WO2011040245A1 - ウィンドレギュレータ装置 - Google Patents
ウィンドレギュレータ装置 Download PDFInfo
- Publication number
- WO2011040245A1 WO2011040245A1 PCT/JP2010/065970 JP2010065970W WO2011040245A1 WO 2011040245 A1 WO2011040245 A1 WO 2011040245A1 JP 2010065970 W JP2010065970 W JP 2010065970W WO 2011040245 A1 WO2011040245 A1 WO 2011040245A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- gear
- window glass
- operating lever
- output shaft
- lever
- Prior art date
Links
- 238000001514 detection method Methods 0.000 claims abstract description 223
- 239000005357 flat glass Substances 0.000 claims description 185
- 230000005540 biological transmission Effects 0.000 claims description 33
- 230000007246 mechanism Effects 0.000 claims description 24
- 230000033001 locomotion Effects 0.000 claims description 4
- 239000011521 glass Substances 0.000 claims description 3
- 230000002441 reversible effect Effects 0.000 description 67
- 239000000758 substrate Substances 0.000 description 20
- 238000000034 method Methods 0.000 description 18
- 230000008569 process Effects 0.000 description 18
- 230000002093 peripheral effect Effects 0.000 description 17
- 238000010586 diagram Methods 0.000 description 10
- 230000002829 reductive effect Effects 0.000 description 7
- 239000003990 capacitor Substances 0.000 description 5
- 230000008859 change Effects 0.000 description 5
- 238000005192 partition Methods 0.000 description 5
- 230000006866 deterioration Effects 0.000 description 4
- 230000007935 neutral effect Effects 0.000 description 4
- 230000036961 partial effect Effects 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 230000000452 restraining effect Effects 0.000 description 3
- 238000003860 storage Methods 0.000 description 3
- 239000004020 conductor Substances 0.000 description 2
- 239000004519 grease Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000002265 prevention Effects 0.000 description 2
- 230000001105 regulatory effect Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 239000000314 lubricant Substances 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images





Classifications
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F11/00—Man-operated mechanisms for operating wings, including those which also operate the fastening
- E05F11/38—Man-operated mechanisms for operating wings, including those which also operate the fastening for sliding windows, e.g. vehicle windows, to be opened or closed by vertical movement
- E05F11/44—Man-operated mechanisms for operating wings, including those which also operate the fastening for sliding windows, e.g. vehicle windows, to be opened or closed by vertical movement operated by one or more lifting arms
- E05F11/445—Man-operated mechanisms for operating wings, including those which also operate the fastening for sliding windows, e.g. vehicle windows, to be opened or closed by vertical movement operated by one or more lifting arms for vehicle windows
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/40—Safety devices, e.g. detection of obstructions or end positions
- E05F15/41—Detection by monitoring transmitted force or torque; Safety couplings with activation dependent upon torque or force, e.g. slip couplings
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/60—Power-operated mechanisms for wings using electrical actuators
- E05F15/603—Power-operated mechanisms for wings using electrical actuators using rotary electromotors
- E05F15/665—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for vertically-sliding wings
- E05F15/689—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for vertically-sliding wings specially adapted for vehicle windows
- E05F15/695—Control circuits therefor
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/60—Power-operated mechanisms for wings using electrical actuators
- E05F15/603—Power-operated mechanisms for wings using electrical actuators using rotary electromotors
- E05F15/665—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for vertically-sliding wings
- E05F15/689—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for vertically-sliding wings specially adapted for vehicle windows
- E05F15/697—Motor units therefor, e.g. geared motors
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/70—Power-operated mechanisms for wings with automatic actuation
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2400/00—Electronic control; Electrical power; Power supply; Power or signal transmission; User interfaces
- E05Y2400/10—Electronic control
- E05Y2400/32—Position control, detection or monitoring
- E05Y2400/35—Position control, detection or monitoring related to specific positions
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2400/00—Electronic control; Electrical power; Power supply; Power or signal transmission; User interfaces
- E05Y2400/10—Electronic control
- E05Y2400/50—Fault detection
- E05Y2400/51—Fault detection of position, of back drive
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2900/00—Application of doors, windows, wings or fittings thereof
- E05Y2900/50—Application of doors, windows, wings or fittings thereof for vehicles
- E05Y2900/53—Type of wing
- E05Y2900/55—Windows
Definitions
- the present invention relates to a window regulator device that automatically opens and closes a window glass of a vehicle by power generated by a power source such as an electric motor.
- a window regulator device including an opening / closing position detecting unit that detects whether an opening / closing position of a window glass is a position belonging to a predetermined specific position region.
- window glass attached to vehicle side windows and roof windows has been manually opened and closed, but to date, most vehicle window glasses are automatically opened and closed by the power generated by power sources such as electric motors. Is done.
- power sources such as electric motors.
- the window glass is automatically closed, there is a possibility that foreign matter may be sandwiched between the window glass and the window frame.
- a window regulator device having a pinching processing function for stopping pinching by stopping the window glass closing operation (closing operation) or reversing the window glass operating direction when foreign object pinching is detected. has already been developed.
- a foreign object is usually detected by an increase in load applied from the window glass side to the power source side or a decrease in the operating speed of the window glass.
- foreign object pinching is often misdetected.
- the open / close position of the window glass provided on the side window of the vehicle is closed to the fully closed position, the upper edge of the window glass contacts the inner bottom wall of the weather strip provided on the window frame and the window frame It can happen that a weatherstrip is sandwiched between the window glass.
- the load increases due to the sandwiching of the weather strip or the operating speed of the window glass decreases, the trapping is erroneously detected even though no foreign matter is sandwiched.
- Japanese Patent Laid-Open No. 11-101058 discloses a cam member formed on the inner peripheral side of a pinion gear connected to an output shaft of an electric motor via a clutch mechanism, and a contact disposed so as to be in contact with the cam member.
- a window regulator device electric window opening and closing device
- a rotating member in which a cam member for detecting whether the opening / closing position of the window glass is in the dead zone region is connected to the output shaft. It is formed on the inner peripheral side.
- this pinion gear is disposed adjacent to the drive gear in the housing, so that the space limitation is large. Therefore, the pinion gear is a small member.
- the cam formed in the inner peripheral side of this pinion gear is also a small member.
- the detection accuracy may be greatly deteriorated due to a slight assembly error. Further, when the shape of the cam member and the mounting angle of the pinion gear are strictly managed to prevent the detection accuracy from deteriorating, the manufacturing cost and the assembling cost increase.
- the present invention has been made to solve the above problem, and in a window regulator device comprising an opening / closing position detecting means for detecting whether an opening / closing position of a window glass is a position belonging to a specific position region such as a dead zone region.
- An object of the present invention is to provide a window regulator device in which deterioration of the detection accuracy of the opening / closing position detected by the opening / closing position detecting means is suppressed.
- the present invention provides a power source, an output shaft connected to the power source and rotated by power generated by the power source, and rotation of the output shaft so that a vehicle window glass is opened and closed by a rotational driving force of the output shaft.
- a window comprising a driving force transmission mechanism for transmitting a driving force to the window glass, and an opening / closing position detecting means for detecting whether or not the opening / closing position of the window glass belongs to a specific position area that is a predetermined opening / closing position area.
- a regulator device is disclosed.
- the opening / closing position detecting means does not engage with the rotating member that rotates by the rotational driving force of the output shaft and the window member when the opening / closing position of the window glass does not belong to the specific position region.
- An operating lever that engages with the rotating member when the opening / closing position is a position belonging to the specific position region, and that is rotated by a rotational driving force of the output shaft that is transmitted through the rotating member when engaged;
- a specific position region detection switch that switches based on the rotation of the operation lever.
- the rotation of the output shaft rotated by the power of the power source is transmitted to the window glass via the driving force transmission mechanism.
- the window glass opens and closes as the output shaft rotates.
- the rotating member is rotated by the rotational driving force of the output shaft.
- the rotating member engages with the operating lever when the opening / closing position of the window glass is a position belonging to a predetermined specific position region.
- the operating lever and the rotating member are engaged, the operating lever is rotated by the rotational driving force of the output shaft transmitted through the rotating member.
- the specific position area detection switch is switched based on the rotation of the operating lever. Therefore, whether or not the opening / closing position of the window glass belongs to the specific position area is detected based on the switching state of the specific position area detection switch.
- the operating lever is used as a detection member for detecting whether the opening / closing position of the window glass is a position belonging to the specific position region.
- This operating lever is a separate member from the rotating member, and the operating stroke can be increased without being affected by the size of the rotating member. Since the operation stroke can be increased, even if there is a slight shift in the arrangement of the operation lever and the specific position area detection switch, the detection error in the specific position area based on the shift can be reduced. . Therefore, the deterioration of detection accuracy can be sufficiently suppressed without strictly managing the assembly accuracy.
- an electric motor is generally used as the “power source”.
- any power source may be used as long as it can apply rotational torque to the output shaft.
- the “specific position area” is preferably the above-described dead zone area, but is not limited thereto.
- the specific position region may be a region where it is desired to avoid stopping or reversing the closing operation of the window glass even when pinching is detected, or a region arbitrarily set based on a desired request.
- the “specific position area detection switch” may be any type of switch as long as it is a switch that is switched based on the rotation of the operation lever.
- a contact switch having a substrate, a conductive portion formed on the substrate, and a movable piece whose base end is connected to a part of the conductive portion and whose tip is separated from the substrate can be used as the specific position region detection switch.
- the switch switching state is ON (or
- the switch switching state is OFF (or ON).
- a switch may be arranged with respect to the operating lever.
- the window regulator device of the present invention may or may not include an ECU that outputs a command signal for executing the sandwiching process based on the switching state of the specific position area detection switch.
- the sandwiching process is executed based on a command signal output from the ECU.
- the specific position area detection switch itself is incorporated in a drive circuit for driving a power source such as an electric motor, and the power source is switched according to the switching state of the switch. If the energization / non-energization state is switched or the energization direction to the power source is switched, the sandwiching process can be executed. According to this, since the sandwiching process can be executed without using the ECU, the window regulator device with the sandwiching process function can be manufactured at a lower cost.
- the rotating member meshes with the first gear supported by the output shaft so as to be rotatable integrally with the output shaft, decelerates the rotation of the first gear, and is engageable with the operating lever.
- a second gear mounted with an engagement member, and the engagement member does not engage with the operating lever when the opening / closing position of the window glass is a position not belonging to the specific position region; It is good to arrange
- the actuating lever may be rotated by a rotational driving force of the output shaft transmitted through the second gear when engaged with the engaging portion.
- the first gear rotates as the output shaft rotates.
- the second gear meshed with the first gear rotates at a reduced speed in a direction opposite to the rotation direction of the first gear.
- the engaging member attached to the second gear also rotates.
- the engaging member engages with the operating lever when the opening / closing position of the window glass is a position belonging to the specific position region.
- the operating lever is rotated by the rotational driving force of the output shaft.
- the specific position area detection switch is switched based on the rotation of the operating lever.
- the “engagement member” may be formed integrally with the second gear, or may be formed separately from the second gear and then attached to the second gear. In consideration of the manufacturing cost, the engaging member is preferably formed integrally with the second gear and constitutes a part of the second gear. Moreover, the engaging member is good to be provided in the end surface part of the 2nd gearwheel.
- the operating lever is supported by the output shaft so as to be relatively rotatable and is connected to the second gear via a connecting pin.
- the operating lever is supported by the output shaft so as to be relatively rotatable, and preferably supports the second gear via the connecting pin so as to be rotatable.
- the actuating lever may be connected to the second gear supported by the output shaft so as to be relatively rotatable and connected to the connecting pin via the connecting pin.
- the engagement stops the rotation of the second gear relative to the operating lever.
- the second gear revolves around the first gear in the same direction as the rotation direction of the first gear by meshing with the first gear.
- the operating lever connected to the second gear by the connecting pin rotates about the output shaft (first gear) in the same direction as the rotating direction of the first gear. That is, when the engaging portion formed on the second gear engages with the operating lever, the rotation of the second gear stops, and the second gear and the operating lever generate the driving force of the first gear due to the coupling by the connecting pin. Receiving and rotating integrally. In this way, the operating lever reliably rotates with the revolution of the second gear.
- the open / close position detecting means is configured to bias the actuating lever in one rotational direction, and restrict the rotation of the actuating lever by the biasing force of the biasing member to thereby rotate the actuating lever.
- a positioning member for positioning the head According to this, the operation lever is positioned at a desired position by the urging of the operation lever by the urging member and the rotation restriction of the operation lever by the positioning member.
- the actuating lever has a tooth portion, and the rotating member is supported by a first gear supported to be rotatable integrally with the output shaft and a support pin so as to be meshed with the first gear.
