RU2610042C2 - Автоматизированная машина для измельчения, а также способ выгрузки измельченного материала - Google Patents
Автоматизированная машина для измельчения, а также способ выгрузки измельченного материала Download PDFInfo
- Publication number
- RU2610042C2 RU2610042C2 RU2015109939A RU2015109939A RU2610042C2 RU 2610042 C2 RU2610042 C2 RU 2610042C2 RU 2015109939 A RU2015109939 A RU 2015109939A RU 2015109939 A RU2015109939 A RU 2015109939A RU 2610042 C2 RU2610042 C2 RU 2610042C2
- Authority
- RU
- Russia
- Prior art keywords
- conveyor
- loading surface
- machine
- relative
- point
- Prior art date
Links
- 238000000227 grinding Methods 0.000 title claims abstract description 61
- 239000000463 material Substances 0.000 title claims abstract description 36
- 238000000034 method Methods 0.000 title claims description 24
- 238000001514 detection method Methods 0.000 claims abstract description 34
- 230000003287 optical effect Effects 0.000 claims description 9
- 238000010191 image analysis Methods 0.000 claims description 4
- 239000011236 particulate material Substances 0.000 claims description 3
- 238000000354 decomposition reaction Methods 0.000 claims 1
- 239000000126 substance Substances 0.000 abstract 1
- 239000012141 concentrate Substances 0.000 description 2
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 230000005236 sound signal Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images


Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C23/00—Auxiliary devices or arrangements for constructing, repairing, reconditioning, or taking-up road or like surfaces
- E01C23/06—Devices or arrangements for working the finished surface; Devices for repairing or reconditioning the surface of damaged paving; Recycling in place or on the road
- E01C23/08—Devices or arrangements for working the finished surface; Devices for repairing or reconditioning the surface of damaged paving; Recycling in place or on the road for roughening or patterning; for removing the surface down to a predetermined depth high spots or material bonded to the surface, e.g. markings; for maintaining earth roads, clay courts or like surfaces by means of surface working tools, e.g. scarifiers, levelling blades
- E01C23/085—Devices or arrangements for working the finished surface; Devices for repairing or reconditioning the surface of damaged paving; Recycling in place or on the road for roughening or patterning; for removing the surface down to a predetermined depth high spots or material bonded to the surface, e.g. markings; for maintaining earth roads, clay courts or like surfaces by means of surface working tools, e.g. scarifiers, levelling blades using power-driven tools, e.g. vibratory tools
- E01C23/088—Rotary tools, e.g. milling drums
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C23/00—Auxiliary devices or arrangements for constructing, repairing, reconditioning, or taking-up road or like surfaces
- E01C23/06—Devices or arrangements for working the finished surface; Devices for repairing or reconditioning the surface of damaged paving; Recycling in place or on the road
- E01C23/12—Devices or arrangements for working the finished surface; Devices for repairing or reconditioning the surface of damaged paving; Recycling in place or on the road for taking-up, tearing-up, or full-depth breaking-up paving, e.g. sett extractor
- E01C23/122—Devices or arrangements for working the finished surface; Devices for repairing or reconditioning the surface of damaged paving; Recycling in place or on the road for taking-up, tearing-up, or full-depth breaking-up paving, e.g. sett extractor with power-driven tools, e.g. oscillated hammer apparatus
- E01C23/127—Devices or arrangements for working the finished surface; Devices for repairing or reconditioning the surface of damaged paving; Recycling in place or on the road for taking-up, tearing-up, or full-depth breaking-up paving, e.g. sett extractor with power-driven tools, e.g. oscillated hammer apparatus rotary, e.g. rotary hammers
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0291—Fleet control
- G05D1/0293—Convoy travelling
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0259—Control of position or course in two dimensions specially adapted to land vehicles using magnetic or electromagnetic means
- G05D1/0261—Control of position or course in two dimensions specially adapted to land vehicles using magnetic or electromagnetic means using magnetic plots
Abstract
Предложена автоматизированная машина для измельчения с регулируемым по высоте корпусом машины, с контроллером для осуществления перемещения и измельчения, с рабочим барабаном, с поворотным транспортировочным конвейерным устройством, расположенным впереди или позади рабочего барабана, если смотреть в направлении перемещения машины для измельчения, при этом последний или единственный транспортировочный конвейер транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, выполнен с возможностью поворота в сторону, относительно корпуса машины, вокруг, по существу, вертикальной оси под углом поворота и вокруг оси, перпендикулярной оси, под углом возвышения, и при этом транспортировочный конвейер выгружает измельченный материал при заданной скорости подачи в точку падения на загрузочной поверхности транспортного средства. Контроллер содержит систему обнаружения и управления, которая непрерывно определяет изменяемое положение загрузочной поверхности транспортного средства и транспортировочного конвейера относительно корпуса машины или изменяемое положение загрузочной поверхности транспортного средства относительно транспортировочного конвейера и непрерывно управляет позиционированием точки падения измельченного материала автоматически через угол поворота, и/или угол возвышения, и/или скорость подачи транспортировочного конвейера таким образом, что выгружаемый измельченный материал падает в пределах загрузочной поверхности. 2 н. и 11 з.п. ф-лы, 3 ил.
Description
Настоящее изобретение относится к автоматизированной машине для измельчения в соответствии с ограничительной частью пункта 1 формулы изобретения, а также к способу выгрузки измельченного материала в соответствии с ограничительной частью пункта 10 формулы изобретения.
Известно, что автоматизированная машина для измельчения выгружает измельченный материал на не меньше чем одно транспортное средство с загрузочной поверхностью.
Машина для измельчения содержит контроллер для осуществления перемещения и измельчения, а также рабочий барабан для измельчения, например, дорожного покрытия. Транспортировочное конвейерное устройство, например, транспортировочное конвейерное устройство, содержащее по меньшей мере один транспортировочный конвейер, расположено впереди или позади упомянутого рабочего барабана, если смотреть в направлении перемещения. Транспортировочное конвейерное устройство содержит разгрузочный конец, в котором измельченный материал выгружают на загрузочную поверхность упомянутого по меньшей мере одного транспортного средства через участок полета в виде параболической траектории, которая обусловлена скоростью подачи. Последний или единственный транспортировочный конвейер транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, выполнен с возможностью поворота в сторону, относительно продольной оси машины для измельчения, на заданный угол поворота влево или вправо и с возможностью регулирования по высоте на заданный угол возвышения.
На практике возникают проблемы при взаимодействии машины для измельчения с транспортным средством.
Например, при использовании машины для измельчения с передней загрузкой измельченный материал выгружают вперед на транспортное средство, движущееся впереди. Оператор машины для измельчения должен сигнализировать водителю транспортного средства, когда транспортное средство должно продолжать перемещение вперед. Это приводит к проблемам, поскольку оператору в принципе нужно концентрироваться на процессе измельчения и одновременно нужно предотвращать столкновение с транспортным средством, движущимся впереди. Информация обычно передается посредством звука гудка, чтобы, как только водитель транспортного средства услышит звук гудка, транспортное средство переместилось вперед на некоторое расстояние. Проблема возникает в том случае, если водитель транспортного средства не слышит сигнала гудка или если другое транспортное средство, движущееся за ним, издает сигнал гудка, так что водитель транспортного средства ошибочно думает, что нужно перемещать его транспортное средство вперед. Если водитель транспортного средства не слышит сигнала гудка, это может вызвать столкновение поворотного транспортировочного конвейера транспортировочного конвейерного устройства с транспортным средством, или оператор машины для измельчения вынужден останавливать непрерывный процесс измельчения.
Дополнительная проблема заключается в том, что оператор машины для измельчения также должен осуществлять загрузку загрузочной поверхности посредством регулирования угла поворота, угла возвышения и скорости подачи последнего или единственного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, и тем самым отвлекаться от реальной задачи осуществления операции измельчения. Например, при изменении направления рулевого управления машиной для измельчения может потребоваться коррекция угла поворота транспортировочного конвейера.
В случае машины для измельчения с задней загрузкой также возникают проблемы взаимодействия машины для измельчения с транспортным средством, в частности, когда транспортное средство должно двигаться позади машины для измельчения задним ходом. Еще более высокий уровень напряжения вызван тем, что оператор машины для измельчения, когда он, с одной стороны, должен управлять операцией измельчения при переднем ходе и, с другой стороны, должен контролировать загрузку транспортного средства позади машины для измельчения, если смотреть в направлении перемещения, должен регулировать угол поворота, угол возвышения и/или скорость подачи транспортировочного конвейерного устройства, и должен передавать необходимую информацию водителю транспортного средства.
Таким образом, целью настоящего изобретения является создание автоматизированной машины для измельчения, а также способа выгрузки измельченного материала из машины для измельчения, который обеспечивает автоматическое согласование процесса разгрузки машины для измельчения, находящейся в процессе измельчения, с перемещением транспортного средства.
Упомянутая цель достигается посредством признаков пунктов 1 и 10, соответственно.
Изобретение предпочтительно предусматривает, что упомянутый контроллер содержит систему обнаружения и управления, которая непрерывно определяет изменяемое положение загрузочной поверхности транспортного средства и последнего или единственного поворотного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, относительно корпуса машины, или изменяемое положение загрузочной поверхности транспортного средства относительно поворотного транспортировочного конвейера, и которая непрерывно управляет позиционированием точки падения измельченного материала автоматически через угол поворота и/или угол возвышения и/или скорость подачи поворотного транспортировочного конвейера таким образом, что выгружаемый измельченный материал падает в пределах загрузочной поверхности.
Такой контроллер позволяет оператору машины для измельчения концентрироваться на операции измельчения и на перемещении вдоль конкретной колеи измельчения. Таким образом, осуществляется процесс автоматической выгрузки, который обеспечивает автоматическое согласование процесса выгрузки с перемещением машины для измельчения и транспортного средства даже при движении на повороте. Например, можно также осуществлять управление углом поворота последнего или единственного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, в соответствии с углом рулевого управления автоматизированной машины для измельчения.
Предпочтительно предполагается, что система обнаружения и управления непрерывно управляет позиционированием точки падения измельченного материала автоматически таким образом, что выгружаемый измельченный материал падает в центр загрузочной поверхности или в другую заданную точку падения в пределах загрузочной поверхности.
Загрузочная поверхность может быть расположена, и положение транспортировочного конвейера и скорость подачи поворотного транспортировочного конвейера можно регулировать таким образом, что точка падения на загрузочную поверхность всегда поддерживается в положении, заданном контроллером, независимо от перемещений машины для измельчения и транспортного средства.
Система обнаружения и управления может содержать по меньшей мере один датчик, который непрерывно определяет положение загрузочной поверхности и/или поворотного транспортировочного конвейера транспортировочного конвейерного устройства, и/или может содержать дополнительные датчики, которые определяют угол поворота, угол возвышения и/или скорость подачи транспортировочного конвейера.
Предпочтительный вариант осуществления предусматривает систему обнаружения и управления для непрерывного определения положения загрузочной поверхности и/или последнего или единственного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, посредством первой системы записи изображения или неоптической электронной системы позиционирования, в частности системы радиочастотной идентификации (Radio-Frequency Identification - RFID), которая обеспечивает данные для определения положения загрузочной поверхности относительно корпуса машины или относительно поворотного транспортировочного конвейера.
Система обнаружения и управления может сравнивать данные для определения положения с данными заданного целевого положения, для того чтобы в случае каких-либо отклонений от данных заданного целевого положения осуществлять непрерывное управление положением для положения разгрузочного конца и/или точки падения измельченного материала и/или управление скоростью для скорости подачи в соответствии с заданной точкой падения.
Система обнаружения и управления может содержать вторую систему записи изображения, которая определяет и анализирует состояние заполнения загрузочной поверхности посредством оценки данных в виде изображений и которая непрерывно управляет скоростью подачи и/или положением разгрузочного конца и/или точки падения измельченного материала относительно загрузочной поверхности, чтобы загружать загрузочную поверхность равномерно и/или в соответствии с заданной программой загрузки. Вторая система записи изображения может быть опущена, если система записи изображения уже используется для определения положения загрузочной поверхности, данные в виде изображений которой могут быть использованы также для определения состояния заполнения.
Система обнаружения и управления может определять положение загрузочной поверхности, а также регулировать положение последнего или единственного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, или положение точки падения и скорость подачи таким образом, чтобы точка падения на загрузочную поверхность всегда поддерживалась в положении в пределах загрузочной поверхности, заданном контроллером, независимо от перемещений машины для измельчения и транспортного средства.
Первая и/или вторая система записи изображения или датчик для системы радиочастотной идентификации (RFID) может быть расположен в разгрузочном конце единственного или последнего транспортировочного конвейера, если смотреть в направлении подачи измельченного материала.
Размещение такой системы позиционирования в разгрузочном конце транспортировочного конвейера позволяет определять положение транспортного средства относительно последнего или единственного транспортировочного конвейера машины для измельчения, если смотреть в направлении транспортировки, без необходимости дополнительно определять положение машины для измельчения.
Кроме того, данные в виде изображений могут быть подвергнуты анализу, чтобы определять, как и в какой степени заполнена загрузочная поверхность. Управление скоростью подачи и/или положением разгрузочного конца транспортировочного конвейера или точки падения измельченного материала относительно загрузочной поверхности обеспечивает равномерную загрузку загрузочной поверхности. Состояние заполнения загрузочной поверхности может быть определено и подвергнуто анализу посредством системы записи изображения, и можно осуществлять непрерывное управление скоростью подачи и/или положением разгрузочного конца транспортировочного конвейера относительно загрузочной поверхности, для того чтобы загружать загрузочную поверхность равномерно и/или в соответствии с заданной программой загрузки.
Вместе с тем может быть также предпочтительно изменять точку падения на загрузочной поверхности, чтобы обеспечить равномерную загрузку загрузочной поверхности.
Предполагается, что система обнаружения и управления управляет положением разгрузочного конца транспортировочного конвейерного устройства и тем самым точки падения на загрузочную поверхность посредством регулирования угла бокового поворота поворотного транспортировочного конвейера транспортировочного конвейерного устройства относительно направления перемещения или посредством регулирования угла возвышения поворотного транспортировочного конвейера транспортировочного конвейерного устройства.
Система обнаружения и управления может выдавать сигнал до или после в случае какого-либо отклонения, неисправимого посредством управления положением загрузочной поверхности относительно положения последнего или единственного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, и/или относительно корпуса машины. Упомянутый сигнал может быть использован для того, чтобы вызвать прекращение работы машины или принять меры для предотвращения столкновений между транспортными средствами.
В соответствии с загрузочными поверхностями разных транспортных средств и/или в соответствии с разными условиями загрузки загрузочной поверхности для разных положений и/или точек падения в пределах положения загрузочной поверхности, определяемого посредством системы обнаружения и управления, управляющие данные для угла поворота, угла возвышения и/или скорости подачи могут храниться в карте, которая является доступной для системы обнаружения и управления. RFID система обеспечивает идентификацию, например, загрузочных поверхностей разных транспортных средств.
По меньшей мере одна точка обычно по существу прямоугольной загрузочной поверхности или по существу кубовидной загрузочной емкости соответственно может содержать метку, обнаруживаемую посредством системы обнаружения и управления.
Сигнал управления перемещением, например, визуальный или звуковой сигнал, может быть генерирован в соответствии с сигналами позиционирования. Сигналы управления перемещением для транспортного средства описаны в принципе в DE 10 2009041842 А1.
Упомянутая цель достигается также посредством признаков пункта 12.
В соответствии со способом настоящего изобретения предполагается, что изменяемое положение загрузочной поверхности транспортного средства и последнего или единственного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, относительно корпуса машины, или изменяемое положение загрузочной поверхности транспортного средства относительно последнего или единственного транспортировочного конвейера, если смотреть в направлении транспортировки, непрерывно определяется посредством системы обнаружения и управления, и что непрерывное управление позиционированием точки падения измельченного материала осуществляется автоматически посредством системы обнаружения и управления через угол поворота и/или угол возвышения и/или скорость подачи транспортировочного конвейерного устройства таким образом, что измельченный материал выгружается в пределах загрузочной поверхности.
Непрерывное управление позиционированием точки падения измельченного материала может осуществляться автоматически посредством системы обнаружения и управления таким образом, что измельченный материал выгружается в центр загрузочной поверхности или в другую заданную точку падения в пределах загрузочной поверхности.
Непрерывное управление положением загрузочной поверхности и/или последнего или единственного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, может осуществляться посредством системы записи изображения или неоптической электронной системы позиционирования, в частности системы радиочастотной идентификации (RFID), которая обеспечивает данные для определения положения загрузочной поверхности относительно корпуса машины или относительно последнего или единственного транспортировочного конвейера, если смотреть в направлении перемещения.
В одном варианте осуществления, изображение для определения положения загрузочной поверхности относительно разгрузочного конца транспортировочного конвейера и/или для определения состояния заполнения загрузочной поверхности может быть записано и подвергнуто анализу посредством системы записи изображения, используя заданную частоту выборки. Проанализированные данные сравнивают с данными целевого положения, и в случае обнаружения каких-либо отклонений может быть осуществлено управление положением разгрузочного конца транспортировочного конвейера и/или скоростью подачи и/или положением транспортного средства.
Данные целевого положения могут быть определены посредством процедуры обучения.
Положение геометрического центра загрузочной поверхности может быть определено посредством анализа изображений или посредством неоптической системы позиционирования, и положение текущей точки падения на загрузочной поверхности может быть определено посредством анализа изображений, и позиционное управление положением разгрузочного конца и/или точки падения измельченного материала, а также управление скоростью подачи транспортировочного конвейера может быть осуществлено в соответствии с требуемым положением точки падения, так что осуществляется непрерывное регулирование положения текущей точки падения.
Варианты осуществления изобретения описаны ниже более подробно со ссылкой на чертежи.
На чертежах показано:
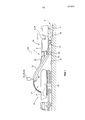
Фиг. 1 представляет собой машину для измельчения с передней загрузкой,
Фиг. 2 представляет собой машину для измельчения с задней загрузкой,
Фиг. 3 представляет собой вид сверху машины для измельчения в соответствии с фиг. 1.
Фиг. 1 показывает машину для измельчения, используя в качестве примера машину 1а для измельчения с передней загрузкой. Дорожно-строительная машина 1 содержит корпус 2 машины, который поддерживается посредством ходовой части 4, содержащей, например, приводные узлы на гусеничном ходу или колеса, при этом упомянутая ходовая часть 4 соединена с корпусом 2 машины посредством по меньшей мере трех устройств регулирования высоты в виде подъемных колонн 5. Как можно понять из фиг. 2, для данного варианта осуществления предусмотрены четыре подъемные колонны 5, которые могут быть использованы для приведения корпуса 2 машины в заданную плоскость, продолжающуюся преимущественно параллельно поверхности 6 дороги, которая поддерживает приводные узлы на гусеничном ходу ходовой части 4.
Машина для измельчения дорожного покрытия, показанная на фиг. 1, содержит, в продольном направлении машины 1а для измельчения, рабочий барабан 22 между приводными узлами на гусеничном ходу ходовой части 4.
Машины 1а, 1b для измельчения могут содержать приводные узлы на гусеничном ходу и/или колеса. Рабочий барабан может быть выполнен с возможностью регулирования по высоте посредством подъемных колонн 5, поддерживающих корпус 2 машины, или относительно корпуса 2 машины.
Другие типы машины 1b для измельчения могут также содержать рабочий барабан 22, например, на высоте задних приводных узлов на гусеничном ходу или колес ходовой части 4.
Транспортировочное конвейерное устройство с по меньшей мере одним транспортировочным конвейером 11, 12 для удаления измельченного материала может быть также расположено в переднем конце 7 или в заднем конце 8 машины 1а, 1b для измельчения.
Фиг. 2 показывает машину 1b для измельчения с задней загрузкой в качестве примера, в котором транспортное средство 10 движется позади машины для измельчения задним ходом.
При наличии достаточного пространства сбоку рядом с машиной 1а, 1b для измельчения, транспортное средство 10 можно также перемещать рядом с машиной 1 для измельчения передним ходом, как показано на фиг. 3.
На фиг. 1-3 направления перемещения соответствующих транспортных средств показаны стрелками.
В варианте осуществления, показанном на фиг. 1, измельченный материал, измельченный посредством рабочего барабана 22, выгружают на загрузочную поверхность 15 транспортного средства 10 посредством первого прочно установленного транспортировочного конвейера 11 транспортировочного конвейерного устройства, который передает измельченный материал 14 на второй поворотный транспортировочный конвейер 12. В результате скорости транспортировочного конвейера 12, измельченный материал 14 не выгружается непосредственно в конце транспортировочного конвейера 12, а перемещается по параболической траектории так, что точка падения 16 на загрузочной поверхности 15 расположена на расстоянии от свободного конца 13 транспортировочного конвейера 12. Транспортировочный конвейер 12 выполнен с возможностью поворота из нейтрального положения влево или вправо посредством узлов 18 поршень-цилиндр, чтобы обеспечить выгрузку измельченного материала 14 на загрузочную поверхность 15 даже при движении на повороте или в случае движения транспортного средства 10 в смещенной колее. Кроме того, водитель транспортного средства машины 1а, 1b для измельчения может регулировать угол возвышения транспортировочного конвейера 12 посредством узла 20 поршень-цилиндр. Угол возвышения, как и скорость подачи транспортировочного конвейера 12, оказывает влияние на параболическую траекторию измельченного материала 14 и на положение точки 16 падения.
Установленный в данный момент угол возвышения относительно горизонтальной первой оси 21 или угол поворота относительно вертикальной второй оси 23 соответственно передаются в систему 24 обнаружения и управления, дополнительно содержащую по меньшей мере один датчик 26, который непрерывно определяет положение загрузочной поверхности 15 и/или последнего или единственного транспортировочного конвейера 12, если смотреть в направлении транспортировки. Упомянутый датчик 26 может быть расположен либо на машине 1а, 1b для измельчения в конце, обращенном к транспортировочному конвейерному устройству, либо в свободном конце 13 транспортировочного конвейера 12.
Система 24 обнаружения и управления может быть встроена в контроллер 3 для осуществления перемещения и измельчения или может быть, как минимум, соединена с упомянутым контроллером, для того чтобы в случае необходимости также получать данные о скорости перемещения и/или зарегистрированном угле рулевого управления машины 1а, 1b для измельчения и скорости подачи транспортировочного конвейера 12.
Система 24 обнаружения и управления определяет изменяемое положение загрузочной поверхности 15 транспортного средства 10 и последнего или единственного транспортировочного конвейера 12, если смотреть в направлении транспортировки, относительно корпуса 2 машины, и непрерывно и автоматически управляет позиционированием точки 16 падения измельченного материала через угол поворота и/или угол возвышения и/или скорость подачи транспортировочного конвейерного устройства, так что выгружаемый измельченный материал 14 падает, как минимум, в пределах загрузочной поверхности 15. Как вариант, можно также непрерывно определять изменяемое положение загрузочной поверхности 15 транспортного средства 10 относительно последнего или единственного транспортировочного конвейера 12, если смотреть в направлении транспортировки, для того чтобы осуществлять операцию управления.
Система 24 обнаружения и управления может также выполнять задачу равномерного заполнения загрузочной поверхности 15. Для этой цели может быть предусмотрена программа загрузки для загрузки загрузочной поверхности 15 в соответствии с заданной системой. В данной конструкции, состояние заполнения загрузочной поверхности 15 может быть зарегистрировано и подвергнуто анализу посредством системы записи изображения, для того чтобы непрерывно управлять скоростью подачи и/или положением разгрузочного конца 13 последнего или единственного транспортировочного конвейера 12, если смотреть в направлении транспортировки, относительно загрузочной поверхности 15.
Управляющие данные для разных положений и/или точек 16 падения могут храниться в карте в соответствии с загрузочными поверхностями 15 разных транспортных средств 10 и/или в соответствии с разными условиями загрузки загрузочной поверхности 15. Такая память в карте может быть встроена в систему 24 обнаружения и управления или в контроллер 3. Управляющие данные относятся к углу поворота, углу возвышения и/или скорости подачи транспортировочного конвейера 12 для разных положений и/или точек 16 падения в пределах положения загрузочной поверхности 15, определяемого посредством системы 24 обнаружения и управления.
Система 24 обнаружения и управления непрерывно определяет положение загрузочной поверхности 15 и/или последнего или единственного транспортировочного конвейера 12, если смотреть в направлении транспортировки, посредством системы 28 записи изображения или неоптической электронной системы позиционирования, которая обеспечивает данные для определения положения загрузочной поверхности 15 относительно корпуса 2 машины или относительно последнего или единственного транспортировочного конвейера 12, если смотреть в направлении транспортировки. Информация, выдаваемая системой 28 записи изображения, может быть подвергнута оценке посредством известных по существу методов анализа изображения. Одним примером неоптической электронной системы позиционирования является система радиочастотной идентификации (RFID), которая дополнительно обеспечивает возможность идентификации конкретной загрузочной поверхности 15 конкретного транспортного средства 10.
При определении местоположения загрузочной поверхности 15 посредством RFID используются постоянно установленные RFID метки на транспортном средстве 10, в частности на загрузочной поверхности 15.
При определении местоположения с использованием узлов датчиков Bluetooth в качестве дополнительного неоптического метода определения местоположения, используют узлы датчиков, распределенные в пространстве в качестве меток, и измеряют силу поля сигналов, которая зависит от расстояния.
Само собой разумеется, что можно также использовать комбинацию разных методов определения местоположения.
Как правило, можно использовать оптические и квазиоптические (радио) методы измерения длины и угла, а также разные способы измерения времени для разностей времени и разностей времени распространения.
Система 24 обнаружения и управления может сравнивать данные для определения положения с данными заданного положения, для того чтобы, в случае каких-либо отклонений от данных заданного целевого положения, осуществлять непрерывное управление положением разгрузочного конца 13 и/или точки 16 падения измельченного материала 14 и/или управление скоростью подачи.
Данные целевого положения могут быть определены посредством процесса обучения в том смысле, что положения транспортных средств 1а, 1b, 10 изменяют в соответствии с реалистическими ситуациями, и параметры, требуемые для каждой такой ситуации, а именно угол поворота, угол возвышения и скорость подачи транспортировочного конвейера, сохраняют в памяти. Таким же образом может быть также создана программа загрузки. При этом могут учитываться изменения в управлении, появляющиеся, например, во время движения при повороте. В данном способе данные, считываемые посредством операции считывания, могут также отличаться, если транспортное средство 10 движется слева или справа около колеи измельчения или в колее измельчения машины 1а, 1b для измельчения.
Claims (26)
1. Автоматизированная машина (1а, 1b) для измельчения, содержащая
регулируемый по высоте корпус (2) машины,
контроллер (3) для осуществления перемещения и измельчения,
рабочий барабан (22),
поворотный последний или единственный транспортировочный конвейер (12) транспортировочного конвейерного устройства, расположенный впереди или позади рабочего барабана (22), если смотреть в направлении перемещения машины (1а, 1b) для измельчения,
при этом транспортировочный конвейер (12) выполнен с возможностью поворота, относительно корпуса (2) машины, вокруг, по существу, горизонтальной первой оси (21) под углом подъема, и в сторону вокруг второй оси (23), перпендикулярной первой оси (20), под углом поворота, и
при этом транспортировочный конвейер (12) выгружает измельченный материал при заданной скорости подачи в точку (16) падения на загрузочной поверхности (15) транспортного средства (10),
отличающаяся тем, что
контроллер (3) содержит систему (24) обнаружения и управления, которая непрерывно определяет изменяемое положение загрузочной поверхности (15) транспортного средства (10) и поворотного транспортировочного конвейера (12) относительно корпуса (2) машины, или изменяемое положение загрузочной поверхности (15) транспортного средства (10) относительно транспортировочного конвейера (12), и непрерывно управляет позиционированием точки (16) падения измельченного материала (14) автоматически через угол поворота и/или угол подъема и/или скорость подачи транспортировочного конвейерного устройства (12) таким образом, что выгружаемый измельченный материал (14) падает в центр загрузочной поверхности (15) или в другую заданную точку (16) падения в пределах загрузочной поверхности (15).
2. Машина по п.1, отличающаяся тем, что система (24) обнаружения и управления содержит по меньшей мере один датчик (26), который непрерывно определяет положение загрузочной поверхности (15) и/или транспортировочного конвейера (12), и/или содержит дополнительные датчики, которые определяют угол поворота, угол подъема и/или скорость подачи транспортировочного конвейерного устройства (12).
3. Машина по п.1, отличающаяся тем, что система (24) обнаружения и управления непрерывно определяет положение загрузочной поверхности (15) и/или транспортировочного конвейера (12) посредством первой системы (28) записи изображения или неоптической электронной системы позиционирования, в частности системы радиочастотной идентификации (RFID), которая обеспечивает данные для определения положения загрузочной поверхности (15) относительно корпуса (2) машины или относительно транспортировочного конвейера (12).
4. Машина по п.3, отличающаяся тем, что система (24) обнаружения и управления сравнивает данные для определения положения с данными заданного целевого положения, для того чтобы, в случае каких-либо отклонений от данных заданного целевого положения, осуществлять непрерывное управление положением для положения разгрузочного конца (13) транспортировочного конвейерного устройства (12) и/или точки (16) падения и/или управление скоростью для скорости подачи в соответствии с заданной точкой (16) падения.
5. Машина по п.3, отличающаяся тем, что система записи изображения или датчик для системы радиочастотной идентификации (RFID) расположен в разгрузочном конце (13) единственного или последнего транспортировочного конвейера (12), если смотреть в направлении подачи измельченного материала (14).
6. Машина по п.1, отличающаяся тем, что система (24) обнаружения и управления выдает сигнал до или после в случае какого-либо отклонения, неисправимого посредством управления положением загрузочной поверхности (15) относительно положения транспортировочного конвейера (12) и/или корпуса (2) машины.
7. Машина по п.1, отличающаяся тем, что управляющие данные для угла поворота, угла подъема и/или скорости подачи хранятся в карте в соответствии с загрузочными поверхностями (15) разных транспортных средств (10) и/или в соответствии с разными условиями загрузки загрузочной поверхности (15) для разных положений и/или точек (16) падения в пределах положения загрузочной поверхности (15), определяемого посредством системы (24) обнаружения и управления.
8. Машина по п.1, отличающаяся тем, что по меньшей мере одна точка, по существу, прямоугольной загрузочной поверхности (15) или, по существу, кубовидной загрузочной емкости (15) содержит метку, обнаруживаемую посредством системы (24) обнаружения и управления.
9. Способ выгрузки удаленного измельченного материала (14) из автоматизированной машины (1а, 1b) для измельчения в точку (16) падения на загрузочной поверхности (15) транспортного средства (10), в котором
осуществляют управление машиной (1а, 1b) для измельчения для осуществления перемещения и измельчения,
выгружают измельченный материал (14), удаленный посредством рабочего барабана, на загрузочную поверхность (15) транспортного средства (10) при заданной скорости подачи посредством транспортировочного конвейерного устройства, расположенного впереди или позади рабочего барабана, если смотреть в направлении перемещения машины (1а, 1b) для измельчения, и
при этом последний или единственный транспортировочный конвейер (12) транспортировочного конвейерного устройства выполнен с возможностью поворота в сторону относительно корпуса (2) машины (1а, 1b) для измельчения на угол поворота и, по высоте выгрузки, с возможностью регулирования под углом подъема,
отличающийся тем, что
изменяемое положение загрузочной поверхности (15) транспортного средства (10) и транспортировочного конвейера (12) относительно корпуса (2) машины или изменяемое положение загрузочной поверхности (15) транспортного средства (10) относительно транспортировочного конвейера (12) непрерывно определяют посредством системы (24) обнаружения и управления, а позиционированием точки (16) падения измельченного материала (14) автоматически непрерывно управляют посредством системы (24) обнаружения и управления через угол поворота, и/или угол подъема, и/или скорость подачи транспортировочного конвейерного устройства (12) таким образом, что измельченный материал выгружается в центр загрузочной поверхности (15) или в другую заданную точку (16) падения в пределах загрузочной поверхности (15).
10. Способ по п.9, отличающийся тем, что непрерывно определяют положение загрузочной поверхности (15) и/или транспортировочного конвейера (12), при этом получают данные для определения положения загрузочной поверхности (15) относительно корпуса (2) машины или относительно транспортировочного конвейера (12) и сравнивают с хранимыми данными целевого положения, а затем управляют положением разгрузочного конца (13) транспортировочного конвейера (12), и/или скоростью подачи транспортировочного конвейера, (12) и/или положением транспортного средства (10) в случае обнаружения каких-либо отклонений, при этом данные целевого положения, предпочтительно, определяют посредством процесса обучения.
11. Способ по п.9, отличающийся тем, что состояние заполнения загрузочной поверхности (15) определяют и подвергают анализу посредством системы записи изображения и непрерывно управляют скоростью подачи транспортировочного конвейера (12) и/или положением разгрузочного конца (13) транспортировочного конвейера (12) относительно загрузочной поверхности (15) для того, чтобы загружать загрузочную поверхность (15) равномерно и/или в соответствии с заданной программой загрузки.
12. Способ по п.9, отличающийся тем, что загрузочную поверхность (15) размещают, а положение и скорость подачи транспортировочного конвейера (12) регулируют таким образом, что точка (16) падения на загрузочной поверхности (15) всегда поддерживается в положении, заданном контроллером (3), независимо от перемещений машины (1а, 1b) для измельчения и транспортного средства (10).
13. Способ по п.9, отличающийся тем, что положение геометрического центра загрузочной поверхности (15) определяют посредством анализа изображений или посредством неоптической системы позиционирования, а положение текущей точки (16) падения на загрузочную поверхность (15) определяют посредством анализа изображений, и позиционное управление для положения разгрузочного конца (13) транспортировочного конвейера (12) и/или для точки (16) падения, и управление скоростью подачи транспортировочного конвейера (12) осуществляют в соответствии с требуемым положением точки (16) падения так, что осуществляется непрерывное регулирование положения текущей точки (16) падения.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102012215013.7 | 2012-08-23 | ||
| DE102012215013.7A DE102012215013A1 (de) | 2012-08-23 | 2012-08-23 | Selbstfahrende Fräsmaschine, sowie Verfahren zum Abladen von Fräsgut |
| PCT/EP2013/067418 WO2014029824A1 (de) | 2012-08-23 | 2013-08-21 | Selbstfahrende fräsmaschine, sowie verfahren zum abladen von fräsgut |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2015109939A RU2015109939A (ru) | 2016-10-20 |
| RU2610042C2 true RU2610042C2 (ru) | 2017-02-07 |
Family
ID=49029098
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2015109939A RU2610042C2 (ru) | 2012-08-23 | 2013-08-21 | Автоматизированная машина для измельчения, а также способ выгрузки измельченного материала |
Country Status (9)
| Country | Link |
|---|---|
| US (4) | US20150218762A1 (ru) |
| EP (2) | EP2888409B1 (ru) |
| JP (1) | JP6050493B2 (ru) |
| CN (2) | CN203700926U (ru) |
| AU (1) | AU2013305023B2 (ru) |
| CA (1) | CA2882583C (ru) |
| DE (1) | DE102012215013A1 (ru) |
| RU (1) | RU2610042C2 (ru) |
| WO (1) | WO2014029824A1 (ru) |
Families Citing this family (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013214675A1 (de) | 2013-07-26 | 2015-01-29 | Wirtgen Gmbh | Selbstfahrende Straßenfräsmaschine, sowie Verfahren zum Abfräsen und Abtransportieren eines abgefrästen Materialstroms |
| DE102014216603B4 (de) | 2014-08-21 | 2018-02-22 | Wirtgen Gmbh | Selbstfahrende Fräsmaschine, sowie Verfahren zum Abladen von Fräsgut |
| DE102014216763B4 (de) | 2014-08-22 | 2018-07-26 | Wirtgen Gmbh | Selbstfahrende Fräsmaschine, sowie Verfahren zum Abladen von Fräsgut |
| DE102014216713B4 (de) | 2014-08-22 | 2018-09-06 | Wirtgen Gmbh | Selbstfahrende Fräsmaschine, sowie Verfahren zum Abladen von Fräsgut |
| DE102014012825A1 (de) * | 2014-08-28 | 2016-03-03 | Wirtgen Gmbh | Selbstfahrende Baumaschine und Verfahren zur Steuerung einer selbstfahrenden Baumaschine |
| US9464391B2 (en) * | 2014-08-29 | 2016-10-11 | Caterpillar Paving Products Inc. | Cold planer having independently controlled conveyors |
| CN104328733B (zh) * | 2014-10-20 | 2016-06-15 | 芜湖市泰能电热器具有限公司 | 一种破碎机 |
| CN105692067A (zh) * | 2014-11-25 | 2016-06-22 | 无锡市洗选设备厂 | 洗砂机的扭转式拐角输送结构 |
| CN105692099A (zh) * | 2014-11-25 | 2016-06-22 | 无锡市洗选设备厂 | 洗砂机的智能拐角输送装置 |
| CN105692098A (zh) * | 2014-11-25 | 2016-06-22 | 无锡市洗选设备厂 | 偏角信号采集式砂石输送装置 |
| CN105692119A (zh) * | 2014-11-25 | 2016-06-22 | 无锡市洗选设备厂 | 砂石纠偏信号采集式输送装置 |
| CN105692100A (zh) * | 2014-11-25 | 2016-06-22 | 无锡市洗选设备厂 | 洗砂机的拐角弹性输送结构 |
| CN105692101A (zh) * | 2014-11-25 | 2016-06-22 | 无锡市洗选设备厂 | 洗砂机的输送装置 |
| US9938674B2 (en) * | 2015-05-27 | 2018-04-10 | Caterpillar Paving Products Inc. | Cold planer transport payload monitoring system |
| US10380529B2 (en) * | 2015-08-17 | 2019-08-13 | Caterpillar Paving Products Inc. | Cold planer material transport management system |
| EP3165078B1 (en) * | 2015-11-06 | 2020-04-22 | Exel Industries | Crop transfer device and corresponding method |
| US9879386B2 (en) * | 2015-12-10 | 2018-01-30 | Caterpillar Paving Products Inc. | System for coordinating milling and paving machines |
| CN108473260B (zh) | 2016-01-21 | 2022-08-12 | 维特根有限公司 | 包括建筑机械、具有装载空间的运输车辆和图像记录装置的系统以及用于在运输车辆的装载或卸载期间显示图像流的方法 |
| DE102016222145A1 (de) | 2016-11-11 | 2018-05-17 | Wirtgen Gmbh | System und Verfahren zum Nachverfolgen von Fräsgut |
| US10927513B2 (en) | 2016-11-11 | 2021-02-23 | Wirtgen Gmbh | System and method for the tracking of milling material |
| DE102016223454A1 (de) | 2016-11-25 | 2018-05-30 | Wirtgen Gmbh | System und Verfahren zum Nachverfolgen von Fräsgut |
| DE102016222589B4 (de) | 2016-11-16 | 2020-01-16 | Wirtgen Gmbh | Selbstfahrende Fräsmaschine, sowie Verfahren zum Steuern einer selbstfahrenden Fräsmaschine |
| DE102017000211A1 (de) | 2017-01-13 | 2018-07-19 | Dynapac Gmbh | Straßenbaumaschine und Verfahren zum Betreiben einer Straßenbaumaschine |
| CN107642023B (zh) * | 2017-08-12 | 2020-10-09 | 芜湖习科控制系统有限公司 | 一种铣刨机用多功能输送装置 |
| DE102017220869A1 (de) | 2017-11-22 | 2019-05-23 | Wirtgen Gmbh | Selbstfahrende Fräsmaschine, Verfahren zum automatischen Beladen eines Transportmittels mit Fräsgut, sowie Straßen- oder Bodenbearbeitungseinheit |
| CN108221610A (zh) * | 2018-03-14 | 2018-06-29 | 徐州徐工筑路机械有限公司 | 一种基于视觉识别的铣刨机自动输料系统 |
| US11149407B2 (en) | 2018-12-06 | 2021-10-19 | Caterpillar Inc. | Earth-moving machinery collision threat filtering |
| DE102019104218A1 (de) | 2019-02-19 | 2020-08-20 | Wirtgen Gmbh | Arbeitszug, umfassend eine Bodenbearbeitungsmaschine und ein weiteres Fahrzeug sowie eine automatisierte Abstandsüberwachung |
| CN110884867B (zh) * | 2019-09-05 | 2022-01-14 | 世邦工业科技集团股份有限公司 | 一种二维打印式装车系统和卸料方法 |
| US11014753B1 (en) | 2019-11-07 | 2021-05-25 | Caterpillar Paving Products Inc. | Trajectory control of discharge conveyor |
| DE102020001163A1 (de) * | 2020-02-21 | 2021-08-26 | Bomag Gmbh | Materialübergabevorrichtung für eine bodenfräsmaschine und bodenfräsmaschine mit derartiger materialübergabevorrichtung |
| CN111576897B (zh) * | 2020-05-15 | 2021-09-21 | 湖北晶骉建设工程有限公司 | 一种市政勾缝器 |
| US11845622B2 (en) * | 2020-12-11 | 2023-12-19 | Caterpillar Paving Products Inc. | Truck measurement of a milling machine |
| DE102021114706A1 (de) | 2021-06-08 | 2022-12-08 | Wirtgen Gmbh | Selbstfahrende Fräsmaschine mit einem Maschinenrahmen und einer Fördereinrichtung zum Abführen von Material |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0666018A1 (de) * | 1994-02-08 | 1995-08-09 | CLAAS Kommanditgesellschaft auf Aktien | Vorrichtung zur automatischen Befüllung von Ladebehältern |
| EP1344445A1 (en) * | 2002-03-13 | 2003-09-17 | Deere & Company | Image processing spout control system |
| DE202007005756U1 (de) * | 2007-04-19 | 2008-08-28 | Wirtgen Gmbh | Selbstfahrende Baumaschine |
| RU2394122C1 (ru) * | 2006-04-27 | 2010-07-10 | Виртген Гмбх | Машина для дорожного строительства, выравнивающее устройство, а также способ управления глубиной фрезерования или уклоном фрезерования машины для дорожного строительства |
Family Cites Families (54)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE155157C (ru) | 1904-11-01 | |||
| US3608968A (en) | 1969-04-03 | 1971-09-28 | Christensen Diamond Prod Co | Pavement cutting and water and cutting pickup apparatus |
| US4221434A (en) | 1978-03-23 | 1980-09-09 | Cmi Corporation | Roadway breaker plate for a planar apparatus |
| US4376609A (en) | 1980-03-31 | 1983-03-15 | Sperry Corporation | Automatic spout control for agricultural machines |
| DD155157A1 (de) | 1980-12-09 | 1982-05-19 | Bernd Kaempfe | Positioniereinrichtung,insbesondere zwischen erntemaschinen und transportfahrzeugen |
| JPS61257118A (ja) * | 1985-05-10 | 1986-11-14 | 井関農機株式会社 | コンバインにおける揚穀筒の自動調節装置 |
| EP0245544A3 (en) | 1986-03-11 | 1988-03-23 | Cellutane Co Ltd | Method and apparatus for continuously producing sheet-like products from waste plastics |
| DE3843480A1 (de) | 1988-09-13 | 1990-03-22 | Egon Unterbusch | Netzunabhaengiges kennzeichen |
| US4863009A (en) | 1988-11-14 | 1989-09-05 | Alberta Energy Company Ltd. | Control system for an endless belt conveyor train |
| DE19504495A1 (de) | 1995-02-12 | 1996-08-22 | Wirtgen Gmbh | Maschine zur Erneuerung von Fahrbahnen |
| DE19531662A1 (de) * | 1995-08-29 | 1997-03-06 | Claas Ohg | Vorrichtung zum automatischen Befüllen von Ladebehältern |
| JPH0986672A (ja) * | 1995-09-25 | 1997-03-31 | San Eng:Kk | 定重量積載装置 |
| DE19628420C2 (de) | 1996-07-15 | 1999-07-29 | Krupp Foerdertechnik Gmbh | Verfahren zum Materialabbau mittels eines Schaufelradbaggers |
| DE29617116U1 (de) * | 1996-10-01 | 1996-11-21 | Voegele Ag J | Einbauzug |
| JPH1150415A (ja) * | 1997-08-04 | 1999-02-23 | Sakai Heavy Ind Ltd | 運搬車輛の誘導システム |
| WO1999052068A1 (en) | 1998-04-03 | 1999-10-14 | Koninklijke Philips Electronics N.V. | Image processing method and system involving contour detection steps |
| DE19848127A1 (de) | 1998-10-19 | 2000-04-20 | Claas Selbstfahr Erntemasch | Vorrichtung zur Steuerung einer Überladeeinrichtung |
| US6682416B2 (en) | 2000-12-23 | 2004-01-27 | Claas Selbstfahrende Erntemaschinen Gmbh | Automatic adjustment of a transfer device on an agricultural harvesting machine |
| DE10203732A1 (de) | 2002-01-30 | 2003-08-21 | Wirtgen Gmbh | Baumaschine |
| DE10357074B3 (de) | 2003-12-04 | 2005-05-19 | Wirtgen Gmbh | Selbstfahrende Maschine zum Herstellen von Fahrbahnen |
| DE102004007716B3 (de) | 2004-02-16 | 2005-06-16 | Wirtgen Gmbh | Fräsmaschine sowie Verfahren zum Bearbeiten von Bodenoberflächen |
| DE102004011789A1 (de) | 2004-03-09 | 2005-09-29 | Claas Selbstfahrende Erntemaschinen Gmbh | Vorrichtung zum Erfassen eines Ladewagens |
| US20060045621A1 (en) | 2004-08-27 | 2006-03-02 | Caterpillar Paving Products Inc. | Asphalt-removing work machine having a storage bin |
| DE102005035480A1 (de) * | 2005-07-26 | 2007-02-01 | Cft Gmbh Compact Filter Technic | Fräsmaschine für Straßenbeläge mit Entstaubung |
| FI120191B (fi) | 2005-10-03 | 2009-07-31 | Sandvik Tamrock Oy | Menetelmä kaivosajoneuvojen ajamiseksi kaivoksessa ja kuljetusjärjestelmä |
| US7976238B2 (en) | 2006-12-01 | 2011-07-12 | Hall David R | End of a moldboard positioned proximate a milling drum |
| US20080153402A1 (en) * | 2006-12-20 | 2008-06-26 | Christopher Arcona | Roadway grinding/cutting apparatus and monitoring system |
| DE102006062129B4 (de) * | 2006-12-22 | 2010-08-05 | Wirtgen Gmbh | Straßenbaumaschine sowie Verfahren zur Messung der Frästiefe |
| DE102007009666A1 (de) | 2007-02-22 | 2008-08-28 | Carl Zeiss Microimaging Gmbh | Anordnung zum Befüllen eines Behälters mit Schüttgut |
| US8408838B2 (en) | 2007-03-20 | 2013-04-02 | Volvo Construction Equipment Ab | Milling machine with cutter drum speed control |
| DE102007016670A1 (de) * | 2007-04-04 | 2008-10-09 | Claas Selbstfahrende Erntemaschinen Gmbh | Selbstfahrende landwirtschaftliche Erntemaschine mit steuerbarer Überladeeinrichtung |
| ATE546991T1 (de) * | 2007-08-03 | 2012-03-15 | Agrocom Gmbh & Co Agrarsystem Kg | Landwirtschaftliche arbeitsmaschine |
| DE102007038677B4 (de) | 2007-08-15 | 2009-09-17 | Wirtgen Gmbh | Abstreifeinrichtung, sowie Baumaschine |
| DE102008008260B4 (de) | 2008-02-08 | 2010-09-09 | Wirtgen Gmbh | Steuerung einer Gewinnungsmaschine und Gewinnungsmaschine |
| EP2088196A1 (en) | 2008-02-08 | 2009-08-12 | Boehringer Ingelheim RCV GmbH & Co KG | Methods and devices for producing biomolecules |
| DE102008014001A1 (de) | 2008-03-13 | 2009-09-17 | Claas Selbstfahrende Erntemaschinen Gmbh | Landwirtschaftliche Erntemaschine mit einer Überladeeinrichtung |
| CN201190259Y (zh) * | 2008-04-24 | 2009-02-04 | 镇江华晨华通路面机械有限公司 | 路面铣刨机排料速度自动控制装置 |
| DE102008021484B4 (de) * | 2008-04-29 | 2010-01-28 | Wirtgen Gmbh | Knickbares Transportband für eine Baumaschine, selbstfahrende Baumaschine und Verfahren zum Verschwenken eines Transportbandes |
| ATE550922T1 (de) * | 2008-06-25 | 2012-04-15 | Claas Agrosystems Gmbh & Co Kg | Übertragungsvorrichtung und landwirtschaftliches fahrzeug |
| US8180534B2 (en) * | 2008-09-18 | 2012-05-15 | Deere & Company | Multiple harvester unloading system |
| DE102009008884A1 (de) | 2009-02-14 | 2010-08-26 | Wirtgen Gmbh | Stabilisierer oder Recycler |
| EP2256246B1 (de) | 2009-05-20 | 2018-07-04 | Joseph Vögele AG | Einbauzug zum erstellen eines Strassenbelags |
| PL2311307T3 (pl) | 2009-09-07 | 2012-09-28 | Claas E Systems Gmbh | Wskaźnik stopnia napełnienia, pojazd rolniczy zawierający taki wskaźnik oraz sposób kontroli napełniania obszaru docelowego |
| ATE533350T1 (de) | 2009-09-07 | 2011-12-15 | Claas Agrosystems Gmbh & Co Kg | Steuerungssystem eines landwirtschaftlichen fahrzeugs mit einem güterträger, landwirtschaftliches fahrzeug und verfahren zur steuerung eines güterträgers des landwirtschaftlichen fahrzeugs |
| DE102009041842A1 (de) * | 2009-09-18 | 2011-09-01 | Wirtgen Gmbh | Selbstfahrende Straßenfräsmaschine |
| US10537061B2 (en) * | 2010-02-26 | 2020-01-21 | Cnh Industrial America Llc | System and method for controlling harvest operations |
| US8380401B2 (en) | 2010-06-09 | 2013-02-19 | Cnh America Llc | Automatic grain transfer control system based on real time modeling of a fill level profile for regions of the receiving container |
| WO2012016573A1 (en) | 2010-08-03 | 2012-02-09 | Marini S.P.A. | Guiding system for milling machine mouldboard designed to leave the milled material in a high layer on the milled surface |
| DE102010050831A1 (de) | 2010-11-09 | 2012-05-10 | Bomag Gmbh | Rotorhaube für eine Fräsvorrichtung |
| DE102010043854B4 (de) | 2010-11-12 | 2016-01-14 | Deere & Company | Steueranordnung zur Kontrolle des Überladens landwirtschaftlichen Ernteguts von einer Erntemaschine auf ein Transportfahrzeug |
| DE102010051551A1 (de) | 2010-11-18 | 2012-05-24 | Wirtgen Gmbh | Bodenbearbeitungsmaschine sowie Verfahren zum Fräsen von Böden oder Verkehrsflächen |
| DE102011114185A1 (de) | 2011-09-22 | 2013-03-28 | Bomag Gmbh | Arbeitszug mit einer Fräsvorrichtung und einer Transporteinrichtung mit einer Sensoreinrichtung zur Abstandsüberwachung, Fräsvorrichtung mit einer Sensoreinrichtung und Verfahren zur Abstandsüberwachung bei einem Arbeitszug |
| DE102011114183A1 (de) | 2011-09-22 | 2013-03-28 | Bomag Gmbh | Verfahren zur Steuerung eines Beladungsvorgangs eines Transportfahrzeugs mit Fräsgut, Vorrichtung zur Durchführung eines solchen Verfahrens und Fräsvorrichtung |
| DE102012012395A1 (de) | 2012-06-25 | 2014-01-02 | Wirtgen Gmbh | Straßenfräsmaschine |
-
2012
- 2012-08-23 DE DE102012215013.7A patent/DE102012215013A1/de active Pending
-
2013
- 2013-08-21 RU RU2015109939A patent/RU2610042C2/ru active
- 2013-08-21 JP JP2015527911A patent/JP6050493B2/ja active Active
- 2013-08-21 WO PCT/EP2013/067418 patent/WO2014029824A1/de active Application Filing
- 2013-08-21 EP EP13752630.7A patent/EP2888409B1/de active Active
- 2013-08-21 AU AU2013305023A patent/AU2013305023B2/en active Active
- 2013-08-21 EP EP17204074.3A patent/EP3342932B1/de active Active
- 2013-08-21 US US14/422,238 patent/US20150218762A1/en not_active Abandoned
- 2013-08-21 CA CA2882583A patent/CA2882583C/en active Active
- 2013-08-23 CN CN201320520835.0U patent/CN203700926U/zh not_active Expired - Lifetime
- 2013-08-23 CN CN201310373847.XA patent/CN103628398B/zh active Active
-
2016
- 2016-01-19 US US15/000,161 patent/US9915043B2/en active Active
-
2018
- 2018-03-07 US US15/913,971 patent/US10400400B2/en active Active
-
2019
- 2019-08-21 US US16/546,949 patent/US10947677B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0666018A1 (de) * | 1994-02-08 | 1995-08-09 | CLAAS Kommanditgesellschaft auf Aktien | Vorrichtung zur automatischen Befüllung von Ladebehältern |
| EP1344445A1 (en) * | 2002-03-13 | 2003-09-17 | Deere & Company | Image processing spout control system |
| RU2394122C1 (ru) * | 2006-04-27 | 2010-07-10 | Виртген Гмбх | Машина для дорожного строительства, выравнивающее устройство, а также способ управления глубиной фрезерования или уклоном фрезерования машины для дорожного строительства |
| DE202007005756U1 (de) * | 2007-04-19 | 2008-08-28 | Wirtgen Gmbh | Selbstfahrende Baumaschine |
Also Published As
| Publication number | Publication date |
|---|---|
| US10400400B2 (en) | 2019-09-03 |
| CN203700926U (zh) | 2014-07-09 |
| US20200109528A1 (en) | 2020-04-09 |
| WO2014029824A1 (de) | 2014-02-27 |
| EP3342932A1 (de) | 2018-07-04 |
| DE102012215013A1 (de) | 2014-02-27 |
| CN103628398B (zh) | 2017-05-17 |
| CA2882583A1 (en) | 2014-02-27 |
| US20180258596A1 (en) | 2018-09-13 |
| US9915043B2 (en) | 2018-03-13 |
| EP2888409A1 (de) | 2015-07-01 |
| US20150218762A1 (en) | 2015-08-06 |
| EP2888409B1 (de) | 2017-11-29 |
| RU2015109939A (ru) | 2016-10-20 |
| JP6050493B2 (ja) | 2016-12-21 |
| JP2015529762A (ja) | 2015-10-08 |
| US10947677B2 (en) | 2021-03-16 |
| EP3342932B1 (de) | 2021-06-30 |
| AU2013305023B2 (en) | 2016-11-24 |
| AU2013305023A1 (en) | 2015-03-12 |
| CA2882583C (en) | 2018-03-13 |
| CN103628398A (zh) | 2014-03-12 |
| US20160208447A1 (en) | 2016-07-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2610042C2 (ru) | Автоматизированная машина для измельчения, а также способ выгрузки измельченного материала | |
| RU2631747C2 (ru) | Самоходная фрезерная машина, а также способ выгрузки сфрезерованного материала | |
| US9873993B2 (en) | Automotive milling machine, as well as method for steering an automotive milling machine | |
| RU2611802C2 (ru) | Самоходная фрезерная машина и способ выгрузки сфрезерованного материала | |
| RU2620675C2 (ru) | Самоходная фрезерная машина, а также способ отвода сфрезерованного материала |