WO2018207782A1 - 駐車空間検出装置 - Google Patents
駐車空間検出装置 Download PDFInfo
- Publication number
- WO2018207782A1 WO2018207782A1 PCT/JP2018/017802 JP2018017802W WO2018207782A1 WO 2018207782 A1 WO2018207782 A1 WO 2018207782A1 JP 2018017802 W JP2018017802 W JP 2018017802W WO 2018207782 A1 WO2018207782 A1 WO 2018207782A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- parking space
- vehicle
- width
- parking
- detection device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images


Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/14—Traffic control systems for road vehicles indicating individual free spaces in parking areas
- G08G1/141—Traffic control systems for road vehicles indicating individual free spaces in parking areas with means giving the indication of available parking spaces
- G08G1/143—Traffic control systems for road vehicles indicating individual free spaces in parking areas with means giving the indication of available parking spaces inside the vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0134—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to imminent contact with an obstacle, e.g. using radar systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/06—Automatic manoeuvring for parking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/027—Parking aids, e.g. instruction means
- B62D15/028—Guided parking by providing commands to the driver, e.g. acoustically or optically
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
- G06V20/584—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads of vehicle lights or traffic lights
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
- G06V20/586—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads of parking space
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/165—Anti-collision systems for passive traffic, e.g. including static obstacles, trees
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/168—Driving aids for parking, e.g. acoustic or visual feedback on parking space
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/806—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for aiding parking
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2015/932—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles for parking operations
- G01S2015/933—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles for parking operations for measuring the dimensions of the parking space when driving past
- G01S2015/934—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles for parking operations for measuring the dimensions of the parking space when driving past for measuring the depth, i.e. width, not length, of the parking space
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2015/932—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles for parking operations
- G01S2015/933—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles for parking operations for measuring the dimensions of the parking space when driving past
- G01S2015/935—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles for parking operations for measuring the dimensions of the parking space when driving past for measuring the contour, e.g. a trajectory of measurement points, representing the boundary of the parking space
Definitions
- This disclosure relates to a technique for detecting a parking space in which the host vehicle is parked.
- Patent Document 1 As a technique for detecting a parking space where the host vehicle can be parked, for example, a technique described in Patent Document 1 below is known.
- a distance to another vehicle parked on both sides of a parking space is detected using a sensor such as an ultrasonic sensor, a laser radar, or a millimeter wave radar.
- a technique for specifying a contour shape is described.
- the distance on the entrance side between other vehicles parked on both sides of the parking space is defined as the width of the parking space. It was found that the side distance was not taken into account.
- the width on the back side may be narrower than the width on the entrance side of the parking space. is there.
- the vehicle cannot be parked in the parking space because the width on the back side of the parking space is narrow. A challenge has been found.
- One aspect of the present disclosure is a parking space detection device that detects a parking space of the host vehicle, and includes a vehicle determination unit, a width calculation unit, and a parking determination unit.
- the vehicle determination unit determines whether there is another vehicle on at least one side of the parking space based on the search information acquired from the vehicle-mounted search unit that searches for the parking space. If the vehicle determination unit determines that there is another vehicle on at least one side of each side of the parking space, the width calculation unit calculates the width on the entrance side of the parking space and the width on the back side of the parking space based on the search information. . The parking determination unit determines whether the host vehicle can be parked in the parking space based on both the entrance-side width and the back-side width calculated by the width calculation unit and the size of the host vehicle.
- the width on the back side of the parking space is narrower than the width on the entrance side, and the width on the entrance side and the width on the back side of the parking space are different. Sometimes, it can be determined with high accuracy whether or not the vehicle can be parked in the parking space.
- a parking space detection system 2 shown in FIG. 1 includes a front ultrasonic sensor 10, a right ultrasonic sensor 12, a left ultrasonic sensor 14, a rear ultrasonic sensor 16, a front camera 20, a right camera 22, a left camera 24, and a rear camera 26.
- the parking space detection device 30 is provided.
- the front ultrasonic sensor 10, the right ultrasonic sensor 12, the left ultrasonic sensor 14, and the rear ultrasonic sensor 16 emit ultrasonic waves as exploration waves in the forward direction, the right direction, the left direction, and the rear direction of the host vehicle, respectively. Receive the reflected wave.
- the front camera 20, the right camera 22, the left camera 24, and the rear camera 26 respectively capture the forward direction, the right direction, the left direction, and the rear direction of the host vehicle and output image data.
- the cameras 20 to 26 capture images using a wide-angle lens.
