here includes a microcontroller having one or more processors and one or more memories. Therefore, the microcontroller is also composed of one or a plurality of electronic circuits including a semiconductor integrated circuit or a large scale integrated circuit.
- a plurality of functions in the control system 3 and the host system 4 are integrated in one housing. That is, the components of the control system 3 and the higher-level system 4 may be distributed and provided in a plurality of housings. Further, at least a part of the functions of the control system 3 and the upper system 4, for example, a part of the functions of the upper system 4 may be realized by a cloud (cloud computing) or the like.
- the position and orientation of the object X1 may be estimated using the detection result of the detection unit 11 (sensor 110) and the image pickup result of the camera. That is, in the process for estimating the position and orientation of the target object X1 (first estimation process), the imaging result of the camera that images the periphery of the transport device (moving body) 1 may be further used.
- the camera is installed, for example, in a facility where the mobile control system 100 is adopted.
- the camera is preferably installed at a position where the object X1 in the facility can be overlooked. In this aspect, there is an advantage that the accuracy of estimating the position and orientation of the object X1 can be improved as compared with the case where only the detection result of the detection unit 11 is used.
- the control system 3 may use the image pickup result of the camera from the first estimation process of the first time, or the camera from the first estimation process of the second and subsequent times, that is, when only a part of the feature portion X10 can be recognized.
- the imaging result of the above may be used.
- the detection unit 11 is not limited to the LiDAR, the sonar sensor, and the radar, and may include a sensor such as a stereo camera or a motion stereo camera.
- the host system 4 is not an essential component of the mobile unit control system 100 and can be omitted as appropriate.
- the control system 3 may independently control the transport device (moving body) 1.
- the transport device 1 transports the object X1 by lifting it, but the purpose is not limited to this.
- the transport device 1 transports by pulling the object X1, transports by pushing the object X1, transports by grasping the object X1, or sucks the object X1. It may be a mode of carrying.
- the transport device 1 may be configured to transport, for example, a trolley for feeder exchange as the object X1.
- the transport device 1 may mount the trolley on the electronic component mounting device by transporting the trolley to the electronic component mounting device (mounter).
- the mobile body 1 may include an automatic guided vehicle (AGV: Automated Guided Vehicle), a mobile robot, a drone, and the like.
- AGV Automated Guided Vehicle
- the “mobile robot” in the present disclosure is, for example, a wheel-type or endless track type robot.
- the moving body 1 does not have to have a function of transporting the object X1, and has a function of performing work such as picking, welding, mounting, display, customer service, security, assembly, or inspection. You may be doing it.
- the control system 3 needs to execute at least the control process, and does not have to execute other processes.
- the determination process may be executed by the host system 4 instead of being executed by the determination unit 304 of the control system 3.
- the higher-level system 4 may acquire the information necessary for the determination processing (the shape and size of the object X1 held by the transport device 1) from the transport device (moving body) 1.
- the moving body control method has the determination process and the control process (first control process).
- the determination processing is performed on the moving body (1) that is in the state of carrying the target object (X1), and the moving route (C1) through which the moving body (1) including the target object (X1) is allowed to pass.
- the control process is a process of controlling the moving body (1) based on the result of the determination process.
- the determination process includes a process of determining whether or not a protrusion from the travel route (C1) occurs when the mobile body (1) turns. ..
- control process is a process of adjusting the position of the turning center of the moving body (1) during turning so that the moving body (1) does not protrude from the moving route (C1). including.
- the moving body (1) can be easily turned without protruding from the moving route (C1).
- control processing changes the moving route (C1) to a route in which the moving body (1) can move without protruding. Including processing.
- the control process includes a process of notifying that the protrusion from the movement route (C1) occurs.
- the person around the moving body (1) or the administrator of the system (upper system (4)) including the moving body (1) takes measures against the protrusion from the moving route (C1).
- the moving route (C1) There is an advantage that it is easy to take.
- the control process is based on the information on whether or not the moving body (1) is allowed to turn. It includes a process of determining whether or not to turn (1).
- the movement route (C1) does not depend on the determination result of the determination process. Includes the process of permitting the protrusion from.
- the movement of the moving body (1) can be continued without waiting for the result of the determination process, so that the time required to move the moving body (1) to the destination can be shortened. , Has the advantage.
- the mobile body control method according to the eighth aspect is an output process in which the result of the determination process is output to the host system (4) that remotely controls the mobile body (1) in any one of the first to seventh aspects. Further has.
- the determination process is based on the shape and size of the target object (X1) and protrudes from the moving path (C1). Is generated.
- the determination process is executed by the moving body (1).
- the determination process is executed by the host system (4) that remotely controls the mobile body (1).
- the host system (4) when there are a plurality of moving bodies (1), the host system (4) performs processing for smoothly moving the moving body (1) while holding the target object (X1). There is an advantage that it can be done collectively.
- the mobile body (1) has a detection unit (11).
- the mobile body control method further includes an acquisition process and a second control process.
- the acquisition process is a process of acquiring the detection result of the detection unit (11) including distance information related to the distance between the moving body (1) and the target object (X1).
- the second control process is, apart from the first control process as the above control process, one of the plurality of feature portions (X10) for estimating the position and orientation of the object (X1) based on the detection result. When a part of the feature portion (X10) is recognized, it is a process of controlling the moving body (1).
- the moving body (1) can be easily moved to the object (X1) smoothly.
- the mobile body control method further includes a movement determination process and a third control process in any one of the first to twelfth aspects.
- the movement determination process is a process of determining whether or not the object (X1) is moving while the moving object (1) is being moved to the object (X1).
- the third control process is a process of controlling the moving body (1) when it is determined in the movement determination process that the object (X1) is moved, separately from the first control process as the above control process. Is.
- the mobile body control system (100) includes a mobile body (1) that conveys an object (X1) and a control system (3) that controls the mobile body (1).
- the control system (3) has a determination unit (304) and a control unit (302).
- the determination unit (304) for the moving body (1) that is in the state of carrying the target (X1), the movement including the target (X1) that the moving body (1) is allowed to pass through. It is determined whether or not the protrusion from the route (C1) occurs.
- the control unit (302) controls the moving body (1) based on the result of the determination unit (304).
- the program according to the fifteenth aspect is a program for causing one or more processors to execute the mobile control method according to any one of the first to thirteenth aspects.
- the methods according to the second to thirteenth aspects are not essential for the moving body control method and can be omitted as appropriate.
- the moving body control method has a movement determination process and a control process (third control process).
- the movement determination process is a process of determining whether or not the object (X1) is moving while the moving object (1) is being moved to the object (X1).
- the control process is a process of controlling the moving body (1) when it is determined by the movement determination process that the object (X1) is moving.
- the moving body (1) can be easily moved to the object (X1) smoothly.
- the control processing corrects the trajectory of the moving body (1) with respect to the object (X1), and moves the moving body (1) on the corrected trajectory. It includes a retry process of moving to the object (X1).
- the transport device (1) it is difficult for the transport device (1) to reach the target object (X1), the transport device (1) collides with the target object (X1), and the like. ) Has the advantage of being easy to achieve the purpose of moving to the object (X1).
- the retry processing is performed until the moving body (1) starts moving to the object (X1) before the trajectory is corrected.
- the process of returning to (1) is included.
- the retry process is a process of moving the mobile body (1) to the target object (X1) so as to follow the movement of the target object (X1). Including.
- the transfer device (1) is set to the object (X1).
- the control process includes a process of notifying that the object (X1) has moved.
- the person around the moving body (1) or the administrator of the system (upper system (4)) including the moving body (1) takes measures for moving the object (X1). It has the advantage of being easy.
- the control process is performed when the object (X1) is out of a predetermined area.
- a process of stopping the movement to (X1) is included.
- the control process includes a process of detecting a direction in which the object (X1) deviates from a predetermined area.
- the movement determination process is performed on the plurality of monitoring targets (characteristic part (X10)) included in the object (X1). Whether or not the object (X1) is moving is determined based on the movement of one or more of the monitored objects.
- the one or more monitoring targets include universal wheels.
- the movement determination process is based on the detection result of the detection unit (11) included in the moving body (1). Whether or not (X1) has moved is determined.
- the target object (X1) is a transport object that the mobile body (1) transports.
- the transport device (1) which is a moving body (1) for transporting the object (X1), can be easily moved to the object (X1) smoothly.
- the mobile body control method further includes a holding process and a carrying process in the twenty-sixth aspect.
- the holding process the moving body (1) is made to enter below the object (X1), the moving body (1) is lifted by the moving body (X1), and the moving body (X1) is held by the moving body (1).
- the transport process is a process of moving the moving body (1) to the destination while the object (X1) is held by the moving body (1).
- the object (X1) can be smoothly transferred to the destination by the transfer device (1) that is the moving body (1) that transfers the object (X1).
- the content of the control process is determined according to the aspect of the movement of the object (X1).
- the mobile body control system (100) includes a mobile body (1) and a control system (3) for controlling the mobile body (1).
- the control system (3) has a movement determination unit (303) and a control unit (302).
- the movement determination unit (303) determines whether or not the object (X1) is moving while the moving body (1) is being moved to the object (X1).
- the control unit (302) controls the moving body (1) when the movement determination unit (303) determines that the object (X1) is moving.
- the program according to the thirtieth aspect is a program for causing one or more processors to execute the mobile control method according to any one of the 16th to 28th aspects.
- the method according to the seventeenth to twenty-eighth aspects is not an essential method for the mobile unit control method, and can be omitted as appropriate.
- the mobile body control method includes an acquisition process and a control process (second control process).
- the acquisition process is a process of acquiring the detection result of the detection unit (11) including the distance information related to the distance between the moving body (1) having the detection unit (11) and the object (X1).
- the control process recognizes a part of the feature parts (X10) among the plurality of feature parts (X10) for estimating the position and orientation of the object (X1) based on the detection result, the moving body (1) ) Is a process to control.
- the moving body (1) can be easily moved to the object (X1) smoothly.
- the control processing moves the mobile body (1) to a position where all of the plurality of characteristic portions (X10) of the object (X1) can be recognized. Includes sub-processing to make.
- the control process includes a main process of moving the moving body (1) to the object (X1).
- the main process is executed by estimating the position and orientation of the object (X1) during the sub process.
- the control process includes a main process of moving the moving body (1) to the object (X1).
- the main process is executed when the position and orientation of the object (X1) are estimated based on the recognition result of a part of the feature portion (X10).
- the main process includes a process of moving the moving body (1) so as to draw a curved trajectory.
- the plurality of feature portions (X10) include the legs of the object (X1).
- the feature portion (X10) can be easily recognized even when the height of the moving body (1) is lower than the height of the object (X1).
- the moving body control method in any one of the 31st to 36th aspects, in the process for estimating the position and orientation of the object (X1) (first estimation process), the moving body (1st estimation process) The relative position information of the object (X1) with respect to 1) is used.
- the position and orientation of the object (X1) can be estimated by using the information that can be relatively easily acquired by the moving body (1).
- the processing for estimating the position and orientation of the object (X1) in the thirty-seventh aspect in the processing for estimating the position and orientation of the object (X1) in the thirty-seventh aspect (first estimation processing), the surroundings of the moving body (1) are imaged. Further, the image pickup result of the camera is used.
- the object (X1) is a transported object carried by the moving body (1).
- the transport device (1) which is a moving body (1) for transporting the object (X1), can be easily moved to the object (X1) smoothly.
- the moving body control method further includes a holding process and a transport process in the 39th aspect.
- the holding process the moving body (1) is made to enter below the object (X1), and the moving body (1) lifts the object (X1) to hold the object (X1) on the moving body (1). It is a process.
- the transport process is a process of moving the moving body (1) to the destination while the object (X1) is held by the moving body (1).
- the object (X1) can be smoothly transported to the destination by the transport device (1) which is a moving body (1) for transporting the object (X1).
- the mobile body control system (100) includes a mobile body (1) having a detection unit (11) and a control system (3) for controlling the mobile body (1).
- the control system (3) has an acquisition unit (301) and a control unit (302).
- the acquisition unit (301) acquires the detection result of the detection unit (11) including the distance information related to the distance between the moving body (1) and the object (X1).
- the control unit (302) recognizes a part of the feature units (X10) for estimating the position and orientation of the object (X1) based on the detection result, the control unit (302) moves. Control the body (1).
- the moving body (1) can be easily moved to the object (X1) smoothly.
- the program according to the 42nd aspect is a program for causing one or more processors to execute the mobile body control method according to any one of the 31st to 40th aspects.
- the moving body (1) can be easily moved to the object (X1) smoothly.
- the methods according to the 32nd to 40th aspects are not indispensable for the moving body control method and can be omitted as appropriate.
