WO2013145399A1 - 生体内導入装置とこの生体内導入装置を有する内視鏡 - Google Patents
生体内導入装置とこの生体内導入装置を有する内視鏡 Download PDFInfo
- Publication number
- WO2013145399A1 WO2013145399A1 PCT/JP2012/077894 JP2012077894W WO2013145399A1 WO 2013145399 A1 WO2013145399 A1 WO 2013145399A1 JP 2012077894 W JP2012077894 W JP 2012077894W WO 2013145399 A1 WO2013145399 A1 WO 2013145399A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- driving force
- introduction device
- main body
- end portion
- vivo introduction
- Prior art date
Links
Images







Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/0016—Holding or positioning arrangements using motor drive units
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00131—Accessories for endoscopes
- A61B1/00135—Oversleeves mounted on the endoscope prior to insertion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00148—Holding or positioning arrangements using anchoring means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0113—Mechanical advancing means, e.g. catheter dispensers
Definitions
- the present invention relates to an in-vivo introduction device that introduces an insertion portion of an endoscope into a living body, and an endoscope having the in-vivo introduction device.
- Patent Document 1 discloses an endoscope insertion aid disposed at the distal end portion of the insertion portion.
- This endoscope insertion assisting tool has a bag-shaped traveling part and a support part that is disposed inside the traveling part and supports the traveling part.
- the support portion includes a worm gear and a peripheral tooth portion that is disposed at the base end portion of the worm gear and is disposed over the entire circumference in the circumferential direction of the base end portion.
- the peripheral tooth portion meshes with a pinion disposed at the tip portion of the torque wire. At this time, the peripheral tooth portion and the pinion are disposed inside the traveling portion.
- the proximal end portion of the torque wire is connected to a drive source.
- the traveling unit When the drive source is driven, the torque wire is rotated, and the worm gear is rotated through the pinion and the peripheral tooth portion in accordance with the rotation. Thereby, the traveling unit circulates so that, for example, the outer side of the traveling unit proceeds in the anti-insertion direction and the inner side of the traveling unit proceeds in the insertion direction.
- the insertion unit obtains a propulsive force as the traveling unit circulates. As a result, the insertion portion is assisted, for example, by the propulsion force.
- Patent Document 2 discloses a catheter.
- the catheter is provided with a corrugated tube into which an endoscope can be inserted, a helical screw disposed at a distal end portion of the corrugated tube, and disposed away from the helical screw, and disposed at a proximal end portion of the corrugated tube,
- the handle includes a handle that rotates the spiral screw through the corrugated tube, and a fixing portion that is disposed at a proximal end portion of the corrugated tube rather than the handle and fixes the endoscope.
- the corrugated tube is arranged in the entire circumferential direction in the circumferential direction of the catheter.
- the helical screw is disposed in a spiral shape around the outer peripheral surface of the corrugated tube and the longitudinal axis of the corrugated tube.
- the corrugated tube rotates, and the helical screw rotates as the corrugated tube rotates.
- the corrugated tube gains propulsive force when the rotating helical screw engages the inner wall of the lumen. As a result, the corrugated tube is assisted, for example, by the driving force.
- Patent Document 1 since the bag-like traveling portion only circulates, there is a possibility that it does not engage with the inner wall of the lumen, for example. For this reason, propulsive force falls. Further, when the traveling part receives resistance from the inner wall, the traveling part buckles, and as a result, the circulation performance of the traveling part may be lowered. This reduces the driving force.
- the corrugated tube is twisted by the resistance received from the inner wall of the lumen. Thereby, the rotational force of the handle is not transmitted to the corrugated tube, and the corrugated tube may not rotate. Therefore, the spiral screw does not rotate and the propulsive force is reduced. Moreover, in patent document 2, when a corrugated tube is inserted / extracted, there exists a possibility that a corrugated tube may not rotate with the resistance received from an inner wall. Therefore, the spiral screw does not rotate and the propulsive force is reduced.
- an object of the present invention is to provide an in-vivo introduction device that can prevent a reduction in propulsive force even when resistance is received, and an endoscope having this in-vivo introduction device.
- One aspect of the in vivo introduction device of the present invention is an in vivo introduction device having a distal end portion and a proximal end portion, which is introduced into a living body in a state where an insertion portion of an endoscope having a longitudinal axis is inserted, A driving force that has an insertion hole through which the insertion portion is inserted, is disposed on the base end side, generates a driving force by rotating around the longitudinal axis, and inputs the driving force A generating input mechanism, disposed closer to the distal end than the driving force generating input mechanism, and disposed more outward in the radial direction of the insertion portion than the insertion portion through which the insertion hole is inserted.
- a driving force transmission mechanism for transmitting a driving force input by the input mechanism; and a flexible driving force transmission mechanism that is inserted through the insertion portion and is driven around the longitudinal axis by the driving force transmitted by the driving force transmission mechanism.
- a rotating cylindrical main body and an outer peripheral surface of the main body A fin portion disposed in a spiral shape around the longitudinal axis, and a spiral rotation member disposed on the distal end portion side, and an insertion through which a base end portion of the main body portion is inserted Having a hole, disposed in the base end side of the in vivo introduction device with respect to the fin portion in the longitudinal axis direction, and the base end portion of the main body portion being inserted through the insertion hole,
- the base end side of the main body portion is connected to the distal end portion of the driving force transmission mechanism so that the main body portion rotates around the longitudinal axis by the driving force.
- one embodiment of the present invention provides an endoscope having the in-vivo introduction device described above.
- FIG. 1 is a schematic view of an endoscope equipped with an in-vivo introduction device according to a first embodiment of the present invention.
- FIG. 2 is a perspective view of the in-vivo introduction device shown in FIG. 3A is a cross-sectional view of the in-vivo introduction device shown in FIG. 3B is a schematic cross-sectional view taken along line 3B-3B shown in FIG. 3A.
- 3C is a schematic cross-sectional view taken along line 3C-3C shown in FIG. 3A.
- FIG. 3D is a cross-sectional view showing a state where the in-vivo introduction device shown in FIG. 3A is positioned at the insertion portion of the endoscope.
- FIG. 4A is a perspective view of the in vivo introduction device according to the second embodiment.
- 4B is a cross-sectional view of the in-vivo introduction device shown in FIG. 4A.
- 4C is a schematic cross-sectional view taken along line 4C-4C shown in FIG. 4B.
- the longitudinal axis indicates, for example, the longitudinal axis of the insertion portion 101 of the endoscope 100.
- the longitudinal axis direction indicates, for example, the longitudinal axis direction of the insertion portion 101.
- the radial direction indicates the radial direction of the insertion portion 101.
- the endoscope 100 has an insertion portion 101 having a longitudinal axis.
- the insertion portion 101 has a distal end portion 101a, a proximal end portion 101b, and an intermediate portion 101c disposed between the distal end portion 101a and the proximal end portion 101b.
- the endoscope 100 has an in-vivo introduction device 10 described later.
- the endoscope 100 may be integrated with the in-vivo introduction device 10 or may be a separate body.
- the in-vivo introduction device 10 shown in FIGS. 1 and 2 is introduced into a living body when, for example, the endoscope 100 observes an observation object disposed in the living body. At this time, the in-vivo introduction device 10 is introduced into the living body in a state where the insertion unit 101 of the endoscope 100 is inserted through the in-vivo introduction device 10.
- the term “in vivo” refers to, for example, a lumen indicating the inside of the small intestine, the inside of the large intestine, the pylorus, the duodenum, and the cardia.
- the observation object is, for example, an affected part or a lesion part in a lumen.
- the in-vivo introduction device 10 is also an auxiliary device that assists the insertion / extraction of the insertion unit 101 when, for example, the insertion unit 101 of the endoscope 100 is inserted into / removed (retracted).
- the in-vivo introduction device 10 has a distal end portion 10a and a proximal end portion 10b. As shown in FIGS. 1 and 2, the in-vivo introduction device 10 is positioned on the proximal end side from the proximal end portion 10 b side of the in-vivo introduction device 10 toward the distal end portion 10 a side of the in-vivo introduction device 10.
- a mechanism 20, a driving force generation input mechanism 30, a driving force transmission mechanism 40, a distal end side positioning mechanism 70, a holding member 60, and a spiral rotating member 50 are included.
- the proximal end side positioning mechanism 20, the driving force generation input mechanism 30, the distal end side positioning mechanism 70, the holding member 60, and the spiral rotating member 50 are configured such that the insertion portion 101 is located inside the proximal end side positioning mechanism 20 in the longitudinal axis direction.
