WO2013125723A1 - 照明方法および顕微観察装置 - Google Patents
照明方法および顕微観察装置 Download PDFInfo
- Publication number
- WO2013125723A1 WO2013125723A1 PCT/JP2013/054821 JP2013054821W WO2013125723A1 WO 2013125723 A1 WO2013125723 A1 WO 2013125723A1 JP 2013054821 W JP2013054821 W JP 2013054821W WO 2013125723 A1 WO2013125723 A1 WO 2013125723A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- wave
- sample surface
- phase
- light
- plane wave
- Prior art date
Links
Images


















Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/06—Means for illuminating specimens
- G02B21/08—Condensers
- G02B21/10—Condensers affording dark-field illumination
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/06—Means for illuminating specimens
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/06—Means for illuminating specimens
- G02B21/08—Condensers
- G02B21/14—Condensers affording illumination for phase-contrast observation
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/24—Base structure
- G02B21/26—Stages; Adjusting means therefor
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/58—Optics for apodization or superresolution; Optical synthetic aperture systems
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/60—Systems using moiré fringes
Definitions
- the present invention relates to an illumination method and a microscope observation apparatus, and more particularly, to an illumination method used in a microscope observation apparatus that resolves a sample surface based on an intensity distribution of light from the sample surface to be microscopically observed of the sample, and such illumination.
- the present invention relates to a microscopic observation apparatus using the method.
- a high-resolution detection device constituted by a microscopic observation apparatus (such as an optical microscope) using this type of illumination method and a computer
- a light source that emits laser light and a light beam from the light source are divided and reflected 2
- a projection optical system consisting of a lens, beam splitter, multiple reflectors, piezoelectric elements, prisms, etc., that performs standing wave illumination by interfering the light beam on the sample surface, and a lens such as an objective lens for the light beam from the sample surface
- An observation optical system that transmits light and receives light by a light receiving unit such as a CCD, and a single reflecting mirror driven by a piezoelectric element shifts the standing wave illumination several times in nano-order and inputs the amount of light received measured by the light receiving unit.
- a computer including a computer that performs super-resolution by analysis has been proposed (for example, see Patent Document 1).
- n ⁇ m simultaneous equations obtained by shifting standing wave illumination m times with respect to the amount of light received by n CCDs or the like are used for super-resolution.
- resolution exceeding the Rayleigh limit is performed by post-processing nano-order light scattering changes by a computer.
- a microscopic observation apparatus such as an optical microscope is controlled by a physical diffraction limit, and therefore, it is difficult to observe a structure having a wavelength of about half a wavelength or less.
- microscopic observation devices such as optical microscopes have superior characteristics that other microscopic observation devices such as electron microscopes and atomic force microscopes do not require a vacuum environment and have low invasiveness and high speed.
- a device that performs super-resolution using structural illumination by standing waves such as the high-resolution detection device described above, is useful in that it can exceed the diffraction limit with a relatively simple configuration. Met.
- incoherent imaging is possible even if the target of super-resolution processing uses a coherent light source.
- it is limited to special samples such as simple fluorescent samples, and there is a problem that the super-resolution processing cannot be applied to a general sample. That is, in the super-resolution technique as described above, it is desirable to use a coherent light source such as a laser beam because it is necessary to form brighter and more sensitive structural illumination in order to obtain the highest possible resolution.
- image reconstruction generally requires computer reconstruction, it was a technique that could be applied effectively only to incoherent imaging where the image formation is not a destructive interference but a sum of intensities. .
- the main object of the illumination method and microscope observation apparatus of the present invention is to expand the application range of super-resolution processing using light wave information from the sample surface.
- the illumination method and the microscopic observation apparatus of the present invention employ the following means in order to achieve the above-described main object.
- the lighting method includes: An illumination method used in a microscopic observation apparatus for resolving a sample surface based on an intensity distribution of light from a sample surface to be microscopically observed of the sample, A two-beam standing wave obtained by irradiating a plane wave of two light waves generated from light from the light source unit so as to face each other in an oblique direction is irradiated from the light from the light source unit while irradiating the sample surface. Irradiating the sample surface with a three-beam standing wave by irradiating a bias plane wave obtained by adjusting the amplitude and phase of the plane wave of the single light wave from the normal direction to the sample surface; It is characterized by that.
- a two-beam standing wave obtained by irradiating a plane wave of two light waves generated from light from a light source unit so as to face each other in an oblique direction is irradiated on a sample surface while being irradiated from a light source unit.
- a sample plane is irradiated with a three-beam standing wave by irradiating the sample plane with a bias plane wave obtained by adjusting the amplitude and phase of the plane wave of one light wave generated from this light from the normal direction.
- the bias plane wave raises the electric field displacement consisting of other light wave groups existing on the sample surface due to its amplitude to the positive side or the negative side, so the three-beam standing wave consisting of the two-beam standing wave and the bias plane wave is sampled.
- this irradiation increases the electric field displacement of the reflected light and scattered light from the sample surface to the positive side and the negative side. This suppresses cancellation of light wave information from the sample surface, and super-resolution using light wave information from the sample surface, such as applying super-resolution processing to general samples without being limited to fluorescent samples.
- the application range of processing can be expanded.
- “super-resolution” means that a clear image is obtained up to the details of the object through the optical system, which can be paraphrased as high resolution, and more specifically, observation optics. It can also be said that the resolution exceeds the diffraction limit of the system.
- the bias plane wave has a reference time that is predetermined as a time when the phase of the electric field displacement of the two-beam standing wave becomes a value of 0 at each position on the sample surface.
- the electric field displacement is adjusted so that the electric field displacement alternately alternates between the positive side and the negative side with the same displacement regardless of the position on the sample surface, and the electric field displacement is composed of other light wave groups existing on the sample surface. Is a plane wave that is adjusted so as to be raised only to the positive side or to the negative side only.
- the electric field distribution over the sample surface periodically appears in a standing wave shape on the sample surface, but by applying illumination with a bias plane wave on the sample surface.
- the electric field distribution that is raised to the extent that only the positive side or only the negative side is raised can be made to appear periodically.
- the “reference time” is defined as a time when the electric field displacement of the standing wave becomes a value 0 or approximately 0 at each position on the sample surface, or the electric field of the standing wave and the sample surface
- the electric field displacement which is the sum of the reflected light waves (all reflected light waves) and the electric field, can be determined in advance as a time when the electric field displacement becomes 0 or substantially 0 at each position on the sample surface.
- the bias plane wave is adjusted so that the amplitude is the same as the amplitude of the two-beam standing wave, and the phase is synchronized with the two-beam standing wave. It can also be characterized by being adjusted. In this way, the electric field distribution on the sample surface irradiated with the three-beam standing wave can be raised to such an extent that it is just on the positive side or only on the negative side.
- the sample surface is illuminated by shifting the phase of the bias plane wave by a predetermined amount until reaching 2 ⁇ with illumination of the sample surface by the two-beam standing wave.
- a process for obtaining a light distribution for each shift which is an intensity distribution of light reflected or scattered from the sample surface, and a Fourier transform image obtained by Fourier transforming the light distribution for each shift to the two-beam standing wave
- a process of increasing the amplitude of the bias plane wave when not, while decreasing the amplitude of the bias plane wave when the number of images for determination is equal to or greater than a threshold value is repeated until the number of the determination images is less than the threshold, and the amplitude when the number of the determination images is less than the threshold is set as the initial amplitude of the bias plane wave and the number of the determination images It is also possible to illuminate a three-beam standing wave adjusted with the phase corresponding to the image for determination when is less than the threshold as the initial phase of the bias plane wave. In this way, the electric field distribution on the sample surface irradiated with the three-beam standing wave can be easily and automatically raised to just the positive side or the negative side.
- a reference sample is used for adjusting the three-beam standing wave.
- the reference sample has a periodic structure that generates moire fringes between the standing wave and a line-and-space pattern in which the line pitch is known. Then, the three-beam standing wave is incident on the reference sample, and adjustment is performed by using the generated moire fringe pattern.
- the phase of the three-beam standing wave is sequentially shifted by sequentially shifting the phase of the two-beam standing wave and the phase of the bias plane wave in synchronization. It can also be done.
- the phase of the three-beam standing wave is sequentially shifted by sequentially shifting the phase of one plane wave of the two-beam standing wave by a predetermined phase and sequentially shifting the phase of the bias plane wave by half of the predetermined phase. It can also be shifted.
- the phase may be sequentially shifted.
- phase of the three-beam standing wave can be sequentially shifted while maintaining the phase synchronization of the three-beam standing wave composed of the two-beam standing wave and the bias plane wave.
- shifting the phase means moving the position of the node of the two-beam standing wave or the three-beam standing wave.
- the microscopic observation apparatus of the present invention is A microscopic observation apparatus that resolves the sample surface based on the intensity distribution of light from the sample surface to be microscopically observed of the sample, A light source unit; A two-beam standing wave irradiating means for irradiating the sample surface with a two-beam standing wave obtained by irradiating a plane wave of two light waves generated from the light from the light source unit so as to face each other in an oblique direction; and A bias plane wave irradiation unit that irradiates a bias plane wave obtained by adjusting the amplitude and phase of a plane wave of one light wave generated from light from the light source unit from the normal direction to the sample surface, and An illumination device for irradiating the sample surface with a three-beam standing wave by a beam standing wave and the bias plane wave; A light distribution acquisition unit that acquires, as a light distribution, an intensity distribution of light from the sample surface that is reflected and / or scattered by irradiation of the three
- the illumination device irradiates the sample surface with a two-beam standing wave obtained by irradiating a plane wave of two light waves generated from the light from the light source unit so as to face each other in an oblique direction.
- a two-beam standing wave and a bias plane wave are generated by irradiating a bias plane wave obtained by adjusting the amplitude and phase of a plane wave of one light wave generated from the light from the light source unit from the normal direction to the sample surface.
- the sample surface is irradiated with a three-beam standing wave.
- the phase of the three-beam standing wave is sequentially shifted to obtain a light distribution that is the intensity distribution of light reflected or scattered from the sample surface for each shift, and super-resolution processing is performed on the obtained light distribution for each shift.
- the bias plane wave raises the electric field displacement consisting of other light wave groups existing on the sample surface due to its amplitude to the positive side or the negative side, so the three-beam standing wave consisting of the two-beam standing wave and the bias plane wave is sampled. By irradiating the surface, this irradiation increases the electric field displacement of the reflected light and scattered light from the sample surface to the positive side and the negative side.
- the phase shifts means that the position of the node of the three-beam standing wave moves.
- super-resolution means that a clear image is obtained up to the details of the object through the optical system, and can also be referred to as high resolution. More specifically, the observation optical system It can also be said that the resolution exceeds the diffraction limit.
- the bias plane wave irradiation unit preliminarily sets the phase of the bias plane wave as a time when the electric field displacement of the two-beam standing wave becomes a value of 0 at each position on the sample surface.
- the electric field displacement is adjusted so that the electric field displacement alternately alternates between the positive side and the negative side with the same displacement regardless of the position on the sample surface at a predetermined reference time, and the amplitude of the bias plane wave is adjusted to the sample surface.
