KR920000673B1 - 웨이퍼 지지기구 - Google Patents
웨이퍼 지지기구 Download PDFInfo
- Publication number
- KR920000673B1 KR920000673B1 KR1019870008806A KR870008806A KR920000673B1 KR 920000673 B1 KR920000673 B1 KR 920000673B1 KR 1019870008806 A KR1019870008806 A KR 1019870008806A KR 870008806 A KR870008806 A KR 870008806A KR 920000673 B1 KR920000673 B1 KR 920000673B1
- Authority
- KR
- South Korea
- Prior art keywords
- wafer
- shaft
- drive shaft
- chuck
- rotating
- Prior art date
Links
- 238000004381 surface treatment Methods 0.000 claims description 22
- 239000000463 material Substances 0.000 claims description 16
- 238000000034 method Methods 0.000 claims description 3
- 235000012431 wafers Nutrition 0.000 description 120
- 239000007788 liquid Substances 0.000 description 12
- 230000007797 corrosion Effects 0.000 description 3
- 238000005260 corrosion Methods 0.000 description 3
- 239000000428 dust Substances 0.000 description 3
- 239000000758 substrate Substances 0.000 description 3
- 238000003825 pressing Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000002457 bidirectional effect Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 238000005507 spraying Methods 0.000 description 1
Images











Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/04—Manufacture or treatment of semiconductor devices or of parts thereof the devices having potential barriers, e.g. a PN junction, depletion layer or carrier concentration layer
- H01L21/18—Manufacture or treatment of semiconductor devices or of parts thereof the devices having potential barriers, e.g. a PN junction, depletion layer or carrier concentration layer the devices having semiconductor bodies comprising elements of Group IV of the Periodic Table or AIIIBV compounds with or without impurities, e.g. doping materials
- H01L21/30—Treatment of semiconductor bodies using processes or apparatus not provided for in groups H01L21/20 - H01L21/26
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68714—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support
- H01L21/68728—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support characterised by a plurality of separate clamping members, e.g. clamping fingers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05C—APPARATUS FOR APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05C11/00—Component parts, details or accessories not specifically provided for in groups B05C1/00 - B05C9/00
- B05C11/02—Apparatus for spreading or distributing liquids or other fluent materials already applied to a surface ; Controlling means therefor; Control of the thickness of a coating by spreading or distributing liquids or other fluent materials already applied to the coated surface
- B05C11/08—Spreading liquid or other fluent material by manipulating the work, e.g. tilting
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67017—Apparatus for fluid treatment
- H01L21/67023—Apparatus for fluid treatment for general liquid treatment, e.g. etching followed by cleaning
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68714—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support
- H01L21/68792—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support characterised by the construction of the shaft
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S134/00—Cleaning and liquid contact with solids
- Y10S134/902—Semiconductor wafer
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Cleaning Or Drying Semiconductors (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Photosensitive Polymer And Photoresist Processing (AREA)
Abstract
내용 없음.
Description
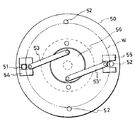
제1도는 웨이퍼를 회전시키면서 표면처리를 시행하는 장치에서 웨이퍼 지지기구의 제1실시예의 종단면도.
제2도는 제1도의 기구의 평면도.
제3도는 본 발명에 관련된 기구의 제2실시예를 나타낸 종 단면도.
제4도는 제3도의 기구의 평면도.
제5도는 제2실시예의 웨이퍼 해지기구의 요부를 나타내는 종 단면도.
제6도는 제5도의 웨이퍼 해지기구의 사시도.
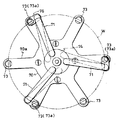
제7도는 본 발명에 관련된 기구의 제3 실시예를 나타낸 평면도.
제8도는 제7도의 기구의 요부를 나타낸 종 단면도.
제9도는 본 발명에 관련된 제4실시예 기구의 요부를 나타낸 평면도.
제10도는 제9도의 요부를 나타낸 종 단면도.
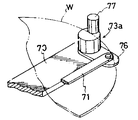
제11도는 제4실시예에서 채용된 가동 척크편의 일예를 나타낸 사시도.
제12도는 제11도의 척크편의 척크부의 변형 형태를 나타낸 사시도.
제13도는 본 발명에 관련된 제5실시예의 기구의 요부를 나타낸 종 단면도.
제14도는 본 발명에 관련된 기구가 웨이퍼 표면처리를 시행하는 진공형 장치에 적용되는 경우의 일예를 나타낸 종 단면도.
* 도면의 주요부분에 대한 부호의 설명
1 : 척크편 1a : 가동 척크편
2 : 회전판 2a : 암
3 : 슬라이더 4 : 링크
5 : 구동축 6 : 회전축
9 : 에어 실린더 9a : 출몰핀
10 : 디스크 13 : 플랜지
14 : 핀 15 : 스프링
16 : 핀 17 : 핀
18 : 에어 실린더 19, 19′ : 가이드
20, 22 : 노즐 21 : 하우징
26 : 광전 감지기 27 : 요홈
28 : 발란서 30 : 에어 실린더
30a : 출몰핀 36 : 가동 척크편
36′, 38, 38′ : 척크편 37 : 재치핀
41 : 캠 42 : 로울러
43 : 블럭 43a : 요홈
44 : 링크 45 : 슬라이더
46 : 캠 폴로워 50 : 회전판
51, 52 : 척크편 53 : 작동링크
54 : 슬라이더 55 : 발란서
70 : 회전판 70a : 암
71 : 작동링크 73, 73a : 척크편
76 : 회동암 77 : 척크부
78 : 재치부
본 발명은 웨이퍼를 각각 연속적으로 반입하여 웨이퍼를 고속으로 지지 회전시키면서 표면으로 처리액을 공급함과 동시에 수평지지에 의하여 주표면에 표면처리를 시행하는 웨이퍼 표면처리 장치에 있어서 반도체기판, 액정표시에서 적극으로 사용되는 글라스기판 또는 반도체 장치와 집적회로등을 생산하는데 사용되는 포토마스크와 같은 박판상 기판(일반적으로 웨이퍼라 함, 이후 동일)을 회전 지지하기 위한 기구에 관한 것이다.
일반적으로 이러한 장치에 있어서 웨이퍼 지지기구는 크게 두 형태로 분류된다. 하나는 소위 진공 척크형태로서 이는 웨이퍼 일측 표면에 진공흡착을 행하는 것이고 다른 하나는 세개 또는 그 이상의 척크편에 의하여 웨이퍼의 외주연을 잡는 형태이다. 전자의 것은 웨이퍼의 일측 표면만 처리를 시행하는 것이며, 후자는 양측면을 동시에 표면처리를 하고저 할시에 주로 사용하는 것이다.
이와 연관하여 일본 특허 공개 No.57-207571에는 후자 형태의 웨이퍼 지지기구가 개시되어 있다.
이 선행 기술의 기구는 웨이퍼를 지지하는 방향으로 가동 척크편을 이동시킬 수 있도록 웨이퍼 해지부재와 스프링을 배설하여 그 자체를 표면처리 장치의 처리실 내부로 직접 노출시키거나 처리실의 조건에 적응할 수 있도록 구성되어 있다. 따라서 고부식성 처리액이 표면 처리용으로 사용될시에 스프링이 부식되어 분진이 발생되고 이것이 웨이퍼에 부착되어 수율이 저하되고 또한 해지부재등의 내구성이 오히려 단축되는 요인이 되는 것이다.
본 발명은 상기한 문제등을 해결하기 위한 것으로 그 목적을 웨이퍼를 회전시키면서 표면처리를 행하는 장치에 있어서 새롭고 개량된 웨이퍼 지지기구를 제공하는데 있는 것이다.
본 발명의 다른 목적은 웨이퍼를 회전시키면서 처리하는 장치에 있어서 예컨대 웨이퍼의 표면을 처리하는 처리액에 영향을 받지 않도록 장치의 처리실 외부에서 또한 처리실로 부터 이간되게 배설된 저내식성 부재로된 웨이퍼 지지기구를 제공하는데 있는 것이다.
상기 목적을 수행하기 위하여 본 발명의 일 특징에 연관되어 웨이퍼를 회전시키면서 웨이퍼의 표면처리를 시행하는 장치에 있어서 웨이퍼 지지기구는, 장치내에 처리실을 형성하는 하우징과 하우징 내부로 돌설되는 상단부를 가진 중공체인 회전축과; 돌설된 회전축의 상단부에 수평으로 장착되고 최소한 3개의 연장된 암이 형성된 회전판 부재와; 웨이퍼의 외주연을 동시에 지지하기 위하여 각 암에 설치되고 그중 최소한 하나는 암에 연하여 수평이동되는 척크부재와; 회전축 내부에 삽설되고 웨이퍼를 지지하는 가동 척크부재를 구동시키기 위하여 회전축에 대하여 회동이 되는 구동축과; 일단은 구동축의 회전 축심에 편심되게 구동축의 상단부에 연결되고 타단은 가동 척크 부재에 연계된 링크부재와; 링크부재를 통하여 웨이퍼를 지지할 수 있도록 가동척크 부재를 구동시키는 방향으로 회전축에 대하여 구동축을 연속적으로 회동시키기 위하여 회전축과 구동축의 하단부 사이에 설치된 작동 수단과; 가동 척크 부재가 웨이퍼를 해지시키도록 작동수단에 인접되게 설치되고 구동축이 작동수단에 의하여 회동되는 방향에 역방향으로 구동축을 회동시키는 구동수단으로 구성된 것이다.
본 발명의 일 실시예에서 가동 척크부재는 암에 연하여 습동자재로 장착되고 타단은 링크부재에 연계된 슬라이더 부재에 고정되고 타 척크부재는 암에 고정되며 슬라이더부재의 무게와 동일한 무게를 가진 발란서 부재는 구동축의 회전축심에 대하여 슬라이더 부재와 대칭으로 배설되고 암에 연하여 습동자재로 장착되어 있다.
다른 실시예에서는, 발란서 부재는 링크부재의 일단에 연계되고 이 링크부재의 타단은 구동축의 상단에 다른 링크부재의 일단과 함께 연결된 것이다.
또 다른 실시예에서는 척크부재는 그 높이에 차이를 두고 형성되며 척크부재와 연관되게 모든 암의 끝단부에 의하여 형성되는 원의 내측으로 방사상으로 웨이퍼 재치핀을 설치한다.
또 다른 실시예에서는 작동수단은 회전축과 구동축의 하단부에 각각 핀을 상호 대향되게 설치하여 회전축에 대하여 구동축을 회동시키는 작동력을 부여할 수 있도록 양 핀 사이에 연속적인 인장력이 생기도록 스프링을 탄설한 것이다.
또 다른 실시예에서, 구동수단은 회전축에 대하여 구동축을 역방향으로 회동시킬 수 있도록 구동축의 하단부에 또 다른 핀을 설치하여 이 핀을 압압하기 위한 에어 실린더로 구성된 것이다.
다른 구동수단으로서 바람직한 것은, 구동축이 최하단부 하방에 캠을 배설하고, 이 캠과 계합되게 구동축의 하단부에 캠 폴로워를 설치하여 회전축이 하강하여 회전축에 대하여 구동축을 역방향으로 회동시킬 수 있도록 구성된 것이다.
다른 가동척크로서 바람직한 것은, 가동 척크부재는 암에 대하여 회동이 되게 회동부재의 일단에 고정시키고 이 회동부재의 타단은 링크부재의 일단에 연결시켜서 이에 의하여 회동부재가 링크부재를 통하여 구동축의 회동에 연동되어 회동될시, 이 회동부재에 의하여 가동 척크부재가 회동되어 웨이퍼를 지지할 수 있도록 구성된 것이다.
또 다른 가동 척크부재는 웨이퍼 재치부와 척크부가 형성된 것이다.
또한, 가동 척크부재의 척크부가 절결부로 형성된 것도 바람직스러운 것이다.
또한, 가동 척크부재의 척크부가 가동척크 부재의 몸체의 회전축심에 대하여 편심되게 재치부 상면에 형성된 본질적으로 소원주로 형성된 것도 바람직스러운 것이다.
본 발명의 다른 특징에 연관되어 웨이퍼를 회전시키면서 웨이퍼의 표면처리를 시행하는, 장치에 있어서 웨이퍼 지지기구는 장치내에 처리실을 형성하는 하우징과; 하우징 내부로 돌설된 상단부를 가진 중공체인 회전축과; 회전축의 돌설된 상단부에 수평으로 장착된 회전판 부재와; 웨이퍼의 외주연을 동시에 지지하기 위하여 회전판부재에 설치되고, 그중 최소한 한개는 회전판 부재에 연하여 방사상으로 이동자재로운 최소한 3개의 척크부재와; 회전축에 삽설되고 웨이퍼를 지지하는 가동 척크부재를 구동시키기 위하여 회전축에 대하여 회동되는 구동축과; 일단은 구동축의 회전 축심에 대하여 편심으로 구동축의 상단부에 연결되고 타단은 가동 척크부재에 연계된 링크부재와; 링크부재를 통하여 웨이퍼를 지지할 수 있도록 가동 척크부재를 구동시키는 방향으로 회전축에 대하여 구동축을 연속적으로 회동시키기 위하여 회전축과 구동축의 하단부 사이에 설치된 작동수단과; 가동척크 부재가 웨이퍼를 해지시키도록 작동수단에 인접되게 설치되고 구동축이 작동수단에 의하여 회동되는 방향에 역방향으로 구동축을 회동시키는 구동수단으로 구성된 것이다.
본 발명의 일실시예에서, 가동 척크부재는 슬라이더 부재에 고정이 되고, 이 슬라이더 부재는 회전판 부재에 연하여 방사상으로 습동자재로 장착되고 링크부재의 타단과 연계되며, 타 척크부재는 화전판 부재에 고정되며, 슬라이더 부재의 무게와 동일한 무게를 가진 발란서부재는 구동축의 회전축심에 대하여 슬라이더부재와 대칭으로 배설되고 회전판 부재에 연하여 방사상으로 습동자재로 장착되어 있다.
다른 실시예에서는 발란서 부재는 링크부재의 일단에 연계되고 이 링크부재의 타당은 구동축의 회전축심에 편심되게 구동축의 상단부에 연결된 것이다.
또 다른 실시예에서는 가동 척크부재는 회전판 부재에 형성된 통공을 통하여 간격을 가지면서 수직관통되어 슬라이더 부재에 고정되고 발란서 부재는 회전판 부재에형성된 다른 통공을 통하여 간격을 가지면서 수직관통하는 핀을 구비하고 있다.
본 발명의 또 다른 특징에 연관되어 웨이퍼를 회전시키면서 웨이퍼의 표면 처리를 시행하는 장치에 있어서 웨이퍼 지지기구는 장치내에 처리실을 형성하는 하우징과; 하우징 내부로 돌설되는 상단부를 가진 중공체인 회전축과; 회전축의 돌설된 상단부에 수평으로 장착된 회전판부재와; 웨이퍼의 외주연을 동시에 지지하기 위하여 회전축의 회전 축심에 대하여 대칭으로 배설되고, 그중 최소한 한개는 회전판 부재에 연하여 방사상으로 습동자재로 장착된 척크부재와; 회전축 내부에 삽설되고 가동 척크부재를 작동시키기 위하여 회전축에 대하여 축심으로 승강이동되는 구동축과; 구동축의 상단부에 설치된 캠 부재와; 캠 부재와 계합되는 캠 폴로워가 일단부에 형성되고 타단부는 척크부재에 고정되며, 캠 부재와 계합된 구동축이 회전축에 대하여 축심상으로 승강 운동에 따라서 캠 폴로워가 연동될시 척크부재와 일체로 회전판 부재에 연하여 수동 이동되는 링크부재와; 척크부재가 웨이퍼를 계속적으로 지지할 수 있도록 회전축에 대하여 구동축을 계지상태를 유지시키기 위한 유지수단과; 구동축이 회전축에 대하여 구동축이 축심상으로 승강 이동될시에 링크부재를 통하여 척크부재가 웨이퍼를 해지시킬 수 있도록 구동축의 하단부에 설치된 구동수단으로 구성된 것이다.
본 발명의 일 실시예에서는 유지수단은 회전축과 구동축의 하단부 사이에 회전축의 축심상으로 상호 대향되게 구동축에게 인장력을 주기 위하여 탄설된 스프링으로 구성된 것이다.
다른 실시예에서는 구동수단은 구동축의 하단부의 하향되게 돌출된 핀으로 구성된 것이다.
또 다른 실시예에서는 2개의 대향되는 척크부재는 회전판 부재에 연하여 방사상으로 장착된 2개의 슬라이더 부재에 고정된 것이다.
따라서 본 발명에 의하면 웨이퍼를 회전시키면서 웨이퍼의 표면처리를 시행하는 장치의 처리실로 부터 외곽으로 이간되게 저 내식성부재를 배설할 수 있어서 웨이퍼의 표면으로 분출되는 예컨대 처리액에 의하여 영향을 받지 않게 되는 것이다.
이에 따라 종래에 분진이 발생되어 피처리 웨이퍼에 부착되어 생산수율이 감소되던 것을 본 발명의 웨이퍼 지지기구는 분진이 발생이 되지 않게 되어서 상기한 결함을 해소시켜서 결과적으로 지지기구 그 자체의 내식성이 대폭적으로 향상시킬 수가 있게 되는 것이다.
본 발명의 전술한 목적과 또 다른 목적과 장점은 이하에서 첨부도면을 참조하여 상세히 설명하는 것에 의하여 더욱 분명해 질 것이다.
이하, 첨부도면을 참조하여 본 발명의 최량의 실시예를 설명한다.
제1도는 본 발명의 일 특징에 연관되어 웨이퍼를 회전시키면서 웨이퍼의 표면처리를 시행하는 장치에 있어서의 웨이퍼 지지기구의 제1실시예를 나타낸 것이며 제2도는 제1도의 웨이퍼 지지기구의 평면도이다.
이 기구는 웨이퍼의 표면처리를 시행하는 장치에 있어서, 처리실을 형성하는 하우징(21)과; 하우징(21) 내부로 일단부가 돌설되어 회전되는 회전축(6)과; 회전축(6)의 돌출단부 부근에 설치된 회전판(2)과; 피처리 웨이퍼(W)의 외주연을 동시에 지지하기 위한 회전판(2)의 회전축에 대하여 대칭적으로 회전판(2)상에 배열되고, 2쌍의 중에서 대칭되는 1쌍이 이동되게 구성된 4개의 척크편(1)과; 가동 척크편(1a)을 웨이퍼를 지지하는 방향으로 이동시키도록 부세력을 행사하기 위한 스프링(15)과; 가동 척크편(1a)을 스프링(15)에 의한 부세력에 반대로 웨이퍼를 해지하는 방향으로 가동 척크(1a)을 이동시키기 위한 에어 실린더(30)로 구성된 것이다.
회전판(2)은 회전축(6)의 돌출단부에 고정에 회전두부(2A)에 볼트(24)에 의하여 수평으로 착탈자재로 고정되고 회전판(2) 대신에 웨이퍼 크기에 적합한 것으로 대용하여도 되는 것이다. 또한 회전판(2)은 방사상으로 연장된 4개의 암(2a)이 형성되어 있다. 2개의 암(2a)의 끝단부에 2개의 척크편(1)을 각각 고정시키고 암(2a)에 연하여 수평으로 습동자재로운 슬라이더(3)상에 슬라이더(3)와 함께 이동가능한 2개의 척크편(1a)을 고정시킨다. 또한 예시부호 28은 발란서를 나타낸 것이며 이는 슬라이더(3)의 형상과 무게와 동일한 것으로 암(2a)에 연하여 습동되도록 회전축심에 대하여 슬라이더(3)와 대칭으로 배설되어 있고 또한 이 발란서(28)는 가동 척크편 (1a)을 작동시키는 후술하는 작동 링크(4)를 통하여 슬라이더(3)에 연결되어 있다.
회전축(6)은 중공체로서 이 내측에 회전축(6)에 대하여 회전되어 가동 척크편(1a)을 작동시키는 구동축(5)이 삽입되어 있다. 회전축(6)은 베어링(25)에 의하여 베이스(31)에 회전자재로 지지되어 있으며 베이스(31)상에 설치된 구동모터(12)로부터 벨트(11)와 폴리(7)를 통하여 회전토록 되어 있다.
회전축(6)은 플렌지(8)에 의하여 괘지되며 회전축(6)의 괘지상태를 에어 실린더(9)는 디스크(10)와 광전감지기(26)에 의하여 검출을 받게 된다. 즉 디스크(10)는 괘지 위치를 식별하기 위하여 절결부를 형성하여 회전축(6)의 하단부에 고정되어 있으며 광전 감지기(26)는 절결부를 검출한다.
한편 플렌지(8)는 회전축(6)에 고정되고 에어 실린더(9)는 플랜지(8)에 대응되게 베이스(31)에 설치되어 있다. 회전축(6)의 괘지는 플랜지(8)의 외주연에 형성된 요홈에 에어 실린더(9)의 출몰 롯드(9a)의 선단의 계합에 의하여 수행된다.
대향되는 슬라이더(3)와 발란서(28)는 2개의 링크(4)에 의하여 연계되고 이는 링크(4)의 각 일단부에 상호 연결되고 또한 회전축(6)의 회전축심에 대하여 편심되게 구동축(5)의 상단부에 연결되어 있으며 한편 링크(4)의 타단부에는 슬라이더(3)와 발란서(28)가 각각 연결되어 있다. 따라서 회전축(6)에 대하여 구동축(5)의 회동에 의하여 가동 척크편 (1a)의 작동이 되어진다. 즉 링크(4)를 통하여 슬라이더(3)와 함께 암(2a)에 연하여 가동 척크편(1a)의 습동이 이루어지는 것이다.
양 축(5)(6)은 스프링(15)에 의하여 척크편(1)이 웨이퍼(W)를 동시에 지지할 수 있는 방향으로 상대적인 회동을 하도록 연속적으로 작동력을 부여받게 된다. 즉 핀(14)과 핀(17)이 상호 잡아당길 수 있는 부세력을 주기 위하여 회전축(6)의 하단부에 설치된 플랜지(13)의 하방에서 돌설된 핀(14)과 구동축(5)의 하단부에 설치된 핀(17) 사이에 스프링(15)으로 압축 부세력이 생기도록 연결한다.
스프링(15)에 의한 부세력은 핀 (14)과 핀(17)사이의 거리를 변경하면 회전축(6)에 대하여 플랜지(13)의 설치위치가 변경되어서 조절할 수 있는 것이다. 구동축(5)의 하단부에 또 하나의 핀(16)을 설치하여 척크편(1)에 웨이퍼(W)가 장착이 되지 않을시에 핀(16)이 핀(14)에 당접하는 것에 의하여 회전축(6)에 대하여 구동축(5)의 회전이 정지되며, 필요하다면 웨이퍼(W)를 장착시키기 위한 판단을 하기 위하여 핀(14)와 핀(16)이 당접 여부를 검출하기 위한 적절한 검출수단을 설치하여도 되는 것이다.
그외 절결부가 형성된 디스크를 구동축(5)의 하단부에 추가적으로 설치하여, (a) 가동 척크편(1a)이 웨이퍼의 해지 위치에 있는지 여부, (b) 웨이퍼가 척크편(1)에 의하여 장착되어 있는지 여부, (c) 가동 척크편(1a)이 어떠한 웨이퍼를 장착하고 있지 않아도 웨이퍼 지지위치에 있는지 여부등의 판단을 하기 위하여 절결부가 광전 감지기에 의하여 검출할 수 있도록 배열하여도 되는 것이다. 따라서 (a)의 경우에는 웨이퍼를 장치 내부로/외부로 반입 또는 반출을 수행할 수 있으며, (b)의 경우에는 웨이퍼를 회전시킬 수 있으며, (c)의 경우에 회전을 정지할 수 있는 등의 각각 작동을 확실하게 수행할 수 있는 것이다. 따라서 웨이퍼가 안정되게 확실하게 장착되지 않으면 상기와 같이 회전이 되지 않게 된다.
에어 실린더(30)는 스프링(15)의 일단이 연결된 핀(17)과 대응하는 출몰 롯드(30a)를 가지고 있다. 스프링(15)에 의하여 핀(17)에 작용하는 부세력에 대하여 제1도에서 가상선으로 나타낸 위치로 피스톤(30)이 핀(17)을 압압하는 것에 의하여 구동축(5)이 반시계 방향으로 회동될시에 슬라이더(3)상에 설치된 가동 척크편(1a)은 구동축(5)의 회동에 연동되어 링크(4)를 통하여 슬라이더(3)과 함께 제2도에서 가상선으로 나타낸 웨이퍼 해지위치로 이동된다.
지지기구를 지지하는 베이스(31)는 한쌍의 가이드(19)(19′)에 연하여 승강되고 에어 실린더(18)에 의하여 승강구동된다. 실린더(18)가 베이스(31)를 상향으로 상승시켜서 하우징(21)의 상면보다 더 높은 위치인 제1도에서 가상선으로 나타낸 위치로 척크편(1)이 이동되면 웨이퍼의 교체가 가능하게 되는 것이다.
예시 부호 23은 웨이퍼 이송장치(도시안됨)의 이송암이고, 20은 웨이퍼의 저면으로 처리액을 분출하기 위한 노즐로서 하우징(21) 내벽에 부착되어 있으며, 22는 또 다른 처리액 분출용 노즐로서 회전두부(2A) 상면에 수평으로 이동되게 현수되어 있다. 양 노즐(20), (22)은 독립적으로 처리액 공급수단(도시안됨)에 연결되어 있으며, 이에 따라 소정 처리액을 웨이퍼의 상,하면으로 분출된다. 그외, 필요하다면 처리액 공급통로를 구동축(5)의 내부를 통하여 삽입설치하여 이 공급통로의 상부 끝단에 노즐을 설치하여 웨이퍼의 하면으로 처리액을 분출할 수 있도록 배설하여도 되는 것이다.
이하, 본 발명의 연관된 웨이퍼 지지기구의 작용을 상세히 설명한다.
소정의 위치(도시안됨)에서 사전에 정열된 웨이퍼(W)는 암(23)에 의하여 하우징(21)의 상부로 이송된다. 한편, 회전축(6)은 디스크(10)와 광전 감지기(26)에 의하여 대략적인 위치가 결정된 후에 정지되고 그리고 실린더(9)의 출몰롯드(9a)의 선단이 플랜지(8)의 요홈에 삽입하는 것에 의하여 정확하게 위치가 결정 고정된다.
그후 에어 실린더(30)는 핀(17)을 인장하는 작용력에 대하여 반대방향으로 핀(17)을 압압하여 회전축(6)에 대하여 구동축(5)을 소정범위로 회동시키게 되며, 이 결과로서 슬라이더(3)는 제2도에서 나타낸 실선으로 나타낸 위치에서 가상선으로 나타낸 위치로 습동되어 타 척크편(1)보다 암(23)에 근접되는 2개의 가공 척크편(1a) 사이가 더욱 확대되어 진다.
다음 척크편(1)을 제1도에서 실선으로 나타낸 위치에서 가상선으로 나타낸 위치 만큼 높은 위치가 될 때까지 상승시키며, 즉 척크편(1)에 형성된 요홈(27)이 암(23)에 의하여 지지된 웨이퍼의 높이와 동일한 높이가 될때까지 베이스(31)는 실린더(18)에 의하여 상승된다.
그후, 실린더(30)는 후퇴하여 양축(5), (6)의 핀(14), (17)을 상호 인장시켰던 스프링(15)에 의하여 작용되던 부세력이 자유상태로 되어서 슬라이더(3)는 제2도에서 나타낸 가상선의 위치에서 실선의 위치로 습동되어 웨이퍼의 외주연이 요홈(27)에 삽착하여 척크편(1)이 웨이퍼를 지지하게 된다. 이때에 핀(14)에 대하여 핀(16)의 당접을 검출하기 위하여 감지기(도시안됨)가 설치된 경우에는 운전자는 척크편(1)에 웨이퍼가 장착되는지 여부가 확인할 수가 있는 것이다.
따라서, 암(23)과 웨이퍼의 저면과의 사이에 공간을 형성하기 위하여 척크편(1)은 에어 실린더(18)에 의하여 약간 더 상승시켜서 웨이퍼의 저면 하방으로 부터 암(23)이 이탈될 수 있도록 한다. 그런후, 실린더(18)는 베이스(31)를 하강시켜서 웨이퍼가 하우징(21)에 수장되도록 제1도에서 가상선으로 나타낸 위치로 부터 실선으로 나타낸 위치로 하강된다.
다음 실린더(9)의 출몰롯드(9a)는 플랜지(8)의 요홈으로 부터 후퇴하여 해지되어서 회전축(6)은 회전할 수 있게 되어 모터(12)를 구동시켜서 회전축(6)를 구동시키게 된다.
이때에 구동축(5)과 회전축(6)은 스프링(15)에 의하여 연결되어 있기 때문에 구동축(5)은 회전축(6)과 함께 회전되어 웨이퍼(W)는 척크편(1)에 의하여 수평으로 지지되면서 회전하게 되는 것이다.
그리고 엣칭액, 현상액, 린스액등과 같은 소정의 표면처리액을 웨이퍼의 중심 상방에서 이동되는 노즐(22)로 부터 웨이퍼의 상면으로 분출하여 웨이퍼의 표면처리를 시행하게 되는 것이다. 한편, 웨이퍼의 저면을 동시에 처리를 시행하고저 할시에는 하우징(21) 내벽에 부착된 노즐(20)로 부터 웨이퍼의 저면으로 처리액을 분출하는 것에 의하여 시행할 수 있다.
슬라이더(3)에 작용하는 원심력은 회전축(6)의 축심에 대하여 슬라이더(3)와 대칭으로 배열된 발란서(28)의 원심력과 평형이 되기 때문에 슬라이더(3)에 가해지는 부하는 회전하는 동안에 변동이 없게 되어서 이에 따라 웨이퍼는 안정성이 있는 회전을 이루게 되는 것이다. 전술한 바와 같이 소정의 웨이퍼의 표면처리가 완성된 후에, 디스크(10)의 절결부와 광전감지기(26)가 상호 대응되어서 회전축(6)은 정지되고, 이 회전축(6)의 정확한 위치결정은 플랜지(8)의 요홈으로 실린더(9)의 출몰롯드(9a)의 선단을 계합시킬 수 있도록 실린더(9)를 작동시키는 것에 의하여 행해진다.
다음, 실린더(18)가 웨이퍼(W)를 상향으로 상승시키고, 암(23)이 웨이퍼의 하방측으로 이동되며, 이어서 실린더(30)가 작동되어 암(23)측으로 위치된 가동 척크편(1a) 사이의 거리를 확대시켜서 웨이퍼(W)가 암(23) 상면에 안착되어진다. 이어서, 웨이퍼(W)는 암(23)에 의하여 장치외로 반출되어진다.
따라서 웨이퍼의 한장 한장 암(23)에 의하여 장치내로 연속적으로 반송됨과 동시에 이어서 전술한 바와 같은 동일한 방법을 반복하는 것에 의하여 표면처리를 시행하게 되는 것이다.
제3도는 본 발명에 연관되는 웨이퍼 지지기구의 제2실시예를 나타낸 종단면도이고, 제4도는 제3도의 지지기구의 평면도이며, 제1도 및 제2도에서 나타낸 지지기구의 대응되는 요소는 동일 부호를 사용한다.
가상선으로 나타낸 부호 35, 35′는 웨이퍼 이송용 한쌍의 엔드레스 벨트를 나타내며, 하우징(21) 내부에 장착된 폴리(도시안됨)사이에 장설되어 있다. 한편, 하우징(21)은 벨트(35), (35′)에 대응되는 위치에 웨이퍼 반입 및 반출용 입구 및 출구(도시안됨)를 구비하고 있다. 입구 및 출구에는 각각 개폐문이 장착되어 있다.
다음에서 전술한 제1실시예와 제2실시예의 차이를 기술한다.
4개의 척크편(36)(36′)(38)(38′)은 제1실시예의 경우와 같이 배설되지만, 이중에서 척크편(36)만 슬라이더(3)와 함께 이동되는 방식으로 슬라이더(3)상에 입설되고 나머지 3개의 척크편(36′)(38)(38′)는 회전판(2)의 암(2a)상에 고정되어 있다. 척크편(36)(36′)는 하우징(21)으로 웨이퍼를 반입하는 상향 방향(제4도에서 화살표 B로 도시됨)에 배설되며, 하향방향에 배설된 척크편(38)(38′)보다 높이 낮게하여 척크편(38)(38′)이 웨이퍼의 위치결정 핀의 역할도 겸하도록 한다. 또한 4개의 웨이퍼 재치핀(37)을 입설하되 이는 4개의 척크편(36)(36′)(38)(38′)에 연관되게 4개의 암(2a)의 끝단부에 의하여 형성되는 원의 내측으로 방사상으로 배설되고 그 높이는 척크편(36)(36′)보다 낮게 한다. 4개의 재치핀(37)중에서 재치핀(37a) 한개는 슬라이더(3)에 고정된다. 따라서 웨이퍼(W)는 긴 척크편(38)(38′)에 대하여 당접이 되어 위치가 결정될때까지 벨트(35)(35′)에 의하여 높이가 짧은 척크편(36)(36′)의 상방으로 수평 반입된다. 그리고 에어 실린더(18)를 작동시켜 제3도에서 가상선으로 표시된 위치로 척크편(36)(36′)(38)(38′)과 재치핀(37)을 상승시키면, 웨이퍼는 벨트(35)(35′)으로 부터 재치핀(37) 상면으로 재치되어 진다. 이어서, 후술하는 웨이퍼 해지기구가 척크편(36(36′)(38)(38′)이 웨이퍼를 함께 잡을 수 있도록 비작동 위치로 되어진다.
즉, 제5도 및 제6도에 나타낸 바와 같이 구동축(5)의 핀(17)에 로울러(42)를 회동자재로 설치하고 회전축(6)이 하강시에 로울러(42)가 회동자재로 접촉할 수 있는 캠(41)을 구동축(5)의 최하단부에의 하방에 설치한다.
따라서 회전축(6)이 하강하면 로울러(42)는 회전축(6)에 대하여 구동축(5)을 스프링(15)에 의한 부세력에 반대방향으로 회동시키게 되어서 슬라이더(3)는 습동되어 제4도에서 나타낸 바와 같이 척크편(36)과 척크편(38′) 사이의 거리를 확대시키게 된다. 역으로, 회전축(6)이 제5도에서 실선으로 나타낸 바와 같이 상승시에는 로울러(42)는 캠(41)으로 부터 이간되어 스프링(15)에 의한 부세력의 작동으로 슬라이더(3)는 링크(4)를 통하여 구동축(5)의 회전축심을 향하여 수평 습동하여 원위치로 복귀되어 척크편(36)(38′)는 웨이퍼를 지지하게 되는 것이다.
상기 2개의 실시예에서는 회전판(2)이 4개의 암(2a)을 형성하고 있지만, 최소한 3개의 암을 등간격으로 형성하는 구조로 하여도 되는 것이다.
제7도는 본 발명에 연관된 기구의 제3의 실시예를 나타낸 평면도이며, 제8도는 제7도의 기구의 요부를 나타내는 종 단면도이다.
이하에서 제3실시예와 제1실시예의 차이 부분을 설명한다.
제1실시예의 경우와 상이한 것은 회전판(50)에 암이 형성되어 있지 않은 것이며, 한개의 척크편(51)이 슬라이더(54)상에 입설되어 있으며, 3개의 척크편(52)이 회전판(50)상에 고정되어 있다. 척크편(51)은 회전판(50)에 형성된 통공(63)을 통하여 간격을 가지면서 수직관통하여 슬라이더(54)상에 고정되어 있으며, 이 슬라이더(54)는 웨이퍼를 지지할 수 있도록 슬라이더(54)와 함께 이동되게 회전판(50)에 연하여 방사상으로 습동자재로 장착되어 있다.
슬라이더(54)는 척크편(51) 작동링크(53)를 통하여 구동축(5)의 상단부에 연계되어 있다. 부호 55는 구동축(5)의 회전 축심에 대하여 슬라이더(54)와 대칭으로 배설된 발란서이며, 또한 회전판(50)의 통공(64)를 통하여 간격을 가지면서 수직 관통된 핀(59)을 구비하고 있다. 발란서(55)는 링크(53′)를 통하여 구동축(5)의 상단부에 전술한 것과 동일하게 연계되어 있다.
따라서 회전중에 슬라이더(54)와 발란서(55) 가해지는 원심력은 평형을 이루게 되는 것이다.
또한 척크편(51)과 대향되는 하나의 척크편(52)은 발란서(55)에 고정되어 발란서(55)와 함께 이동하도록 하여도 되는 것이다.
제9도는 본 발명의 제4실시예에 연관되는 요부를 나타낸 평면도이며 제10도는 제9도의 요부를 나타내는 종 단면도이고, 제11도는 제4실시예에서 사용되는 가동 척크편(73a)의 일예를 나타낸 사시도이다.
이하에서, 제1실시예와 제4실시예의 차이를 기술한다.
회전판(70)은 6개의 암(70a)이 수평 방사상으로 연장 형성되어 있으며, 이의 각 끝단부에 6개의 척크편(73)이 각각 입설되어 있다.
이 6개의 척크편(73)중에서 3개의 척크편(73a)은 가동적이고, 나머지는 암(70a )의 끝단부에 고정되어 있다. 고정 및 가동 척크편(73)(73a)은 전체 암(70a)의 끝단부에 의하여 형성되는 원주상으로 교번적으로 배설되어 있다.
가동 척크편(73a)의 상단부는 웨이퍼를 지지하기에 적합한 형상으로 되어 있으며, 이의 하단부는 회동암(76)에 고정되어 있어서 이에 따라 가동 척크편(73a)은 암(70a)에 대하여 회동토록 되어 있다.
회동암(76)은 가동 척크편(73a)을 작동시키는 링크(71)의 일단에 연결되고, 이 링크(71)의 타단은 가동 척크편(73a)을 작동시키는 구동축(5)에 고정된 디스크(74)에 연결되어 있어서 회동암(76)은 링크(71)를 통하여 구동축(5)에 의하여 회동된다.
따라서, 제9도에서 가상선으로 나타낸 바와 같이 링크(71)를 통하여 구동축(5)의 회전에 연동되어 암(76)이 회동될시에 회동암(76)에 의하여 가동 척크편(73a)이 웨이퍼를 지지할 수 있도록 암(70a)에 대하여 그 상면에서 회동토록 되어 있다. 제11도에 실선으로 나타낸 바와 같이 가동 척크편(73a)이 상단부에는 웨이퍼를 지지하기 위한 단부로 형성되는 웨이퍼 재치부(78)와 척크부(77)가 형성되어 있으며, 이에 따라 웨이퍼는 재치부(78)에 재치되고, 척크부(77)에 의하여 지지된다.
제12도는 제11도의 가동 척크편(73a)의 척크편(77)의 변형된 형태를 나타낸 것으로 이 척크부(77)는 가동 척크편(73a)의 몸체의 회전축에 대하여 편심으로 설치된 소원주로 형성되어 있다.
그외, 본 실시예에서 스프링(15)의 작용력은 제1실시예의 작용력에 대하여 역방향으로 작용되지만, 제11도 및 제12도의 가동 척크편(73a)을 사용시에는 스프링(15)에 의한 작용력은 양방향에 대하여 자유 상태로 놓아도 되는 것이다.
제13도는 본 발명의 제5실시예에 연관된 기구의 요부를 나타낸 종 단면도이다. 본 실시예에서 구동축(5)은 회전축(6)의 축상으로 회전축(6)에 연관되어 습동자재로 삽입되어 있으며, 구동축(5)에 대하여 회전판(2)상에 대칭으로 배설된 4개의 척크편(1)중에서, 2개의 대향되는 척크편(1a)은 각각 슬라이더(45)상에 설치되며, 이 슬라이더(45)는 회전중에 양 척크편(1a)에 가해지는 원심력과 평형이 되도록 회전판(2)에 연하여 방사상으로 습동자재로 장착되어 있다.
가동 척크편(1a)은 링크(44)의 일단에 일체로 고정되고 링크(44)의 타단은 캠 홈(43a)에 계합되는 캠 폴로워(46)가 설치되어 있다. 구동축(5) 상단부에 요홈(43a)이 형성된 블럭(43)이 고정되어 있다. 구동축(5)이 습동 상승되면, 구동축(5)의 상승이동에 연동되어 캠 폴로워(46)은 요홈(43a)에 연하여 이동되어서 링크(44)가 가이드(90)에 연하여 수평이동되어 가동 척크편(1a)은 웨이퍼를 해지하게 되는 것이다. 즉, 회전축(6)이 하강할시에만 구동축(5)의 최하단 부위에 설치된 핀(47)에 의하여 스프링(15)의 부세력에 반대로 회전축(6)에 대하여 상승되어져서 제13도에서 실선으로 나타낸 바와 같이 가동 척크편(1a)사이의 거리는 확개되어 진다. 한편, 회전축(6)이 상승되면 가동 척크편(1a)은 웨이퍼를 지지하기 위하여 제13도에서 가상선에 의하여 나타낸 바와 같이 스프링(15)의 부세력에 의하여 상호 근접되어진다.
제14도는 진공형태의 웨이퍼 표면처리 장치에 적용되는 웨이퍼 지지기구의 경우에 일예를 나타낸 종단면도로서 여기에 제1도의 기구에 대응되는 부위는 동일 부호를 사용한다.
부호 84는 장치의 케이싱을 나타낸 것이며, 부호 83은 케이싱(84)을 밀폐하기 위하여 설치된 카버이며, 부호 85는 진공 흡입하기 위한 배출관이고, 부호 80은 케이싱(84)저면과 회전축(6)에 장착된 부싱(86)과의 사이에 밀봉을 시키는 신축성 씨일인 벨로즈이다. 실린더(18)가 승강이동되어서 벨로즈(80)도 상하 이동되지만 케이싱(84)의 기밀은 벨로즈(80)의 신축운동에 의하여 유지할 수가 있는 것이다.
또한 0링과 같은 씨일 부재(81)는 구동축(5)과 회전축(6) 사이에 삽착되어 있다.
따라서 상기와 같은 구조는 본 발명에 연관된 웨이퍼 지지기구를 또한 진공 형태의 표면처리 장치에서도 적용 가능하게 되는 것이다.
전술한 본 발명의 실시예는 다양한 변형과 유형을 본 발명의 기술사상과 다음의 청구범위로 부터 일탈됨이 없이 만들 수 있음은 자명한 것이다.
Claims (19)
- 웨이퍼를 회전시키면서 웨이퍼의 표면처리를 시행하는 장치에 있어서, 상기 장치내에 처리실을 형성하는 하우징(21)과; 상기 하우징(21) 내부로 돌설된 상단부를 가진 중공체인 회전축(6)과; 상기 회전축(6)에 돌출되게 설치된 상단부에 수평으로 장착되고, 최소한 3개의 암(2a, 70a)이 방사상으로 연장 형성된 회전판 부재(2, 70)와; 웨이퍼의 외주연부를 동시에 지지하기 위하여 상기 각각의 암(2a, 70a) 상면에 설치되고, 그중 최소한 한개는 상기 암(2a, 70a)에 연하여 수평으로 이동자재로 설치된 척크 부재(1, 1a, 36, 36′ 38, 38′, 73, 73a)와; 상기 회전축(6)내부에 삽설되고 상기 척크부재(1a, 36, 73a)가 웨이퍼를 지지할 수 있도록 작동시키기 위하여 상기 회전축(6)에 대하여 회동되게 설치된 구동축(5)과; 일단은 상기 구동축(5)의 회전축심에 대하여 편심되게 상기 구동축(5)축의 상단부에 연결되고 타단은 상기 가동 척크부재(1a, 36, 73a)에 연계된 링크부재(4, 71)와; 상기 링크 부재를 통하여 상기 가동 척크부재가 웨이퍼를 지지할 수 있는 방향으로 상기 회전축(6)에 대하여 상기 구동축(5)에게 항시 회동력을 부여하기 위하여 상기 회전축(6)과, 상기 구동축(5)의 하단부 사이에 연계 설치된 작동수단과; 상기 가동척크부재(1a, 36, 73a)가 웨이퍼를 해지시킬 수 있도록 상기 작동 수단에 인접되게 배설되고 상기 구동축(5)이 상기 작동수단에 의하여 회동되는 상기 방향에 역방향으로 상기 구동축(5)을 회동시키는 구동수단으로 구성된 웨이퍼 지지기구.
- 제1항에 있어서, 상기 가동 척크부재(1a, 36)는 상기 암(2a)에 연하여 습동자재로 장착되고 상기 링크부재(4)의 타단과 연계된 슬라이더 부재(3)에 고정되고, 타 척크부재(1, 36′, 38, 38′)는 상기 암(2a)에 고정되며, 또한 상기 슬라이더부재(3)와 동일한 무게의 발란서 부재(28)는 상기 구동축(5)의 회전축심에 대하여 상기 슬라이더부재(3)와 대칭으로 배설되고 상기 암(2a)에 연하여 습동자재로 장착하여 구성된 웨이퍼 지지기구.
- 제2항에 있어서, 상기 발란서 부재(28)는 다른 링크부재(4)의 일단에 연계되고 이 링크부재(4)의 타단은 상기 구동축(5)의 상기 상단부에 상기 또 다른 링크 부재(4)의 일단과 함께 연결하여 구성된 웨이퍼 지지기구.
- 제1항에 있어서, 상기 척크부재(36, 36′, 38, 38′)는 높이에 차이를 두고 형성되며 상기 척크부재(36, 36′, 38, 38′)에 연관되게 상기 전체 암(2a)의 끝단에 의하여 형성되는 원의 내측에 방사상으로 다수의 웨이퍼 재치핀(37, 37a)을 설치하여 구성된 웨이퍼 지지기구.
- 제1항에 있어서, 상기 작동수단은 상기 회전축(6)과; 상기 구동축(5)의 하단부 사이에 핀(14, 17)을 설치하여 상기 회전축(6)에 대하여 상기 구동축(5)이 회동력을 부여받도록 상호 대향되는 상기 양 핀(14, 17)사이에 항시 인장력을 받도록 연결된 스프링(15)으로 구성된 웨이퍼 지지기구.
- 제1항에 있어서, 상기 구동수단은 상기 역방향으로 상기 회전축(6)에 대하여 상기 구동축(5)을 회동시킬 수 있도록 상기 구동축(5)의 상기 하단부에 설치된 핀( 17)을 압압하기 위한 에어 실린더(30)로 구성된 웨이퍼 지지기구.
- 제1항에 있어서, 상기 구동수단은 회전축(6)이 하강시에 상기 구동축(5)을 상기 회전축(6)에 대하여 상기 역방향으로 회동시킬 수 있도록 상기 구동축(5)의 상기 하단부에 형성된 캠 플로워(42)와 계합이 되게 상기 구동축(5)의 최하단부 하방으로 배설된 캠 부재(41)로 구성된 웨이퍼 지지기구.
- 제1항에 있어서, 상기 가동 척크부재는 상기 암(70a)에 대하여 회동되고 상기 링크부재(71)의 타단과 연결된 회동부재(76)에 고정되고 이에 의하여 상기 회동부재(76)가 상기 링크부재(71)를 통하여 상기 구동축(5)의 회동에 연동되어 회동시에 상기 회동부재(76)에 의하여 가동 척크 부재(73a)가 회동되어 웨이퍼를 지지하도록 구성된 웨이퍼 지지기구.
- 제7항에 있어서, 상기 가동 척크부재(73a)는 웨이퍼 재치부(78)와 척크부(77)로 구성된 웨이퍼 지지기구.
- 제8항에 있어서, 상기 가동척크부재(73a)의 척크부(77)는 절결부로 구성된 웨이퍼 지지기구.
- 제8항에 있어서, 상기 가동척크부재(73a)의 척크부(77)는 상기 가동 척크부재(73a)의 몸체의 회전축에 편심되게 상기 재치부(78)에 형성된 실질적으로 소원주로 구성된 웨이퍼 지지기구.
- 웨이퍼를 회전시키면서 웨이퍼의 표면처리를 시행하는 장치에 있어서, 상기 장치내에 처리실을 형성하는 하우징(21)과; 상기 하우징(21)내부로 돌설된 상단부를 가진 중공체인 회전축(6)과 상기 회전축(6)의 돌설된 상단부에 수평으로 장착된 회전판 부재(50)와; 웨이퍼의 외주연부를 동시에 지지하기 위하여 상기 회전판 부재(50)에 설치되고, 그중 최소한 한개는 상기 회전판 부재(50)에 연하여 방사상으로 이동자재로 설치된 최소한 3개의 척크 부재(51, 52)와; 상기 회전축(6) 내부에 삽설되고 가동 척크 부재(51)가 웨이퍼를 지지할 수 있도록 작동시키기 위하여 상기 회전축(6)에 대하여 회동되게 설치된 구동축(5)과; 일단은 상기 구동축(5)의 회전축심에 대하여 편심되게 상기 구동축(5)의 상단부에 연결되고 타단은 상기 가동 척크부재(51)에 연계된 링크 부재(53, 53′)와; 상기 링크부재(53, 53′)를 통하여 상기 가동 척크부재(51)가 웨이퍼를 지지할 수 있는 방향으로 상기 회전축(6)에 대하여 상기 구동축(5)에 항시 회동력을 부여하기 위하여 상기 회전축(6)과; 상기 구동축(5)의 하단부 사이에 연계 설치된 작동수단과 상기 가동 척크부재(51)가 웨이퍼를 해지시킬 수 있도록 상기 작동수단에 인접되게 배설되고 상기 구동축(5)이 상기 작동수단에 의하여 회동되는 상기 방향에 역방향으로 상기 구동축(5)을 회동시키는 구동수단으로 구성된 웨이퍼 지지기구.