- they are arranged coaxially so as to be arranged inside the driving force generation input mechanism 30, inside the tip end side positioning mechanism 70, inside the holding member 60, and inside the spiral rotating member 50.
- the proximal end side positioning mechanism 20 is disposed on the most proximal end 10 b side of the in-vivo introduction device 10.
- the proximal end side positioning mechanism 20 positions the proximal end portion 10 b side of the in-vivo introduction device 10 to the proximal end portion 101 b of the insertion portion 101.
- the proximal-end-side positioning mechanism 20 attaches the proximal end portion 10b side of the in-vivo introduction device 10 to the proximal end portion 101b of the insertion portion 101, and places the proximal end portion 10b side of the in-vivo introduction device 10 in, for example.
- the proximal end side positioning mechanism 20 is a mounting and fixing mechanism that mounts and fixes the in-vivo introduction device 10 to the insertion unit 101. As shown in FIGS. 1 and 2, the proximal end side positioning mechanism 20 is connected to the driving force generation input mechanism 30.
- the proximal end side positioning mechanism 20 has a cylindrical main body 21 having an insertion hole 21c through which the insertion portion 101 is inserted.
- the proximal end side positioning mechanism 20 moves the proximal end portion 31 b of the main body portion 31 in order to position the proximal end portion 10 b side of the in-vivo introduction device 10 to the insertion portion 101. It has the contact part 23 contact
- the contact portion 23 is formed at a base end portion 31b of a main body portion 31 described later of the driving force generation input mechanism 30 through which the insertion portion 101 is inserted, and is inserted into the insertion hole 21c.
- the proximal end side positioning mechanism 20 is disposed in the insertion hole 21 c, and the base portion of the main body 31 is arranged so that the contact portion 23 contacts the outer peripheral surface of the insertion portion 101. It has a reduced diameter portion 25 that reduces the diameter of the end portion 31b.
- the main body portion 21 is a grip portion of the in-vivo introduction device 10 that is gripped by an operator, for example.
- the main body portion 21 is screwed to the outer peripheral surface of the main body portion 31 when the base end portion 31b of the main body portion 31 is inserted into the insertion hole 21c.
- the insertion hole 21c includes the above-mentioned reduced diameter portion 25 having a truncated cone shape that has a diameter reduced from the distal end portion 10a side to the proximal end portion 10b side of the in-vivo introduction device 10, and a longitudinal axis.
- a cylindrical portion having a cylindrical shape that communicates with the reduced diameter portion 25 in the direction and is disposed on the proximal end portion 10b side with respect to the reduced diameter portion 25 is formed.
- the maximum diameter of the reduced diameter portion 25 is larger than the outer diameter of the insertion portion 101 and substantially the same as the outer diameter of the main body portion 31.
- the minimum diameter of the reduced diameter portion 25 is larger than the outer diameter of the insertion portion 101 and is the same as the diameter of the cylindrical portion.
- the contact portion 23 corresponds to, for example, an edge portion of the base end portion 31b and has a ring shape.
- the contact portion 23 covers the outer peripheral surface of the insertion portion 101.
- 3D when the proximal end portion 31b of the main body portion 31 is inserted into the insertion hole 21c and bent so as to be reduced in diameter by the reduced diameter portion 25, the contact portion 23 is the outer peripheral surface of the insertion portion 101. Abut.
- the contact portion 23 may have a close contact member such as a resin O-ring that is in close contact with the outer peripheral surface of the insertion portion 101.
- the reduced diameter portion 25 is configured such that the contact portion 23 contacts the outer peripheral surface of the insertion portion 101 when the base end portion 31 b of the main body portion 31 is inserted into the insertion hole 21 c. Next, the base end portion 31b of the main body portion 31 is bent to reduce the diameter.
- the driving force generation input mechanism 30 generates a driving force by rotating around the longitudinal axis, and inputs this driving force to the driving force transmission mechanism 40.
- the driving force generation input mechanism 30 is disposed closer to the distal end portion 10 a than the main body portion 21.
- the driving force generation input mechanism 30 has an insertion hole 31c through which the insertion portion 101 is inserted.
- the driving force generation input mechanism 30 is installed on the proximal end portion 101 b side of the insertion portion 101.
- the driving force generation input mechanism 30 is inserted into the insertion hole 21c and connected to the main body portion 21, and the cylindrical main body portion 31 through which the insertion portion 101 is inserted has a longitudinal axis.
- a driving force generator (hereinafter referred to as a generator 33) that is disposed on the outer peripheral surface of the main body 31 so as to be rotatable around an axis and generates a driving force by rotating, and a tip of the generator 33 are integrated with each other.
- a driving force input unit (hereinafter referred to as an input unit 35) that is disposed at the tip of the generating unit 33 and that inputs the driving force generated by the generating unit 33 to the driving force transmission mechanism 40.
- the main body 31 has flexibility. Further, as shown in FIG. 3A, the main body 31 is inserted into the distal end 31 a exposed from the main body 21 when the main body 31 is connected to the main body 21 and the insertion hole 21 c and reduced in diameter by the reduced diameter portion 25. A base end portion 31b, and an insertion hole 31c that is disposed on the central axis of the main body portion 31 and through which the insertion portion 101 can be inserted.
- the tip 31a is a separate body from the insertion hole 31c, and has a groove 31e disposed on the outer side in the radial direction of the main body 31 from the insertion hole 31c.
- the groove portion 31e is disposed such that the input portion 35 is disposed in the groove portion 31e, and the input portion 35 is engaged with the gear 41 of the driving force transmission mechanism 40 described later in the groove portion 31e.
- the groove 31e rotates in the groove 31e together with the generator 33 as the generator 33 rotates, and a shaft member 45 of the driving force transmission mechanism 40, which will be described later, rotates through the gear 41 in the groove 31e. It arrange
- the groove portion 31e is recessed from the outer peripheral surface of the main body portion 31 toward the inner peripheral surface, and the outer peripheral surface of the main body portion 31 extends over the entire periphery of the main body portion 31 along the direction around the axis of the main body portion 31. It is arranged.
- the distal end portion 31a is disposed along the longitudinal axis direction, and has a through hole 31f that penetrates the edge portion of the distal end portion 31a so as to communicate with the groove portion 31e and the outside in the longitudinal axis direction.
- the through hole 31f is a separate body from the insertion hole 31c, and is disposed outside the insertion hole 31c in the radial direction of the main body 31.
- the base end portion 45b of the shaft member 45 is inserted into the through hole 31f so that the gear 41 is disposed in the groove portion 31e.
- the base end portion 31b has the above-described contact portion 23 that functions as an edge portion of the base end portion 31b. Since the main body portion 31 has flexibility, the proximal end portion 31b can be tapered by the reduced diameter portion 25 when inserted into the insertion hole 21c. At this time, the contact portion 23 can contact the outer peripheral surface of the insertion portion 101. When the base end portion 31 b is inserted into the insertion hole 21 c, the main body portion 31 is screwed to the main body portion 21.
- the insertion hole 31c is disposed coaxially with the insertion hole 21c and communicates with the insertion hole 21c.
- the generator 33 can rotate around the longitudinal axis with respect to the main body 31.
- the generating unit 33 has, for example, a ring shape.
- the generating portion 33 is disposed on the outer side in the radial direction than the insertion hole 31 c and the main body portion 31.
- the generator 33 is exposed from the main body 21 in the axial direction when the main body 31 is connected to the main body 21.
- the generating unit 33 is disposed closer to the distal end portion 10a side of the in vivo introduction device 10 than the main body unit 21, and the generating unit 33 is an operation unit operated by an operator's finger holding the main body unit 21. For this reason, it is suitable for the generating part 33 to protrude in the radial direction from the main body part 21, for example.
- the input unit 35 is bent, for example, from the outer peripheral surface side of the generating unit 33 toward the inner peripheral surface side of the generating unit 33 so as to be disposed in the groove 31e.
- the input part 35 is disposed outside the insertion hole 31c in the radial direction of the main body part 31.
- the input unit 35 is disposed on the distal end surface of the distal end portion of the generation unit 33 in the longitudinal axis direction, and is recessed from the distal end portion of the generation unit 33 toward the proximal end portion of the generation unit 33.
- the input unit 35 rotates together with the generation unit 33 as the generation unit 33 rotates. Thereby, the input part 35 rotates the shaft member 45 via the gear 41 meshing with the inner peripheral tooth part 35f. Thus, the input unit 35 inputs the driving force generated by the rotation of the generation unit 33 to the shaft member 45.