- Transport device (moving body) 11 detection unit 3 control system 301 acquisition unit 302 control unit 303 movement determination unit 304 determination unit 4 host system 100 mobile control system C1 movement route X1 target object X10 characteristic unit (monitoring target)
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transportation (AREA)
- Structural Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Life Sciences & Earth Sciences (AREA)
- Civil Engineering (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Geology (AREA)
- Mechanical Engineering (AREA)
- Theoretical Computer Science (AREA)
- Electromagnetism (AREA)
- Business, Economics & Management (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
- Multimedia (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
本開示の課題は、対象物を保持した状態で移動体をスムーズに移動させやすくすることにある。移動体制御方法は、判定処理と、制御処理と、を有する。判定処理は、対象物(X1)を搬送している状態にある移動体(1)について、対象物(X1)を含めて移動体(1)が通過することを許容されている移動経路(C1)からのはみ出しが生じるか否かを判定する処理である。制御処理(第1制御処理)は、判定処理の結果に基づいて、移動体(1)を制御する処理である。
Description
本開示は、一般に移動体制御方法、移動体制御システム、及びプログラムに関し、より詳細には、対象物を検知する検知部を搭載した移動体を制御するための移動体制御方法、移動体制御システム、及びプログラムに関する。
特許文献1には、パレット(対象物)を搬送するパレットトラック(移動体)が開示されている。このパレットトラックでは、トラック本体の後側(フォーク側)に対し、昇降機構によってフォークが昇降可能に組み付けられている。また、このパレットトラックでは、フォークの先端部に小車輪が組み付けられている。
例えば、特許文献1に記載されているような移動体(パレットトラック)を用いた移動体の制御方法においては、対象物であるパレットを保持した状態で移動体をスムーズに移動させることが望まれる。
本開示は、上記事由に鑑みてなされており、対象物を保持した状態で移動体をスムーズに移動させやすい移動体制御方法、移動体制御システム、及びプログラムを提供することを目的とする。
本開示の一態様に係る移動体制御方法は、判定処理と、制御処理と、を有する。前記判定処理は、対象物を搬送している状態にある移動体について、前記対象物を含めて前記移動体が通過することを許容されている移動経路からのはみ出しが生じるか否かを判定する処理である。前記制御処理は、前記判定処理の結果に基づいて、前記移動体を制御する処理である。
本開示の一態様に係る移動体制御システムは、対象物を搬送する移動体と、前記移動体を制御する制御システムと、を備える。前記制御システムは、判定部と、制御部と、を有する。前記判定部は、前記対象物を搬送している状態にある移動体が、前記対象物を含めて前記移動体が通過することを許容されている移動経路からのはみ出しが生じるか否かを判定する。前記制御部は、前記判定部の結果に基づいて、前記移動体を制御する。
本開示の一態様に係るプログラムは、1以上のプロセッサに、上記の移動体制御方法を実行させるためのプログラムである。
(1)概要
本実施形態に係る移動体制御方法は、図1に示すように、検知部11を有する移動体1を対象物X1まで移動させるための方法である。この移動体制御方法は、例えば移動体制御システム100にて実現される。図3に示すように、移動体制御システム100は、移動体1と、制御システム3と、を備えている。制御システム3は、移動体1を制御するシステムである。
本実施形態に係る移動体制御方法は、図1に示すように、検知部11を有する移動体1を対象物X1まで移動させるための方法である。この移動体制御方法は、例えば移動体制御システム100にて実現される。図3に示すように、移動体制御システム100は、移動体1と、制御システム3と、を備えている。制御システム3は、移動体1を制御するシステムである。
移動体1は、1つ以上の車輪(駆動輪)23(図2参照)で移動面200の上を移動する装置である。本実施形態では、移動体1は、対象物X1の搬送用の装置である。以下、特に断りのない限り、「移動体」を「搬送装置」という。搬送装置1は、例えば物流センター(配送センターを含む)、工場、オフィス、店舗、学校、及び病院等の施設に導入される。移動面200は、その上を搬送装置1が移動する面であり、搬送装置1が施設内を移動する場合は施設の床面等が移動面200となり、搬送装置1が屋外を移動する場合は地面等が移動面200となる。以下では、物流センターに搬送装置1を導入する場合について説明する。
搬送装置1は、図1及び図2に示すように、本体部2と、検知部11と、を備えている。本体部2は、車輪23を有しており、車輪23により移動面200上を移動する。本実施形態では、本体部2は、自律移動可能である。検知部11は、本体部2に設けられて、本体部2の周囲の状況を検知する。本開示でいう「本体部の周囲」とは、検知部11で検知可能な範囲に相当する。つまり、「本体部の周囲」が示す範囲は、検知部11の性能に依存する。すなわち、本体部2を中心とする全方位が「本体部の周囲」である場合もあれば、本体部の特定箇所を頂点とする所定角度の領域が「本体部の周囲」である場合もある。
ところで、この種の移動体1を対象物X1まで移動させるための移動体制御方法においては、移動体1を対象物X1までスムーズに移動させることが望ましい。また、移動体1が搬送装置1である場合、この種の対象物X1を搬送する搬送装置(移動体)1を移動させる移動体制御方法においては、対象物X1を保持した状態で移動体1をスムーズに移動させることが望ましい。
そこで、本実施形態に係る移動体制御方法は、以下の3つの方法により、上記の課題の解決を図っている。
第1に、移動体制御方法は、取得処理と、制御処理(第2制御処理)と、を有している。取得処理は、移動体1と対象物X1との間の距離に関連する距離情報を含む検知部11の検知結果を取得する処理である。制御処理は、検知結果に基づいて、対象物X1の位置及び向きを推定するための複数の特徴部X10のうちの一部の特徴部X10を認識すると、移動体1を制御する処理である。
この方法では、対象物X1の全ての特徴部X10を認識した場合に初めて移動体1を移動させる方法と比較して、一部の特徴部X10を認識した時点で、特徴部X10を認識しやすい位置に移動体1を移動させる等、何らかの措置をとることが可能である。つまり、この方法では、移動体1を対象物X1までスムーズに移動させやすい、という利点がある。
第2に、移動体制御方法は、移動判定処理と、制御処理(第3制御処理)と、を有している。移動判定処理は、移動体1を対象物X1まで移動させる途中において、対象物X1の移動の有無を判定する処理である。制御処理は、移動判定処理にて対象物X1の移動があると判定された場合に、移動体1を制御する処理である。
この方法では、対象物X1の移動の有無に依らず当初設定した軌道で移動体1を移動させる方法と比較して、対象物X1の移動があると判定した時点で、移動体1の軌道の修正等、何らかの措置をとることが可能である。つまり、この方法では、移動体1を対象物X1までスムーズに移動させやすい、という利点がある。
第3に、移動体制御方法は、判定処理と、制御処理(第1制御処理)と、を有している。判定処理は、対象物X1を搬送している状態にある移動体1について、対象物X1を含めて移動体1が通過することを許容されている移動経路C1(図16参照)からのはみ出しが生じるか否かを判定する処理である。移動経路C1の境界は、上位システム4により移動面200上に仮想的に設定された実体を伴わない境界の他、壁等の実体を伴う境界を含み得る。制御処理は、判定処理の結果に基づいて、移動体1を制御する処理である。
この方法では、移動経路C1からのはみ出しを考慮せずに移動体1を移動させる方法と比較して、移動経路C1からのはみ出しがあると判定した時点で、移動体1の軌道の修正等、何らかの措置をとることが可能である。つまり、この方法では、対象物X1を保持した状態で移動体1をスムーズに移動させやすい、という利点がある。
(2)詳細
以下、本実施形態に係る移動体制御システム100及び搬送装置(移動体)1の構成について、図1~図3を用いて詳細に説明する。以下では、特に断りのない限り、移動面200に直交する方向を上下方向とし、移動面200から見て搬送装置1側を「上方」、その逆を「下方」として説明する。また、以下では、搬送装置1の前進時において搬送装置1が進む向きを「前方」、その逆を「後方」として説明する。また、以下では、上下方向及び前後方向の両方向に直交する方向を左右方向として説明する。ただし、これらの方向の規定は、搬送装置1の使用態様を限定する趣旨ではない。また、図面中の各方向を示す矢印は、説明のために表記しているに過ぎず、実体を伴わない。更に、図面中の物体(例えば、搬送装置1又は対象物X1等)から延びている矢印は、物体の動く向きを表しているに過ぎず、実体を伴わない。
以下、本実施形態に係る移動体制御システム100及び搬送装置(移動体)1の構成について、図1~図3を用いて詳細に説明する。以下では、特に断りのない限り、移動面200に直交する方向を上下方向とし、移動面200から見て搬送装置1側を「上方」、その逆を「下方」として説明する。また、以下では、搬送装置1の前進時において搬送装置1が進む向きを「前方」、その逆を「後方」として説明する。また、以下では、上下方向及び前後方向の両方向に直交する方向を左右方向として説明する。ただし、これらの方向の規定は、搬送装置1の使用態様を限定する趣旨ではない。また、図面中の各方向を示す矢印は、説明のために表記しているに過ぎず、実体を伴わない。更に、図面中の物体(例えば、搬送装置1又は対象物X1等)から延びている矢印は、物体の動く向きを表しているに過ぎず、実体を伴わない。
(2.1)移動体制御システム
まず、本実施形態に係る移動体制御システム100の全体構成について説明する。
まず、本実施形態に係る移動体制御システム100の全体構成について説明する。
本実施形態に係る移動体制御システム100は、図3に示すように、制御システム3と、少なくとも1台の搬送装置1と、を備えている。本実施形態では、移動体制御システム100は、搬送装置1を複数台備えている。
本実施形態では、制御システム3は、搬送装置1に搭載されることで、搬送装置1と一体化されている。つまり、搬送装置1の1つの筐体には、搬送装置1としての機能を実現するための構成要素と、制御システム3の構成要素と、が収容されている。
本実施形態では、移動体制御システム100は、複数台の搬送装置1を備えているため、制御システム3についても、搬送装置1に対応するように複数備えている。つまり、移動体制御システム100は、複数台の搬送装置1と一対一に対応する複数の制御システム3を備えている。以下では、特に断りのない限り、任意の1台の搬送装置1、及びこの搬送装置1に搭載された制御システム3に着目して説明する。以下の説明は、残りの全ての搬送装置1及び制御システム3の各々についても同様に適用し得る。
また、本実施形態では、移動体制御システム100は、図3に示すように、搬送装置1及び制御システム3に加えて、搬送装置1を遠隔で制御する上位システム4を更に備えている。
上位システム4と制御システム3とは、互いに通信可能に構成されている。本開示において「通信可能」とは、有線通信又は無線通信の適宜の通信方式により、直接的、又はネットワーク若しくは中継器等を介して間接的に、情報を授受できることを意味する。すなわち、上位システム4と制御システム3とは、互いに情報を授受することができる。本実施形態では、上位システム4と制御システム3とは、互いに双方向に通信可能であって、上位システム4から制御システム3への情報の送信、及び制御システム3から上位システム4への情報の送信の両方が可能である。
上位システム4は、少なくとも1台(本実施形態では複数台)の搬送装置1を遠隔で制御する。具体的には、上位システム4は、制御システム3と通信することにより、制御システム3を介して間接的に搬送装置1を制御する。つまり、上位システム4は、搬送装置1に搭載された制御システム3に搬送装置1の外部から送信される指令(搬送指令)により、搬送装置1を制御する。上位システム4は、例えば、指令(搬送指令)及び電子地図等のデータを制御システム3に送信する。
本実施形態では、上位システム4は、例えばサーバであって、1以上のプロセッサ及びメモリを有するコンピュータシステムを主構成とする。コンピュータシステムのメモリに記録されたプログラムを、コンピュータシステムのプロセッサが実行することにより、上位システム4の機能が実現される。プログラムは、メモリに記録されていてもよいし、インターネット等の電気通信回線を通して提供されてもよく、メモリカード等の非一時的記録媒体に記録されて提供されてもよい。
上位システム4は、後述する搬送装置1の検知部11の検知結果等から、少なくとも搬送装置1の現在位置を推定し、目標ノードC0(図1参照)までの搬送装置1の移動経路C1(図1参照)を決定する(経路計画)。上位システム4は、この移動経路C1に沿って搬送装置1が移動するように、制御システム3を介して搬送装置1に指令を与える。これにより、搬送装置1の遠隔制御が実現される。
(2.2)搬送装置
搬送装置1は、図1及び図2に示すように、本体部2と、検知部11と、駆動部12と、昇降機構13と、を備えている。また、搬送装置1は、後述する制御システム3を更に備えている。本実施形態では、搬送装置1は、検知部11、駆動部12、及び昇降機構13を制御する処理部を、制御システム3の処理部30(後述する)と兼用している。もちろん、搬送装置1は、制御システム3の処理部30とは別に、検知部11、駆動部12、及び昇降機構13を制御するための処理部を有していてもよい。検知部11、駆動部12、昇降機構13、及び制御システム3は、いずれも本体部2に搭載されている。
搬送装置1は、図1及び図2に示すように、本体部2と、検知部11と、駆動部12と、昇降機構13と、を備えている。また、搬送装置1は、後述する制御システム3を更に備えている。本実施形態では、搬送装置1は、検知部11、駆動部12、及び昇降機構13を制御する処理部を、制御システム3の処理部30(後述する)と兼用している。もちろん、搬送装置1は、制御システム3の処理部30とは別に、検知部11、駆動部12、及び昇降機構13を制御するための処理部を有していてもよい。検知部11、駆動部12、昇降機構13、及び制御システム3は、いずれも本体部2に搭載されている。
搬送装置1は、例えば、施設の床面等からなる平坦な移動面200を自律走行する。ここでは一例として、搬送装置1は、蓄電池を備え、蓄電池に蓄積された電気エネルギを用いて動作することとする。本実施形態では、搬送装置1は、本体部2に対象物X1を積載した状態で移動面200上を走行する。これにより、搬送装置1は、例えば、施設内のある場所に置かれている対象物X1を、施設内の別の場所に搬送することが可能である。
本実施形態では、対象物X1は、荷物X11、製造工場での製品、製造途中の製品(半成品)、パレット、又は荷物X11が載せられたパレット等を含み得る。つまり、本実施形態では、対象物X1は、移動体1が搬送する搬送物である。パレットは、例えばロールボックスパレット(コールドロールボックスパレットを含む)又は平パレットである。以下では、対象物X1は、特に断りのない限り、荷物X11が載せられたロールボックスパレットである。
本体部2は、左右方向よりも前後方向に長く、かつ左右方向及び前後方向よりも上下方向の寸法が小さい直方体状である。詳しくは後述するが、本実施形態では、本体部2が対象物X1の下方に潜り込んで対象物X1を持ち上げるようにして、対象物X1が本体部2に積載される。そのため、本体部2が対象物X1の下方に生じる隙間に収まるように、本体部2の上下方向の寸法は、本体部2の左右方向の寸法に比べても十分に小さく設定されている。
本体部2は、車体部21と、複数の昇降板22と、を有している。本実施形態では、本体部2は金属製である。ただし、本体部2は、金属製に限らず、例えば、樹脂製であってもよい。
車体部21は、複数(ここでは、2つ)の車輪23と、複数(ここでは、2つ)の補助輪24と、により移動面200上に支持される。