- the parking space detection device 30 includes an ultrasonic processing unit 40, an image distortion correction unit 50, an image processing unit 52, a memory 54, and an in-vehicle signal processing unit 60. For example, when the driver turns on the parking assistance switch, the parking space detection device 30 starts the parking space detection process.
- the parking space detection device 30 is configured by a microcomputer including a CPU, a ROM, a RAM, a flash memory, and the like. ROM, RAM, and flash memory are semiconductor memories that are non-transitional tangible recording media.
- the parking space detection device 30 may be equipped with one microcomputer or a plurality of microcomputers.
- the various functions of the parking space detection device 30 are realized by the CPU executing a program stored in a non-transitional physical recording medium. When the CPU executes this program, a method corresponding to the program is executed.
- the method for realizing various functions of the parking space detection device 30 is not limited to software, and hardware in which some or all of the elements are combined with a logic circuit, an analog circuit, or the like may be used.
- the ultrasonic processing unit 40 irradiates, as search information, an ultrasonic irradiation direction and ultrasonic waves from the front ultrasonic sensor 10, the right ultrasonic sensor 12, the left ultrasonic sensor 14, and the rear ultrasonic sensor 16. And the time until the reflected wave is received. Then, based on the acquired search information, the ultrasonic processing unit 40 detects whether or not an object exists in the irradiation direction and, if there is an object, the distance to the object.
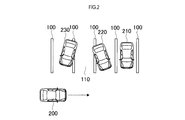
- FIG. 2 shows an example in which three other vehicles 210, 220, and 230 are parked in the parking space partitioned by the white line 100.
- the ultrasonic processing unit 40 is based on the above-described search information acquired mainly from the left and right ultrasonic sensors, and the other vehicles 210, 220, 230 with respect to the host vehicle 200. And the distance to the other vehicles 210, 220, and 230 are detected.
- the ultrasonic processing unit 40 outputs the directions of the other vehicles 210, 220, and 230 and the distances to the other vehicles 210, 220, and 230 to the image processing unit 52. From the direction of the other vehicles 210, 220, 230 and the distance to the other vehicles 210, 220, 230, the relative positions of the other vehicles 210, 220, 230 with respect to the host vehicle 200 can be calculated.
- the image distortion correction unit 50 corrects image distortion included in image data output by the front camera 20, the right camera 22, the left camera 24, and the rear camera 26 based on the characteristics of the wide-angle lens of each camera. .
- the image processing unit 52 stores the image data corrected by the image distortion correction unit 50 in the memory 54 for each frame.
- the memory 54 is composed of, for example, a ring buffer, and the oldest frame is overwritten by the latest frame.
- the image processing unit 52 uses the direction of the other vehicles 210, 220, and 230 and the distance to the other vehicles 210, 220, and 230, so that the other vehicles 210, 220, and 230 Calculate the position.
- the image processing unit 52 calculates the position of the other vehicle 210, 220, 230 in the planar coordinate system from the relative position of the other vehicle 210, 220, 230 with respect to the own vehicle 200 and the position of the own vehicle 200 in the planar coordinate system described later. To do.
- the ultrasonic processing unit 40 may calculate the relative positions of the other vehicles 210, 220, and 230 with respect to the host vehicle 200. Furthermore, the ultrasonic processing unit 40 may calculate the positions of the other vehicles 210, 220, and 230 in the plane coordinate system.
- the image processing unit 52 Based on the position of the other vehicles 210, 220, and 230, the image processing unit 52 includes a parking space 110 between the other vehicle 220 and the other vehicle 230 as a candidate parking space in which the host vehicle 200 can park. Is detected. Then, the image processing unit 52 calculates the width Wf on the entrance side and the width Wr on the back side of the parking space 110, and determines whether or not the host vehicle 200 can be parked in the parking space 110. Details of the calculation of the entrance-side width Wf and the back-side width Wr will be described later.
- the in-vehicle signal processing unit 60 acquires the vehicle speed from the vehicle speed sensor and acquires the steering angle from the steering angle sensor.
- the in-vehicle signal processing unit 60 calculates the moving direction and the moving amount of the host vehicle from the origin of the planar coordinate system based on the acquired vehicle speed and steering angle.
- the origin of the plane coordinate system for example, a reference position such as the center position of the front wheel axle of the host vehicle when the parking assist switch is turned on and the parking space detection process is started is set.
- the in-vehicle signal processing unit 60 calculates the position of the host vehicle in the plane coordinate system from the calculated moving direction and moving amount.