- the driving force transmission mechanism 40 as shown in FIGS. 1 and 2 transmits the driving force input by the driving force generation input mechanism 30 to the spiral rotation member 50.
- the driving force transmission mechanism 40 is disposed closer to the distal end portion 10 a side of the in vivo introduction device 10 than the driving force generation input mechanism 30.
- the driving force transmission mechanism 40 is disposed on the outer side in the radial direction of the insertion portion 101 with respect to the insertion portion 101 that is inserted through the insertion hole 31c.
- the driving force transmission mechanism 40 is disposed along the longitudinal axis direction.
- the driving force transmission mechanism 40 is not disposed in the whole circumferential direction in the circumferential direction of the in-vivo introduction device 10 but only in a part in the circumferential direction, and covers the insertion portion 101. Absent. For this reason, as shown in FIG. 2, the driving force transmission mechanism 40 has, for example, a column shape.
- the driving force transmission mechanism 40 includes a gear 41 that meshes with an inner peripheral tooth portion 35f of the input portion 35, a gear 43 that meshes with an outer peripheral tooth portion 51d described later, and a gear 41. And a long shaft member 45 disposed along the longitudinal axis direction.
- the gear 41 is disposed at the base end portion 45b of the shaft member 45, the gear 43 is disposed at the distal end portion 45a of the shaft member 45, and the shaft member 45 is disposed along the longitudinal axis direction.
- the gear 41 is disposed in a groove 31e that is disposed on the outer side in the radial direction of the main body 31 with respect to the insertion hole 31c.
- the gear 41 is disposed in the groove 35e and meshes with the inner peripheral tooth portion 35f.
- the driving force transmission mechanism 40 is disposed so as to be shifted outward in the radial direction from the insertion hole 31c. That is, the driving force transmission mechanism 40 is disposed outside the insertion portion 101.
- such a driving force transmission mechanism 40 includes a main body portion 21 and a driving force generation input mechanism 30, the proximal end portion 10 b side of the in vivo introduction device 10, and a holding member 60. It is also a connecting member that connects the distal end portion 10a side of the in vivo introduction device 10 including the spiral rotating member 50.
- the distal end portion 10a side of the in vivo introduction device 10 including the member 50 is disposed so as to be separated in the longitudinal axis direction.
- the shaft member 45 is long, and the driving force transmission mechanism 40 is disposed outside the insertion portion 101 in the radial direction of the insertion portion 101.
- the space 11 is formed between the holding member 60 and the driving force generation input mechanism 30.
- the insertion part 101 is exposed in the space part 11, as shown to FIG. 1 and FIG. 3D.
- the driving force transmission mechanism 40 is inserted more than the insertion portion 101 so that the space portion 11 is formed between the holding member 60 and the driving force generation input mechanism 30 in the longitudinal axis direction, and the insertion portion 101 is exposed in the space portion 11.
- the portion 101 is disposed outside in the radial direction.
- the gear 41 does not mesh with the entire inner peripheral tooth portion 35f at the same time, but meshes with a part of the inner peripheral tooth portion 35f.
- the diameter of the gear 41 is smaller than the diameter of the inner peripheral tooth portion 35f.
- the gear 43 is disposed on the outer peripheral surface side of the spiral rotating member 50.
- the gear 43 does not mesh with the entire outer peripheral tooth portion 51d so as to cover the entire outer peripheral tooth portion 51d.
- the gear 43 rotates in a state of meshing with a part of the outer peripheral tooth portion 51d, thereby rotating the helical rotation member 50 via the outer peripheral tooth portion 51d.
- the diameter of the gear 43 is smaller than the diameter of the outer peripheral tooth portion 51d.
- the shaft member 45 has flexibility.
- the shaft member 45 is, for example, a torque wire.
- FIGS. 2 and 3A when the input unit 35 is rotated by the rotation of the generating unit 33, the gear 41 that meshes with the inner peripheral tooth portion 35f of the input unit 35 rotates with this rotation.
- the shaft member 45 having the gear 41 rotates around the shaft of the shaft member 45.
- tip part 45a of the shaft member 45 rotates.
- the spiral rotating member 50 rotates.
- the shaft member 45 receives a driving force from the input portion 35 via the gear 41 disposed at the base end portion 45b, and rotates around the axis of the shaft member 45 by the input driving force, whereby the distal end portion A driving force is transmitted to the spiral rotating member 50 through a gear 43 provided in 45a.
- the main body 31 can rotate around the axis of the longitudinal axis, but the shaft member 45 only rotates around the axis of the shaft member 45. Therefore, as shown in FIG. 3A, for example, the tip 45 a of the shaft member 45 is supported by the holding member 60 so that the shaft member 45 can rotate around the shaft of the shaft member 45.
- the base end portion 45 b is supported by the main body portion 31. As described above, the holding member 60 and the main body 31 prevent the shaft member 45 from rotating around the longitudinal axis together with the main body 31.
- the shaft member 45 covers the shaft member 45 and passes through a tubular member 47 having flexibility.
- the tubular member 47 is, for example, a resin tube.
- the tubular member 47 has a hardness that suppresses twisting of the shaft member 45 when the shaft member 45 transmits a driving force to the spiral rotation member 50.
- the tubular member 47 protects the shaft member 45 from resistance from the inner wall.
- the distal end portion of the tubular member 47 is bonded to the proximal end surface of the holding member 60, and the proximal end portion of the tubular member 47 is bonded to the distal end surface of the main body portion 31.
- the tubular member 47 is disposed outside the insertion portion 101 in the radial direction of the insertion portion 101, and is disposed in a part of the circumferential direction of the in-vivo introduction device 10. Yes.
- the spiral rotation member 50 As shown in FIGS. 1 and 3A, the spiral rotation member 50 is disposed on the most distal end portion 10 a side of the in-vivo introduction device 10. The spiral rotation member 50 is disposed away from the driving force generation input mechanism 30 in the longitudinal axis direction.
- the spiral rotation member 50 is rotated about the longitudinal axis by the driving force transmitted from the gear 43 of the driving force transmission mechanism 40 through the insertion portion 101. It has a cylindrical main body 51 and a fin 53 that is disposed on the outer peripheral surface of the main body 51 and spirally disposed around the longitudinal axis.
- the main body 51 is made of, for example, a resin that can be cleaned and sterilized.
- the main body 51 has flexibility.
- This resin is, for example, polyurethane.
- the main body 51 includes a proximal end portion 51b through which an insertion hole 60c (described later) of the holding member 60 is inserted, an insertion hole 51c through which the insertion portion 101 is inserted, and a proximal end in the longitudinal axis direction.
- the base end portion 51b is inserted into the insertion hole 60c, disposed between the portion 51b and the base end portion of the fin portion 53, disposed on the outer peripheral surface of the main body portion 51 over the entire circumference of the main body portion 51.
- an outer peripheral tooth portion 51 d that meshes with the gear 43.
- the insertion hole 51c is arranged coaxially with the insertion hole 31c when the main body 51 is held by the holding member 60.
- the diameter of the insertion hole 51c is substantially the same as the diameter of the insertion hole 31c.
- the outer peripheral tooth portion 51d is disposed closer to the proximal end portion 51b than the fin portion 53 in the longitudinal axis direction.
- the outer peripheral tooth portion 51d is a driving force receiving portion where the helical rotating member 50 receives a driving force.
- the spiral rotation member 50 receives the driving force on the proximal end side of the spiral rotation member 50.
- the portion where the outer peripheral tooth portion 51d is disposed is held by the holding member 60 so that the outer peripheral tooth portion 51d meshes with the gear 43 and is disposed inside the insertion hole 60c. .
- the outer peripheral tooth portion 51d does not insert the holding member 60 into the proximal end portion 10b side.
- the driving force is transmitted from the gear 43 through the outer peripheral tooth portion 51d to the main body 51 when the gear 43 rotates while the outer peripheral tooth portion 51d is engaged with the gear 43.
- the main-body part 51 rotates around the axis of a longitudinal axis with a driving force.
- the fin portion 53 is exposed from the holding member 60 and is disposed closer to the distal end portion 10 a side of the in vivo introduction device 10 than the holding member 60. That is, the fin portion 53 is not inserted into the insertion hole 60c.
- the fin portion 53 is formed of, for example, rubber that can be cleaned and sterilized.
- the fin part 53 is being fixed to the outer peripheral surface of the main-body part 51 by adhesion
- the fin portion 53 is disposed, for example, in a clockwise spiral shape in the direction of viewing the distal end portion from the base end portion 51 b of the main body portion 51.
