JP5128979B2 - 回転自走式内視鏡 - Google Patents
回転自走式内視鏡 Download PDFInfo
- Publication number
- JP5128979B2 JP5128979B2 JP2008034994A JP2008034994A JP5128979B2 JP 5128979 B2 JP5128979 B2 JP 5128979B2 JP 2008034994 A JP2008034994 A JP 2008034994A JP 2008034994 A JP2008034994 A JP 2008034994A JP 5128979 B2 JP5128979 B2 JP 5128979B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- distal end
- motor
- endoscope
- tubular member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000002093 peripheral effect Effects 0.000 claims description 16
- 238000003384 imaging method Methods 0.000 claims description 8
- 238000003780 insertion Methods 0.000 description 96
- 230000037431 insertion Effects 0.000 description 96
- 238000000034 method Methods 0.000 description 37
- 230000008569 process Effects 0.000 description 32
- 238000005452 bending Methods 0.000 description 24
- 229920005989 resin Polymers 0.000 description 16
- 239000011347 resin Substances 0.000 description 16
- 238000010586 diagram Methods 0.000 description 13
- 239000000853 adhesive Substances 0.000 description 12
- 230000001070 adhesive effect Effects 0.000 description 12
- 239000010409 thin film Substances 0.000 description 9
- 238000012545 processing Methods 0.000 description 8
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 7
- 238000004804 winding Methods 0.000 description 7
- PXHVJJICTQNCMI-UHFFFAOYSA-N nickel Substances [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 6
- 238000001514 detection method Methods 0.000 description 5
- 238000005286 illumination Methods 0.000 description 4
- 210000000936 intestine Anatomy 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 210000001124 body fluid Anatomy 0.000 description 3
- 239000010839 body fluid Substances 0.000 description 3
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 230000005415 magnetization Effects 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 229910052751 metal Inorganic materials 0.000 description 3
- 230000001141 propulsive effect Effects 0.000 description 3
- 210000000952 spleen Anatomy 0.000 description 3
- JOYRKODLDBILNP-UHFFFAOYSA-N Ethyl urethane Chemical compound CCOC(N)=O JOYRKODLDBILNP-UHFFFAOYSA-N 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 210000001731 descending colon Anatomy 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000001839 endoscopy Methods 0.000 description 2
- 210000004185 liver Anatomy 0.000 description 2
- 229910052759 nickel Inorganic materials 0.000 description 2
- 229920000728 polyester Polymers 0.000 description 2
- 210000001599 sigmoid colon Anatomy 0.000 description 2
- 229920005992 thermoplastic resin Polymers 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000004397 blinking Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 239000012153 distilled water Substances 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 239000010408 film Substances 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 230000005389 magnetism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000002504 physiological saline solution Substances 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 210000003384 transverse colon Anatomy 0.000 description 1
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/31—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for the rectum, e.g. proctoscopes, sigmoidoscopes, colonoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