- a second gear that decelerates the rotation of the first gear and a tooth portion that is supported by the support pin so as to rotate integrally with the second gear and that can mesh with the tooth portion of the operating lever are formed on a part of the outer periphery. It is good to have the 3rd gearwheel made.
- the tooth portion formed on the third gear does not mesh with the tooth portion formed on the operating lever when the opening / closing position of the window glass is a position that does not belong to the specific position region, and the opening / closing position of the window glass Is a position that meshes with a tooth portion formed on the actuating lever when the position belongs to the specific position region.
- the actuating lever is rotated by the rotational driving force of the output shaft transmitted through the third gear when the tooth portion meshes with the tooth portion formed on the third gear.
- the open / close position detecting means further includes an elastic member for elastically positioning the rotation position of the operating lever, and the operating lever is driven by the rotational driving force of the output shaft when meshed with the third gear.
- the elastic member may be rotated against the elastic force generated by the elastic member.
- the first gear rotates as the output shaft rotates.
- the second gear meshing with the first gear rotates at a reduced speed.
- the third gear supported by the support pin so as to rotate integrally with the second gear also rotates.
- the teeth formed on the third gear also rotate.
- the tooth portion formed on the third gear meshes with the tooth portion formed on the operating lever when the opening / closing position of the window glass is a position belonging to the specific position region.
- the third gear and the operating lever are engaged, and the rotational driving force of the output shaft is transmitted to the operating lever.
- the operating lever rotates against the elastic force generated by the elastic member that positions the operating lever.
- the specific position area detection switch is switched based on the rotation of the operation lever. In this way, by configuring the open / close position detecting means so that the operating lever is rotated by meshing with the third gear, the operating lever is reliably rotated.
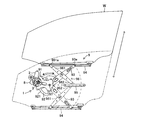
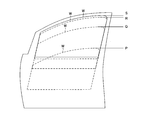
- FIG. 1 is a front view showing the overall configuration of the window regulator device.
- FIG. 2 is a graph showing the relationship between the magnitude of the moment acting on the output shaft 3 and the rotational position of the lift arm when the window glass is closed from the fully open position to the fully closed position.
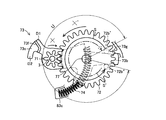
- FIG. 3 is an exploded perspective view of the drive mechanism according to the first embodiment.
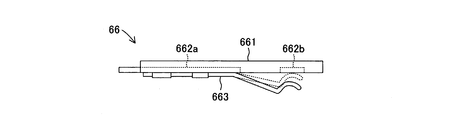
- FIG. 4 is a schematic side view of the pinching detection switch.
- FIG. 7 is a front view of the operating lever according to the first embodiment.
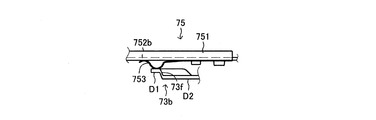
- FIG. 8 is a schematic side view of the dead zone detection switch.
- FIG. 9 is a schematic side view of the reverse operation region detection switch.
- FIG. 10 is a schematic side view showing an operating state of the worm wheel and the pinching detection plate when no foreign object is pinched.
- FIG. 11 is a front view of the pinching detection unit representing an operating state when the driving force transmission spring is compressed.
- FIG. 12 is a schematic side view showing a state in which the protrusions formed on the worm wheel and the pinching detection plate interfere with each other.
- FIG. 13 is a schematic diagram showing the opening / closing position of the window glass.
- FIG. 14 is a front view showing the positional relationship between the first gear, the second gear, and the operating lever.
- FIG. 15 is a partial side schematic view showing the contact state between the dead zone detection switch and the operating lever when the opening / closing position of the window glass is a position that does not belong to the dead zone.
- FIG. 11 is a schematic side view showing an operating state of the worm wheel and the pinching detection plate when no foreign object is pinched.
- FIG. 11 is a front view of the pinching detection unit representing an operating
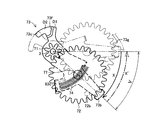
- FIG. 16 is a front view illustrating an arrangement relationship of the first gear, the second gear, and the operation lever when the operation lever is rotated.
- FIG. 17 is a partial side schematic view showing a contact state between the dead zone detection switch and the operating lever when the opening / closing position of the window glass is a position belonging to the dead zone.
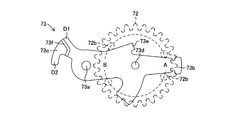
- FIG. 18A is a front view illustrating an arrangement relationship between the cam and the reverse operation region detection switch when the opening / closing position of the window glass is the fully open position.
- 18B is a view in the direction of arrow A in FIG. 18A.
- FIG. 19A is a front view illustrating an arrangement relationship between the cam and the reverse operation region detection switch when the opening / closing position of the window glass is the reverse operation start position.
- FIG. 19B is a view in the direction of arrow B in FIG. 19A.
- FIG. 20A is a front view showing an arrangement relationship between the cam and the reverse operation detection switch when the opening / closing position of the window glass is the dead zone start position.
- 20B is a view in the direction of the arrow C in FIG. 20A.
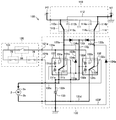
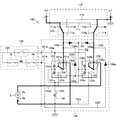
- FIG. 21 is a circuit diagram showing a drive circuit for energizing the electric motor.
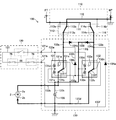
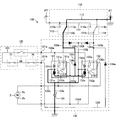
- FIG. 22 is a circuit diagram of a drive circuit showing a power supply path to the electric motor when the operation switch is operated so as to close the window.
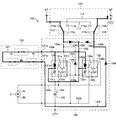
- FIG. 23 is a circuit diagram of a drive circuit showing a power supply path to the electric motor when the operating device switch is operated so that the window is opened.
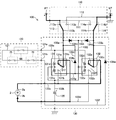
- FIG. 24 is a circuit diagram of a drive circuit showing an energization path for switching between the first latching relay and the second latching relay when pinching is detected.
- FIG. 25 is a circuit diagram of a drive circuit showing a power supply path to the electric motor during the sandwiching process.
- FIG. 26 is a circuit diagram of a drive circuit showing a power supply path to the electric motor during the sandwiching process.
- FIG. 27 is a circuit diagram of the drive circuit showing the discharge path of the charge charged in the capacitor.
- FIG. 28 is an exploded perspective view of the drive mechanism of the window regulator device according to the second embodiment.
- FIG. 29 is a front view of the operating lever according to the second embodiment.
- FIG. 30 is a front view illustrating an arrangement relationship between the lever driving gear and the operating lever when the opening / closing position of the window glass is the fully open position.
- FIG. 31 is a side view showing a contact state between the operating lever and the dead zone detection switch when the operating lever according to the second embodiment is not rotating.
- FIG. 32 is a front view showing an arrangement relationship between the lever driving gear and the operating lever when the opening / closing position of the window glass is the dead zone start position.
- FIG. 33 is a front view illustrating an arrangement relationship between the lever driving gear and the operating lever when the operating lever according to the second embodiment is rotated.
- FIG. 34 is a side view illustrating a contact state between the operating lever and the dead zone detection switch when the operating lever according to the second embodiment is rotated.
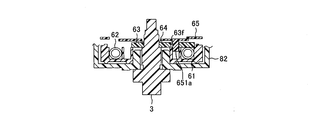
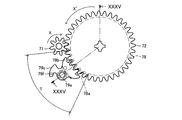
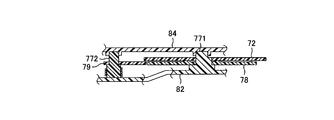
- 35 is a sectional view taken along XXXV-XXXV in FIG.
- FIG. 1 is a front view showing the overall configuration of the window regulator device according to the present embodiment.
- This window regulator device opens and closes a window glass provided on a side window of a vehicle.
- the window regulator device includes a driving mechanism 1 and a driving force transmission mechanism 9.
- the drive mechanism 1 includes an electric motor 2 as a power source for opening and closing the window glass, an output shaft 3, a housing 8 connected to the electric motor 2, and a detection unit (not shown) housed in the housing 8. .
- the electric motor 2 is electrically connected to a power source such as an in-vehicle battery, and generates a rotational driving force by supplying power from the power source.
- the output shaft 3 is rotated by the rotational driving force generated by the electric motor 2.
- the driving force transmission mechanism 9 transmits the rotational driving force of the output shaft 3 to the window glass W so that the window glass W is opened and closed by the rotational driving force of the output shaft 3 in the vertical direction indicated by the arrows in the figure.
- the detection unit housed in the housing 8 whether or not a foreign object is caught between the window glass W and the window frame during the closing operation of the window glass W, and the opening / closing position of the window glass W are determined in advance. It is detected whether or not the position belongs to a specific opening / closing position area (specific position area).
- the driving force transmission mechanism 9 includes a fixed bracket 91, a sector gear 92, a lift arm 93, a first guide rail member 94, a second guide rail member 95, and an equalizer arm 96.
- the fixing bracket 91 is fixed to the door panel of the vehicle and supports the housing 8.
- the sector gear 92 includes an arcuate tooth portion 921 as shown in the figure, and is connected to the pin 97 at a center of the arc of the tooth portion 921 so as to be rotatable.
- the lift arm 93 is a long member that is tapered toward the tip.
- the lift arm 93 is fixed to the rotation center position of the sector gear 92 on the base end side. Accordingly, when the sector gear 92 rotates around the axis of the pin 97, the lift arm 93 also rotates in the same direction around the pin 97.
- a shoe 93 a is connected to the tip of the lift arm 93.
- the first guide rail member 94 is fixed almost horizontally to the lower part of the window glass W.
- a guide groove is formed in the first guide rail member 94 along its longitudinal direction.
- a shoe 93a is slidably disposed in the guide groove.
- the second guide rail member 95 is fixed to the door panel.
- a guide groove is also formed in the second guide rail member 95 along its longitudinal direction.
- the equalizer arm 96 includes a first arm 961 and a second arm 962.
- the first arm 961 and the second arm 962 are both long members. The base end sides of both arms are coupled in the vicinity of the approximate center of the lift arm 93.
- the first arm 961 and the second arm 962 are linearly fixed so as to have the same axis when viewed from the direction of the figure, and can be rotated around the center of the lift arm 93.
- a shoe 961 a is connected to the tip of the first arm 961.
- the shoe 961 a is slidably disposed in the guide groove of the first guide rail member 94.
- a shoe is also connected to the tip of the second arm 962, and this shoe is slidably disposed in the guide groove of the second guide rail member 95. Therefore, the tip of the lift arm 93 and the tip of the first arm 961 are inserted into the guide groove of the first guide rail member 94, and the tip of the second arm 962 is inserted into the guide groove of the second guide rail member 95 via the shoe. Connected. Also, the arm dimensions are adjusted so that the first guide rail member 94 and the second guide rail member 95 are arranged in parallel.
- the output shaft 3 is rotatably supported by the housing 8.
- the output shaft 3 is rotated by the rotational driving force of the electric motor 2.
- an output gear portion is formed on the output shaft 3, and this output gear portion meshes with a tooth portion 921 of the sector gear 92.
- the equalizer arm 96 rotates so as to maintain the structural arrangement relationship between the lift arm 93, the first guide rail member 94, and the second guide rail member 95. Therefore, the first guide rail member 94 rises while maintaining a parallel state with the second guide rail member 95 when the window glass W is closed.
- the sector gear 92 rotates clockwise about the pin 97.
- the lift arm 93 also rotates clockwise about the pin 97. Accordingly, the shoe 93a slides in the guide groove of the first guide rail member 94 and the first guide rail member 94 moves downward.
- the window glass W also moves downward, and the window glass W operates in the opening direction (opening operation).
- the equalizer arm 96 rotates so as to maintain the structural arrangement relationship between the lift arm 93, the first guide rail member 94, and the second guide rail member 95.
- the first guide rail member 94 descends while maintaining the parallel state with the second guide rail member 95 when the window glass is opened. In this way, the window glass W is opened and closed.
- the open / close position of the window glass W indicated by a solid line is a fully closed position
- the open / close position of the window glass W indicated by a two-dot chain line is a fully open position.
- FIG. 2 shows the relationship between the magnitude of the moment acting on the output shaft 3 and the rotational position of the lift arm 93 when the window glass W is closed from the fully open position (lower limit position) to the fully closed position (upper limit position). It is a graph. As can be seen from this graph, the moment is maximum when the rotational position of the lift arm 93 is a horizontal position orthogonal to the direction of gravity. The moment decreases as the rotational position of the lift arm 93 moves from the horizontal position to the upper limit position (fully closed position of the window glass W) or lower limit position (fully opened position of the window glass).
- FIG. 3 is an exploded perspective view of the drive mechanism 1.
- the drive mechanism 1 includes an electric motor 2, an output shaft 3, a detection unit 5, and a housing 8.
- the electric motor 2 is connected to the housing 8 by fastening means (not shown).
- the housing 8 includes a first housing 81, a second housing 82, a third housing 83, and a lid 84.
- the first housing 81 is formed in a cylindrical shape that is long in the axial direction, and houses a worm (not shown) connected to the motor shaft of the electric motor 2. This worm rotates coaxially with the motor shaft.
- the second housing 82 is adjacent to the side periphery of the first housing 81, is formed in a cylindrical shape having an axis orthogonal to the cylindrical axis of the first housing 81, and the upper end side is open.
- the internal space of the first housing 81 and the internal space of the second housing 82 communicate with each other at adjacent portions of both housings.
- the third housing 83 is disposed and formed above the second housing 82.
- the third housing 83 has a bottom surface 83a that extends substantially horizontally to the right in the drawing from the upper end opening edge of the second housing 82, and a side wall 83b that stands from the periphery of the bottom surface 83a. Therefore, as can be seen from the figure, a circular space S that is recessed from the bottom surface 83 a of the third housing 83 is a space in the second housing 82.
- the upper end of the third housing 83 is open, and this opening is closed by the lid 84.
- the lid 84 is fixed to the third housing 83 by fastening means (not shown).
- a retaining spring accommodating partition wall 83c for accommodating a retaining spring 74 described later is formed in an arc shape along the space S.
- a cylindrical boss 82a is formed at the center of the bottom surface of the second housing 82.
- the output shaft 3 is inserted through the circular hole in the boss 82a.
- the output shaft 3 enters the internal space of the second housing 82 and the third housing 83.
- the output shaft 3 has a distal end portion 31 and a proximal end portion 32, and an output gear portion 33, a shaft portion 34, and an engaging portion 35 are formed in this order from the proximal end portion 32 to the distal end portion 31.
- the output gear portion 33 meshes with the sector gear 92 of the driving force transmission mechanism 9 and transmits the rotational driving force of the output shaft 3 to the driving force transmission mechanism 9.
- the engaging portion 35 is formed in a substantially cross-shaped cross section and is fitted to a driven plate 63 described later.
- the shaft portion 34, the engaging portion 35, and the tip portion 31 enter the internal spaces of the second housing 82 and the third housing 83.
- the distal end portion 31 is inserted into a concave portion 84 a formed on the inner side surface of the lid 84 (the surface facing the inner space of the housing 8).
- the output shaft 3 is supported by the housing 8 so as to be rotatable and immovable in the axial direction.
- the detection unit 5 is housed in the housing 8.
- the detection unit 5 includes a pinching detection unit 6 and a position detection unit 7.
- the pinching detection unit 6 is disposed in the second housing 82.
- the pinching detection unit 6 includes a worm wheel 61, a driving force transmission spring 62, a driven plate 63, a washer 64, a pinching detection plate 65, a pinching detection switch 66, and a leaf spring 67.
- the worm wheel 61 is disposed at the lowermost position in the drawing of the internal space S of the second housing 82.
- the worm wheel 61 is formed in a cylindrical shape.
- the worm wheel 61 includes an outer peripheral wall 61a having teeth (for example, helical teeth) formed on the outer peripheral side, a cylindrical inner peripheral wall 61c having a circular hole 61b formed on the inner periphery, and an outer peripheral wall 61a.
- a ring-shaped bottom surface portion 61d connecting the lower end of the inner peripheral wall portion 61c and the lower end of the inner peripheral wall portion 61c.
- the output shaft 3 is inserted through the circular hole 61b. Further, teeth formed on the outer peripheral wall portion 61 a mesh with a worm housed in the first housing 81.
- the worm wheel 61 and the worm constitute a worm reduction gear. Therefore, when the worm rotates, the rotation is transmitted to the worm wheel 61, and the worm wheel 61 rotates at a reduced speed with the output shaft 3 as the central axis.
- a locking portion 611 is formed in the worm wheel 61.
- the locking portion 611 is erected from the bottom surface portion 61d, and the height thereof is higher than the height of the outer peripheral wall portion 61a.
- a plurality (four in the present embodiment) of projecting pieces 612 formed in a convex shape along the circumferential direction are provided at equal intervals on the upper end surface of the outer peripheral wall 61a.
- Each protrusion 612 is formed in an arc shape along the outer peripheral wall portion 61a.
- One end of each projecting piece 612 is formed in a tapered shape as shown in the figure.
- the driving force transmission spring 62 is disposed on the bottom surface portion 61 d of the worm wheel 61.
- the driving force transmission spring 62 is formed in an arc shape along the bottom surface portion 61d, and is locked to the locking portion 611 at one end thereof.
- the driven plate 63 is formed in a substantially disk shape in which a part of the circumferential direction is cut into a fan shape.
- the driven plate 63 has a large-diameter portion 63b having a large diameter and a small-diameter portion 63c having a small diameter with a portion cut in a fan shape as a boundary.
- a cross-shaped through hole 63 a is formed at the center of the driven plate 63.
- the engaging portion 35 of the output shaft 3 is fitted into the cross-shaped through hole 63a.
- the driven plate 63 is connected to the output shaft 3 so as to be integrally rotatable.
- the driven plate 63 is restricted from moving in the axial direction by a washer 64 disposed above the driven plate 63.
- the driven plate 63 having such a shape is coaxially disposed on the worm wheel 61 in the second housing 82.
- the locking portion 611 formed on the worm wheel 61 protrudes from the gap formed by the fan-shaped portion of the driven plate 63 so that the locking portion 611 and the driven plate 63 are connected. Interference is prevented.
- a first projecting piece 63d extending downward in the drawing from one of the circumferential end portions (notched end portions) of the large-diameter portion 63b and a second projecting piece 63e extending upward in the drawing from the other are formed, respectively. Is done.
- the other end of the driving force transmission spring 62 disposed in the worm wheel 61 is locked to the first protrusion 63d.
- the driving force transmission spring 62 is locked to the locking portion 611 of the worm wheel 61 at one end and to the first protruding piece 63d of the driven plate 63 at the other end.
- the large-diameter portion 63b of the driven plate 63 is formed with an arc-shaped elongated hole 63f extending along the circumferential direction as shown in the figure.
- the pinch detection plate 65 includes a rotating plate 651 formed in a stepped disk shape, and a plurality of protrusion plates formed at equal intervals along the circumferential direction in the vicinity of the outer peripheral edge of the lower surface in the drawing of the rotating plate 651.
- Projecting piece 652. A circular hole through which the output shaft 3 is inserted is formed at the center of the rotating plate 651.
- a convex portion 651 a having a circular arc cross section is formed on the lower surface side of the rotating plate 651.
- the convex portion 651 a has a cross section having the same shape as the long hole 63 f formed in the driven plate 63.
- the pinching detection plate 65 is coaxially mounted on the driven plate 63 so that the convex portion 651a is fitted into the long hole 63f.
- the pinching detection plate 65 is connected to the driven plate 63 so as to be integrally rotatable and axially movable, and both the plates 63 and 65 are integrally rotated with the output shaft 3 as a central axis.
- an arc-shaped long hole 651b is formed in the rotating plate 651 along the circumferential direction.
- the plurality of projecting pieces 652 are provided along the circumferential direction of the rotating plate 651.
- the radial distances from the center of the rotating plate 651 to the respective protruding pieces 652 are the same.
- Each protrusion 652 is formed in an arc shape along the circumferential direction of the rotating plate 651. Further, one end face in the longitudinal direction of each protruding piece 651 is formed in a tapered shape.
- the number of projecting pieces 652 is the same as the number of projecting pieces 612 formed on the outer peripheral wall 61a of the worm wheel 61 (four in this embodiment).
- each protruding piece 652 The radial distance from the center of the rotating plate 651 to each protruding piece 652 is the same as the radial distance from the center of the worm wheel 61 to each protruding piece 612 formed on the outer peripheral wall portion 61a. Therefore, when the assembly of the pinching detection plate 65 and the driven plate 63 is placed on the worm wheel 61, each projecting piece 652 faces the upper end surface of the outer peripheral wall portion 61a of the worm wheel 61. When the worm wheel 61 and the pinching detection plate 65 rotate around the output shaft 3, the projecting piece 652 and the projecting piece 612 rotate on the same circumference.
- the projecting piece 612 interferes with the projecting piece 652.
- both the projecting pieces 612 and 652 interfere when the worm wheel 61 rotates in the direction of the arrow X in the drawing and the pinching detection plate 65 does not rotate, the tapered surfaces of the both projecting pieces 612 and 652 Engagement allows the relative rotation and pushes up the pinching detection plate 65.
- the leaf spring 67 has a ring-shaped portion and a plate-shaped portion extending radially from the ring-shaped portion, and the output shaft 3 is inserted into the ring-shaped portion.
- the leaf spring 67 is interposed between the pinching detection plate 65 and an operating lever 73 described later. Therefore, the elastic force of the leaf spring 67 acts on the pinching detection plate 65. By this elastic force, the pinching detection plate 65 is pressed against the driven plate 63 via the washer 64.
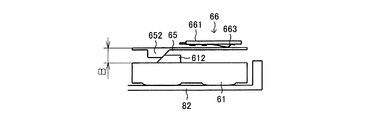
- FIG. 4 is a schematic side view of the pinching detection switch 66.
- the pinch detection switch 66 includes a substrate 661, a first conductive portion 662a and a second conductive portion 662b formed on the substrate 661, and a movable piece 663 having one end connected to the first conductive portion 662a. Have. When the tip of the movable piece 663 is separated from the substrate 661 as indicated by a solid line, the first conductive portion 662a and the second conductive portion 662b are in a non-conductive state.
- the tip of the movable piece 663 is pressed and comes into contact with the second conductive portion 662b on the substrate 661 as indicated by a broken line, the first conductive portion 662a and the second conductive portion 662b are interposed via the movable piece 663. Becomes conductive.
- the switching state of the pinch detection switch 66 is OFF, and when the first conductive portion 662a and the second conductive portion 662b are conductive, the switching state of the pinch detection switch 66 is ON. .
- the pinch detection switch 66 is arranged immediately above the pinch detection plate 65 in FIG. 3 so that the movable piece 663 faces the pinch detection plate 65, and its position is fixed by a fixing means (not shown). Accordingly, the switching state of the pinching detection switch 66 is changed by the vertical movement of the pinching detection plate 65.
- the pinching detection switch 66 may be formed on the inner surface side of the lid 84.
- a lubricant such as grease is usually applied to the meshing surface between the worm and the worm wheel 61, but a scattering prevention plate 4 is provided to prevent the grease from scattering.
- the scattering prevention plate 4 is placed at a position surrounding the space S in the second housing 82 on the bottom surface 83 a of the third housing 83.
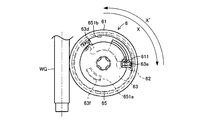
- FIG. 5 is a front view of the pinching detection unit 6 in which each component is assembled
- FIG. 6 is a sectional view taken along line VI-VI in FIG.
- the worm wheel 61 meshes with the worm WG housed in the first housing 81.
- the force transmission spring 62 is pressed in the X direction
- the driven plate 63 that is engaged with the other end of the driving force transmission spring 62 by the first protrusion 63 d is pressed in the X direction by the driving force transmission spring 62.
- the position detection unit 7 corresponds to the opening / closing position detection means of the present invention.
- the position detection unit 7 is disposed in the third housing 83.
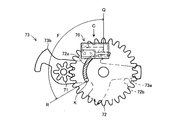
- the position detection unit 7 includes a first gear 71, a second gear 72, an operation lever 73, a restraining spring 74, a dead band region detection switch 75, and a reverse operation region detection switch 76.
- the connecting pin 77 and a stopper 73g attached to the third housing 83 are provided.
- a circular hole is formed in the center of the first gear 71. By fitting the output shaft 3 into the circular hole, the first gear 71 is supported by the output shaft 3 so as to be integrally rotatable.
- the second gear 72 is disposed at a position that meshes with the first gear 71.
- a convex cam 72 a is formed on the upper surface in the drawing of the second gear 72.
- the cam 72a has a predetermined length along the circumferential direction of the second gear 72, and is formed in an arc shape along the circumferential direction.
- a cylindrical convex portion 72b is formed on the lower surface. This convex part 72b is corresponded to the engaging member which can be engaged with the action
- a circular hole is formed at the center of the second gear 72, and the connecting pin 77 is inserted into the circular hole.
- the second gear 72 is rotatably supported by the connecting pin 77.
- the actuating lever 73 is disposed below the first gear 71 and the second gear 72 and is formed in an elongated flat plate shape.
- FIG. 7 is a front view of the operating lever 73.
- the operating lever 73 is formed with a first circular hole 73a through which the output shaft 3 is inserted.
- the output shaft 3 is inserted into the first circular hole 73a, the operating lever 73 is supported by the output shaft 3 so as to be relatively rotatable.
- the output shaft 3 is inserted through the circular hole formed in the first gear 71 after passing through the first circular hole 73a.
- the actuating lever 73 includes a first arm portion 73b extending from the first circular hole 73a to one side in the longitudinal direction (right side in the drawing) and a second arm portion extending to the other side (left side in the drawing). 73c.
- a second circular hole 73d is formed in the approximate center of the first arm portion 73b.
- a connecting pin 77 through which the second gear 72 is inserted is inserted into the second circular hole 73d.
- the operating lever 73 is connected to the second gear 72 through the connecting pin 77. Therefore, the operating lever 73 is supported by the output shaft 3 that rotates integrally with the first gear 71 so as to be relatively rotatable, and is connected to the second gear 72 via the connecting pin 77.
- the second gear 72 is rotatably disposed at a position immediately above the first arm portion 73b of the operating lever 73.
- the convex portion 72b formed on the lower surface of the second gear 72 is engaged with the distal end portion A of the first arm portion 73b when the second gear 72 rotates, and the proximal end.
- a locking portion 73e is formed on the first arm portion 73b.
- the locking portion 73e locks one end of a later-described holding spring 74.
- a step 73f is formed at the tip of the second arm portion 73c.
- the holding spring 74 is stored in a holding spring storage partition wall 83 c formed in the third housing 83.
- the holding spring accommodating partition wall 83c is formed by two concentric arc-shaped walls and a bottom wall that closes one end side of these arc-shaped walls, and the other end side is open. is doing.
- One end of the holding spring 74 housed in such a holding spring storage partition wall 83c is locked to the locking portion 73e of the operating lever 73 as described above, and the other end is fixed to the bottom wall of the holding spring storage partition wall 83c. Locked. Therefore, the operating lever 73 is urged by the extension force generated by the restraining spring 74 and tries to rotate around the first circular hole 73a. This rotation is applied to the stopper 73g provided in the third housing 83. It is regulated by the engagement of the tip end portion of the first arm portion 73b of the lever 73. The operation lever 73 is positioned by this restriction.
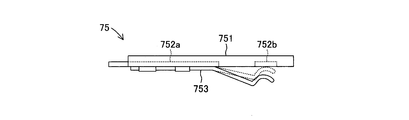
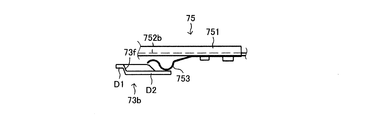
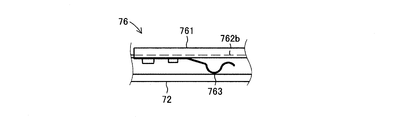
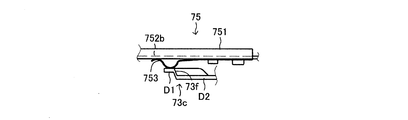
- FIG. 8 is a schematic side view of the dead zone detection switch 75
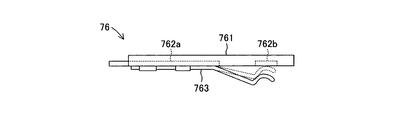
- FIG. 9 is a schematic side view of the reverse operation region detection switch 76. Similar to the pinch detection switch 66, these switches 75 and 76 have substrates 751 and 761, first conductive portions 752a and 762a and second conductive portions 752b and 762b formed on the substrates 751 and 761, and one ends of the switches 75 and 76. It has movable pieces 753 and 763 connected to one conductive portion 752a and 762a.
- the first conductive portions 752a and 762a and the second conductive portions 752b and 762b are in a non-conductive state.
- the first conductive is passed through the operation editions 753 and 763.
- the portions 752a and 762a and the second conductive portions 752b and 762b are brought into conduction.
- the switching state of the switches 75 and 76 is the OFF state, and when the first conductive portions 752a and 762a are in the conductive state, It is in the ON state.
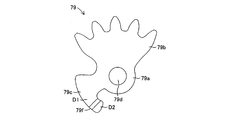
- the dead zone detection switch 75 is disposed immediately above the operation lever 73 as can be seen from FIG. Specifically, when the operating lever 73 rotates about the first circular hole 73a, the tip of the movable piece 753 gets over the step 73f formed at the tip of the second arm 73c of the operating lever 73.
- the dead zone detection switch 75 is fixed at the position.
- one portion D1 sandwiching the step 73f of the second arm portion 73c of the operating lever 73 is more than the other portion D2. Is also close. That is, the height position of the part D1 is higher than the height position of the part D2 when viewed from FIG.
- the dead zone detection switch 75 corresponds to the specific position region detection switch of the present invention.
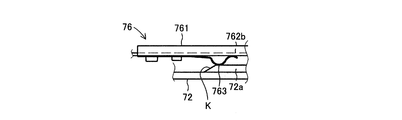
- the reverse operation region detection switch 76 is disposed immediately above the second gear 72. Specifically, when the second gear 72 rotates, the reverse operation region detection is performed at a position where the tip of the movable piece 763 can contact the cam 72a formed on the second gear 72 over the length direction. The switch 76 is fixed. When the tip of the movable piece 763 is in contact with the cam 72a, the tip of the movable piece 763 is pressed by the cam 72a and comes into contact with the second conductive portion 762b on the substrate 761, and the reverse operation region detection switch 76 is switched. The state becomes the ON state.
- the tip of the movable piece 763 is not in contact with the cam 72a, the tip of the movable piece 763 is separated from the second conductive portion 762b on the substrate 761, and the switching state of the reverse operation region detection switch 76 is turned off. Become. Note that the dead zone detection switch 75 and the reverse operation region detection switch 76 may be formed directly on the lid 84.
- the output shaft 3 Since the output shaft 3 is connected to the driven plate 63 so as to be integrally rotatable, the output shaft 3 also rotates in the X direction as the driven plate 63 rotates.
- the rotation of the output shaft 3 in the X direction is the rotation of the output shaft 3 in the clockwise direction when viewed from FIG. Therefore, the lift arm 93 of the driving force transmission mechanism 9 rotates counterclockwise in FIG. As a result, the window glass W is closed.
- FIG. 10 is a schematic side view showing both operating states in this case.
- the worm wheel 61 and the pinch detection plate 65 are rotating synchronously, as shown in FIG. 10, the gap between the protrusion 612 formed on the worm wheel 61 and the protrusion 652 formed on the pinch detection plate 65. The distance does not change.
- both the protruding pieces 612 and 652 rotate on the same circumference without interfering with a constant interval.
- the tip of the movable piece 663 of the pinch detection switch 66 placed on the pinch detection plate 65 is not in contact with the pinch detection plate 65, and therefore the second conductive portion 662b formed on the substrate 661. Do not touch. That is, when the foreign object is not pinched, the switching state of the pinch detection switch 66 is OFF.
- the rotation of the output shaft 3 stops.
- the driven plate 63 and the pinching detection plate 65 also stop rotating.
- the worm wheel 61 receives the rotational driving force of the electric motor 2 and continues to rotate in the X direction of FIGS. For this reason, the worm wheel 61 rotates relative to the driven plate 63 and the pinching detection plate 65 in the X direction.
- FIG. 11 is a front view of the pinching detection unit 6 showing an operation state when the driving force transmission spring 62 is compressed.
- FIG. 12 is a side view showing a state in which both projecting pieces 612 and 652 interfere with each other. As shown in the figure, the two protruding pieces 612 and 652 are engaged with each other at the tapered surfaces. Due to this engagement, the protrusion 652 of the pinching detection plate 65 rides on the protrusion 612 of the worm wheel 61. As a result, the pinching detection plate 65 is pushed upward.
- the pinching detection plate 65 is pushed upward while maintaining a horizontal state without being inclined in the circumferential direction.
- the pinching detection plate 65 When the pinching detection plate 65 is pushed upward by the engagement of both protrusions 612 and 652, the upper surface of the pinching detection plate 65 presses the movable piece 663 of the pinching detection switch 66 as shown in FIG. As a result, the tip of the movable piece 663 comes into contact with the second conductive portion 662b formed on the substrate 661, and the first conductive portion 662a and the second conductive portion 662b become conductive. That is, when a foreign object is caught, the switching state of the pinching detection switch 66 is turned on.
- the pinching detection plate 65 when the pinching detection plate 65 is not moved in the axial direction (not pushed up), that is, when pinching has not occurred, the switching state of the pinching detection switch 66 is turned off, and pinching detection is performed.
- the plate 65 moves axially in a direction away from the worm wheel 61 (ie, is pushed up), that is, when pinching has occurred, the switching state of the pinching detection switch 66 is turned on.
- the distance between the pinch detection plate 65 and the worm wheel 61 when the pinch detection plate 65 is not pushed up is A (see FIG. 10), and the distance when the pinch detection plate 65 is pushed up is the above distance.
- B see FIG. 12
- the pinching detection switch 66 is in a position where the switching state is OFF when the distance is A and the switching state is ON when the distance is B. Installed.
- FIG. 13 is a schematic view showing the opening / closing position of the window glass W.
- the opening / closing position of the window glass W is represented by the position of the upper end of the window glass W.
- the window glass W is fully opened when the open / close position of the window glass W is represented by the line P in the figure, and is fully closed when it is the fully closed position represented by the line S in the figure. Further, when the window glass W is opened and closed in a position belonging to the region RS between the position near the fully closed position and the fully closed position represented by the line R in FIG.
- a weather strip or the like provided on the window frame, there is a possibility that the foreign object is erroneously detected.
- Such a region RS in which pinching is erroneously detected immediately before the window glass W is completely closed is referred to as a dead zone region in the present specification.
- This dead zone region corresponds to the specific position region of the present invention.
- the open / close position represented by the line R in the figure is referred to as a dead zone start position in this specification.
- the open / close position of the window glass W is a position belonging to a region (region PR) from the fully open position to the dead zone start position, that is, a position not belonging to the dead zone
- the projection 72b of 72 is not engaged with the actuation lever 73 and the open / close position is a position belonging to the dead zone (region RS)
- the projection 72b engages with the actuation lever 73 and the actuation lever 73 is rotated. In this manner, the arrangement relationship between the convex portion 72b and the operating lever 73 is set.
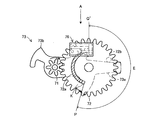
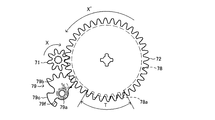
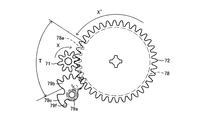
- FIG. 14 is a front view showing an arrangement relationship of the first gear 71, the second gear 72, and the operating lever 73.
- the holding spring 74 biases the operating lever 73 in the X ′ direction (counterclockwise direction) in the figure.
- the stopper 73g restricts the rotation of the operating lever 73 in the X ′ direction by the urging force of the holding spring 74. Due to this rotation restriction, the operating lever 73 is positioned at the position shown in the figure.
- the 1st gearwheel 71 and the 2nd gearwheel 72 are assembled
- the convex portion 72b formed on the second gear 72 is a position represented by reference numeral 72b "from the position represented by reference numeral 72b 'in FIG.
- the convex portion 72b is moved from the position represented by reference numeral 72b "in the figure. It rotates in the direction opposite to the X ′ direction along the one-dot chain line arrow S ′ in the figure up to the position represented by reference numeral 72 b ′.
- the rotation region of the convex portion 72b represented by the solid line arrow S and the one-dot chain line arrow S ' is represented by the rotation region U in the drawing.
- the position represented by reference numeral 72 b ′ is a position in contact with the upper side of the distal end portion of the first arm portion 73 b of the operating lever 73 in the drawing.
- the position represented by reference numeral 72b ′′ is a position in contact with the lower side of the distal end portion of the first arm portion 73b. Therefore, when the rotational position of the convex portion 72b is a position within the rotation region A, the convex portion 72b is It does not engage with the operating lever 73. That is, when the opening / closing position of the window glass W is a position between the fully open position and the dead zone start position, that is, a position that does not belong to the dead zone, the second gear 72 is moved to the operating lever 73. Does not engage.
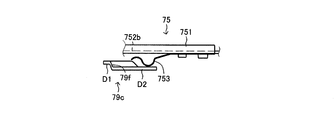
- FIG. 15 is a partial side schematic view showing a contact state between the dead zone detection switch 75 and the operating lever 73 when the operating lever 73 is not rotating.
- the tip of the movable piece 753 of the dead zone detection switch 75 abuts on a portion D1 having a high height across the step 73f of the second arm portion 73b of the actuating lever 73, and is pushed from this portion. Under pressure, it contacts the second conductive portion 752b formed on the substrate 751. Therefore, when the opening / closing position of the window glass W is a position that does not belong to the dead zone, the switching state of the dead zone detection switch 75 is in the ON state.
- the convex portion 72b of the second gear 72 is located at a position represented by reference numeral 72b "in FIG. 14 (this position is above the first arm portion 73b of the operating lever 73). At a position farther than the position where the second gear 72 is coupled as viewed from the position where the operating lever 73 is supported by the output shaft 3). In this case, since the second gear 72 is attached to the operating lever 73 via the connecting pin 77, the engagement of the projection 72b and the operating lever 73 stops the rotation of the second gear 72 relative to the operating lever 73.
- the second gear 72 is rotated around the first gear 71 in the X direction by meshing with the first gear 71. That is, the second gear 72 is rotated in the X direction.
- the wheel 72 revolves around the first gear 71 in the X direction (the same direction as the rotation direction of the first gear 71) by the rotational force of the first gear 71.
- the second gear 72 revolves in the X direction, thereby
- the operating lever 73 connected to the gear 72 by the connecting pin 77 rotates in the X direction (clockwise direction) around the first gear 71 (output shaft 3) against the biasing force of the holding spring 74.
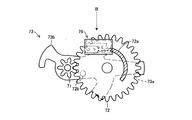
- FIG. 16 is a front view showing the arrangement relationship of the first gear 71, the second gear 72, and the operating lever 73 when the operating lever 73 is rotated.
- the operating lever 73 is moved from the position represented by the two-dot chain line in the figure to the position represented by the solid line (the hidden portion is the dotted line). 3 is rotated in the X direction while maintaining the engaged state with the second gear 72.
- the operating lever 73 moves the output shaft 3 from the position represented by the solid line to the position represented by the two-dot chain line when the window glass W is opened from the fully closed position to the dead zone start position.
- FIG. 17 is a partial schematic side view showing a contact state between the dead zone detection switch 75 and the operation lever 73 when the operation lever 73 is rotating in the rotation region V of FIG.
- the tip of the movable piece 753 of the dead zone detection switch 75 immediately contacts the portion D2 having a low height position across the step 73f of the second arm portion 73b when the operating lever 73 rotates. It is separated from the second conductive part 752b. Therefore, when the opening / closing position of the window glass W is a position belonging to the dead zone, the switching state of the dead zone detection switch 75 is OFF.
- the dead zone detection switch 75 is switched based on the rotation of the operation lever 73. Specifically, the switching state of the dead zone detection switch 75 is ON when the operating lever 73 is not rotating, that is, when the opening / closing position of the window glass W is not in the dead zone, and the operating lever When 73 is rotating, that is, when the opening / closing position of the window glass W is a position belonging to the dead zone, it is in the OFF state.
- the positional relationship between the rotation position of the cam 72a formed on the upper surface of the second gear 72 and the reverse operation region detection switch 76 is also associated with the opening / closing position of the window glass W that changes as the output shaft 3 rotates.
- the reverse operation region detection switch 76 is turned on when the position belongs to the reverse operation region), and the reverse operation region detection is performed when the window opening / closing position is a position not belonging to the reverse operation region.
- the positional relationship between the rotational position of the cam 72a and the reverse operation region detection switch 76 is determined so that the switch 76 is switched off.
- FIG. 18A is a front view showing the positional relationship between the rotation position of the cam 72a and the reverse operation region detection switch 76 when the open / close position of the window glass W is the fully open position
- FIG. 18B is a view in the direction of arrow A in FIG. 18A.
- FIG. When the open / close position of the window glass W is the fully open position, the movable piece 763 of the reverse operation region detection switch 76 is in contact with a portion of the second gear 72 where the cam 72a is not formed. At this time, the tip of the movable piece 763 is not in contact with the second conductive portion 762b. Therefore, in this case, the switching state of the reverse operation region detection switch 76 is the OFF state.
- one end K in the longitudinal direction of the cam 72a is represented by a line Q 'from the rotational position represented by the line P in the figure. Rotate to the rotated position.
- the end K is rotated from the rotation position represented by the line Q ′ to the rotation position represented by the line P. Rotate.
- the rotation position of the end K is a position belonging to the rotation area E between the rotation position represented by the line P and the rotation position represented by the line Q ′, the movable piece of the reverse operation area detection switch 76 763 does not contact the cam 72a.
- the switching of the reverse operation region detection switch 76 is performed.
- the state is an OFF state.
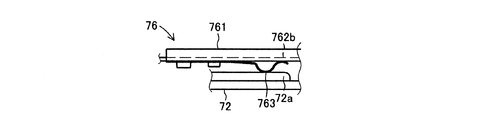
- FIG. 19A is a front view showing the positional relationship between the rotational position of the cam 72a and the reverse operation region detection switch 76 when the opening / closing position of the window glass W is the reverse operation region start position
- FIG. 19B is a B direction arrow in FIG. FIG.
- the movable piece 763 of the reverse operation region detection switch 76 starts to ride on the end K of the cam 72a. For this reason, the tip of the movable piece 763 is pressed by the cam 72a to contact the second conductive portion 762b, and the first conductive portion 762a and the second conductive portion 762b are conducted. As a result, the switching state of the reverse operation region detection switch 76 is switched to the ON state.
- FIG. 20A is a front view showing the positional relationship between the rotation position of the cam 72a and the reverse operation region detection switch 76 when the opening / closing position of the window glass W is the dead zone start position
- FIG. 20B is a view in the direction C of FIG. 20A.
- FIG. As shown in the figure, when the opening / closing position of the window glass W is the dead zone start position, the movable piece 763 of the reverse operation region detection switch 76 is in contact with the cam 72a. For this reason, the tip of the movable piece 763 is pressed by the cam 72a to contact the second conductive portion 762b, and the first conductive portion 762a and the second conductive portion 762b are conducted. Therefore, when the open / close position of the window glass W is the dead zone start position, the switching state of the reverse operation region detection switch 76 is the ON state.
- the switching state of the reverse operation region detection switch 76 is It is in the ON state.
- the second gear 72 revolves around the first gear 71. Accordingly, during this time, the switching state of the reverse operation region detection switch 76 is OFF.
- the window regulator device of the present embodiment includes the pinching detection switch 66, the dead zone detection switch 75, and the reverse operation region detection switch 76.
- the pinch detection switch 66 is switched based on whether pinch is detected.
- the dead zone detection switch 75 is switched based on whether or not the opening / closing position of the window glass W belongs to the dead zone.
- the reverse operation region detection switch 76 is switched based on whether or not the open / close position of the window glass W belongs to the reverse operation region. Table 1 summarizes when the switching state of each switch is ON and when it is OFF.
- the sandwiching process is executed when all the switches are switched on.
- the sandwiching process in the present embodiment is a reversing operation process for reversing the window glass W from the closing operation to the opening operation.
- the pinching process is not executed when the opening / closing position of the window glass W is not a position belonging to the reversal operation region. .
- the reason is as follows.
- the moment acting on the output shaft varies depending on the rotational position of the lift arm as shown in the graph of FIG.
- the rotational position of the lift arm is the horizontal position in FIG. 1
- the largest moment acts on the output shaft.
- the trapping may be erroneously detected by the moment.
- the pinching process must be prohibited when the moment acting on the output shaft is large.
- the rotation region of the lift arm that reduces the moment acting on the output shaft is obtained in advance, and the opening / closing region of the window glass corresponding to the obtained rotation region is defined as the reverse operation region.
- the sandwiching process is permitted only when the opening / closing position of the window glass is a position belonging to this reversal operation region. This prevents erroneous detection of pinching due to a change in the moment acting on the output shaft.
- the opening / closing of the window glass W corresponding to the rotation region from the reverse operation permission position to the upper limit position on the upper limit position side of the horizontal position in the rotation region of the lift arm.
- the region is defined as a reverse operation region.
- a cam 72a is formed on the second gear 72 so that the switching state of the reverse operation region detection switch 76 is turned on when the open / close position of the window glass W belongs to the reverse operation region.
- the sandwiching process may be executed based on a command signal from the ECU, for example.
- the switches 66, 75, and 76 are connected to the ECU, and the ECU monitors the switching state of each switch. When all the switches are in the ON state, a command signal for executing the sandwiching process is output from the ECU to the electric motor. Thereby, the sandwiching process is executed.
- the window regulator device of the present embodiment includes a drive circuit (electric circuit) in which an energization path from the power source to the electric motor 2 is formed to drive the electric motor 2, and each switch is connected to the electric motor 2.
- the sandwiching process is executed without using an ECU by being incorporated in a drive circuit for energization and by applying a predetermined device to the circuit configuration of the drive circuit.
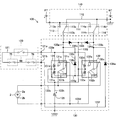
- FIG. 21 is a circuit diagram showing a drive circuit for driving the electric motor 2.
- the drive circuit 100 is roughly divided into a power window switch circuit unit 110, a detection switch circuit unit 120, and a drive circuit unit 130.
- the power window switch circuit unit 110 includes a high voltage line 111 and a low voltage line 112 as an energization path, a first switch contact 113 and a second switch contact 114.
- the high voltage line 111 is connected to the positive terminal PT of the power source, and the low voltage line 112 is connected to the negative terminal NT of the power source.
- the negative terminal NT side of the power source is body grounded (installed) on the vehicle body or the like.
- the first switch contact 113 and the second switch contact 114 are two-input / one-output type changeover switch contacts having first input terminals 113a and 114a, second input terminals 113b and 114b, and one output terminal 113c and 114c. These switch contacts selectively switch the connection state between the input and output terminals according to the operation position of the operation switch for opening and closing the window glass provided in the vehicle interior.
- the operation position of the operation switch can be switched to a neutral position, a closed operation position, and an open operation position. When the operation switch is not operated, the operation position is the neutral position. When closing the window glass, the operation switch is operated so that the operation position becomes the closing operation position. When opening the window glass, the operation switch is operated so that the operation position becomes the opening operation position.
- the high voltage line 111 is connected to the first input terminals 113a and 114a, and the low voltage line 112 is connected to the second input terminals 113b and 114b.
- the second input terminals 113b and 114b are connected to the output terminals 113c and 114c as shown in the figure.
- the detection switch circuit unit 120 includes a pinching detection switch 66, a dead zone detection switch 75, a reverse operation region detection switch 76, and a switch line 121 that is an energization path that connects these switches in series. One end 121a and the other end 121b of the switch line 121 are conducted when all the switches are switched on.
- the drive circuit unit 130 includes a first latching relay 131 and a second latching relay 132.
- these latching relays 131 and 132 are two-coil latching relays having first coils 131d and 132d and second coils 131e and 132e.
- the first terminal 131a and the third terminal 131c are conducted when the first coil 131d is energized, and the second terminal 131b and the third terminal 131c are energized when the second coil 131e is energized. Is conducted.
- the switching state (the state shown in the figure) in which the second terminal 131b and the third terminal 131c of the first latching relay 131 are conductive is referred to as a standard state, and the first terminal 131a and the third terminal 131c.
- a switching state in which is conductive is called an inverted state.
- a switching state in which the second terminal 132b and the third terminal 132c of the second latching relay 132 are conductive is called a standard state, and the first terminal 132a and the third terminal A switching state in which 131c is conducting is referred to as an inverted state.
- the first coil 131d and the second coil 131e of the first latching relay 131 are connected in series.
- the first coil 132d and the second coil 132e of the second latching relay 132 are connected in series.
- the drive circuit unit 130 includes a first line 133a, a second line 133b, a third line 133c, and a fourth line 133d as power supply lines to the electric motor 2.
- the first line 133 a electrically connects the third terminal 131 c of the first latching relay 131 and the output terminal 113 c of the first switch contact 113.
- the second line 133b electrically connects the third terminal 132c of the second latching relay 132 and the output terminal 114c of the second switch contact 114.
- the third line 133c is electrically connected to the first power supply terminal 2a that is one power supply terminal of the electric motor 2 at one end thereof.
- the other end branches into two lines, one branch line is connected to the second terminal 131b of the first latching relay 131, and the other branch line is connected to the first terminal 132a of the second latching relay 132.
- the fourth line 133d is electrically connected to the second power supply terminal 2b which is the other power supply terminal of the electric motor 2 at one end thereof.
- the other end branches into two lines, one branch line is connected to the first terminal 131a of the first latching relay 131, and the other branch line is connected to the second terminal 132b of the second latching relay 132.
- the electric motor 2 can be rotated forward and backward, and when current flows in the direction from the first power supply terminal 2a to the second power supply terminal 2b, the electric motor 2 rotates in the forward direction, and from the second power supply terminal 2b.
- the motor rotates in the opposite direction.
- the window glass W is closed.
- the electric motor 2 is driven to rotate in the reverse direction, the window glass W is opened.
- the drive circuit unit 130 has a fifth line 133e and a sixth line 133f.
- One end of the fifth line 133e is connected to one end 121a of the switch line 121 of the detection switch circuit unit 120.
- the other end of the fifth line 133e branches into two lines, one branch line to the first coil 131d of the first latching relay 131, and the other branch line to the first coil 132d of the second latching relay 132. , Each connected.
- One end of the sixth line 133f is connected to the other end 121b of the switch line 121.
- the other end of the sixth line 133f is connected to the second line 133b.
- a first diode 134a is attached to the sixth line 133f.
- the first diode 134a flows in a direction from one end side (side connected to the other end 121b of the switch line 121) to the other end side (side connected to the second line 133b) of the sixth line 133f. And the current flowing in the opposite direction is cut off.
- the drive circuit unit 130 has a seventh line 133g and an eighth line 133h.
- the seventh line 133g connects the second coil 131e of the first latching relay 131 and the second coil 132e of the second latching relay 132.
- the eighth line 133h is connected to the seventh line 133g at one end and to the first line 133a at the other end.
- a second diode 134b is attached to the eighth line 133h.
- the second diode 134b allows a current to flow in a direction from one end side (side connected to the seventh line 133g) to the other end side (side connected to the first line 133a) of the eighth line 133h. The current flowing in the opposite direction is cut off.
- the drive circuit unit 130 includes a ninth line 133i, a tenth line 133j, and an eleventh line 133k.
- the ninth line 133i is connected to the first line 133a at one end and to the second line 133b at the other end.
- one end side of the ninth line 133i is connected to a portion of the first line 133a between the connection point of the first switch contact 113 with the output terminal 113c and the connection point of the eighth line 133h. Is done.
- the other end of the ninth line 133i is connected to a portion of the second line 133b between the connection point of the second switch contact 114 with the output terminal 114c and the connection point of the sixth line 133f. .
- the tenth line 133j is connected to the ninth line 133i at one end thereof.
- the other end side of the tenth line 133j is branched into two lines, and one branch line is connected to a conductor portion that connects the first coil 131d and the second coil 131e of the first latching relay 131 in series,
- the other branch line is connected to a conductor portion that connects the first coil 132d and the second coil 132e of the second latching relay 132 in series.
- a third diode 134c and a fourth diode 134d are attached to the ninth line 133i.
- the third diode 134c is provided between one end of the ninth line 133i (the end connected to the first line 133a) and the portion connected to the tenth line 133j, and the fourth diode 134d It is provided between the other end of the 9th line 133i (the end connected to the second line 133b) and the portion connected to the 10th line 133j. That is, the third diode 134c and the fourth diode 134d are provided across the connection point between the ninth line 133i and the tenth line 133j.
- the third diode 134c allows a current flowing in the direction from one end to the other end of the ninth line 133i and blocks a current flowing in the opposite direction.
- the fourth diode 134d allows a current flowing in the direction from the other end of the ninth line 133i to the one end, and blocks a current flowing in the opposite direction.
- the eleventh line 133k is connected to the tenth line 133j at one end thereof.
- the other end side of the eleventh line 133k is grounded (body earth).
- a capacitor 135 is attached to the eleventh line 133k.
- FIG. As shown, the first input terminal 113a and the output terminal 113c of the first switch contact 113 are connected, and the second input terminal 114b and the output terminal 114c of the second switch contact 114 are connected. As a result, the high voltage line 111 is connected to the first line 133 a via the first switch contact 113.
- the switching state of the first latching relay 131 is the standard state (the second terminal 131b and the third terminal 131c are conductive). Therefore, the first line 133a and the third line 133c are connected via the first latching relay 131.
- the positive terminal PT of the power source and the first feeding terminal 2a of the electric motor 2 are electrically connected via the high voltage line 111, the first switch contact 113, the first line 133a, the first latching relay 131, and the third line 133c. Connected.
- the low voltage line 112 is connected to the second line 133b through the second switch contact 114.
- the switching state of the second latching relay 132 is the standard state (the second terminal 132b and the third terminal 132c are in conduction)
- the second line 133b and the fourth line 133d are connected via the second latching relay 132.
- the negative terminal NT of the power source and the second feeding terminal 2b of the electric motor 2 are electrically connected via the low voltage line 112, the second switch contact 114, the second line 133b, the second latching relay 132, and the fourth line 133d. Connected.
- a power feeding path as shown by a thick line in FIG. 22 is formed, and power from the power source is supplied to the electric motor 2.
- a current flows from the first power supply terminal 2a of the electric motor 2 to the second power supply terminal 2b.
- the electric motor 2 rotates forward.
- the window glass W is closed.
- the current flowing from the high voltage line 111 through the first switch contact 113 through the first line 133a is shunted to the ninth line 133i side, and further flows through the tenth line 133j and the eleventh line 133k.
- the capacitor 135 attached to the eleventh line 133k is charged by the current flowing through the eleventh line 133k.
- the operation switch when the operation switch is operated so that the window glass W is opened (when the operation position is the open operation position), the second input terminal 113b of the first switch contact 113 and the output are output as shown in FIG.
- the terminal 113c is connected, and the first input terminal 114a and the output terminal 114c of the second switch contact 114 are connected.
- the high voltage line 111 is connected to the second line 133b via the second switch contact 114. Since the switching state of the second latching relay 132 is the standard state, the second line 133b and the fourth line 133d are connected via the second latching relay 132.
- the positive terminal PT of the power source and the second feeding terminal 2b of the electric motor 2 are electrically connected via the high voltage line 111, the second switch contact 114, the second line 133b, the second latching relay 132, and the fourth line 133d. Connected.
- the low voltage line 112 is connected to the first line 133a via the first switch contact 113.
- the first line 133a and the third line 133c are connected via the first latching relay 131. Therefore, the negative terminal NT of the power source and the first feeding terminal 2a of the electric motor 2 are electrically connected via the low voltage line 112, the first switch contact 113, the first line 133a, the first latching relay 131, and the third line 133c. Connected.
- a power feeding path as shown by the bold line in the figure is formed, and power from the power source is supplied to the electric motor 2.
- a current flows in the direction from the second power supply terminal 2b of the electric motor 2 toward the first power supply terminal 2a.
- the electric motor 2 rotates in the reverse direction.
- the window glass W is opened by the reverse rotation of the electric motor 2.
- the current flowing from the high voltage line 111 to the second line 133b through the second switch contact 114 is shunted to the ninth line 133i side, and further flows through the tenth line 133j and the eleventh line 133k.
- the capacitor 135 is charged by the current flowing through the eleventh line 133k.
- the movable piece 131f When the first coil 131d of the first latching relay 131 is energized, the movable piece 131f is activated to connect the first terminal 131a and the third terminal 131c.
- the second latching relay 132 When the second latching relay 132 is energized to the first coil 132d, the movable piece 132f is activated to connect the first terminal 132a and the third terminal 132c. In this way, the switching state of the first and second latching relays 131 and 132 is switched from the standard state to the reverse state.
- the power supply path from the power source to the electric motor 2 changes as shown in FIGS.
- the positive terminal PT of the power source is connected to the second power supply terminal 2b of the electric motor 2 via the high voltage line 111-first switch contact 113-first line 133a-first latching relay 131-fourth line 133d.
- the negative terminal NT of the power source is connected to the first power supply terminal 2a of the electric motor 2 through the low voltage line 112-second switch contact 114-second line 133b-second latching relay 132-third line 133c.
- the feeding direction to the electric motor 2 is reversed, and the electric motor 2 rotates in the reverse direction.
- the window glass W is reversed by the reverse rotation of the electric motor 2. That is, when pinching is detected, the window glass W is opened even if the operation switch is operated so as to close the window.
- the discharge current of the capacitor 135 is changed from the eleventh line 133k to the tenth line 133j to the second coil 131e of the first latching relay 131 and the second coil 132e to the second latching relay 132.
- the current flows through a relay circuit that connects the 7th line 133g, the eighth line 133h, the first line 133a, and the low voltage line 112. Therefore, the second coil 131e of the first latching relay 131 and the second coil 132e of the second latching relay 132 provided between the tenth line 133j and the seventh line 133g are energized.
- the movable piece 131f is actuated by energizing the second coil 131e of the first latching relay 131 to connect the second terminal 131b and the third terminal 131c.
- the movable piece 132f is actuated by energizing the second coil 132e of the second latching relay 132, and the second terminal 132b and the third terminal 132c are connected.
- the window glass W is automatically opened and closed without using the ECU, and the window glass W is automatically reversed when the pinching is detected.
- the window regulator device includes the electric motor 2 as a power source, the output shaft 3 connected to the electric motor 2 and rotated by the rotational driving force generated by the electric motor 2, and the output shaft 3.
- the driving force transmission mechanism 9 transmits the rotational driving force of the output shaft 3 to the window glass W so that the window glass W of the vehicle is opened and closed by the rotational driving force, and the dead zone region where the opening / closing position of the window glass W is predetermined.
- a position detection unit 7 for detecting whether or not the position is present is provided.
- the position detection unit 7 performs switching operation based on the rotation operation of the first gear 71 and the second gear 72, the operating lever 73, and the operating lever 73 as rotating members that rotate by the rotational driving force of the output shaft 3.
- a dead zone detection switch 75 is provided.
- the operating lever 73 does not engage with the second gear 72 when the opening / closing position of the window glass W is not in the dead zone area, and the operating lever 73 is first when the opening / closing position of the window glass W is in the dead zone area.
- Two gears 72 are engaged. And it rotates as FIG. 16 shows with the rotational drive force of the output shaft 3 transmitted via the 2nd gearwheel 72 at the time of engagement.
- the operating lever 73 is used as a detection member for changing the switching state of the dead zone detection switch 75. Since the operating lever 73 is provided as a separate body from the rotating members (the first gear 71 and the second gear 72), the operating stroke can be increased without being affected by the size of the rotating member. Since the operation stroke can be increased, even if there is a slight shift in the arrangement of the operation lever 73 and the dead zone detection switch 75, the detection error of the dead zone based on the shift can be reduced. . Therefore, deterioration in detection accuracy can be sufficiently suppressed without strictly managing the shape of the operating lever 73 and the arrangement relationship between the operating lever 73 and the dead zone detection switch 75.
- a rotating member that is rotated by the rotational driving force of the output shaft 3 meshes with the first gear 71 and the first gear 71 supported so as to be integrally rotatable with the output shaft 3, and decelerates the rotation of the first gear 71.
- the second gear 72 is formed with a convex portion 72 b that can be engaged with the operating lever 73. Further, the convex portion 72b does not engage with the operation lever 73 when the opening / closing position of the window glass W is not in the dead zone area, and is operated when the opening / closing position of the window glass W is in a position belonging to the dead band area.
- 73 is formed on the second gear 72 so as to be engaged with the gear 73.
- the operation lever 73 is rotated by the rotational driving force of the output shaft 3 transmitted through the second gear 72 when engaged with the convex portion 72b.
- the rotational driving force of the output shaft 3 is applied to the operating lever 73 via the convex portion 72b, the second gear 72, and the first gear 71. Reliable transmission.
- the operating lever 73 is supported by the output shaft 3 so as to be relatively rotatable, and is connected to the second gear 72 via a connecting pin 77 that rotatably supports the second gear 72. Therefore, when the convex portion 72b formed on the second gear 72 is engaged with the operation lever 73, the engagement prevents the rotation of the second gear 72 and the operation lever 73 and the second gear 72 are integrated with each other. Can work. During this engagement, the second gear 72 revolves around the first gear 71 in the same direction as the rotation direction of the first gear 71 by meshing with the first gear 71.
- the operation lever 73 connected to the second gear 72 by the connection pin 77 rotates about the output shaft 3 (first gear) in the same direction as the rotation direction of the first gear 71.
- the rotation of the second gear 72 is restricted by the engagement of the operation lever 73 and the second gear 72, and the operation lever 73 is rotated along with the revolution of the second gear 72 by the rotational force of the first gear 71.
- the operating lever 73 is more reliably rotated.