- It can also be an irradiating unit that adjusts the electric field displacement made up of other light wave groups present above to the extent that only the positive side or only the negative side is raised.
- the electric field distribution over the sample surface periodically appears in a standing wave shape on the sample surface, but by applying illumination with a bias plane wave on the sample surface.
- the electric field distribution that is raised to the extent that only the positive side or only the negative side is raised can be made to appear periodically.
- the “reference time” is defined as a time when the electric field displacement of the standing wave becomes a value 0 or approximately 0 at each position on the sample surface, or the electric field of the standing wave and the sample surface
- the electric field displacement which is the sum of the reflected light waves (all reflected light waves) and the electric field, can be determined in advance as a time when the electric field displacement becomes 0 or substantially 0 at each position on the sample surface.
- each electric field of the plane wave of the two light waves is E1, E2, an electric field of the bias plane wave is E3, and each amplitude of the plane wave of the two light waves is A
- the amplitude of the bias plane wave is equal to that of the two-beam standing wave
- each wave number of the plane wave of the two light waves and the bias plane wave is k
- the incident angle of the plane wave of the two light waves with respect to the sample surface is ⁇
- the two-beam standing wave illumination where x is the position in the direction of the intersection between the plane wave incident surface and the sample surface, y is the position in the normal direction relative to the sample surface, ⁇ is the angular frequency, and t is the time.
- the unit is an illumination unit that performs illumination using the plane wave of the two light waves having the relationship of the following formulas (1) and (2), and the bias plane wave illumination unit has the relationship of the following formula (3):
- Use bias plane waves to illuminate It can also be a lighting unit to be performed. In this way, the illumination with the bias plane wave can more reliably generate an electric field that is raised so that the positive and negative electric field distribution on the sample surface based on the illumination with the two-beam standing wave is not exactly positive or negative. .
- the illumination is performed using the plane wave of the two light waves having the relationship of the expressions (1) and (2) and the illumination is performed using the bias plane wave having the relationship of the expression (3)
- the electric field of each reflected light wave due to reflection of the plane wave of the two light waves on the sample surface is E1r, E2r, the reflectivity of the plane wave of the two light waves on the sample surface is r1, r2, and the sample surface of the plane wave of the two light waves.
- the phase difference of each reflected light wave due to reflection with respect to the plane wave of the two light waves is ⁇ 1, ⁇ 2, the electric field of the reflected light wave due to reflection of the bias plane wave on the sample surface is E3r, and the bias plane wave of the sample surface is The reflectance is r3, the phase difference of the reflected light wave with respect to the bias plane wave due to reflection of the bias plane wave on the sample surface is ⁇ 3, and the amplitude is equal to the standing wave.
- the corrected amplitude when correcting the amplitude of the bias plane wave is P
- the phase correction amount when correcting the phase of the bias plane wave is ⁇ D
- the bias plane wave illuminating unit is expressed by the following equations (4) to (6).
- the bias plane wave illumination unit is based on an electric field displacement of each reflected light wave on the sample surface between the plane wave of the two light waves and the bias plane wave. Illumination may be performed using the reference time and amplitude. In this way, the illumination by the bias plane wave with corrected phase and amplitude, the illumination by the standing wave, the reflected light wave of the two-wave plane wave to generate this standing wave, and the reflected light wave of the bias plane wave It is possible to generate an electric field obtained by raising the electric field distribution over the positive and negative on the sample surface to the extent that the electric field distribution does not extend over the positive and negative.
- the bias plane wave illuminator adjusts the amplitude to be the same as the amplitude of the two-beam standing wave and adjusts the phase to synchronize with the two-beam standing wave.
- it may be an irradiation unit that irradiates the bias plane wave. In this way, the electric field distribution on the sample surface irradiated with the three-beam standing wave can be raised to such an extent that it is just on the positive side or only on the negative side.
- illumination with the bias plane wave is performed by shifting the phase of the bias plane wave by a predetermined amount until reaching 2 ⁇ with illumination by the two-beam standing wave by the two-beam standing wave illumination unit.
- Bias plane wave phase shift control for controlling the illumination device to perform, and a light distribution for each shift for controlling the light distribution acquisition unit to acquire a light distribution for each shift every time the phase of the bias plane wave is shifted by the predetermined amount
- the three-beam constant having a period twice as long as the period of the peak derived from the moire fringes based on the two-beam standing wave from the Fourier transform image obtained by performing Fourier transform on the light distribution for each shift.
- the control of the image for determination includes three controls including amplitude adjustment control for controlling the illumination device to decrease the amplitude of the bias plane wave. It is repeatedly executed until the number becomes less than the threshold, and the amplitude when the number of images for determination is less than the threshold is set as the initial amplitude of the bias plane wave and the number of images for determination is less than the threshold
- An initial value setting unit that sets a phase corresponding to the determination image as an initial phase of the bias plane wave may be provided. In this way, the electric field distribution on the sample surface irradiated with the three-beam standing wave can be easily and automatically raised to just the positive side or the negative side.
- the shift control unit controls the illuminating device so as to sequentially shift the phase of the two-beam standing wave and the phase of the bias plane wave in synchronization, thereby maintaining the three-beam standing. It can also be a controller that sequentially shifts the wave phase.
- the shift control unit controls the illumination device so as to sequentially shift the phase of one plane wave of the two-beam standing wave by a predetermined phase and sequentially shift the phase of the bias plane wave by half of the predetermined phase.
- the control unit can sequentially shift the phase of the three-beam standing wave.
- the shift control unit sequentially changes the optical path length of one plane wave of the two-beam standing wave by a predetermined distance, and sequentially changes the optical path length of the bias plane wave by half of the predetermined distance. It may be a control unit that sequentially shifts the phase of the three-beam standing wave by controlling the apparatus. In this way, the phase of the three-beam standing wave can be sequentially shifted while maintaining the phase synchronization of the three-beam standing wave composed of the two-beam standing wave and the bias plane wave. As a result, it is possible to obtain optical information such as reflected light and scattered light from the sample surface while shifting the phase of the three-beam standing wave.
- the microscope observation apparatus further includes a rotation stage for placing the sample and rotating the sample about the normal direction of the sample surface as a rotation axis, and the shift control unit rotates the sample surface by 90 degrees.
- the lighting device is controlled so that the phase of the three-beam standing wave is sequentially shifted before and after the sample surface is rotated by 90 degrees, and the phase of the three-beam standing wave is It may be a control unit that controls the light distribution acquisition unit so as to acquire the light distribution every time the shift is performed. By doing this, it is possible to easily irradiate the three-beam standing wave in two directions orthogonal to the sample surface without adjusting the three-beam standing wave and sequentially shift the phase to obtain the light distribution.
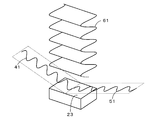
- FIG. 1 It is a block diagram which shows the outline of a structure of the microscope observation system 10 containing the illuminating device 20 as one Example of this invention. It is explanatory drawing which shows typically the mode of the illumination by the plane waves 41 and 51 for standing wave generation with which the sample surface 23 is irradiated by the illuminating device 20, and the illumination by the bias plane wave 61. FIG. It is explanatory drawing which shows an example of the relationship between the sample surface 23 and x-axis, y-axis, and z-axis direction. It is explanatory drawing which shows typically the mode of the prior art example which performs the illumination by only the plane waves 41 and 51 for standing wave generation with respect to the sample surface 23. FIG.
- FIG. 12 is a flowchart illustrating an example of a super-resolution processing program executed by a computer 170. It is explanatory drawing which shows typically the process by the super-resolution process program in FIG. It is a flowchart which shows an example of an initial adjustment program.
- FIG. 1 is a configuration diagram showing an outline of a configuration of a microscopic observation system 10 including an illumination device 20 as an embodiment of the present invention.
- FIG. 2 shows one surface of a sample 22 (hereinafter referred to as a sample surface) by the illumination device 20. It is explanatory drawing which shows typically the mode of the illumination by the two plane waves 41 and 51 for standing wave generation
- FIG. Examples of the sample 22 include semiconductor wafers, micro industrial products such as MEMS (Micro Electro Mechanical Systems), Micro-TAS (Micro Total Analysis Systems), and living cells as non-stained observation targets.
- MEMS Micro Electro Mechanical Systems
- Micro-TAS Micro Total Analysis Systems
- the microscope observation system 10 includes a lighting device 20 that irradiates a sample surface 23 with three lights (three light waves and three light beams), and a plurality of lenses including, for example, an objective lens. From the sample surface 23 using a lens mechanism 14 as an observation optical system that transmits light from the surface 23 and a plurality of light receiving elements such as a CCD (charge coupled semiconductor device) or a CMOS (complementary metal oxide semiconductor device).
- a CCD charge coupled semiconductor device
- CMOS complementary metal oxide semiconductor device
- the light receiving unit 16 that receives the light as measurement light through the lens mechanism 14, the general-purpose computer 70 that drives various adjustment mechanisms of the illumination device 20 (hereinafter referred to as adjustment PC), and the amount of light received by the light receiving unit 16
- a general-purpose computer 80 (hereinafter referred to as “analysis PC”) that performs super-resolution by analyzing the amount of received light received as a signal.
- a microscope observation device 12 for example, an optical microscope
- the illumination device 20 the lens mechanism 14, and the light receiving unit 16, and the microscope observation system 12, the adjustment PC 70, and the analysis PC 80 are used. 10 is configured.
- the illuminating device 20 of the embodiment is arranged at a position facing the light source unit 30 that divides and emits coherent light such as laser light into three parts and the sample surface 23 as the center, and causes the sample surface 23 to interfere with each other.
- a plane wave (hereinafter referred to as a bias plane wave) 61 that is arranged vertically above the sample surface 23 and that raises (adds bias to) the electric field displacement of the standing wave when it interferes with the standing wave on the sample surface 23 (see FIG. 2).
- a bias plane wave illuminating unit 60 for illuminating the sample surface 23. Since the illumination by the bias plane wave 61 is performed on the sample surface 23 from vertically above the sample surface 23, it functions as epi-illumination.
- the light source unit 30 is divided by a light source device 32 as a coherent light source, a beam splitter 34 that divides the light from the light source device 32 into two and makes one of them incident on the bias plane wave illumination unit 60, and the beam splitter 34.
- a beam splitter 36 that makes the other light incident, splits the light into two, and makes one of them enter the standing wave plane wave illumination unit 40 and the other enter the standing wave plane wave illumination unit 50.
- Each of the standing wave plane wave illumination units 40 and 50 is configured by a polarizer, a wavelength plate, or the like, and makes incident light from the beam splitter 36 S-polarized light whose polarization plane (direction of electric field) is parallel to the sample plane 23.
- the relative phase difference adjusting mechanisms 46 and 56 for adjusting the phases of the plane waves 41 and 51 and mirrors and piezos.
- Incidence angle fine adjustment mechanisms 48 and 58 configured by actuators and the like to finely adjust the incident angles of the plane waves 41 and 51 with respect to the sample surface 23.
- the incident angle of the plane waves 41 and 51 with respect to the sample surface 23 depends on the relative positional relationship between the sample 22 and the standing wave plane wave illumination units 40 and 50, and the plane waves 41 and 51 interfere with the sample surface 23.
- the bias plane wave illumination unit 60 includes a polarizer, a wave plate, and the like, and adjusts the incident light from the beam splitter 34 so that the plane of polarization (the direction of the electric field) matches the plane of polarization of the plane waves 41 and 51 for generating standing waves.
- a polarization adjustment mechanism 62 that adjusts the amplitude of the bias plane wave 61, which is configured by a polarizer, a wavelength plate, and the like, and a phase of the bias plane wave 61 that is configured by a wavelength plate, a phase modulation element, a piezoelectric actuator, and the like.
- an incident angle fine adjustment mechanism 68 that is configured by a mirror, a piezo actuator, or the like and finely adjusts so that the bias plane wave 61 is perpendicularly incident on the sample surface 23.
- the incident angle of the bias plane wave 61 with respect to the sample surface 23 depends on the relative positional relationship between the sample 22 and the bias plane wave illumination unit 60, and the illumination with the bias plane wave 61 is ideally reflected on the sample surface 23 as much as possible. Although it has been adjusted in advance so as to provide illumination, fine adjustment by the incident angle fine adjustment mechanism 68 is possible.
- the adjustment PC 70 has a CPU, ROM, RAM, HDD, input / output port, etc. (not shown), is connected to an input device such as a keyboard and a mouse, and is connected to an output device such as a display.
- By outputting a drive signal through the output port so that the above is performed various adjustment mechanisms of the lighting device 20 are driven.
- the analysis PC 80 has a CPU, ROM, RAM, HDD, input / output port, etc. (not shown), is connected to an input device such as a keyboard and a mouse, and is connected to an output device such as a display.
- the received light amount is input as a signal through the input port, and the received light amount is applied to and analyzed by a predetermined algorithm adopted by a program stored in the ROM in advance to perform super-resolution.
- the predetermined algorithm is a super-resolution process in which super-resolution is performed by shifting illumination by a standing wave generated on the sample surface 23 due to interference of the plane waves 41 and 51 (hereinafter also referred to as standing wave illumination) a plurality of times. (Super-resolution method) is realized, and in the embodiment, the following algorithm is used.
- ) is acquired in advance. Then, by adjusting the phase of at least one of the plane waves 41 and 51 for generating the standing wave, the position of the standing wave illumination on the sample surface 23 is shifted m times (for the standing wave illumination).
- n received light amounts Xi by the light receiving unit 16 are input. Further, n received light quantity Xi, illumination light quantity Ij, and diffraction contribution ratio D (
- such imaging is performed by shifting the standing wave illumination in the direction of the line of intersection between the incident surface of the plane waves 41 and 51 for generating the standing wave 41 and the sample surface 23 (hereinafter referred to as the x-axis direction). It was performed by shifting the standing wave illumination in the direction perpendicular to the x-axis direction (hereinafter referred to as the z-axis direction) on the sample surface 23. Thereby, a clearer image can be acquired. Since this algorithm does not form the core of the present invention, further detailed description is omitted.
- FIG. 3 shows an example of the relationship between the sample surface 23 and the x-axis, y-axis, and z-axis directions.
- the y-axis direction is a normal direction to the sample surface 23.
- the incident surface that defines the x-axis is also shown for reference.
- the state of the electric field on the sample surface 23 will be described below using each of the x-axis, y-axis, and z-axis directions as necessary.
- “super-resolution” means to acquire a clear image up to details of an object through an optical system such as a lens, for example, and can be paraphrased as high resolution. Specifically, it can be said that the resolution exceeds the diffraction limit of the observation optical system.
- “shifting the standing wave illumination (standing wave illumination)” means that the position of the node of the standing wave forming the standing wave illumination (standing wave illumination) is set in a predetermined direction. It means to move.
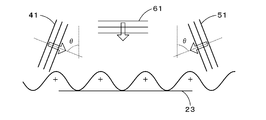
- FIG. 4 is an explanatory diagram schematically showing a state of a conventional example in which illumination with only the plane waves 41 and 51 for generating the standing wave is performed on the sample surface 23, and FIG. 5 is a plane wave for generating the standing wave.
- FIG. 6 is an explanatory view schematically showing an embodiment in which illumination by 41 and 51 and illumination by a bias plane wave 61 are performed on the sample surface 23, and FIG. 6 shows standing wave illumination and bias plane waves by plane waves 41 and 51. It is explanatory drawing which shows an example of the mode of the time change of the electric field on the sample surface 23 when the illumination by 61 is made to interfere on the sample surface 23.
- FIG. 4 is an explanatory diagram schematically showing a state of a conventional example in which illumination with only the plane waves 41 and 51 for generating the standing wave is performed on the sample surface 23, and FIG. 5 is a plane wave for generating the standing wave.
- FIG. 6 is an explanatory view schematically showing an embodiment in which illumination by 41 and 51 and illumination by a bias plane wave
- ⁇ indicates an incident angle (scalar amount in the embodiment) of the plane waves 41 and 51 with respect to the sample surface 23, and the waveform on the sample surface 23 indicates the waveform of each illumination on the sample surface 23.
- the waveform of the electric field is originally a waveform in which the electric field displacement changes with time in the z-axis direction on the sample surface 23, but for convenience of illustration, it is shown as a waveform that vibrates in the vertical direction on the paper surface, which is the y-axis direction. ing.
- the alternate long and short dash line indicates the electric field distribution (distribution of electric field displacement) of only the standing wave due to the interference of the plane waves 41 and 51
- the broken line indicates the electric field distribution of only the bias plane wave 61
- the solid line indicates the plane waves 41 and 51 and the bias.
- the electric field distribution of the sum on the sample surface 23 of each illumination by interference with the plane wave 61 is shown.
- the electric field distribution repeats the states (a) to (h) in order.
- the states shown in FIGS. 6A and 6E are preliminarily tested as times when the electric field displacement of the standing wave becomes zero at each position on the sample surface 23 (each position on the xz plane). And shows the state of electric field distribution at the “reference time” determined by analysis.
- the electric fields of the plane waves 41 and 51 of the two light waves for generating standing waves are E1, E2, the amplitudes of the plane waves 41 and 51 are A, the wave numbers of the plane waves 41 and 51 are k, and the plane waves 41 and 51 are
- the incident angle with respect to the sample surface 23 is ⁇ (described above)
- the position of the plane waves 41 and 51 in the intersecting direction between the incident surface and the sample surface 23 is x (described above)
- the normal direction position relative to the sample surface 23 is y (described above).
- ⁇ be the angular frequency
- t be the time.
- the amplitude A and the incident angle ⁇ are target values to be adjusted, and the electric fields E1 and E2 are target values to be finally obtained (the waveforms of the plane waves 41 and 51).
- the wave number k and the angular frequency ⁇ are values determined in advance based on the characteristics of the light source unit 30.
- the standing wave plane wave illuminating units 40 and 50 illuminate the sample surface 23 with the two-wave plane waves 41 and 51 having the relationship of the following expressions (1) and (2).
- the adjustment PC 70 drives the polarization adjustment mechanisms 42 and 52 so that the incident light from the beam splitter 36 is adjusted to S-polarized light whose polarization plane is parallel to the sample surface 23, and the plane waves 41 and 52 are driven.
- the amplitude adjustment mechanisms 44 and 54 are driven so that each amplitude of 51 is adjusted to the amplitude A as a target value, and the standing wave generated on the sample surface 23 due to the interference of the plane waves 41 and 51 is determined as described above.
- the relative phase difference adjusting mechanisms 42 and 52 are driven so that the phases of the plane waves 41 and 51 are adjusted when the shift is performed in the nano-order according to the algorithm, and the incident angles of the plane waves 41 and 51 with respect to the sample surface 23 are set to the target values.
- the incident angle fine adjustment mechanisms 48 and 58 are driven so that the fine adjustment to the incident angle ⁇ is performed.
- FIG. 6 As shown in the waveform 4 and the waveform of the one-dot chain line in FIG. 6, a positive and negative electric field distribution periodically appears in a standing wave shape on the sample surface 23. That is, in the electric field distribution on the sample surface 23, a distribution is formed in which adjacent peaks span (strand).
- the electric field of the bias plane wave 61 is E3, the amplitude of the bias plane wave 61 (hereinafter referred to as bias amplitude) is equal to the standing wave generated by the interference of the plane waves 41 and 51 (that is, twice the amplitude A). ),
- the wave number of the bias plane wave 61 is k, the position in the normal direction with respect to the sample surface 23 is y (described above), the angular frequency is ⁇ , and the time is t.
- the bias amplitude is a target value to be adjusted, and the electric field E3 is a target value (waveform of the bias plane wave 61) to be finally obtained.
- the wave number k and the angular frequency ⁇ are values determined in advance based on the characteristics of the light source unit 30.
- the bias plane wave illumination unit 60 performs illumination on the sample surface 23 with the bias plane wave 61 having the relationship of the following expression (3).
- the adjustment PC 70 drives the polarization adjustment mechanism 62 so that the polarization plane of the incident light from the beam splitter 34 is adjusted to the polarization planes of the plane waves 41 and 51 for generating standing waves, and the bias is applied.
- the amplitude adjustment mechanism 64 is driven so that the bias amplitude of the plane wave 61 is adjusted to a target value (twice the amplitude A), and the phase of the electric field E3 in the equation (3) (y is independent of the position in the x-axis direction).
- the phase difference adjusting mechanism 62 is driven so as to obtain an initial phase corresponding to the position in the axial direction, and the incident angle fine adjusting mechanism 68 is adjusted so that fine adjustment is performed so that the bias plane wave 61 is incident perpendicularly to the sample surface 23. To drive.
- the bias plane wave illumination unit 60 When the bias plane wave illumination unit 60 is thus driven and illumination with the bias plane wave 61 having the relationship of the expression (3) is performed (assuming that only the illumination with the bias plane wave 61 is performed), the bias plane wave 61 is represented by a broken line in FIG. As shown in the waveform of, the sample is sampled on the basis of a “reference time” that is predetermined as a time when the electric field displacement of the standing wave becomes zero at each position on the sample surface 23 (each position on the xz plane). Synchronized with the standing wave (see the dashed line in FIG.
- the amplitude for bias is equal to the amplitude of the standing wave, that is, a value (value 2A) that is twice the amplitude A of the plane waves 41 and 51 for generating the standing wave.
- the electric field displacement of the standing wave on the sample surface 23 is just the positive side or the negative side only. The amplitude is raised.
- the electric field distribution over the sample surface 23 by standing wave illumination is raised so that it is just on the positive side or only on the negative side.
- the electric field distribution (that is, raised so as not to be exactly positive or negative) can appear periodically. That is, it is possible to form a distribution in which adjacent peaks are not positive or negative in the waveform of the electric field distribution on the sample surface 23.
- FIG. 7 is an explanatory diagram for explaining an example of the state of resolving two resolution targets on the sample surface 23 of the conventional example of FIG. 4, and FIG. 8 is a sample of the embodiment of FIG.
- FIG. 9 is an explanatory diagram for explaining an example of the state of resolving two resolution targets on the surface 23.
- FIG. 9 shows a sample of standing wave illumination by plane waves 41 and 51 and illumination by a bias plane wave 61. It is explanatory drawing which shows an example of the mode of the time change of the illumination intensity (square value of an electric field) on the sample surface 23 when making it interfere on the surface 23.
- the thin solid line indicates the electric field distribution of the sum of the illumination on the sample surface 23 due to the interference between the plane waves 41 and 51 and the bias plane wave 61, and the thick solid line after the interference between the plane waves 41 and 51 and the bias plane wave 61.
- the illumination intensity on the sample surface 23 is shown.
- four states corresponding to the states of FIGS. 6B, 6C, 6F, and 6G are shown.
- the super-resolution processing (super-resolution technique) using structural illumination uses a sample response to illumination having a fine periodic illumination intensity distribution.
- FIG. 7 in the case of conventional standing wave illumination only, adjacent peaks in the electric field distribution (electric field displacement distribution) on the sample surface 23 are positive and negative. The light wave information between them cancel each other.
- the application of super-resolution processing is limited only to special samples such as fluorescent samples that can be incoherently imaged using a coherent light source, and super-resolution processing should be applied to a wide range of general samples. I could not.
- FIG. 7 shows that shows that can be incoherently imaged using a coherent light source.
- the adjacent peak in the electric field distribution on the sample surface 23 does not extend in the positive and negative directions. Since it is possible to generate a fine periodic illumination intensity distribution (see FIG. 9), there is no cancellation of light wave information between adjacent peaks from the sample surface 23, and an image is obtained by adding the light wave information. Formation can be performed.
- the super-resolution processing can be applied to a general sample regardless of the presence or absence of coherence of measurement light including scattered light emitted from the sample.
- the bias plane wave 61 is synchronized with the standing wave and vibrates with the same amplitude as the standing wave, so that the positive and negative on the sample surface 23 by the standing wave illumination is obtained.
- the electric field distribution over the sample surface 23 is raised by standing wave illumination because the electric field distribution over the area is raised so that it is just on the positive side or only on the negative side (that is, it is raised so as not to be over just the positive side). Can be more reliably prevented from canceling out the light wave information between adjacent peaks from the sample surface 23, compared to the amount of increase that is smaller than the amount of increase that is just the positive side or only the negative side.
- the image formation with a clearer shadow is formed as compared with the case where the electric field distribution over the positive and negative on the sample surface 23 is increased only by the positive side or the negative side only by the standing wave illumination. Can be performed.
- FIG. 10 shows computer simulation conditions when applying the super-resolution processing
- FIG. 11 shows an example of an illumination intensity distribution obtained by a general optical microscope
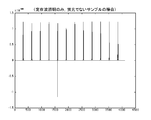
- FIG. FIG. 13 shows an example of an illumination intensity distribution as a computer simulation result when super-resolution processing is performed under the conditions shown in FIG. 10 by irradiating only standing wave illumination.
- FIG. 13 shows standing wave illumination for a fluorescent sample.
- FIG. 14 shows an example of an illumination intensity distribution as a computer simulation result when super-resolution processing is performed under the conditions shown in FIG.
- FIG. 10 shows computer simulation conditions when applying the super-resolution processing
- FIG. 11 shows an example of an illumination intensity distribution obtained by a general optical microscope
- FIG. 13 shows an example of an illumination intensity distribution as a computer simulation result when super-resolution processing is performed under the conditions shown in FIG. 10 by irradiating only standing wave illumination.
- FIG. 13 shows standing wave illumination for a fluorescent sample.
- FIG. 14 shows an example of an illumination intensity distribution as a computer simulation result when super-resolution
- the simulation condition shown in FIG. 10 is that the wavelength of light from the light source is 488 nm, the standing wave pitch (length between nodes) is 270 nm, and standing wave illumination in a predetermined direction in the super-resolution processing.
- the number of shifts is 10, the shift step size (shift amount) for one time is 25 nm, the optical system NA (lens numerical aperture of the lens mechanism 14 of the embodiment) is 0.95, the Rayleigh limit is 313 nm, and the resolution is two points.
- the condition is that the target samples are at positions (positions on the sample surface 23) that are 50 nm apart from each other. As shown in FIG. 11, in the case of a general optical microscope, the image of the sample to be resolved is blurred and cannot be seen at all.
- the plane waves 41 and 51 of the two light waves are generated by using the light from the light source unit 30 by the plane wave illumination units 40 and 50 for standing waves.
- the sample surface 23 is illuminated with standing waves generated by causing the generated plane waves 41 and 51 of the two light waves to interfere on the sample surface 23.
- the bias plane wave illumination unit 60 causes the electric field displacement to be positioned on the sample surface 23 at a reference time that is predetermined as a time when the electric field displacement of the standing wave becomes zero at each position on the sample surface 23.
- a bias plane wave 61 that is a plane wave that vibrates with a predetermined bias amplitude (amplitude of 2A equal to a standing wave) is generated using the light from the light source unit 30 and illumination with the generated bias plane wave 61 Is performed on the sample surface 23. Therefore, in the case of only the illumination by the standing wave, the electric field distribution over the sample surface periodically appears in the form of a standing wave, whereas by applying the illumination by the bias plane wave 61, it is positive or negative on the sample surface 23.
- the electric field distribution that has been raised until it becomes just the positive side or only the negative side (that is, raised until it just does not become positive or negative) can appear periodically.
- the application range of the resolution processing can be expanded.
- the bias plane wave 61 is oscillated at the same amplitude as the standing wave in synchronization with the standing wave.
- the electric field distribution over the positive and negative sides is raised so that it is just on the positive side or only on the negative side (that is, it is raised so that it is not just over the positive and negative sides).
- the electric field distribution over the sample surface 23 is made to be slightly higher than the amount of increase in the electric field distribution just on the positive side or only on the negative side, or over the sample surface 23 by standing wave illumination.
- the electric field distribution may be slightly higher than the amount of increase that is just the positive side or only the negative side (twice the value A).
- the slightly raised amount can be achieved by setting the bias amplitude of the bias plane wave 61 to 1.9 times the value A, for example. Further, a slightly large raising amount can be achieved by setting the bias amplitude of the bias plane wave 61 to 2.1 times the value A, for example.
- the bias plane wave 61 is a time when the electric field displacement of the standing wave generated by the interference of the plane waves 41 and 51 becomes a value 0 at each position on the sample surface 23. It is assumed that the reference wave is synchronized with the standing wave so as to swing alternately on the positive side and the negative side with the same displacement regardless of the position on the sample surface 23 at the predetermined “reference time”. As the “time”, for example, the time immediately before the electric field displacement of the standing wave becomes 0 at each position on the sample surface 23, the time immediately after, or the like may be used.
- illumination by the bias plane wave 61 is performed as epi-illumination, that is, an epi-illumination type is used, but a transmission type may be used.
- a transmission type may be used.
- evanescent illumination may be used, and the microscopic observation device 12 including the illumination device 20 may be a dark-field device using a polarizer, or a bright-field device. It may be a mold type device.
- the super-resolution processing is performed using the above-described predetermined algorithm, but a super-resolution processing different from this may be performed.
- a plurality of acquired images may be combined in the frequency space domain, and the process (method) for obtaining a super-resolution observation image in the real space domain may be performed by performing inverse Fourier transform after extending the band. It is also possible to perform a process (method) for obtaining a super-resolution observation image by sequentially repeating the calculation from the acquired images.
- the reflected light wave due to the reflection of each light wave on the sample surface 23 is not particularly considered, but this is used when the influence of the reflected light wave is relatively large. It may be considered.
- the operation of the bias plane wave illumination unit 60 of the illumination device 20 is performed as follows.
- the operation of the standing wave plane wave illumination units 40 and 50 of the illumination device 20 is the same as in the embodiment.
- the electric field of each reflected light wave due to the reflection of the plane waves 41 and 51 for generating standing waves on the sample surface 23 is E1r and E2r
- the reflectivity of each of the plane waves 41 and 51 on the sample surface 23 is r1, r2, and so on.
- the phase differences of the reflected light waves from the plane waves 41 and 51 due to the reflection of the plane waves 41 and 51 on the sample surface 23 are denoted by ⁇ 1 and ⁇ 2.
- the amplitude A, wave number k, incident angle ⁇ , position x, position y, angular frequency ⁇ , and time t are the same as in the embodiment.
- the corrected electric field obtained by correcting the electric field E3 using the amplitude P and the phase correction amount ⁇ D is defined as E3a.
- the relationship of the formula (6) is established for the reflected light wave of the bias plane wave 61.
- the bias plane wave 61 has the relationship of the formula (7).
- the corrected amplitude P and the phase correction amount ⁇ D are target values as adjustment targets
- the corrected electric field E3a is a target value (waveform of the bias plane wave 61) to be finally obtained.
- the wave number k and the angular frequency ⁇ are values determined in advance based on the characteristics of the light source unit 30. On the sample surface 23, a sum electric field of the electric fields E1, E1r, E2, E2r, E3a, E3r appears.
- the corrected amplitude P is the sum of the standing wave on the sample surface 23 and all the reflected light waves (that is, the reflected light waves of the plane waves 41 and 51 and the reflected light wave of the bias plane wave 61 itself).
- an amplitude that raises the electric field displacement that is, the electric field displacement of the sum of electric fields E1, E1r, E2, E2r, and E3r
- E1, E1r, E2, E2r, and E3r just the positive side or only to the negative side (that is, until the electric field displacement does not cross positive or negative). Or those determined by analysis.
- phase correction ⁇ D is the sum of the electric field displacement of the standing wave and the electric field of all the reflected light waves on the sample surface 23 (that is, the electric field displacement of the sum of the electric fields E1, E1r, E2, E2r, and E3r).
- the electric field displacement (that is, the electric field displacement of the electric field E3a) due to the bias plane wave 61 only at the timing of the “reference time” that is predetermined as the time when the value becomes zero or substantially zero at each position on the sample surface 23 is the sample surface. 23, a value determined in advance by experiment or analysis so that the value becomes 0 regardless of the position.
- the correction of the amplitude by the corrected amplitude P can be referred to as the correction of the bias amplitude based on the electric field displacement of all the reflected light waves on the sample surface 23, and the correction of the phase by the phase correction component ⁇ D is all the reflection. It can be said that the “reference time” is corrected based on the electric field displacement on the sample surface 23 of the light wave.
- the bias plane wave illumination unit 60 performs illumination with the bias plane wave 61 having the relationship of Expression (7) on the sample surface 23.
- the adjustment PC 70 drives the polarization adjustment mechanism 62 so that the polarization plane of the incident light from the beam splitter 34 is adjusted to the polarization planes of the plane waves 41 and 51 for generating standing waves, and the bias is applied.
- the amplitude adjustment mechanism 64 is driven so that the amplitude of the plane wave 61 is adjusted to the corrected amplitude P, and the phase of the electric field E3a of the equation (7) including the phase correction ⁇ D (the y axis regardless of the position in the x axis direction).
- the phase difference adjusting mechanism 62 is driven so as to obtain an initial phase according to the position in the direction, and the incident angle fine adjusting mechanism 68 is driven so that fine adjustment is performed so that the bias plane wave 61 is incident perpendicularly to the sample surface 23.
- the bias plane wave illuminating unit 60 is based on the relationship of the equations (4) to (6) (in consideration of each reflected light wave), and the electric field of the sum of the standing wave on the sample surface 23 and all the reflected light waves.
- the corrected amplitude P for raising the displacement (that is, the electric field displacement made up of another light wave group existing on the sample surface 23) just to be no longer positive or negative, and the bias plane wave 61 only at the timing of the above-mentioned “reference time”.
- a phase correction ⁇ D that sets the electric field displacement to 0 regardless of the position on the sample surface 23 is determined in advance, and the electric field E3 is corrected using the corrected amplitude P and the phase correction ⁇ D thus determined. Illumination is performed by the bias plane wave 61 having the relationship of the expression (7) of the electric field E3a.
- the electric field distribution over the positive and negative on the sample surface 23 is increased to just the positive side or only to the negative side (that is, just the negative side).
- the electric field distribution can be made to appear periodically (increased until it is not positive or negative). This suppresses cancellation of the light wave information from the sample surface 23, and is not limited to the fluorescent sample, and super-resolution processing is applied to a general sample.
- the application range of the resolution processing can be expanded.
- Example 1 in FIG. 15 the amplitude A is 1.0, the reflectances r1 and r2 are 0.4, and the reflectance r3 is 0.2.
- the analysis shows that the corrected amplitude P may be set to the value 1.5 and the phase correction ⁇ D may be set to the value 0.
- the amplitude A is 1.0, the reflectances r1 and r2 are 0.75, the reflectance r3 is 0.55, and the phase differences ⁇ 1, ⁇ 2, and ⁇ 3 are 3 .14, the analysis shows that the corrected amplitude P is 1.1 and the phase correction ⁇ D is 0. Further, as shown as Example 3 in FIG. 15, the amplitude A is 1.0, the reflectances r1 and r2 are 0.3, the reflectance r3 is 0.2, and the phase differences ⁇ 1 and ⁇ 2 are 1.57. In the case where the phase difference ⁇ 3 is 3.14, the analysis shows that the corrected amplitude P should be 2.6 and the phase correction ⁇ D should be 0.28.
- FIG. 16 is a configuration diagram showing an outline of the configuration of the microscopic observation system 110 of the second embodiment.
- the microscopic observation apparatus 110 according to the second embodiment arbitrarily changes the polarization direction of the linearly polarized light from the sample stage 121 as a rotating stage on which the sample 122 is placed, the laser light source 132, and the laser light source 132.
- in-plane polarization polarized light perpendicular to the paper surface of FIG.
- vertical polarization a polarization beam splitter 136 that divides the reflection component, a mirror 140 that changes the direction of the vertical polarization component reflected by the polarization beam splitter 136, and a vertical polarization component from the mirror 140
- a beam splitter 142 that divides the beam into two luminous fluxes, and one of the vertically polarized components from the beam splitter 142 is irradiated onto the sample surface 123 of the sample 122
- a drive mirror 144 including a mirror 148, a mirror 144a that changes the other direction of the vertical polarization component from the beam splitter 142, and a piezo actuator 144b that drives the mirror 144a to change the phase by changing the optical path length;
- a mirror 146 that irradiates the sample surface 123 of the sample 122 with the vertically polarized component
- a driving mirror 154 including a mirror 154 a that changes the direction of the in-plane polarization component in which the light amount is adjusted, and a piezo actuator 154 b that drives the mirror 154 a to change the phase by changing the optical path length.
- a cross-spander 156 That expands the beam diameter of the in-plane polarization component of A cross-spander 156, a lens 158 for making the in-plane polarized component whose beam diameter is enlarged finally become parallel light, and a polarization beam splitter that divides the in-plane polarized light transmission component and the vertically polarized light reflection component 160, a wave plate 162 that polarizes the in-plane polarization component from the polarization beam splitter 162 into a vertical polarization component, an objective lens 164 that irradiates the sample surface 123 with the vertical polarization component from the wave plate 162, and the sample surface 123.
- an imaging lens 166 that forms an image of the scattered light of the in-plane polarization component reflected by the polarization beam splitter 160, and a cooling that detects the distribution (light distribution data) of the amount of light imaged by the imaging lens 166.
- CCD charge-coupled device
- camera 168 sample stage 121, wave plates 134 and 150, polarizing plate 152, drive mirrors 145 and 155, It comprises a computer 170 which enter the light distribution data detected performing super-resolution processing by the cooled CCD camera 168 to drive controls the retirement CCD camera 168, a.
- Laser light source 132 CW blue laser manufactured by Coherent Inc. (output power: 150 mW, wavelength: 488 nm, polarization: linear vertical (> 100: 1), beam diameter: 0.70 ⁇ 0.05 mm)
- Wave plates 134, 150, 162 Mounted Zero Order 1/2 Waveplate manufactured by Thorlabs (model number: WPH10M-488, material: Crystal Quarts, diameter: 24.0mm)
- Polarizing beam splitter 136 Solarizing Polarizing Beamsplitter Cubes (model number: PBS101, material: SF2, Tp: Ts: 1000: 1, size: 10mm x 10mm x 10mm)
- Polarizing beam splitter 160 Solarizing Polarizing Beamsplitter Cubes (model number: PBS251, material: SF2, Tp: Ts: 1000: 1, size: 25.4mm x 25.4mm x 25.4mm)
- Mirrors 140 CW blue laser manufactured by Coherent Inc. (output power: 150 mW, wavelength: 488 n
- the polarization direction of the laser light (linearly polarized light) from the laser light source 132 is determined by the wave plate 134 and is divided into the in-plane polarization component and the vertical polarization component by the polarization beam splitter 136. Is done.
- the vertically polarized component is incident on the beam splitter 142 by the mirror 140 and split, and the incident angle of one of the lights is adjusted by the mirror 148 to irradiate the sample surface 123 of the sample 122 from the outside of the objective lens 164 (right side in the figure).
- the other light is adjusted to the same incident angle from the opposite direction (left side in the figure) with respect to one light from the mirror 148 by the drive mirror 144 and the mirror 146, and the sample surface of the sample 122 from the outside of the objective lens 164 123 is irradiated. Since the two light fluxes of the light from the mirror 146 and the light from the mirror 148 are irradiated to the sample surface 123 from the opposite direction at the same incident angle with the same vertical polarization, the sample surface 123 is irradiated as a two-beam interference standing wave. Will be. The phase of this two-beam interference standing wave can be adjusted by changing the optical path length of the other light by the drive mirror 144.
- the amount of light (intensity and amplitude) of the in-plane polarization component transmitted through the polarizing beam splitter 136 is adjusted by the wave plate 150 and the polarizing plate 152, reflected by the drive mirror 155, and incident on the beam expander 156.
- the in-plane polarization component whose beam diameter has been enlarged by about 20 times by the beam expander 156 is adjusted by the lens 158 so as to be finally irradiated on the sample surface 123 as parallel light, and is incident on the polarization beam splitter 160. Because of the in-plane polarization component, all the light is transmitted through the polarization beam splitter 160 without being reflected.
- the in-plane polarization component that has passed through the polarization beam splitter 160 is polarized into a vertical polarization component by the wave plate 162, passes through the objective lens 164, and becomes parallel light and is irradiated onto the sample surface 123.
- Such epi-illumination has high coherence with the two-beam interference standing wave because the two-beam interference standing wave from the mirrors 146 and 148 is a vertical polarization component similar to the vertical polarization component as described above. That is, a three-beam interference standing wave is obtained, which is similar to the three-light wave illumination by the illumination by the plane waves 41 and 51 for generating the standing wave and the illumination by the bias plane wave 61 described in the microscopic observation system 10 of the first embodiment. Become.
- the reflected light and scattered light from the sample surface 123 due to the irradiation with the three-beam interference standing wave is not obtained by the objective lens 164 because the one derived from the two-beam interference standing wave is oblique illumination, but is reflected by the epi-illumination. What comes from the illumination passes through the objective lens 164 and is changed to an in-plane polarization component by the wave plate 162. For this reason, it is reflected by the polarization beam splitter 160, enters the imaging lens 166, and forms an image on the CCD in the cooled CCD camera 168.
- the two-beam interference standing wave is shifted on the nanometer scale by changing the optical path length by the drive mirror 144, and the phase change caused by the shift of the two-beam interference standing wave is caused.
- the phase of the three-beam interference standing wave can be shifted on the nanometer scale. Therefore, if the phase of the three-beam interference standing wave is sequentially shifted to the one wavelength (2 ⁇ ) by the shift amount on the nanometer scale, and the light distribution data is acquired by the cooling CCD camera 168 for each shift, the sample surface 123 is obtained.
- Light distribution data in which the phase of the three-beam interference standing wave is shifted by the shift amount over the entire observation range can be obtained.
- the sample 122 can be rotated by the sample stage 121, the sample 122 is placed at the center of rotation of the sample stage 121, and the phase of the three-beam interference standing wave is set to one wavelength by a shift amount on the nanometer scale.
- the cooling CCD camera 168 detects the light distribution data for each shift, and then rotates the sample 122 by 90 degrees, and again changes the phase of the three-beam interference standing wave by one nanometer scale shift amount.
- the obtained light distribution data is irradiated with a three-beam interference standing wave in a direction orthogonal to the sample surface 123. Then, the phase of the three-beam interference standing wave is sequentially shifted.
- FIG. 17 is an explanatory diagram for explaining the relationship between the phase difference ⁇ 1 and the optical path length l.
- the optical path difference l1 is expressed by the following equation (9), assuming that the incident angle to the mirror 144a is ⁇ 1.
- the phase difference ⁇ 1 at this time is expressed by the equation (10) when the wavelength is ⁇
- the moving distance d1 is expressed by the equation (11).
- the driving mirror 144 is driven to shift the phase of the other light of the two-beam interference standing wave by ⁇ 1
- the phase of the two-beam standing wave is shifted by ⁇ 1 / 2. If shifted, the phase of the three-beam interference standing wave can be shifted by ⁇ 1 / 2.
- the moving distance d1 ⁇ 172.5 ⁇ ⁇ 1 / ⁇ [nm] and d2 d1 / 2.
- the phase difference ⁇ 1 2 ⁇ / n
- the movement distance d1 345 / n [nm]
- the movement distance d1 5.75 nm.
- the microscopic observation system 110 of the second embodiment first, light distribution data acquisition control for acquiring light distribution data for each shift by irradiating the sample surface 123 with a three-beam interference standing wave whose phase is sequentially shifted is executed.
- super-resolution processing is performed to analyze the obtained light distribution data for each shift by inverse problem analysis.
- 18 is a flowchart showing an example of a light distribution data acquisition control program executed by the computer 170
- FIG. 19 is a flowchart showing an example of a super-resolution processing program executed by the computer 170
- the light distribution data acquisition control will be described, and then the super-resolution processing will be described.
- an initial position is set so that the center of the observation range of the sample surface 123 of the sample 122 is the rotation center of the sample stage 121 (step S100), and the three-beam interference standing wave is detected.
- the initial value is adjusted (step S110).
- the initial value of the three-beam interference standing wave can be adjusted by adjusting the intensity (amplitude) and phase of the epi-illumination. Specifically, such initial adjustment is performed by executing an initial adjustment program illustrated in FIG. 21 in a state where a two-beam interference standing wave is irradiated using a reference sample.
- the reference sample is preferably a line and space pattern having a periodic structure that generates moire fringes with a standing wave and a known line pitch.
- the drive mirror 154 is driven to change the phase of the epi-illumination by the phase change amount ⁇ 2 (step S300), and a light intensity image is acquired by the cooled CCD camera 168 (step S310). ), The Fourier transform image is obtained by Fourier transforming the obtained light intensity image (step S320), the total phase change amount ⁇ 2 is compared with 2 ⁇ (step S330), and step S300 is performed until the total phase change amount ⁇ 2 reaches 2 ⁇ . Repeat the process of S330.
- the process of repeating steps S300 to S330 is a process of acquiring a Fourier transform image of the light intensity image for each phase when the phase of the epi-illumination is changed by the phase change amount ⁇ 2.
- the peak when used as a reference sample, the peak is derived from a moire fringe based on a two-beam interference standing wave having a constant period, or a moire fringe based on a three-beam interference standing wave having a period twice that of the peak. Peaks can be observed.
- the total phase change amount ⁇ 2 reaches 2 ⁇ , an image in which only a peak derived from moire fringes based on a three-beam interference standing wave is observed among the acquired Fourier transform images is retrieved as a determination image (step S340). It is determined whether or not a determination image exists (step S350).
- step S370 If there is no determination image, all acquired Fourier transform images are discarded (step S370), and the wave plate 150 and the polarizing plate 152 are determined in advance.
- the incident light intensity (amplitude) is increased by a predetermined amount (step S380), and the process returns to step S300.
- the predetermined amount 1/10, 1/20, 1/30, or the like of the amplitude of the two-beam interference standing wave can be used.
- step S350 it is determined whether or not the number of detected determination images is less than the threshold (step S380), and the detected number of determination images is equal to or greater than the threshold.
- step S400 the process returns to step S300.
- value 2 or value 3 can be used as the threshold value.
- the amplitude of the epi-illumination can be adjusted to twice the amplitude of the two-beam interference standing wave, and the phase of the epi-illumination is changed to the phase of the two-beam interference standing wave. Can be synchronized. That is, it is possible to obtain a three-beam interference standing wave that is effective within the allowable range for microscopic observation.
- the scattered light intensity (light quantity) distribution (light distribution data) formed on the cooled CCD camera 168 is input (step S120), and the three-beam interference standing wave is input.
- the phase is shifted by the shift amount ⁇ (step S130), it is determined whether the total shift amount ⁇ has reached 2 ⁇ (step S140), and the processing of steps S120 to S140 is repeated until the total shift amount ⁇ reaches 2 ⁇ .
- the shift amount ⁇ for example, when n is expressed by 2 ⁇ / n, n, 10, 20, or 30, can be used.
- This is a process of moving the mirror 154a of 154 by the moving distance d2 d1 / 2 [nm]. This is because, when one phase of the two light beams of the two light beam interference standing wave (oblique illumination) forming the synchronized three light beam interference standing wave is shifted by the shift amount ⁇ , the phase of the two light beam interference standing wave is changed.
- the phase should be shifted by ⁇ / 2 in order to synchronize the bias plane wave (epi-illumination) of the third light beam with the two-beam interference standing wave whose phase is shifted.
- the electric field component E1 + E2 is a standing wave expressed by the equation (16).
- the electric field component E3 of the bias plane wave is expressed by the equation (17)
- the electric field component E1 + E2 + E3 is expressed by the equation (18).
- phase of the epi-illumination is shifted by ⁇ / 2
- D in the equation (26) is shifted by ⁇ / 2
- the standing wave shift is realized while maintaining the equal sign in the equation (27). Therefore, even if the interference of the reflected light wave as well as the interference of the incident light wave is taken into consideration, the phase of one plane wave of the oblique illumination of the three-beam interference standing wave (two-beam interference standing wave) is shifted. It is understood that the phase of the three-beam interference standing wave can be shifted while maintaining the synchronization by shifting the phase by ⁇ and shifting the phase of the epi-illumination (bias plane wave) by synchronizing with the shift amount ⁇ / 2. .
- step S150 the rotated flag F is checked (step S150).
- the rotated flag F is set to 0 as an initial value, and when the sample stage 121 is rotated 90 degrees by repeating the processes in steps S120 to S140, the value 1 is set in step S180 described later. is there.
- the rotated flag F is 0, the three-beam interference standing wave is adjusted to the initial value using the initial value adjusted in step S110 (step S160), and the sample stage 121 is rotated by 90 degrees (step S170). ), 1 is set in the rotated flag F (step S180), and the process returns to step S120.
- the process of rotating the sample stage 121 by 90 degrees and returning to step S120 performs a process of rotating the three-beam interference standing wave irradiated on the sample surface 123 by 90 degrees and shifting the phase by the shift amount ⁇ again. Because. Thereby, the three-beam interference standing wave is irradiated in two directions orthogonal to the sample surface 123, and the light distribution can be acquired by sequentially shifting the phase of the three-beam interference standing wave.
- step S150 When the sample stage 121 is rotated 90 degrees and the phase of the three-beam interference standing wave is shifted by the shift amount ⁇ to acquire the light distribution data and the total shift amount ⁇ reaches 2 ⁇ , a negative determination is made in step S150. This routine is completed.
- step S200 a process of calculating light distribution data for each shift of the estimated sample having a known structure is performed.
- Any estimated sample may be used as long as it is known. For example, an ideal structure according to the design value of the sample surface 123 is used, or uniform if the structure of the sample surface 123 is not known at all. (That is, a flat one) can be used.
- the light distribution data for each shift of the estimated sample is calculated using the shift amount ⁇ used in the light distribution data acquisition control program.
- an error between the light distribution data for each shift of the sample surface 123 and the light distribution data for each shift of the estimated sample is obtained (step S210), and the estimated sample is corrected in a direction to cancel this error, thereby creating an approximate sample. Then, it is determined whether or not the error has converged (step S230).
- the correction amount when correcting the estimated sample can be a predetermined minute amount or can be a value obtained by multiplying the magnitude of the error by a gain.
- the error is compared with a predetermined threshold value as a value that can be determined that the error has converged.
- a method for determining that the process has converged when the processes of steps S200 to S230 are repeated a predetermined number of times for example, 100 times, 1000 times, or 10,000 times. Can do. If it is determined that the error has not converged, the approximate sample is replaced with the estimated sample (step S240), and the process returns to step S200 for calculating light distribution data for each shift of the replaced estimated sample. By repeating the processes in steps S200 to S230, the approximate sample approximates the sample surface 123. If it is determined in step S230 that it has converged, the approximate sample obtained at that time is output as a solution (that is, the resolution of the sample surface 123) (step S250), and this program is terminated.
- a solution that is, the resolution of the sample surface 123
- the two-beam interference is obtained by changing the optical path length of the other light that generates the two-beam interference standing wave by the drive mirror 144 by an amount corresponding to the movement distance d1.
- the phase of the three-beam interference standing wave irradiating the sample surface 123 is shifted by the shift amount ⁇ and the light distribution data can be detected.
- the sample stage 121 is driven to rotate the sample 122 by 90 degrees, and the phase of the three-beam interference standing wave irradiated to the sample surface 123 is shifted by the shift amount ⁇ .
- the sample stage 121 is driven to rotate the sample 122 by 90 degrees, and the phase of the three-beam interference standing wave irradiated to the sample surface 123 is shifted by the shift amount ⁇ .
- the light intensity image is acquired by the cooled CCD camera 168 by changing the phase change amount ⁇ 2 until the phase of the epi-illumination reaches 2 ⁇ , and the acquired light intensity image is Fourier transformed.
- An image in which only a peak derived from moire fringes based on a three-beam interference standing wave is observed is searched as a determination image from the Fourier transform image obtained as described above, and when there is no determination image, the wave plate 150 and the polarizing plate 152 are searched.
- the wave plate 150 and the polarizing plate 152 are driven to increase the intensity (amplitude) of the epi-illumination by a predetermined amount.
- the process of reducing is repeated until the number of images for determination reaches less than the threshold, and the amplitude when the number of images for determination reaches less than the threshold is used as the initial amplitude of epi-illumination, and the image for determination is less than the threshold.
- the phase of the epi-illumination can be adjusted to twice the amplitude of the two-beam interference standing wave and the phase of the epi-illumination can be adjusted. It can be synchronized with the phase of the two-beam interference standing wave. That is, it is possible to obtain a three-beam interference standing wave that is effective within the allowable range for microscopic observation.
- a CW blue laser manufactured by Coherent Inc. is used as the laser light source 132
- a mounted Zero Order 1/2 Waveplate manufactured by Sorabo is used as the wave plates 134, 150, 162
- a Sorlab is manufactured as the polarizing beam splitter 136.
- Polarizing Beamsplitter Cubes Polarizing Beamsplitter Cubes, Polarizing Beamsplitter Cubes made by Thorlabs as a polarizing beam splitter 160, 45 ° incident multi-layered plane mirror made by Sigma Koki as mirrors 140, 144a and 154a, and aluminum plane mirror made by Sigma Koki as mirrors 146 and 148
- a non-polarization cube half mirror made by Sigma Kogyo as the beam splitter 142, a laser beam expander made by Sigma Kogyo as the beam expander 156, an objective lens made by Edmund Optics as the objective lens 164, and piezo actuators 144b and 154b.
- Physik Instrumente PZT and Physik Instrumente PZT controller cooled CCD camera 168 as a cooled CCD camera from BTTRAN, and sample stage 121 as a rotating stage made by Sigma Kogyo Co., Ltd.
- the present invention is not limited, and any device or the like may be used as long as it has the same performance or higher performance.
- the present invention can be used in the manufacturing industry of lighting devices and microscopic observation devices.
Abstract
Description
試料の顕微観察される試料面からの光の強度分布に基づいて該試料面を解像する顕微観察装置に用いられる照明方法であって、
光源部からの光から生成される二光波の平面波を斜方方向から対向するよう照射することにより得られる二光束定在波を前記試料面に照射する一方で前記光源部からの光から生成される一光波の平面波の振幅と位相を調整して得られるバイアス平面波を前記試料面に対して法線方向から照射することによって三光束定在波を前記試料面への照射する、
ことを特徴とする。
試料の顕微観察される試料面からの光の強度分布に基づいて該試料面を解像する顕微観察装置であって、
光源部と、
前記光源部からの光から生成される二光波の平面波を斜方方向から対向するよう照射することにより得られる二光束定在波を前記試料面に照射する二光束定在波照射手段と、前記光源部からの光から生成される一光波の平面波の振幅と位相を調整して得られるバイアス平面波を前記試料面に対して法線方向から照射するバイアス平面波照射部と、を有し、前記二光束定在波と前記バイアス平面波とによる三光束定在波を前記試料面に照射する照明装置と、
前記三光束定在波の照射によって反射および/または散乱する前記試料面からの光の強度分布を光分布として取得する光分布取得部と、
前記三光束定在波の位相を順次シフトするように前記照明装置を制御すると共に前記三光束定在波の位相がシフトする毎に前記光分布を取得するように前記光分布取得部を制御するシフト制御部と、
前記三光束定在波の位相がシフトする毎に取得したシフト毎の光分布に対して超解像処理を施して前記試料面を解像する解像部と、
を備えることを要旨とする。




(1)レーザ光源132:Coherent Inc.製のCWブルーレーザ(出力パワー:150mW、波長:488nm、偏光:リニア垂直(>100:1)、ビーム径:0.70±0.05mm)
(2)波長板134,150,162:ソーラボ製のMounted Zero Order 1/2 Waveplate(型番:WPH10M-488、材質:Crystal Quarts、直径:24.0mm)
(3)偏光ビームスプリッタ136:ソーラボ製のPolarizing Beamsplitter Cubes(型番:PBS101、材質:SF2、Tp:Ts:1000:1、サイズ:10mm×10mm×10mm)
(4)偏光ビームスプリッタ160:ソーラボ製のPolarizing Beamsplitter Cubes(型番:PBS251、材質:SF2、Tp:Ts:1000:1、サイズ:25.4mm×25.4mm×25.4mm)
(5)ミラー140,144a,154a:シグマ光機製の45°入射用誘多膜平面ミラー(型番:TFM-25C05-500、材質:BK7、入射角:45度±3度、直径:25mm)
(6)ミラー146,148:シグマ光機製のアルミ平面ミラー(型番:TFM-25C05-20、材質:BK7、直径:25mm)
(7)ビームスプリッタ142:シグマ光機製の無偏光キューブハーフミラー(型番:NPCH-10-4880、材質:BK7、サイズ:10mm×10mm×10mm、R:T:1:1)
(8)ビームエキスパンダ156:シグマ光機製のレーザビームエキスパンダー(型番:BE-21-V、アフォーカル倍率:×21.0、入射有効径:1.7mm)
(9)対物レンズ164:Edmund Optics製の対物レンズ(型番:BD Plan Apo SL 20×,BD Plan Apo SL 50×,BD Plan Apo SL 100×、NA:0.28,0.42,0.55、焦点距離:10mm,4mm,2mm、作動距離:30.5mm,20.0mm,13.0mm)
(10)ピエゾアクチュエータ144b,154b:Physik Instrumente製のPZT(型番:P-753.11C、閉ループ制御時の駆動距離:10μm、位置決め分解能:Closed loop:0.1nm)およびPhysik Instrumente製のPZTコントローラ(型番:E-710.4CL、サンプリングレート(サーボ):200μs/5kHz、サンプリングレート(センサ):50μs/20kHz、DAC分解能:20bit)
(11)冷却CCDカメラ168:BTTRAN製の冷却CCDカメラ(型番:BS-40、ピクセルサイズ:8.3μm×8.3μm、ピクセル数:772×580、ダイナミックレンジ:16bit、最小撮像時間:0.001s、インターフェース:USB)
(12)サンプルステージ121:シグマ光機製の回転ステージ(型番:KSP-606M、テーブル面直径:60mm、表示分解能:1度)




Claims (18)
- 試料の顕微観察される試料面からの光の強度分布に基づいて該試料面を解像する顕微観察装置に用いられる照明方法であって、
光源部からの光から生成される二光波の平面波を斜方方向から対向するよう照射することにより得られる二光束定在波を前記試料面に照射する一方で前記光源部からの光から生成される一光波の平面波の振幅と位相を調整して得られるバイアス平面波を前記試料面に対して法線方向から照射することによって三光束定在波を前記試料面への照射する、
ことを特徴とする照明方法。 - 請求項1記載の照明方法であって、
前記バイアス平面波は、位相が前記二光束定在波の電場変位が前記試料面上の各位置で値0になる程度の時期として予め定められた基準時期を境にして電場変位が前記試料面上で位置に拘わらず等しい変位をもって正側と負側とに交互に振れるように調整されており、振幅が前記試料面上に存在する他の光波群からなる電場変位を正側のみまたは負側のみとなる程度まで嵩上げするよう調整されている平面波である、
ことを特徴とする照明方法。 - 請求項1記載の照明方法であって、
前記バイアス平面波は、振幅については前記二光束定在波の振幅と同一になるように調整されていると共に位相については前記二光束定在波に同期するように調整されている、
ことを特徴とする照明方法。 - 請求項1記載の照明方法であって、
前記二光束定在波による前記試料面への照明を伴って前記バイアス平面波の位相を2πに至るまで所定量ずつシフトさせて前記試料面を照明することにより前記試料面から反射または散乱する光の強度分布であるシフト毎の光分布を取得する処理と、前記シフト毎の光分布に対してフーリエ変換して得られるフーリエ変換画像から前記二光束定在波に基づくモアレ縞に由来するピークの周期の2倍の周期となる前記三光束定在波に基づくモアレ縞に由来するピークだけが観察される判定用画像を検索する処理と、前記判定用画像が存在しないときには前記バイアス平面波の振幅を大きくする一方で前記判定用画像の数が閾値以上のときには前記バイアス平面波の振幅を小さくする処理と、からなる一連の処理を、前記判定用画像の数が前記閾値未満になるまで繰り返し実行し、前記判定用画像の数が前記閾値未満のときの振幅を前記バイアス平面波の初期振幅とすると共に前記判定用画像の数が前記閾値未満のときの該判定用画像に対応する位相を前記バイアス平面波の初期位相として調整された三光束定在波を照明する、
ことを特徴とする照明方法。 - 請求項1ないし4のうちのいずれか一つの請求項に記載の照明方法であって、
前記二光束定在波の位相と前記バイアス平面波の位相とを同期して順次シフトすることにより前記三光束定在波の位相を順次シフトする、
ことを特徴とする照明方法。 - 請求項5記載の照明方法であって、
前記二光束定在波の一方の平面波の位相を所定位相ずつ順次シフトすると共に前記バイアス平面波の位相を前記所定位相の半分ずつ順次シフトすることにより前記三光束定在波の位相を順次シフトする、
ことを特徴とする照明方法。 - 請求項6記載の照明方法であって、
前記二光束定在波の一方の平面波の光路長を所定距離ずつ順次変更すると共に前記バイアス平面波の光路長を前記所定距離の半分ずつ順次変更することにより前記三光束定在波の位相を順次シフトする、
ことを特徴とする照明方法。 - 試料の顕微観察される試料面からの光の強度分布に基づいて該試料面を解像する顕微観察装置であって、
光源部と、
前記光源部からの光から生成される二光波の平面波を斜方方向から対向するよう照射することにより得られる二光束定在波を前記試料面に照射する二光束定在波照射手段と、前記光源部からの光から生成される一光波の平面波の振幅と位相を調整して得られるバイアス平面波を前記試料面に対して法線方向から照射するバイアス平面波照射部と、を有し、前記二光束定在波と前記バイアス平面波とによる三光束定在波を前記試料面に照射する照明装置と、
前記三光束定在波の照射によって反射および/または散乱する前記試料面からの光の強度分布を光分布として取得する光分布取得部と、
前記三光束定在波の位相を順次シフトするように前記照明装置を制御すると共に前記三光束定在波の位相がシフトする毎に前記光分布を取得するように前記光分布取得部を制御するシフト制御部と、
前記三光束定在波の位相がシフトする毎に取得したシフト毎の光分布に対して超解像処理を施して前記試料面を解像する解像部と、
を備える顕微観察装置。 - 請求項8記載の顕微観察装置であって、
前記バイアス平面波照射部は、前記バイアス平面波の位相を、前記二光束定在波の電場変位が前記試料面上の各位置で値0になる程度の時期として予め定められた基準時期を境にして電場変位が前記試料面上で位置に拘わらず等しい変位をもって正側と負側とに交互に振れるように調整すると共に、前記バイアス平面波の振幅を、前記試料面上に存在する他の光波群からなる電場変位を正側のみまたは負側のみとなる程度まで嵩上げするよう調整する照射部である、
顕微観察装置。 - 請求項9記載の顕微観察装置であって、
前記二光波の平面波の各電場をE1,E2,前記バイアス平面波の電場をE3,前記二光波の平面波の各振幅をA,前記バイアス平面波の振幅を前記二光束定在波と等しい振幅,前記二光波の平面波および前記バイアス平面波の各波数をk,前記二光波の平面波の前記試料面に対する入射角をθ,前記二光波の平面波の入射面と前記試料面との交線方向の位置をx,前記試料面に対する法線方向の位置をy,角周波数をω,時間をtとしたときに、
前記二光束定在波照明部は、次式(1)および式(2)の関係を有する前記二光波の平面波を用いて照明を行なう照明部であり、
前記バイアス平面波照明部は、次式(3)の関係を有する前記バイアス平面波を用いて照明を行なう照明部である、
顕微観察装置。

- 請求項10記載の顕微観察装置であって、
前記二光波の平面波の前記試料面での反射による各反射光波の電場をE1r,E2r,前記試料面における前記二光波の平面波の各反射率をr1,r2,前記二光波の平面波の前記試料面での反射による各反射光波の前記二光波の平面波に対する位相差をδ1,δ2とすると共に、前記バイアス平面波の前記試料面での反射による反射光波の電場をE3r,前記試料面における前記バイアス平面波の反射率をr3,前記バイアス平面波の前記試料面での反射による反射光波の前記バイアス平面波に対する位相差をδ3,前記定在波と等しい振幅として前記バイアス平面波の振幅を補正したときの補正後振幅をP,前記バイアス平面波の位相を補正したときの位相補正分をΔDとしたときに、
前記バイアス平面波照明部は、次式(4)ないし(6)の関係に基づく前記補正後振幅Pと前記位相補正分ΔDとを用いて前記電場E3を補正した補正後電場E3aの式(7)の関係を有する前記バイアス平面波を用いて照明を行なう照明部である、
顕微観察装置。

- 請求項9記載の顕微観察装置であって、
前記バイアス平面波照明部は、前記二光波の平面波と前記バイアス平面波との前記試料面での各反射光波の電場変位に基づく前記基準時期および振幅を用いて照明を行なう、
顕微観察装置。 - 請求項8記載の顕微観察装置であって、
前記バイアス平面波照明部は、振幅については前記二光束定在波の振幅と同一になるように調整すると共に位相については前記二光束定在波に同期するように調整して前記バイアス平面波を照射する照射部である、
ことを特徴とする顕微観察装置。 - 請求項8記載の顕微観察装置であって、
前記二光束定在波照明部による前記二光束定在波による照明を伴って前記バイアス平面波の位相を2πに至るまで所定量ずつシフトさせて前記バイアス平面波による照明を行なうよう前記照明装置を制御するバイアス平面波位相シフト制御と、前記バイアス平面波の位相を前記所定量ずつシフトさせる毎にシフト毎の光分布を取得するよう前記光分布取得部を制御するシフト毎光分布取得制御と、前記シフト毎の光分布に対してフーリエ変換して得られるフーリエ変換画像から前記二光束定在波に基づくモアレ縞に由来するピークの周期の2倍の周期となる前記三光束定在波に基づくモアレ縞に由来するピークだけが観察される判定用画像を検索すると共に前記判定用画像が存在しないときには前記バイアス平面波の振幅を大きくする一方で前記判定用画像の数が閾値以上のときには前記バイアス平面波の振幅を小さくするよう前記照明装置を制御する振幅調整制御と、からなる3つの制御を前記判定用画像の数が前記閾値未満になるまで繰り返し実行し、前記判定用画像の数が前記閾値未満のときの振幅を前記バイアス平面波の初期振幅として設定すると共に前記判定用画像の数が前記閾値未満のときの該判定用画像に対応する位相を前記バイアス平面波の初期位相として設定する初期値設定部、
を備える顕微観察装置。 - 請求項13または14記載の顕微観察装置であって、
前記シフト制御部は、前記二光束定在波の位相と前記バイアス平面波の位相とを同期して順次シフトするよう前記照明装置を制御することにより前記三光束定在波の位相を順次シフトする制御部である、
顕微観察装置。 - 請求項15記載の顕微観察装置であって、
前記シフト制御部は、前記二光束定在波の一方の平面波の位相を所定位相ずつ順次シフトすると共に前記バイアス平面波の位相を前記所定位相の半分ずつ順次シフトするよう前記照明装置を制御することにより前記三光束定在波の位相を順次シフトする制御部である、
顕微観察装置。 - 請求項16記載の顕微観察装置であって、
前記シフト制御部は、前記二光束定在波の一方の平面波の光路長を所定距離ずつ順次変更すると共に前記バイアス平面波の光路長を前記所定距離の半分ずつ順次変更するよう前記照明装置を制御することにより前記三光束定在波の位相を順次シフトする制御部である、
顕微観察装置。 - 請求項15ないし17のいずれか1つの請求項に記載の顕微観察装置であって、
前記試料を載置すると共に前記試料面の法線方向を回転軸として前記試料を回転させる回転ステージを備え、
前記シフト制御部は、前記試料面が90度回転するよう前記回転ステージを制御すると共に、前記試料面の90度の回転の前後で前記三光束定在波の位相を順次シフトするように前記照明装置を制御すると共に前記三光束定在波の位相がシフトする毎に前記光分布を取得するように前記光分布取得部を制御する制御部である、
顕微観察装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014500972A JP6183915B2 (ja) | 2012-02-24 | 2013-02-25 | 照明方法および顕微観察装置 |
| US14/380,785 US9297991B2 (en) | 2012-02-24 | 2013-02-25 | Lighting method and microscopic observation device |
| EP13751843.7A EP2818906A4 (en) | 2012-02-24 | 2013-02-25 | ILLUMINATION METHOD AND MICROSCOPIC OBSERVATION DEVICE |
| IL234127A IL234127A (en) | 2012-02-24 | 2014-08-14 | Illumination method and microscopic viewing device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012039261 | 2012-02-24 | ||
| JP2012-039261 | 2012-02-24 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2013125723A1 true WO2013125723A1 (ja) | 2013-08-29 |
Family
ID=49005897
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2013/054821 WO2013125723A1 (ja) | 2012-02-24 | 2013-02-25 | 照明方法および顕微観察装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9297991B2 (ja) |
| EP (1) | EP2818906A4 (ja) |
| JP (1) | JP6183915B2 (ja) |
| IL (1) | IL234127A (ja) |
| WO (1) | WO2013125723A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020085402A1 (ja) * | 2018-10-23 | 2020-04-30 | 国立大学法人東京大学 | 顕微鏡及び顕微法 |
| JP2020118533A (ja) * | 2019-01-23 | 2020-08-06 | 国立大学法人福井大学 | 計測対象物の面外変位分布や3次元形状を計測する方法とその装置 |
| JP2021529991A (ja) * | 2018-07-03 | 2021-11-04 | ザ ユナイテッド ステイツ オブ アメリカ, アズ リプレゼンテッド バイ ザ セクレタリー, デパートメント オブ ヘルス アンド ヒューマン サービシーズ | フォトスイッチング及び定在波照明技術を用いた顕微鏡における改善された軸分解能のためのシステム及び方法 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150120796A1 (en) * | 2015-01-09 | 2015-04-30 | Seth John Winnipeg | Standing wave simple math processor |
| US20170023628A1 (en) * | 2015-07-20 | 2017-01-26 | Tektronix, Inc. | Time corrected time-domain reflectometer |
| US11105746B2 (en) * | 2016-07-20 | 2021-08-31 | Technion Research & Development Foundation Ltd. | Multi moire structured illumination microscopy with high index materials |
| KR102605494B1 (ko) * | 2016-10-13 | 2023-11-24 | 라이프 테크놀로지스 홀딩스 프리베이트 리미티드 | 오브젝트 조명 및 이미징을 위한 디바이스, 시스템 및 방법 |
| WO2019120561A1 (en) * | 2017-12-22 | 2019-06-27 | European Space Agency | Wave front reconstruction for dielectric coatings at arbitrary wavelength |
| KR102028864B1 (ko) * | 2019-05-07 | 2019-11-04 | 연세대학교 산학협력단 | 광원 위치를 보정하기 위한 현미경 장치 및 그 방법 |
| CN116736532B (zh) * | 2023-08-01 | 2023-10-20 | 中国科学院长春光学精密机械与物理研究所 | 贝塞尔双光子显微镜照明光路非共轭像差校正方法及系统 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08313433A (ja) * | 1995-05-17 | 1996-11-29 | Satoshi Kawada | 赤外顕微分光分析方法及び装置 |
| JP2005322754A (ja) * | 2004-05-07 | 2005-11-17 | Canon Inc | 反射型マスクの検査方法 |
| JP2007225563A (ja) | 2006-02-27 | 2007-09-06 | Univ Of Tokyo | 高解像検出装置及び方法 |
| JP2011106974A (ja) * | 2009-11-18 | 2011-06-02 | Hitachi High-Technologies Corp | 欠陥検出方法及び欠陥検出装置並びにこれを備えた欠陥観察装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19830596B4 (de) * | 1997-07-10 | 2008-08-21 | Ruprecht-Karls-Universität Heidelberg | Wellenfeldmikroskop, Wellenfeldmikroskopieverfahren, auch zur DNA-Sequenzierung, und Kalibrierverfahren für die Wellenfeldmikroskopie |
| US6020988A (en) * | 1997-08-05 | 2000-02-01 | Science Research Laboratory, Inc. | Ultra high resolution wave focusing method and apparatus and systems employing such method and apparatus |
| WO2013011680A1 (ja) * | 2011-07-15 | 2013-01-24 | 株式会社ニコン | 構造化照明装置、構造化照明顕微鏡、構造化照明方法 |
| US9170411B2 (en) * | 2013-10-11 | 2015-10-27 | Panasonic Intellectual Property Management Co., Ltd. | Scanning optical microscope |
-
2013
- 2013-02-25 US US14/380,785 patent/US9297991B2/en not_active Expired - Fee Related
- 2013-02-25 EP EP13751843.7A patent/EP2818906A4/en not_active Withdrawn
- 2013-02-25 JP JP2014500972A patent/JP6183915B2/ja not_active Expired - Fee Related
- 2013-02-25 WO PCT/JP2013/054821 patent/WO2013125723A1/ja active Application Filing
-
2014
- 2014-08-14 IL IL234127A patent/IL234127A/en not_active IP Right Cessation
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08313433A (ja) * | 1995-05-17 | 1996-11-29 | Satoshi Kawada | 赤外顕微分光分析方法及び装置 |
| JP2005322754A (ja) * | 2004-05-07 | 2005-11-17 | Canon Inc | 反射型マスクの検査方法 |
| JP2007225563A (ja) | 2006-02-27 | 2007-09-06 | Univ Of Tokyo | 高解像検出装置及び方法 |
| JP2011106974A (ja) * | 2009-11-18 | 2011-06-02 | Hitachi High-Technologies Corp | 欠陥検出方法及び欠陥検出装置並びにこれを備えた欠陥観察装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2818906A4 * |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021529991A (ja) * | 2018-07-03 | 2021-11-04 | ザ ユナイテッド ステイツ オブ アメリカ, アズ リプレゼンテッド バイ ザ セクレタリー, デパートメント オブ ヘルス アンド ヒューマン サービシーズ | フォトスイッチング及び定在波照明技術を用いた顕微鏡における改善された軸分解能のためのシステム及び方法 |
| WO2020085402A1 (ja) * | 2018-10-23 | 2020-04-30 | 国立大学法人東京大学 | 顕微鏡及び顕微法 |
| JP2020118533A (ja) * | 2019-01-23 | 2020-08-06 | 国立大学法人福井大学 | 計測対象物の面外変位分布や3次元形状を計測する方法とその装置 |
| JP7215719B2 (ja) | 2019-01-23 | 2023-01-31 | 国立大学法人福井大学 | 計測対象物の面外変位分布や3次元形状を計測する方法とその装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6183915B2 (ja) | 2017-08-23 |
| US9297991B2 (en) | 2016-03-29 |
| EP2818906A1 (en) | 2014-12-31 |
| JPWO2013125723A1 (ja) | 2015-07-30 |
| EP2818906A4 (en) | 2015-11-18 |
| US20150043049A1 (en) | 2015-02-12 |
| IL234127A (en) | 2016-08-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6183915B2 (ja) | 照明方法および顕微観察装置 | |
| JP6033798B2 (ja) | 蛍光顕微鏡検査法における照明位相制御のためのシステムおよび方法 | |
| EP2724361B1 (en) | Illumination control | |
| EP1873481B1 (en) | Oblique incidence interferometer | |
| JP5954979B2 (ja) | 多波長干渉計を有する計測装置 | |
| CN112859542A (zh) | 成像计量工具中的光学系统及成像叠加计量工具中的光学系统 | |
| TW201730622A (zh) | 物鏡系統 | |
| CN114502912B (zh) | 混合式3d检验系统 | |
| JP5085608B2 (ja) | 空間光変調器を用いた広視野超解像光学顕微鏡 | |
| JP2008292939A (ja) | 定量位相顕微鏡 | |
| TW202113459A (zh) | 在對準中用以減小標記尺寸的相位調變器 | |
| JP2008225380A (ja) | 位相制御光学系、該光学系を備えたレーザ照射装置、及びレーザ照射方法 | |
| JP5354675B2 (ja) | 変位分布計測方法、装置及びプログラム | |
| JP4427632B2 (ja) | 高精度三次元形状測定装置 | |
| US9097518B2 (en) | Method for determining roughness data and/or topography data of surfaces in material microscopy | |
| JP4542108B2 (ja) | セグメントグレーティングアライメント装置 | |
| JP7326292B2 (ja) | 基板上のターゲット構造の位置を決定するための装置及び方法 | |
| JP2014106222A (ja) | 干渉測定装置、波面収差測定装置、形状測定装置、露光装置、干渉測定方法、投影光学系の製造方法、及び露光装置の製造方法 | |
| TW202129222A (zh) | 混合式3d檢測系統 | |
| JP2012145554A (ja) | シアリング干渉測定装置 | |
| KR101085061B1 (ko) | 고속카메라와 연속위상주사 방법을 이용한 진동둔감 간섭계 | |
| JP2005249576A (ja) | 干渉測定方法及び干渉計 | |
| WO2017030194A1 (ja) | 観察システム | |
| CN112731344A (zh) | 具有主动光学防抖功能的放大型面阵扫频测距/厚的装置和方法 | |
| JPS61202102A (ja) | 光波干渉顕微鏡 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 13751843 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 234127 Country of ref document: IL |
|
| ENP | Entry into the national phase |
Ref document number: 2014500972 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2013751843 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14380785 Country of ref document: US |