- A61B1/00094—Suction openings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00148—Holding or positioning arrangements using anchoring means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00156—Holding or positioning arrangements using self propulsion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00158—Holding or positioning arrangements using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/0016—Holding or positioning arrangements using motor drive units
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/05—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances characterised by the image sensor, e.g. camera, being in the distal end portion
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Endoscopes (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
Description
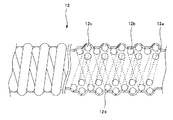
図1から図15は本発明の一実施形態に係り、図1は回転自走式内視鏡を有する内視鏡システムの全体構成を示す外観斜視図、図2は図1の回転自走式内視鏡の主要部及び挿入部の構成を説明するための構成図、図3は図2の挿入部における螺旋形状を備えた外側シャフトを示し、一部を断面で示す要部拡大図、図4は図2の挿入部における外側シャフト内に送通される内側シャフトを示し、一部を断面で示す要部拡大図、図5は図2の外部駆動部の具体的な構成を示す構成図、図6は図2の操作部内のモータボックスの具体的な構成を示す構成図、図7は図6内の内側シャフトの接続部の具体的な構成示す構成図、図8は図2の挿入部の先端接続部の具体的な構成を示し、一部を断面で示す要部拡大図、図9は図2の連結部の具体的な構成を示す構成図、図10は図6のモータボックス内のマグネット着磁パターンと磁気センサとの構成を示す斜視図、図11は図1の内視鏡システム全体の電気的な回路構成を示すブロック図、図12は本実施の形態の回転自走式内視鏡の動作を説明するもので、図11の制御部による制御例を示すフローチャート、図13は図12の制御部の制御動作を説明するためのタイミングチャート、図14は従来の回転自走式内視鏡の主な作用を説明するための説明図、図15は本実施の形態の回転自走式内視鏡の作用を説明するための説明図である。
挿入部6は、先端側から順に先端部9、及び湾曲部10を備えた挿入部本体8と、挿入補助具13と、挿入補助具13と挿入部収納ケース16との間に介装されるコルゲート状チューブからなる先端側案内管14と、第2の駆動部である外部駆動部15と、挿入部収納ケース16と、この挿入部収納ケース16の操作部側に設けられた連結部17と、操作部7と連結部17との間に介装されるコルゲート状チューブからなる操作部側案内管18等によって構成されている。
利点もある。
また、樹脂薄膜12dは、図4に示すようにコイル12dの条線間を繋ぐように、このコイル12dの外周側を被覆する形態で配置されている。これにより、コイル12dの条線間は連設した状態になる。
外部駆動部15は、図2に示すように、少なくとも3つのローラ34、35、36と、第1ローラ34に設けられたギヤーボックス37と、この第1ローラ34を回転させるための回転駆動源である第1モータ38と、この第1ローラの回転量を検出する第1エンコーダ39と、第2ローラ35の回転量を検出する第3エンコーダ40とを有して構成されている。
具体的には、図10に磁気クラッチに使用したマグネット部61の着磁構成が示されている。図10に示すように、磁気センサ63は、回転するマグネット部61の外周側近傍に設けられており、マグネット部61の外周に設けられたセンサ用着磁パターン61bを読み込むことにより、このマグネット部61の回転数を検出し、検出結果を内側シャフトの回転数として後述する第1の制御装置3の制御部(図11参照)に出力する。
この場合、制御部72は、第1エンコーダ39の回転数N1が、前記した閾値L1(図13参照)よりも小さいと判定した場合には、ステップS10の処理で挿入部本体8の先端部9が体腔内の深部まで到達されているか否かの確認を行う。
この場合、制御部72は、第1エンコーダ39の回転数N1が、前記した閾値L2(図13参照)よりも小さい判定した場合には、ステップS13の処理で外側シャフト11に負荷が加わったことを術者に告知するように振動モータ/ランプ19aを制御する。
尚、振動レベル1とは、例えば振動部の振動状態を弱く、またランプを単に点灯状態にした制御状態である。
この場合、制御部72は、第1エンコーダ39の回転数N1が、前記した閾値Lmax(図13参照)よりも小さい判定した場合には、ステップS17の処理で外側シャフト11に大きな負荷が加わったことを術者に告知するように振動モータ/ランプ19aを制御する。
尚、振動レベル2とは、例えば振動部の振動状態を強く、またランプを点滅状態にした制御状態である。
2…回転自走式内視鏡、
3a…モニタ、
3…第1の制御装置、
6…挿入部、
7…操作部、
8…挿入部本体、
9…先端部、
10…湾曲部、
11…外側シャフト、
12…内側シャフト、
13…挿入補助具、
14…先端側案内管、
15…外部駆動部、
16…挿入部収納ケース、
17…連結部、
18…操作部側案内管、
19…モータボックス、
20…モータユニット、
22…主操作部、
37…ギヤーボックス、
38…第1モータ、
39…第1エンコーダ、
40…第3エンコーダ、
46…ギヤーボックス、
47…第2モータ、
48…第2エンコーダ、
60…第1ヨーク、
61…マグネット部、
61a…連結用着磁パターン、
61b…センサ用着磁パターン、
62…第2ヨーク、
63…磁気センサ、
64…接着部、
70…モータドライバ、
71…画像処理部、
72…制御部、
73…メモリ。
Claims (5)
- 長手軸を有し、少なくとも一部表面が螺旋形状に形成された管状部材と、
前記管状部材の内部に挿通され、一端が前記管状部材の先端部に固定され、前記長手軸回りに回転し、前記管状部材の先端部が前記長手軸回りに回転するように前記管状部材の先端部に対して回転運動を伝達可能な回転力伝達部材と、
前記回転力伝達部材を前記長手軸回りに回転させる第1の駆動部と、
前記管状部材を前記長手軸回りに回転させる第2の駆動部と、
を具備したことを特徴とする回転自走式内視鏡。 - 被検体を撮像する撮像素子を備える内視鏡先端部を有し、
前記管状部材の先端は、前記内視鏡先端部の基端に対して前記長手軸回りに回転自在に固定される請求項1に記載の回転自走式内視鏡。 - 前記回転力伝達部材の回転数に同期させて前記第2の駆動部を駆動させる制御部を有する請求項2に記載の回転自走式内視鏡。
- 前記第1の駆動部は、前記管状部材の基端側に設けられ前記回転力伝達部材を基端側から回転させ、
前記第2の駆動部は、前記第1の駆動部よりも先端側に設けて前記管状部材を外周側から回転させることを特徴とする請求項1に記載の回転自走式内視鏡。 - 前記回転力伝達部材の内側に、前記撮像素子の信号を送受するためのケーブルを挿通して設けたことを特徴とする請求項2に記載の回転自走式内視鏡。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008034994A JP5128979B2 (ja) | 2008-02-15 | 2008-02-15 | 回転自走式内視鏡 |