- the fin portion 53 When the insertion portion 101 is inserted into the lumen, the fin portion 53 contacts the inner wall of the lumen. In this state, when the main body 51 rotates about the longitudinal axis, the fin portion 53 engages with the inner wall of the lumen, and the propulsive force acts on the insertion portion 101 in the longitudinal axis direction. Thereby, the insertion part 101 advances / retreats (inserts / removes) in the lumen. The propulsive force acts on the insertion portion 101 in the insertion direction of the insertion portion 101 and acts on the insertion portion 101 in the insertion direction for assisting the insertion of the insertion portion 101 or in the removal direction of the insertion portion 101, thereby removing the insertion portion 101. Indicates the removal force to assist.
- the insertion force acts on the insertion portion 101, and the insertion property of the insertion portion 101 is improved.
- the removal force acts on the insertion portion 101, and the removal performance of the insertion portion 101 is improved.
- the holding member 60 has a cylindrical shape.
- the holding member 60 has an insertion hole 60 c through which the proximal end portion 51 b of the main body 51 is inserted.
- the holding member 60 is disposed closer to the proximal end portion 10 b of the in vivo introduction device 10 than the fin portion 53.
- the holding member 60 is in a state where the base end portion 51b of the main body portion 51 is inserted through the insertion hole 60c, and the main body portion 51 is at the distal end portion of the driving force transmission mechanism 40 via the outer peripheral tooth portion 51d.
- the main body 51 is held so that the main body 51 rotates around the longitudinal axis by a driving force in connection with a certain gear 43.
- the holding member 60 holds the helical rotation member 50 so that the helical rotation member 50 rotates around the longitudinal axis by the driving force transmitted by the driving force transmission mechanism 40.
- the holding member 60 includes a main body of the spiral rotating member 50 such that the holding member 60 holds the spiral rotating member 50 and the spiral rotating member 50 can be rotated around the longitudinal axis by a driving force.
- the part 51 is inserted, and the base end part 51b of the main body part 51 has the aforementioned insertion hole 60c through which the base end part 10b of the in-vivo insertion device is inserted.
- the insertion hole 60 c is arranged coaxially with the insertion hole 31 c when the holding member 60 is connected to the main body 31 via the driving force transmission mechanism 40.
- the diameter of the insertion hole 60c has substantially the same size as the diameter of the insertion hole 31c.
- the holding member 60 is a separate body from the insertion hole 60 c, is disposed outside the insertion hole 60 c in the radial direction of the holding member 60, and is inserted in the radial direction of the holding member 60.
- the gear 43 of the driving force transmission mechanism 40 meshes with the outer peripheral tooth portion 51d of the spiral rotating member 50, and the shaft member 45 rotates to rotate the gear 43 together with the shaft member 45 in the groove 60e.
- the groove 60 e is recessed from the inner peripheral surface of the holding member 60 toward the outer peripheral surface.
- the through hole 60f is a separate body from the insertion hole 60c, and is disposed outside the insertion hole 60c in the radial direction of the holding member 60.
- the distal end portion of the shaft member 45 is inserted into the through hole 60f so that the gear 43 is disposed in the groove portion 60e.
- the through hole 60f is disposed coaxially with the through hole 31f so that the driving force transmission mechanism 40 is disposed linearly.
- the distal end side positioning mechanism 70 positions the in-vivo introduction device 10, specifically, the proximal end portion of the spiral rotation member 50, to the intermediate portion 101 c of the insertion portion 101.
- the distal end side positioning mechanism 70 attaches the in-vivo introduction device 10 to the intermediate portion 101 c of the insertion portion 101 and positions the in-vivo introduction device 10 to the intermediate portion 101 c of the insertion portion 101.
- the distal end side positioning mechanism 70 is a mounting and fixing mechanism that mounts and fixes the in-vivo introduction device 10 to the insertion unit 101.
- the distal end portion side positioning mechanism 70 is disposed closer to the proximal end portion 10b side of the in vivo introduction device 10 than the fin portion 53 is. As shown in FIG. 3A, for example, the distal end portion side positioning mechanism 70 is disposed in the vicinity of the proximal end portion of the fin portion 53. Specifically, as shown in FIGS. 1, 2, and 3 ⁇ / b> A, the distal end side positioning mechanism 70 is disposed on the proximal end portion 10 b side of the in-vivo introduction device 10 with respect to the holding member 60. As shown in FIG.
- the distal end side positioning mechanism 70 is formed on the proximal end portion 51 b of the main body portion 51 through which the rotation holding portion is inserted. As shown in FIG. 3A, the distal end portion side positioning mechanism 70 is disposed in the vicinity of the outer peripheral tooth portion 51d that is a driving force receiving portion and closer to the proximal end portion 10b side of the in vivo introduction device 10 than the outer peripheral tooth portion 51d. Has been.
- the distal end side positioning mechanism 70 has a cylindrical main body 71 having an insertion hole 71c through which the insertion portion 101 is inserted.
- the distal end side positioning mechanism 70 is formed at the proximal end portion 51b of the main body portion 51 that is inserted into the insertion hole 71c after being inserted through the insertion hole 60c.
- a contact portion 73 that contacts the outer peripheral surface of the insertion portion 101 that passes through the proximal end portion 51b of the main body portion 51 is provided.
- the distal end side positioning mechanism 70 is disposed in the insertion hole 71c, and the proximal end of the main body 51 so that the contact portion 73 contacts the outer peripheral surface of the insertion portion 101. It has a reduced diameter portion 75 that reduces the diameter of the portion 51b.
- the main body 71 is disposed closer to the insertion portion 101 than the tubular member 47 and the driving force transmission mechanism 40 in the radial direction, for example. As shown in FIG. 3A, the main body 71 is screwed to the outer peripheral surface of the base end 51b when the base end 51b of the main body 51 is inserted into the insertion hole 51c.
- the insertion hole 71c has a truncated cone-shaped reduced diameter portion 75 that is reduced in diameter from the distal end portion 10a toward the proximal end portion 10b of the in-vivo introduction device 10, and the longitudinal axis direction.
- the cylindrical portion communicates with the reduced diameter portion 75 and is formed by a cylindrical portion having a cylindrical shape and disposed closer to the proximal end portion 10 b than the reduced diameter portion 75.
- the maximum diameter of the reduced diameter portion 75 is larger than the outer diameter of the insertion portion 101 and substantially the same as the outer diameter of the main body portion 51, and the minimum diameter of the reduced diameter portion 75 is It is larger than the outer diameter of the insertion part 101 and is the same as the diameter of the cylindrical part.
- the inserted base end portion 51 b of the main body portion 51 is inserted through the main body portion 51.
- the insertion portion 101 is positioned with respect to the spiral rotation member 50 by contacting the outer peripheral surface of the spiral rotation member 50.
- the reduced diameter portion 75 reduces the diameter of the proximal end portion 51 b of the main body portion 51 so that the proximal end portion 51 b of the main body portion 51 contacts the outer peripheral surface of the insertion portion 101.
- the reduced diameter portion 75 is configured so that the base portion 51 b of the main body 51 is in contact with the outer peripheral surface of the insertion portion 101 when the base end portion 51 b of the main body 51 is inserted into the insertion hole 71 c.
- the end 51b is bent to reduce the diameter.
- the contact portion 73 corresponds to, for example, an edge portion of the base end portion 51b and has a ring shape.
- the contact portion 73 covers the outer peripheral surface of the insertion portion 101.
- 3D when the base end portion 51b of the main body 51 is inserted into the insertion hole 71c and bent so as to be reduced in diameter by the reduced diameter portion 75, the contact portion 73 is the outer peripheral surface of the insertion portion 101. Abut.
- the base end portion 51b has the aforementioned contact portion 73 that functions as an edge portion of the base end portion 51b. Since the main body 51 has flexibility, the proximal end 51b can be tapered by the reduced diameter portion 75 when inserted into the insertion hole 71c. At this time, the contact portion 73 can contact the outer peripheral surface of the insertion portion 101. When the base end portion 51 b is inserted into the insertion hole 71 c, the main body portion 71 is screwed to the main body portion 51.
- the abutting portion 73 may have a close contact member such as a resin O-ring that is in close contact with the outer peripheral surface of the insertion portion 101.
- the distal end portion of the spiral rotating member 50 is a free end
- the proximal end portion of the spiral rotating member 50 is a fixed end.
- the fixed end is positioned at the intermediate portion 101 c of the insertion portion 101 and is close to the driving force receiving portion of the spiral rotating member 50.
- the driving force generation input mechanism 30 is connected to the driving force transmission mechanism 40 so that the gear 41 meshes with the inner peripheral tooth portion 35f. At this time, the main body 31 is not attached to the main body 21.
- the driving force transmission mechanism 40 is arranged such that the base end portion 51 b of the main body 51 passes through the insertion hole 60 c of the holding member 60 and the outer peripheral tooth portion 51 d meshes with the gear 43 when inserted. And is held by the holding member 60. At this time, the main body 51 is not attached to the main body 71.
- the proximal end portion 10b side of the in vivo introduction device 10 including the driving force generation input mechanism 30 side and the distal end portion 10a side of the in vivo introduction device 10 including the holding member 60 and the helical rotation member 50 are driven.
- the force transmission mechanism 40 is used for connection.
- the insertion hole 31c and the insertion hole 51c are arranged on the same straight line.
- the driving force transmission mechanism 40 is disposed on the outer side in the radial direction than the insertion hole 31c. Further, a space portion 11 is formed between the holding member 60 and the driving force generation input mechanism 30 in the longitudinal axis direction.
- the main body portion 21 is disposed closer to the proximal end portion 10b side of the in vivo introduction device 10 than the main body portion 31 so that the insertion hole 21c and the insertion hole 31c are disposed on the same straight line.
- the insertion hole 51c and the insertion hole 71c are arranged on the same straight line, and are arranged closer to the insertion part 101 than the tubular member 47 and the driving force transmission mechanism 40 in the radial direction. Arranged in the space 11.
- the insertion portion 101 has an insertion hole 51c, the proximal end portion 101b side of the insertion portion 101 is disposed on the main body portion 21 side, and the distal end portion 101a side of the insertion portion 101 is disposed on the spiral rotation member 50 side. 71c, 31c, and 21c are inserted.
- the base end portion 31 b of the main body portion 31 is reduced in diameter by the reduced diameter portion 25, and the abutting portion 23 is in contact with the outer peripheral surface of the base end portion 101 b of the insertion portion 101. It is screwed to the outer peripheral surface of the part 31b.
- the abutment portion 23 abuts on the outer peripheral surface of the proximal end portion 101b of the insertion portion 101, the in-vivo introduction device 10 is positioned at the proximal end portion 101b of the insertion portion 101.
- the base end portion of the main body portion 51 is arranged so that the base end portion 51b is reduced in diameter by the reduced diameter portion 75 and the contact portion 73 is in contact with the outer peripheral surface of the intermediate portion 101c of the insertion portion 101. Screwed to the outer peripheral surface of 51b. At this time, since the abutment portion 73 abuts on the outer peripheral surface of the intermediate portion 101 c of the insertion portion 101, the in-vivo introduction device 10 is positioned on the intermediate portion 101 c of the insertion portion 101.
- the in-vivo introduction device 10 is mounted on the insertion unit 101 while being positioned on the insertion unit 101.
- the generator 33 is operated by a finger and rotates around the longitudinal axis.
- the input unit 35 rotates around the longitudinal axis together with the generation unit 33 as the generation unit 33 rotates.
- the gear 41 meshing with the inner peripheral tooth portion 35 f rotates, and the shaft member 45 rotates around the shaft of the shaft member 45.
- the input unit 35 rotates the shaft member 45 via the gear 41 meshing with the inner peripheral tooth portion 35f.
- the input unit 35 inputs a driving force generated by the rotation of the generating unit 33 to the shaft member 45.
- the shaft member 45 receives a driving force from the input unit 35 via the gear 41 and rotates around the shaft of the shaft member 45 by the input driving force.
- the shaft member 45 rotates to transmit a driving force to the spiral rotation member 50 via the gear 43 to rotate the spiral rotation member 50.
- the fin portion 53 engages with the inner wall of the lumen, and the propulsive force acts on the spiral rotating member 50 in the insertion direction of the insertion portion 101, for example. Thereby, the insertion of the helical rotating member 50 is assisted by the propulsive force.
- the driving force transmission mechanism 40 is disposed outside the insertion portion 101 in the radial direction of the insertion portion 101.
- the driving force transmission mechanism 40 is not disposed in the entire circumferential direction in the circumferential direction of the in-vivo introduction device 10, but is only partially disposed in the circumferential direction. For this reason, when the in-vivo introduction device 10 is inserted into the lumen, the driving force transmission mechanism 40 is unlikely to receive resistance from the inner wall, and as a result, twisting is suppressed.
- the driving force transmission mechanism 40 reliably transmits the driving force to the spiral rotating member 50. And the helical rotation member 50 rotates reliably, and the fin part 53 engages with an inner wall reliably. Therefore, a reduction in propulsive force is prevented. Thus, even if the driving force transmission mechanism 40 receives resistance, a reduction in propulsive force is prevented.
- the tubular member 47 protects the shaft member 45 from resistance. For this reason, the driving force transmission mechanism 40 reliably transmits the driving force to the spiral rotation member 50.
- the shaft member 45 has flexibility, even if it is twisted or subjected to resistance, the driving force is reliably transmitted to the spiral rotating member 50.
- the helical rotation member 50 receives the driving force on the proximal end side of the helical rotation member 50 by the outer peripheral tooth portion 51 d that is the driving force receiving portion.
- the distal end side positioning mechanism 70 is disposed closer to the proximal end portion 10 b than the fin portion 53, and is disposed at the proximal end portion 51 b of the main body portion 51.
- the base end portion 51 b of the main body 51 that indicates the base end portion of the spiral rotation member 50 is positioned at the intermediate portion 101 c of the insertion portion 101 by the distal end side positioning mechanism 70.
- the distal end side positioning mechanism 70 is disposed closer to the proximal end portion 10b of the in vivo introduction device 10 than the fin portion 53 in the longitudinal axis direction.
- the distal end side positioning mechanism 70 is disposed in the vicinity of the outer peripheral tooth portion 51d that is a driving force receiving portion, and closer to the proximal end portion 10b side of the in vivo introduction device 10 than the outer peripheral tooth portion 51d.
- the arrangement position of the driving force receiving portion of the spiral rotation member 50 and the positioning position of the main body portion 51 are close to each other.
- the main-body part 51 has flexibility.
- the fin portion 53 buckles.
- the main body 51 of the spiral rotation member 50 receives resistance via the fins 53.
- This resistance force tries to compress the main body 51 so that the length of the main body 51 is shorter than that in the natural length. For this reason, the space
- the base end portion 51b of the main body 51 is positioned at the intermediate portion 101c of the insertion portion 101, and the main body 51 has flexibility. Therefore, the more the main body 51 receives the resistance, the more the main body 51 extends toward the distal end portion 10a by the reaction force. As a result, the gap between the fin portions 53 is prevented from being narrowed, and the fin portions 53 are reliably engaged with the inner wall. This prevents a reduction in propulsive force.
- the arrangement position of the driving force receiving portion (outer peripheral tooth portion 51d) of the spiral rotating member 50 and the positioning position of the main body portion 51 are close to each other, and therefore when the main body portion 51 receives resistance.
- the reaction force increases and the main body 51 further extends. For this reason, it is prevented that the space
- the main body 51 receives resistance, and the main body 51 slides the insertion portion 101 toward the proximal end portion 10b. For this reason, only the insertion part 101 is inserted, the in-vivo introduction apparatus 10 is not introduced, and propulsive force falls. However, in the present embodiment, such a state is prevented as described above.
- the main body 51 receives resistance via the fins 53.
- This resistance force tries to extend the main body 51 so that the length of the main body 51 is longer than that of the natural length.
- the main body 51 has flexibility, the more the main body 51 receives resistance, the more the main body 51 is compressed toward the distal end portion 10a by the reaction force. Thereby, the space
- such a state is prevented as described above.
- the driving force transmission mechanism 40 is disposed outside the insertion portion 101 in the radial direction of the insertion portion 101.
- the driving force transmission mechanism 40 is not disposed in the entire circumferential direction in the circumferential direction of the in-vivo introduction device 10, but is only partially disposed in the circumferential direction. For this reason, in this embodiment, the driving force transmission mechanism 40 becomes difficult to receive resistance from the inner wall, and as a result, twisting of the driving force transmission mechanism 40 can be suppressed. Therefore, in the present embodiment, the driving force can be reliably transmitted to the spiral rotation member 50, the spiral rotation member 50 can be reliably rotated, the fin portion 53 can be reliably engaged with the inner wall, and the propulsion force can be prevented from being lowered.
- the tubular member 47 covers the shaft member 45 and protects the shaft member 45 from resistance. Thereby, in this embodiment, it can prevent that the shaft member 45 is twisted by resistance, and can transmit a driving force to the helical rotation member 50 reliably.