- the in-vehicle signal processing unit 60 outputs the plane coordinate system and the calculated position of the host vehicle to the image processing unit 52.
- the ultrasonic processing unit 40 detects the direction of an object existing around the host vehicle and the distance from the host vehicle based on the output signals of the ultrasonic sensors 10 to 16.
- the image distortion correction unit 50 corrects distortion of image data captured by the front camera 20, the right camera 22, the left camera 24, and the rear camera 26 based on the characteristics of the wide-angle lens.
- the image processing unit 52 determines whether an object exists on at least one of both sides of the parking space based on the detection result of the ultrasonic processing unit 40 in S400. When the determination in S404 is No, that is, when no object exists on both sides of the parking space, the image processing unit 52 determines whether or not white lines exist on both sides of the parking space in S406.
- the image processing unit 52 in S408 based on the image data acquired from the image distortion correction unit 50, It is determined by processing such as pattern matching whether or not an object existing in at least one of the vehicles is a vehicle.
- the image processing unit 52 in S410 indicates that the object present on at least one side of the parking space is not a vehicle. Is output to the traveling control device 70.
- the image processing unit 52 determines whether the vehicle exists on both sides of the parking space.
- the image processing unit 52 determines whether the vehicle is present on one side of the parking space and one is a white line, or the vehicle is not present on both sides of the parking space and the parking space is partitioned by a white line.
- a white line In the planar coordinate system, an entrance side position that is a start position of a white line when viewed from the host vehicle and a back side position that is an end position of the white line are calculated. After the completion of S414, the process proceeds to S416.
- the image processing unit 52 determines that the entrance side position where the tire on the entrance side of the vehicle and the ground contact surface contact each other and the back side where the tire on the back side contacts the ground contact surface when the vehicle exists on at least one of both sides of the parking space.
- the side position is calculated in the plane coordinate system.
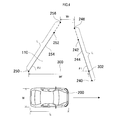
- the image processing unit 52 uses the equation of the straight line 244 passing through the right entrance side position 240 and the back side position 242 of the parking space 110, and the left side entrance side position 250 and the back side position 252.
- the equation of the straight line 254 passing through is calculated.
- the image processing unit 52 passes through the entrance side position 250 on the back side of the parking space 110 out of the entrance side positions 240 and 250, for example, as the inclination angles formed by the straight lines 244 and 254 with the width direction of the parking space 110, respectively.
- the inclination angles ⁇ 1 and ⁇ 2 formed by the straight line 300 and the straight lines 244 and 254 extending in the width direction of the parking space 110 toward the straight line 244 are calculated by image analysis.
- the image processing unit 52 determines the width of the parking space 110 at the entrance side position 250 based on the coordinates of the entrance side position 250 and the coordinates of the intersection 302 of the straight line 300 and the straight line 244, for example, the entrance side width Wf. Calculate as
- the image processing unit 52 determines whether the entrance-side width Wf is greater than a predetermined threshold value 1.
- a predetermined threshold value 1 for example, a value obtained by multiplying the vehicle width W of the host vehicle 200 by a margin rate K1 when the host vehicle 200 enters the entrance of the parking space 110 is set.
- K1 is set to a value greater than 1 and less than 2.
- the image processing unit 52 calculates the back-side width Wr of the parking space 110 in S426 as follows.
- the image processing unit 52 terminates on the straight lines 244 and 254 of line segments that extend the full length L of the host vehicle 200 from the entrance side positions 240 and 250 on both sides of the parking space 110 toward the back side positions 242 and 252.
- the width of the parking space 110 when the positions 246 and 256 are viewed from the entrance side of the parking space 110 is calculated as the width Wr on the back side.
- the image processing unit 52 determines whether or not the back side width Wr is larger than a predetermined threshold value 2.
- a predetermined threshold value 2 for example, a value obtained by multiplying the vehicle width W of the host vehicle 200 by a margin rate K2 when the host vehicle 200 enters the back side of the parking space 110 is set.
- the threshold value 1 and the threshold value 2 may be the same value, or may be different values depending on the shape of the host vehicle 200.
- the image processing unit 52 determines that it is difficult for the host vehicle 200 to park in the parking space 110, and performs this processing. Exit.
- the image processing unit 52 determines that the host vehicle 200 can be parked in the parking space 110. In this case, in S430, the image processing unit 52 determines the inclination angles ⁇ 1, ⁇ 2, the entrance-side width Wf, the back-side width Wr, the entrance-side width Wf, the back-side width Wr, and the tilt angles ⁇ 1, ⁇ 2. For example, the coordinates of the entrance side position 250 on the back side of the parking space 110 are used as the position of at least one vertex of the quadrangle formed by the traveling control device 70 that controls steering, braking, and vehicle speed of the host vehicle 200. Output.
- the traveling control device 70 includes the inclination angles ⁇ 1 and ⁇ 2 output from the parking space detection device 30, the entrance-side width Wf, the back-side width Wr, the entrance-side width Wf, the back-side width Wr, and the tilt angle ⁇ 1. , ⁇ 2 and the coordinates of the position of at least one of the vertices of the quadrangle, the traveling of the host vehicle 200 parked in the parking space 110 is controlled.
- the parking space detection device 30 executes the parking space detection process shown in the flowchart of FIG. 3 for each frame of image data captured by the cameras 20 to 26 until a parking space where the host vehicle can be parked is detected. If a parking space that can be parked cannot be detected even if the parking space detection process is executed for all the parking space candidates, the parking space detection device 30 informs the driver that there is no parking space by voice or an image display lamp. To do.
- the width of the entrance side of the parking space is larger than the width of the host vehicle, even if parking in the parking space is started, the width of the rear side of the parking space is equal to or less than the width of the host vehicle during parking. It is possible to suppress the inability to park. Thereby, since it can suppress stopping parking and detecting another parking space while approaching into a parking space, the time required in order to detect a parking space can be shortened.
- the travel control device 70 that controls the steering, braking, and vehicle speed of the host vehicle 200 is configured with the inclination angles ⁇ ⁇ b> 1 and ⁇ ⁇ b> 2 and the entrance-side width Wf. And the rear width Wr are acquired from the parking space detection device 30.
- the traveling control device 70 can park the host vehicle 200 in the parking space 110 based on the acquired inclination angles ⁇ 1 and ⁇ 2, the entrance-side width Wf, and the back-side width Wr.
- the front ultrasonic sensor 10, the right ultrasonic sensor 12, the left ultrasonic sensor 14, the rear ultrasonic sensor 16, the front camera 20, the right camera 22, the left camera 24, and the rear camera 26 are search units.
- the ultrasonic processing unit 40 corresponds to the vehicle determination unit
- the image processing unit 52 corresponds to the vehicle determination unit, the width calculation unit, the parking determination unit, and the notification unit.
- the parking space detection device 30 reflects the irradiation direction of the ultrasonic wave acquired from the front ultrasonic sensor 10, the right ultrasonic sensor 12, the left ultrasonic sensor 14, and the rear ultrasonic sensor 16, and the reflection after the ultrasonic wave is irradiated.
- the time until the wave is received corresponds to the first search information
- the image data acquired by the parking space detection device 30 from the front camera 20, the right camera 22, the left camera 24, and the rear camera 26 is the second search information.
- S400 to S404, S408, and S412 correspond to the process of the vehicle determination unit
- S414 to S422 and S426 correspond to the process of the width calculation unit
- S424 and S428 correspond to the process of the parking determination unit
- S430 corresponds to the processing of the notification unit.
- an ultrasonic sensor that irradiates ultrasonic waves as exploration waves is used as a search unit for searching a parking space.
- a millimeter wave radar that emits a millimeter wave as a search wave or a LIDAR that emits a laser as a search wave may be used as the search unit.
- the position of the host vehicle in the plane coordinate system is calculated based on the vehicle speed and the steering angle of the host vehicle.
- the absolute position of the host vehicle positioning based on the positioning signal is set to the position of the host vehicle in the plane coordinate system. May be used as
- a plurality of functions of one constituent element in the above embodiment may be realized by a plurality of constituent elements, or a single function of one constituent element may be realized by a plurality of constituent elements.
- a plurality of functions possessed by a plurality of constituent elements may be realized by one constituent element, or a single function realized by a plurality of constituent elements may be realized by one constituent element.
- at least a part of the configuration of the above embodiment may be added to or replaced with the configuration of the other embodiment.
- all the aspects contained in the technical idea specified only by the wording described in the claim are embodiment of this indication.
- a parking space detection system 2 including the parking space detection device 30 as a constituent element, a parking space detection program for causing a computer to function as the parking space detection device 30, and this parking
- the present disclosure can also be realized in various forms such as a recording medium in which a space detection program is recorded and a parking space detection method.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Mechanical Engineering (AREA)
- Acoustics & Sound (AREA)
- Computer Networks & Wireless Communication (AREA)
- Transportation (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Automation & Control Theory (AREA)
- Geometry (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/678,249 US11024174B2 (en) | 2017-05-09 | 2019-11-08 | Parking space detection apparatus |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-092920 | 2017-05-09 | ||
| JP2017092920A JP6700216B2 (ja) | 2017-05-09 | 2017-05-09 | 駐車空間検出装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US16/678,249 Continuation US11024174B2 (en) | 2017-05-09 | 2019-11-08 | Parking space detection apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018207782A1 true WO2018207782A1 (ja) | 2018-11-15 |
Family
ID=64104764
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/017802 Ceased WO2018207782A1 (ja) | 2017-05-09 | 2018-05-08 | 駐車空間検出装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11024174B2 (https=) |
| JP (1) | JP6700216B2 (https=) |
| WO (1) | WO2018207782A1 (https=) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109559555A (zh) * | 2018-12-21 | 2019-04-02 | 联创汽车电子有限公司 | 车位识别系统及其识别方法 |
| CN110634319A (zh) * | 2019-09-20 | 2019-12-31 | 哈工大机器人集团重庆普耀信息产业发展有限公司 | 智慧停车云服务系统 |
| US11017246B2 (en) | 2019-04-22 | 2021-05-25 | Clarion Co., Ltd. | Image processing device and image processing method |
| CN114706070A (zh) * | 2022-02-22 | 2022-07-05 | 惠州市德赛西威智能交通技术研究院有限公司 | 一种基于4d毫米波雷达的自动泊车车位搜索方法和系统 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10583779B2 (en) * | 2017-10-02 | 2020-03-10 | Magna Electronics Inc. | Parking assist system using backup camera |
| JP7135339B2 (ja) * | 2018-02-28 | 2022-09-13 | 株式会社デンソー | 車両に搭載される撮像システム、対象物識別装置、および対象物識別方法 |
| JP7323356B2 (ja) * | 2019-06-28 | 2023-08-08 | フォルシアクラリオン・エレクトロニクス株式会社 | 駐車支援装置及び駐車支援方法 |
| JP2022154517A (ja) * | 2021-03-30 | 2022-10-13 | パナソニックIpマネジメント株式会社 | 駐車支援装置および駐車支援方法 |
| CN114333405B (zh) * | 2021-12-30 | 2023-10-31 | 阿波罗智联(北京)科技有限公司 | 用于辅助车辆停车的方法 |
| CN114882701B (zh) * | 2022-04-28 | 2023-01-24 | 上海高德威智能交通系统有限公司 | 车位检测方法、装置、电子设备及机器可读存储介质 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007322357A (ja) * | 2006-06-05 | 2007-12-13 | Fujitsu Ltd | 距離測定プログラム、距離測定装置、距離測定方法 |
| WO2010140458A1 (ja) * | 2009-06-03 | 2010-12-09 | ボッシュ株式会社 | 駐車支援装置 |
| JP2012017021A (ja) * | 2010-07-08 | 2012-01-26 | Panasonic Corp | 駐車支援装置および車両 |
| JP2013220745A (ja) * | 2012-04-17 | 2013-10-28 | Nippon Soken Inc | 駐車空間検知装置 |
| JP2014094726A (ja) * | 2012-11-12 | 2014-05-22 | Nippon Soken Inc | 駐車支援装置 |
| JP2017019435A (ja) * | 2015-07-13 | 2017-01-26 | 日産自動車株式会社 | 駐車支援装置及び駐車支援方法 |
| JP2017222309A (ja) * | 2016-06-17 | 2017-12-21 | 日産自動車株式会社 | 駐車支援方法および装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4769625B2 (ja) * | 2006-04-25 | 2011-09-07 | トヨタ自動車株式会社 | 駐車支援装置及び駐車支援方法 |
| JP5511431B2 (ja) * | 2010-02-22 | 2014-06-04 | 本田技研工業株式会社 | 駐車支援装置 |
| US9146898B2 (en) * | 2011-10-27 | 2015-09-29 | Magna Electronics Inc. | Driver assist system with algorithm switching |
| JP5786775B2 (ja) | 2012-03-16 | 2015-09-30 | 株式会社デンソー | 駐車支援装置 |
| JP6724425B2 (ja) * | 2016-03-04 | 2020-07-15 | アイシン精機株式会社 | 駐車支援装置 |
-
2017
- 2017-05-09 JP JP2017092920A patent/JP6700216B2/ja active Active
-
2018
- 2018-05-08 WO PCT/JP2018/017802 patent/WO2018207782A1/ja not_active Ceased
-
2019
- 2019-11-08 US US16/678,249 patent/US11024174B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007322357A (ja) * | 2006-06-05 | 2007-12-13 | Fujitsu Ltd | 距離測定プログラム、距離測定装置、距離測定方法 |
| WO2010140458A1 (ja) * | 2009-06-03 | 2010-12-09 | ボッシュ株式会社 | 駐車支援装置 |
| JP2012017021A (ja) * | 2010-07-08 | 2012-01-26 | Panasonic Corp | 駐車支援装置および車両 |
| JP2013220745A (ja) * | 2012-04-17 | 2013-10-28 | Nippon Soken Inc | 駐車空間検知装置 |
| JP2014094726A (ja) * | 2012-11-12 | 2014-05-22 | Nippon Soken Inc | 駐車支援装置 |
| JP2017019435A (ja) * | 2015-07-13 | 2017-01-26 | 日産自動車株式会社 | 駐車支援装置及び駐車支援方法 |
| JP2017222309A (ja) * | 2016-06-17 | 2017-12-21 | 日産自動車株式会社 | 駐車支援方法および装置 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109559555A (zh) * | 2018-12-21 | 2019-04-02 | 联创汽车电子有限公司 | 车位识别系统及其识别方法 |
| CN109559555B (zh) * | 2018-12-21 | 2021-12-28 | 联创汽车电子有限公司 | 车位识别系统及其识别方法 |
| US11017246B2 (en) | 2019-04-22 | 2021-05-25 | Clarion Co., Ltd. | Image processing device and image processing method |
| CN110634319A (zh) * | 2019-09-20 | 2019-12-31 | 哈工大机器人集团重庆普耀信息产业发展有限公司 | 智慧停车云服务系统 |
| CN110634319B (zh) * | 2019-09-20 | 2021-05-07 | 哈工大机器人集团重庆普耀信息产业发展有限公司 | 智慧停车云服务系统 |
| CN114706070A (zh) * | 2022-02-22 | 2022-07-05 | 惠州市德赛西威智能交通技术研究院有限公司 | 一种基于4d毫米波雷达的自动泊车车位搜索方法和系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6700216B2 (ja) | 2020-05-27 |
| US20200090517A1 (en) | 2020-03-19 |
| US11024174B2 (en) | 2021-06-01 |
| JP2018190220A (ja) | 2018-11-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6700216B2 (ja) | 駐車空間検出装置 | |
| US11620837B2 (en) | Systems and methods for augmenting upright object detection | |
| US10935643B2 (en) | Sensor calibration method and sensor calibration apparatus | |
| US10274598B2 (en) | Navigation based on radar-cued visual imaging | |
| US11318930B2 (en) | Parking assistance device and parking assistance method | |
| US11052907B2 (en) | Parking control device and parking control method | |
| US20160280263A1 (en) | Parking assist apparatus | |
| US20170021863A1 (en) | System and method for verifying road position information for a motor vehicle | |
| JP2013190421A (ja) | 車両において通行物体位置検出を向上する方法 | |
| CN106054174A (zh) | 使用雷达和摄像机用于横越交通应用的融合方法 | |
| JP2018189422A (ja) | 障害物検知装置 | |
| CN112771591B (zh) | 用于评价运输工具的环境中的对象对运输工具的行驶机动动作的影响的方法 | |
| JP2010078387A (ja) | 車線判定装置 | |
| JP3991731B2 (ja) | 車両用駐車方向設定装置 | |
| WO2019203160A1 (ja) | 運転支援システムおよび方法 | |
| JP2020047210A (ja) | 物体検出装置 | |
| JP6306455B2 (ja) | 安全運転支援装置および安全運転支援方法 | |
| JP6579144B2 (ja) | 障害物検知装置 | |
| JP4823282B2 (ja) | 周辺監視センサ | |
| JP4872517B2 (ja) | 障害物認識装置 | |
| JP2023106029A (ja) | 車載カメラ装置、車載カメラシステム、および、画像保存方法 | |
| KR20180007211A (ko) | 차량의 후방 추돌경보시스템 | |
| WO2025234072A1 (ja) | 情報処理装置、情報処理方法、および情報処理プログラム | |
| JP7569300B2 (ja) | 物体認識装置及びプログラム | |
| JP7298492B2 (ja) | 車両用処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18798989 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18798989 Country of ref document: EP Kind code of ref document: A1 |