WO2019123952A1 - ロータおよびモータ - Google Patents
ロータおよびモータ Download PDFInfo
- Publication number
- WO2019123952A1 WO2019123952A1 PCT/JP2018/042841 JP2018042841W WO2019123952A1 WO 2019123952 A1 WO2019123952 A1 WO 2019123952A1 JP 2018042841 W JP2018042841 W JP 2018042841W WO 2019123952 A1 WO2019123952 A1 WO 2019123952A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- rotor
- shaft
- rotor core
- fitting
- convex portion
- Prior art date
Links
Images




Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/28—Means for mounting or fastening rotating magnetic parts on to, or to, the rotor structures
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
Abstract
ロータは、インナーロータ型のモータに用いられるロータであって、上下方向に延びる中心軸を中心とするシャフトと、シャフトに固定されたロータコアと、ロータコアに支持されるロータマグネットと、を備える。ロータコアには、シャフトが圧入される中央孔が設けられる。中央孔の内周面には、周方向に沿って並び径方向内側に突出し先端面でシャフトと接触する複数の嵌合凸部が設けられる。シャフトの外周面には、軸方向に沿って延び、径方向において先端面と対向する溝部が設けられる。
Description
本発明は、ロータおよびモータに関する。
モータにおいて、互いに固定されたシャフトおよびロータコアを有するロータが知られている。シャフトとロータコアとの締結構造としては、キー嵌合により固定される構造および圧入により固定される構造等が知られている。例えば、特許文献1には、シャフトとロータコアとをキー嵌合させる構造が開示されている。
キー嵌合による固定構造を採用する場合、シャフトとロータコアとの嵌合部において、周方向に隙間が設けられる。このため、高速回転中に振動が生じる虞がある。また、ロータコアにシャフトを圧入する固定構造を採用する場合、シャフトとロータコアとの空転対策が求められる。
本発明の一態様は、本発明の一態様は、ロータコアとシャフトとの空転を抑制できるロータを提供することを目的の一つとする。
本発明の一態様のロータは、インナーロータ型のモータに用いられるロータであって、上下方向に延びる中心軸を中心とするシャフトと、前記シャフトに固定されたロータコアと、前記ロータコアに支持されるロータマグネットと、を備える。前記ロータコアには、前記シャフトが圧入される中央孔が設けられる。前記中央孔の内周面には、周方向に沿って並び径方向内側に突出し先端面で前記シャフトと接触する複数の嵌合凸部が設けられる。前記シャフトの外周面には、軸方向に沿って延び、径方向において前記先端面と対向する溝部が設けられる。
本発明の一態様によれば、ロータコアとシャフトとの空転を抑制できるロータを提供できる。
以下、図面を参照しながら、本発明の実施形態に係るロータおよびモータについて説明する。なお、以下の図面においては、各構成をわかりやすくするために、実際の構造と各構造における縮尺や数等を異ならせる場合がある。
各図には、適宜Z軸を示す。各図のZ軸方向は、図1に示す中心軸Jの軸方向と平行な方向とする。また、以下の説明においては、Z軸方向の正の側(+Z側)を「上側」と呼び、Z軸方向の負の側(-Z側)を「下側」と呼ぶ。なお、上側および下側とは、単に説明のために用いられる方向であって、実際の位置関係や方向を限定しない。また、特に断りのない限り、中心軸Jに平行な方向(Z軸方向)を単に「軸方向」又は「上下方向」と呼び、中心軸Jを中心とする径方向を単に「径方向」と呼び、中心軸Jを中心とする周方向、すなわち、中心軸Jの軸周りを単に「周方向」と呼ぶ。さらに、以下の説明において、「平面視」とは、軸方向から見た状態を意味する。
<モータ>
図1は、一実施形態のモータ1の中心軸Jに沿う断面模式図である。モータ1は、ロータ3と、ステータ10と、ハウジング2と、ベアリングホルダ5と、上側ベアリング6Aと、下側ベアリング6Bと、を有する。本実施形態のモータ1は、ステータ10の径方向内側にロータ3が配置されたインナーロータ型のモータである。
図1は、一実施形態のモータ1の中心軸Jに沿う断面模式図である。モータ1は、ロータ3と、ステータ10と、ハウジング2と、ベアリングホルダ5と、上側ベアリング6Aと、下側ベアリング6Bと、を有する。本実施形態のモータ1は、ステータ10の径方向内側にロータ3が配置されたインナーロータ型のモータである。
ハウジング2は、上側に開口する筒状である。ハウジング2は、ロータ3、ステータ10およびベアリングホルダ5を収容する。ハウジング2は、筒状部2aと底部2bとを有する。筒状部2aは、ステータ10を径方向外側から囲む。底部2bは、筒状部2aの下端に位置する。底部2bの平面視中央には、下側ベアリング6Bを保持する下側ベアリング保持部2cが設けられる。
ベアリングホルダ5は、ステータ10の上側に位置する。ベアリングホルダ5は、ハウジング2の内周面に保持される。ベアリングホルダ5は、上側ベアリング保持部5aにおいて、上側ベアリング6Aを保持する。
ステータ10は、中心軸J周りに環状に配置される。ステータ10は、ロータ3の径方向外側に位置する。ステータ10は、ロータ3と隙間を介して径方向に対向する。ステータ10は、ハウジング2の内周面に固定される。ステータ10は、環状のステータコア11と、ステータコア11に上下方向から装着された一対のインシュレータ14と、インシュレータ14を介してステータコア11に装着されたコイル13と、を有する。
<ロータ>
ロータ3は、インナーロータ型のモータ1に用いられる。ロータ3は、上下方向に延びる中心軸J周りに回転する。ロータ3は、シャフト90と、複数のロータコア30と、複数のロータマグネット3bと、を有する。シャフト90は、上下方向(軸方向)に延びる中心軸Jを中心として上下方向に延びる。シャフト90は、中心軸Jと直交する断面形状が円形である。シャフト90は、上側ベアリング6Aと下側ベアリング6Bとによって、中心軸Jの軸周りに回転可能に支持される。
ロータ3は、インナーロータ型のモータ1に用いられる。ロータ3は、上下方向に延びる中心軸J周りに回転する。ロータ3は、シャフト90と、複数のロータコア30と、複数のロータマグネット3bと、を有する。シャフト90は、上下方向(軸方向)に延びる中心軸Jを中心として上下方向に延びる。シャフト90は、中心軸Jと直交する断面形状が円形である。シャフト90は、上側ベアリング6Aと下側ベアリング6Bとによって、中心軸Jの軸周りに回転可能に支持される。
ロータコア30は、シャフト90の外周面90aに固定される。本実施形態のロータ3には、軸方向に沿って並ぶ2つのロータコア(第1のロータコア30Aおよび第2のロータコア30B)が設けられる。第1のロータコア30Aと第2のロータコア30Bとは、同形状である。本明細書において、第1のロータコア30Aと第2のロータコア30Bとを区別しない場合、これらを単にロータコア30と呼ぶ。
第1のロータコア30Aおよび第2のロータコア30Bの外周面には、それぞれロータマグネット3bが固定される。すなわち、ロータマグネット3bは、ロータコア30に支持される。
第1のロータコア30Aと第2のロータコア30Bとは、ロータマグネット3bの磁極を周方向にずらした状態でシャフト90に固定される。すなわち、第1のロータコア30Aと第2のロータコア30Bとは、所定のスキュー角で互いに回転方向にずらして配置される。これにより、モータ1のコギングトルクを低減できる。 なお、本実施形態において、ロータ3は、2つのロータコア30を有する場合を例示したが、スキュー角を付与されて配置された3以上のロータコアを有していてもよい。
ロータコア30は、複数の電磁鋼板39を軸方向に沿って積層して構成されている。複数の電磁鋼板39は、同形状である。したがって、軸方向から見たロータコア30の形状は、それぞれの電磁鋼板39の軸方向から見た形状と一致する。
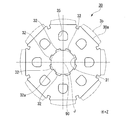
図2は、一実施形態のロータコア30の平面図である。 ロータコア30は、軸方向に沿って一様な断面で延びる。ロータコア30は、軸方向から見て、外形形状が略多角形である。本実施形態において、ロータコア30は、軸方向から見て八角形である。すなわち、本実施形態のロータコア30は、八角形柱である。
ロータコア30は、径方向外側を向く8つの保持面30aを有する。8つの保持面30aは、ロータコア30の外周面を構成する。保持面30aは、周方向に沿って並ぶ。保持面30aは、径方向と直交する面である。保持面30aには、接着剤などを介してそれぞれロータマグネット3bが固定される。また、ロータマグネット3bは、筒状のロータカバーによって固定されていてもよい。したがって、本実施形態のロータ3には、8つのロータマグネット3bが設けられる。8つのロータマグネット3bは、周方向に沿って磁極の向きを交互にして配置される。 なお、ロータコア30の保持面30aの数および、ロータ3に設けられるロータマグネット3bの数は一例であり、本実施形態に限定されない。
ロータコア30には、複数の貫通孔35が設けられる。本実施形態において、ロータコア30には、8つの貫通孔35が設けられる。貫通孔35は、軸方向に貫通する。また、複数の貫通孔35は、周方向に沿って等間隔に並ぶ。貫通孔35の内部は、空洞である。
ロータコア30には、平面視中央に位置する中央孔31が設けられる。中央孔31は、軸方向に貫通する。中央孔31は、中心軸Jを中心とする略円形である。中央孔31には、シャフト90が圧入される。
中央孔31の内周面には、複数の嵌合凸部32が設けられる。本実施形態において、中央孔31の内周面には、8つの嵌合凸部32が設けられる。嵌合凸部32の数は、ロータマグネット3bの数および貫通孔35の数と、一致する。また、1つの嵌合凸部32の径方向外側には、1つのロータマグネット3bが設けられる。 なお、本明細書において、「中央孔の内周面」とは、ロータコアにおいて中央孔を構成する面を意味する。
複数の嵌合凸部32は、周方向に沿って等間隔に並ぶ。嵌合凸部32は、径方向内側に突出する。嵌合凸部32は、径方向内側を向く先端面32aを有する。先端面32aは、中心軸Jを中心とする円弧形状で、軸方向に沿って一様に延びる。嵌合凸部32は、先端面32aにおいてシャフト90と接触する。
本実施形態において、1つの嵌合凸部32の径方向外側には1つの貫通孔35が設けられる。これにより、中央孔31にシャフト90を圧入する際に、ロータコア30が弾性変形しやすくなる。これによって、嵌合凸部32の径方向外側への変位が容易となる。結果的に、ロータコア30に対するシャフト90の圧入する際に発生する応力が軽減し、組み立て工程を容易とすることができる。加えて、嵌合凸部32と貫通孔35との間で、ロータコア30の弾性変形が促されることで、嵌合凸部32の先端面32aにおける接触する際に発生する圧力が安定化する。これにより、中央孔31におけるシャフト90の保持を安定させることができる。
本実施形態によれば、貫通孔35の内部は、空洞である。したがって、貫通孔35の内部に樹脂材料などが充填される場合と比較して、貫通孔35の径方向内側に位置する嵌合凸部32を変形させやすくすることができる。なお、貫通孔35の内部がロータコア30を構成する材料より弾性変形しやすい樹脂材料などで満たされていてもよい。このような場合、ロータコア30を構成する材料と、貫通孔35に充填された材料との弾性率の差に起因して、嵌合凸部32が径方向外側に変形しやすくなる。
図3は、ロータ3の部分断面図である。また、図4は、図3の領域IVの拡大図である。 図3に示すように、シャフト90の外周面90aには、複数(本実施形態において4つ)の溝部91が設けられる。複数の溝部91は、周方向に沿って等間隔に配置される。溝部91は、軸方向に沿って直線状に延びる。溝部91は、径方向において嵌合凸部32の先端面32aと対向する。
8つの嵌合凸部32は、4つの第1の嵌合凸部32Aと4つの第2の嵌合凸部32Bとを含む。第1の嵌合凸部32Aは、先端面32aにおいて溝部91と対向する。一方で、第2の嵌合凸部32Bは、先端面32aにおいて溝部91と対向しない。すなわち、第2の嵌合凸部32Bは、先端面32aの全域においてシャフト90の外周面90aに接触する。シャフト90の圧入前の状態において、第1の嵌合凸部32Aと第2の嵌合凸部32Bとは、同形状である。すなわち、シャフト90の圧入前の状態において、第1の嵌合凸部32Aと第2の嵌合凸部32Bとは、突出高さおよび周方向に沿う幅寸法が同一である。
図4に示すように、溝部91は、径方向内側に向かうに従い、周方向の幅が狭くなるV字状である。溝部91は、一対の側面91bと、底面91aと、を有する。一対の側面91bは、底面91aから径方向外側に延びる。一対の側面91bは、径方向外側に向かうに従い互いに離間する方向に延びる。底面91aは、径方向外側を向く。底面91aは、一対の側面91bの下端部同士を滑らかに繋ぐ。 なお、溝部91の断面形状は、本実施形態に限定されない。例えば溝部91の断面形状は、矩形状であっても、円弧形状であってもよい。
溝部91は、例えば、V字状の先端部を有する工具を、シャフト90の外周面90aに押し当てて軸方向に移動させることで成形することができる。これにより、工具押し当てられたシャフト90の外周面90aが塑性変形して、V字状の溝部91が成形される。また、このような工程を経て溝部91を成形する場合、溝部91の周方向両側に塑性変形による凸部が成形される。このため、溝部91の成形後に、シャフト90の外周面を研磨して、溝部91の周方向両側の凸部を除去することが好ましい。 なお、上述の溝部91の成形方法は、一例である。溝部91は、切削加工などの他の成形方法によって成形されていてもよい。
溝部91と対向する第1の嵌合凸部32Aの先端面32aは、シャフト90との接触により変形して溝部91内に侵入する変形凸部32bと、変形凸部32bの周方向両側に位置する一対の接触部32cを有する。第1の嵌合凸部32Aの先端面32aは、接触部32cにおいてシャフト90の外周面90aと接触する。
中央孔31にシャフト90が圧入されると、嵌合凸部32は径方向外側に向かって弾性変形する。第1の嵌合凸部32Aの先端面32aは、溝部91と対向する領域において、シャフト90の外周面90aから応力を受けていない。このため、第1の嵌合凸部32Aの先端面32aにおいて、溝部91と対向する領域は、他の領域と比較して弾性変形の割合が小さくなる。これにより、第1の嵌合凸部32Aの先端面32aには、変形凸部32bが設けられる。
なお、図4は、変形凸部32bを強調する目的で、溝部91の深さ寸法に対し変形凸部32bの径方向の寸法(高さ寸法)の比率を実際より大きくして図示したものである。本実施形態において、溝部91の深さ寸法は、例えばシャフト90の直径の10%以下である。これに対し、変形凸部の高さ寸法は、例えば、1μm以上30μm以下である。
第1の嵌合凸部32Aの先端面32aであって、シャフト90の外周面90aと接触する領域(接触部32c)には、面圧が生じる。一方で、第1の嵌合凸部32Aの先端面32aであって、溝部91と対向する領域(変形凸部32b)には、面圧が生じない。上述したように、溝部91は、軸方向に沿って延びる。本実施形態によれば、先端面32aには、面圧が極端に変化する境界部が軸方向に沿って直線状に設けられる。先端面32aに面圧が極端に変化する境界部が設けられることで、境界部においてシャフト90が変形して、第1の嵌合凸部32Aの先端面32aがシャフト90の外周面90aに対して滑ることを抑制でき、ロータコア30とシャフトと90との空転が抑制される。
また、本実施形態によれば、第1の嵌合凸部32Aの先端面32aが、溝部91内に侵入する変形凸部32bを有する。変形凸部32bは、根元部において溝部91の側面91bに接触する。変形凸部32bは、第1の嵌合凸部32Aがシャフト90の外周面90aに対し周方向に相対的に移動しようとする際に、アンカーとして機能する。このため、第1の嵌合凸部32Aの先端面32aがシャフト90の外周面90aに対して滑ることを抑制でき、ロータコア30とシャフトと90との空転が抑制される。
本実施形態によれば、変形凸部32bの先端と溝部91の底面91aとの間には、隙間が設けられる。このため、第1の嵌合凸部32Aの先端面32aを径方向内側に十分に変形させて、変形凸部32bを設けることができる。
本実施形態によれば、ロータコア30は、中央孔31の内周面に設けられた嵌合凸部32の先端面32aにおいて、シャフト90の外周面90aと接触する。このため、中央孔31の内周面全体がシャフト90の外周面90aに接触する場合と比較して、接触面の面圧が高くなる。結果的に、溝部91と対向する第1の嵌合凸部32Aの先端面32aの一部が、変形凸部32bとして溝部91の内部に侵入しやすくなり、ロータコア30とシャフト90との空転を効果的に抑制できる。
本実施形態において、変形凸部32bの周方向両側に位置する一対の接触部32cの周方向長さd2、d2は、互いに等しいことが好ましい。これにより、シャフト90の回転方向に関わらず、シャフト90に対してロータコア30が空転することを効果的に抑制できる。 また、変形凸部32bの周方向長さd1は、一対の接触部32cの周方向長さd2、d2の総和より短いことが好ましい。一対の接触部32cの周方向長さd2、d2の総和を長くすると、シャフト90に対するロータコア30の位置決め精
度が高まる。すなわち、本実施形態によれば、シャフト90に対してロータコア30が空転することを抑制しつつ、ロータコア30の位置決め精度を高めることができる。 また、変形凸部32bの周方向長さd1を、一対の接触部32cの周方向長さd2、d2の総和より長くしてもよい。この場合には、変形凸部32bによる空転抑制効果を高めることができる。
度が高まる。すなわち、本実施形態によれば、シャフト90に対してロータコア30が空転することを抑制しつつ、ロータコア30の位置決め精度を高めることができる。 また、変形凸部32bの周方向長さd1を、一対の接触部32cの周方向長さd2、d2の総和より長くしてもよい。この場合には、変形凸部32bによる空転抑制効果を高めることができる。
図3に示すように、第1の嵌合凸部32Aと第2の嵌合凸部32Bとは、周方向に沿って交互に並ぶ。上述したように、第1の嵌合凸部32Aの先端面32aは、溝部91と対向する領域で径方向内側に変形して変形凸部32bを構成する。これに伴い、第1の嵌合凸部32Aの先端面32aは、シャフト90の外周面90aと接触する円弧形状に歪みが生じる。このため、全ての嵌合凸部32の先端面32aが溝部91と対向する場合には、シャフト90とロータコア30との同軸度の低下を招く虞がある。 しかしながら、本実施形態によれば、嵌合凸部32が、先端面32aにおいて溝部91と対向する第1の嵌合凸部32Aと溝部91と対向しない第2の嵌合凸部32Bとを含む。このため、第1の嵌合凸部32Aにおいて、ロータコア30とシャフト90との空転を抑制するととともに、第2の嵌合凸部32Bにおいて、ロータコア30とシャフト90との同軸度を確保することができる。
本実施形態によれば、複数の第1の嵌合凸部32Aは、周方向に等間隔に配置される。このため、ロータコア30の対称性を保つことができ、ロータコア30とシャフト90との同軸度のばらつきを効果的に抑制できる。さらに、本実施形態によれば、第1の嵌合凸部32Aと第2の嵌合凸部32Bとは、周方向に交互に配置される。このため、ロータコア30とシャフト90との同軸度のばらつきを抑制する効果を高めることができる。
なお、本実施形態では、シャフト90の外周面90aに4つの溝部91が設けられ、1つの溝部91が1つの嵌合凸部32に対向する場合を例示した。しかしながら、溝部91と嵌合凸部32との関係は本実施形態に限定されない。例えば、複数の溝部91が、1つの嵌合凸部32と径方向に対向していてもよい。また、溝部91は、シャフト90の外周面90aに少なくとも1つ設けられていればよい。すなわち、複数の嵌合凸部32は、溝部91と対向する第1の嵌合凸部32Aを少なくとも1つ含んでいればよい。
(変形例)
図5は、上述の実施形態のモータ1に採用可能な変形例のロータコア130の平面図である。図5において、ロータコア130の外周面130aに固定されるロータマグネット103bを二点鎖線で図示する。 なお、上述の実施形態と同一態様の構成要素については、同一符号を付し、その説明を省略する。
図5は、上述の実施形態のモータ1に採用可能な変形例のロータコア130の平面図である。図5において、ロータコア130の外周面130aに固定されるロータマグネット103bを二点鎖線で図示する。 なお、上述の実施形態と同一態様の構成要素については、同一符号を付し、その説明を省略する。
変形例のロータコア130は、軸方向に沿って一様な断面で延びる。ロータコア130は、軸方向から見て中心軸Jを中心とする円形である。すなわち、本実施形態において、ロータコア130は、円柱状である。ロータコア130は、径方向外側を向く外周面130aを有する。外周面130aには、接着剤などを介してロータマグネット103bが固定される。なお、ロータマグネット103bは、筒状のロータカバーによって固定されていてもよい。
本変形例のロータマグネット103bは、環状である。また、ロータマグネット103bは、周方向に沿ってN極とS極とが交互に複数並んで着磁されている。すなわち、ロータマグネット103bは、周方向に沿って磁極が並ぶ環状である。ロータマグネット103bのN極およびS極の磁極は、それぞれ螺旋状に着磁されていてもよい。このように着磁することで、モータのコギングトルクを低減できる。
以上に、本発明の様々な実施形態およびその変形例を説明したが、それぞれの実施形態およびその変形例における各構成およびそれらの組み合わせ等は一例であり、本発明の趣旨から逸脱しない範囲内で、構成の付加、省略、置換およびその他の変更が可能である。また、本発明は実施形態によって限定されることはない。
上述の様々な実施形態およびその変形例のロータおよびロータを備えたモータは、電動パワーステアリング装置に搭載される。また、これらのロータおよびモータは、電動パワーステアリング装置に限られず、いかなる装置に搭載されていてもよい。
1…モータ、3…ロータ、3b,103b…ロータマグネット、10…ステータ、30,130…ロータコア、31…中央孔、32…嵌合凸部、32A…第1の嵌合凸部、32B…第2の嵌合凸部、32a…先端面、32b…変形凸部、35…貫通孔、90…シャフト、90a…外周面、91…溝部、91a…底面、J…中心軸
Claims (11)
- インナーロータ型のモータに用いられるロータであって、
上下方向に延びる中心軸を中心とするシャフトと、
前記シャフトに固定されたロータコアと、
前記ロータコアに支持されるロータマグネットと、を備え、
前記ロータコアには、前記シャフトが圧入される中央孔が設けられ、
前記中央孔の内周面には、周方向に沿って並び径方向内側に突出し先端面で前記シャフトと接触する複数の嵌合凸部が設けられ、
前記シャフトの外周面には、軸方向に沿って延び、径方向において前記先端面と対向する溝部が設けられる、ロータ。 - 前記溝部と対向する前記先端面は、前記シャフトとの接触により変形して前記溝部内に侵入する変形凸部を有する、請求項1に記載のロータ。
- 前記溝部の底面と前記変形凸部の先端との間には、隙間が設けられる、請求項2に記載のロータ。
- 複数の前記嵌合凸部は、
前記先端面において前記溝部と対向する第1の嵌合凸部と、
前記先端面の全域において前記シャフトの外周面に接触する第2の嵌合凸部と、を含み、
複数の前記第1の嵌合凸部は、周方向に等間隔に配置される、
請求項1~3の何れか一項に記載のロータ。 - 前記第1の嵌合凸部と前記第2の嵌合凸部とは、周方向に交互に配置される、請求項4に記載のロータ。
- 前記ロータコアには、
軸方向に貫通し周方向に沿って並ぶ複数の貫通孔が設けられ、
それぞれの前記貫通孔は、1つの前記嵌合凸部の径方向外側に位置する、
請求項1~5の何れか一項に記載のロータ。 - 前記貫通孔の内部が空洞である、請求項6に記載のロータ。
- 複数の前記ロータマグネットを備え、
前記ロータマグネットの数と、前記嵌合凸部の数と、が一致する、
請求項1~7の何れか一項に記載のロータ。 - 前記ロータマグネットが、周方向に沿って磁極が並ぶ環状である、請求項1~7の何れか一項に記載のロータ。
- 前記ロータマグネットは、前記ロータコアの外周面に固定される、請求項1~9の何れか一項に記載のロータ。
- 請求項1~10の何れか一項に記載されたロータと、
前記ロータの径方向外側に位置するステータと、を有する、モータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019560895A JPWO2019123952A1 (ja) | 2017-12-18 | 2018-11-20 | ロータおよびモータ |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-241994 | 2017-12-18 | ||
| JP2017241994 | 2017-12-18 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019123952A1 true WO2019123952A1 (ja) | 2019-06-27 |
Family
ID=66994675
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/042841 WO2019123952A1 (ja) | 2017-12-18 | 2018-11-20 | ロータおよびモータ |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2019123952A1 (ja) |
| WO (1) | WO2019123952A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111884370A (zh) * | 2020-06-16 | 2020-11-03 | 广东威灵电机制造有限公司 | 一种转子组件和电机 |
| WO2021144849A1 (ja) * | 2020-01-14 | 2021-07-22 | 三菱電機株式会社 | 回転電機 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55145847U (ja) * | 1979-04-09 | 1980-10-20 | ||
| JP2003111326A (ja) * | 2001-09-26 | 2003-04-11 | Asmo Co Ltd | 回転電機用電機子及び回転電機 |
| JP2009189105A (ja) * | 2008-02-04 | 2009-08-20 | Mitsuba Corp | 電動モータ |
| JP2015047051A (ja) * | 2013-08-29 | 2015-03-12 | 株式会社デンソー | 回転子、および、これを用いた回転電機 |
| JP2015073387A (ja) * | 2013-10-03 | 2015-04-16 | 日立オートモティブシステムズ株式会社 | 回転子鉄心、回転子、および、回転電機 |
| JP2015097436A (ja) * | 2013-11-15 | 2015-05-21 | 株式会社デンソー | 回転電機のロータ及びそのロータを備えた回転電機 |
-
2018
- 2018-11-20 WO PCT/JP2018/042841 patent/WO2019123952A1/ja active Application Filing
- 2018-11-20 JP JP2019560895A patent/JPWO2019123952A1/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55145847U (ja) * | 1979-04-09 | 1980-10-20 | ||
| JP2003111326A (ja) * | 2001-09-26 | 2003-04-11 | Asmo Co Ltd | 回転電機用電機子及び回転電機 |
| JP2009189105A (ja) * | 2008-02-04 | 2009-08-20 | Mitsuba Corp | 電動モータ |
| JP2015047051A (ja) * | 2013-08-29 | 2015-03-12 | 株式会社デンソー | 回転子、および、これを用いた回転電機 |
| JP2015073387A (ja) * | 2013-10-03 | 2015-04-16 | 日立オートモティブシステムズ株式会社 | 回転子鉄心、回転子、および、回転電機 |
| JP2015097436A (ja) * | 2013-11-15 | 2015-05-21 | 株式会社デンソー | 回転電機のロータ及びそのロータを備えた回転電機 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021144849A1 (ja) * | 2020-01-14 | 2021-07-22 | 三菱電機株式会社 | 回転電機 |
| CN111884370A (zh) * | 2020-06-16 | 2020-11-03 | 广东威灵电机制造有限公司 | 一种转子组件和电机 |
| CN111884370B (zh) * | 2020-06-16 | 2021-08-31 | 广东威灵电机制造有限公司 | 一种转子组件和电机 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2019123952A1 (ja) | 2020-12-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9893573B2 (en) | Rotor of motor and such motor | |
| US9472984B2 (en) | Rotor for rotating electric machine | |
| CN107852045B (zh) | 旋转电动机 | |
| JP2014236592A (ja) | 回転電機用ロータおよびその製造方法 | |
| JP6189699B2 (ja) | 回転子鉄心、回転子、および、回転電機 | |
| JP2018201303A (ja) | モータ | |
| JPWO2016185829A1 (ja) | 回転子、回転電機および回転子の製造方法 | |
| JP2008312321A (ja) | 回転子および回転電機 | |
| JP2016046844A (ja) | 回転電機の回転子 | |
| JP2015154665A (ja) | ロータ及びロータの製造方法 | |
| WO2019123952A1 (ja) | ロータおよびモータ | |
| US11277053B2 (en) | Rotor, motor, and method for manufacturing rotor | |
| JP2013219931A (ja) | ロータ、これを備えた回転電機及びロータの製造方法 | |
| JP2015220846A (ja) | 回転電機の回転子 | |
| KR20120116608A (ko) | 모터의 로터 | |
| JP5495045B2 (ja) | 回転電機の回転子 | |
| JP2010206944A (ja) | 永久磁石電動機 | |
| JP5917193B2 (ja) | ロータ、モータ及びロータの製造方法 | |
| JP5879848B2 (ja) | 埋込磁石形回転電機のロータ | |
| WO2019123950A1 (ja) | ロータおよびモータ | |
| JP2013187943A (ja) | 永久磁石型モータ及びこのモータのロータ | |
| JP2012044789A (ja) | 回転電機およびその製造方法 | |
| JP2015104176A (ja) | 回転電機ロータ | |
| WO2019123962A1 (ja) | ロータおよびモータ | |
| JP2020178386A (ja) | ロータ及び表面磁石型回転電機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18892738 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2019560895 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18892738 Country of ref document: EP Kind code of ref document: A1 |