RU2452385C2 - Получение компьютерно-томографических изображений - Google Patents
Получение компьютерно-томографических изображений Download PDFInfo
- Publication number
- RU2452385C2 RU2452385C2 RU2009109428/14A RU2009109428A RU2452385C2 RU 2452385 C2 RU2452385 C2 RU 2452385C2 RU 2009109428/14 A RU2009109428/14 A RU 2009109428/14A RU 2009109428 A RU2009109428 A RU 2009109428A RU 2452385 C2 RU2452385 C2 RU 2452385C2
- Authority
- RU
- Russia
- Prior art keywords
- detector
- radiation
- view
- transverse
- source
- Prior art date
Links
- 230000005855 radiation Effects 0.000 claims abstract description 53
- 238000002591 computed tomography Methods 0.000 claims abstract description 31
- 238000000034 method Methods 0.000 claims abstract description 26
- 238000006073 displacement reaction Methods 0.000 claims abstract description 16
- 238000013480 data collection Methods 0.000 claims description 10
- 230000007704 transition Effects 0.000 claims description 6
- 230000008859 change Effects 0.000 claims description 3
- 238000004891 communication Methods 0.000 claims description 2
- 239000003814 drug Substances 0.000 abstract description 2
- 230000000694 effects Effects 0.000 abstract description 2
- 230000015572 biosynthetic process Effects 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- 238000012800 visualization Methods 0.000 description 10
- 238000013461 design Methods 0.000 description 4
- 238000003384 imaging method Methods 0.000 description 3
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 210000004556 brain Anatomy 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000010603 microCT Methods 0.000 description 1
- 238000009659 non-destructive testing Methods 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/58—Testing, adjusting or calibrating thereof
- A61B6/587—Alignment of source unit to detector unit
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
- A61B6/032—Transmission computed tomography [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/44—Constructional features of apparatus for radiation diagnosis
- A61B6/4429—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units
- A61B6/4435—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units the source unit and the detector unit being coupled by a rigid structure
- A61B6/4441—Constructional features of apparatus for radiation diagnosis related to the mounting of source units and detector units the source unit and the detector unit being coupled by a rigid structure the rigid structure being a C-arm or U-arm
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/027—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis characterised by the use of a particular data acquisition trajectory, e.g. helical or spiral
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/40—Arrangements for generating radiation specially adapted for radiation diagnosis
- A61B6/4021—Arrangements for generating radiation specially adapted for radiation diagnosis involving movement of the focal spot
- A61B6/4028—Arrangements for generating radiation specially adapted for radiation diagnosis involving movement of the focal spot resulting in acquisition of views from substantially different positions, e.g. EBCT
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/42—Arrangements for detecting radiation specially adapted for radiation diagnosis
- A61B6/4291—Arrangements for detecting radiation specially adapted for radiation diagnosis the detector being combined with a grid or grating
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/50—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications
- A61B6/508—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications for non-human patients
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Radiology & Medical Imaging (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Physics & Mathematics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- High Energy & Nuclear Physics (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Pulmonology (AREA)
- Theoretical Computer Science (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
Abstract
Изобретение относится к компьютерной томографии. Устройство для сбора данных томографических проекций во множестве угловых положений относительно объекта, расположенного в области исследования, содержит источник излучения, детектор, при этом источник и поперечный центр детектора поперечно смещены от центра поперечного поля обзора во время сбора данных проекций, причем направление поперечного смещения является тангенциальным относительно поперечного поля обзора. Способ компьютерной томографии содержит этапы, на которых испускают первое излучение из позиции, которая поперечно смещена от центра поперечного поля обзора, используют детектор излучения для сбора данных компьютерно-томографических проекций, повторяют этапы испускания первого излучения и использования детектора излучения для сбора данных компьютерно-томографических проекций и реконструируют первое множество СТ данных для формирования первых объемных данных. Компьютерное томографическое устройство содержит рентгеновский источник, поперечно смещенный от оси вращения, рентгеновский детектор, также поперечно смещенный от оси вращения и поворачивающийся относительно оси вращения в состоянии постоянной механической связи с рентгеновским источником. При этом рентгеновский источник испускает излучение, характеризующееся поперечным углом веерного пучка, а полное взятие угловых отсчетов поперечного поля обзора требует сбора данных проекций в большем угловом диапазоне, чем 180° плюс угол веерного пучка. Устройство содержит также блок реконструкции данных проекций для формирования объемных данных, характеризующих поперечное поле обз�
Description
Настоящее изобретение относится к компьютерной томографии (СТ). Настоящее изобретение находит применение, в частности, в рентгеновской СТ для медицинских целей. Настоящее изобретение находит применение при контроле изделий и безопасности, неразрушающем контроле, доклинической визуализации и в других ситуациях, в которых СТ-данные (данные компьютерной томографии) могут предоставлять полезную информацию о структуре или функции объекта.
Одна из областей, в которой СТ-системы (компьютерно-томографические системы) визуализации получили широкое распространение, является медициной, где СТ-сканеры (компьютерно-томографические сканеры) широко применяются рентгенологами и другими медицинскими специалистами в связи с диагностикой и лечением заболеваний. Многослойные системы, принятые сравнительно недавно, дополнительно расширили диапазон клинического применения СТ-систем.
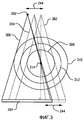
Геометрия сбора данных традиционной рентгеновской СТ-системой третьего поколения, содержащей плоский детектор, представлена на фигуре 1А. На фигуре 1А показана трансаксиальная плоскость системы, например центральная плоскость системы с коническим пучком. Рентгеновский источник 102 и рентгеночувствительный детектор 104 расположены с противоположных сторон области 106 исследования и радиально расположены от оси 114 вращения. Пациент или другой объект 108, подлежащий исследованию, опирается в области 106 исследования на подходящую опору 110. Источник 102 испускает излучение 112, которое пересекает область 106 исследования и регистрируется детектором 104 по мере того, как источник 102 и детектор 104 поворачиваются вокруг оси 114 вращения.
В показанной геометрической схеме с захватом всего пучка, центральный луч или проекция 116 рентгеновского пучка 112 пересекает ось 114 вращения и перпендикулярен к детектору в поперечном центре 119. Поперечный размер 120 детектора является таким, что детектор 104 регистрирует излучение 112, которое пересекло все поперечное FOV (поле обзора) 118 под каждым углом проекции. Таким образом, полное взятие угловых отсчетов поперечного FOV по углу около 180°, плюс по поперечному углу веерного рентгеновского пучка. Хотя геометрическая схема показана для плоского детектора, следует понимать, что геометрическая схема с захватом всего пучка применима также к системам, в которых детектор 104 имеет, в общем, дугообразную форму.
Однако, в общем, желательно уменьшать физический размер детектора, необходимый для достижения заданного поперечного FOV. Например, детекторы сравнительно большего размера обычно сложнее и дороже в изготовлении. Кроме того, размер имеющихся детекторных решеток может оказаться ограничивающим фактором при проектировании системы. Упомянутые соображения становятся особенно важными в связи с широким распространением многослойных систем, и, в частности, когда на относительно более крупные детекторы для многослойной съемки приходится большая часть общей стоимости системы.
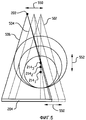
Предлагалась также геометрия с захватом половины пучка, показанная на фигуре 1В. Смотри, например, Gregor, et al., Conebeam X-ray Computed Tomography with an Offset Detector, IEEE 2003 (2003); Wang, et al., X-ray Micro-CT with a Displaced Detector Array, Med. Phys. 29 (7), July 2002; Lin, et al., Half Field of View Reduced-Size CT Detector, PCT публикация WO 00/62647, 26 октября 2000 г.
По сравнению с геометрией захвата всего пучка, детектор 104 сдвинут в поперечном направлении на, приблизительно, половину его поперечного размера 120. Луч или проекция 122, который пересекает ось 114 вращения, перпендикулярен плоскости детектора 104. При заданном угле проекции, детектор 104 регистрирует излучение, которое пересекает, приблизительно, половину поперечного FOV 118 (следует отметить, что совмещенная или переходная область 124 обеспечивает сбор данных проекций в центральной области поперечного FOV 118). Хотя геометрическая схема с захватом половины пучка обеспечивает относительно большее поперечное FOV по сравнению с геометрической схемой с захватом всего пучка (которая показана для сравнения пунктирными линиями на фигуре 1В), полное взятие угловых отсчетов поперечного FOV требует сбора данных в угловом диапазоне около 360°. Кроме того, упомянутая система нуждается в том, чтобы пластины или диафрагма антирассеивающей решетки продолжались в поперечном направлении или в применении специальной асимметричной антирассеивающей решетки.
Следовательно, возможность усовершенствований еще остается. Например, целесообразно дополнительно повысить степень использования детектора, при сохранении подходящего качества изображения. Целесообразно также упростить конструкцию системы.
Таким образом, цель настоящего изобретения состоит в обеспечении небольшого по размеру детектора для достижения заданного поперечного поля обзора.
Аспекты настоящего изобретения касаются упомянутых и других задач.
В соответствии с одним аспектом настоящего изобретения, устройство собирает данные томографических проекций во множестве угловых положений относительно объекта, расположенного в области исследования. Устройство содержит источник излучения и детектор, чувствительный к излучению, который регистрирует испускаемое источником излучение, которое пересекло область исследования. Как источник, так и поперечный центр детектора поперечно смещены относительно центра поперечного поля обзора во время сбора данных проекций.
В соответствии с другим аспектом, способ компьютерной томографии содержит этап, заключающийся в том, что испускают излучение из позиции, которая поперечно смещена относительно центра поперечного поля обзора. Излучение пересекает участок поперечного поля обзора. Способ содержит также этап, заключающийся в том, что используют детектор излучения для сбора данных компьютерно-томографических проекций, характеризующих излучение. Детектор поперечно смещен относительно центра поперечного поля обзора. Способ содержит также этап повторения этапов испускания и использования детектора излучения для сбора данных компьютерно-томографических проекций, характеризующих излучение под каждым из множества углов проекций для сбора множества СТ-данных, и этап реконструкции множества СТ-данных для формирования объемных данных.
В соответствии с другим аспектом, компьютерное томографическое устройство содержит рентгеновский источник, рентгеновский детектор и блок реконструкции. Рентгеновский источник поперечно смещен и поворачивается относительно оси вращения. Рентгеновский детектор регистрирует излучение, испускаемое рентгеновским источником, и поперечно смещен от оси вращения. Рентгеновский детектор поворачивается относительно оси вращения в состоянии постоянной механической связи с рентгеновским источником для сбора данных проекций под множеством углов проекций. Рентгеновский источник испускает излучение, характеризующееся поперечным углом веерного пучка, полное взятие угловых отсчетов поперечного поля обзора требует сбора данных проекций в большем угловом диапазоне, чем 180° плюс угол веерного пучка. Блок реконструкции реконструирует данные проекций для формирования объемных данных, характеризующих поперечное поле обзора.
Дополнительные аспекты настоящего изобретения станут очевидными специалистам со средним уровнем компетенции в данной области техники после прочтения и изучения нижеследующего подробного описания.
Изобретение можно реализовать в форме различных компонентов и схем расположения компонентов и в форме различных этапов и схем расположения этапов. Чертежи предназначены только для иллюстрации предпочтительных вариантов осуществления и не подлежат истолкованию в смысле ограничения изобретения.
Фигура 1А - трансаксиальный вид известной геометрической схемы сбора СТ-данных с захватом всего пучка.
Фигура 1В - трансаксиальный вид известной геометрической схемы сбора СТ-данных с захватом половины пучка.
Фигура 2 - трансаксиальный вид смещенной геометрической схемы сбора СТ-данных.
Фигура 3 - трансаксиальный вид геометрической схемы сбора СТ-данных с изображением источника и детектора, смещенных относительно области визуализации.
Фигура 4 - трансаксиальный вид геометрической схемы сбора СТ-данных с изображением источника и детектора, смещенных относительно области визуализации.
Фигура 5 - трансаксиальный вид геометрической схемы сбора СТ-данных с изображением источника и детектора, смещенных относительно области визуализации.
Фигура 6 - трансаксиальный вид геометрической схемы сбора СТ-данных.
Фигура 7 - трансаксиальный вид геометрической схемы сбора СТ-данных.
Фигура 8 - изображение системы визуализации.
Фигура 9 - изображение системы визуализации.
Усовершенствованная геометрическая схема сбора СТ-данных с двойным смещением, в которой как источник, так и детектор смещены от изоцентра визуализации, показаны на фигуре 2. Как показано, стол или другая подходящая опора 210 объекта поддерживает исследуемый объект 208 в области 206 исследования. Рентгеновский источник 202, например, рентгеновская трубка, и рентгеночувствительный детектор 204, например, детекторная решетка с плоской чувствительной поверхностью, продолжающийся в поперечном и осевом направлениях, поворачиваются относительно оси 214 вращения, которая выполняет также функцию центра поперечного FOV 218. Центральный(ая) луч или проекция 216 рентгеновского пучка 212 перпендикулярен к детектору в поперечном центре 219, но смещен относительно оси 214 вращения.
Антирассеивающая решетка 290 расположена между детектором 204 и областью 206 исследования для ослабления рассеянного излучения, принимаемого детектором 204. Решетка 290 содержит множество пластин, сфокусированных на источнике 202, так что решетка является симметричной в поперечном направлении относительно поперечного центра 219 детектора. Следует понимать, что упомянутая симметрия упрощает конструкцию системы. Возможна также реализация двумерной (2-мерной) антирассеивающей решетки, например решетки с пластинами, продолжающимися как в поперечном, так и в продольном направлениях.
Как показано, минимальное расстояние смещения между центральным лучом 216 и изоцентром 214 равно d. Поперечное смещение детектора 204 подбирают так, чтобы минимизировать максимально допустимый угол, под которым детектор 204 принимает излучение. Когда детектор 204 представляет собой плоский детектор, углы 240, 242 падения, под которыми крайние лучи 250, 252 рентгеновского пучка 212 пересекают детектор 204, равны. Как показано, в данной схеме также обеспечена переходная область 224.
Поперечное FOV 218 больше, чем в сравнимой геометрической схеме с захватом половины пучка, которая показана пунктирной линией на фигуре 2 для пояснения. При заданных поперечном размере 220 детектора и радиальном расстоянии между источником 202 и осью 214 вращения размер поперечного FOV 218 можно изменять путем изменения расстояния d между центральным лучом 216 и осью 214 вращения. Случай, в котором центральный луч 216 пересекает ось 214 вращения (т.е. когда d=0), соответствует геометрической схеме с захватом всего пучка, показанной на фигуре 1А. В конфигурации с максимальным FOV, для полного взятия угловых отсчетов необходим поворот приблизительно на 360°, тогда как в геометрической схеме с захватом всего пучка поворот на 180° плюс на угол веерного или конического пучка обеспечивает полное взятие угловых отсчетов. Необходимый угловой интервал для промежуточных конфигураций изменяется от 180° плюс угол веерного пучка до 360° и может быть легко вычислен.
Описанную геометрическую схему сбора данных можно легко реализовать различными способами. Как показано на фигуре 3, как источник 202, так и детектор 204 сдвинуты в направлении 244 параллельно плоскости детектора 204, при сохранении центра визуализации и оси 214 вращения без изменения относительно сравнимой геометрической схемы сбора данных с захватом всего или половины пучка. Для простоты иллюстрации, на фигуре 3 не показаны исследуемый объект 208, опора 210 объекта и защитная решетка 290 от рассеяния.
Как показано, направление смещения 244 является тангенциальным относительно поперечного FOV. На фигуре 3 показаны источник 202 и детектор 204, сдвинутые в примерные первое 302, второе 304 и третье 306 положения. Первое положение 302 соответствует геометрической схеме с захватом всего пучка, показанной на фигуре 1А. Данная схема обеспечивает минимальное поперечное FOV 308, и полное множество данных собирается в угловом диапазоне 180° плюс угол веерного или конического пучка. Третье положение 306 обеспечивает максимальное поперечное FOV 310; полное множество данных собирается в угловом диапазоне приблизительно 360°. Второе положение 304 отражает произвольное промежуточное положение, которое обеспечивает промежуточное поперечное FOV 312; аналогично, данные собираются в промежуточном угловом диапазоне. Хотя источник 202 и детектор 204 показаны в нескольких положениях для пояснения относительного смещения источника 202 и детектора, следует понимать, что источник 202 и детектор 204 предпочтительно удерживаются в заданном положении во время взятия отсчетов в необходимом угловом диапазоне.
Другой метод обеспечения геометрической схемы сбора данных со смещением показан на фигуре 4. Как показано, как источник 202, так и детектор 204 сдвинуты в направлении 402, для которого минимальное расстояние D между детектором 204 и краем поперечного FOV остается постоянным. И вновь, источник 202 и детектор 204 показаны в первом 402, втором 404, и третьем положениях 406, которые обеспечивают последовательно увеличенные поперечные FOV. Следует также отметить, как показано, что радиальное смещение R источника 202 от оси 214 вращения сравнительно больше смещения, показанного на фигуре 2. Такая схема расположения дополнительно увеличивает поперечное FOV.
Еще один метод обеспечения смещенной геометрической схемы сбора данных показан на фигуре 5. Как показано, источник 202 и детектор 204 сдвигают в тангенциальном направлении 550 относительно поперечного FOV, тогда как центр визуализации смещают в направлении 552, которое перпендикулярно поперечному FOV или главной плоскости детектора 204. И вновь, источник 202 и детектор 204 показаны в первом 502, втором 504 и третьем 506 положениях. Показаны также соответствующие первая 2141, вторая 2142 и третья 2143 оси вращения. Следует понимать, что показанная схема расположения обеспечивает геометрическую схему сбора данных, идентичную геометрической схеме на фигуре 4.
Еще один метод обеспечения смещенной геометрической схемы сбора данных показан на фигуре 6. Как показано, детектор 204 повернут относительно оси 602 поворота на угол 604, так что луч 214 рентгеновского пучка 212, который пересекает поперечный центр 219 детектора 204, перпендикулярен плоскости детектора 204. Размер поперечного FOV можно настраивать изменением угла 604, по желанию. Случай, в котором угол 604 равен нулю (0), соответствует геометрической схеме с захватом половины пучка, показанной на фигуре 1В, которая показана пунктирной линией на фигуре 6 для пояснения.
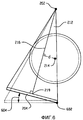
Хотя вышеприведенное описание относится к плоским детекторам, возможно применение дугообразных детекторов. Геометрическая схема сбора данных для системы, содержащей детектор 704, который опирается на участок круговой дуги, расположенной по центру относительно поперечного положения рентгеновского источника 202, показана на фигуре 7. Центральный луч или проекция 216 рентгеновского пучка 212 проходит перпендикулярно к касательной к дуге детектора 704 в центре детектора 719, но со смещением относительно оси 206 вращения на расстояние d. Как показано, переходная область 224 также обеспечена. Как должно быть очевидно специалистам в данной области техники, вышеприведенное описание со ссылками на фигурах 2-6 применимо к детектору дугообразной конфигурации.
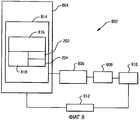
На фигуре 8 показана система 802 визуализации, пригодная для применения с геометрической схемой сбора данных с двойным смещением. Система 802 содержит систему 804 сбора данных, блок 806 реконструкции, процессор 808 изображений, пользовательский интерфейс 810 и контроллер 812.
Система 804 сбора данных содержит систему 814 сбора СТ-данных, в которой источник 202 и детектор 204 установлены на поворотном гентри 816 для поворота вокруг области исследования. Посредством, например, продольного перемещения опоры 210 объекта согласованно с поворотом поворотного гентри 816 можно реализовать аксиальную, спиральную, круговую и линейную, седловидную или другую искомую траектории сканирования в кольцевом, 360° или другом угловом диапазоне взятия отсчетов.
В одной реализации источник 202 и детектор 206 установлены неподвижно относительно поворотного гентри 816, и поэтому геометрическая схема сбора данных является фиксированной. В другой реализации, источник 202 и детектор установлены с возможностью перемещения на поворотном гентри 816, и поэтому геометрическая схема сбора данных является регулируемой, например, с обеспечением возможности относительного перемещения, показанного выше на фигурах 3-7. В подобной реализации, по меньшей мере, один привод 818 может обеспечивать необходимое движущее усилие.
В качестве альтернативы, источник 202 и детектор 204 могут перемещаться вручную пользователем. В каждом случае, источник 202 и детектор 204 предпочтительно установлены на общей раме или таким иным способом, что физическая взаимосвязь между источником 202 и детектором 204 не изменяется при переходе от одной конфигурации FOV к другой, так как подобное исполнение снижает потребность в отдельных холостых или калибровочных сканированиях.
Блок 806 реконструкции реконструирует данные, сформированные системой 804 сбора данных, с использованием известных методов реконструкции для формирования объемных данных, характеризующих исследуемый объект. Подходящие методы реконструкции содержат аналитические методы, например, восстановление методом фильтрованных обратных проекций, а также итеративные методы. Один метод, который хорошо подходит для реконструкции данных с коническим пучком, представляет собой известный алгоритм Фельдкампа. Когда геометрическая схема сбора данных обеспечивает переходную зону 224, для ослабления эффектов избыточности данных в переходной зоне 224м можно применить функцию сглаживания.
Процессор 808 изображений обрабатывает объемные данные, как требуется, например, для отображения искомым образом на пользовательском интерфейсе 810, который может содержать, по меньшей мере, одно устройство вывода, например, монитор и принтер, и, по меньшей мере, одно устройство ввода, например, клавиатуру и мышь.
Пользовательский интерфейс 810, который предпочтительно реализован с использованием программных команд, исполняемых универсальным или другим компьютером, для обеспечения графического пользовательского интерфейса (GUI), позволяет пользователю управлять или иначе взаимодействовать с системой 802 визуализации, например, посредством выбора требуемой конфигурации или размеров FOV, запуска и/или прекращения сканирований, выбора искомого протокола сканирования или реконструкции, манипулирования объемными данными и т.п. В одной реализации, конфигурация FOV и протокол реконструкции или то и другое устанавливаются автоматически системой 802 визуализации на основе протокола сканирования, выбранного пользователем. В еще одном примере, пользовательский интерфейс 810 может предлагать или иначе позволять пользователю вводить требуемый поперечный радиус, диаметр или другой размер FOV. В подобной реализации информация от пользователя применяется для автоматического вычисления требуемого(ых) положения(ий) источника 102 и/или детектора 104.
Контроллер 812, функционально соединенный с пользовательским интерфейсом 810, управляет работой системы 704 сбора данных, например, чтобы выполнять требуемый протокол сканирования, приводить в действие привод(ы) 818 для позиционирования источника 102 и/или детектора 104 и, тем самым, для обеспечения искомого FOV и т.п.
Ниже приведено описание порядка работы системы 802 визуализации со ссылкой на фигуру 9. В случае системы 802 сбора данных, которая обеспечивает настраиваемую конфигурацию FOV, положения источника 202 и детектора 204 настраивают для получения требуемой конфигурации FOV на этапе 902. В одном примере, настройка геометрической схемы для обеспечения максимального поперечного FOV может быть необходима для сканирования груди крупного пациента, тогда как настройка геометрической схемы до конфигурации с захватом всего пучка может быть достаточна для выполнения сканирования мозга.
Данные сканирования собирают на этапе 904 для сбора данных проекций в каждом из множества угловых положений относительно области 206 исследования. Необходимый угловой диапазон взятия отсчетов поперечной FOV 206 также зависит от выбранной конфигурации FOV. Следует отметить, что положение источника 202 и детектора может оставаться без изменений во время взятия необходимых угловых отсчетов.
Данные сканирования реконструируют на этапе 906 и отображают в требуемом формате на этапе 908.
На этапе 910, процесс повторяют по требованию, например, для последующего сканирования пациентов. Следует отметить, что до реконструкции и/или отображения данных, собранных в процессе заданного сканирования, можно получить дополнительное(ые) сканирование(я).
Хотя вышеизложенное описание касается рентгеновской СТ-системы, в которой источник 202 является фокусом рентгеновской трубки и, следовательно, по существу, точечным источником, предполагается возможность альтернативных вариантов. Например, источник 202 может быть реализован в виде линейного источника. Возможны также геометрические схемы с клиновидным и другими пучками. Возможно также использование источников гамма- и другого излучения. Вместо поворота источника 202 и детектора 204 вокруг области 206 исследования, источник 202 и детектор 204 могут оставаться в постоянном положении по углу, тогда объект 208 перемещается и/или поворачивается для обеспечения необходимого взятия угловых отсчетов. Возможен также вариант с обеспечением нескольких источников 202 и детекторов 204, при этом соответствующие наборы источников и детекторов могут быть смещены по углу и/или продольно один относительно другого. Следует отметить, что в системах, содержащих несколько смещенных по углу источников и детекторов, поворот, необходимый для обеспечения диапазона полного взятия угловых отсчетов, обычно уменьшен по сравнению с системами, содержащими единственную пару источник/детектора, и соответственно можно настраивать траекторию.
Изобретение описано со ссылкой на предпочтительные варианты осуществления. После прочтения и изучения вышеприведенного подробного описания другими специалистами могут быть созданы модификации и изменения. Предполагается, что изобретение следует трактовать как охватывающее все подобные модификации и изменения в то степени, в которой они не выходят за пределы объема притязаний прилагаемой формулы изобретения или ее эквивалентом.
Claims (39)
1. Устройство для сбора данных томографических проекций во множестве угловых положений относительно объекта (208), расположенного в области (206) исследования, при этом устройство содержит:
источник (202) излучения;
детектор (204, 704), чувствительный к излучению, который регистрирует испускаемое источником излучение (212) после того, как излучение пересекло область исследования;
при этом как источник, так и поперечный центр (219, 719) детектора поперечно смещены от центра (214) поперечного поля (218) обзора во время сбора данных проекций, причем направление поперечного смещения является тангенциальным относительно поперечного поля обзора.
источник (202) излучения;
детектор (204, 704), чувствительный к излучению, который регистрирует испускаемое источником излучение (212) после того, как излучение пересекло область исследования;
при этом как источник, так и поперечный центр (219, 719) детектора поперечно смещены от центра (214) поперечного поля (218) обзора во время сбора данных проекций, причем направление поперечного смещения является тангенциальным относительно поперечного поля обзора.
2. Устройство по п.1, содержащее блок (806) реконструкции, который реконструирует данные проекций для формирования объемных данных, характеризующих объект.
3. Устройство по п.1, в котором источник и детектор поворачиваются вокруг оси вращения и при этом ось вращения является центром поперечного поля обзора.
4. Устройство по п.1, в котором данные проекций являются данными рентгеновской компьютерной томографии.
5. Устройство по п.1, в котором источник испускает пучок (212) излучения, имеющий, в общем, веерообразное поперечное сечение, при этом поперечное сечение содержит луч (216), который перпендикулярен детектору, и причем луч поперечно смещен от центра поперечного поля обзора.
6. Устройство по п.5, в котором детектор содержит поперечный центр (219, 719) и луч пересекает поперечный центр.
7. Устройство по п.5, в котором луч является центральным лучом пучка излучения.
8. Устройство по п.5, в котором детектор является плоским детектором.
9. Устройство по п.1, в котором источник испускает пучок (212) излучения, имеющий, в общем, веерообразное поперечное сечение, при этом поперечное сечение содержит первый (250) и второй (252) крайние лучи и крайние лучи пересекают детектор под равными углами (240, 242) падения.
10. Устройство по п.1, в котором детектор содержит переходную зону (224), в которой детекторы формируют избыточные данные проекций.
11. Устройство по п.1, содержащее средство для изменения положения источника и детектора относительно центра поперечного поля обзора, чтобы обеспечивать геометрическую схему с захватом всего пучка.
12. Устройство по п.1, содержащее средство для сдвига источника и детектора в поперечном направлении (244), которое параллельно главной плоскости детектора.
13. Устройство по п.12, содержащее средство для смещения оси вращения в направлении (552), которое перпендикулярно поперечному полю обзора.
14. Устройство по п.1, содержащее средство для сдвига источника и детектора в поперечном направлении (402), для которого минимальное расстояние между детектором и краем поперечного поля обзора остается постоянным.
15. Устройство по п.1, содержащее средство для поворота источника и детектора вокруг оси поворота так, чтобы изменять размер поперечного поля обзора.
16. Устройство по п.1, содержащее пользовательский интерфейс (810), который принимает ввод пользователя, указывающий требуемый размер поперечного поля обзора, и при этом устройство использует требуемый размер для определения требуемого положения детектора.
17. Устройство по п.1, при этом устройство собирает данные томографических проекций по спиральной траектории сканирования.
18. Устройство по п.1, в котором устройство собирает данные томографических проекций по приблизительно 360° осевой траектории сканирования.
19. Способ компьютерной томографии, содержащий этапы, на которых:
испускают первое излучение (212) из позиции, которая поперечно смещена от центра (214) поперечного поля (218) обзора, при этом первое излучение пересекает участок поперечного поля обзора;
используют детектор (204, 704) излучения для сбора данных компьютерно-томографических проекций, характеризующих первое излучение, при этом детектор поперечно смещен от центра поперечного поля обзора, причем направление поперечного смещения является тангенциальным относительно поперечного поля обзора;
повторяют этапы испускания первого излучения и использования детектора излучения для сбора данных компьютерно-томографических проекций, характеризующих первое излучение, под каждым из множества углов проекций для сбора первого множества СТ-данных;
реконструируют первое множество СТ-данных для формирования первых объемных данных.
испускают первое излучение (212) из позиции, которая поперечно смещена от центра (214) поперечного поля (218) обзора, при этом первое излучение пересекает участок поперечного поля обзора;
используют детектор (204, 704) излучения для сбора данных компьютерно-томографических проекций, характеризующих первое излучение, при этом детектор поперечно смещен от центра поперечного поля обзора, причем направление поперечного смещения является тангенциальным относительно поперечного поля обзора;
повторяют этапы испускания первого излучения и использования детектора излучения для сбора данных компьютерно-томографических проекций, характеризующих первое излучение, под каждым из множества углов проекций для сбора первого множества СТ-данных;
реконструируют первое множество СТ-данных для формирования первых объемных данных.
20. Способ по п.19, дополнительно содержащий этапы, на которых:
после этапа использования детектора излучения для сбора данных компьютерно-томографических проекций, характеризующих первое излучение, изменяют поперечное смещение позиции и поперечное смещение детектора для изменения размера поперечного поля обзора;
испускают второе излучение, при этом второе излучение пересекает, по меньшей мере, участок поперечного поля обзора;
используют детектор излучения для сбора данных компьютерно-томографических проекций, характеризующих второе излучение;
повторяют этапы испускания второго излучения и использования детектора излучения для сбора данных компьютерно-томографических проекций, характеризующих второе излучение, под каждым из множества углов проекций для сбора второго множества СТ-данных;
реконструируют второе множество данных проекций для формирования вторых объемных данных.
после этапа использования детектора излучения для сбора данных компьютерно-томографических проекций, характеризующих первое излучение, изменяют поперечное смещение позиции и поперечное смещение детектора для изменения размера поперечного поля обзора;
испускают второе излучение, при этом второе излучение пересекает, по меньшей мере, участок поперечного поля обзора;
используют детектор излучения для сбора данных компьютерно-томографических проекций, характеризующих второе излучение;
повторяют этапы испускания второго излучения и использования детектора излучения для сбора данных компьютерно-томографических проекций, характеризующих второе излучение, под каждым из множества углов проекций для сбора второго множества СТ-данных;
реконструируют второе множество данных проекций для формирования вторых объемных данных.
21. Способ по п.20, в котором вторые данные проекций пересекают все поперечное поле обзора.
22. Способ по п.20, в котором этап изменения поперечного смещения содержит этап, заключающийся в том, что сдвигают источник и детектор в поперечном направлении (550), которое является тангенциальным относительно поперечного поля обзора.
23. Способ по п.22, в котором этап изменения поперечного смещения содержит этап, заключающийся в том, что сдвигают ось вращения в направлении (552), которое перпендикулярно поперечному полю обзора.
24. Способ по п.20, в котором этап изменения поперечного смещения содержит этап, заключающийся в том, что сдвигают источник и детектор в направлении (402), для которого минимальное расстояние между детектором и краем поперечного поля обзора остается постоянным.
25. Способ по п.19, содержащий этапы, на которых:
принимают ввод пользователя, который указывает требуемый размер поперечного поля обзора;
используют требуемый размер для определения требуемого положения детектора.
принимают ввод пользователя, который указывает требуемый размер поперечного поля обзора;
используют требуемый размер для определения требуемого положения детектора.
26. Способ по п.19, в котором детектор излучения является плоским детектором, этап испускания первого излучения содержит этап, заключающийся в том, что испускают пучок (212) излучения, имеющий, в общем, веерообразное поперечное сечение, при этом поперечное сечение содержит первый (250) и второй (252) крайние лучи и причем крайние лучи пересекают детектор под равными углами (240, 242) падения.
27. Способ по п.19, в котором этап испускания первого излучения содержит этап, заключающийся в том, что испускают пучок излучения, имеющий, в общем, веерообразное поперечное сечение, при этом поперечное сечение содержит центральный луч (216), причем, центральный луч поперечно смещен от центра поперечного поля обзора и центральный луч пересекает детектор под углом, который перпендикулярен детектору.
28. Способ по п.27, в котором центральный луч пересекает поперечный центр детектора.
29. Способ по п.19, содержащий этап, заключающийся в том, что поворачивают позицию и детектор излучения вокруг оси вращения, при этом ось вращения является центром поперечного поля обзора.
30. Способ по п.19, содержащий этап, заключающийся в том, что используют двумерную антирассеивающую решетку для ослабления рассеянного излучения, принимаемого детектором.
31. Способ по п.19, содержащий этап, заключающийся в том, что собирают данные томографических проекций по спиральной или осевой траектории сканирования.
32. Компьютерное томографическое устройство, содержащее:
рентгеновский источник (202), при этом рентгеновский источник поперечно смещен от оси (214) вращения и поворачивается относительно нее;
рентгеновский детектор (204, 704), при этом рентгеновский детектор регистрирует излучение, испускаемое рентгеновским источником, причем рентгеновский детектор поперечно смещен от оси вращения и поворачивается относительно оси вращения в состоянии постоянной механической связи с рентгеновским источником для сбора данных проекций под множеством углов проекций, причем рентгеновский источник испускает излучение (212), характеризующееся поперечным углом веерного пучка, и причем полное взятие угловых отсчетов поперечного поля (218) обзора требует сбора данных проекций в большем угловом диапазоне, чем 180° плюс угол веерного пучка, направление поперечного смещения является тангенциальным относительно поперечного поля обзора;
блок (806) реконструкции, который реконструирует данные проекций для формирования объемных данных, характеризующих поперечное поле обзора.
рентгеновский источник (202), при этом рентгеновский источник поперечно смещен от оси (214) вращения и поворачивается относительно нее;
рентгеновский детектор (204, 704), при этом рентгеновский детектор регистрирует излучение, испускаемое рентгеновским источником, причем рентгеновский детектор поперечно смещен от оси вращения и поворачивается относительно оси вращения в состоянии постоянной механической связи с рентгеновским источником для сбора данных проекций под множеством углов проекций, причем рентгеновский источник испускает излучение (212), характеризующееся поперечным углом веерного пучка, и причем полное взятие угловых отсчетов поперечного поля (218) обзора требует сбора данных проекций в большем угловом диапазоне, чем 180° плюс угол веерного пучка, направление поперечного смещения является тангенциальным относительно поперечного поля обзора;
блок (806) реконструкции, который реконструирует данные проекций для формирования объемных данных, характеризующих поперечное поле обзора.
33. Устройство по п.32, в котором устройство содержит поворотный гентри (816) и при этом рентгеновский источник и рентгеновский детектор установлены с возможностью перемещения относительно поворотного гентри.
34. Устройство по п.32, в котором полное взятие угловых отсчетов поперечного поля обзора требует сбора данных проекций в угловом диапазоне приблизительно 360°.
35. Устройство по п.32, в котором центральный луч (216) излучения, испускаемого рентгеновским источником, смещен от оси вращения и пересекает поперечный центр (219, 719) рентгеновского детектора.
36. Устройство по п.35, в котором детектор излучения является плоским и при этом центральный луч перпендикулярен плоскости детектора излучения.
37. Устройство по п.32, содержащее антирассеивающую решетку (290), расположенную между детектором и областью исследования, и при этом антирассеивающая решетка симметрична относительно поперечного центра детектора.
38. Устройство по п.32, содержащее средство для изменения поперечного смещения рентгеновского детектора для изменения размера поперечного поля обзора.
39. Устройство по п.32, содержащее средство для сбора данных по одной из кольцевой, круговой и линейной, спиральной или седловидной траекторий.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US82267806P | 2006-08-17 | 2006-08-17 | |
| US60/822,678 | 2006-08-17 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2009109428A RU2009109428A (ru) | 2010-09-27 |
| RU2452385C2 true RU2452385C2 (ru) | 2012-06-10 |
Family
ID=38980926
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2009109428/14A RU2452385C2 (ru) | 2006-08-17 | 2007-07-24 | Получение компьютерно-томографических изображений |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7945012B2 (ru) |
| EP (1) | EP2053972B1 (ru) |
| JP (1) | JP5337031B2 (ru) |
| CN (1) | CN101505658B (ru) |
| RU (1) | RU2452385C2 (ru) |
| WO (1) | WO2008021671A2 (ru) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2574422C1 (ru) * | 2013-07-26 | 2016-02-10 | Тсинхуа Юниверсити | Способы реконструкции рентгеновской двухэнергетической компьютерной томографии |
| RU2579815C2 (ru) * | 2011-02-01 | 2016-04-10 | Конинклейке Филипс Н.В. | Способ и система для восстановления изображения компьютерной томографии двойной энергии |
| RU2674650C2 (ru) * | 2014-08-05 | 2018-12-12 | Конинклейке Филипс Н.В. | Устройство-решетка для устройства рентгеновской визуализации |
| RU2703344C1 (ru) * | 2015-10-13 | 2019-10-16 | Электа, Инк. | Формирование псевдо-кт по мр-данным с использованием регрессионной модели на основе признаков |
Families Citing this family (148)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10653497B2 (en) | 2006-02-16 | 2020-05-19 | Globus Medical, Inc. | Surgical tool systems and methods |
| US10357184B2 (en) | 2012-06-21 | 2019-07-23 | Globus Medical, Inc. | Surgical tool systems and method |
| US10893912B2 (en) | 2006-02-16 | 2021-01-19 | Globus Medical Inc. | Surgical tool systems and methods |
| EP2217147B1 (en) | 2007-11-06 | 2012-06-27 | Koninklijke Philips Electronics N.V. | Nuclear medicine spect-ct machine with integrated asymmetric flat panel cone-beam ct and spect system |
| FI123452B (fi) * | 2008-10-03 | 2013-05-15 | Palodex Group Oy | Menetelmä ja sen toteuttava laite röntgenkuvauksen suorittamiseksi |
| EP2331945B1 (en) * | 2008-10-10 | 2018-05-30 | Koninklijke Philips N.V. | Method and apparatus to improve ct image acquisition using a displaced geometry |
| WO2010070527A2 (en) | 2008-12-15 | 2010-06-24 | Koninklijke Philips Electronics N. V. | Semicircular inversed offset scanning for enlarged field of view 3d |
| WO2010079393A1 (en) | 2009-01-12 | 2010-07-15 | Koninklijke Philips Electronics N.V. | Method and apparatus to filter x-ray beams generated using a ct apparatus with displaced geometry |
| EP2446822B1 (en) * | 2009-06-25 | 2019-05-08 | The Yoshida Dental Mfg. Co., Ltd. | X-ray photographing device |
| RU2550542C2 (ru) | 2009-08-06 | 2015-05-10 | Конинклейке Филипс Электроникс Н.В. | Способ и устройство для формирования компьютерных томографических изображений с использованием геометрий со смещенным детектором |
| US8430565B2 (en) | 2010-06-02 | 2013-04-30 | Palodex Group Oy | X-ray device having head stabilizing member |
| DE102010026674B4 (de) * | 2010-07-09 | 2012-09-27 | Siemens Aktiengesellschaft | Bildgebungsvorrichtung und Strahlentherapiegerät |
| CN102062740B (zh) * | 2010-12-01 | 2013-02-13 | 中国科学院深圳先进技术研究院 | 锥束ct扫描成像方法及系统 |
| JP5697430B2 (ja) | 2010-12-17 | 2015-04-08 | キヤノン株式会社 | X線撮像装置 |
| WO2012101548A2 (en) | 2011-01-27 | 2012-08-02 | Koninklijke Philips Electronics N.V. | Truncation compensation for iterative cone-beam ct reconstruction for spect/ct systems |
| CN102648850B (zh) * | 2011-02-28 | 2014-01-22 | 上海西门子医疗器械有限公司 | 一种x射线投影数据采集系统 |
| WO2012131660A1 (en) | 2011-04-01 | 2012-10-04 | Ecole Polytechnique Federale De Lausanne (Epfl) | Robotic system for spinal and other surgeries |
| DE102011076547A1 (de) * | 2011-05-26 | 2012-11-29 | Siemens Aktiengesellschaft | Verfahren zum Gewinnen eines 3D-Bilddatensatzes zu einem Bildobjekt |
| US11857149B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | Surgical robotic systems with target trajectory deviation monitoring and related methods |
| US11864745B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical, Inc. | Surgical robotic system with retractor |
| US11253327B2 (en) | 2012-06-21 | 2022-02-22 | Globus Medical, Inc. | Systems and methods for automatically changing an end-effector on a surgical robot |
| US11974822B2 (en) | 2012-06-21 | 2024-05-07 | Globus Medical Inc. | Method for a surveillance marker in robotic-assisted surgery |
| US10624710B2 (en) | 2012-06-21 | 2020-04-21 | Globus Medical, Inc. | System and method for measuring depth of instrumentation |
| US11864839B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical Inc. | Methods of adjusting a virtual implant and related surgical navigation systems |
| US10799298B2 (en) | 2012-06-21 | 2020-10-13 | Globus Medical Inc. | Robotic fluoroscopic navigation |
| US11857266B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | System for a surveillance marker in robotic-assisted surgery |
| US10231791B2 (en) | 2012-06-21 | 2019-03-19 | Globus Medical, Inc. | Infrared signal based position recognition system for use with a robot-assisted surgery |
| US11116576B2 (en) | 2012-06-21 | 2021-09-14 | Globus Medical Inc. | Dynamic reference arrays and methods of use |
| JP2015528713A (ja) | 2012-06-21 | 2015-10-01 | グローバス メディカル インコーポレイティッド | 手術ロボットプラットフォーム |
| US12004905B2 (en) | 2012-06-21 | 2024-06-11 | Globus Medical, Inc. | Medical imaging systems using robotic actuators and related methods |
| US11786324B2 (en) | 2012-06-21 | 2023-10-17 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US10350013B2 (en) | 2012-06-21 | 2019-07-16 | Globus Medical, Inc. | Surgical tool systems and methods |
| US10758315B2 (en) | 2012-06-21 | 2020-09-01 | Globus Medical Inc. | Method and system for improving 2D-3D registration convergence |
| US11607149B2 (en) | 2012-06-21 | 2023-03-21 | Globus Medical Inc. | Surgical tool systems and method |
| US10874466B2 (en) | 2012-06-21 | 2020-12-29 | Globus Medical, Inc. | System and method for surgical tool insertion using multiaxis force and moment feedback |
| US11589771B2 (en) | 2012-06-21 | 2023-02-28 | Globus Medical Inc. | Method for recording probe movement and determining an extent of matter removed |
| US10136954B2 (en) | 2012-06-21 | 2018-11-27 | Globus Medical, Inc. | Surgical tool systems and method |
| US11793570B2 (en) | 2012-06-21 | 2023-10-24 | Globus Medical Inc. | Surgical robotic automation with tracking markers |
| US11395706B2 (en) | 2012-06-21 | 2022-07-26 | Globus Medical Inc. | Surgical robot platform |
| US10842461B2 (en) | 2012-06-21 | 2020-11-24 | Globus Medical, Inc. | Systems and methods of checking registrations for surgical systems |
| US11896446B2 (en) | 2012-06-21 | 2024-02-13 | Globus Medical, Inc | Surgical robotic automation with tracking markers |
| US11399900B2 (en) | 2012-06-21 | 2022-08-02 | Globus Medical, Inc. | Robotic systems providing co-registration using natural fiducials and related methods |
| US11317971B2 (en) | 2012-06-21 | 2022-05-03 | Globus Medical, Inc. | Systems and methods related to robotic guidance in surgery |
| US11298196B2 (en) | 2012-06-21 | 2022-04-12 | Globus Medical Inc. | Surgical robotic automation with tracking markers and controlled tool advancement |
| US11045267B2 (en) | 2012-06-21 | 2021-06-29 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US10646280B2 (en) | 2012-06-21 | 2020-05-12 | Globus Medical, Inc. | System and method for surgical tool insertion using multiaxis force and moment feedback |
| US11963755B2 (en) | 2012-06-21 | 2024-04-23 | Globus Medical Inc. | Apparatus for recording probe movement |
| JP6370297B2 (ja) * | 2012-09-07 | 2018-08-08 | トロフィー | 部分的ct撮影のための装置 |
| EP2914179A1 (en) * | 2012-11-02 | 2015-09-09 | Analogic Corporation | Volumetric and projection image generation |
| US9629602B2 (en) * | 2013-01-04 | 2017-04-25 | The General Hospital Corporation | System and method for ultra-high resolution tomographic imaging |
| DE102013203541A1 (de) | 2013-03-01 | 2014-09-04 | Siemens Aktiengesellschaft | Röntgen-CT-Abtastung und Dual-Source-CT-System |
| US10251613B2 (en) | 2013-03-01 | 2019-04-09 | Siemens Healthcare Gmbh | X-ray CT scanning and dual-source CT system |
| US9283048B2 (en) | 2013-10-04 | 2016-03-15 | KB Medical SA | Apparatus and systems for precise guidance of surgical tools |
| WO2015073048A1 (en) * | 2013-11-18 | 2015-05-21 | Varian Medical Systems, Inc. | Cone-beam computed tomography imaging devices, systems, and methods |
| US9241771B2 (en) | 2014-01-15 | 2016-01-26 | KB Medical SA | Notched apparatus for guidance of an insertable instrument along an axis during spinal surgery |
| EP3104803B1 (en) | 2014-02-11 | 2021-09-15 | KB Medical SA | Sterile handle for controlling a robotic surgical system from a sterile field |
| EP3134022B1 (en) | 2014-04-24 | 2018-01-10 | KB Medical SA | Surgical instrument holder for use with a robotic surgical system |
| CN106999248B (zh) | 2014-06-19 | 2021-04-06 | Kb医疗公司 | 用于执行微创外科手术的系统及方法 |
| US10765438B2 (en) | 2014-07-14 | 2020-09-08 | KB Medical SA | Anti-skid surgical instrument for use in preparing holes in bone tissue |
| CN107072673A (zh) | 2014-07-14 | 2017-08-18 | Kb医疗公司 | 用于在骨组织中制备孔的防滑手术器械 |
| CN104399188B (zh) * | 2014-11-18 | 2018-06-19 | 上海联影医疗科技有限公司 | 直线加速器辐射头装置 |
| EP3226781B1 (en) | 2014-12-02 | 2018-08-01 | KB Medical SA | Robot assisted volume removal during surgery |
| CN104545976B (zh) * | 2014-12-30 | 2017-04-19 | 上海优益基医疗器械有限公司 | 计算机体层摄影方法和装置 |
| US10010296B2 (en) | 2014-12-30 | 2018-07-03 | Morpho Detection, Llc | Systems and methods for x-ray CT scanner with reconfigurable field of view |
| US10013808B2 (en) | 2015-02-03 | 2018-07-03 | Globus Medical, Inc. | Surgeon head-mounted display apparatuses |
| US10555782B2 (en) | 2015-02-18 | 2020-02-11 | Globus Medical, Inc. | Systems and methods for performing minimally invasive spinal surgery with a robotic surgical system using a percutaneous technique |
| CN105157659B (zh) * | 2015-05-15 | 2018-01-12 | 天津普达软件技术有限公司 | 基于电子标尺的滤线栅检测方法 |
| US10058394B2 (en) | 2015-07-31 | 2018-08-28 | Globus Medical, Inc. | Robot arm and methods of use |
| US10646298B2 (en) | 2015-07-31 | 2020-05-12 | Globus Medical, Inc. | Robot arm and methods of use |
| US10080615B2 (en) | 2015-08-12 | 2018-09-25 | Globus Medical, Inc. | Devices and methods for temporary mounting of parts to bone |
| JP6894431B2 (ja) | 2015-08-31 | 2021-06-30 | ケービー メディカル エスアー | ロボット外科用システム及び方法 |
| US10034716B2 (en) | 2015-09-14 | 2018-07-31 | Globus Medical, Inc. | Surgical robotic systems and methods thereof |
| DE102015219520A1 (de) * | 2015-10-08 | 2017-04-13 | Friedrich-Alexander-Universität Erlangen-Nürnberg | Tomographieanlage und Verfahren für großvolumige 3D-Aufnahmen |
| US9771092B2 (en) | 2015-10-13 | 2017-09-26 | Globus Medical, Inc. | Stabilizer wheel assembly and methods of use |
| US11883217B2 (en) | 2016-02-03 | 2024-01-30 | Globus Medical, Inc. | Portable medical imaging system and method |
| US10842453B2 (en) | 2016-02-03 | 2020-11-24 | Globus Medical, Inc. | Portable medical imaging system |
| US11058378B2 (en) | 2016-02-03 | 2021-07-13 | Globus Medical, Inc. | Portable medical imaging system |
| US10448910B2 (en) | 2016-02-03 | 2019-10-22 | Globus Medical, Inc. | Portable medical imaging system |
| US10117632B2 (en) | 2016-02-03 | 2018-11-06 | Globus Medical, Inc. | Portable medical imaging system with beam scanning collimator |
| US10866119B2 (en) | 2016-03-14 | 2020-12-15 | Globus Medical, Inc. | Metal detector for detecting insertion of a surgical device into a hollow tube |
| EP3241518B1 (en) | 2016-04-11 | 2024-10-23 | Globus Medical, Inc | Surgical tool systems |
| CN107536618B (zh) * | 2016-06-29 | 2020-05-15 | 合肥美亚光电技术股份有限公司 | X射线成像装置及其探测器偏转机构 |
| CN106714905B (zh) | 2016-08-01 | 2019-12-27 | 深圳市奥沃医学新技术发展有限公司 | 一种放射治疗设备以及射束成像方法 |
| US11039893B2 (en) | 2016-10-21 | 2021-06-22 | Globus Medical, Inc. | Robotic surgical systems |
| EP3351202B1 (en) | 2017-01-18 | 2021-09-08 | KB Medical SA | Universal instrument guide for robotic surgical systems |
| JP7233841B2 (ja) | 2017-01-18 | 2023-03-07 | ケービー メディカル エスアー | ロボット外科手術システムのロボットナビゲーション |
| EP3395278A1 (en) | 2017-01-18 | 2018-10-31 | KB Medical SA | Universal instrument guide for robotic surgical systems |
| US11071594B2 (en) | 2017-03-16 | 2021-07-27 | KB Medical SA | Robotic navigation of robotic surgical systems |
| US20180289432A1 (en) | 2017-04-05 | 2018-10-11 | Kb Medical, Sa | Robotic surgical systems for preparing holes in bone tissue and methods of their use |
| US11135015B2 (en) | 2017-07-21 | 2021-10-05 | Globus Medical, Inc. | Robot surgical platform |
| US11794338B2 (en) | 2017-11-09 | 2023-10-24 | Globus Medical Inc. | Robotic rod benders and related mechanical and motor housings |
| EP3492032B1 (en) | 2017-11-09 | 2023-01-04 | Globus Medical, Inc. | Surgical robotic systems for bending surgical rods |
| US11382666B2 (en) | 2017-11-09 | 2022-07-12 | Globus Medical Inc. | Methods providing bend plans for surgical rods and related controllers and computer program products |
| US11134862B2 (en) | 2017-11-10 | 2021-10-05 | Globus Medical, Inc. | Methods of selecting surgical implants and related devices |
| CN107688009A (zh) * | 2017-11-10 | 2018-02-13 | 华北电力大学 | 基于自动扫描系统的tdlas锅炉炉内气体二维浓度分布检测方法及装置 |
| US20190254753A1 (en) | 2018-02-19 | 2019-08-22 | Globus Medical, Inc. | Augmented reality navigation systems for use with robotic surgical systems and methods of their use |
| US10573023B2 (en) | 2018-04-09 | 2020-02-25 | Globus Medical, Inc. | Predictive visualization of medical imaging scanner component movement |
| US11337742B2 (en) | 2018-11-05 | 2022-05-24 | Globus Medical Inc | Compliant orthopedic driver |
| US11278360B2 (en) | 2018-11-16 | 2022-03-22 | Globus Medical, Inc. | End-effectors for surgical robotic systems having sealed optical components |
| US11602402B2 (en) | 2018-12-04 | 2023-03-14 | Globus Medical, Inc. | Drill guide fixtures, cranial insertion fixtures, and related methods and robotic systems |
| US11744655B2 (en) | 2018-12-04 | 2023-09-05 | Globus Medical, Inc. | Drill guide fixtures, cranial insertion fixtures, and related methods and robotic systems |
| US11918313B2 (en) | 2019-03-15 | 2024-03-05 | Globus Medical Inc. | Active end effectors for surgical robots |
| US20200297357A1 (en) | 2019-03-22 | 2020-09-24 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11571265B2 (en) | 2019-03-22 | 2023-02-07 | Globus Medical Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11419616B2 (en) | 2019-03-22 | 2022-08-23 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11382549B2 (en) | 2019-03-22 | 2022-07-12 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, and related methods and devices |
| US11317978B2 (en) | 2019-03-22 | 2022-05-03 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11806084B2 (en) | 2019-03-22 | 2023-11-07 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, and related methods and devices |
| US11045179B2 (en) | 2019-05-20 | 2021-06-29 | Global Medical Inc | Robot-mounted retractor system |
| FI128796B (en) | 2019-06-03 | 2020-12-15 | Planmeca Oy | CT imaging device |
| BR112021024321A2 (pt) | 2019-06-03 | 2022-01-11 | Planmeca Oy | Aparelho de geração de imagens de raios-x odontológicas ou médicas |
| US11628023B2 (en) | 2019-07-10 | 2023-04-18 | Globus Medical, Inc. | Robotic navigational system for interbody implants |
| CN112472109B (zh) * | 2019-09-12 | 2024-08-13 | 通用电气精准医疗有限责任公司 | 校准方法及x射线成像系统 |
| US11571171B2 (en) | 2019-09-24 | 2023-02-07 | Globus Medical, Inc. | Compound curve cable chain |
| US11426178B2 (en) | 2019-09-27 | 2022-08-30 | Globus Medical Inc. | Systems and methods for navigating a pin guide driver |
| US11864857B2 (en) | 2019-09-27 | 2024-01-09 | Globus Medical, Inc. | Surgical robot with passive end effector |
| US11890066B2 (en) | 2019-09-30 | 2024-02-06 | Globus Medical, Inc | Surgical robot with passive end effector |
| US11510684B2 (en) | 2019-10-14 | 2022-11-29 | Globus Medical, Inc. | Rotary motion passive end effector for surgical robots in orthopedic surgeries |
| US12133772B2 (en) | 2019-12-10 | 2024-11-05 | Globus Medical, Inc. | Augmented reality headset for navigated robotic surgery |
| US11992373B2 (en) | 2019-12-10 | 2024-05-28 | Globus Medical, Inc | Augmented reality headset with varied opacity for navigated robotic surgery |
| US12064189B2 (en) | 2019-12-13 | 2024-08-20 | Globus Medical, Inc. | Navigated instrument for use in robotic guided surgery |
| US11464581B2 (en) | 2020-01-28 | 2022-10-11 | Globus Medical, Inc. | Pose measurement chaining for extended reality surgical navigation in visible and near infrared spectrums |
| US11382699B2 (en) | 2020-02-10 | 2022-07-12 | Globus Medical Inc. | Extended reality visualization of optical tool tracking volume for computer assisted navigation in surgery |
| US11207150B2 (en) | 2020-02-19 | 2021-12-28 | Globus Medical, Inc. | Displaying a virtual model of a planned instrument attachment to ensure correct selection of physical instrument attachment |
| US11253216B2 (en) | 2020-04-28 | 2022-02-22 | Globus Medical Inc. | Fixtures for fluoroscopic imaging systems and related navigation systems and methods |
| US11510750B2 (en) | 2020-05-08 | 2022-11-29 | Globus Medical, Inc. | Leveraging two-dimensional digital imaging and communication in medicine imagery in three-dimensional extended reality applications |
| US11382700B2 (en) | 2020-05-08 | 2022-07-12 | Globus Medical Inc. | Extended reality headset tool tracking and control |
| US11153555B1 (en) | 2020-05-08 | 2021-10-19 | Globus Medical Inc. | Extended reality headset camera system for computer assisted navigation in surgery |
| CN111528890B (zh) * | 2020-05-09 | 2024-03-15 | 上海联影医疗科技股份有限公司 | 一种医学图像获取方法和系统 |
| US12070276B2 (en) | 2020-06-09 | 2024-08-27 | Globus Medical Inc. | Surgical object tracking in visible light via fiducial seeding and synthetic image registration |
| US11317973B2 (en) | 2020-06-09 | 2022-05-03 | Globus Medical, Inc. | Camera tracking bar for computer assisted navigation during surgery |
| US11382713B2 (en) | 2020-06-16 | 2022-07-12 | Globus Medical, Inc. | Navigated surgical system with eye to XR headset display calibration |
| US11877807B2 (en) | 2020-07-10 | 2024-01-23 | Globus Medical, Inc | Instruments for navigated orthopedic surgeries |
| US11793588B2 (en) | 2020-07-23 | 2023-10-24 | Globus Medical, Inc. | Sterile draping of robotic arms |
| US11737831B2 (en) | 2020-09-02 | 2023-08-29 | Globus Medical Inc. | Surgical object tracking template generation for computer assisted navigation during surgical procedure |
| US11523785B2 (en) | 2020-09-24 | 2022-12-13 | Globus Medical, Inc. | Increased cone beam computed tomography volume length without requiring stitching or longitudinal C-arm movement |
| US12076091B2 (en) | 2020-10-27 | 2024-09-03 | Globus Medical, Inc. | Robotic navigational system |
| US11911112B2 (en) | 2020-10-27 | 2024-02-27 | Globus Medical, Inc. | Robotic navigational system |
| US11941814B2 (en) | 2020-11-04 | 2024-03-26 | Globus Medical Inc. | Auto segmentation using 2-D images taken during 3-D imaging spin |
| US11717350B2 (en) | 2020-11-24 | 2023-08-08 | Globus Medical Inc. | Methods for robotic assistance and navigation in spinal surgery and related systems |
| US20220218431A1 (en) | 2021-01-08 | 2022-07-14 | Globus Medical, Inc. | System and method for ligament balancing with robotic assistance |
| US11857273B2 (en) | 2021-07-06 | 2024-01-02 | Globus Medical, Inc. | Ultrasonic robotic surgical navigation |
| US11439444B1 (en) | 2021-07-22 | 2022-09-13 | Globus Medical, Inc. | Screw tower and rod reduction tool |
| US11918304B2 (en) | 2021-12-20 | 2024-03-05 | Globus Medical, Inc | Flat panel registration fixture and method of using same |
| US12103480B2 (en) | 2022-03-18 | 2024-10-01 | Globus Medical Inc. | Omni-wheel cable pusher |
| US12048493B2 (en) | 2022-03-31 | 2024-07-30 | Globus Medical, Inc. | Camera tracking system identifying phantom markers during computer assisted surgery navigation |
| WO2024224319A1 (en) * | 2023-04-25 | 2024-10-31 | Medtronic Navigation, Inc. | Systems and methods for imaging wide film radiographs |
| CN117838169B (zh) * | 2024-03-08 | 2024-05-24 | 江苏一影医疗设备有限公司 | 一种基于站立位cbct的成像方法、系统和设备 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2001135390A (ru) * | 2001-12-27 | 2004-03-27 | Борис Владимирович Астрахан | Способ выведения больных в положение облучения и устройство для его осуществления |
| WO2005009206A2 (en) * | 2003-06-25 | 2005-02-03 | Besson Guy M | Dynamic multi-spectral imaging system |
| DE102005004502A1 (de) * | 2005-01-31 | 2006-08-10 | "Stiftung Caesar" (Center Of Advanced European Studies And Research) | Tomographiegerät mit variabler Abbildungsgeometrie |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4195227A (en) * | 1978-06-20 | 1980-03-25 | Union Carbide Corporation | Whole body imaging system mechanism |
| JPS62133939A (ja) * | 1985-12-04 | 1987-06-17 | 株式会社東芝 | X線ct装置 |
| US5319693A (en) | 1992-12-30 | 1994-06-07 | General Electric Company | Three dimensional computerized tomography scanning configuration for imaging large objects with smaller area detectors |
| WO2000062674A1 (en) | 1999-04-15 | 2000-10-26 | General Electric Company | Half field of view reduced-size ct detector |
| WO2002026134A1 (en) | 2000-09-28 | 2002-04-04 | Philips Medical Systems Technologies Ltd. | Ct scanner for time-coherent large coverage |
| US6816564B2 (en) | 2000-11-08 | 2004-11-09 | The Johns Hopkins University | Techniques for deriving tissue structure from multiple projection dual-energy x-ray absorptiometry |
| JP3827555B2 (ja) * | 2001-10-29 | 2006-09-27 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | ガントリ装置、x線ctシステム、操作コンソール及びその制御方法、コンピュータプログラム及びコンピュータ可読記憶媒体 |
| EP2915488B1 (en) | 2002-03-19 | 2019-06-05 | Medtronic Navigation, Inc. | Computer tomography with a detector following the movement of a pivotable x-ray source |
| DE10228941A1 (de) * | 2002-06-28 | 2004-01-15 | Philips Intellectual Property & Standards Gmbh | Computer-Tomographiegerät |
| CN100415168C (zh) | 2002-08-21 | 2008-09-03 | 分离成像有限责任公司 | 用于x射线成像的筒形台架定位装置 |
| US6862337B2 (en) * | 2003-06-25 | 2005-03-01 | General Electric Company | Linear track based digital tomosynthesis system and method |
| JP4603823B2 (ja) * | 2003-10-14 | 2010-12-22 | キヤノン株式会社 | 放射線撮像装置、放射線撮像方法及びプログラム |
| US7092481B2 (en) | 2004-05-19 | 2006-08-15 | General Electric Company | Direct conversion energy discriminating CT detector |
-
2007
- 2007-07-24 EP EP07840484.5A patent/EP2053972B1/en active Active
- 2007-07-24 CN CN200780030428.9A patent/CN101505658B/zh active Active
- 2007-07-24 US US12/377,302 patent/US7945012B2/en active Active
- 2007-07-24 RU RU2009109428/14A patent/RU2452385C2/ru not_active IP Right Cessation
- 2007-07-24 WO PCT/US2007/074201 patent/WO2008021671A2/en active Application Filing
- 2007-07-24 JP JP2009524724A patent/JP5337031B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2001135390A (ru) * | 2001-12-27 | 2004-03-27 | Борис Владимирович Астрахан | Способ выведения больных в положение облучения и устройство для его осуществления |
| WO2005009206A2 (en) * | 2003-06-25 | 2005-02-03 | Besson Guy M | Dynamic multi-spectral imaging system |
| DE102005004502A1 (de) * | 2005-01-31 | 2006-08-10 | "Stiftung Caesar" (Center Of Advanced European Studies And Research) | Tomographiegerät mit variabler Abbildungsgeometrie |
Non-Patent Citations (1)
| Title |
|---|
| КАЛЕНДЕР В. Компьютерная томография. - М.: ТЕХНОСФЕРА, 2006. ВИНОГРАДОВ Е.В. и др. Микродозовая флюорография. Современная рентгенография. 19.05.2006. Найдено в Интернете www.fluro.ukrbiz.net. * |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2579815C2 (ru) * | 2011-02-01 | 2016-04-10 | Конинклейке Филипс Н.В. | Способ и система для восстановления изображения компьютерной томографии двойной энергии |
| RU2574422C1 (ru) * | 2013-07-26 | 2016-02-10 | Тсинхуа Юниверсити | Способы реконструкции рентгеновской двухэнергетической компьютерной томографии |
| RU2674650C2 (ru) * | 2014-08-05 | 2018-12-12 | Конинклейке Филипс Н.В. | Устройство-решетка для устройства рентгеновской визуализации |
| RU2703344C1 (ru) * | 2015-10-13 | 2019-10-16 | Электа, Инк. | Формирование псевдо-кт по мр-данным с использованием регрессионной модели на основе признаков |
| US11234654B2 (en) | 2015-10-13 | 2022-02-01 | Elekta, Inc. | Pseudo-CT generation from MR data using a feature regression model |
| US11944463B2 (en) | 2015-10-13 | 2024-04-02 | Elekta, Inc. | Pseudo-CT generation from MR data using a feature regression model |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2053972A2 (en) | 2009-05-06 |
| WO2008021671A2 (en) | 2008-02-21 |
| CN101505658A (zh) | 2009-08-12 |
| US7945012B2 (en) | 2011-05-17 |
| JP5337031B2 (ja) | 2013-11-06 |
| EP2053972B1 (en) | 2013-09-11 |
| RU2009109428A (ru) | 2010-09-27 |
| US20100232565A1 (en) | 2010-09-16 |
| WO2008021671A3 (en) | 2008-04-10 |
| CN101505658B (zh) | 2015-08-19 |
| JP2010500902A (ja) | 2010-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2452385C2 (ru) | Получение компьютерно-томографических изображений | |
| US6922457B2 (en) | Computer tomography apparatus | |
| JP4384766B2 (ja) | 物体の画像を形成する方法及びイメージング・システム | |
| JP4974131B2 (ja) | 複数のオフセットx線照射点を用いるイメージングの方法及びシステム | |
| JP4740516B2 (ja) | コーン・傾斜平行式のサンプリング及び再構成の方法及び装置 | |
| US9237874B2 (en) | Method and system for non-invasive imaging of a target region | |
| JP4991738B2 (ja) | デュアル読取スキャナを用いる撮像方法および装置 | |
| EP1959835B1 (en) | Systems and methods for scanning and data acquisition in computed tomography (ct) applications | |
| US8548117B2 (en) | Semicircular inversed offset scanning for enlarged field of view 3D | |
| JP4440588B2 (ja) | 周期的に運動する被検体のct画像の形成装置およびct装置 | |
| JP2009006133A (ja) | X線ct装置及びその制御方法 | |
| JP2012527934A (ja) | マルチ検出器アレイイメージングシステム | |
| KR20040091559A (ko) | 방사선 계산 단층 화상 장치 | |
| CA2589253C (en) | Method and device for shaping an energy input beam | |
| JP2004113785A (ja) | コンピュータ断層撮影法における画像形成方法およびこの方法を実施するためのct装置 | |
| JP2006528891A (ja) | 改善された効率を有するx線装置 | |
| WO2003028430A2 (en) | Computed tomography with virtual tilt and angulation | |
| JPH10305027A (ja) | 放射線断層撮影方法および装置 | |
| JP2010038594A (ja) | Pet装置 | |
| JP2003204960A (ja) | コンピュータ断層撮影装置 | |
| JP4551612B2 (ja) | コンピュータ断層撮影装置 | |
| JP2000083942A (ja) | 放射線断層撮影方法および装置、放射線検出器並びにx線管 | |
| EP1952766B1 (en) | X-ray CT device | |
| JP4119110B2 (ja) | X線コンピュータ断層撮影装置 | |
| US9784694B2 (en) | X-ray computed tomography apparatus and reconstruction processing method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20200725 |