- the distal end portion side positioning mechanism 70 is disposed on the proximal end portion 10 b side with respect to the fin portion 53, and is disposed on the proximal end portion 51 b of the main body portion 51. Further, the arrangement position of the driving force receiving portion (outer peripheral tooth portion 51 d) of the spiral rotating member 50 and the positioning position of the main body portion 51 are close to each other. And the main-body part 51 has flexibility. Thereby, in this embodiment, it can prevent that the space
- the contact portion 73 can be easily contacted with the outer peripheral surface of the insertion portion 101 by the reduced diameter portion 75, and the insertion portion 101 can be easily positioned.
- the abutting portion 73 abuts on the outer peripheral surface of the inserting portion 101 after the inserting portion 101 has passed through the in-vivo introduction device 10. For this reason, when the insertion part 101 inserts the in-vivo introduction apparatus 10, it can prevent that the outer peripheral surface of the insertion part 101 is worn by sliding etc., and can position it easily.
- the inner peripheral surface of the main body 51 does not make surface contact with the outer peripheral surface of the insertion portion 101, but only the ring-shaped contact portion 73 corresponding to the edge of the base end portion 51b is inserted. It abuts on the outer peripheral surface of 101. Thus, in this embodiment, it can position simply.
- the positioning can be surely performed by the two positioning mechanisms.
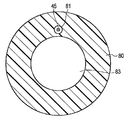
- the shaft member 45 is covered with the tubular member 47, it is not necessary to limit to this. As shown in FIGS. 4A, 4B, and 4C, the shaft member 45 may be inserted through a channel 81 that is disposed in the thick portion of the overtube 80. In this case, the overtube 80 is disposed between the driving force generation input mechanism 30 and the holding member 60 in the longitudinal axis direction. The channel 81 is disposed along the longitudinal axis direction.
- the overtube 80 communicates with the insertion hole 31c and the insertion hole 60c, and has an insertion hole 83 in which the insertion part 101 is inserted and the main body part 71 is disposed.
- the overtube 80 has an opening 85 that is disposed on the peripheral surface of the overtube 80 and opens outward so that the main body 71 is operated.
- the main body 71 is operated through the opening 85 so that the base end 51 b is reduced in diameter by the reduced diameter portion 75 and the contact portion 73 is in contact with the outer peripheral surface of the insertion portion 101.
- the drive force generation input mechanism 30 may have a drive source (not shown) such as a motor that generates drive force.
- the drive source may be connected to the input unit 35 or may be directly connected to the shaft member 45.
- the present invention is not limited to the above-described embodiment as it is, and can be embodied by modifying the constituent elements without departing from the scope of the invention in the implementation stage. Further, various inventions can be formed by appropriately combining a plurality of constituent elements disclosed in the embodiment.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- Heart & Thoracic Surgery (AREA)
- Biophysics (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Radiology & Medical Imaging (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Pathology (AREA)
- Physics & Mathematics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pulmonology (AREA)
- Anesthesiology (AREA)
- Hematology (AREA)
- Endoscopes (AREA)
Abstract
Description
また走行部は内壁から抵抗を受けると、走行部は座屈し、結果として走行部の循環性能が低下する虞が生じる。これにより推進力が低下する。
また特許文献2において、波形管が挿抜される際、波形管は、内壁から受ける抵抗によって、回転しない虞が生じる。よって、螺旋ねじが回転せず、推進力が低下する。
[第1の実施形態]
[構成]
図1と図2と図3Aと図3Bと図3Cと図3Dとを参照して、第1の実施形態について説明する。なお図3Cにおいて保持部材60の図示を省略するように、一部の図面では、図示の明瞭化のために、部材の一部の図示を省略している。また以下において、長手軸とは、例えば、内視鏡100の挿入部101の長手軸を示す。長手軸方向とは、例えば、挿入部101の長手軸方向を示す。径方向は、挿入部101の径方向を示す。
図1に示すように、内視鏡100は、長手軸を有する挿入部101を有している。この挿入部101は、先端部101aと、基端部101bと、先端部101aと基端部101bとの間に配設される中間部101cとを有している。内視鏡100は、後述する生体内導入装置10を有する。なお内視鏡100は、生体内導入装置10とは一体であっても別体であってもよい。
図1と図2とに示す生体内導入装置10は、例えば内視鏡100が生体内に配設される観察対象物を観察する際、生体内に導入される。このとき、生体内導入装置10は、内視鏡100の挿入部101が生体内導入装置10を挿通した状態で、生体内に導入される。生体内とは、例えば、小腸の内部と、大腸の内部と、、幽門と、十二指腸と、噴門等を示す管腔を示す。観察対象物とは、例えば、管腔内における患部や病変部等である。
また生体内導入装置10は、例えば内視鏡100の挿入部101が生体内に挿抜(進退)される際、挿入部101の挿抜を補助する補助装置でもある。
図1と図2とに示すように、生体内導入装置10は、先端部10aと基端部10bとを有する。そして図1と図2とに示すように、生体内導入装置10は、生体内導入装置10の基端部10b側から生体内導入装置10の先端部10a側に向かって、基端部側位置決め機構20と、駆動力発生入力機構30と、駆動力伝達機構40と、先端部側位置決め機構70と、保持部材60と、螺旋回転部材50とを有している。
図1に示すように、基端部側位置決め機構20は、生体内導入装置10の最も基端部10b側に配設されている。この基端部側位置決め機構20は、生体内導入装置10の基端部10b側を、挿入部101の基端部101bに位置決めする。言い換えると、基端部側位置決め機構20は、例えば、生体内導入装置10の基端部10b側を挿入部101の基端部101bに装着し、生体内導入装置10の基端部10b側を挿入部101の基端部101bに位置決めする。このように基端部側位置決め機構20は、生体内導入装置10を挿入部101に装着及び固定する装着固定機構である。図1と図2とに示すように、基端部側位置決め機構20は、駆動力発生入力機構30と連結する。
図2と図3Aとに示すように、駆動力発生入力機構30は、長手軸の軸周りに回転することによって駆動力を発生させ、この駆動力を駆動力伝達機構40に入力する。図3Aに示すように、駆動力発生入力機構30は、本体部21よりも先端部10a側に配設されている。図3Aに示すように、駆動力発生入力機構30は、挿入部101が挿通する挿通孔31cを有している。図1に示すように、駆動力発生入力機構30は、挿入部101の基端部101b側に設置される。
図1と図2とに示すような駆動力伝達機構40は、駆動力発生入力機構30によって入力された駆動力を、螺旋回転部材50に伝達する。駆動力伝達機構40は、駆動力発生入力機構30よりも生体内導入装置10の先端部10a側に配設されている。また図1と図3Dとに示すように、駆動力伝達機構40は、挿通孔31cを挿通する挿入部101よりも挿入部101の径方向において外側に配設されている。図1と図2とに示すように、駆動力伝達機構40は、長手軸方向に沿って配設されている。そして駆動力伝達機構40は、生体内導入装置10の周方向において、周方向全体に配設されるのではなく、周方向の一部に配設されているのみであり、挿入部101を覆わない。このため図2に示すように、駆動力伝達機構40は、例えば柱形状を有している。
図1と図3Aとに示すように、螺旋回転部材50は、生体内導入装置10の最も先端部10a側に配設されている。螺旋回転部材50は、駆動力発生入力機構30に対して、長手軸方向において離間して配設されている。
図3Aに示すように、保持部材60は、筒形状を有している。保持部材60は、本体部51の基端部51bが挿通する挿通孔60cを有している。図1と図2と図3Aとに示すように、保持部材60は、フィン部53よりも生体内導入装置10の基端部10b側に配設されている。図3Aに示すように、保持部材60は、本体部51の基端部51bが挿通孔60cを挿通した状態で、本体部51が外周歯部51dを介して駆動力伝達機構40の先端部であるギア43と連結して、本体部51が駆動力によって長手軸の軸周りに回転するように、本体部51を保持する。言い換えると、保持部材60は、螺旋回転部材50が駆動力伝達機構40によって伝達された駆動力によって長手軸の軸周りに回転するように、螺旋回転部材50を保持する。
図1に示すように、先端部側位置決め機構70は、生体内導入装置10、詳細には螺旋回転部材50の基端部を、挿入部101の中間部101cに位置決めする。言い換えると、先端部側位置決め機構70は、例えば、生体内導入装置10を挿入部101の中間部101cに装着し、生体内導入装置10を挿入部101の中間部101cに位置決めする。このように先端部側位置決め機構70は、生体内導入装置10を挿入部101に装着及び固定する装着固定機構である。
駆動力発生入力機構30は、ギア41が内周歯部35fと噛み合うように、駆動力伝達機構40と連結する。このとき、本体部31は、本体部21に未装着である。
前記したように、挿入部101に装着された生体内導入装置10において、本体部21は把持され、挿入部101の先端部101aと螺旋回転部材50とは生体内に導入される。このときフィン部53は、管腔の内壁に係合する。
本実施形態では、駆動力伝達機構40は、挿入部101よりも挿入部101の径方向において外側に配設されている。駆動力伝達機構40は、生体内導入装置10の周方向において、周方向全体に配設されるのではなく、周方向において一部に配設されているのみである。このため、生体内導入装置10が管腔に挿入された際、駆動力伝達機構40は、内壁からの抵抗を受けにくく、結果的に捩れを抑制される。
本実施形態では、螺旋回転部材50は、駆動力受け部である外周歯部51dによって、駆動力を、螺旋回転部材50の基端部側にて受ける。
このとき、先端部側位置決め機構70は、長手軸方向において、フィン部53よりも生体内導入装置10の基端部10b側に配設されている。詳細には、先端部側位置決め機構70は、駆動力受け部である外周歯部51dの近傍、且つ、外周歯部51dよりも生体内導入装置10の基端部10b側に配設されている。
このように本実施形態では、螺旋回転部材50の駆動力受け部の配設位置と、本体部51の位置決め位置とが互いに近接している。そして、本体部51は、可撓性を有している。
本実施形態では、駆動力伝達機構40は、挿入部101よりも挿入部101の径方向において外側に配設されている。駆動力伝達機構40は、生体内導入装置10の周方向において、周方向全体に配設されるのではなく、周方向において一部に配設されているのみである。このため、本実施形態では、駆動力伝達機構40は内壁からの抵抗を受けにくくなり、結果的に駆動力伝達機構40の捩れを抑制できる。よって本実施形態では、駆動力を螺旋回転部材50に確実に伝達でき、螺旋回転部材50を確実に回転でき、フィン部53を確実に内壁に係合でき、推進力の低下を防止できる。
軸部材45は、管状部材47によって覆われているが、これに限定する必要はない。図4Aと図4Bと図4Cとに示すように、軸部材45は、オーバーチューブ80の肉厚部に配設されるチャンネル81を挿通していてもよい。この場合、オーバーチューブ80は、長手軸方向において、駆動力発生入力機構30と保持部材60との間に配設されている。チャンネル81は、長手軸方向に沿って配設されている。
駆動力発生入力機構30は、駆動力を発生する例えばモータなどの図示しない駆動源を有していてもよい。この場合、駆動源は、入力部35と連結していても良いし、軸部材45と直接連結していても良い。
Claims (16)
- 長手軸を有する内視鏡の挿入部が挿通した状態で生体内に導入され、先端部と基端部とを有する生体内導入装置であって、
前記挿入部が挿通する挿通孔を有しており、前記基端部側に配設されており、前記長手軸の軸周りに回転することによって駆動力を発生させ、駆動力を入力する駆動力発生入力機構と、
前記駆動力発生入力機構よりも前記先端部側に配設され、前記挿通孔を挿通する前記挿入部よりも前記挿入部の径方向において外側に配設され、前記駆動力発生入力機構によって入力された駆動力を伝達する駆動力伝達機構と、
可撓性を有し、前記挿入部が挿通し、前記駆動力伝達機構によって伝達された駆動力によって前記長手軸の軸周りに回転する円筒状の本体部と、前記本体部の外周面に配設され、且つ前記長手軸の軸周りに螺旋状に配設されるフィン部とを有し、前記先端部側に配設される螺旋回転部材と、
前記本体部の基端部が挿通する挿通孔を有し、前記長手軸方向において前記フィン部よりも前記生体内導入装置の前記基端部側に配設され、前記本体部の前記基端部が前記挿通孔を挿通した状態で、前記本体部の前記基端部側が前記駆動力伝達機構の先端部と連結して、前記本体部が駆動力によって前記長手軸の軸周りに回転するように、前記本体部の前記基端部側を保持する保持部材と、
前記螺旋回転部材を前記挿入部に位置決めする位置決め機構と、
を具備する生体内導入装置。 - 前記位置決め機構は、前記長手軸方向において、前記フィン部よりも前記生体内導入装置の前記基端部側に配設される請求項1に記載の生体内導入装置。
- 前記位置決め機構は、前記本体部の前記基端部に形成される請求項1または請求項2に記載の生体内導入装置。
- 前記位置決め機構は、前記保持部材よりも前記生体内導入装置の基端部側に配設される請求項1乃至請求項3のいずれか1つに記載の生体内導入装置。
- 前記位置決め機構は、前記本体部の前記基端部を、前記挿入部の先端部と前記挿入部の基端部との間に配設される中間部に位置決めする請求項1乃至請求項4のいずれか1つに記載の生体内導入装置。
- 前記位置決め機構は、前記生体内導入装置の基端部を、前記挿入部の基端部に位置決めする請求項1乃至請求項5のいずれか1つに記載の生体内導入装置。
- 前記位置決め機構は、前記本体部の前記基端部が前記本体部を挿通する前記挿入部の外周面に当接することによって、前記挿入部が前記螺旋回転部材に対して位置決めされるために、前記本体部の前記基端部が前記挿入部の外周面に当接するように前記本体部の前記基端部を縮径する縮径部を有する請求項1乃至請求項6のいずれか1つに記載の生体内導入装置。
- 前記駆動力発生入力機構は、前記挿入部の基端部側に設置される請求項1乃至請求項7のいずれか1つに記載の生体内導入装置。
- 前記駆動力発生入力機構は、
前記挿入部が挿通する円筒状の本体部と、
前記長手軸の軸周りに回転可能となるように前記駆動力発生入力機構の前記本体部の外周面に配設され、回転することによって駆動力を発生する駆動力発生部と、
前記駆動力発生部の先端部と一体となるように配設され、前記駆動力発生部にて発生した前記駆動力を前記駆動力伝達機構に入力する駆動力入力部と、
を有する請求項1乃至請求項8のいずれか1つに記載の生体内導入装置。 - 前記駆動力伝達機構は、
先端部と基端部と可撓性とを有し、前記基端部において前記駆動力入力部によって前記駆動力を入力され、入力された前記駆動力によって軸周りに回転することによって、前記駆動力を前記先端部から前記螺旋回転部材の前記本体部に伝達する長尺な軸部材と、
を有する請求項1乃至請求項9のいずれか1つに記載の生体内導入装置。 - 前記軸部材は、前記軸部材を覆い、可撓性を有する管状部材を挿通している請求項10に記載の生体内導入装置。
- 前記管状部材は、前記軸部材が前記駆動力を前記螺旋回転部材の前記本体部に伝達する際に、前記軸部材の捩れを抑制する硬度を有する請求項11に記載の生体内導入装置。
- 前記長手軸方向において、前記駆動力発生入力機構と前記保持部材との間に配設され、前記軸部材と前記挿入部とを覆うように前記軸部材と前記挿入部とが挿入され、可撓性を有するオーバーチューブをさらに具備する請求項10に記載の生体内導入装置。
- 前記オーバーチューブは、前記軸部材が挿入されるチャンネルを有する請求項13に記載の生体内導入装置。
- 前記駆動力伝達機構は、前記生体内導入装置の周方向において、周方向の一部に配設されている請求項1乃至請求項14のいずれか1つに記載の生体内導入装置。
- 請求項1乃至請求項15のいずれか1つに記載の生体内導入装置を有する内視鏡。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013529231A JP5364867B1 (ja) | 2012-03-29 | 2012-10-29 | 生体内導入装置とこの生体内導入装置を有する内視鏡 |
| CN201280022446.3A CN103517663B (zh) | 2012-03-29 | 2012-10-29 | 活体内导入装置和具有该活体内导入装置的内窥镜 |
| EP12872383.0A EP2837319B1 (en) | 2012-03-29 | 2012-10-29 | Biological introduction apparatus and endoscope having biological introduction apparatus |
| US13/933,240 US9173549B2 (en) | 2012-03-29 | 2013-07-02 | Biological introduction apparatus and endoscope having biological introduction apparatus |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012-076176 | 2012-03-29 | ||
| JP2012076176 | 2012-03-29 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US13/933,240 Continuation US9173549B2 (en) | 2012-03-29 | 2013-07-02 | Biological introduction apparatus and endoscope having biological introduction apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2013145399A1 true WO2013145399A1 (ja) | 2013-10-03 |
Family
ID=49258739
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2012/077894 WO2013145399A1 (ja) | 2012-03-29 | 2012-10-29 | 生体内導入装置とこの生体内導入装置を有する内視鏡 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9173549B2 (ja) |
| EP (1) | EP2837319B1 (ja) |
| JP (1) | JP5364867B1 (ja) |
| CN (1) | CN103517663B (ja) |
| WO (1) | WO2013145399A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2015122474A1 (ja) * | 2014-02-12 | 2017-03-30 | 株式会社工販 | 内視鏡用オーバーチューブデバイス |
| CN115969530A (zh) * | 2022-12-02 | 2023-04-18 | 上海埃度医疗器械科技有限公司 | 一种带荧光4k高清摄像加led光源一体机 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6116779B1 (ja) * | 2015-06-05 | 2017-04-19 | オリンパス株式会社 | 補助具および挿入装置 |
| JP6064102B1 (ja) * | 2015-06-18 | 2017-01-18 | オリンパス株式会社 | 駆動シャフト、挿入機器および挿入装置 |
| CN109068952B (zh) * | 2016-06-13 | 2020-11-13 | 奥林巴斯株式会社 | 插入设备、安装器具以及驱动力传递单元 |
| US11445890B2 (en) * | 2017-08-17 | 2022-09-20 | David M Schreck | Modular endoscope |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006230620A (ja) * | 2005-02-23 | 2006-09-07 | Olympus Medical Systems Corp | 内視鏡装置 |
| JP2009501555A (ja) * | 2005-05-27 | 2009-01-22 | エム. ジョナサン バーン、 | 内視鏡、推進システムおよび方法 |
| JP2009165640A (ja) * | 2008-01-16 | 2009-07-30 | Fujifilm Corp | 内視鏡用先端フード及びそれを用いる内視鏡ユニット |
| JP2009254554A (ja) * | 2008-04-16 | 2009-11-05 | Mitsubishi Electric Corp | 内視鏡 |
| JP2011520563A (ja) * | 2008-05-17 | 2011-07-21 | スパイラス・メディカル・インコーポレーテッド | 回転前進式カテーテル法のシステム |
| JP2011161138A (ja) | 2010-02-15 | 2011-08-25 | Fujifilm Corp | 内視鏡挿入補助具 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3448228B2 (ja) * | 1998-11-30 | 2003-09-22 | 富士写真光機株式会社 | 内視鏡挿入ガイド管 |
| US20050272976A1 (en) * | 2004-03-15 | 2005-12-08 | Olympus Corporation | Endoscope insertion aiding device |
| JP4418265B2 (ja) * | 2004-03-15 | 2010-02-17 | オリンパス株式会社 | 内視鏡用被検体内推進装置 |
| US20090012359A1 (en) * | 2005-03-28 | 2009-01-08 | Shinsuke Tanaka | Medical instrument insertion apparatus and medical instrument insertion apparatus system |
| JP2006305320A (ja) * | 2005-03-28 | 2006-11-09 | Olympus Corp | 医療器具挿入装置及び医療器具挿入装置システム |
| JP4891560B2 (ja) * | 2005-04-05 | 2012-03-07 | オリンパス株式会社 | 内視鏡用挿入部及び内視鏡システム |
| WO2006109399A1 (ja) * | 2005-04-05 | 2006-10-19 | Olympus Corporation | 内視鏡用挿入部、及び内視鏡システム |
| US8317678B2 (en) * | 2005-05-04 | 2012-11-27 | Olympus Endo Technology America Inc. | Rotate-to-advance catheterization system |
| US20090005645A1 (en) | 2005-05-04 | 2009-01-01 | Frassica James J | Rotate-to- advance catheterization system |
| JP5173136B2 (ja) * | 2006-01-13 | 2013-03-27 | オリンパスメディカルシステムズ株式会社 | 内視鏡装置 |
| JP2009112530A (ja) * | 2007-11-06 | 2009-05-28 | Olympus Medical Systems Corp | 医療器具 |
| JP5128979B2 (ja) * | 2008-02-15 | 2013-01-23 | オリンパスメディカルシステムズ株式会社 | 回転自走式内視鏡 |
-
2012
- 2012-10-29 CN CN201280022446.3A patent/CN103517663B/zh not_active Expired - Fee Related
- 2012-10-29 JP JP2013529231A patent/JP5364867B1/ja not_active Expired - Fee Related
- 2012-10-29 EP EP12872383.0A patent/EP2837319B1/en not_active Not-in-force
- 2012-10-29 WO PCT/JP2012/077894 patent/WO2013145399A1/ja active Application Filing
-
2013
- 2013-07-02 US US13/933,240 patent/US9173549B2/en not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006230620A (ja) * | 2005-02-23 | 2006-09-07 | Olympus Medical Systems Corp | 内視鏡装置 |
| JP2009501555A (ja) * | 2005-05-27 | 2009-01-22 | エム. ジョナサン バーン、 | 内視鏡、推進システムおよび方法 |
| JP2009165640A (ja) * | 2008-01-16 | 2009-07-30 | Fujifilm Corp | 内視鏡用先端フード及びそれを用いる内視鏡ユニット |
| JP2009254554A (ja) * | 2008-04-16 | 2009-11-05 | Mitsubishi Electric Corp | 内視鏡 |
| JP2011520563A (ja) * | 2008-05-17 | 2011-07-21 | スパイラス・メディカル・インコーポレーテッド | 回転前進式カテーテル法のシステム |
| JP2011161138A (ja) | 2010-02-15 | 2011-08-25 | Fujifilm Corp | 内視鏡挿入補助具 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2837319A4 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2015122474A1 (ja) * | 2014-02-12 | 2017-03-30 | 株式会社工販 | 内視鏡用オーバーチューブデバイス |
| CN115969530A (zh) * | 2022-12-02 | 2023-04-18 | 上海埃度医疗器械科技有限公司 | 一种带荧光4k高清摄像加led光源一体机 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20140012084A1 (en) | 2014-01-09 |
| EP2837319A1 (en) | 2015-02-18 |
| JPWO2013145399A1 (ja) | 2015-12-10 |
| JP5364867B1 (ja) | 2013-12-11 |
| EP2837319B1 (en) | 2016-12-14 |
| US9173549B2 (en) | 2015-11-03 |
| CN103517663B (zh) | 2016-04-06 |
| CN103517663A (zh) | 2014-01-15 |
| EP2837319A4 (en) | 2015-12-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5364867B1 (ja) | 生体内導入装置とこの生体内導入装置を有する内視鏡 | |
| JP5437540B1 (ja) | 内視鏡とこの内視鏡の挿入部に装着される螺旋回転部材 | |
| JP5750622B1 (ja) | 挿入装置 | |
| JPWO2012137364A1 (ja) | 装着ユニット及び内視鏡 | |
| JP6218992B2 (ja) | 挿入装置 | |
| JP5572782B1 (ja) | 挿入補助具、挿入本体及び挿入装置 | |
| JP5654185B2 (ja) | 挿抜補助具とこの挿抜補助具を有する内視鏡 | |
| JP5597321B2 (ja) | 挿抜補助具 | |
| JP5829356B2 (ja) | スパイラルキャップ、キャップユニット、スパイラルユニット、及び、導入装置 | |
| JP2011235005A (ja) | 内視鏡装着具 | |
| EP2476452B1 (en) | Intraductal insertion device | |
| JP4524393B2 (ja) | ラパロポート | |
| JP5395315B1 (ja) | 挿入装置、回転筒状部材及び駆動ユニット | |
| WO2014003064A1 (ja) | 挿入装置 | |
| JP5985130B1 (ja) | 挿入装置 | |
| WO2016157567A1 (ja) | 挿入装置 | |
| JP5508690B2 (ja) | 内視鏡 | |
| CN107072497B (zh) | 驱动轴、插入设备以及插入装置 | |
| WO2007032085A1 (ja) | 挿入補助具 | |
| JP2009065998A (ja) | 内視鏡における処置具挿通用チューブの防護構造 | |
| WO2007032055A1 (ja) | 推進力発生手段、挿入補助具及び内視鏡システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201280022446.3 Country of ref document: CN |
|
| ENP | Entry into the national phase |
Ref document number: 2013529231 Country of ref document: JP Kind code of ref document: A |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12872383 Country of ref document: EP Kind code of ref document: A1 |
|
| REEP | Request for entry into the european phase |
Ref document number: 2012872383 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2012872383 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |