RU2372535C2 - Устройство увеличения допустимой осевой нагрузки в подшипниковой системе ротора - Google Patents
Устройство увеличения допустимой осевой нагрузки в подшипниковой системе ротора Download PDFInfo
- Publication number
- RU2372535C2 RU2372535C2 RU2005100844/11A RU2005100844A RU2372535C2 RU 2372535 C2 RU2372535 C2 RU 2372535C2 RU 2005100844/11 A RU2005100844/11 A RU 2005100844/11A RU 2005100844 A RU2005100844 A RU 2005100844A RU 2372535 C2 RU2372535 C2 RU 2372535C2
- Authority
- RU
- Russia
- Prior art keywords
- rotor
- stator
- permanent magnet
- bearing system
- air gap
- Prior art date
Links
Images

Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C39/00—Relieving load on bearings
- F16C39/06—Relieving load on bearings using magnetic means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C39/00—Relieving load on bearings
- F16C39/06—Relieving load on bearings using magnetic means
- F16C39/063—Permanent magnets
- F16C39/066—Permanent magnets with opposing permanent magnets repelling each other
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/0408—Passive magnetic bearings
- F16C32/041—Passive magnetic bearings with permanent magnets on one part attracting the other part
- F16C32/0417—Passive magnetic bearings with permanent magnets on one part attracting the other part for axial load mainly
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/0408—Passive magnetic bearings
- F16C32/0423—Passive magnetic bearings with permanent magnets on both parts repelling each other
- F16C32/0427—Passive magnetic bearings with permanent magnets on both parts repelling each other for axial load mainly
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C39/00—Relieving load on bearings
- F16C39/06—Relieving load on bearings using magnetic means
- F16C39/063—Permanent magnets
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2233/00—Monitoring condition, e.g. temperature, load, vibration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C25/00—Bearings for exclusively rotary movement adjustable for wear or play
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/0408—Passive magnetic bearings
- F16C32/041—Passive magnetic bearings with permanent magnets on one part attracting the other part
- F16C32/0412—Passive magnetic bearings with permanent magnets on one part attracting the other part for radial load mainly
- F16C32/0414—Passive magnetic bearings with permanent magnets on one part attracting the other part for radial load mainly with facing axial projections
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49636—Process for making bearing or component thereof
- Y10T29/49696—Mounting
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Magnetic Bearings And Hydrostatic Bearings (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Abstract
Изобретение относится к подшипниковым системам ротора. Устройство увеличения допустимой осевой нагрузки содержит статор и ротор, выполненные с обеспечением увеличения допустимой магнитной осевой нагрузки за счет применения нескольких постоянных магнитов, создающих силу притяжения или силу отталкивания между ротором и статором. Устройство также содержит элемент для регулирования воздушного зазора для компенсации усилия между ротором и статором, которое противодействует внешнему усилию. Технический результат заключается в повышении допустимой осевой нагрузки в подшипниковой системе ротора. 4 н. и 32 з.п. ф-лы, 5 ил.
Description
Область техники
Настоящее изобретение относится к подшипниковым системам ротора. В частности, изобретение относится к устройству и способу увеличения допустимой осевой нагрузки в подшипниковой системе ротора.
Предшествующий уровень техники
В работающих на высокой скорости подшипниковых системах ротора, испытывающих значительные осевые нагрузки, т.е. когда действует значительная нагрузка, параллельная оси вращения, и толкает вал в осевом направлении, создание упорных подшипников, воспринимающих осевое усилие или давление вала, особенно в подшипниковых системах без смазки, является трудной задачей.
Для таких высокоскоростных систем, не имеющих смазки, используются магнитные подшипники, размер которых можно подобрать с учетом наихудших возможных рабочих условий, а также газодинамические подшипники.
Для обеспечения высокой допустимой нагрузки на упорный подшипник в магнитных подшипниковых системах необходимо решить следующие конструкторские задачи:
- высокая допустимая нагрузка означает большую площадь действия усилия в валу, но площадь действия усилия ограничена максимальным наружным диаметром в связи с пределом прочности материала ротора;
- для высокой допустимой нагрузки требуются катушки большого размера и путь магнитного потока в статоре, что обусловливает большие осевые габариты статора, и, в свою очередь, требуется более длинный ротор, но длина ротора ограничена частотой колебаний вала;
- для катушек обычно требуется сильный ток, но однополюсный наконечник не позволяет повысить температуру в обмотке. Кроме того, наличие сильного тока предполагает использование дорогостоящей силовой электроники.
В газодинамических подшипниковых системах, таких как гидростатические или гидродинамические системы, для работающего под высокой осевой нагрузкой подшипника требуется очень большая площадь усилия, которую подчас невозможно обеспечить. В этих системах главная трудность вызвана низкой вязкостью газа, низкой относительной скоростью между ротором и подшипниками вблизи центра вращения и ограниченным обеспечиваемым давлением.
В системах упорных подшипников с элементом качения и в системах гидростатических подшипников сильная нагрузка обусловливает рост потерь в системе, что приводит к низкому кпд и даже к перегреву системы.
Из вышеизложенного очевидно следует необходимость обеспечения компактного, с высоким кпд устройства и способа, обеспечивающих повышение допустимой осевой нагрузки в подшипниковой системе ротора.
Краткое изложение существа изобретения
Задачей настоящего изобретения является создание усовершенствованного устройства и способа для повышения допустимой осевой нагрузки в подшипниковой системе ротора.
Поставленная задача согласно настоящему изобретению решена путем создания устройства для увеличения допустимой осевой нагрузки в подшипниковой системе ротора, которое содержит:
статор, установленный на оси вращения подшипниковой системы ротора;
ротор, отделенный от статора первым воздушным зазором на оси вращения;
по меньшей мере один постоянный магнит, отделенный от ротора вторым воздушным зазором.
Устройство характеризуется тем, что по меньшей мере один постоянный магнит, статор и ротор образуют магнитную цепь, обеспечивающую путь магнитного потока, причем поток в первом и втором воздушных зазорах обеспечивает формирование компенсирующего усилия между ротором и статором, которое противодействует внешнему усилию Fext.
Поставленная задача решена также путем создания способа увеличения допустимой осевой нагрузки в подшипниковой системе ротора, согласно которому:
используют статор, установленный на оси вращения подшипниковой системы ротора;
используют ротор, отделенный от статора первым воздушным зазором на оси вращения;
используют по меньшей мере один постоянный магнит, отделенный от ротора вторым воздушным зазором.
Способ характеризуется тем, что по меньшей мере один постоянный магнит, статор и ротор образуют магнитную цепь, обеспечивающую путь магнитного потока, при этом поток в первом и втором воздушных зазорах обеспечивает формирование компенсирующего усилия между ротором и статором, которое противодействует внешнему усилию Fext.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов его осуществления со ссылками на прилагаемые чертежи, на которых:
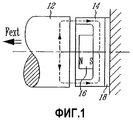
Фиг.1 изображает схему устройства для повышения допустимой нагрузки согласно первому варианту осуществления изобретения;
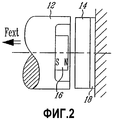
Фиг.2 - схему устройства для повышения допустимой нагрузки согласно второму варианту осуществления изобретения;
Фиг.3 - схему устройства для повышения допустимой нагрузки согласно третьему варианту осуществления настоящего изобретения;
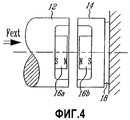
Фиг.4 - схему устройства повышения допустимой нагрузки согласно четвертому варианту осуществления изобретения;
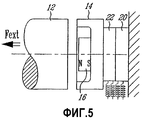
Фиг.5 - схему устройства повышения допустимой нагрузки согласно пятому варианту осуществления настоящего изобретения.
Описание предпочтительных вариантов осуществления настоящего изобретения
Согласно изобретению предложены устройство и способ для увеличения допустимой осевой нагрузки в подшипниковой системе ротора.
Устройство увеличения допустимой нагрузки в подшипниковой системе ротора согласно первому аспекту настоящего изобретения содержит статор и ротор, выполненные с обеспечением увеличения допустимой магнитной осевой нагрузки за счет применения нескольких постоянных магнитов, создающих силу притяжения между ротором и статором, которая противодействует усилию Fext, прилагаемому извне. Внешнее усилие Fext может быть вызвано давлением или силой тяжести при вертикальной конфигурации вала, когда центр тяжести в этой конфигурации расположен низко.
Устройство увеличения допустимой нагрузки содержит статор 14 (фиг.1, 2, 3) и ротор 12, выполненные с возможностью обеспечения компенсирующих усилий между статором 14 и ротором 12.
На Фиг.1 представлен первый вариант осуществления устройства увеличения допустимой нагрузки, которое содержит ротор 12, однополюсный наконечник 14 статора, постоянный магнит 16 и прокладку 18.
Постоянный магнит 16 прикреплен к однополюсному наконечнику 14 статора таким образом, что постоянный магнит 16, однополюсный наконечник 14 и ротор 12 образуют магнитную цепь, причем однополюсный наконечник 14 статора и ротор 12 отделены друг от друга зазором, и также отделены друг от друга зазором ротор 12 и постоянный магнит 16.
Сформированная таким образом магнитная цепь обеспечивает путь магнитного потока, показанного пунктирной линией. Магнитный поток в воздушных зазорах между однополюсным наконечником 14 статора и ротором 12, и ротором 12 и постоянным магнитом 16, соответственно, генерирует силу притяжения, которая в состоянии компенсировать внешнее усилие Fext.
За счет оптимизации конструктивных параметров различных выполненных из мягкого магнитного материала поверхностей полюса, магнита и воздушных зазоров можно использовать минимальный объем магнита с соблюдением ограничений по размерам и воздушным зазорам. После того как определено расположение постоянного магнита 16 по отношению к выполненным из мягкого магнитного материала полюсам, посредством прокладки 18 обеспечивается регулировка воздушных зазоров для изменения величины компенсации, поскольку известное физическое правило заключается в том, что сила действия магнитного поля возрастает с уменьшением воздушного зазора. Эта регулировка обеспечивает гибкость при использовании указанной конструкции, при изготовлении и подборе материалов, и гибкость при изменениях в технологическом процессе.
Во втором варианте осуществления (Фиг.2) устройство увеличения допустимой нагрузки в подшипниковой системе ротора в основном аналогично устройству на Фиг.1. Единственное отличие заключается в том, что магнит 16 установлен в роторе 12 и сила притяжения между ротором 12 и статором 14 создается этим магнитом 16.
Ротор 12 выполнен из мягкого магнитного материала, такого как углеродистая сталь. Однополюсный наконечник 14 статора также выполнен из мягкого магнитного материала, такого как мягкая сталь.
Согласно третьему варианту осуществления (Фиг.3) сила притяжения между ротором 12 и статором 14 создается первым магнитом 16а, установленным в роторе 12, и вторым магнитом 16b, установленным в статоре 14. Каждый магнит 16а, 16b имеет полюсы разной полярности, обращенные друг к другу. Альтернативно, когда ротор 12 и статор 14 выполнены из мягких магнитных материалов, то силу притяжения между ротором 12 и статором 14 можно создать за счет расположения поверхностей полюса между ротором 12 и статором 14.
Согласно второму аспекту настоящего изобретения устройство увеличения допустимой нагрузки в подшипниковой системе ротора содержит статор и ротор, выполненные с обеспечением увеличения допустимой магнитной осевой нагрузки за счет использования нескольких постоянных магнитов, создающих силу отталкивания между ротором и статором.
Силу отталкивания можно сформировать первым магнитом 16а (фиг.4), установленным в роторе 12, и вторым магнитом 16b, установленным в статоре 14. При этом в магнитах 16а и 16b полюсы одинаковой полярности обращены друг к другу, например полюс N магнита 16а обращен к полюсу N магнита 16b.
Из вышеизложенного следует, что либо силу притяжения, либо силу отталкивания можно создать с помощью двух магнитов, за счет изменения расположения полярностей разных магнитов, в зависимости от направления действующих внешних сил.
В обоих случаях, если устройство увеличения допустимой нагрузки в подшипниковой системе ротора, согласно настоящему изобретению, содержит магнит, установленный в роторе, и магнит, установленный в статоре (Фиг.3 и Фиг.4), то ротор 12 и статор 14 могут быть выполнены из немагнитных материалов. Если в роторе 12 и статоре 14 используются мягкие магнитные материалы, то геометрию магнитов и расположение поверхностей полюса и воздушных зазоров можно оптимизировать для использования минимального объема магнитов, что обеспечивает компактность и экономию затрат. Если для статора 14 и ротора 12 используются мягкие магнитные материалы, то усилие, создаваемое в воздушном зазоре между ними, также способствует созданию компенсирующего усилия. Поэтому для магнита требуется меньшее количество материала. Но этот вариант может оказаться очень дорогостоящим, поскольку мягкие магнитные материалы могут быть довольно дорогими.
Прокладка 18 позволяет изменять воздушные зазоры и, таким образом, регулировать компенсирующее усилие.
Если требуется автоматическая регулировка или регулировка на месте компенсирующего усилия, то можно использовать пьезоэлектрический исполнительный механизм 20 (фиг.5) (вместо прокладки) для регулировки воздушных зазоров, которая, в свою очередь, будет изменять компенсирующее усилие.
Специалистам в данной области техники ясно, что конфигурацию, представленную на Фиг.5, можно использовать для компенсирования внешнего динамического усилия, если сигнал динамической компенсации подается на пьезоэлектрический исполнительный механизм 20.
Для измерения компенсирующего усилия устройство увеличения допустимой нагрузки в подшипниковой системе ротора можно обеспечить устройствами 22 (фиг.5) измерения усилия, такими как тензометры или пьезоэлектрические элементы. Это целесообразно для осуществления непрерывного контроля. В активных магнитных подшипниковых системах целесообразно использовать усилие (динамическое или статическое), обеспечиваемое активным подшипником. Поэтому с помощью представленного на Фиг.5 устройства измерения усилия можно измерять усилие, компенсируемое устройством увеличения допустимой нагрузки в подшипниковой системе ротора. Таким образом, можно определить общее внешнее усилие, прилагаемое на вал.
Согласно третьему аспекту настоящего изобретения предложен способ достижения увеличения допустимой нагрузки другого уровня за счет регулирования магнитного воздушного зазора между статором и ротором. Раскрытое выше устройство увеличения допустимой нагрузки в подшипниковой системе ротора позволяет создавать усилие между статором и ротором, компенсирующее внешнее усилие Fext.
Регулирование можно обеспечить посредством прокладки (Фиг.1) или автоматически посредством исполнительного механизма, например пьезоэлектрическим элементом, установленным в статоре (Фиг.5).
Усилие, обеспечиваемое устройством увеличения допустимой нагрузки в подшипниковой системе ротора, можно измерять либо тензометром, либо пьезоэлектрическим элементом (Фиг.5).
Способ согласно третьему аспекту настоящего изобретения предусматривает использование мягких магнитных материалов для выполнения статора и ротора, что позволяет оптимизировать применение создающих компенсирующее усилие магнитов (Фиг.1-4), или использование прокладки для регулирования компенсирующего усилия, или использование пьезоэлектрического исполнительного механизма для автоматической регулировки компенсирующего усилия (как статического, так и/или динамического), или использование тензометра или пьезоэлектрического элемента для измерения компенсирующего усилия, или установку устройства увеличения допустимой нагрузки в конце вала, в результате чего исключается необходимость модифицирования длины вала.
Из вышеизложенного ясно, что в конструкцию можно вносить изменения согласно конкретным вариантам применения. Например, если важно свести к минимуму длину вала, то целесообразной может стать конфигурация, представленная на Фиг.1.
Способ согласно настоящему изобретению обеспечивает возможность увеличения допустимой магнитной осевой нагрузки и при этом исключает необходимость применения твердых или жидких контактов, т.е. с помощью бесконтактных средств.
Применение настоящего изобретения может быть целесообразным в системах, в которых осевое усилие является однонаправленным либо со стороны внешней рабочей нагрузки, либо со стороны веса ротора в вертикальной конфигурации.
Предложенное устройство и способ увеличения допустимой нагрузки в подшипниковой системе ротора согласно настоящему изобретению можно использовать в магнитной подшипниковой системе, гидростатической подшипниковой системе, гидродинамической подшипниковой системе или подшипниковой системе с элементом качения. Например, настоящее изобретение можно использовать для компенсации однонаправленной внешней статической нагрузки, такой как рабочая нагрузка, например статическое давление, или вес вала в вертикальной конфигурации.
В соответствии с настоящим изобретением можно обеспечить компактное и недорогостоящее средство для компенсации осевой нагрузки - упорный подшипник и устройство увеличения допустимой осевой нагрузки.
Можно также компенсировать динамическую нагрузку, если она измеряется и исполнительный механизм выполнен согласно Фиг.5.
Поскольку устройство увеличения допустимой нагрузки согласно настоящему изобретению можно установить на одном конце вала (Фиг.1-5), длину вала не нужно модифицировать.
Из вышеизложенного ясно, что изобретение позволяет исключить потери на трение при непосредственном контакте, например, упорных подшипников с элементом качения или гидростатических упорных подшипников. Поскольку по сравнению с системами упорных подшипников можно использовать значительно большие зазоры между ротором и статором, настоящее изобретение обеспечивает возможность минимальных потерь на обмотку.
Claims (36)
1. Устройство увеличения допустимой осевой нагрузки в подшипниковой системе ротора, содержащее
статор, установленный на оси (X) вращения подшипниковой системы ротора;
ротор, установленный на оси (X) вращения и отделенный от статора по оси (X) вращения первым воздушным зазором для магнитного потока, и
по меньшей мере один постоянный магнит, прикрепленный к статору или ротору и отделенный соответственно от ротора или от статора вторым воздушным зазором для магнитного потока, и
элемент для регулирования воздушного зазора,
отличающееся тем, что указанный элемент регулирования воздушного зазора предназначен для регулирования указанного первого или второго воздушного зазора для магнитного потока для компенсации усилия между ротором и статором, которое противодействует внешнему усилию Fext.
статор, установленный на оси (X) вращения подшипниковой системы ротора;
ротор, установленный на оси (X) вращения и отделенный от статора по оси (X) вращения первым воздушным зазором для магнитного потока, и
по меньшей мере один постоянный магнит, прикрепленный к статору или ротору и отделенный соответственно от ротора или от статора вторым воздушным зазором для магнитного потока, и
элемент для регулирования воздушного зазора,
отличающееся тем, что указанный элемент регулирования воздушного зазора предназначен для регулирования указанного первого или второго воздушного зазора для магнитного потока для компенсации усилия между ротором и статором, которое противодействует внешнему усилию Fext.
2. Устройство по п.1, отличающееся тем, что внешнее усилие Fext вызвано действием, выбранным из группы, состоящей из давления и силы тяжести при вертикальной конфигурации вала, в которой центр тяжести расположен низко.
3. Устройство по п.1, отличающееся тем, что упомянутый по меньшей мере один постоянный магнит прикреплен к статору и отделен от ротора вторым воздушным зазором для магнитного потока.
4. Устройство по п.1, отличающееся тем, что упомянутый по меньшей мере один постоянный магнит прикреплен к ротору и отделен от статора вторым воздушным зазором для магнитного потока.
5. Устройство по п.1, отличающееся тем, что первый магнит из по меньшей мере одного постоянного магнита прикреплен к статору, а второй магнит из по меньшей мере одного постоянного магнита прикреплен к ротору, при этом второй воздушный зазор отделяет первый постоянный магнит от ротора и второй постоянный магнит от статора соответственно.
6. Устройство по п.5, отличающееся тем, что статор и ротор выполнены из немагнитных материалов.
7. Устройство по п.5, отличающееся тем, что первый магнит из по меньшей мере одного постоянного магнита и второй магнит из по меньшей мере одного постоянного магнита соответственно имеют полюсы разной полярности, обращенные друг к другу для создания компенсирующей силы притяжения между ротором и статором.
8. Устройство по п.5, отличающееся тем, что первый магнит из по меньшей мере одного постоянного магнита и второй магнит из по меньшей мере одного постоянного магнита соответственно имеют полюсы одинаковой полярности, обращенные друг к другу для создания компенсирующей силы отталкивания между ротором и статором.
9. Устройство по п.1, отличающееся тем, что элемент для регулирования воздушного зазора представляет собой разделительный элемент.
10. Устройство по п.1, отличающееся тем, что элемент для регулирования воздушного зазора представляет собой пьезоэлектрический исполнительный механизм, закрепленный на статоре.
11. Устройство по п.5, отличающееся тем, что ротор и статор выполнены из материала, выбранного из группы, состоящей из магнитомягкого материала и немагнитного материала.
12. Устройство по п.1, отличающееся тем, что ротор выполнен из углеродистой стали, а статор выполнен из мягкой стали.
13. Устройство по п.1, отличающееся тем, что внешнее усилие представляет собой усилие, выбранное из группы, состоящей из статического усилия и динамического усилия.
14. Устройство по п.1, отличающееся тем, что дополнительно содержит устройства измерения усилия, предназначенные для измерения компенсирующего усилия.
15. Устройство по п.14, отличающееся тем, что указанные устройства измерения усилия выбраны из группы, состоящей из тензометров и пьезоэлектрических элементов.
16. Устройство по п.1, отличающееся тем, что оно расположено на одном конце вала подшипниковой системы ротора.
17. Устройство по п.1, отличающееся тем, что оно является однонаправленным от внешней рабочей нагрузки.
18. Устройство по п.1, отличающееся тем, что оно является однонаправленным от веса ротора в вертикальной конфигурации.
19. Устройство по п.1, отличающееся тем, что внешнее усилие является однонаправленной внешней статической нагрузкой, выбранной из группы, состоящей из рабочей нагрузки и веса вала в вертикальной конфигурации.
20. Устройство по п.1, отличающееся тем, что подшипниковая система ротора выбрана из группы, состоящей из магнитной подшипниковой системы, гидростатической подшипниковой системы, гидродинамической подшипниковой системы и подшипниковой системы с элементом качения.
21. Способ увеличения допустимой осевой нагрузки в подшипниковой системе ротора, заключающийся в том, что
используют статор, установленный на оси (X) вращения подшипниковой системы ротора,
используют ротор, установленный на оси (X) вращения и отделенный от статора по оси (X) вращения первым воздушным зазором для магнитного потока, и
используют по меньшей мере один постоянный магнит, прикрепленный к статору или ротору и отделенный соответственно от ротора или от статора вторым воздушным зазором для магнитного потока,
регулируют первый или второй воздушные зазоры, для чего используют элемент для регулирования первого или второго воздушного зазора в соответствии с внешним усилием Fext,
при этом формируют компенсирующее усилие между ротором и статором, которое противодействует внешнему усилию Fext.
используют статор, установленный на оси (X) вращения подшипниковой системы ротора,
используют ротор, установленный на оси (X) вращения и отделенный от статора по оси (X) вращения первым воздушным зазором для магнитного потока, и
используют по меньшей мере один постоянный магнит, прикрепленный к статору или ротору и отделенный соответственно от ротора или от статора вторым воздушным зазором для магнитного потока,
регулируют первый или второй воздушные зазоры, для чего используют элемент для регулирования первого или второго воздушного зазора в соответствии с внешним усилием Fext,
при этом формируют компенсирующее усилие между ротором и статором, которое противодействует внешнему усилию Fext.
22. Способ по п.21, отличающийся тем, что используют статор, выполненный из мягкой стали, и используют ротор, выполненный из углеродистой стали.
23. Способ по п.21, отличающийся тем, что по меньшей мере один постоянный магнит устанавливают на статоре, при этом второй воздушный зазор для магнитного потока отделяет указанный по меньшей мере один постоянный магнит от ротора.
24. Способ по п.21, отличающийся тем, что по меньшей мере один постоянный магнит устанавливают на роторе, при этом второй воздушный зазор для магнитного потока отделяет указанный по меньшей мере один постоянный магнит от статора.
25. Способ по п.21, отличающийся тем, что закрепляют первый магнит из по меньшей мере одного постоянного магнита на статоре и второй магнит из по меньшей мере одного постоянного магнита - на роторе, при этом второй воздушный зазор для магнитного потока отделяет указанные первый постоянный магнит от ротора и второй постоянный магнит от статора.
26. Способ по п.25, отличающийся тем, что в качестве статора и в качестве ротора используют статор и ротор, выполненные из материала, выбранного из группы, состоящей из мягкого магнитного материала и немагнитного материала.
27. Способ по п.25, отличающийся тем, что при закреплении по меньшей мере первого постоянного магнита на статоре и второго постоянного магнита на роторе обеспечивают расположение соответствующих полюсов разной полярности, обращенных друг к другу, для создания компенсирующей силы притяжения между ротором и статором.
28. Способ по п.25, отличающийся тем, что при закреплении первого постоянного магнита на статоре и второго постоянного магнита на роторе обеспечивают расположение соответствующих полюсов одинаковой полярности, обращенных друг к другу, для создания компенсирующей силы отталкивания между ротором и статором.
29. Способ по любому из пп.21-28, отличающийся тем, что в качестве разделительного элемент для регулирования воздушного зазора для магнитного потока используют пьезоэлектрический исполнительный механизм.
30. Способ по любому из пп.21-28, отличающийся тем, что пьезоэлектрический исполнительный механизм закрепляют на статоре.
31. Способ по любому из пп.21-28, отличающийся тем, что внешнее усилие выбирают из группы, состоящей из статического усилия и динамического усилия.
32. Способ по любому из пп.21-28, отличающийся тем, что дополнительно используют устройства измерения усилия, предназначенные для измерения компенсирующего усилия.
33. Способ по п.32, отличающийся тем, что устройства измерения усилия выбирают из группы, состоящей из тензометров и пьезоэлектрических элементов.
34. Способ по п.21, отличающийся тем, что подшипниковую систему выбирают из группы, состоящей из магнитной подшипниковой системы, гидростатической подшипниковой системы, гидродинамической подшипниковой системы и подшипниковой системы с элементом качения.
35. Устройство увеличения допустимой осевой нагрузки в подшипниковой системе ротора, содержащее
статор, установленный на оси вращения подшипниковой системы ротора;
ротор, установленный на оси вращения подшипниковой системы ротора и отделенный от статора по оси вращения первым воздушным зазором для магнитного потока, и
по меньшей мере один постоянный магнит, установленный на оси вращения подшипниковой системы ротора,
при этом указанный по меньшей мере один постоянный магнит прикреплен к статору или ротору и отделен соответственно от статора или ротора вторым воздушным зазором для магнитного потока, причем указанный по меньшей мере один постоянный магнит, статор и ротор образуют магнитную цепь, характеризующуюся линией магнитного потока,
первый и второй воздушные зазоры являются регулируемыми,
причем магнитный поток в первом и втором воздушных зазорах обеспечивает формирование компенсирующего усилия между статором и ротором, которое противодействует внешнему усилию Fext.
статор, установленный на оси вращения подшипниковой системы ротора;
ротор, установленный на оси вращения подшипниковой системы ротора и отделенный от статора по оси вращения первым воздушным зазором для магнитного потока, и
по меньшей мере один постоянный магнит, установленный на оси вращения подшипниковой системы ротора,
при этом указанный по меньшей мере один постоянный магнит прикреплен к статору или ротору и отделен соответственно от статора или ротора вторым воздушным зазором для магнитного потока, причем указанный по меньшей мере один постоянный магнит, статор и ротор образуют магнитную цепь, характеризующуюся линией магнитного потока,
первый и второй воздушные зазоры являются регулируемыми,
причем магнитный поток в первом и втором воздушных зазорах обеспечивает формирование компенсирующего усилия между статором и ротором, которое противодействует внешнему усилию Fext.
36. Способ увеличения допустимой осевой нагрузки в подшипниковой системе ротора, заключающийся в том, что
используют статор, установленный на оси вращения подшипниковой системы ротора,
используют ротор, установленный на оси вращения подшипниковой системы ротора и отдельный по оси вращения от статора первым воздушным зазором для магнитного потока, и
используют по меньшей мере один постоянный магнит, установленный на оси вращения и отделенный соответственно от ротора или от статора вторым воздушным зазором для магнитного потока,
регулируют первый и второй воздушные зазоры для формирования компенсирующего усилия между ротором и статором, которое противодействует внешнему усилию Fext.
используют статор, установленный на оси вращения подшипниковой системы ротора,
используют ротор, установленный на оси вращения подшипниковой системы ротора и отдельный по оси вращения от статора первым воздушным зазором для магнитного потока, и
используют по меньшей мере один постоянный магнит, установленный на оси вращения и отделенный соответственно от ротора или от статора вторым воздушным зазором для магнитного потока,
регулируют первый и второй воздушные зазоры для формирования компенсирующего усилия между ротором и статором, которое противодействует внешнему усилию Fext.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US39452802P | 2002-07-10 | 2002-07-10 | |
| US60/394,528 | 2002-07-10 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2005100844A RU2005100844A (ru) | 2005-08-10 |
| RU2372535C2 true RU2372535C2 (ru) | 2009-11-10 |
Family
ID=30115730
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2005100844/11A RU2372535C2 (ru) | 2002-07-10 | 2003-06-18 | Устройство увеличения допустимой осевой нагрузки в подшипниковой системе ротора |
Country Status (10)
| Country | Link |
|---|---|
| US (2) | US7800268B2 (ru) |
| EP (1) | EP1520112A1 (ru) |
| JP (1) | JP2005532516A (ru) |
| KR (1) | KR20050025339A (ru) |
| CN (1) | CN100368696C (ru) |
| AU (1) | AU2003245151B2 (ru) |
| BR (1) | BR0312576A (ru) |
| CA (1) | CA2492069A1 (ru) |
| RU (1) | RU2372535C2 (ru) |
| WO (1) | WO2004007984A1 (ru) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2475928C1 (ru) * | 2011-06-16 | 2013-02-20 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Уфимский государственный авиационный технический университет" | Высокоскоростная магнитоэлектрическая машина с вертикальным валом |
| RU2529759C1 (ru) * | 2010-07-02 | 2014-09-27 | Атлас Копко Эрпауэр, Намлозе Веннотсхап | Способ управления компрессорным элементом в винтовом компрессоре |
| RU2626461C1 (ru) * | 2016-02-25 | 2017-07-28 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Уфимский государственный авиационный технический университет" | Система на магнитных подшипниках |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100368696C (zh) * | 2002-07-10 | 2008-02-13 | 特伯考尔公司 | 利用永磁体减轻转子-支承系统中推力负荷的装置 |
| JP4649136B2 (ja) * | 2003-07-31 | 2011-03-09 | キヤノン株式会社 | アクチュエータ、露光装置及びデバイス製造方法 |
| US7391128B2 (en) | 2004-12-30 | 2008-06-24 | Rozlev Corp., Llc | Wind generator system using attractive magnetic forces to reduce the load on the bearings |
| US7327060B2 (en) | 2004-12-30 | 2008-02-05 | Rozlev Corp., Llc | Bearing assembly having a mechanical component and using attractive magnetic forces |
| WO2006074069A2 (en) * | 2004-12-30 | 2006-07-13 | Rozlev Corp., Llc | A bearing assembly having mechanical bearings and using attractive magnetic forces to relieve the load on the mechanical bearings |
| AU2008212433B2 (en) * | 2007-02-06 | 2011-08-11 | Honda Motor Co., Ltd. | Motor, rotor structure and magnetic machine |
| JP4994971B2 (ja) * | 2007-06-29 | 2012-08-08 | アネスト岩田株式会社 | 磁気軸受及び磁気カップリング装置並びにこれらを用いたスクロール型流体機械 |
| DE102007032443A1 (de) * | 2007-07-10 | 2009-01-15 | Voith Patent Gmbh | Hybridlager und Verfahren zu dessen Herstellung |
| US20090277400A1 (en) * | 2008-05-06 | 2009-11-12 | Ronald David Conry | Rankine cycle heat recovery methods and devices |
| US8317651B2 (en) | 2008-05-07 | 2012-11-27 | Fallbrook Intellectual Property Company Llc | Assemblies and methods for clamping force generation |
| US8269388B2 (en) * | 2009-02-02 | 2012-09-18 | Aktiebolaget Skf | Magnetic bearing assembly for rotors |
| BE1018544A3 (nl) * | 2009-04-28 | 2011-03-01 | Atlas Copco Airpower Nv | Inrichting voor het opnemen van een axiale kracht uitgeoefend op een as van een machine en een centrifugaalcompressor van zulke inrichting voorzien. |
| KR101568422B1 (ko) * | 2009-05-06 | 2015-11-12 | 주식회사 포스코 | 롤축을 지지하는 마그네틱 베어링 장치 |
| WO2010131968A2 (en) * | 2009-05-13 | 2010-11-18 | Hydroring Capital B.V. | Bearing for energy converter for flowing fluids and gases |
| WO2010136325A2 (de) * | 2009-05-29 | 2010-12-02 | Siemens Aktiengesellschaft | Lageranordnung für ein berührungsloses magnetisches axiallager und röntgenröhre mit diesem lager |
| CN102711975B (zh) * | 2009-10-21 | 2015-06-17 | 梅特诺瓦控股有限公司 | 用于搅拌的装置 |
| KR100986151B1 (ko) * | 2010-04-01 | 2010-10-08 | 유영실 | 자기력 평형 전기발생장치 |
| FR2971826B1 (fr) * | 2011-02-23 | 2013-03-01 | Atmostat | Dispositif tournant notamment pour volant d'inertie |
| CN104953780A (zh) | 2012-08-03 | 2015-09-30 | 埃塞克科技有限公司 | 模块化旋转横向磁通发电机 |
| CA2827657A1 (en) | 2012-09-24 | 2014-03-24 | Eocycle Technologies Inc. | Modular transverse flux electrical machine |
| CA2829812A1 (en) | 2012-10-17 | 2014-04-17 | Eocycle Technologies Inc. | Transverse flux electrical machine rotor |
| DE102013102805A1 (de) * | 2013-03-19 | 2014-09-25 | Aker Wirth Gmbh | Kraftdrehkopf für ein Bohrgestänge |
| US10357748B2 (en) * | 2014-03-28 | 2019-07-23 | Asepco | Magnetically coupled mixer with thrust bearing friction control |
| CN106089708A (zh) * | 2016-07-29 | 2016-11-09 | 扬州日上真空设备有限公司 | 复合双螺杆真空泵 |
| CN107060909B (zh) * | 2016-12-17 | 2019-10-11 | 山东天瑞重工有限公司 | 一种带有新型推力轴承结构的透平机械 |
| US11566663B2 (en) | 2019-06-26 | 2023-01-31 | Trane International Inc. | Bearing for supporting a rotating compressor shaft |
| JP7400249B2 (ja) | 2019-07-31 | 2023-12-19 | ニデック株式会社 | 気体動圧軸受、モータ、ファンモータおよび直列式ファンモータ |
| DE102020104778A1 (de) | 2020-02-24 | 2021-08-26 | Minebea Mitsumi Inc. | Linearstellantrieb und Ventileinrichtung zur Steuerung eines Fluidstroms |
| US11460038B2 (en) | 2020-05-28 | 2022-10-04 | Halliburton Energy Services, Inc. | Hybrid magnetic radial bearing in an electric submersible pump (ESP) assembly |
| US11739617B2 (en) | 2020-05-28 | 2023-08-29 | Halliburton Energy Services, Inc. | Shielding for a magnetic bearing in an electric submersible pump (ESP) assembly |
| US11512707B2 (en) | 2020-05-28 | 2022-11-29 | Halliburton Energy Services, Inc. | Hybrid magnetic thrust bearing in an electric submersible pump (ESP) assembly |
| WO2023032812A1 (ja) * | 2021-08-30 | 2023-03-09 | 有限会社宮脇工房 | 軸受及び回転装置 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2782354A (en) * | 1954-01-28 | 1957-02-19 | Albert G Thomas | Motor |
| DE1575605A1 (de) | 1966-04-26 | 1970-02-05 | Siemens Ag | Magnetisches Lager,vorzugsweise Schwebelager,fuer stehende Wellen,insbesondere fuer die Laeuferwelle eines Elektrizitaetszaehlers |
| CH555487A (de) | 1972-03-20 | 1974-10-31 | Padana Ag | Magnetische lagerungseinrichtung fuer einen rotor an einem stator. |
| US4167295A (en) * | 1977-12-08 | 1979-09-11 | The Garrett Corporation | Magnetic thrust force relief for a foil bearing turbomachine |
| JPS55145816A (en) * | 1979-04-28 | 1980-11-13 | Mitsubishi Precision Co Ltd | Magnetically floatingly supported rotary wheel |
| JPS62270824A (ja) | 1986-05-16 | 1987-11-25 | Natl Aerospace Lab | 軸方向剛性の高いラジアル制御型磁気軸受 |
| EP0266991A3 (en) * | 1986-11-07 | 1989-05-03 | Hewlett-Packard Company | Magnetic preload for motor shaft bearing |
| JPS63303216A (ja) | 1987-06-01 | 1988-12-09 | Fuji Electric Co Ltd | 磁気軸受装置 |
| JPH03215154A (ja) * | 1990-01-19 | 1991-09-20 | Matsushita Electric Ind Co Ltd | モータ |
| JPH0478315A (ja) * | 1990-07-19 | 1992-03-12 | Nippon Seiko Kk | 軸受装置 |
| JPH04307108A (ja) * | 1991-04-04 | 1992-10-29 | Ebara Corp | 動圧軸受装置 |
| US5360470A (en) * | 1992-07-06 | 1994-11-01 | Fujitsu Limited | Magnetic levitating transporting apparatus with a movable magnetic unit |
| JP3209844B2 (ja) | 1993-11-22 | 2001-09-17 | 富士通株式会社 | 磁気浮上搬送装置 |
| US5291975A (en) * | 1992-10-27 | 1994-03-08 | Satcon Technology Corporation | System and method for damping narrow band axial vibrations of a rotating device |
| DE19500935C2 (de) | 1994-01-14 | 1997-10-02 | Univ Stuttgart | Lageranordnung |
| DE4427153A1 (de) * | 1994-08-01 | 1996-02-08 | Balzers Pfeiffer Gmbh | Fluteinrichtung für magnetisch gelagerte Vakuumpumpen |
| CN1120256A (zh) * | 1994-12-06 | 1996-04-10 | 顾衣楚 | 碳钢转子铁心异步电动机 |
| JPH08296645A (ja) | 1995-04-27 | 1996-11-12 | Nippon Seiko Kk | 磁気軸受装置 |
| GB9613061D0 (en) * | 1995-09-02 | 1996-08-28 | Magnetic Patent Holdings Ltd | Magnetic suspension system |
| DE29700576U1 (de) | 1997-01-15 | 1997-02-27 | Skf Gmbh | Lagerung von Rollen |
| US5894181A (en) * | 1997-07-18 | 1999-04-13 | Imlach; Joseph | Passive magnetic bearing system |
| GB2335242A (en) * | 1998-03-12 | 1999-09-15 | Copal Electronics | Rotor support with one or two pairs of permanent magnetic bearings and a pivot |
| DE19908349A1 (de) * | 1999-02-26 | 2000-08-31 | Elektrische Automatisierungs U | Kombiniertes Schwebe-Antriebssystem |
| US6191515B1 (en) * | 1999-09-03 | 2001-02-20 | The Regents Of The University Of California | Combined passive magnetic bearing element and vibration damper |
| CN100368696C (zh) * | 2002-07-10 | 2008-02-13 | 特伯考尔公司 | 利用永磁体减轻转子-支承系统中推力负荷的装置 |
| JP4307108B2 (ja) | 2003-03-03 | 2009-08-05 | キヤノン株式会社 | オルトベンジジン化合物の製造法 |
| JP4078315B2 (ja) | 2004-02-04 | 2008-04-23 | 三菱重工業株式会社 | ひずみ計測装置及び計測方法 |
| KR100606935B1 (ko) * | 2004-08-23 | 2006-08-01 | 동부일렉트로닉스 주식회사 | 반도체 소자의 제조방법 |
-
2003
- 2003-06-18 CN CNB03819208XA patent/CN100368696C/zh not_active Expired - Lifetime
- 2003-06-18 RU RU2005100844/11A patent/RU2372535C2/ru not_active IP Right Cessation
- 2003-06-18 WO PCT/CA2003/000926 patent/WO2004007984A1/en active Application Filing
- 2003-06-18 CA CA002492069A patent/CA2492069A1/en not_active Abandoned
- 2003-06-18 EP EP03737780A patent/EP1520112A1/en not_active Withdrawn
- 2003-06-18 US US10/520,798 patent/US7800268B2/en active Active
- 2003-06-18 KR KR1020057000469A patent/KR20050025339A/ko not_active Application Discontinuation
- 2003-06-18 BR BR0312576-9A patent/BR0312576A/pt not_active IP Right Cessation
- 2003-06-18 AU AU2003245151A patent/AU2003245151B2/en not_active Ceased
- 2003-06-18 JP JP2004520212A patent/JP2005532516A/ja active Pending
-
2010
- 2010-09-16 US US12/883,668 patent/US8030814B2/en not_active Expired - Lifetime
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2529759C1 (ru) * | 2010-07-02 | 2014-09-27 | Атлас Копко Эрпауэр, Намлозе Веннотсхап | Способ управления компрессорным элементом в винтовом компрессоре |
| RU2475928C1 (ru) * | 2011-06-16 | 2013-02-20 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Уфимский государственный авиационный технический университет" | Высокоскоростная магнитоэлектрическая машина с вертикальным валом |
| RU2626461C1 (ru) * | 2016-02-25 | 2017-07-28 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Уфимский государственный авиационный технический университет" | Система на магнитных подшипниках |
Also Published As
| Publication number | Publication date |
|---|---|
| BR0312576A (pt) | 2005-04-19 |
| JP2005532516A (ja) | 2005-10-27 |
| CN1675477A (zh) | 2005-09-28 |
| CA2492069A1 (en) | 2004-01-22 |
| US7800268B2 (en) | 2010-09-21 |
| WO2004007984A1 (en) | 2004-01-22 |
| US20110002566A1 (en) | 2011-01-06 |
| US20070040464A2 (en) | 2007-02-22 |
| US8030814B2 (en) | 2011-10-04 |
| CN100368696C (zh) | 2008-02-13 |
| US20060012258A1 (en) | 2006-01-19 |
| EP1520112A1 (en) | 2005-04-06 |
| AU2003245151A1 (en) | 2004-02-02 |
| RU2005100844A (ru) | 2005-08-10 |
| KR20050025339A (ko) | 2005-03-14 |
| AU2003245151B2 (en) | 2008-11-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2372535C2 (ru) | Устройство увеличения допустимой осевой нагрузки в подшипниковой системе ротора | |
| US5319273A (en) | Fixed gain electromagnetic actuator and electromagnetic bearing incorporating same | |
| US4379598A (en) | Magnetic bearing | |
| US6304015B1 (en) | Magneto-dynamic bearing | |
| KR100701550B1 (ko) | 베어링리스 스텝모터 | |
| US6469411B2 (en) | Compliant foil fluid film bearing with eddy current damper | |
| WO2014099845A1 (en) | Magnetic thrust bearing | |
| US10830278B2 (en) | Halbach-array levitating passive magnetic bearing configuration | |
| US20130207496A1 (en) | System and method for performing magnetic levitation in an energy storage flywheel | |
| EP0763169B1 (en) | Dc-biased axial magnetic bearing | |
| JPH08296645A (ja) | 磁気軸受装置 | |
| Allaire et al. | Low power magnetic bearing design for high speed rotating machinery | |
| JPS63210414A (ja) | 磁気軸受装置 | |
| RU2672344C2 (ru) | Устройство для магнитной установки вала | |
| KR100460130B1 (ko) | 로렌쯔 힘을 이용한 수동/능동 겸용 자기 베어링 | |
| JPH0356711A (ja) | 磁気軸受装置 | |
| Weise | Present industrial applications of active magnetic bearings | |
| Ho et al. | Rotor dynamic coefficients of a thrust active magnetic bearing considering runner tilt | |
| JPH01182648A (ja) | 回転機械の軸方向吸振装置 | |
| Roberts | The multiple attractions of magnetic bearings | |
| CN117856524A (zh) | 可实现偏置式旋转运动的液粘—磁悬浮传动装置及控制方法 | |
| Ohji et al. | Development of a polygon scanner motor using single-axis controlled repulsive type magnetic bearing system | |
| ROTOR | Copyright© 1984 by ASME | |
| Chen et al. | Rotordynamics of a Passive Magnet Bearing System | |
| Habermann et al. | The Active Magnetic Bearing Enables Optimum Control of Machine Vibrations |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20100619 |