| US12/360,390 US8876703B2 (en) | 2008-02-15 | 2009-01-27 | Rotary self-propelled endoscope |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008034994A JP5128979B2 (ja) | 2008-02-15 | 2008-02-15 | 回転自走式内視鏡 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009189653A JP2009189653A (ja) | 2009-08-27 |
| JP5128979B2 true JP5128979B2 (ja) | 2013-01-23 |
Family
ID=40955746
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008034994A Expired - Fee Related JP5128979B2 (ja) | 2008-02-15 | 2008-02-15 | 回転自走式内視鏡 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8876703B2 (ja) |
| JP (1) | JP5128979B2 (ja) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8235942B2 (en) * | 2005-05-04 | 2012-08-07 | Olympus Endo Technology America Inc. | Rotate-to-advance catheterization system |
| US8317678B2 (en) | 2005-05-04 | 2012-11-27 | Olympus Endo Technology America Inc. | Rotate-to-advance catheterization system |
| US8343040B2 (en) * | 2005-05-04 | 2013-01-01 | Olympus Endo Technology America Inc. | Rotate-to-advance catheterization system |
| US8574220B2 (en) | 2006-02-28 | 2013-11-05 | Olympus Endo Technology America Inc. | Rotate-to-advance catheterization system |
| US8500628B2 (en) | 2006-02-28 | 2013-08-06 | Olympus Endo Technology America, Inc. | Rotate-to-advance catheterization system |
| JP4994771B2 (ja) * | 2006-10-06 | 2012-08-08 | オリンパスメディカルシステムズ株式会社 | 回転自走式内視鏡システム |
| US8870755B2 (en) | 2007-05-18 | 2014-10-28 | Olympus Endo Technology America Inc. | Rotate-to-advance catheterization system |
| CN111110314A (zh) * | 2010-12-21 | 2020-05-08 | 史赛克公司 | 用于电动手术工具的包括主动密封件的控制模块 |
| EP2837319B1 (en) * | 2012-03-29 | 2016-12-14 | Olympus Corporation | Biological introduction apparatus and endoscope having biological introduction apparatus |
| WO2013145803A1 (ja) * | 2012-03-30 | 2013-10-03 | オリンパスメディカルシステムズ株式会社 | 挿入装置、回転筒状部材及び駆動ユニット |
| WO2014007056A1 (ja) * | 2012-07-02 | 2014-01-09 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム |
| WO2014010475A1 (ja) | 2012-07-10 | 2014-01-16 | オリンパスメディカルシステムズ株式会社 | 挿入装置 |
| CN104203076B (zh) * | 2012-09-27 | 2016-10-05 | 奥林巴斯株式会社 | 旋转单元、插入装置、插入体、配设有该插入体的插入装置、以及具有插入体和插入装置的插入系统 |
| EP3005932A4 (en) * | 2013-05-30 | 2017-03-29 | Olympus Corporation | Insertion device |
| EP3170441A4 (en) * | 2014-07-16 | 2018-03-21 | Olympus Corporation | Insertion device |
| CN105979849B (zh) * | 2014-07-17 | 2018-01-30 | 奥林巴斯株式会社 | 插入装置 |
| WO2016063165A1 (en) * | 2014-10-23 | 2016-04-28 | Koninklijke Philips N.V. | Handheld catheter driver with endoscope mount utilizing friction-driven wheel mechanism |
| CN107529950B (zh) * | 2015-06-03 | 2019-07-26 | 奥林巴斯株式会社 | 安装单元 |
| WO2016194412A1 (ja) * | 2015-06-05 | 2016-12-08 | オリンパス株式会社 | 装着ユニット |
| CN107072497B (zh) * | 2015-06-18 | 2020-03-03 | 奥林巴斯株式会社 | 驱动轴、插入设备以及插入装置 |
| WO2017014308A1 (ja) * | 2015-07-23 | 2017-01-26 | オリンパス株式会社 | マニピュレータ及び医療システム |
| JP6634156B2 (ja) | 2016-06-28 | 2020-01-22 | 株式会社日立製作所 | X線エネルギ分布測定装置およびx線治療装置 |
| EP3544482A4 (en) | 2016-11-28 | 2020-07-22 | Adaptivendo LLC | SEPARABLE DISPOSABLE SHAFT ENDOSCOPE |
| CN106974609A (zh) * | 2017-03-28 | 2017-07-25 | 武汉佑康科技有限公司 | 一种柔性内窥镜的电子伸缩结构 |
| CN110831477B (zh) * | 2017-07-07 | 2022-02-25 | 奥林巴斯株式会社 | 内窥镜装置 |
| JP6498856B1 (ja) * | 2017-07-07 | 2019-04-10 | オリンパス株式会社 | 自走式内視鏡装置及びその制御装置 |
| US11647896B2 (en) * | 2019-03-28 | 2023-05-16 | Olympus Corporation | Rollerless tubular connector for transferring rotative force from insertion section of endoscope to spiral tube |
| USD1018844S1 (en) | 2020-01-09 | 2024-03-19 | Adaptivendo Llc | Endoscope handle |
| USD1031035S1 (en) | 2021-04-29 | 2024-06-11 | Adaptivendo Llc | Endoscope handle |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10113396A (ja) * | 1996-10-14 | 1998-05-06 | Takeshi Ikeuchi | 医療機器の推進装置 |
| US7048717B1 (en) * | 1999-09-27 | 2006-05-23 | Essex Technology, Inc. | Rotate-to-advance catheterization system |
| DE19955229C1 (de) * | 1999-11-17 | 2001-08-09 | Winter & Ibe Olympus | Endoskop mit distaler Videokamera und Kameradreheinrichtung |
| JP3816763B2 (ja) * | 2001-06-18 | 2006-08-30 | 住友金属パイプエンジ株式会社 | 管内検査装置及び管内検査方法 |
| US20050272976A1 (en) * | 2004-03-15 | 2005-12-08 | Olympus Corporation | Endoscope insertion aiding device |
| JP4652713B2 (ja) * | 2004-04-02 | 2011-03-16 | オリンパス株式会社 | 内視鏡治療装置 |
| JP4542362B2 (ja) * | 2004-04-15 | 2010-09-15 | オリンパス株式会社 | 内視鏡処置システム |
| JP2006312017A (ja) * | 2005-04-05 | 2006-11-16 | Olympus Corp | 内視鏡用挿入部及び内視鏡システム |
| JP4922618B2 (ja) * | 2006-01-13 | 2012-04-25 | オリンパスメディカルシステムズ株式会社 | 内視鏡及び内視鏡システム |
| JP2007313225A (ja) * | 2006-05-29 | 2007-12-06 | Olympus Medical Systems Corp | 回転自走式内視鏡装置 |
| JP2009055956A (ja) * | 2007-08-29 | 2009-03-19 | Olympus Medical Systems Corp | 回転自走式内視鏡システム |
-
2008
- 2008-02-15 JP JP2008034994A patent/JP5128979B2/ja not_active Expired - Fee Related
-
2009
- 2009-01-27 US US12/360,390 patent/US8876703B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009189653A (ja) | 2009-08-27 |
| US8876703B2 (en) | 2014-11-04 |
| US20090209812A1 (en) | 2009-08-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5128979B2 (ja) | 回転自走式内視鏡 | |
| EP2668887B1 (en) | Endoscope | |
| US8821385B2 (en) | Endoscope and helical rotation member attached to insertion unit of this endoscope | |
| US8177709B2 (en) | Rotary self-propelled endoscope system | |
| US8075474B2 (en) | Endoscope system and medical instrument | |
| US20050272976A1 (en) | Endoscope insertion aiding device | |
| US9345388B2 (en) | Driving force transmitting unit, insertion instrument, rotary unit, insertion body assembly, and insertion device | |
| JP5284570B2 (ja) | 回転自走式内視鏡システム | |
| WO2006129440A1 (ja) | 内視鏡装置 | |
| US10863887B2 (en) | Insertion device having universal cord with extending transmission member | |
| US8491466B2 (en) | Intraductal insertion device | |
| JP2007307241A (ja) | 回転自走式内視鏡、及び回転自走式内視鏡装置 | |
| US20120029282A1 (en) | Guide assembly for endoscope | |
| JP4624714B2 (ja) | 内視鏡 | |
| JP2013208170A (ja) | 内視鏡推進補助装置 | |
| US20110288371A1 (en) | Endoscope device | |
| JP4500310B2 (ja) | 挿入装置、及び内視鏡システム | |
| US20120053409A1 (en) | Guide assembly for endoscope | |
| JP2007306993A (ja) | 回転自走式内視鏡システム | |
| JP2013111341A (ja) | 推進補助装置、駆動力供給方法 | |
| JP2008194179A (ja) | 回転自走式内視鏡システム | |
| JP2005323888A (ja) | 内視鏡 | |
| JP2007313225A (ja) | 回転自走式内視鏡装置 | |
| JP2012110525A (ja) | 内視鏡装着具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101006 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120731 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120807 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120920 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121016 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121101 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5128979 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151109 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |