WO2009145166A1 - 無人搬送装置とその搬送経路決定方法 - Google Patents
無人搬送装置とその搬送経路決定方法 Download PDFInfo
- Publication number
- WO2009145166A1 WO2009145166A1 PCT/JP2009/059566 JP2009059566W WO2009145166A1 WO 2009145166 A1 WO2009145166 A1 WO 2009145166A1 JP 2009059566 W JP2009059566 W JP 2009059566W WO 2009145166 A1 WO2009145166 A1 WO 2009145166A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- route
- transfer
- transport
- branch
- point
- Prior art date
Links
- 238000012546 transfer Methods 0.000 title claims abstract description 62
- 238000000034 method Methods 0.000 title claims abstract description 39
- 238000005265 energy consumption Methods 0.000 claims description 20
- 238000004891 communication Methods 0.000 abstract description 6
- 238000010586 diagram Methods 0.000 description 9
- 230000005540 biological transmission Effects 0.000 description 3
- 238000000926 separation method Methods 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000010187 selection method Methods 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0217—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with energy consumption, time reduction or distance reduction criteria
Definitions
- the present invention relates to an unmanned transport apparatus that automatically determines a transport path and a transport path determination method thereof.
- Patent Documents 1 to 7 Various proposals have already been made as means for determining a conveyance path in an unmanned conveyance apparatus using a plurality of conveyance devices (for example, Patent Documents 1 to 7).
- Japanese Patent Application Laid-Open No. 6-83445 “Driving route selection method in unmanned conveyance system by automatic traveling moving body” JP 2003-337623 A, “Route determination apparatus and method” Japanese Patent Application Laid-Open No. 2003-345439, “Automatic transport system and route search method for transport vehicle” Japanese Patent No. 3485755, “Automated guided vehicle control device and automatic guided vehicle control method” Japanese Patent No. 3539838, “Automated guided vehicle control device and automatic guided vehicle control method” Japanese Patent No. 3755268, “Automated guided vehicle control device and automatic guided vehicle control method” Japanese Patent No. 3728864, “Automated guided vehicle control device and method”
- the transfer route determination method in the conventional automatic transfer apparatus described above can be roughly divided into the following three types.
- (1) Manually define the route corresponding to the transport source and transport destination to be transported. In this method, it is necessary to manually set all combinations corresponding to the transport source and the transport destination. Further, the route thus determined is a fixed route, and there is a limit to flexibly cope with a route state such as a failure or a traffic jam.
- (2) The transport route is regarded as a graph, and the route having the smallest weight is determined. In this method, it is necessary to monitor the detailed position and transit time of the transport device in order to recalculate the weight, and a sensor, a communication path, and a calculation device for obtaining information on various devices are necessary.
- a plurality of routes corresponding to the transport source and transport destination to be transported are prepared, and the optimum route is selected from the routes.
- determination is made based on the congestion of the current route and the prediction of the congestion of the future route. For this reason, accurate prediction is required, and if congestion prediction fails, the route will be transported along a route based on an incorrect prediction, and thus an appropriate route will not be passed.
- the evaluation criteria of the optimal route are the conveyance time and distance, and energy saving is not considered.
- the present invention was created to solve the above-described conventional problems. That is, the object of the present invention is to automatically determine the transport route, and it is not necessary to monitor the detailed position and transit time of the transport device, and no sensor, communication path, and calculation device are required for that purpose. It is an object of the present invention to provide an unmanned transport device and a transport route determination method that can select an appropriate route even if the congestion prediction fails and can save energy.
- an unmanned conveyance device that individually controls a plurality of conveyance devices, A plurality of device control devices that control each transport device, a transport control device that searches for a route and transmits an instruction to each device control device, and a storage device that stores a transport device state, a transport route graph, and a planned route,
- the storage device is a transfer point, a branch point, a junction point, a transfer source, and a transfer destination of a transfer device as “points”, “branches” from each point to an adjacent point that can be moved directly, and is proportional to the transit time of each branch.
- the transport control device determines, for each article, a route that minimizes the sum of the weights of the branches that form the transport route from the transport source to the transport destination as a “scheduled route”, and each branch of the determined planned route. Add a predetermined weight to the current weight of For each article, the article is conveyed by individually controlling the conveying device along the determined planned route, and the predetermined weight is subtracted from the current weight of each branch of the conveyed planned route.
- An unmanned transfer device is provided.
- a transport route determination method for an unmanned transport apparatus that individually controls a plurality of transport devices, With storage device, transfer point, branch point, junction point, transport source, transport destination of transport equipment are “points”, “branches” from each point to adjacent points that can be moved directly, “time” proportional to the transit time of each branch A graph with the sum of “load” and “energy load” proportional to energy consumption as “weight” is stored, For each article, the path that minimizes the sum of the weights of the branches that constitute the transport path from the transport source to the transport destination is determined as the “scheduled path” for each article, and each branch of the determined planned path is determined.
- the article is conveyed by individually controlling the conveying device along the determined planned route, and the predetermined weight is subtracted from the current weight of each branch of the conveyed planned route.
- the predetermined weight is set as a “time load” corresponding to one article, and passes through a device with relatively large energy consumption when the transport load falls below a certain threshold value.
- the “energy load” of the branch to be set is set to be large, and some devices in the entire route are substantially stopped.
- the route with the least energy consumption is selected from the routes.
- the predetermined weight is subtracted from the current weight of each branch of the current “scheduled route”, and then a conveyance path from the current point to the conveyance destination is configured.
- the route having the smallest sum of the weights of the respective branches is re-determined as a “scheduled route”, and the predetermined weight is added to the current weight of each branch of the determined planned route.
- a transfer point, a branch point, a junction point, a transfer source, and a transfer destination of a transfer device are “points”, and from each point to an adjacent point that can be moved directly, “branches” Stores a graph with the sum of “time load” proportional to transit time and “energy load” proportional to energy consumption as “weight”, and configures the transport path from the transport source to the transport destination for each article. Since the route with the smallest sum of the weights of the branches is determined as a “planned route”, the weight of each branch of the determined planned route is added to the current weight.
- the route with the smallest sum of weights is redetermined as a “planned route”, and the weights of each branch of the determined planned route are added to the current weight.
- the transport route can be reviewed and the route updated. Therefore, it is possible to always select the route with the latest route information, and return to an appropriate route in the middle of conveyance even if the future congestion prediction fails and an inappropriate route is selected. This also eliminates the need for highly accurate prediction.
- the predetermined weight is set as “time load” corresponding to one article, and “energy load” of a branch passing through a device with relatively large energy consumption when there is no light load or when it is not necessary to carry it quickly. Is set to a large value, and some devices in all routes are substantially stopped. Therefore, energy saving at light load can be realized by stopping the devices.
- the apparatus can wait for some energy, but can further save energy.
- FIG. 1 is an overall configuration diagram of an unmanned conveyance device of the present invention. It is a figure which shows the example of a conveyance route graph. It is the figure which attached the weight to FIG. It is the figure which changed the weight of FIG. It is a figure which shows 1st Embodiment of the method of this invention. It is a figure which shows 1st Embodiment of the method of this invention. It is a figure which shows 2nd Embodiment of the method of this invention. It is a figure which shows 2nd Embodiment of the method of this invention. It is a figure which shows 2nd Embodiment of the method of this invention. It is a figure which shows 3rd Embodiment of the method of this invention. It is a figure which shows 3rd Embodiment of the method of this invention. It is a figure which shows 3rd Embodiment of the method of this invention. It is a figure which shows 3rd Embodiment of the method of this invention. It is a figure which shows 3r
- FIG. 1 is an overall configuration diagram of the automatic transfer device of the present invention.
- an unmanned conveyance device 10 of the present invention includes a plurality of device control devices 12 that control a plurality of conveyance devices 11, a device instruction transmission unit 13 that transmits instructions to each device control device 12, and a conveyance instruction from a host device 14.
- the apparatus instruction transmission unit 13, the conveyance instruction reception unit 15, and the route search unit 16 described above constitute a conveyance control device 18 as a whole.
- the transport control device 18 is, for example, a single computer or a plurality of computers.
- the storage devices 17a, 17b, 17c, and 17d described above may be a single storage device 17.
- an instruction for conveying an article (movement destination, movement priority, etc.) is given from the host apparatus 14 to the conveyance instruction receiving unit 15.
- the route search unit 16 reflects the state 17a (failure information or the like) of the transport device in the transport route graph 17b.
- the route search unit 16 evaluates the weight on the transport route graph 17b and generates a transport route.
- the device instruction transmission unit 13 issues a conveyance instruction to each control device 12 according to the generated conveyance path.
- FIG. 2 is a diagram illustrating an example of a transport path graph.
- the conveyance path is configured by a combination of various types of conveyance devices such as an overhead traveling carriage (OHV), an automatic guided vehicle (RGV), and an automatic crane.
- a combination of these transfer devices is expressed by a transfer route graph 1 (hereinafter simply referred to as “graph”).
- the graph 1 is constituted by a set of “points” 2 and “branches” 3 connecting the adjacent points.
- the branches can have a direction.
- point 2 is a rectangle and branch 3 is indicated by an arrow.
- In order to represent the route composed of transport equipment (A to D in this figure) in a graph all the transfer points, branch points, junction points, transport source points, and transport destination points of each device Is defined.
- a “branch” is defined from each point to an adjacent point that can be moved directly. Depending on the device, there are a case where it can move in both directions and a case where it can move only in one direction, which is defined as the “branch direction”.
- FIG. 3 is a diagram in which weight 4 is added to FIG.
- a weight 4 is defined for each branch 3, and a route that minimizes the sum of the weights 4 of the branches that constitute the transport route is defined as the “best route”.
- the weight 4 is an arbitrary numerical value.
- FIG. 4 is a diagram in which the weight of FIG. 3 is changed.
- the same route is always obtained with a fixed weight, so it is possible to obtain a route that detours even if a specific part of the route is congested. Can not. Therefore, it is necessary to dynamically change the weight 4 corresponding to the traffic jam. For example, in FIG. 3, considering transport from “departure point A to arrival point C”, “A ⁇ C” is usually determined as the “best route”, but there is traffic jam between “A ⁇ C”. When the weight between “A ⁇ C” is increased as shown in FIG. 4 when it occurs, “A ⁇ B ⁇ D ⁇ C” is obtained as the “best route”. This route is a detour route for traffic jams.
- the weight is dynamically changed by the following method without acquiring actual values of route congestion and travel time.
- the storage device 17 previously stores transfer points, branch points, junction points, transfer sources, and transfer destinations of transfer devices as “points”, and “branches” from each point to an adjacent point that can be moved directly.
- a graph in which the sum of “time load” proportional to time and “energy load” proportional to consumed energy is set as “weight” is stored.
- the conveyance control device 18 determines, for each article, a route that minimizes the sum of the weights of the branches that constitute the conveyance route from the conveyance source to the conveyance destination as a “scheduled route”.
- a predetermined weight is added to the current weight of each branch of the planned route.
- the predetermined weight is, for example, a weight corresponding to one article. That is, when the transport route is obtained, a reservation is made in each branch 3 constituting the route as a scheduled route.
- FIG. 5A and 5B are diagrams showing a first embodiment of the method of the present invention.
- FIG. 5A shows a high load
- FIG. 5B shows a low load.
- the conveyance path is configured by a combination of various types of conveyance devices such as an overhead traveling carriage (OHV), an automatic guided vehicle (RGV), and an automatic crane.
- OCV overhead traveling carriage
- RUV automatic guided vehicle
- multiple transport devices and routes are prepared to allow sufficient capacity even when there are many loads to be transported and when the load is high, or when some devices fail.
- a load is low with a low load
- energy is saved by stopping the function of the device by transporting such a redundant device through a route that does not use it. That is, as shown in FIG.
- the route “D ⁇ E” when the route “D ⁇ E” is achieved by a plurality of routes (two in this figure), both routes are used at high load, but as shown in FIG.
- the “energy load” of the branch passing through the device with relatively large energy consumption is larger than the “energy load” when passing through the device with relatively low energy consumption.
- it is set to be twice or more, and some devices in all the routes are substantially stopped.
- the “best route” is a “route with a short transit time and low energy consumption”.
- Weight "time load” proportional to the transit time of each branch + “energy load” proportional to energy consumption
- the “best route” is a “route with a short transit time and low energy consumption”.
- the contribution of the item “energy consumption” is relatively large, so a route that passes through a device with low “energy consumption” is selected.
- the “route passage time” increases, and the contribution of the term “energy consumption” becomes relatively small. For this reason, equipment with a large “energy consumption” is also used to reduce the load.
- FIG. 6A to 6C are diagrams showing a second embodiment of the method of the present invention.
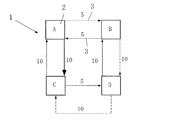
- the weight of each branch is “time load” proportional to the transit time of each branch + “energy load” proportional to consumed energy, and is represented by two numbers in the figure, for example, 10 + 100. ing.
- the energy load is not changed.
- FIG. 6A shows the case of first transporting from “departure point A to arrival point C”. At this time, “A ⁇ B ⁇ D ⁇ C” that minimizes the sum of the weights of the branches is selected from the two transport paths “A ⁇ C” and “A ⁇ B ⁇ D ⁇ C”.
- FIG. 6B shows a case where the transfer is second from “departure point A to arrival point C”. Also at this time, “A ⁇ C” (branch AC) that minimizes the sum of the weights of the branches is selected.
- This selection reserves the branches AB, BD, and DC, and changes the weights of the branches AB, BD, and DC to 15 + 20, 30 + 20, and 30 + 20.
- FIG. 6C shows the case of the third transfer from “departure point A to arrival point C”.
- a ⁇ C that minimizes the sum of the weights of the branches is selected from the two transport paths “A ⁇ C” and “A ⁇ B ⁇ D ⁇ C”. This selection reserves the branch AC and changes the weight of the branch AC to 40 + 100, respectively. The weight 4 of each branch is sequentially subtracted when the reserved branch is actually passed.
- FIG. 7 is a diagram showing a third embodiment of the method of the present invention.
- reference numeral 7 denotes a device having a buffer, and it is assumed that a certain waiting time (for example, processing time: 10 minutes) always occurs.
- a certain waiting time for example, processing time: 10 minutes
- a plurality of route candidates are prepared in advance and selected from them.
- the traffic route is avoided by expressing the transport route in a graph and reflecting the route traffic in the weight.
- the present invention not only a route reflecting the current route state when a transport instruction is issued and instructed to the transport device, but also a plurality of transport destinations such as transfer points / separation points of the transport device is provided.
- the route is obtained again with the latest route state at the location where the route can be taken. That is, according to the present invention, each time an article moves from point to point, the predetermined weight is subtracted from the current weight of each branch of the current “scheduled route”, and then the destination is transferred from the current point.
- the route having the smallest sum of the weights of the branches constituting the transport route up to is determined again as a “scheduled route”, and the predetermined weight is added to the current weight of each branch of the determined planned route.
- FIG. 8A and FIG. 8B are diagrams showing a reconsideration of the conveyance path, which is the fourth embodiment of the method of the present invention.
- Fig. 8A when the route is obtained with the route condition when the transport instruction is issued, there is no traffic jam and it tries to pass between FH. Congestion occurs due to simultaneous use. Therefore, as shown in FIG. 8B, an avoidance route that is not congested can be obtained by reexamining the route at the separation point E.
- a transfer point, a branch point, a junction point, a transfer source, and a transfer destination of a transfer device are “points”, and “branches” are connected from each point to an adjacent point that can be moved directly.
- a graph that stores the “weight” as the sum of “time load” proportional to the passage time and “energy load” proportional to consumed energy is stored, and a transport path from the transport source to the transport destination is configured for each article. Since the route with the smallest sum of the weights of each branch is determined as a “planned route”, the weight of each branch of the determined planned route is added to the current weight.
- the route that minimizes the sum of the weights of each branch is redetermined as a “planned route”, and the weight of each branch of the determined planned route is added to the current weight.
- the transport route can be reviewed and the route updated. Therefore, it is possible to always select the route with the latest route information, and return to an appropriate route in the middle of conveyance even if the future congestion prediction fails and an inappropriate route is selected. This also eliminates the need for highly accurate prediction.
- the predetermined weight is set as “time load” corresponding to one article, and “energy load” of a branch passing through a device with relatively large energy consumption when there is no light load or when it is not necessary to carry it quickly. Is set to a large value, and some devices in all routes are substantially stopped. Therefore, energy saving at light load can be realized by stopping the devices.
- the apparatus can wait for some energy, but can further save energy.
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
搬送経路を自動決定することができ、搬送機器の詳細な位置や通過時間を監視する必要がなく、そのためのセンサ、通信路、および計算装置が不要であり、精度の高い予測が不要であり、混雑予測に失敗しても適切な経路を選択することができ、かつ省エネルギー化を図ることができる無人搬送装置と その搬送経路決定方法を提供する。 記憶装置(17)により、搬送機器(11)の乗り換え地点、分岐地点、合流地点、搬送元、搬送先を「点」(2)、各点から直接移動できる隣接地点までを「枝」(3)、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」(4)とするグラフ(1)を記憶し、搬送制御装置(18)により、各物品毎に、搬送元から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として決定し、決定した予定経路の各枝の現在の重み(4)に所定の重みを加算し、各物品毎に、決定した予定経路に沿って搬送機器を個別に制御して物品を搬送し、かつ搬送した予定経路の各枝の現在の重みから前記所定の重みを減算する。
Description
本発明は、搬送経路を自動決定する無人搬送装置とその搬送経路決定方法に関する。
複数の搬送機器を用いた無人搬送装置において、搬送経路を決定する手段として、種々の提案が既になされている(例えば、特許文献1~7)。
上述した従来の無人搬送装置における搬送経路決定方法は、以下の3通りに大別することができる。
(1) 搬送対象の搬送元と搬送先に対応した経路を手動で定義する。
この方法は、搬送元と搬送先に対応した全ての組み合わせを手動で設定する必要があった。また、そのように決定した経路は固定された経路であり、故障や渋滞等の経路の状態に柔軟に対応することに限度があった。
(2) 搬送経路をグラフとみなし、重み最小となる経路を決定する。
この方法は、重みを再計算するために搬送機器の詳細な位置や通過時間を監視する必要があり、各種機器の情報を得るためのセンサ、通信路、および計算装置が必要であった。
(3) 搬送対象の搬送元と搬送先に対応した経路を複数用意し、その経路の中から最適な経路を選択する。
この方法は、渋滞等を回避した最短時間で移動できる経路を選択するために、現在の経路の混雑や未来の経路の混雑予測を元に決定している。そのため、精度の良い予測が必要であり、混雑予測に失敗すると誤った予測に基づいた経路で搬送してしまうため適切な経路を通過しない。また、最適な経路の評価基準は搬送時間や距離であり、省エネルギーについて考慮されていなかった。
(1) 搬送対象の搬送元と搬送先に対応した経路を手動で定義する。
この方法は、搬送元と搬送先に対応した全ての組み合わせを手動で設定する必要があった。また、そのように決定した経路は固定された経路であり、故障や渋滞等の経路の状態に柔軟に対応することに限度があった。
(2) 搬送経路をグラフとみなし、重み最小となる経路を決定する。
この方法は、重みを再計算するために搬送機器の詳細な位置や通過時間を監視する必要があり、各種機器の情報を得るためのセンサ、通信路、および計算装置が必要であった。
(3) 搬送対象の搬送元と搬送先に対応した経路を複数用意し、その経路の中から最適な経路を選択する。
この方法は、渋滞等を回避した最短時間で移動できる経路を選択するために、現在の経路の混雑や未来の経路の混雑予測を元に決定している。そのため、精度の良い予測が必要であり、混雑予測に失敗すると誤った予測に基づいた経路で搬送してしまうため適切な経路を通過しない。また、最適な経路の評価基準は搬送時間や距離であり、省エネルギーについて考慮されていなかった。
本発明は上述した従来の問題点を解決するために創案されたものである。すなわち、本発明の目的は、搬送経路を自動決定することができ、搬送機器の詳細な位置や通過時間を監視する必要がなく、そのためのセンサ、通信路、および計算装置が不要であり、精度の高い予測が不要であり、混雑予測に失敗しても適切な経路を選択することができ、かつ省エネルギー化を図ることができる無人搬送装置とその搬送経路決定方法を提供することにある。
本発明によれば、複数の搬送機器を個別に制御する無人搬送装置であって、
各搬送装置を制御する複数の機器制御装置と、経路を探索し各機器制御装置に指示を送信する搬送制御装置と、搬送機器状態、搬送経路グラフおよび予定経路を記憶する記憶装置とを備え、
前記記憶装置は、搬送機器の乗り換え地点、分岐地点、合流地点、搬送元、搬送先を「点」、各点から直接移動できる隣接地点までを「枝」、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするグラフを記憶し、
前記搬送制御装置は、各物品毎に、搬送元から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として決定し、決定した予定経路の各枝の現在の重みに所定の重みを加算し、
各物品毎に、決定した予定経路に沿って搬送機器を個別に制御して物品を搬送し、かつ搬送した予定経路の各枝の現在の重みから前記所定の重みを減算する、ことを特徴とする無人搬送装置が提供される。
各搬送装置を制御する複数の機器制御装置と、経路を探索し各機器制御装置に指示を送信する搬送制御装置と、搬送機器状態、搬送経路グラフおよび予定経路を記憶する記憶装置とを備え、
前記記憶装置は、搬送機器の乗り換え地点、分岐地点、合流地点、搬送元、搬送先を「点」、各点から直接移動できる隣接地点までを「枝」、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするグラフを記憶し、
前記搬送制御装置は、各物品毎に、搬送元から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として決定し、決定した予定経路の各枝の現在の重みに所定の重みを加算し、
各物品毎に、決定した予定経路に沿って搬送機器を個別に制御して物品を搬送し、かつ搬送した予定経路の各枝の現在の重みから前記所定の重みを減算する、ことを特徴とする無人搬送装置が提供される。
また、本発明によれば、複数の搬送機器を個別に制御する無人搬送装置の搬送経路決定方法であって、
記憶装置により、搬送機器の乗り換え地点、分岐地点、合流地点、搬送元、搬送先を「点」、各点から直接移動できる隣接地点までを「枝」、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするグラフを記憶し、
搬送制御装置により、各物品毎に、搬送元から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として決定し、決定した予定経路の各枝の現在の重みに所定の重みを加算し、
各物品毎に、決定した予定経路に沿って搬送機器を個別に制御して物品を搬送し、かつ搬送した予定経路の各枝の現在の重みから前記所定の重みを減算する、ことを特徴とする無人搬送装置の搬送経路決定方法が提供される。
記憶装置により、搬送機器の乗り換え地点、分岐地点、合流地点、搬送元、搬送先を「点」、各点から直接移動できる隣接地点までを「枝」、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするグラフを記憶し、
搬送制御装置により、各物品毎に、搬送元から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として決定し、決定した予定経路の各枝の現在の重みに所定の重みを加算し、
各物品毎に、決定した予定経路に沿って搬送機器を個別に制御して物品を搬送し、かつ搬送した予定経路の各枝の現在の重みから前記所定の重みを減算する、ことを特徴とする無人搬送装置の搬送経路決定方法が提供される。
本発明の好ましい実施形態によれば、前記所定の重みを、物品1台に相当する「時間負荷」とし、搬送負荷がある閾値以下になったときに、消費エネルギーの相対的に大きい機器を通過する枝の「エネルギー負荷」を大きく設定し、全経路中の一部の機器を実質的に停止させる。
また、搬送先で待ち時間が発生する場合に、搬送に必要な時間<=(搬送先の待ち時間)、又は搬送に必要な時間<=(搬送先の待ち時間+許容閾時間)、となる経路から最もエネルギー消費の少ない経路を選択する。
さらに、各物品が、点から点に移動する毎に、現在の「予定経路」の各枝の現在の重みから前記所定の重みを減算し、次いで現在の点から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として再決定し、決定した予定経路の各枝の現在の重みに前記所定の重みを加算する。
上記本発明の装置及び方法によれば、搬送機器の乗り換え地点、分岐地点、合流地点、搬送元、搬送先を「点」、各点から直接移動できる隣接地点までを「枝」、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするグラフを記憶し、各物品毎に、搬送元から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として決定し、決定した予定経路の各枝の重みを現在の重みに加算するので、
搬送経路をグラフとみなし、経路探索部で一旦決定した経路を将来の渋滞状態として重みに適用することで、渋滞になる経路を予測し、それを回避する経路を決定することができる。
また、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするので、省エネルギー化を図った経路を選択できる。
従って、故障や渋滞等の経路の状態に柔軟に対応するとともに、各種機器の重み計算に必要な情報を得るためのセンサ、通信路、計算装置などが不要になり、かつ省エネルギー化を図ることができる。
搬送経路をグラフとみなし、経路探索部で一旦決定した経路を将来の渋滞状態として重みに適用することで、渋滞になる経路を予測し、それを回避する経路を決定することができる。
また、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするので、省エネルギー化を図った経路を選択できる。
従って、故障や渋滞等の経路の状態に柔軟に対応するとともに、各種機器の重み計算に必要な情報を得るためのセンサ、通信路、計算装置などが不要になり、かつ省エネルギー化を図ることができる。
また、各物品が、点から点に移動する毎に、現在の「予定経路」の各枝の重みを現在の重みから減算し、次いで現在の点から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として再決定し、決定した予定経路の各枝の重みを現在の重みに加算するので、搬送経路の分離、合流、乗り換え等の地点に移動するたびに、搬送経路を再検討し経路を更新することができる。
従って、常に最新の経路情報で経路を選択するとともに、未来の混雑予測に失敗して適切でない経路を選んだとしても、搬送途中で適切な経路に戻ることができる。またこのため、高精度の予測が不要になる。
従って、常に最新の経路情報で経路を選択するとともに、未来の混雑予測に失敗して適切でない経路を選んだとしても、搬送途中で適切な経路に戻ることができる。またこのため、高精度の予測が不要になる。
さらに、前記所定の重みを、物品1台に相当する「時間負荷」とし、軽負荷時や急いで搬送する必要がないときには、消費エネルギーの相対的に大きい機器を通過する枝の「エネルギー負荷」を大きく設定し、全経路中の一部の機器を実質的に停止させるので、機器の停止により、軽負荷時の省エネルギーが実現できる。
また、搬送先で待ち時間が発生する場合に、搬送に必要な時間<=(搬送先の待ち時間)、又は搬送に必要な時間<=(搬送先の待ち時間+許容閾時間)、となる経路から最もエネルギー消費の少ない経路を選択することにより、装置に若干の待ちが発生するものの、さらに省エネルギーが可能になる。
以下、本発明の好ましい実施例を図面を参照して説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
図1は、本発明の無人搬送装置の全体構成図である。
この図において、本発明の無人搬送装置10は、複数の搬送装置11を制御する複数の機器制御装置12、各機器制御装置12に指示を送信する機器指示送信部13、上位装置14から搬送指示を受信する搬送指示受信部15、経路を探索する経路探索部16、搬送機器状態、搬送経路グラフ、物品情報、予定経路をそれぞれ記憶する記憶装置17a,17b,17c,17dを備える。
この図において、本発明の無人搬送装置10は、複数の搬送装置11を制御する複数の機器制御装置12、各機器制御装置12に指示を送信する機器指示送信部13、上位装置14から搬送指示を受信する搬送指示受信部15、経路を探索する経路探索部16、搬送機器状態、搬送経路グラフ、物品情報、予定経路をそれぞれ記憶する記憶装置17a,17b,17c,17dを備える。
上述した機器指示送信部13、搬送指示受信部15、および経路探索部16は、全体として搬送制御装置18を構成する。この搬送制御装置18は、例えば単一または複数のコンピュータである。
また、上述した記憶装置17a,17b,17c,17dは、単一の記憶装置17であってもよい。
また、上述した記憶装置17a,17b,17c,17dは、単一の記憶装置17であってもよい。
図1の構成において、上位装置14から搬送指示受信部15に、物品の搬送指示(移動先、移動優先度等)が与えられる。
経路探索部16は、搬送機器の状態17a(故障情報等)を搬送経路グラフ17bに反映する。
経路探索部16は搬送経路グラフ17b上の重みを評価し搬送経路を生成する。
機器指示送信部13は、生成した搬送経路に従って各制御装置12に搬送指示を行う。
経路探索部16は、搬送機器の状態17a(故障情報等)を搬送経路グラフ17bに反映する。
経路探索部16は搬送経路グラフ17b上の重みを評価し搬送経路を生成する。
機器指示送信部13は、生成した搬送経路に従って各制御装置12に搬送指示を行う。
図2は、搬送経路グラフの例を示す図である。
搬送経路は、天井走行台車(OHV)、無人搬送車(RGV)、自動クレーン等さまざまな種類の搬送機器の組み合わせによって構成される。これらの搬送機器の組み合わせを搬送経路グラフ1(以下単に「グラフ」という)によって表現する。
グラフ1は、「点」2と、隣接している点と点を結ぶ「枝」3の集合によって構成される。枝には方向を持たせることができる。この例で点2は矩形で、枝3は矢印で示す。
搬送機器(この図で、A~D)によって構成される経路をグラフで表現するために各機器の乗り換え地点、分岐地点、合流地点、搬送元になる地点、搬送先になる地点をすべて「点」と定義する。またこの各点から直接移動できる隣接地点までを「枝」と定義する。機器によっては、双方向に移動可能な場合と一方のみ移動可能な場合があり、それを「枝の方向」として定義する。
搬送経路は、天井走行台車(OHV)、無人搬送車(RGV)、自動クレーン等さまざまな種類の搬送機器の組み合わせによって構成される。これらの搬送機器の組み合わせを搬送経路グラフ1(以下単に「グラフ」という)によって表現する。
グラフ1は、「点」2と、隣接している点と点を結ぶ「枝」3の集合によって構成される。枝には方向を持たせることができる。この例で点2は矩形で、枝3は矢印で示す。
搬送機器(この図で、A~D)によって構成される経路をグラフで表現するために各機器の乗り換え地点、分岐地点、合流地点、搬送元になる地点、搬送先になる地点をすべて「点」と定義する。またこの各点から直接移動できる隣接地点までを「枝」と定義する。機器によっては、双方向に移動可能な場合と一方のみ移動可能な場合があり、それを「枝の方向」として定義する。
ここで図2の例において「出発点Aから到着点C」に搬送することを考える。このとき「A→C」と「A→B→D→C」の2通りの搬送経路がとれるが、どちらがより「良い経路」であるかを示す指針が必要である。
図3は、図2に重み4を付した図である。
本発明では、各枝3に重み4を定義し、搬送経路を構成する各枝の重み4の総和が最小となる経路を「最も良い経路」と定義する。重み4は任意の数値である。
本発明では、各枝3に重み4を定義し、搬送経路を構成する各枝の重み4の総和が最小となる経路を「最も良い経路」と定義する。重み4は任意の数値である。
図4は、図3の重みを変更した図である。
任意の2点間の「最も良い経路」を求めたとき、固定の重み量では常に同じ経路が得られるため、その経路の特定部分が渋滞していたとしても迂回するような経路を得ることができない。そのため渋滞に対応して重み4を動的に変更する必要がある。
例えば、図3において、「出発点Aから到着点C」に搬送することを考えると、通常は「A→C」が「最も良い経路」として求められるが、「A→C」間に渋滞が発生しているときに「A→C」間の重みを図4のように大きくすると、「最も良い経路」として「A→B→D→C」が得られる。この経路は渋滞の迂回経路である。
任意の2点間の「最も良い経路」を求めたとき、固定の重み量では常に同じ経路が得られるため、その経路の特定部分が渋滞していたとしても迂回するような経路を得ることができない。そのため渋滞に対応して重み4を動的に変更する必要がある。
例えば、図3において、「出発点Aから到着点C」に搬送することを考えると、通常は「A→C」が「最も良い経路」として求められるが、「A→C」間に渋滞が発生しているときに「A→C」間の重みを図4のように大きくすると、「最も良い経路」として「A→B→D→C」が得られる。この経路は渋滞の迂回経路である。
このように重み4を動的に変更するために、経路渋滞を検知するセンサを設置することや、機器の移動時間実績値を計測し、それを新しい「経路の通過時間」とするなどといった方法は従来から提案されている。しかし、このためには、渋滞、位置、速度等を求めるセンサや経路を求める装置に検知した情報を送信する装置を設置する必要がある。
そこで、本発明では、経路渋滞や移動時間の実績値を取得しないで、重みを以下の方法で動的に変更する。
(1) 記憶装置17により、予め、搬送機器の乗り換え地点、分岐地点、合流地点、搬送元、搬送先を「点」、各点から直接移動できる隣接地点までを「枝」、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするグラフを記憶する。
(2) 次に、搬送制御装置18により、各物品毎に、搬送元から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として決定し、決定した予定経路の各枝の現在の重みに所定の重みを加算する。所定の重みは、例えば、物品1台に相当する重みとする。
すなわち、搬送経路を求めたときに予定経路として、その経路を構成する各枝3に予約を入れる。枝3の重みは、その枝に入れられた予約数の増加関数とする。
例えば、次のように重みを定義する。
重み=「経路の通過時間」の関数+「消費エネルギー」の関数
新たな搬送経路は、上記の重みで求める。
(3) 次に、搬送制御装置18により、各物品毎に、決定した予定経路に沿って搬送機器を個別に制御して物品を搬送し、かつ搬送した予定経路の各枝の現在の重みから前記所定の重みを減算する。
(1) 記憶装置17により、予め、搬送機器の乗り換え地点、分岐地点、合流地点、搬送元、搬送先を「点」、各点から直接移動できる隣接地点までを「枝」、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするグラフを記憶する。
(2) 次に、搬送制御装置18により、各物品毎に、搬送元から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として決定し、決定した予定経路の各枝の現在の重みに所定の重みを加算する。所定の重みは、例えば、物品1台に相当する重みとする。
すなわち、搬送経路を求めたときに予定経路として、その経路を構成する各枝3に予約を入れる。枝3の重みは、その枝に入れられた予約数の増加関数とする。
例えば、次のように重みを定義する。
重み=「経路の通過時間」の関数+「消費エネルギー」の関数
新たな搬送経路は、上記の重みで求める。
(3) 次に、搬送制御装置18により、各物品毎に、決定した予定経路に沿って搬送機器を個別に制御して物品を搬送し、かつ搬送した予定経路の各枝の現在の重みから前記所定の重みを減算する。
図5Aと図5Bは、本発明の方法の第1実施形態を示す図である。この図において、図5Aは高負荷時、図5Bは低負荷時を示している。
一般に搬送経路は、天井走行台車(OHV)、無人搬送車(RGV)、自動クレーン等さまざまな種類の搬送機器の組み合わせによって構成される。このとき、搬送される荷物が多く高負荷なときや、一部の機器の故障等が発生したときでも十分に搬送できるように、複数の搬送機器や経路を用意して処理能力に余裕を持たせている。
本発明では、低負荷で搬送能力に余裕があるときに、そのような冗長な機器を使用しない経路で搬送することで、その機器の機能を停止することで省エネルギーを実現する。
すなわち、図5Aに示すように、経路「D→E」が複数(この図で2つ)の経路で達成される場合に、高負荷時には両方の経路を使用するが、図5Bに示すように、搬送負荷がある閾値以下になったときに、消費エネルギーの相対的に大きい機器を通過する枝の「エネルギー負荷」を消費エネルギーの相対的に小さい機器を通過する際の「エネルギー負荷」より大きく、例えば2倍以上に設定し、全経路中の一部の機器を実質的に停止させる。
一般に搬送経路は、天井走行台車(OHV)、無人搬送車(RGV)、自動クレーン等さまざまな種類の搬送機器の組み合わせによって構成される。このとき、搬送される荷物が多く高負荷なときや、一部の機器の故障等が発生したときでも十分に搬送できるように、複数の搬送機器や経路を用意して処理能力に余裕を持たせている。
本発明では、低負荷で搬送能力に余裕があるときに、そのような冗長な機器を使用しない経路で搬送することで、その機器の機能を停止することで省エネルギーを実現する。
すなわち、図5Aに示すように、経路「D→E」が複数(この図で2つ)の経路で達成される場合に、高負荷時には両方の経路を使用するが、図5Bに示すように、搬送負荷がある閾値以下になったときに、消費エネルギーの相対的に大きい機器を通過する枝の「エネルギー負荷」を消費エネルギーの相対的に小さい機器を通過する際の「エネルギー負荷」より大きく、例えば2倍以上に設定し、全経路中の一部の機器を実質的に停止させる。
ここで、次のように重みを定義する。
重み=各枝の通過時間に比例する「時間負荷」+消費エネルギーに比例する「エネルギー負荷」
このとき「最も良い経路」とは「通過時間が短くかつ消費エネルギーが小さい経路」となる。
搬送中の荷物の量が少なく、「経路の通過時間」が小さいときには、「消費エネルギー」の項の寄与が相対的に大きくなるため、「消費エネルギー」の少ない機器を通過する経路が選択される。搬送中の荷物の量が多く負荷が高くなると、「経路の通過時間」が大きくなり、「消費エネルギー」の項の寄与が相対的に小さくなる。そのため「消費エネルギー」の大きい機器も負荷低減のために使用される。
重み=各枝の通過時間に比例する「時間負荷」+消費エネルギーに比例する「エネルギー負荷」
このとき「最も良い経路」とは「通過時間が短くかつ消費エネルギーが小さい経路」となる。
搬送中の荷物の量が少なく、「経路の通過時間」が小さいときには、「消費エネルギー」の項の寄与が相対的に大きくなるため、「消費エネルギー」の少ない機器を通過する経路が選択される。搬送中の荷物の量が多く負荷が高くなると、「経路の通過時間」が大きくなり、「消費エネルギー」の項の寄与が相対的に小さくなる。そのため「消費エネルギー」の大きい機器も負荷低減のために使用される。
図6A~図6Cは、本発明の方法の第2実施形態を示す図である。この図において、各枝の重みは、各枝の通過時間に比例する「時間負荷」+消費エネルギーに比例する「エネルギー負荷」であり、図中に例えば、10+100のように、2つの数字で表している。なお、ここでは説明を簡略化するため、エネルギー負荷は変わらないこととした。
図6Aは、「出発点Aから到着点C」に最初に搬送する場合である。このとき「A→C」と「A→B→D→C」の2通りの搬送経路のうち、各枝の重みの総和が最小となる「A→B→D→C」が選択される。
この選択により、枝AB,BD,DCが予約され、枝AB,BD,DCの重みを10+20,20+20,20+20に変更する。
図6Bは、「出発点Aから到着点C」に2番目に搬送する場合である。このときも各枝の重みの総和が最小となる「A→C」(枝AC)が選択される。
この選択により、枝AB,BD,DCが予約され、枝AB,BD,DCの重みを15+20,30+20,30+20に変更する。
図6Cは、「出発点Aから到着点C」に3番目に搬送する場合である。このとき「A→C」と「A→B→D→C」の2通りの搬送経路のうち、各枝の重みの総和が最小となる「A→C」が選択される。
この選択により、枝ACが予約され、枝ACの重みをそれぞれ40+100に変更する。
なお、各枝の重み4は、予約された枝を実際に通過したときに、順次減算する。
図6Aは、「出発点Aから到着点C」に最初に搬送する場合である。このとき「A→C」と「A→B→D→C」の2通りの搬送経路のうち、各枝の重みの総和が最小となる「A→B→D→C」が選択される。
この選択により、枝AB,BD,DCが予約され、枝AB,BD,DCの重みを10+20,20+20,20+20に変更する。
図6Bは、「出発点Aから到着点C」に2番目に搬送する場合である。このときも各枝の重みの総和が最小となる「A→C」(枝AC)が選択される。
この選択により、枝AB,BD,DCが予約され、枝AB,BD,DCの重みを15+20,30+20,30+20に変更する。
図6Cは、「出発点Aから到着点C」に3番目に搬送する場合である。このとき「A→C」と「A→B→D→C」の2通りの搬送経路のうち、各枝の重みの総和が最小となる「A→C」が選択される。
この選択により、枝ACが予約され、枝ACの重みをそれぞれ40+100に変更する。
なお、各枝の重み4は、予約された枝を実際に通過したときに、順次減算する。
上述した本発明の方法によって以下の効果が得られる。
(1)一般的に経路予約の少ない経路の重みは小さいので、新たな搬送経路は経路予約の少ない経路が優先的に選ばれる。予約の少ない経路は、混雑のない経路とみなせるので渋滞の迂回が可能になる。
(2)各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするので、省エネルギー化を図った経路を選択できる。
従って、故障や渋滞等の経路の状態に柔軟に対応するとともに、各種機器の重み計算に必要な情報を得るためのセンサ、通信路、計算装置などが不要になり、かつ省エネルギー化を図ることができる。
(1)一般的に経路予約の少ない経路の重みは小さいので、新たな搬送経路は経路予約の少ない経路が優先的に選ばれる。予約の少ない経路は、混雑のない経路とみなせるので渋滞の迂回が可能になる。
(2)各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするので、省エネルギー化を図った経路を選択できる。
従って、故障や渋滞等の経路の状態に柔軟に対応するとともに、各種機器の重み計算に必要な情報を得るためのセンサ、通信路、計算装置などが不要になり、かつ省エネルギー化を図ることができる。
図7は、本発明の方法の第3実施形態を示す図である。この図において、7は、バッファを有する装置であり、ある待ち時間(例えば処理時間:10分)が必ず発生するものとする。
この例に示すように搬送先ですぐ次の作業が行われるのではなく、待つとこが明らかなときは、急いで搬送する必要はない。そこで、
搬送に必要な時間<=(搬送先の待ち時間)
となる経路が複数ある場合は、最もエネルギー消費の少ない経路を選択する。さらに許容閾時間を定義し、
搬送に必要な時間<=(搬送先の待ち時間+許容閾時間)
となる経路が複数ある場合は、最もエネルギー消費の少ない経路を選択する。これにより、装置に若干の待ちが発生するものの、さらに省エネルギーが可能になる。
この例に示すように搬送先ですぐ次の作業が行われるのではなく、待つとこが明らかなときは、急いで搬送する必要はない。そこで、
搬送に必要な時間<=(搬送先の待ち時間)
となる経路が複数ある場合は、最もエネルギー消費の少ない経路を選択する。さらに許容閾時間を定義し、
搬送に必要な時間<=(搬送先の待ち時間+許容閾時間)
となる経路が複数ある場合は、最もエネルギー消費の少ない経路を選択する。これにより、装置に若干の待ちが発生するものの、さらに省エネルギーが可能になる。
一方、上述した本発明の方法では、搬送を開始するときにその出発点から到着点への複数の経路から適切な経路を選択するために、あらかじめ複数の経路候補を用意しその中から選択し、かつ搬送経路をグラフで表現し経路渋滞を重みに反映することで渋滞回避を行っている。
しかし、搬送指示が出たときのそのときの経路状態を用いて経路探索を行った場合、あくまでもその時の状態を考慮するだけなので将来の発生しうる渋滞には対応できない。また、搬送機器の移動時間や速度等から将来の渋滞予測等も加味して経路を選ぶことも行われているが、予測のために多くの計算が必要である、また未来になるほど予測は不確実になり信頼のおけないものになる。
そこで、本発明では、搬送指示が出たときのそのときの経路状態を反映した経路を作成し搬送装置に指示するだけではなく、搬送機器の乗り換え地点・分離地点等の搬送先に対して複数の経路をとりうる個所において最新の経路状態で再度経路を求める。
すなわち、本発明によれば、各物品が、点から点に移動する毎に、現在の「予定経路」の各枝の現在の重みから前記所定の重みを減算し、次いで現在の点から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として再決定し、決定した予定経路の各枝の現在の重みに前記所定の重みを加算する。
このように頻繁に経路の再検討を行うことで、時々刻々と変わる経路状況に応じた搬送経路を求められるだけでなく、将来の予測に失敗し適切な経路を選択できなかったときも、再検討のときに適切な経路に修正される。
すなわち、本発明によれば、各物品が、点から点に移動する毎に、現在の「予定経路」の各枝の現在の重みから前記所定の重みを減算し、次いで現在の点から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として再決定し、決定した予定経路の各枝の現在の重みに前記所定の重みを加算する。
このように頻繁に経路の再検討を行うことで、時々刻々と変わる経路状況に応じた搬送経路を求められるだけでなく、将来の予測に失敗し適切な経路を選択できなかったときも、再検討のときに適切な経路に修正される。
図8Aと図8Bは、本発明の方法の第4実施形態であり、搬送経路の再検討を示す図である。
図8Aのように、搬送指示が出たときの経路条件で経路を求めると、渋滞がないのでF-H間を経由しようとするが、この2つの荷物は、将来F-H間の領域を同時に使用するために渋滞が発生する。
そこで図8Bのように、分離地点であるEで経路を再検討することによって、渋滞しない回避経路を求めることができる。
図8Aのように、搬送指示が出たときの経路条件で経路を求めると、渋滞がないのでF-H間を経由しようとするが、この2つの荷物は、将来F-H間の領域を同時に使用するために渋滞が発生する。
そこで図8Bのように、分離地点であるEで経路を再検討することによって、渋滞しない回避経路を求めることができる。
上述した本発明の装置及び方法によれば、搬送機器の乗り換え地点、分岐地点、合流地点、搬送元、搬送先を「点」、各点から直接移動できる隣接地点までを「枝」、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするグラフを記憶し、各物品毎に、搬送元から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として決定し、決定した予定経路の各枝の重みを現在の重みに加算するので、
搬送経路をグラフ1とみなし、経路探索部で一旦決定した経路を将来の渋滞状態として重みに適用することで、渋滞になる経路を予測し、それを回避する経路を決定することができる。
また、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするので、省エネルギー化を図った経路を選択できる。
従って、故障や渋滞等の経路の状態に柔軟に対応するとともに、各種機器の重み計算に必要な情報を得るためのセンサ、通信路、計算装置などが不要になり、かつ省エネルギー化を図ることができる。
搬送経路をグラフ1とみなし、経路探索部で一旦決定した経路を将来の渋滞状態として重みに適用することで、渋滞になる経路を予測し、それを回避する経路を決定することができる。
また、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするので、省エネルギー化を図った経路を選択できる。
従って、故障や渋滞等の経路の状態に柔軟に対応するとともに、各種機器の重み計算に必要な情報を得るためのセンサ、通信路、計算装置などが不要になり、かつ省エネルギー化を図ることができる。
また、各物品が、点2から点2に移動する毎に、現在の「予定経路」の各枝の重みを現在の重みから減算し、次いで現在の点から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として再決定し、決定した予定経路の各枝の重みを現在の重みに加算するので、搬送経路の分離、合流、乗り換え等の地点に移動するたびに、搬送経路を再検討し経路を更新することができる。
従って、常に最新の経路情報で経路を選択するとともに、未来の混雑予測に失敗して適切でない経路を選んだとしても、搬送途中で適切な経路に戻ることができる。またこのため、高精度の予測が不要になる。
従って、常に最新の経路情報で経路を選択するとともに、未来の混雑予測に失敗して適切でない経路を選んだとしても、搬送途中で適切な経路に戻ることができる。またこのため、高精度の予測が不要になる。
さらに、前記所定の重みを、物品1台に相当する「時間負荷」とし、軽負荷時や急いで搬送する必要がないときには、消費エネルギーの相対的に大きい機器を通過する枝の「エネルギー負荷」を大きく設定し、全経路中の一部の機器を実質的に停止させるので、機器の停止により、軽負荷時の省エネルギーが実現できる。
また、搬送先で待ち時間が発生する場合に、搬送に必要な時間<=(搬送先の待ち時間)、又は搬送に必要な時間<=(搬送先の待ち時間+許容閾時間)、となる経路から最もエネルギー消費の少ない経路を選択することにより、装置に若干の待ちが発生するものの、さらに省エネルギーが可能になる。
なお、本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々の変更を加え得ることは勿論である。
Claims (5)
- 複数の搬送機器を個別に制御する無人搬送装置であって、
各搬送装置を制御する複数の機器制御装置と、経路を探索し各機器制御装置に指示を送信する搬送制御装置と、搬送機器状態、搬送経路グラフおよび予定経路を記憶する記憶装置とを備え、
前記記憶装置は、搬送機器の乗り換え地点、分岐地点、合流地点、搬送元、搬送先を「点」、各点から直接移動できる隣接地点までを「枝」、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするグラフを記憶し、
前記搬送制御装置は、各物品毎に、搬送元から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として決定し、決定した予定経路の各枝の現在の重みに所定の重みを加算し、
各物品毎に、決定した予定経路に沿って搬送機器を個別に制御して物品を搬送し、かつ搬送した予定経路の各枝の現在の重みから前記所定の重みを減算する、ことを特徴とする無人搬送装置。 - 複数の搬送機器を個別に制御する無人搬送装置の搬送経路決定方法であって、
記憶装置により、搬送機器の乗り換え地点、分岐地点、合流地点、搬送元、搬送先を「点」、各点から直接移動できる隣接地点までを「枝」、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするグラフを記憶し、
搬送制御装置により、各物品毎に、搬送元から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として決定し、決定した予定経路の各枝の現在の重みに所定の重みを加算し、
各物品毎に、決定した予定経路に沿って搬送機器を個別に制御して物品を搬送し、かつ搬送した予定経路の各枝の現在の重みから前記所定の重みを減算する、ことを特徴とする無人搬送装置の搬送経路決定方法。 - 前記所定の重みを、物品1台に相当する「時間負荷」とし、
搬送負荷がある閾値以下になったときに、消費エネルギーの相対的に大きい機器を通過する枝の「エネルギー負荷」を大きく設定し、全経路中の一部の機器を実質的に停止させる、ことを特徴とする請求項2に記載の無人搬送装置の搬送経路決定方法。 - 搬送先で待ち時間が発生する場合に、搬送に必要な時間<=(搬送先の待ち時間)、又は搬送に必要な時間<=(搬送先の待ち時間+許容閾時間)、となる経路から最もエネルギー消費の少ない経路を選択する、ことを特徴とする請求項2に記載の無人搬送装置の搬送経路決定方法。
- 各物品が、点から点に移動する毎に、現在の「予定経路」の各枝の現在の重みから前記所定の重みを減算し、次いで現在の点から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として再決定し、決定した予定経路の各枝の現在の重みに前記所定の重みを加算する、ことを特徴とする請求項2に記載の無人搬送装置の搬送経路決定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2009801202281A CN102047194B (zh) | 2008-05-28 | 2009-05-26 | 无人搬运装置及其搬运路径决定方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008-139969 | 2008-05-28 | ||
| JP2008139969A JP5057239B2 (ja) | 2008-05-28 | 2008-05-28 | 無人搬送装置とその搬送経路決定方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2009145166A1 true WO2009145166A1 (ja) | 2009-12-03 |
Family
ID=41377039
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2009/059566 WO2009145166A1 (ja) | 2008-05-28 | 2009-05-26 | 無人搬送装置とその搬送経路決定方法 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP5057239B2 (ja) |
| CN (1) | CN102047194B (ja) |
| TW (1) | TWI402643B (ja) |
| WO (1) | WO2009145166A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5617854B2 (ja) * | 2012-02-15 | 2014-11-05 | 村田機械株式会社 | 台車システム |
| CN104567854A (zh) * | 2013-10-24 | 2015-04-29 | 中国科学院沈阳自动化研究所 | 一种面向半导体生产线搬运系统天车路线规划方法 |
| JP6293845B2 (ja) * | 2016-11-01 | 2018-03-14 | 東京エレクトロン株式会社 | 生産効率化システム、生産効率化装置および生産効率化方法 |
| JPWO2020170623A1 (ja) * | 2019-02-20 | 2021-12-16 | 日本電産株式会社 | 搬送システム、および搬送車 |
| CN111930113A (zh) * | 2020-06-30 | 2020-11-13 | 创新工场(北京)企业管理股份有限公司 | 一种为自主导航机器人设置行驶路径的方法与装置 |
| JP7409284B2 (ja) | 2020-10-22 | 2024-01-09 | 株式会社ダイフク | 搬送システム |
| JP7424957B2 (ja) * | 2020-10-30 | 2024-01-30 | 株式会社日立インダストリアルプロダクツ | 搬送車制御システム、運行管理装置および搬送経路生成方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09222852A (ja) * | 1996-02-20 | 1997-08-26 | Fujitsu Ltd | 認知地図を持つ装置 |
| JPH1185280A (ja) * | 1997-09-09 | 1999-03-30 | Murata Mach Ltd | 無人搬送車システム |
| JP2003208222A (ja) * | 2002-01-10 | 2003-07-25 | Asyst Shinko Inc | 無人搬送台車システム |
| JP2003337623A (ja) * | 2002-05-21 | 2003-11-28 | Asyst Shinko Inc | 経路決定装置及び方法 |
| JP2004280213A (ja) * | 2003-03-13 | 2004-10-07 | Japan Science & Technology Agency | 分散型経路計画装置及び方法、分散型経路計画プログラム |
| JP2005050105A (ja) * | 2003-07-28 | 2005-02-24 | Matsushita Electric Works Ltd | 自律移動のための経路生成装置及び該装置を用いた自律移動装置 |
| JP2007257274A (ja) * | 2006-03-23 | 2007-10-04 | Toyota Motor Corp | 移動体の経路探索システム及び経路探索方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0683445A (ja) * | 1992-08-31 | 1994-03-25 | Shinko Electric Co Ltd | 自動走行移動体による無人搬送システムにおける走行経路選定方法 |
| JPH11249734A (ja) * | 1998-03-03 | 1999-09-17 | Mitsubishi Heavy Ind Ltd | 自律誘導装置 |
| TWI256372B (en) * | 2001-12-27 | 2006-06-11 | Tokyo Electron Ltd | Carrier system of polishing processing body and conveying method of polishing processing body |
| JP4282662B2 (ja) * | 2004-12-14 | 2009-06-24 | 本田技研工業株式会社 | 自律移動ロボットの移動経路生成装置 |
| TW200705331A (en) * | 2005-07-21 | 2007-02-01 | Maction Technologies Inc | Self-learning optimal path planning method suitable for satellite navigation apparatus |
-
2008
- 2008-05-28 JP JP2008139969A patent/JP5057239B2/ja not_active Expired - Fee Related
-
2009
- 2009-05-26 CN CN2009801202281A patent/CN102047194B/zh not_active Expired - Fee Related
- 2009-05-26 WO PCT/JP2009/059566 patent/WO2009145166A1/ja active Application Filing
- 2009-05-27 TW TW098117637A patent/TWI402643B/zh not_active IP Right Cessation
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09222852A (ja) * | 1996-02-20 | 1997-08-26 | Fujitsu Ltd | 認知地図を持つ装置 |
| JPH1185280A (ja) * | 1997-09-09 | 1999-03-30 | Murata Mach Ltd | 無人搬送車システム |
| JP2003208222A (ja) * | 2002-01-10 | 2003-07-25 | Asyst Shinko Inc | 無人搬送台車システム |
| JP2003337623A (ja) * | 2002-05-21 | 2003-11-28 | Asyst Shinko Inc | 経路決定装置及び方法 |
| JP2004280213A (ja) * | 2003-03-13 | 2004-10-07 | Japan Science & Technology Agency | 分散型経路計画装置及び方法、分散型経路計画プログラム |
| JP2005050105A (ja) * | 2003-07-28 | 2005-02-24 | Matsushita Electric Works Ltd | 自律移動のための経路生成装置及び該装置を用いた自律移動装置 |
| JP2007257274A (ja) * | 2006-03-23 | 2007-10-04 | Toyota Motor Corp | 移動体の経路探索システム及び経路探索方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102047194A (zh) | 2011-05-04 |
| CN102047194B (zh) | 2013-11-13 |
| TWI402643B (zh) | 2013-07-21 |
| JP2009288976A (ja) | 2009-12-10 |
| JP5057239B2 (ja) | 2012-10-24 |
| TW201007404A (en) | 2010-02-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5057239B2 (ja) | 無人搬送装置とその搬送経路決定方法 | |
| JP4438095B2 (ja) | 搬送システム | |
| JP4746674B2 (ja) | 搬送システムと搬送方法 | |
| TW201812971A (zh) | 行走車系統及行走車系統的控制方法 | |
| JP4782194B2 (ja) | 搬送システム | |
| WO2010035411A1 (ja) | 搬送車システム | |
| JP2011102166A (ja) | 搬送経路決定方法及び自動搬送システム | |
| WO2020039699A1 (ja) | 走行車制御装置、走行車システム、及び走行車制御方法 | |
| KR102431740B1 (ko) | 주행차 컨트롤러 및 주행차 시스템 | |
| JP5146823B2 (ja) | 無人搬送装置とその搬送経路決定方法 | |
| JP2022069460A (ja) | 物品搬送設備 | |
| JP2022068568A (ja) | 搬送システム | |
| TWI380942B (zh) | 無人搬送裝置及其搬送路徑決定方法 | |
| US10401871B2 (en) | Travelling vehicle system and method for controlling travelling vehicle system | |
| JP3988530B2 (ja) | 経路決定装置及び方法 | |
| CN116501063B (zh) | 基于混凝土运输平台的agv小车控制系统 | |
| Vivaldini et al. | Automatic routing of forklift robots in warehouse applications | |
| CN101963812B (zh) | 无人输送装置和其输送路径决定方法 | |
| KR0185101B1 (ko) | 무인운반차의 운행경로 탐색방법 | |
| JP7501635B2 (ja) | 走行車システム | |
| JP2016095585A (ja) | スケジュール管理装置 | |
| KR19980020779A (ko) | 무인운반차의 트래픽 제어방법 | |
| JP2023177468A (ja) | 搬送システム、搬送方法、及び搬送プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 200980120228.1 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 09754674 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 09754674 Country of ref document: EP Kind code of ref document: A1 |