複数の車輪23は、車体部21の長手方向(前後方向)の中央部において、車体部21の幅方向(左右方向)に間隔を空けて配置されている。複数の車輪23の各々は、駆動部12からの駆動力を受けて個別に回転可能である。各車輪23は、左右方向に延びる回転軸R1を中心に回転可能な状態で、本体部2(車体部21)に保持されている。
複数の補助輪24は、車体部21の幅方向(左右方向)の中央部において、車体部21の長手方向(前後方向)に間隔を空けて配置されている。複数の補助輪24の各々は、駆動部12からの駆動力を受けずに個別に回転可能である。
本実施形態では、複数の車輪23の全てが、駆動部12によって駆動される駆動輪である。そして、これら複数の車輪23が駆動部12によって個別に駆動されることにより、本体部2は全方向に移動可能となる。つまり、複数の車輪23が互いに異なる角速度で回転することで、左右方向のいずれかに旋回することができ、互いに同じ角速度で回転することで、直線的に走行することができる。したがって、本体部2は、前進、後進、左右方向への旋回(信地旋回及び超信地旋回を含む)を行うことができる。また、本体部2は、曲線の軌道(つまり、カーブ)を描くように移動することも可能である。
複数の昇降板22の各々は、車体部21の上面の少なくとも一部を覆うように、車体部21の上方に配置されている。本実施形態では、複数の昇降板22は、車体部21の上面の四隅をそれぞれ覆うように設けられている。各昇降板22の上面は、搬送装置1にて対象物X1を搬送する際には、対象物X1が積載される積載面となる。本実施形態では、各昇降板22の上面(積載面)は、例えば、滑り止め加工が施されることにより、昇降板22以外の部位に比べて大きな摩擦係数を有する。そのため、各昇降板22に積載された対象物X1が、各昇降板22に対して滑りにくくなる。
ここで、各昇降板22は、昇降機構13にて車体部21に対して昇降可能である。このため、本体部2が対象物X1の下方に潜り込んだ状態で、各昇降板22が上昇することにより、各昇降板22にて対象物X1が持ち上げられる。反対に、各昇降板22にて対象物X1を持ち上げた状態で、各昇降板22が下降することにより、各昇降板22から対象物X1が降ろされる。
検知部11は、本体部2の位置、本体部2の挙動、及び本体部2の周辺状況等を検知する。本開示でいう「挙動」は、動作及び様子等を意味する。つまり、本体部2の挙動は、本体部2が移動中/停止中を表す本体部2の動作状態、本体部2の速度(及び速度変化)、本体部2に作用する加速度、及び本体部2の姿勢等を含む。本開示でいう「周辺状況」には、本体部2の周辺にある対象物X1の状況を含み得る。
具体的には、検知部11は、例えば、LiDAR(Light Detection and Ranging)、ソナーセンサ、レーダ(RADAR:Radio Detection and Ranging)等のセンサを含み、これらのセンサにて本体部2の周辺状況を検知する。LiDARは、光(レーザ光)を用いて、対象物X1での反射光に基づいて対象物X1までの距離を測定するセンサである。ソナーセンサは、超音波等の音波を用いて、対象物X1での反射波に基づいて対象物X1までの距離を測定するセンサである。レーダは、マイクロ波等の電磁波(電波)を用いて、対象物X1での反射波に基づいて対象物X1までの距離を測定するセンサである。すなわち、検知部11の検知結果(検知部11の出力)は、少なくとも搬送装置1(本体部2)と対象物X1との間の距離に関連する距離情報を含んでいる。本開示でいう「距離情報」は、搬送装置1と対象物X1との間の距離が反映された情報、つまり距離に応じて変化する情報であればよく、搬送装置1と対象物X1との間の距離そのものを表す情報に限らない。また、検知部11は、例えば、速度センサ、加速度センサ、ジャイロセンサ等のセンサを含み、これらのセンサにて本体部2の挙動を検知する。
本実施形態では、検知部11は、2D-LiDARであるセンサ110を有している(図1参照)。センサ110は、本体部2の前部に設けられており、本体部2の前方の状況を主として検知するために用いられる。
また、検知部11は、駆動輪の回転数を測定する。そして、後述する処理部30は、検知部11で測定した駆動輪の回転数などの情報に基づいて本体部2の位置を推定する。つまり、本実施形態では、本体部2の位置は、主として、事前に取得した電子地図と、検知部11(センサ110)の検知結果と、いわゆるデッドレコニング(Dead-Reckoning:DR)とにより推定される。
駆動部12は、複数の車輪23のうちの少なくとも一部である駆動輪に対して、直接的又は間接的に駆動力を与える。本実施形態では、上述したように複数の車輪23の全てが駆動輪であるので、駆動部12は、複数の車輪23の全てに対して駆動力を与える。駆動部12は、車体部21に内蔵されている。駆動部12は、例えば、電動機(モータ)を含み、ギアボックス及びベルト等を介して、電動機で発生する駆動力を間接的に各車輪23に与える。また、駆動部12は、インホイールモータのように、各車輪23に対して直接的に駆動力を与える構成であってもよい。駆動部12は、処理部30から入力される制御信号に基づいて、複数の車輪23の各々を制御信号に応じた回転方向及び回転速度で駆動する。
昇降機構13は、各昇降板22を上昇させることにより対象物X1を持ち上げる機構である。言い換えれば、昇降機構13は、対象物X1を持ち上げることにより、対象物X1を保持する保持機構である。昇降機構13は、各昇降板22を車体部21に対して相対的に上下方向に移動させることにより、各昇降板22の上面(積載面)を上昇又は下降させる。昇降機構13は、各昇降板22の可動域の下限位置と上限位置との間で、各昇降板22を移動させる。昇降機構13は、車体部21と各昇降板22との間に収まるように、本体部2に内蔵されている。
また、搬送装置1は、上記以外の構成、例えば、蓄電池の充電回路等を適宜備えている。
(2.3)制御システム
制御システム3は、図3に示すように、処理部30と、記憶部31と、通信部32と、を有している。また、処理部30は、取得部301と、制御部302と、移動判定部303と、判定部304と、を有している。取得部301、制御部302、移動判定部303、及び判定部304は、処理部30の一機能として実現される。
制御システム3は、図3に示すように、処理部30と、記憶部31と、通信部32と、を有している。また、処理部30は、取得部301と、制御部302と、移動判定部303と、判定部304と、を有している。取得部301、制御部302、移動判定部303、及び判定部304は、処理部30の一機能として実現される。
処理部30は、1以上のプロセッサ及びメモリを有するコンピュータシステムを主構成とする。コンピュータシステムのメモリに記録されたプログラムを、コンピュータシステムのプロセッサが実行することにより、処理部30の機能が実現される。プログラムは、メモリに記録されていてもよいし、インターネット等の電気通信回線を通して提供されてもよく、メモリカード等の非一時的記録媒体に記録されて提供されてもよい。
取得部301は、取得処理を実行する。取得処理は、搬送装置(移動体)1における検知部11の検知結果を取得する処理である。検知部11の検知結果は、既に述べたように、搬送装置1と対象物X1との間の距離に関連する距離情報を含んでいる。取得部301は、検知部11から検知結果を随時取得する。
制御部302は、第1推定処理と、第2推定処理と、を実行する。第1推定処理は、検知部11の検知結果に基づいて複数の特徴部X10の少なくとも一部を認識し、認識結果から対象物X1の位置及び向きを推定する処理である。本実施形態では、第1推定処理は、複数の特徴部X10の全てを認識することにより、対象物X1の位置及び向きを推定することとする。第2推定処理は、検知部11の検知結果に基づいて複数の特徴部X10の少なくとも一部を認識し、認識結果から対象物X1の種類を推定する処理である。
第1推定処理では、制御部302は、検知部11の検知結果に基づいて複数の特徴部X10を認識することにより、複数の特徴部X10の各々の搬送装置1に対する相対的な位置を推定する。ここで、既に述べたように、処理部30は、検知部11の検知結果に基づいて、本体部2(つまり搬送装置1)の位置を推定することが可能である。したがって、制御部302は、推定したこれらの位置に基づいて、対象物X1の位置及び向きを推定することが可能である。つまり、対象物X1の位置及び向きを推定するための処理(第1推定処理)では、搬送装置(移動体)1に対する対象物X1(ここでは、特徴部X10)の相対的な位置情報を用いる。
第2推定処理では、制御部302は、検知部11の検知結果に基づいて複数の特徴部(ここでは、後述するように車輪)X10の少なくとも一部を認識する。そして、制御部302は、認識した特徴部X10の形状、サイズ、又はデザイン等に基づいて、特徴部X10に対応する対象物X1の種類を推定する。本開示でいう対象物X1の「種類」とは、例えば対象物X1の品種、対象物X1の形状、対象物X1のサイズ、対象物X1の最大積載重量、又は対象物X1のデザイン等である。一例として、対象物X1の品種とは、ロールボックスパレット又は平パレット等の対象物X1の固有の機能により分類される区分である。本実施形態では、例えば2つの対象物X1の品種が互いに同じロールボックスパレットであっても、最大積載重量が異なる場合には、2つの対象物X1の種類が互いに異なるとする。
具体的には、記憶部31には、複数種類の対象物X1にそれぞれ対応する複数のモデルが記憶されている。複数のモデルの各々は、対応する特徴部X10を表すテンプレートを含んでいる。したがって、制御部302は、第2推定処理において、特徴部X10の認識結果に基づいて、記憶部31に記憶されている複数のテンプレートから一致するテンプレートを検索する。これにより、制御部302は、認識した特徴部X10に対応する対象物X1の種類を推定することが可能である。
また、制御部302は、保持処理と、搬送処理と、を実行する。言い換えれば、移動体制御方法は、保持処理と、搬送処理と、を有している。保持処理は、対象物X1の下方に搬送装置(移動体)1を進入させ、搬送装置1に対象物X1を持ち上げさせて対象物X1を搬送装置1に保持させる処理である。具体的には、制御部302は、保持処理において、駆動部12を制御することにより、搬送装置1を対象物X1(ロールボックスパレット)の下方に潜り込ませる。そして、制御部302は、保持処理において、昇降機構13を制御することにより、各昇降板22を上昇させることで、搬送装置1に対象物X1を持ち上げさせる。搬送処理は、対象物X1を搬送装置(移動体)1に保持させた状態で、搬送装置1を目的地まで移動させる処理である。具体的には、制御部302は、搬送処理において、駆動部12を制御することにより、対象物X1を保持した搬送装置1を、上位システム4により設定された移動経路C1(図1参照)に沿って目的地まで移動させる。
また、制御部302は、制御処理を実行する。制御処理は、搬送装置(移動体)1を制御する処理であって、種々の処理を含んでいる。本実施形態では、制御処理は、大別して3つのシチュエーションで実行される3つの制御処理(第1制御処理、第2制御処理、及び第3制御処理)を含んでいる。
第2制御処理は、搬送装置1を対象物X1まで移動させる途中において実行される処理である。具体的には、第2制御処理は、検知部11の検知結果に基づいて、対象物X1の位置及び向きを推定するための複数の特徴部X10のうちの一部の特徴部X10を認識すると、搬送装置(移動体)1を制御する処理である。ここでは、第2制御処理は、第1推定処理と並行して実行されることになる。
本実施形態では、既に述べたように、対象物X1はロールボックスパレットである。そして、本実施形態では、ロールボックスパレットが有する複数(ここでは、4つ)の車輪が、それぞれ複数の特徴部X10に相当する。言い換えれば、複数の特徴部X10は、対象物X1(ロールボックスパレット)の脚部(車輪)を含んでいる。つまり、本実施形態では、第2制御処理は、検知部11の検知結果に基づいて、ロールボックスパレットの複数の車輪のうちの一部の車輪を認識すると、移動体1を制御する処理である。第2制御処理は、搬送装置1を対象物X1まで移動させる、つまり搬送装置1を対象物X1の下方に潜り込ませることが可能な状態とするために実行される。第2制御処理の具体的な態様については、後述する「(3.1)第1動作例」にて説明する。
第3制御処理は、搬送装置1を対象物X1まで移動させる途中において実行される処理であって、搬送装置1が対象物X1への移動を開始する途中において実行される処理である。具体的には、第3制御処理は、後述する移動判定部303(つまり、移動判定処理)にて対象物X1の移動があると判定された場合に、搬送装置(移動体)1を制御する処理である。第3制御処理は、搬送装置1が対象物X1へ移動している途中において、対象物X1が揺れる等して移動した場合でも、搬送装置1を対象物X1まで移動させる、つまり搬送装置1を対象物X1の下方に潜り込ませることが可能な状態とするために実行される。第3制御処理の具体的な態様については、後述する「(3.2)第2動作例」にて説明する。
第1制御処理は、搬送装置1が対象物X1を保持して目的地まで搬送する途中において実行される処理である。具体的には、第1制御処理は、後述する判定部304(つまり、判定処理)にて移動経路C1からのはみ出しが生じると判定すると、搬送装置(移動体)1を制御する処理である。第1制御処理は、搬送装置1が対象物X1を保持して目的地まで搬送する途中において、対象物X1を含めて移動体1が移動経路C1に収まった状態で搬送装置1を目的地まで移動させるために実行される。第1制御処理の具体的な態様については、後述する「(3.3)第3動作例」にて説明する。
移動判定部303は、移動判定処理を実行する。移動判定処理は、搬送装置(移動体)1を対象物X1まで移動させる途中において、対象物X1の移動の有無を判定する処理である。移動判定処理は、搬送装置1が対象物X1へ移動している途中において、随時実行される。移動判定処理の具体的な態様については、後述する「(3.2)第2動作例」にて説明する。
判定部304は、判定処理を実行する。判定処理は、対象物X1を搬送している状態にある搬送装置(移動体)1について、移動経路C1からのはみ出しが生じるか否かを判定する処理である。移動経路C1は、対象物X1を含めて搬送装置1が通過することが許容されている経路である。判定処理は、搬送装置1が対象物X1を保持して目的地まで搬送する途中において、随時実行される。判定処理の具体的な態様については、後述する「(3.3)第3動作例」にて説明する。
通信部32は、直接的、又はネットワーク若しくは中継器等を介して間接的に、上位システム4と通信する。通信部32と上位システム4との間の通信方式としては、無線通信又は有線通信の適宜の通信方式が採用される。本実施形態では一例として、通信部32は、Wi-Fi(登録商標)、Bluetooth(登録商標)、ZigBee(登録商標)又は免許を必要としない小電力無線(特定小電力無線)等の規格に準拠した、電波を通信媒体として用いる無線通信を採用する。
(3)動作
以下、本実施形態の移動体制御システム100の動作について説明する。まず、移動体制御システム100の基本動作例について説明する。ここでは、図1に示すように、パレット置場に置かれている対象物X1(ロールボックスパレット)を、搬送装置1にて搬送する場合を例示する。
以下、本実施形態の移動体制御システム100の動作について説明する。まず、移動体制御システム100の基本動作例について説明する。ここでは、図1に示すように、パレット置場に置かれている対象物X1(ロールボックスパレット)を、搬送装置1にて搬送する場合を例示する。
また、基本動作例においては、制御部302は、第1制御処理、第2制御処理、及び第3制御処理のいずれも実行しない、と仮定する。つまり、基本動作例においては、搬送装置1は、対象物X1の前に到達してから初回の第1推定処理において、対象物X1の全ての特徴部X10(車輪)を認識する、と仮定する。また、基本動作例においては、搬送装置1が対象物X1まで移動する途中において、対象物X1の移動がない、と仮定する。また、基本動作例においては、搬送装置1が対象物X1を保持して目的地まで搬送する途中において、移動経路C1からのはみ出しが生じない、と仮定する。
まず、制御システム3は、上位システム4からの指令(搬送指令)及び電子地図に従って、パレット置場の近傍に設定された目標ノードC0に向けて搬送装置1を移動させる。このとき、搬送装置1は、上位システム4により設定された移動経路C1に沿って移動する。搬送装置1が目標ノードC0に到達すると、制御システム3は、搬送装置1がパレット置場に到着したと判断し、搬送装置1を停止させる。このとき、制御システム3の動作モードは、単独モードに移行する。単独モードは、制御システム3が、上位システム4からの指令を受けずに単独で、搬送装置1を制御可能な動作モードである。単独モードに移行した制御システム3は、搬送装置1を目標ノードC0上に停止させたままで、取得処理及び第1推定処理を実行する。ここでは、検知部11(センサ110)が対象物X1を捉えているので、取得処理では、制御システム3は、対象物X1に関する検知部11の検知結果を取得することになる。
第1推定処理では、制御システム3は、検知部11の検知結果に基づいて複数の特徴部X10を認識することにより、複数の特徴部X10の各々の搬送装置1に対する相対的な位置を推定する。ここでは、既に述べたように、この第1推定処理により、全ての特徴部X10を認識する。したがって、制御システム3は、この第1推定処理により、対象物X1の位置及び向きを推定することになる。このとき、制御システム3は、第1推定処理と併せて第2推定処理を実行することにより、対象物X1の種類を推定する。
その後、制御システム3は、保持処理を実行する。まず、制御システム3は、対象物X1の位置、向き、及び種類の推定結果に基づいて、対象物X1の位置(ここでは、対象物X1の下方の位置)を目標地点に設定する。そして、制御システム3は、搬送装置1を目標地点(つまり、対象物X1)まで移動させる。ここで、制御システム3は、搬送装置1と対象物X1との相対的な位置に応じて、旋回及び前進を組み合わせて搬送装置1を対象物X1まで移動させるか、又は曲線の軌道を描くようにして搬送装置1を対象物X1まで移動させるか、を決定する。そして、制御システム3は、決定した態様に基づいて、搬送装置1を対象物X1まで移動させる。これにより、搬送装置1は、対象物X1の下方に潜り込んだ状態となる。搬送装置1の移動が終わると、制御システム3は、昇降機構13を制御することにより、各昇降板22を上昇させる。これにより、搬送装置1は、対象物X1を持ち上げて保持した状態となる。
そして、制御システム3は、搬送処理を実行する。制御システム3は、駆動部12を制御することにより、対象物X1を保持した搬送装置1を、上位システム4により設定された移動経路C1に沿って目的地まで移動させる。
(3.1)第1動作例
次に、本実施形態の移動体制御システム100の第1動作例について説明する。第1動作例は、基本動作例における第1推定処理において、複数の特徴部X10(車輪)のうち一部の特徴部X10しか認識できない場合の動作の一例を示す。
次に、本実施形態の移動体制御システム100の第1動作例について説明する。第1動作例は、基本動作例における第1推定処理において、複数の特徴部X10(車輪)のうち一部の特徴部X10しか認識できない場合の動作の一例を示す。
例えば、図5A及び図5Bに示すように、搬送装置1の検知部11(センサ110)は、検知部11を頂点とした所定の角度で規定される領域に向けて、光(レーザ光)を投射する。図5A及び図5Bにおいて、センサ110から延びる破線は、センサ110から投射される光を表している。後述する図6においても同様である。そして、検知部11は、投射した光が特徴部X10にて反射した場合、反射光に基づいて特徴部X10までの距離を測定する、つまり特徴部X10を認識することが可能である。
ここで、例えば図5Aに示すように、検知部11と、複数(ここでは、2つ)の特徴部X10とが直線上に並んでいる場合、検知部11から投射された光は、複数の特徴部X10のうち検知部11側にある特徴部X10にて反射する。この場合、複数の特徴部X10のうち他の特徴部X10では、検知部11側にある特徴部X10により光を遮られることになる。つまり、この場合、検知部11は、複数の特徴部X10のうち一部の特徴部X10(ここでは、検知部11側の特徴部X10)からの反射光しか受光できず、結果として一部の特徴部X10しか認識することができない。
そこで、第1動作例では、制御システム3は、第2制御処理を実行する。つまり、第1動作例においては、制御システム3は、検知部11の検知結果に基づいて、複数の特徴部X10のうちの一部の特徴部X10を認識すると、搬送装置1を制御する。本動作例では、制御システム3は、第2制御処理の一例として、全ての特徴部X10を認識可能であると推定される位置まで搬送装置1を移動させる処理を実行する。つまり、制御処理(第2制御処理)は、対象物X1の複数の特徴部X10の全てを認識可能な位置まで搬送装置(移動体)1を移動させるサブ処理を含んでいる。
以下、本実施形態の移動体制御システム100の第1動作例の一連の流れについて、図4を用いて説明する。図4に示すフローチャートでは、ステップS16:Yes,S15,S18の処理、又はステップS16:No,S17a~S17d,S15,S18の処理が第2制御処理に相当する。図4に示す第1動作例は、搬送装置1がパレット置場の近傍に設定された目標ノードC0に到達した時点から開始される。
まず、搬送装置1が目標ノードC0に到達すると、制御システム3は、既に述べたように搬送装置1を停止させて搬送装置1を待機させる(S10)。そして、制御システム3の動作モードが単独モードに移行する。その後、制御システム3は、取得処理を実行することにより、検知部11(センサ110)の検知結果を取得する(S11)。これにより、制御システム3は、対象物X1の1以上の特徴部X10に関する検知部11の検知結果を取得することになる。
次に、制御システム3は、第1推定処理を実行する。つまり、制御システム3は、検知部11の検知結果に基づいて、対象物X1の全ての特徴部X10の認識を試みる(S12)。そして、制御システム3は、第1推定処理と並行して第2推定処理を実行する。つまり、制御システム3は、第1推定処理での特徴部X10の認識結果に基づいて、記憶部31に記憶されている複数のテンプレートから一致するテンプレートを検索することで、対象物X1の種類を推定する(S13)。
ここで、第1推定処理において、制御システム3が全ての特徴部X10を認識できた場合(S14:Yes)、制御システム3は、全ての特徴部X10の認識結果に基づいて、対象物X1の位置及び向きを推定する(S15)。また、第1推定処理において、一部の特徴部X10しか認識できないが(S14:No)、一部の特徴部X10の認識結果に基づいて対象物X1の位置及び向きを推定可能な場合(S16:Yes)、制御システム3は、対象物X1の位置及び向きを推定する(S15)。このような状況は、複数の特徴部X10の過半数(例えば、4つの車輪のうちの3つの車輪)を認識できており、より好適には、これらの特徴部X10の状態が同じ(例えば、3つの車輪の向きが揃っている)場合等に生じ得る。
一方、第1推定処理において、一部の特徴部X10しか認識できず(S14:No)、かつ、一部の特徴部X10の認識結果のみでは対象物X1の位置及び向きを推定できない場合(S16:No)、制御システム3は、サブ処理を実行する。このような状況は、複数の特徴部X10の半分以下(例えば、4つの車輪のうちの2つの車輪)しか認識できない場合等に生じ得る。
サブ処理において、制御システム3は、一部の特徴部X10の認識結果に基づいて、全ての特徴部X10を認識可能な位置(以下、「認識可能位置」ともいう)を推定する(S17a)。そして、制御システム3は、推定した認識可能位置まで搬送装置1を移動させる(S17b)。
例えば、図5Aに示すように、検知部11(センサ110)は、複数(ここでは、4つ)の特徴部X10(車輪)のうち、検知部11側の2つの特徴部X10からの反射光を受光している、と仮定する。この場合、制御システム3は、認識している検知部11側の2つの特徴部X10を結ぶ線分の中心を通る法線A10上であって、対象物X1から所定の距離だけ離れた領域A1を、認識可能位置として推定する。そして、制御システム3は、図5Bに示すように、認識可能位置まで搬送装置1を移動させる。
具体的には、制御システム3は、まずセンサ110が領域A1の方を向くように、搬送装置1を旋回(ここでは、右旋回)させる。そして、制御システム3は、搬送装置1の中心が領域A1の中心と殆ど一致するまで、搬送装置1を前進させる。その後、制御システム3は、センサ110が法線A10上に位置するまで、搬送装置1を旋回(ここでは、左旋回)させる。このように、制御システム3は、旋回及び前進を組み合わせて搬送装置1を移動させることにより、領域A1(つまり、認識可能位置)まで搬送装置1を移動させる。そして、認識可能位置においては、検知部11(センサ110)から投射した光は、全ての特徴部X10に届き得る。このため、制御システム3は、搬送装置1が認識可能位置にある状態にて、再度、取得処理(S11)及び第1推定処理(S12)を実行することにより、全ての特徴部X10を認識することが可能となる。なお、依然として検知部11により全ての特徴部X10を認識できない場合、制御システム3は、サブ処理(S17a~S17d)を実行することで、認識可能位置を変更すればよい。
そして、対象物X1の位置及び向きを推定した後においては、制御システム3は、基本動作例と同様に、保持処理及び搬送処理を順次実行する。つまり、制御システム3は、搬送装置1を目標地点(つまり、対象物X1)まで移動させる(S18)。
本動作例では、対象物X1の全ての特徴部X10を認識した場合に初めて搬送装置(移動体)1を移動させる方法(第1比較例の移動体制御方法)と比較して、以下のような利点がある。すなわち、第1比較例の移動体制御方法では、全ての特徴部X10を認識できるように、検知部11に用いるセンサ110の数を増やす等して、搬送装置1の認識精度を向上させる対策が必要となり得る。また、第1比較例の移動体制御方法では、全ての特徴部X10を認識しやすくなるように、対象物X1の配置に工夫を凝らす対策が必要となり得る。
これに対して、本動作例では、搬送装置1が自律走行可能であることを活用している。つまり、本動作例では、一部の特徴部X10を認識した時点で、特徴部X10を認識しやすい位置(認識可能位置)に搬送装置1を移動させる等、上記の対策をとらずとも、搬送装置1を対象物X1まで移動させるための何らかの措置をとることが可能である。つまり、本動作例では、搬送装置1を対象物X1までスムーズに移動させやすい、という利点がある。
ここで、搬送装置1が対象物X1を搬送する前段階において、対象物X1が機械により所定位置に配置される場合、対象物X1は、機械により概ね正確な位置及び向きで所定位置に配置される。この場合、搬送装置1は、目標ノードC0に到達した後、前進するだけで対象物X1の下方に潜り込むことが可能である。一方、対象物X1が人により予め設定された位置に配置される場合、対象物X1は、運搬する人の運搬作業に対する丁寧さ等に応じて、所定位置から外れて配置されたり、所定位置から傾いて配置されたりする。この場合、搬送装置1は、目標ノードC0に到達した後、前進するだけでは対象物X1の下方に潜り込めない状況が生じ得る。
本動作例では、後者の場合においても、搬送装置1は、目標ノードC0に到達した後に対象物X1の下方に潜り込むことが可能である。つまり、本動作例では、対象物X1を所定位置まで運搬する人に対して、対象物X1を配置する精度を要求しなくて済む、という利点もある。
ところで、本動作例では、制御システム3は、サブ処理の実行中においても取得処理及び第1推定処理を随時実行している。このため、制御システム3は、搬送装置1を認識可能位置まで移動させている途中で、対象物X1の位置及び向きを推定できる場合がある。このような場合(S17c:Yes)、制御システム3は、サブ処理の実行中であっても、対象物X1の位置及び向きを推定できた時点で(S15)、サブ処理を中断して保持処理及び搬送処理を実行する、つまり搬送装置1を対象物X1まで移動させてもよい(S18)。なお、サブ処理の実行中において対象物X1の位置及び向きを推定できない場合は(S17c:No)、制御システム3は、搬送装置1が認識可能位置への移動を完了するまで(S17d:No)、搬送装置1の移動を継続する(S17b)。一方、搬送装置1が認識可能位置への移動を完了すると(S17d:Yes)、制御システム3は、再度、取得処理(S11)及び第1推定処理(S12)を実行する。
つまり、制御処理(第2制御処理)は、搬送装置(移動体)1を対象物X1まで移動させるメイン処理(S18)を含んでいる。そして、メイン処理は、サブ処理の途中において、対象物X1の位置及び向きを推定すると(S17c:Yes,S15)、実行されてもよい。
このように、メイン処理は、保持処理の一部(つまり、搬送装置1を対象物X1の下方に進入させる処理)を兼ねていることになる。したがって、制御システム3は、メイン処理を実行する場合、保持処理においては、搬送装置1に対象物X1を持ち上げさせて対象物X1を搬送装置1に保持させる処理のみを実行すればよい。
メイン処理(S18)は、第2制御処理がステップS16:Yes,S15の処理を含む場合にも実行される。具体的には、メイン処理は、全ての特徴部X10を認識するのではなく、一部の特徴部X10のみで対象物X1の位置及び向きを推定できる場合にも実行される。つまり、制御処理(第2制御処理)は、メイン処理を含んでいる。そして、メイン処理は、一部の特徴部X10の認識結果に基づいて対象物X1の位置及び向きを推定すると実行されてもよい。
ところで、メイン処理においては、制御システム3は、旋回及び前進を組み合わせて搬送装置1を対象物X1の下方に進入させてもよいし、図6に示すように、曲線の軌道を描くようにして搬送装置1を対象物X1の下方に進入させてもよい。図6に示す例では、制御システム3は、認識可能位置まで搬送装置1を移動させずに、直接、対象物X1の下方の領域A2に搬送装置1を移動させている。つまり、メイン処理は、搬送装置(移動体)1を曲線の軌道を描くように移動させる処理を含んでいてもよい。
(3.2)第2動作例
次に、本実施形態の移動体制御システム100の第2動作例について説明する。第2動作例は、基本動作例における保持処理において、搬送装置1を対象物X1まで移動させている途中における動作の一例を示す。
次に、本実施形態の移動体制御システム100の第2動作例について説明する。第2動作例は、基本動作例における保持処理において、搬送装置1を対象物X1まで移動させている途中における動作の一例を示す。
例えば、搬送装置1を対象物X1まで移動させている途中において、対象物X1が移動する可能性がある。本開示でいう「対象物の移動」とは、第1推定処理で推定した対象物X1の位置及び向きがずれる程度の移動を含む。したがって、対象物X1の移動には、対象物X1全体が移動する態様の他、対象物X1の一部(特徴部X10)のみが移動する態様を含み得る。対象物X1の移動は、一例として、作業者が対象物X1に触れる等して外力を受ける場合の他、対象物X1の配置面の状況(配置面が傾いている等)に応じて対象物X1が重力に従って自然と移動する場合に起こり得る。
一例として、図7に示すように、対象物X1がロールボックスパレットである場合、対象物X1の移動は、ロールボックスパレット全体が移動する態様の他、ロールボックスパレットの車輪(特徴部X10)がその場で回転することで位置がずれる態様を含み得る。この場合の車輪は、いわゆる自在輪である。自在輪とは、進行方向が固定されておらず、自由に変更することが可能な車輪である。自在輪は、ロールボックスパレットの本体に取り付けられている箇所を中心として回転可能に構成されている。このため、自在輪が回転することで、対象物X1全体の位置が変更されなくとも、特徴部X10の位置が変更されることが生じ得る。
そして、搬送装置1を対象物X1まで移動させている途中において、対象物X1が移動した場合、対象物X1は、第1推定処理で推定した位置及び向きからずれることになる。この場合、制御システム3が搬送装置1を対象物X1まで移動させ続けると、対象物X1が推定した位置及び向きからずれているため、搬送装置1が対象物X1まで到達しなかったり、搬送装置1が対象物X1に衝突したりする可能性がある。つまり、制御システム3は、搬送装置1を対象物X1まで移動させる(ここでは、搬送装置1を対象物X1の下方に進入させる)という目的を達成できない可能性がある。
そこで、第2動作例では、制御システム3は、移動判定処理を実行する。つまり、第2動作例においては、制御システム3は、搬送装置1を対象物X1まで移動させる途中において、対象物X1の移動の有無を判定する。本動作例では、制御システム3は、検知部11(センサ110)の検知結果を随時取得する(つまり、取得処理を随時実行する)ことにより、対象物X1の複数の特徴部X10(車輪)を監視し続ける。そして、制御システム3は、複数の特徴部X10のうちの1以上の特徴部X10の動きに基づいて、対象物X1の移動の有無を判定する。つまり、移動判定処理は、対象物X1に含まれる複数の監視対象(特徴部X10)のうちの1以上の監視対象の動きに基づいて、対象物X1の移動の有無を判定する。
また、第2動作例においては、制御システム3は、第3制御処理を実行する。つまり、第2動作例においては、制御システム3は、移動判定処理にて対象物X1の移動があると判定された場合に、搬送装置1を制御する。本動作例では、制御システム3は、第3制御処理の一例として、対象物X1に対する搬送装置1の軌道を修正してから、再度、搬送装置1を対象物X1まで移動させる処理を試みる。つまり、制御処理(第3制御処理)は、対象物X1に対する搬送装置(移動体)1の軌道を修正し、修正した軌道にて搬送装置1を対象物X1まで移動させるリトライ処理を含んでいる。
以下、本実施形態の移動体制御システム100の第2動作例の一連の流れについて、図8~図15Cを用いて説明する。図8に示すフローチャートでは、ステップS21,S23~S26の処理が移動判定処理に相当し、ステップS27,S28の処理が第3制御処理に相当する。図8に示す第2動作例は、制御システム3が、第1推定処理により対象物X1の位置及び向きの推定を完了した時点から開始される。
まず、対象物X1の位置及び向きの推定が完了すると、制御システム3は、既に述べたように、保持処理を開始する。つまり、制御システム3は、対象物X1の位置、向き、及び種類の推定結果に基づいて、対象物X1の位置(ここでは、対象物X1の下方の位置)を目標地点に設定し、搬送装置1を対象物X1まで移動させる処理を開始する。このとき、制御システム3は、保持処理を開始する前に、監視領域B1(図9参照)の設定を行う(S21)。
具体的には、制御システム3は、図9に示すように、第1推定処理にて認識した複数の特徴部X10の各々について、監視領域B1を設定する。本開示でいう「監視領域」は、特徴部X10の全体を含む一定の領域である。つまり、監視領域B1の数は、複数の特徴部X10の数と一致する。また、本開示でいう「監視領域の設定」は、制御システム3が、特徴部X10の位置(座標)を含む一定の範囲(つまり、監視領域B1)を監視対象とすることである。つまり、監視対象の数は、複数の特徴部X10の数と一致する。
監視領域B1の設定が完了すると、制御システム3は、搬送装置1の対象物X1への移動を開始させる(S22)。搬送装置1が対象物X1まで移動している途中において、制御システム3は、検知部11(センサ110)の検知結果を随時取得する(つまり、取得処理を随時実行する)(S23)。そして、制御システム3は、検知部11の検知結果に基づく複数の特徴部X10の位置が、対応する監視領域B1に収まっているか否かを随時監視する(S24)。つまり、移動判定処理は、搬送装置(移動体)1の有する検知部11の検知結果に基づいて、対象物X1の移動の有無を判定する。
具体的には、制御システム3は、所定数以上の監視領域B1に対応する特徴部X10が収まっているか否かを監視する(S25)。ここで、本実施形態では、複数の特徴部X10(車輪)は、いずれも自在輪である。つまり、1以上の監視対象は、自在輪を含んでいる。このため、本実施形態では、対象物X1全体が移動する場合の他、自在輪が回転する場合においても、監視領域B1から対応する特徴部X10が外れる可能性がある(図10及び図11参照)。
本動作例では、制御システム3は、監視領域B1に収まっている特徴部X10の数が、複数の特徴部X10の数の半分を上回っていれば、対象物X1が移動していないと判定する。一方、制御システム3は、監視領域B1に収まっている特徴部X10の数が、複数の特徴部X10の数の半分以下であれば、対象物X1が移動していると判定する。
図10に示す例では、4つの監視領域B1のうち3つの監視領域B1の各々に特徴部X10が収まっている。したがって、図10に示す例では、監視領域B1に収まっている特徴部X10の数が「3」であり、複数の特徴部X10の数である「4」の半分を上回っているため、制御システム3は、対象物X1が移動していないと判定する。一方、図11に示す例では、4つの監視領域B1のうち2つの監視領域B1の各々に特徴部X10が収まっている。したがって、図11に示す例では、監視領域B1に収まっている特徴部X10の数が「2」であり、複数の特徴部X10の数である「4」の半分以下であるため、制御システム3は、対象物X1が移動していると判定する。
図8に示すように、所定数以上の監視領域B1に対応する特徴部X10が収まっている場合(S25:Yes)、制御システム3は、搬送装置1を対象物X1へ移動させ続ける(S22)。一方、所定数以上の監視領域B1に対応する特徴部X10が収まっていない場合(S25:No)、制御システム3は、対象物X1が移動していると判定する(S26)。そして、制御システム3は、搬送装置1の軌道を修正せずとも、搬送装置1の対象物X1への移動を継続可能であるか否かを判定する(S27)。
具体的には、制御システム3は、図12及び図13に示すように、設定した目標地点(二点鎖線で囲まれた領域)に、少なくとも一部の特徴部X10が重なるか否かを判定することで、搬送装置1の対象物X1への移動を継続可能であるか否かを判定する。図12に示す例では、設定した目標地点にいずれの特徴部X10も重なっていないため、制御システム3は、搬送装置1の対象物X1への移動を継続可能である、と判定する。一方、図13に示す例では、設定した目標地点に特徴部X10が重なっているため、制御システム3は、搬送装置1の対象物X1への移動を継続できない、と判定する。
図8に示すように、搬送装置1の対象物X1への移動を継続可能であると判定した場合(S27:Yes)、制御システム3は、搬送装置1を対象物X1へ移動させ続ける(S22)。一方、搬送装置1の対象物X1への移動を継続できないと判定した場合(S27:No)、制御システム3は、リトライ処理を実行する(S28)。本動作例では、制御システム3は、リトライ処理として2つの処理(第1リトライ処理及び第2リトライ処理)を実行し得る。
第1リトライ処理は、搬送装置1を目標地点への移動を開始する前の地点まで復帰させ、その後、取得処理及び第1推定処理を経て、再度、目標地点を設定し直して搬送装置1を対象物X1まで移動させる処理である。つまり、リトライ処理は、軌道を修正する前に、搬送装置(移動体)1が対象物X1への移動を開始した位置まで搬送装置1を復帰させる処理を含んでいる。
第1リトライ処理の具体例について図14A~図14Dを用いて説明する。図14A~図14Dに示す例では、搬送装置1が対象物X1へ移動している途中で、対象物X1全体が移動する、と仮定する。図14Aは、搬送装置1が対象物X1への移動を開始した時点を表している。この時点では、対象物X1は移動していない。図14Bは、搬送装置1が対象物X1へ移動している途中で、対象物X1が移動した状態を表している。この時点において、制御システム3は、移動判定処理により対象物X1が移動している、と判定する。図14Cは、制御システム3が第1リトライ処理を実行することにより、目標地点への移動を開始する前の地点(つまり、図14Aにおいて搬送装置1のいる地点)まで搬送装置1を復帰させた状態を表している。図14Dは、制御システム3が第1リトライ処理を実行することにより、目標地点を移動後の対象物X1がある位置に設定し直して、再度、搬送装置1を対象物X1へ移動させる処理を開始した時点を表している。第1リトライ処理は、例えば、対象物X1の移動があると判定した地点からでは軌道を修正することが困難な場合に実行され得る。
第2リトライ処理は、対象物X1の移動があると判定した地点において、取得処理及び第1推定処理を経て、再度、目標地点を設定し直して搬送装置1を対象物X1まで移動させる処理である。つまり、リトライ処理は、対象物X1の移動に追従するように搬送装置(移動体)1を対象物X1まで移動させる処理を含んでいる。
第2リトライ処理の具体例について図15A~図15Cを用いて説明する。図15A~図15Cに示す例では、搬送装置1が対象物X1へ移動している途中で、対象物X1全体が移動する、と仮定する。図15Aは、搬送装置1が対象物X1への移動を開始した時点を表している。この時点では、対象物X1は移動していない。図15Bは、搬送装置1が対象物X1へ移動している途中で、対象物X1が移動した状態を表している。この時点において、制御システム3は、移動判定処理により対象物X1が移動している、と判定する。図15Cは、制御システム3が第2リトライ処理を実行することにより、目標地点を移動後の対象物X1がある位置に設定し直して、再度、搬送装置1を対象物X1へ移動させる処理を開始した時点を表している。このように、第2リトライ処理では、第1リトライ処理とは異なり、目標地点への移動を開始する前の地点まで搬送装置1を復帰させる処理を実行しない。第2リトライ処理は、例えば、対象物X1の移動があると判定した地点からでも十分に軌道を修正することが可能である場合に実行され得る。
本動作例では、対象物X1の移動の有無に依らず、搬送装置(移動体)1を対象物X1まで移動させ続ける方法(第2比較例の移動体制御方法)と比較して、以下のような利点がある。すなわち、第2比較例の移動体制御方法では、対象物X1が移動により推定した位置及び向きからずれていたとしても、搬送装置1を対象物X1まで移動させ続ける。このため、第2比較例の移動体制御方法では、搬送装置1が対象物X1まで到達しなかったり、搬送装置1が対象物X1に衝突したりする等、搬送装置1を対象物X1まで移動させるという目的を達成できない可能性がある。
これに対して、本動作例では、対象物X1の移動があると判定した時点で、搬送装置1の軌道の修正等、何らかの措置をとることが可能である。このため、本動作例では、第2比較例の移動体制御方法のように搬送装置1が対象物X1まで到達しなかったり、搬送装置1が対象物X1に衝突したりする等といった障害が生じにくく、搬送装置1を対象物X1まで移動させるという目的を達成しやすい。つまり、本動作例では、搬送装置(移動体)1を対象物X1までスムーズに移動させやすい、という利点がある。
ところで、本動作例では、制御システム3は、リトライ処理を実行する代わりに、又はリトライ処理と並行して、対象物X1の移動があったことを報知する報知処理を実行してもよい。つまり、制御処理(第3制御処理)は、対象物X1の移動があったことを報知する処理を含んでいてもよい。報知処理において、制御システム3は、例えば搬送装置1に備え付けのスピーカから報知用メッセージを出力させることにより、対象物X1の移動があったことを周囲に報知してもよい。この場合、報知用メッセージを聞いた作業員は、対象物X1を元の位置に戻す等の措置をとることが可能である。また、報知処理において、制御システム3は、対象物X1の移動があったことを、通信部32を介して上位システム4へ報知してもよい。この場合、上位システム4の管理者は、自ら現場に向かったり、現場に作業員を派遣するように指示を行ったりすることで、対象物X1を元の位置に戻す等の措置をとることが可能である。
また、本動作例では、制御システム3は、移動判定処理にて対象物X1の移動があることを判定し、かつ、対象物X1が目標地点から所定距離以上離れた位置まで移動した場合、搬送装置1を停止させてもよい。つまり、制御処理(第3制御処理)は、対象物X1が所定の領域から外れた場合、搬送装置(移動体)1の対象物X1までの移動を停止させる処理を含んでいてもよい。この態様では、他の搬送装置1が管轄するエリアに搬送装置1が進入して他の搬送装置1の動作を妨げるのを防ぎやすい、という利点がある。
また、この態様では、制御システム3は、対象物X1がどの方向に向かって移動したかを検知してもよい。つまり、制御処理(第3制御処理)は、対象物X1が所定の領域から外れた方向を検知する処理を含んでいてもよい。この処理は、例えば、検知部11(センサ110)の検知結果に基づいて特徴部X10の位置を追跡することで実行可能である。この態様では、移動後の対象物X1の位置を把握しやすい、という利点がある。また、この態様では、他の搬送装置1が管轄するエリアに対象物X1が移動したと判定した場合、制御システム3は、その旨を通信部32を介して上位システム4へ通知してもよい。この態様では、上位システム4は、他の搬送装置1に対して、移動した対象物X1の搬送を指示することが可能である。
また、制御システム3は、移動判定処理の判定結果に応じて、第3制御処理で実行する処理(リトライ処理、又は報知処理等)を決定してもよい。つまり、制御処理(第3制御処理)の内容は、対象物X1の移動の態様に応じて決定されてもよい。移動判定処理においては、対象物X1の移動、移動する方向、移動する速度の他、対象物X1の検知可能なエリアからの逸脱等を判定することが可能である。
(3.3)第3動作例
次に、本実施形態の移動体制御システム100の第3動作例について説明する。第3動作例は、基本動作例における搬送処理において、搬送装置1が対象物X1を保持して目的地まで搬送する途中における動作の一例を示す。
次に、本実施形態の移動体制御システム100の第3動作例について説明する。第3動作例は、基本動作例における搬送処理において、搬送装置1が対象物X1を保持して目的地まで搬送する途中における動作の一例を示す。
搬送装置1が対象物X1を保持して目的地まで搬送する途中においては、方向転換を行うために搬送装置1が旋回する場合がある。図16に示す例では、搬送装置1は、対象物X1の下方に進入した状態で対象物X1を持ち上げることで対象物X1を保持した後に、元の位置(目標ノードC0)に戻った上で移動経路C1に沿って目的地へと移動する。ここで、移動経路C1には、対象物X1が配置され、かつ、搬送装置1が移動することを許容されたエリアC10を含んでいる。エリアC10は、一例としてパレット置場である。このようなエリアC10は、移動面200上に複数設定され得る。図16に示す例では、3つのエリアC10が移動面200上に設定されている。
図16に示す例では、搬送装置1は、3つのエリアC10のうち中央のエリアC10に配置されている対象物X1を搬送している。ここで、既に述べたように、対象物X1は、例えば人によりエリアC10に配置される場合、運搬する人の運搬作業に対する丁寧さ等に応じて、所定位置D1から外れて配置されたり、所定位置D1から傾いて配置されたりする。図16に示す例では、対象物X1は、所定位置D1からずれた位置に配置されている。この場合、対象物X1を保持した搬送装置1が、対象物X1を保持した地点で旋回すると、対象物X1がエリアC10(つまり、移動経路C1)から隣のエリアC10にはみ出す可能性がある。この場合、対象物X1が隣のエリアC10にある他の対象物X1又は設備等に接触する可能性がある。
そこで、第3動作例では、制御システム3は、判定処理を実行する。つまり、第3動作例においては、制御システム3は、対象物X1を搬送している状態にある搬送装置(移動体)1について、対象物X1を含めて搬送装置1が通過することを許容されている移動経路C1からのはみ出しが生じるか否かを判定する。ここで、判定処理は、例えば現時点で移動経路C1からのはみ出しが生じるか否かを判定する他、現時点から数十秒、又は数分後に移動経路C1からのはみ出しが生じるか否かを判定してもよい。
本動作例では、制御システム3は、搬送装置1が対象物X1を保持した状態で旋回している途中において、対象物X1を含めた搬送装置1がエリアC10からはみ出すか否かを判定する。つまり、判定処理は、搬送装置(移動体)1の旋回時においてエリアC10(移動経路C1)からのはみ出しが生じるか否かを判定する処理を含んでいる。
また、第3動作例においては、制御システム3は、第1制御処理を実行する。つまり、第3動作例においては、制御システム3は、判定処理にてエリアC10(移動経路C1)からのはみ出しが生じると判定すると、搬送装置(移動体)1を制御する。本動作例では、制御システム3は、第1制御処理の一例として、対象物X1を含む搬送装置1がエリアC10からはみ出さないように軌道を修正する調整処理を試みる。つまり、制御処理(第1制御処理)は、エリアC10(移動経路C1)からはみ出さないように搬送装置(移動体)1の旋回時における旋回中心の位置を調整する処理を含んでいる。
以下、本実施形態の移動体制御システム100の第3動作例の一連の流れについて、図17及び図18を用いて説明する。図17に示すフローチャートでは、ステップS32,S33の処理が判定処理に相当し、ステップS34の処理が第1制御処理に相当する。図17に示す第3動作例は、制御システム3が、保持処理を完了した時点、つまり搬送装置1が対象物X1を持ち上げて保持した時点から開始される。
まず、保持処理が完了すると、制御システム3は、既に述べたように、搬送処理を開始する。つまり、制御システム3は、搬送装置1を移動経路C1に沿って目的地まで移動させる処理を開始する(S31)。搬送装置1が目的地まで移動している途中において、制御システム3は、検知部11の検知結果を随時取得する。ここで取得する検知部11の検知結果は、センサ110の検知結果ではなく、駆動輪の回転数等である。つまり、制御システム3は、検知部11の検知結果を随時取得することにより、本体部2(搬送装置1)の位置を監視し続ける。
ここで、制御システム3は、既に完了した第2推定処理により、対象物X1の種類を推定している。このため、制御システム3は、搬送装置1に保持されている対象物X1の形状及びサイズ等を把握していることになる。したがって、制御システム3は、検知部11の検知結果及び第2推定処理の推定結果に基づいて、対象物X1を含めた搬送装置1が占める領域を監視し続けることが可能である。そして、制御システム3は、対象物X1を含めた搬送装置1が占める領域が、エリアC10に収まっているか否かを随時判定する(S32)。つまり、判定処理は、対象物X1の形状及び大きさに基づいて、エリアC10(移動経路C1)からのはみ出しが生じるか否かを判定する。
対象物X1を含めた搬送装置1が占める領域がエリアC10に収まっている、つまりエリアC10からはみ出さない場合(S33:No)、制御システム3は、搬送装置1を目的地へ移動させ続ける(S31)。一方、対象物X1を含めた搬送装置1が占める領域がエリアC10に収まっていない、つまりエリアC10からはみ出す場合(S33:Yes)、制御システム3は、調整処理を実行することにより、搬送装置1の位置を調整する(S34)。
以下、調整処理の具体例について図18A及び図18Bを用いて説明する。図18Aは、搬送装置1が旋回(左旋回)している途中において、対象物X1がエリアC10からはみ出す直前の状態を表している。この時点において、制御システム3は、判定処理により移動経路C1(エリアC10)からのはみ出しが生じ得る、と判定している。すると、制御システム3は、搬送装置1が旋回してもエリアC10からはみ出さない位置まで搬送装置1を移動させることで、搬送装置1の旋回中心の位置を調整する。図18Bでは、制御システム3は、搬送装置1をエリアC10の幅方向の中央部まで後進させることにより、搬送装置1の旋回中心の位置を調整している。調整処理が完了すると、制御システム3は、搬送装置1の目的地への移動を再開させる(S31)。
本動作例では、移動経路C1からのはみ出しを考慮せずに搬送装置1を移動させる方法(第3比較例の移動体制御方法)と比較して、以下のような利点がある。すなわち、第3比較例の移動体制御方法では、対象物X1がエリアC10(移動経路C1)からはみ出しても搬送装置1を移動させ続けるため、隣のエリアC10にある他の対象物X1又は設備等に接触する可能性がある。このような状況を回避するために、エリアC10の幅を広げることも考えられるが、施設内の移動面200の面積を考慮するとエリアC10の幅を広げることには限界がある。また、エリアC10の幅を広げると、移動面200上に設定し得るエリアC10の数が減ることになり、結果として対象物X1を配置可能な場所が減ってしまう。
これに対して、本動作例では、対象物X1が移動経路C1からのはみ出しがあると判定した時点で、搬送装置1の軌道の修正等、何らかの措置をとることが可能である。このため、本動作例では、第3比較例の移動体制御方法のように対象物X1が隣のエリアC10にある他の対象物X1又は設備等に接触するといった障害が生じにくい。つまり、本動作例では、対象物X1を保持した状態で搬送装置(移動体)1をスムーズに移動させやすい、という利点がある。また、本動作例では、エリアC10の幅を広げる必要がないので、エリアC10の幅を広げた場合に生じ得る問題も起こり得ない、という利点もある。
ところで、本動作例では、制御システム3は、調整処理を実行する代わりに、移動経路C1を変更する処理を実行してもよい。具体的には、制御システム3は、判定処理にて搬送装置1が現在の移動経路C1からはみ出すと判定した場合、搬送装置1がはみ出さずに移動可能な経路を探索し、探索した経路を新たな移動経路C1として設定してもよい。つまり、制御処理(第1制御処理)は、搬送装置(移動体)1がはみ出すことなく移動可能な経路に移動経路C1を変更する処理を含んでいてもよい。
また、本動作例では、制御システム3は、調整処理を実行する代わりに、又は調整処理と並行して、移動経路C1からのはみ出しが生じることを報知する報知処理を実行してもよい。つまり、制御処理(第1制御処理)は、移動経路C1からのはみ出しが生じることを報知する処理を含んでいてもよい。報知処理において、制御システム3は、例えば搬送装置1に備え付けのスピーカから報知用メッセージを出力させることにより、移動経路C1からのはみ出しが生じ得ることを周囲に報知してもよい。この場合、報知用メッセージを聞いた作業員は、移動経路C1に隣接するエリアにある他の対象物X1又は設備等を移動経路C1から一時的に遠ざける等の措置をとることが可能である。また、報知処理において、制御システム3は、移動経路C1からのはみ出しが生じ得ることを、通信部32を介して上位システム4へ報知してもよい。この場合、上位システム4の管理者は、自ら現場に向かったり、現場に作業員を派遣するように指示を行ったりすることで、移動経路C1に隣接するエリアにある他の対象物X1又は設備等を移動経路C1から一時的に遠ざける等の措置をとることが可能である。
上記のエリアC10では、搬送装置1の旋回が許可されているが、移動経路C1によっては、搬送装置1の旋回が許可されていない場合もある。そこで、本動作例では、制御システム3は、移動経路C1において旋回を許可されているか否かに応じて、旋回を含めた調整処理を実行するか、又は搬送装置1を停止させて報知処理を実行するか等、第1制御処理の内容を決定してもよい。つまり、制御処理(第1制御処理)は、搬送装置(移動体)1の旋回が許可されているか否かの情報に基づいて、搬送装置1を旋回させるか否かを決定する処理を含んでいてもよい。
また、本動作例では、制御システム3は、例えば上位システム4により、あらかじめ移動経路C1からのはみ出しを許可されている場合、判定処理の結果に依らず、搬送装置1の目的地への移動を継続させてもよい。つまり、制御処理(第1制御処理)は、所定の許可条件を満たす場合、判定処理の判定結果に依らず、移動経路C1からのはみ出しを許可する処理を含んでいてもよい。上位システム4は、例えば、隣のエリアC10(移動経路C1)に対象物X1等が配置されておらず、空きがある場合(つまり、所定の条件を満たす場合)、制御システム3に対して移動経路C1からのはみ出しを許可する。
また、本動作例では、制御システム3は、第1制御処理を実行せずに、通信部32を介して判定処理の結果を上位システム4へ通知してもよい。つまり、制御システム3は、判定処理の結果を、搬送装置(移動体)1を遠隔で制御する上位システム4に出力する出力処理を更に実行してもよい。この態様では、判定結果を受けた上位システム4は、例えば移動経路C1に隣接する他の移動経路C1において、対応する他の搬送装置1の移動を一時的に禁止する等の指令を、他の搬送装置1に通知する等の措置をとることが可能である。
(4)変形例
上述の実施形態は、本開示の様々な実施形態の一つに過ぎない。上述の実施形態は、本開示の目的を達成できれば、設計等に応じて種々の変更が可能である。また、上述の実施形態に係る移動体制御方法及び移動体制御システム100と同様の機能は、コンピュータプログラム、又はコンピュータプログラムを記録した非一時的記録媒体等で具現化されてもよい。
上述の実施形態は、本開示の様々な実施形態の一つに過ぎない。上述の実施形態は、本開示の目的を達成できれば、設計等に応じて種々の変更が可能である。また、上述の実施形態に係る移動体制御方法及び移動体制御システム100と同様の機能は、コンピュータプログラム、又はコンピュータプログラムを記録した非一時的記録媒体等で具現化されてもよい。
一態様に係るプログラムは、1以上のプロセッサに、上記の移動体制御方法(取得処理及び第1制御処理を含む)を実行させるためのプログラムである。また、一態様に係るプログラムは、1以上のプロセッサに、上記の移動体制御方法(移動判定処理及び第2制御処理を含む)を実行させるためのプログラムである。また、一態様に係るプログラムは、1以上のプロセッサに、上記の移動体制御方法(判定処理及び第3制御処理を含む)を実行させるためのプログラムである。
以下、実施形態の変形例を列挙する。以下に説明する変形例は、適宜組み合わせて適用可能である。
本開示における移動体制御システム100において、制御システム3及び上位システム4等は、コンピュータシステムを含んでいる。コンピュータシステムは、ハードウェアとしてのプロセッサ及びメモリを主構成とする。コンピュータシステムのメモリに記録されたプログラムをプロセッサが実行することによって、本開示における制御システム3及び上位システム4としての機能が実現される。プログラムは、コンピュータシステムのメモリに予め記録されてもよく、電気通信回線を通じて提供されてもよく、コンピュータシステムで読み取り可能なメモリカード、光学ディスク、ハードディスクドライブ等の非一時的記録媒体に記録されて提供されてもよい。コンピュータシステムのプロセッサは、半導体集積回路(IC)又は大規模集積回路(LSI)を含む1ないし複数の電子回路で構成される。ここでいうIC又はLSI等の集積回路は、集積の度合いによって呼び方が異なっており、システムLSI、VLSI(Very Large Scale Integration)、又はULSI(Ultra Large Scale Integration)と呼ばれる集積回路を含む。更に、LSIの製造後にプログラムされる、FPGA(Field-Programmable Gate Array)、又はLSI内部の接合関係の再構成若しくはLSI内部の回路区画の再構成が可能な論理デバイスについても、プロセッサとして採用することができる。複数の電子回路は、1つのチップに集約されていてもよいし、複数のチップに分散して設けられていてもよい。複数のチップは、1つの装置に集約されていてもよいし、複数の装置に分散して設けられていてもよい。ここでいうコンピュータシステムは、1以上のプロセッサ及び1以上のメモリを有するマイクロコントローラを含む。したがって、マイクロコントローラについても、半導体集積回路又は大規模集積回路を含む1ないし複数の電子回路で構成される。
また、制御システム3及び上位システム4における複数の機能が、1つの筐体内に集約されていることは、移動体制御システム100に必須の構成ではない。つまり、制御システム3及び上位システム4の構成要素は、複数の筐体に分散して設けられていてもよい。さらに、制御システム3及び上位システム4の少なくとも一部の機能、例えば、上位システム4の一部の機能がクラウド(クラウドコンピューティング)等によって実現されてもよい。
上述の実施形態において、第1推定処理では、検知部11(センサ110)の検知結果と、カメラの撮像結果と、を用いて対象物X1の位置及び向きを推定してもよい。つまり、対象物X1の位置及び向きを推定するための処理(第1推定処理)では、搬送装置(移動体)1の周囲を撮像するカメラの撮像結果を更に用いてもよい。カメラは、例えば移動体制御システム100が採用される施設内に設置される。カメラは、施設内にある対象物X1を俯瞰できる位置に設置されるのが好ましい。この態様では、検知部11の検知結果のみを用いる場合と比較して、対象物X1の位置及び向きを推定する精度を向上することができる、という利点がある。なお、制御システム3は、初回の第1推定処理からカメラの撮像結果を用いてもよいし、2回目以降の第1推定処理から、つまり一部の特徴部X10しか認識できなかった場合にカメラの撮像結果を用いてもよい。
上述の実施形態において、検知部11は、LiDAR、ソナーセンサ及びレーダに限らず、例えば、ステレオカメラ又はモーションステレオカメラ等のセンサを含んでいてもよい。
上述の実施形態において、上位システム4は、移動体制御システム100に必須の構成ではなく、適宜省略可能である。この態様では、制御システム3が単独で搬送装置(移動体)1を制御すればよい。
上述の実施形態では、搬送装置1は、対象物X1を持ち上げることで搬送する態様であるが、これに限定する趣旨ではない。例えば、搬送装置1は、対象物X1を牽引することで搬送する態様、対象物X1を押すことで搬送する態様、対象物X1を掴むことで搬送する態様、又は対象物X1を吸着することで搬送する態様等であってもよい。
上述の実施形態において、搬送装置1は、例えばフィーダ交換用の台車を対象物X1として搬送する態様であってもよい。この態様では、搬送装置1は、台車を電子部品実装装置(マウンタ)まで搬送することで、台車を電子部品実装装置に装着してもよい。
上述の実施形態において、移動体1は、無人搬送車(AGV:Automated Guided Vehicle)、移動ロボット及びドローン等を含み得る。本開示でいう「移動ロボット」は、例えば、車輪型、又は無限軌道型のロボットである。また、移動体1は、対象物X1を搬送する機能を有していなくてもよく、例えば、ピッキング、溶接、実装、陳列、接客、警備、組立、又は検査等の作業を実行する機能を有していてもよい。
上述の実施形態において、制御システム3は、少なくとも制御処理を実行すればよく、その他の処理は実行しなくてもよい。一例として、判定処理は、制御システム3の判定部304で実行する代わりに、上位システム4にて実行されてもよい。この場合、上位システム4は、搬送装置(移動体)1から判定処理に必要な情報(搬送装置1に保持されている対象物X1の形状及びサイズ等)を取得すればよい。
(まとめ)
以上述べたように、第1の態様に係る移動体制御方法は、判定処理と、制御処理(第1制御処理)と、を有する。判定処理は、対象物(X1)を搬送している状態にある移動体(1)について、対象物(X1)を含めて移動体(1)が通過することを許容されている移動経路(C1)からのはみ出しが生じるか否かを判定する処理である。制御処理は、判定処理の結果に基づいて、移動体(1)を制御する処理である。
以上述べたように、第1の態様に係る移動体制御方法は、判定処理と、制御処理(第1制御処理)と、を有する。判定処理は、対象物(X1)を搬送している状態にある移動体(1)について、対象物(X1)を含めて移動体(1)が通過することを許容されている移動経路(C1)からのはみ出しが生じるか否かを判定する処理である。制御処理は、判定処理の結果に基づいて、移動体(1)を制御する処理である。
この態様によれば、対象物(X1)を保持した状態で移動体(1)をスムーズに移動させやすい、という利点がある。
第2の態様に係る移動体制御方法では、第1の態様において、判定処理は、移動体(1)の旋回時において移動経路(C1)からのはみ出しが生じるか否かを判定する処理を含む。
この態様によれば、移動体(1)の旋回時における移動経路(C1)からのはみ出しを防ぐための措置をとりやすい、という利点がある。
第3の態様に係る移動体制御方法では、第2の態様において、制御処理は、移動経路(C1)からはみ出さないように移動体(1)の旋回時における旋回中心の位置を調整する処理を含む。
この態様によれば、移動経路(C1)からはみ出すことなく移動体(1)を旋回させやすい、という利点がある。
第4の態様に係る移動体制御方法では、第1~第3のいずれかの態様において、制御処理は、移動体(1)がはみ出すことなく移動可能な経路に移動経路(C1)を変更する処理を含む。
この態様によれば、対象物(X1)を保持した状態で移動体(1)をスムーズに移動させやすい、という利点がある。
第5の態様に係る移動体制御方法では、第1~第4のいずれかの態様において、制御処理は、移動経路(C1)からのはみ出しが生じることを報知する処理を含む。
この態様によれば、移動体(1)の周囲にいる人、又は移動体(1)を含めたシステム(上位システム(4))の管理者が、移動経路(C1)からのはみ出しに対する措置をとりやすい、という利点がある。
第6の態様に係る移動体制御方法では、第1~第5のいずれかの態様において、制御処理は、移動体(1)の旋回が許可されているか否かの情報に基づいて、移動体(1)を旋回させるか否かを決定する処理を含む。
この態様によれば、移動体(1)の旋回が許可されていない移動経路(C1)においても、何らかの措置をとることが可能である、という利点がある。
第7の態様に係る移動体制御方法では、第1~第6のいずれかの態様において、制御処理は、所定の許可条件を満たす場合、判定処理の判定結果に依らず、移動経路(C1)からのはみ出しを許可する処理を含む。
この態様によれば、判定処理の結果を待たずに移動体(1)の移動を継続させることができるので、移動体(1)を目的地まで移動させるのに要する時間を短縮することができる、という利点がある。
第8の態様に係る移動体制御方法は、第1~第7のいずれかの態様において、判定処理の結果を、移動体(1)を遠隔で制御する上位システム(4)に出力する出力処理を更に有する。
この態様によれば、上位システム(4)の管理者が移動経路(C1)からのはみ出しに対する措置をとりやすい、という利点がある。
第9の態様に係る移動体制御方法では、第1~第8のいずれかの態様において、判定処理は、対象物(X1)の形状及び大きさに基づいて、移動経路(C1)からのはみ出しが生じるか否かを判定する。
この態様によれば、対象物(X1)が移動経路(C1)からはみ出すか否かを判定しやすい、という利点がある。
第10の態様に係る移動体制御方法では、第1~第9のいずれかの態様において、判定処理は、移動体(1)にて実行される。
この態様によれば、対象物(X1)を保持した状態で移動体(1)をスムーズに移動させるための処理を移動体(1)で完結することができる、という利点がある。
第11の態様に係る移動体制御方法では、第1~第9のいずれかの態様において、判定処理は、移動体(1)を遠隔で制御する上位システム(4)にて実行される。
この態様によれば、例えば移動体(1)が複数存在する場合に、対象物(X1)を保持した状態で移動体(1)をスムーズに移動させるための処理を、上位システム(4)で一括して行える、という利点がある。
第12の態様に係る移動体制御方法では、第1~第11のいずれかの態様において、移動体(1)は、検知部(11)を有する。移動体制御方法は、取得処理と、第2制御処理と、を更に有する。取得処理は、移動体(1)と対象物(X1)との間の距離に関連する距離情報を含む検知部(11)の検知結果を取得する処理である。第2制御処理は、上記の制御処理としての第1制御処理とは別に、検知結果に基づいて、対象物(X1)の位置及び向きを推定するための複数の特徴部(X10)のうちの一部の特徴部(X10)を認識すると、移動体(1)を制御する処理である。
この態様によれば、移動体(1)を対象物(X1)までスムーズに移動させやすい、という利点がある。
第13の態様に係る移動体制御方法は、第1~第12のいずれかの態様において、移動判定処理と、第3制御処理と、を更に有する。移動判定処理は、移動体(1)を対象物(X1)まで移動させる途中において、対象物(X1)の移動の有無を判定する処理である。第3制御処理は、上記の制御処理としての第1制御処理とは別に、移動判定処理にて対象物(X1)の移動があると判定された場合に、移動体(1)を制御する処理である。
この態様によれば、移動体(1)を対象物(X1)までスムーズに移動させやすい、という利点がある。
第14の態様に係る移動体制御システム(100)は、対象物(X1)を搬送する移動体(1)と、移動体(1)を制御する制御システム(3)と、を備える。制御システム(3)は、判定部(304)と、制御部(302)と、を有する。判定部(304)は、対象物(X1)を搬送している状態にある移動体(1)について、対象物(X1)を含めて移動体(1)が通過することを許容されている移動経路(C1)からのはみ出しが生じるか否かを判定する。制御部(302)は、判定部(304)の結果に基づいて、移動体(1)を制御する。
この態様によれば、対象物(X1)を保持した状態で移動体(1)をスムーズに移動させやすい、という利点がある。
第15の態様に係るプログラムは、1以上のプロセッサに、第1~第13のいずれかの態様の移動体制御方法を実行させるためのプログラムである。
この態様によれば、対象物(X1)を保持した状態で移動体(1)をスムーズに移動させやすい、という利点がある。
第2~第13の態様に係る方法については、移動体制御方法に必須の方法ではなく、適宜省略可能である。
また、第16の態様に係る移動体制御方法は、移動判定処理と、制御処理(第3制御処理)と、を有する。移動判定処理は、移動体(1)を対象物(X1)まで移動させる途中において、対象物(X1)の移動の有無を判定する処理である。制御処理は、移動判定処理にて対象物(X1)の移動があると判定された場合に、移動体(1)を制御する処理である。
この態様によれば、移動体(1)を対象物(X1)までスムーズに移動させやすい、という利点がある。
第17の態様に係る移動体制御方法では、第16の態様において、制御処理は、対象物(X1)に対する移動体(1)の軌道を修正し、修正した軌道にて移動体(1)を対象物(X1)まで移動させるリトライ処理を含む。
この態様によれば、搬送装置(1)が対象物(X1)まで到達しなかったり、搬送装置(1)が対象物(X1)に衝突したりする等といった障害が生じにくく、搬送装置(1)を対象物(X1)まで移動させるという目的を達成しやすい、という利点がある。
第18の態様に係る移動体制御方法では、第17の態様において、リトライ処理は、軌道を修正する前に、移動体(1)が対象物(X1)への移動を開始した位置まで移動体(1)を復帰させる処理を含む。
この態様によれば、対象物(X1)の移動があると判定した地点からでは軌道を修正することが困難な場合でも、搬送装置(1)を対象物(X1)まで移動させるという目的を達成しやすい、という利点がある。
第19の態様に係る移動体制御方法では、第17の態様において、リトライ処理は、対象物(X1)の移動に追従するように移動体(1)を対象物(X1)まで移動させる処理を含む。
この態様によれば、移動体(1)が対象物(X1)への移動を開始した位置まで移動体(1)を復帰させる場合と比較して、搬送装置(1)を対象物(X1)まで移動させるのに要する時間を短縮することができる、という利点がある。
第20の態様に係る移動体制御方法では、第16~第19のいずれかの態様において、制御処理は、対象物(X1)の移動があったことを報知する処理を含む。
この態様によれば、移動体(1)の周囲にいる人、又は移動体(1)を含めたシステム(上位システム(4))の管理者が、対象物(X1)の移動に対する措置をとりやすい、という利点がある。
第21の態様に係る移動体制御方法では、第16~第20のいずれかの態様において、制御処理は、対象物(X1)が所定の領域から外れた場合、移動体(1)の対象物(X1)までの移動を停止させる処理を含む。
この態様によれば、他の移動体(1)が管轄するエリアに移動体(1)が進入して他の移動体(1)の動作を妨げるのを防ぎやすい、という利点がある。
第22の態様に係る移動体制御方法では、第21の態様において、制御処理は、対象物(X1)が所定の領域から外れた方向を検知する処理を含む。
この態様によれば、移動後の対象物(X1)の位置を把握しやすい、という利点がある。
第23の態様に係る移動体制御方法では、第16~第22のいずれかの態様において、移動判定処理は、対象物(X1)に含まれる複数の監視対象(特徴部(X10))のうちの1以上の監視対象の動きに基づいて、対象物(X1)の移動の有無を判定する。
この態様によれば、対象物(X1)の移動の有無を随時判定しやすい、という利点がある。
第24の態様に係る移動体制御方法では、第23の態様において、1以上の監視対象は、自在輪を含む。
この態様によれば、対象物(X1)全体の動きだけでなく、対象物(X1)の一部(自在輪)の動きからも対象物(X1)の移動の有無を判定することができる、という利点がある。
第25の態様に係る移動体制御方法では、第16~第24のいずれかの態様において、移動判定処理は、移動体(1)の有する検知部(11)の検知結果に基づいて、対象物(X1)の移動の有無を判定する。
この態様によれば、移動体(1)以外のシステム(上位システム(4))からの情報を受けずに、対象物(X1)の移動の有無を判定することができる、という利点がある。
第26の態様に係る移動体制御方法では、第16~第25のいずれかの態様において、対象物(X1)は、移動体(1)が搬送する搬送物である。
この態様によれば、対象物(X1)を搬送する移動体(1)である搬送装置(1)を、対象物(X1)までスムーズに移動させやすい、という利点がある。
第27の態様に係る移動体制御方法は、第26の態様において、保持処理と、搬送処理と、を更に有する。保持処理は、対象物(X1)の下方に移動体(1)を進入させ、移動体(1)に対象物(X1)を持ち上げさせて対象物(X1)を移動体(1)に保持させる処理である。搬送処理は、対象物(X1)を移動体(1)に保持させた状態で、移動体(1)を目的地まで移動させる処理である。
この態様によれば、対象物(X1)を搬送する移動体(1)である搬送装置(1)により、対象物(X1)を目的地までスムーズに搬送させやすい、という利点がある。
第28の態様に係る移動体制御方法では、第16~第27のいずれかの態様において、制御処理の内容は、対象物(X1)の移動の態様に応じて決定される。
この態様によれば、対象物(X1)の移動の態様に応じて適切な措置をとりやすい、という利点がある。
第29の態様に係る移動体制御システム(100)は、移動体(1)と、移動体(1)を制御する制御システム(3)と、を備える。制御システム(3)は、移動判定部(303)と、制御部(302)と、を有する。移動判定部(303)は、移動体(1)を対象物(X1)まで移動させる途中において、対象物(X1)の移動の有無を判定する。制御部(302)は、移動判定部(303)にて対象物(X1)の移動があると判定された場合に、移動体(1)を制御する。
この態様によれば、移動体(1)を対象物(X1)までスムーズに移動させやすい、という利点がある。
第30の態様に係るプログラムは、1以上のプロセッサに、第16~第28のいずれかの態様の移動体制御方法を実行させるためのプログラムである。
この態様によれば、移動体(1)を対象物(X1)までスムーズに移動させやすい、という利点がある。
第17~第28の態様に係る方法については、移動体制御方法に必須の方法ではなく、適宜省略可能である。
また、第31の態様に係る移動体制御方法は、取得処理と、制御処理(第2制御処理)と、を有する。取得処理は、検知部(11)を有する移動体(1)と対象物(X1)との間の距離に関連する距離情報を含む検知部(11)の検知結果を取得する処理である。制御処理は、検知結果に基づいて、対象物(X1)の位置及び向きを推定するための複数の特徴部(X10)のうちの一部の特徴部(X10)を認識すると、移動体(1)を制御する処理である。
この態様によれば、移動体(1)を対象物(X1)までスムーズに移動させやすい、という利点がある。
第32の態様に係る移動体制御方法では、第31の態様において、制御処理は、対象物(X1)の複数の特徴部(X10)の全てを認識可能な位置まで移動体(1)を移動させるサブ処理を含む。
この態様によれば、対象物(X1)の位置及び向きを推定する精度を向上することができる、という利点がある。
第33の態様に係る移動体制御方法では、第32の態様において、制御処理は、移動体(1)を対象物(X1)まで移動させるメイン処理を含む。メイン処理は、サブ処理の途中において、対象物(X1)の位置及び向きを推定すると実行される。
この態様によれば、サブ処理を完了してからメイン処理を実行する場合と比較して、移動体(1)を対象物(X1)まで移動させるのに要する時間を短縮することができる、という利点がある。
第34の態様に係る移動体制御方法では、第31の態様において、制御処理は、移動体(1)を対象物(X1)まで移動させるメイン処理を含む。メイン処理は、一部の特徴部(X10)の認識結果に基づいて対象物(X1)の位置及び向きを推定すると実行される。
この態様によれば、サブ処理を実行する場合と比較して、移動体(1)を対象物(X1)まで移動させるのに要する時間を短縮することができる、という利点がある。
第35の態様に係る移動体制御方法では、第33又は第34の態様において、メイン処理は、移動体(1)を曲線の軌道を描くように移動させる処理を含む。
この態様によれば、旋回及び前進を組み合わせて移動体(1)を移動させる場合と比較して、移動体(1)を対象物(X1)まで移動させるのに要する時間を短縮することができる、という利点がある。
第36の態様に係る移動体制御方法では、第31~第35のいずれかの態様において、複数の特徴部(X10)は、対象物(X1)の脚部を含む。
この態様によれば、移動体(1)の高さが対象物(X1)の高さよりも低い場合でも、特徴部(X10)を認識しやすい、という利点がある。
第37の態様に係る移動体制御方法では、第31~第36のいずれかの態様において、対象物(X1)の位置及び向きを推定するための処理(第1推定処理)では、移動体(1)に対する対象物(X1)の相対的な位置情報を用いる。
この態様によれば、移動体(1)にて比較的容易に取得可能な情報を用いて、対象物(X1)の位置及び向きを推定することができる、という利点がある。
第38の態様に係る移動体制御方法では、第37の態様において、対象物(X1)の位置及び向きを推定するための処理(第1推定処理)では、移動体(1)の周囲を撮像するカメラの撮像結果を更に用いる。
この態様によれば、距離情報に加えてカメラの撮像結果を用いることで、対象物(X1)の位置及び向きを推定する精度を向上することができる、という利点がある。
第39の態様に係る移動体制御方法では、第31~第38のいずれかの態様において、対象物(X1)は、移動体(1)が搬送する搬送物である。
この態様によれば、対象物(X1)を搬送する移動体(1)である搬送装置(1)を、対象物(X1)までスムーズに移動させやすい、という利点がある。
第40の態様に係る移動体制御方法は、第39の態様において、保持処理と、搬送処理と、を更に有する。保持処理は、対象物(X1)の下方に移動体(1)を進入させ、移動体(1)に対象物(X1)を持ち上げさせて対象物(X1)を移動体(1)に保持させる処理である。搬送処理は、対象物(X1)を移動体(1)に保持させた状態で、移動体(1)を目的地まで移動させる処理である。
この態様によれば、対象物(X1)を搬送する移動体(1)である搬送装置(1)により、対象物(X1)を目的地までスムーズに搬送させやすい、という利点がある。
第41の態様に係る移動体制御システム(100)は、検知部(11)を有する移動体(1)と、移動体(1)を制御する制御システム(3)と、を備える。制御システム(3)は、取得部(301)と、制御部(302)と、を有する。取得部(301)は、移動体(1)と対象物(X1)との間の距離に関連する距離情報を含む検知部(11)の検知結果を取得する。制御部(302)は、検知結果に基づいて、対象物(X1)の位置及び向きを推定するための複数の特徴部(X10)のうちの一部の特徴部(X10)を認識すると、移動体(1)を制御する。
この態様によれば、移動体(1)を対象物(X1)までスムーズに移動させやすい、という利点がある。
第42の態様に係るプログラムは、1以上のプロセッサに、第31~第40のいずれかの態様の移動体制御方法を実行させるためのプログラムである。
この態様によれば、移動体(1)を対象物(X1)までスムーズに移動させやすい、という利点がある。
第32~第40の態様に係る方法については、移動体制御方法に必須の方法ではなく、適宜省略可能である。
1 搬送装置(移動体)
11 検知部
3 制御システム
301 取得部
302 制御部
303 移動判定部
304 判定部
4 上位システム
100 移動体制御システム
C1 移動経路
X1 対象物
X10 特徴部(監視対象)
11 検知部
3 制御システム
301 取得部
302 制御部
303 移動判定部
304 判定部
4 上位システム
100 移動体制御システム
C1 移動経路
X1 対象物
X10 特徴部(監視対象)
Claims (15)
- 対象物を搬送している状態にある移動体について、前記対象物を含めて前記移動体が通過することを許容されている移動経路からのはみ出しが生じるか否かを判定する判定処理と、
前記判定処理の結果に基づいて、前記移動体を制御する制御処理と、を有する、
移動体制御方法。 - 前記判定処理は、前記移動体の旋回時において前記移動経路からのはみ出しが生じるか否かを判定する処理を含む、
請求項1記載の移動体制御方法。 - 前記制御処理は、前記移動経路からはみ出さないように前記移動体の旋回時における旋回中心の位置を調整する処理を含む、
請求項2記載の移動体制御方法。 - 前記制御処理は、前記移動体がはみ出すことなく移動可能な経路に前記移動経路を変更する処理を含む、
請求項1~3のいずれか1項に記載の移動体制御方法。 - 前記制御処理は、前記移動経路からのはみ出しが生じることを報知する処理を含む、
請求項1~4のいずれか1項に記載の移動体制御方法。 - 前記制御処理は、前記移動体の旋回が許可されているか否かの情報に基づいて、前記移動体を旋回させるか否かを決定する処理を含む、
請求項1~5のいずれか1項に記載の移動体制御方法。 - 前記制御処理は、所定の許可条件を満たす場合、前記判定処理の判定結果に依らず、前記移動経路からのはみ出しを許可する処理を含む、
請求項1~6のいずれか1項に記載の移動体制御方法。 - 前記判定処理の結果を、前記移動体を遠隔で制御する上位システムに出力する出力処理を更に有する、
請求項1~7のいずれか1項に記載の移動体制御方法。 - 前記判定処理は、前記対象物の形状及び大きさに基づいて、前記移動経路からのはみ出しが生じるか否かを判定する、
請求項1~8のいずれか1項に記載の移動体制御方法。 - 前記判定処理は、前記移動体にて実行される、
請求項1~9のいずれか1項に記載の移動体制御方法。 - 前記判定処理は、前記移動体を遠隔で制御する上位システムにて実行される、
請求項1~9のいずれか1項に記載の移動体制御方法。 - 前記移動体は、検知部を有し、
前記移動体と前記対象物との間の距離に関連する距離情報を含む前記検知部の検知結果を取得する取得処理と、
前記制御処理としての第1制御処理とは別に、前記検知結果に基づいて、前記対象物の位置及び向きを推定するための複数の特徴部のうちの一部の特徴部を認識すると、前記移動体を制御する第2制御処理と、を更に有する、
請求項1~11のいずれか1項に記載の移動体制御方法。 - 前記移動体を前記対象物まで移動させる途中において、前記対象物の移動の有無を判定する移動判定処理と、
前記制御処理としての第1制御処理とは別に、前記移動判定処理にて前記対象物の移動があると判定された場合に、前記移動体を制御する第3制御処理と、を更に有する、
請求項1~12のいずれか1項に記載の移動体制御方法。 - 対象物を搬送する移動体と、
前記移動体を制御する制御システムと、を備え、
前記制御システムは、
前記対象物を搬送している状態にある移動体が、前記対象物を含めて前記移動体が通過することを許容されている移動経路からのはみ出しが生じるか否かを判定する判定部と、
前記判定部の結果に基づいて、前記移動体を制御する制御部と、を有する、
移動体制御システム。 - 1以上のプロセッサに、
請求項1~13のいずれか1項に記載の移動体制御方法を実行させるための、
プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/435,149 US12084328B2 (en) | 2019-03-04 | 2020-02-12 | Mover control method, mover control system, and program |
| JP2021503498A JPWO2020179386A1 (ja) | 2019-03-04 | 2020-02-12 | |
| CN202080017921.2A CN113544614B (zh) | 2019-03-04 | 2020-02-12 | 移动体控制方法、移动体控制系统 |
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019-039010 | 2019-03-04 | ||
| JP2019039009 | 2019-03-04 | ||
| JP2019-039009 | 2019-03-04 | ||
| JP2019039008 | 2019-03-04 | ||
| JP2019-039008 | 2019-03-04 | ||
| JP2019039010 | 2019-03-04 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020179386A1 true WO2020179386A1 (ja) | 2020-09-10 |
Family
ID=72336902
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/005380 WO2020179386A1 (ja) | 2019-03-04 | 2020-02-12 | 移動体制御方法、移動体制御システム、及びプログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12084328B2 (ja) |
| JP (1) | JPWO2020179386A1 (ja) |
| CN (1) | CN113544614B (ja) |
| WO (1) | WO2020179386A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023191635A1 (en) * | 2022-03-28 | 2023-10-05 | Sp Development As | Transport apparatus and method for transporting a load |
| JP7565499B2 (ja) | 2021-02-22 | 2024-10-11 | パナソニックIpマネジメント株式会社 | 移動体、及び移動体制御方法 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7192748B2 (ja) * | 2019-11-25 | 2022-12-20 | トヨタ自動車株式会社 | 搬送システム、学習済みモデル生成方法、学習済みモデル、制御方法およびプログラム |
| WO2024116332A1 (ja) * | 2022-11-30 | 2024-06-06 | 株式会社Fuji | 無人搬送車 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006079319A (ja) * | 2004-09-09 | 2006-03-23 | Nippon Yusoki Co Ltd | 搬送車の搬送制御装置 |
| WO2016051818A1 (ja) * | 2014-09-29 | 2016-04-07 | 日立建機株式会社 | 障害物回避システム |
| JP2016081159A (ja) * | 2014-10-14 | 2016-05-16 | トヨタ自動車株式会社 | 移動体 |
| WO2017163790A1 (ja) * | 2017-02-28 | 2017-09-28 | 株式会社小松製作所 | 作業車両の制御装置、作業車両、及び作業車両の制御方法 |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB8317678D0 (en) * | 1983-06-29 | 1983-08-03 | Molex Inc | Packaging arrangement for electrical connectors |
| US5310076A (en) * | 1992-10-19 | 1994-05-10 | Arrow Electronics, Inc. | Snap-on lid for computer chip tray |
| TW353854B (en) * | 1994-03-14 | 1999-03-01 | Minnesota Mining & Mfg | Component tray with removable insert |
| JPH1081240A (ja) | 1996-09-10 | 1998-03-31 | Sugikuni Kogyo Kk | パレットトラック |
| JP5085024B2 (ja) * | 2005-08-31 | 2012-11-28 | 株式会社イトーキ | 移動棚装置 |
| JP4839939B2 (ja) | 2006-04-17 | 2011-12-21 | トヨタ自動車株式会社 | 自律移動装置 |
| US7826919B2 (en) * | 2006-06-09 | 2010-11-02 | Kiva Systems, Inc. | Method and system for transporting inventory items |
| JP4479781B2 (ja) * | 2007-11-15 | 2010-06-09 | 日本電気株式会社 | 記憶媒体用ライブラリ装置 |
| JP5238882B2 (ja) * | 2009-06-01 | 2013-07-17 | パナソニック株式会社 | 画像符号化装置、方法、集積回路、プログラム |
| JP5397839B2 (ja) * | 2010-07-26 | 2014-01-22 | 株式会社安川電機 | 搬送車両システム |
| TWI469902B (zh) * | 2011-04-11 | 2015-01-21 | Univ Nat Kaohsiung Applied Sci | 無人無軌式搬運車 |
| US10214354B2 (en) * | 2014-12-18 | 2019-02-26 | Nextshift Robotics, Inc. | Method and system for automated transport of items |
| US9757002B2 (en) * | 2015-03-06 | 2017-09-12 | Wal-Mart Stores, Inc. | Shopping facility assistance systems, devices and methods that employ voice input |
| US9561941B1 (en) * | 2015-03-30 | 2017-02-07 | X Development Llc | Autonomous approach and object pickup |
| US10168711B2 (en) | 2015-09-16 | 2019-01-01 | Omron Adept Technologies, Inc. | Method and apparatus for autonomous conveyance of transport carts |
| CN105302140A (zh) * | 2015-11-04 | 2016-02-03 | 湖南格兰博智能科技有限责任公司 | 一种清洁机器人的移动路线控制系统及控制方法 |
| CN105480903A (zh) * | 2015-11-13 | 2016-04-13 | 上海诺力智能科技有限公司 | 一种货叉的定位方法 |
| CN107922119B (zh) * | 2015-11-25 | 2020-05-29 | 株式会社日立制作所 | 货架配置系统、搬运机器人以及货架配置方法 |
| CN109074079B (zh) * | 2016-04-27 | 2021-09-28 | 日本电产新宝株式会社 | 移动体的管理系统、方法以及计算机程序 |
| JP2017201493A (ja) * | 2016-05-06 | 2017-11-09 | 村田機械株式会社 | 柱状物体認識方法、柱状物体認識装置および無人走行車 |
| CN109564430B (zh) * | 2016-07-29 | 2022-07-12 | 日本电产株式会社 | 移动体引导系统、移动体、引导装置以及计算机程序 |
| US10209711B1 (en) * | 2016-09-28 | 2019-02-19 | Amazon Technologies, Inc. | Techniques for contention resolution for mobile drive units |
| US10459453B2 (en) * | 2016-11-08 | 2019-10-29 | Cybernet Systems Corp. | Autonomous vehicles and methods of zone driving |
| US10409281B1 (en) * | 2017-06-09 | 2019-09-10 | Amazon Technologies, Inc. | Sensor controlled drive unit ingress and egress |
| JP2019015681A (ja) * | 2017-07-10 | 2019-01-31 | Kyb株式会社 | 位置推定システム及び位置推定方法 |
| US11014238B2 (en) * | 2017-11-27 | 2021-05-25 | Amazon Technologies, Inc. | Dynamic navigation of autonomous vehicle with safety infrastructure |
| US10994418B2 (en) * | 2017-12-13 | 2021-05-04 | X Development Llc | Dynamically adjusting roadmaps for robots based on sensed environmental data |
| US10394234B2 (en) * | 2017-12-18 | 2019-08-27 | The Boeing Company | Multi-sensor safe path system for autonomous vehicles |
| US10640347B2 (en) * | 2017-12-22 | 2020-05-05 | X Development Llc | Pallet tracking during engagement and disengagement |
| JP7199003B2 (ja) * | 2018-02-02 | 2023-01-05 | パナソニックIpマネジメント株式会社 | 搬送装置、受信機能付き搬送装置、搬送システム、上位システム、搬送装置の制御方法、及びプログラム |
| CN108544534B (zh) * | 2018-04-24 | 2020-10-27 | 泰州市元和达电子科技有限公司 | 一种基于机器人的隐藏式智能物品放置系统 |
| CN109018810B (zh) | 2018-10-18 | 2020-02-21 | 北京极智嘉科技有限公司 | 对接货物容器的方法、装置、机器人和存储介质 |
| US10870204B2 (en) * | 2019-01-25 | 2020-12-22 | Mujin, Inc. | Robotic system control method and controller |
| US20210300739A1 (en) * | 2020-03-24 | 2021-09-30 | Halliburton Energy Services, Inc. | On Site Logistics Using Autonomous Lifting Systems In Organized Use Sites |
-
2020
- 2020-02-12 US US17/435,149 patent/US12084328B2/en active Active
- 2020-02-12 JP JP2021503498A patent/JPWO2020179386A1/ja active Pending
- 2020-02-12 WO PCT/JP2020/005380 patent/WO2020179386A1/ja active Application Filing
- 2020-02-12 CN CN202080017921.2A patent/CN113544614B/zh active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006079319A (ja) * | 2004-09-09 | 2006-03-23 | Nippon Yusoki Co Ltd | 搬送車の搬送制御装置 |
| WO2016051818A1 (ja) * | 2014-09-29 | 2016-04-07 | 日立建機株式会社 | 障害物回避システム |
| JP2016081159A (ja) * | 2014-10-14 | 2016-05-16 | トヨタ自動車株式会社 | 移動体 |
| WO2017163790A1 (ja) * | 2017-02-28 | 2017-09-28 | 株式会社小松製作所 | 作業車両の制御装置、作業車両、及び作業車両の制御方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7565499B2 (ja) | 2021-02-22 | 2024-10-11 | パナソニックIpマネジメント株式会社 | 移動体、及び移動体制御方法 |
| WO2023191635A1 (en) * | 2022-03-28 | 2023-10-05 | Sp Development As | Transport apparatus and method for transporting a load |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220135384A1 (en) | 2022-05-05 |
| JPWO2020179386A1 (ja) | 2020-09-10 |
| CN113544614A (zh) | 2021-10-22 |
| US12084328B2 (en) | 2024-09-10 |
| CN113544614B (zh) | 2024-05-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2020179386A1 (ja) | 移動体制御方法、移動体制御システム、及びプログラム | |
| TWI702178B (zh) | 物品搬送設備 | |
| JP7199003B2 (ja) | 搬送装置、受信機能付き搬送装置、搬送システム、上位システム、搬送装置の制御方法、及びプログラム | |
| WO2019136369A1 (en) | Network computer system to evaluate freight loads | |
| TW201833702A (zh) | 進行障礙物之迴避動作的移動體及記錄其之電腦程式的記錄媒體 | |
| JPWO2019026761A1 (ja) | 移動体およびコンピュータプログラム | |
| CN109895825B (zh) | 自动运输装置 | |
| JP2019148881A (ja) | 移動体、移動体を制御する方法およびコンピュータプログラム | |
| JP2022518012A (ja) | 自動運転車用自律放送システム | |
| JP7164085B2 (ja) | 移動体を用いたワークの搬送方法、コンピュータプログラム、および移動体 | |
| CN112835358A (zh) | 运送系统、学习完毕模型及其生成方法、控制方法及程序 | |
| CN111052026A (zh) | 移动体和移动体系统 | |
| JP2019175137A (ja) | 移動体および移動体システム | |
| JP2019079171A (ja) | 移動体 | |
| JP7500484B2 (ja) | 無人搬送車、無人搬送システム及び搬送プログラム | |
| JP7318713B2 (ja) | 搬送システム、制御装置、搬送方法及びプログラム | |
| JP7300413B2 (ja) | 制御装置、移動体、移動制御システム、制御方法及びプログラム | |
| US20230211987A1 (en) | Pathfinding using centerline heuristics for an autonomous mobile robot | |
| WO2023086666A1 (en) | Adaptive mobile robot behavior based on payload | |
| JP7422326B2 (ja) | 搬送制御方法、プログラム、及び搬送システム | |
| JP2019148871A (ja) | 移動体および移動体システム | |
| JP7397045B2 (ja) | 無人搬送装置 | |
| JP7504527B1 (ja) | 搬送システム、搬送制御方法およびプログラム | |
| JP7548650B1 (ja) | 移動体の経路生成システム、経路生成方法、及びプログラム | |
| WO2024134840A1 (ja) | 自動移動装置及び自動移動装置の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20766462 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021503498 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20766462 Country of ref document: EP Kind code of ref document: A1 |