- the position detection unit 7 includes a holding spring 74 that urges the operating lever 73 in a direction (X ′ direction) opposite to the direction (X direction) in which the output shaft 3 rotates when the window glass W is closed. And a stopper 73g for positioning the rotation position of the operation lever 73 by restricting the rotation of the operation lever 73 by the biasing force of 74. For this reason, when the convex part 72b is not engaged with the operation lever 73, the operation lever 73 is reliably positioned at a desired position.
- the configuration of the window regulator device of the present embodiment is substantially the same as the configuration described in the first embodiment except for the position detection unit. Therefore, the description of the same configuration as that of the first embodiment will be omitted by referring to the first embodiment, and different configurations will be mainly described below.
- the window regulator device also includes the drive mechanism 1 and the drive force transmission mechanism 9 as described with reference to FIG. 1 in the first embodiment. Since the structure of the driving force transmission mechanism 9 is the same as that described in the first embodiment, the description thereof is omitted.
- FIG. 28 is an exploded perspective view of the drive mechanism 1 in the present embodiment.
- the drive mechanism 1 includes an electric motor 2, an output shaft 3, a detection unit 5 and a housing 8. Since the configuration of the electric motor 2 and the output shaft 3 is the same as that of the first embodiment, the description thereof is omitted.
- the housing 8 connected to the electric motor 2 also includes a first housing 81, a second housing 82, a third housing 83, and a lid 84 as in the first embodiment.
- the configurations of the first housing 81 and the second housing 82 are the same as those in the first embodiment.
- the outer shape of the third housing 83 is the same as the third housing shown in the first embodiment.
- first support pin 771 and the second support pin 772 are provided on the bottom surface 83a of the third housing 83 in the present embodiment.
- the first support pin 771 is pivotally supported by a boss portion 83e formed on the bottom surface 83a so as to be relatively rotatable, and extends upward in the drawing.
- a fitting portion 771a having a cross-shaped cross section is formed at the base end portion of the first support pin 771.
- the second support pin 772 is fixed to the bottom surface 83 a of the third housing 83.
- a stopper 772 a is formed at the base end portion of the second support pin 772. The tips of the first support pin 771 and the second support pin 772 are rotatably supported by the lid 84.
- the detection unit 5 includes a pinching detection unit 6 and a position detection unit 7. Since the sandwiching detection unit 6 has the same configuration as that described in the first embodiment, description thereof is omitted here.
- the position detection unit 7 is provided in the first gear 71, the second gear 72, the lever drive gear 78, the operation lever 79, the holding spring 74, the dead band region detection switch 75, the reverse operation region detection switch 76, and the third housing 83.
- the first support pin 771 and the second support pin 772 are provided.
- a circular hole is formed in the center of the first gear 71, and the first gear 71 is supported by the output shaft 3 so as to be integrally rotatable by inserting the output shaft 3 into the circular hole.
- the second gear 72 meshes with the first gear 71.
- the number of teeth of the second gear 72 is greater than the number of teeth of the first gear 71. Therefore, the second gear 72 decelerates the rotation of the first gear 71.
- a convex cam 72 a is formed on the upper surface in the drawing of the second gear 72.
- the cam 72 a is formed in an arc shape having a predetermined length along the circumferential direction of the second gear 72.
- a through hole 72c having a cross-shaped cross section is formed at the center of the second gear 72.
- the lever drive gear 78 is disposed below the second gear 72 in the figure.
- a tooth portion 78 a is formed on a part of the outer periphery of the lever drive gear 78.
- a through hole 78b having a cross-shaped cross section is formed at the center of the lever driving gear 78.
- the fitting portion 771a of the first connecting pin 771 is fitted into the cross-shaped through hole 72c formed in the second gear 72 and the cross-shaped through hole 78b formed in the lever driving gear 78, whereby the second gear. 72 and a lever drive gear 78 are supported by the first connecting pin 771 so as to be integrally rotatable.
- the actuating lever 79 is formed in a plate shape, a base portion 79a, a gear portion 79b formed in a fan shape around the base portion 79a and having teeth formed on the outer periphery, and a lever portion formed in a bowl shape extending from the base portion 79a. 79c.
- a circular hole 79d is formed in the base 79a.
- the operating lever 79 is disposed at a position where the gear portion 79b can mesh with a tooth portion 78a formed on the outer periphery of the lever driving gear 78.
- the second support pin 772 is inserted through the circular hole 79d. As a result, the operating lever 79 is rotatably supported by the second support pin 772.
- a holding spring 74 is attached to the second support pin 772.
- the holding spring 74 engages with a stopper 772a formed on the second support pin 772 at one end, and engages with an operating lever 79 attached to the second support pin 772 at the other end.
- the position of the operating lever 79 is regulated by the elastic force of the holding spring 74.
- FIG. 29 is a front view of the operating lever 79. As can be seen from the drawing, a step 79f is formed in the lever portion 79c. When the axial direction of the circular hole 79d is defined as the height direction, the position in the height direction of one part D1 across the step 79f is different from the position in the height direction of the other part D2.
- the configurations of the dead zone detection switch 75 and the reverse actuation region detection switch 76 are the same as the configurations of the dead zone detection switch 75 and the reverse actuation region detection switch 76 described with reference to FIGS. 8 and 9 in the first embodiment. Therefore, the explanation is omitted by referring to these figures.
- the dead zone detection switch 75 is positioned so that the tip of the movable piece 753 gets over the step 79f formed on the lever 79c of the operating lever 79 when the operating lever 79 rotates about the second support pin 772. Fixed. When viewed from the dead zone detection switch 75 fixed at such a position, one portion D1 sandwiching the step 79f of the lever portion 79c of the operating lever 79 is closer to the other portion D2. That is, the height position of the part D1 is higher than the height position of the part D2.
- the movable piece 753 When the tip portion of the movable piece 753 is in contact with the portion D1, the movable piece 753 is pressed and the tip portion comes into contact with the second conductive portion 752b on the substrate 751, and the switching state of the dead zone detection switch 75 is changed. Turns on. On the other hand, when the tip of the movable piece 753 is in contact with the portion D2, the tip of the movable piece 753 is separated from the second conductive portion 752b on the substrate 751, and the switching state of the dead zone detection switch 75 is OFF. become.
- the arrangement relationship between the reverse operation region detection switch 76 and the second gear 72 is the same as the arrangement relationship described in the first embodiment, and a description thereof will be omitted.
- the opening / closing operation of the window glass W and the operation of the sandwiching detection unit 6 are the same as the operations described in the first embodiment, and therefore the description thereof is omitted.
- the operation part different from the first embodiment, specifically, the operation of the position detection unit 7 will be described.
- FIG. 30 is a front view illustrating an arrangement relationship between the lever driving gear 78 and the operating lever 79 when the open / close position of the window glass W is the fully open position.
- the lever driving gear 78 is disposed with respect to the operating lever 79 so that the rotation position of the tooth portion 78a is the rotation position indicated by the region T in FIG. The In this rotational position, the tooth portion 78a of the lever drive gear 78 does not mesh with the gear portion 79b of the operating lever 79.
- the first gear 71 rotates in the X direction in FIG. 30 from the arrangement state shown in FIG.
- the second gear 72 rotates in the X ′ direction opposite to the X direction.
- the lever driving gear 78 also rotates in the X ′ direction. Due to the rotation of the lever driving gear 78, the tooth portion 78a also rotates in the X 'direction.
- the opening / closing position of the window glass W reaches the dead zone start position (position represented by the line R in FIG. 13)
- the tooth portion 78a reaches the rotational position as indicated by the area T in FIG. To do.
- the tooth portion 78a starts to mesh with the gear portion 79b of the operating lever 79.
- FIG. 31 is a side view showing a contact state between the operating lever 79 and the dead zone detection switch 75 when the tooth portion 78a of the lever driving gear 78 is rotating in the above rotation range.
- the movable piece 753 of the dead zone detection switch 75 is in contact with the portion D1 having a high height position across the step 79f of the lever portion 79c of the operating lever 79, and receives a pressing force from this portion. In contact with the second conductive portion 752b. Therefore, when the opening / closing position of the window glass W belongs to the region between the fully open position and the dead zone start position, that is, when the opening / closing position of the window glass W does not belong to the dead zone, the dead zone detection switch 75 The switching state is the ON state.
- FIG. 33 is a front view showing the positional relationship between the lever driving gear 78 and the operating lever 79 when the operating lever 79 rotates.
- FIG. 34 is a diagram showing the positional relationship between the operating lever 79 and the dead zone detection switch 75 when the operating lever 79 is rotating
- FIG. 35 is a sectional view taken along XXXV-XXXV in FIG.
- the movable piece 753 of the dead zone detection switch 75 abuts the portion D2 having a low position in the height direction across the step 79f of the actuating lever 79. At the same time, it is separated from the second conductive portion 752b. Therefore, the switching state of the dead zone detection switch 75 is turned off.
- the window glass W is further closed from the dead zone start position, that is, the opening / closing position of the window glass W is a position belonging to the dead zone area. Therefore, when the opening / closing position of the window glass W is a position belonging to the dead zone, the switching state of the dead zone detection switch 75 is OFF.
- the operating lever 79 when the opening / closing position of the window glass W is a position that does not belong to the dead zone, the operating lever 79 does not engage the lever drive gear 78 (rotating member), and the dead zone detection switch 75 The switching state is turned on. Further, when the opening / closing position of the window glass W is a position belonging to the dead zone, the operating lever 79 is engaged with the lever driving gear 78, and the switching state of the dead zone detection switch 75 is turned off. Therefore, based on the switching state of the dead zone detection switch 75, it is detected whether the opening / closing position of the window glass W is a position belonging to the dead zone.
- the operation lever 79 is used as a detection member for changing the switching state of the dead zone detection switch 75.
- the operating lever 79 is a separate member from the rotating member (the first gear 71, the second gear 72, and the lever driving gear 78), and can increase the operating stroke without being affected by the size of the rotating member. Since the operation stroke can be increased, even if a slight deviation occurs in the arrangement of the operation lever 79 and the dead zone detection switch 75, the detection error in the specific position area based on the deviation can be reduced. it can. Therefore, it is possible to sufficiently suppress deterioration in detection accuracy without strictly managing the shape of the operating lever 79 and the arrangement relationship between the operating lever 79 and the dead zone detection switch 75.
- a tooth portion is formed on the gear portion 79b of the operating lever 79.
- the rotating member that is rotationally driven by the rotation of the output shaft 3 is supported by the first gear 71 supported so as to be integrally rotatable with the output shaft 3 and the first support pin 771 so as to be able to mesh with the first gear 71.
- the second gear 72 that reduces the rotation of the first gear 71 and the first support pin 771 so as to rotate integrally with the second gear 72 are formed on the gear portion 79b of the operating lever 79 at a part of the outer periphery.
- a lever drive gear 78 (third gear) having a tooth portion 78a that can mesh with the tooth portion.
- the tooth portion 78a formed on the lever driving gear 78 does not mesh with the tooth portion formed on the gear portion 79b of the operating lever 79 when the opening / closing position of the window glass W is not in the dead zone region.
- the open / close position is a position belonging to the dead zone, it is formed at a rotational position so as to mesh with a tooth portion formed on the gear portion 79b of the operating lever 79.
- the operating lever 79 is rotated by the rotational driving force of the output shaft 3 transmitted through the lever driving gear 78 when the tooth portion meshes with the tooth portion 78 a formed on the lever driving gear 78. With this configuration, the rotational driving force of the output shaft 3 is reliably transmitted to the operating lever 79 via the lever driving gear 78, the second gear 72, and the first gear 71.
- the position detection unit 7 further includes a restraining spring 74 that elastically positions the rotational position of the operating lever 79.
- the operating lever 79 is restrained by the rotational driving force of the output shaft 3 when meshed with the lever driving gear 78.
- the spring 74 rotates against the elastic force generated by the spring 74. As a result, the operation lever 79 is more reliably rotated.
- an arm type window regulator device is illustrated, but a cable type other window regulator device may be used.
- the moment acting on the output shaft does not change depending on the rotational position of the lift arm. Therefore, since erroneous detection of pinching due to a change in moment does not occur, the cam 72a on the second gear 72 and the reverse operation region detection switch 76 provided for preventing malfunction due to this erroneous detection can be omitted. .
- the window regulator device for opening and closing the window glass provided on the side window of the vehicle is exemplified, but the present invention is used as an automatic opening and closing device for other window glass such as the window glass provided on the roof window of the vehicle.
- the window regulator device according to the invention can be applied.
- the present invention can be modified without departing from the spirit of the present invention.
Landscapes
- Power-Operated Mechanisms For Wings (AREA)
- Window Of Vehicle (AREA)
Abstract
Description
特開平11-101058号公報に記載のウィンドレギュレータ装置によれば、窓ガラスの開閉位置が不感帯領域であるか否かを検知するためのカム部材が出力軸に連結された回転部材(ピニオンギヤ)の内周側に形成されている。このピニオンギヤは、特開平11-101058号公報の図2または図4からわかるようにハウジング内にて駆動ギヤに隣接して配置されるので、スペース上の制約が大きい。そのため、ピニオンギヤは小さい部材である。そして、このピニオンギヤの内周側に形成されるカムも小さい部材である。このような微小なカム部材を用いて窓ガラスの開閉位置が不感帯領域に属する位置であるか否かを検知する場合、わずかな組み付け誤差により検知精度が大きく悪化するおそれがある。また、検知精度の悪化を防止するために、カム部材の形状およびピニオンギヤの取り付け角度を厳密に管理した場合には、製造コストおよび組み付けコストが増大する。
本発明は、動力源と、前記動力源に連結され前記動力源が発生する動力により回転する出力軸と、前記出力軸の回転駆動力により車両の窓ガラスが開閉するように前記出力軸の回転駆動力を窓ガラスに伝達する駆動力伝達機構と、窓ガラスの開閉位置が予め定められる開閉位置領域である特定位置領域に属する位置であるか否かを検知する開閉位置検知手段とを備えるウィンドレギュレータ装置を開示する。前記開閉位置検知手段は、前記出力軸の回転駆動力により回転する回転部材と、窓ガラスの開閉位置が前記特定位置領域に属しない位置であるときに前記回転部材に係合せず、窓ガラスの開閉位置が前記特定位置領域に属する位置であるときに前記回転部材に係合し、係合時に前記回転部材を介して伝達される前記出力軸の回転駆動力により回転作動する作動レバーと、前記作動レバーの回転作動に基づいて切り換え作動する特定位置領域検知スイッチと、を備える。
以下、本発明の第1実施形態について説明する。図1は、本実施形態に係るウィンドレギュレータ装置の全体構成を示す正面図である。このウィンドゥレギュレータ装置は車両のサイドウィンドウに設けられる窓ガラスを開閉する。図1に示されるようにウィンドレギュレータ装置は駆動機構1と駆動力伝達機構9を備える。駆動機構1は、窓ガラスを開閉作動させるための動力源としての電気モータ2と、出力軸3と、電気モータ2に連結されたハウジング8と、ハウジング8に収容された図示しない検知ユニットを備える。電気モータ2は例えば車載バッテリなどの電源に電気的に接続され、電源からの電力供給により回転駆動力を発生する。出力軸3は電気モータ2が発生する回転駆動力により回転する。駆動力伝達機構9は、出力軸3の回転駆動力によって窓ガラスWが図の矢印により示される上下方向に開閉作動するように、出力軸3の回転駆動力を窓ガラスWに伝達する。ハウジング8内に収納された検知ユニットは、窓ガラスWの閉作動中に窓ガラスWと窓枠との間に異物が挟み込まれたか否か、および、窓ガラスWの開閉位置が予め定められている特定の開閉位置領域(特定位置領域)に属する位置であるか否か、を検知する。

次に、本発明の第2実施形態について説明する。本実施形態のウィンドレギュレータ装置は、位置検知ユニット以外の構成が上記第1実施形態にて説明した構成とほぼ同一である。したがって、第1実施形態と同一の構成については第1実施形態を参照することとしてその説明を省略し、以下、異なる構成を中心に説明する。
Claims (6)
- 動力源と、前記動力源に連結され前記動力源が発生する動力により回転する出力軸と、前記出力軸の回転駆動力により車両の窓ガラスが開閉するように前記出力軸の回転駆動力を窓ガラスに伝達する駆動力伝達機構と、窓ガラスの開閉位置が予め定められる開閉位置領域である特定位置領域に属する位置であるか否かを検知する開閉位置検知手段とを備えるウィンドレギュレータ装置であって、
前記開閉位置検知手段が、
前記出力軸の回転駆動力により回転する回転部材と、
窓ガラスの開閉位置が前記特定位置領域に属しない位置であるときに前記回転部材に係合せず、窓ガラスの開閉位置が前記特定位置領域に属する位置であるときに前記回転部材に係合し、係合時に前記回転部材を介して伝達される前記出力軸の回転駆動力により回転作動する作動レバーと、
前記作動レバーの回転作動に基づいて切り換え作動する特定位置領域検知スイッチと、を備えるウィンドレギュレータ装置。 - 請求項1に記載のウィンドレギュレータ装置において、
前記回転部材は、前記出力軸に一体回転可能に支持された第1歯車と、前記第1歯車に噛合し、前記第1歯車の回転を減速するとともに、前記作動レバーに係合可能な係合部材が取り付けられた第2歯車を有し、
前記係合部材は、窓ガラスの開閉位置が前記特定位置領域に属しない位置であるときに前記作動レバーに係合せず、窓ガラスの開閉位置が前記特定位置領域に属する位置であるときに前記作動レバーに係合するように、前記第2歯車に配置され、
前記作動レバーは、前記係合部位との係合時に前記第2歯車を介して伝達される前記出力軸の回転駆動力により回転作動する、ウィンドレギュレータ装置。 - 請求項2に記載のウィンドレギュレータ装置において、
前記作動レバーは、前記出力軸に相対回転可能に支持されているとともに連結ピンを介して前記第2歯車に連結されている、ウィンドレギュレータ装置。 - 請求項3に記載のウィンドレギュレータ装置において、
前記開閉位置検知手段は、前記作動レバーを一方の回転方向に付勢する付勢部材と、前記付勢部材の付勢力による前記作動レバーの回転を規制することにより前記作動レバーの回転位置を位置決めする位置決め部材とをさらに備える、ウィンドレギュレータ装置。 - 請求項1に記載のウィンドレギュレータ装置において、
前記作動レバーには歯部が形成され、
前記回転部材は、前記出力軸に一体回転可能に支持された第1歯車と、前記第1歯車に噛合可能となるように支持ピンにより支持され前記第1歯車の回転を減速する第2歯車と、前記第2歯車と一体的に回転するように前記支持ピンにより支持され外周の一部分に前記作動レバーの歯部に噛合可能な歯部が形成された第3歯車とを有し、
前記第3歯車に形成された歯部は、窓ガラスの開閉位置が前記特定位置領域に属しない位置であるときには前記作動レバーに形成された歯部と噛合せず、窓ガラスの開閉位置が前記特定位置領域に属する位置であるときには前記作動レバーに形成された歯部と噛合するような位置に形成され、
前記作動レバーは、その歯部が前記第3歯車に形成された歯部と噛合したときに前記第3歯車を介して伝達される前記出力軸の回転駆動力により回転作動する、ウィンドレギュレータ装置。 - 請求項5に記載のウィンドレギュレータ装置において、
前記開閉位置検知手段は前記作動レバーの回転位置を弾性的に位置決めする弾性部材を更に備え、前記作動レバーは、前記第3歯車と噛合したときに、前記出力軸の回転駆動力により前記弾性部材が発生する弾性力に抗して回転作動する、ウィンドレギュレータ装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/497,672 US8726573B2 (en) | 2009-09-29 | 2010-09-15 | Window regulator device |
| IN2636DEN2012 IN2012DN02636A (ja) | 2009-09-29 | 2010-09-15 | |
| CN2010800433563A CN102575493B (zh) | 2009-09-29 | 2010-09-15 | 车窗升降装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009-224346 | 2009-09-29 | ||
| JP2009224346A JP4947322B2 (ja) | 2009-09-29 | 2009-09-29 | ウィンドレギュレータ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2011040245A1 true WO2011040245A1 (ja) | 2011-04-07 |
Family
ID=43826071
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2010/065970 WO2011040245A1 (ja) | 2009-09-29 | 2010-09-15 | ウィンドレギュレータ装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8726573B2 (ja) |
| JP (1) | JP4947322B2 (ja) |
| CN (1) | CN102575493B (ja) |
| IN (1) | IN2012DN02636A (ja) |
| WO (1) | WO2011040245A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6583075B2 (ja) * | 2016-03-17 | 2019-10-02 | 株式会社デンソー | クラッチ、モータ及びパワーウインド装置 |
| JP6682345B2 (ja) * | 2016-05-12 | 2020-04-15 | シロキ工業株式会社 | ウインドレギュレータ |
| CN110491239B (zh) * | 2019-08-15 | 2021-07-02 | 合肥威艾尔智能技术有限公司 | 一种通用舱门手动开启模拟装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3217048B2 (ja) * | 1994-05-11 | 2001-10-09 | アスモ株式会社 | パワーウインド装置 |
| JP3713792B2 (ja) * | 1996-02-29 | 2005-11-09 | アイシン精機株式会社 | パワーウインドレギュレータ装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03217048A (ja) | 1990-01-22 | 1991-09-24 | Hitachi Ltd | 接合部用伝熱材料 |
| CN1187568A (zh) | 1996-10-02 | 1998-07-15 | 三星自动车株式会社 | 用于车窗玻璃升降的装置及方法 |
| JPH11101058A (ja) | 1997-09-25 | 1999-04-13 | Jeco Co Ltd | 電動式窓開閉装置の位置検出装置 |
| JPH11256920A (ja) * | 1998-03-13 | 1999-09-21 | Koito Mfg Co Ltd | 安全装置付パワーウインド装置 |
| EP1250507B1 (en) * | 2000-01-19 | 2006-10-18 | Stoneridge Control Devices, Inc. | Electro-mechanical actuator |
| CN102575496B (zh) * | 2009-09-29 | 2013-11-20 | 爱信精机株式会社 | 车窗玻璃升降装置 |
-
2009
- 2009-09-29 JP JP2009224346A patent/JP4947322B2/ja not_active Expired - Fee Related
-
2010
- 2010-09-15 IN IN2636DEN2012 patent/IN2012DN02636A/en unknown
- 2010-09-15 WO PCT/JP2010/065970 patent/WO2011040245A1/ja active Application Filing
- 2010-09-15 US US13/497,672 patent/US8726573B2/en not_active Expired - Fee Related
- 2010-09-15 CN CN2010800433563A patent/CN102575493B/zh not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3217048B2 (ja) * | 1994-05-11 | 2001-10-09 | アスモ株式会社 | パワーウインド装置 |
| JP3713792B2 (ja) * | 1996-02-29 | 2005-11-09 | アイシン精機株式会社 | パワーウインドレギュレータ装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102575493B (zh) | 2013-12-25 |
| JP2011074589A (ja) | 2011-04-14 |
| US20120192491A1 (en) | 2012-08-02 |
| CN102575493A (zh) | 2012-07-11 |
| JP4947322B2 (ja) | 2012-06-06 |
| US8726573B2 (en) | 2014-05-20 |
| IN2012DN02636A (ja) | 2015-09-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2011040246A1 (ja) | ウィンドレギュレータ装置 | |
| US7536993B2 (en) | Throttle devices for internal combustion engines | |
| JP4600250B2 (ja) | 車両用ドアクローザ装置 | |
| US11060328B2 (en) | Latching device for automotive applications | |
| WO2011040245A1 (ja) | ウィンドレギュレータ装置 | |
| EP1471200A2 (en) | An opening-closing device for an opening-closing member of a vehicle | |
| JP5466512B2 (ja) | ウィンドレギュレータおよびパワーウィンド装置 | |
| JP5184012B2 (ja) | 車両用自動開閉装置 | |
| JP3913658B2 (ja) | 電磁クラッチ付モータ | |
| CN112639270B (zh) | 节气装置 | |
| US11975635B2 (en) | Gear device | |
| US20230323943A1 (en) | Gear device | |
| JP2011074579A (ja) | スライドドア自動開閉装置 | |
| JP5195704B2 (ja) | ウィンドレギュレータ装置 | |
| JP5195705B2 (ja) | 電気モータの駆動回路およびウィンドレギュレータ装置。 | |
| JP4851885B2 (ja) | 開閉体の駆動装置 | |
| JP5397620B2 (ja) | ウィンドウレギュレータ装置 | |
| JP4747796B2 (ja) | 車両用ドアクローザ装置 | |
| JP2016104951A (ja) | 車両用ドアロック装置 | |
| US7805887B2 (en) | Open/close member driving apparatus | |
| JP4036332B2 (ja) | 車両用開閉体の開閉装置におけるケーブル案内部材 | |
| JPH03153949A (ja) | アクチュエータ | |
| KR101440718B1 (ko) | 자동차용 도어 개폐장치 | |
| JP2024110629A (ja) | 車両用ドアロック装置 | |
| JP5602406B2 (ja) | 車両用自動開閉装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201080043356.3 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 10820364 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13497672 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2636/DELNP/2012 Country of ref document: IN |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 10820364 Country of ref document: EP Kind code of ref document: A1 |