- 제12항에 있어서, 상기 가동 척크 부재(51)는 상기 회전판 부재(50)에 연하여 방사상으로 습동자재로 장착되고 상기 링크부재(53)의 타단과 연계된 슬라이더 부재(54)에 고정되고, 타 척크부재(52)는 상기 회전판부재(50)에 고정되며, 또한 상기 슬라이더 부재(54)와 동일한 무게의 발란서 부재(55)는 상기 구동축(5)의 회전축심에 대하여 상기 슬라이더 부재(54)와 대칭으로 배설되고 상기 회전판 부재(50)에 연하여 방사상으로 습동자재로 구성된 웨이퍼 지지기구.
- 제13항에 있어서, 상기 발란서 부재(55)는 다른 링크 부재(53′)에 일단에 연계되고 이 링크 부재(53′)은 타단은 상기 구동축(5)의 상기 회전축심에 편심되게 상기 구동축(5)의 상단부에 연결하여 구성된 웨이퍼 지지기구.
- 제13항에 있어서, 상기 가동 척크부재(51)는 상기 회전판 부재(50)에 형성된 통공(63)을 통하여 간격을 가지면서 수직 관통되어 상기 슬라이더부재(54)에 고정되고, 상기 발란서 부재(55)는 상기 회전판 부재(50)에 형성된 다른 통공(64)을 통하여 간격을 가지면서 수직 관통된 핀(59)을 구비하여서 구성된 웨이퍼 지지기구.
- 웨이퍼를 회전시키면서 웨이퍼의 표면처리를 시행하는 장치에 있어서, 상기 장치내에 처리실을 형성하는 하우징(21)과; 상기 하우징(21) 내부로 돌설된 상단부를 가진 중공체인 회전축(6)과; 상기 회전축(6)의 돌설된 상단부에 수평으로 장착된 회전판 부재(2)와; 웨이퍼의 외주연부를 동시에 지지하기 위하여 상기 회전축(6)의 회전축심에 대하여 대칭으로 배설되고, 그중 최소한 한개는 상기 회전판 부재(2)에 연하여 방사상으로 습동자재로 설치된 척크 부재(1, 1a)와; 상기 회전축(6) 내부에 삽설되고 상기 척크 부재(1, 1a)를 작동시키기 위하여 상기 회전축(6)에 대하여 축상으로 승강 이동토록 설치된 구동축(5)과; 상기 구동축(5)의 상단부에 장착된 캠 부재(43)와; 일단에 상기 캠 부재(43)와 계합되는 캠 폴로워(46)가 형성되고 타단은 상기 척크부재(1a)에 고정되며, 상기 캠 부재(43)가 연결된 상기 구동축(5)이 상기 회전축(6)에 대하여 축상으로의 이동에 상기 캠 플로워(46)가 연동될시 상기 척크부재(1a)와 함께 상기 회전판부재(2)에 연하여 수평으로 이동하도록 설치된 링크부재(44)와; 상기 척크부재(1, 1a)가 동시에 웨이퍼를 항시 지지할 수 있도록 상기 구동축(5)을 상기 회전축(6)에 대하여 일정상태로 유지시키는 유지수단과; 상기 구동축(5)이 상기 회전축(6)에 대하여 축상으로 이동될시 상기 링크부재(44)를 통하여 상기 척크부재(1, 1a)가 웨이퍼를 해지할 수 있도록 상기 구동축의 하단부에 설치된 구동수단으로 구성된 웨이퍼 지지기구.
- 제16항에 있어서, 상기 유지수단은 상기 회전축(6)과 상기 구동축(5)의 하단부 사이에서 상호 축상으로 인장력을 부여받도록 이들 사이에 연결된 스프링(15)으로 구성된 웨이퍼 지지기구.
- 제16항에 있어서, 상기 구동수단은 상기 구동축(5)의 상기 하단부에 하향으로 돌출된 핀(47)으로 구성된 웨이퍼 지지기구.
- 제16항에 있어서, 상기 척크부재의 대향되는 2개는 상기 회전판부재(2)에 연하여 방사상으로 습동자재로 장착된 슬라이더 부재(45)에 설치하여 구성된 웨이퍼 지지기구.
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP?61-190246 | 1986-08-13 | ||
| JP190246 | 1986-08-13 | ||
| JP19024686 | 1986-08-13 | ||
| JP61285752A JPS63153839A (ja) | 1986-08-13 | 1986-11-29 | 基板の回転保持装置 |
| JP285752 | 1986-11-29 | ||
| JP?61-285752 | 1986-11-29 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR880003411A KR880003411A (ko) | 1988-05-17 |
| KR920000673B1 true KR920000673B1 (ko) | 1992-01-20 |
Family
ID=16254941
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1019870008806A KR920000673B1 (ko) | 1986-08-13 | 1987-08-11 | 웨이퍼 지지기구 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPS63153839A (ko) |
| KR (1) | KR920000673B1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7866058B2 (en) | 2006-08-30 | 2011-01-11 | Semes Co., Ltd. | Spin head and substrate treating method using the same |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0245951A (ja) * | 1988-08-08 | 1990-02-15 | Kyushu Electron Metal Co Ltd | 半導体基板の保持装置 |
| KR100277522B1 (ko) * | 1996-10-08 | 2001-01-15 | 이시다 아키라 | 기판처리장치 |
| US6497241B1 (en) * | 1999-12-23 | 2002-12-24 | Lam Research Corporation | Hollow core spindle and spin, rinse, and dry module including the same |
| JP4067307B2 (ja) | 2000-04-27 | 2008-03-26 | 株式会社荏原製作所 | 回転保持装置 |
| KR100367665B1 (ko) * | 2000-07-24 | 2003-01-10 | (주)케이.씨.텍 | 웨이퍼 고정장치 |
| JP4514942B2 (ja) * | 2000-12-07 | 2010-07-28 | 株式会社アルバック | 成膜装置 |
| JP4552222B2 (ja) * | 2001-09-21 | 2010-09-29 | ムラテックオートメーション株式会社 | ウェハのアライナー装置 |
| JP4468775B2 (ja) | 2004-09-14 | 2010-05-26 | 大日本スクリーン製造株式会社 | 基板保持回転装置 |
| JP4819010B2 (ja) * | 2007-09-04 | 2011-11-16 | 東京エレクトロン株式会社 | 処理装置、処理方法および記憶媒体 |
| KR100873153B1 (ko) * | 2007-10-05 | 2008-12-10 | 세메스 주식회사 | 스핀 헤드 |
| JP4601698B2 (ja) * | 2008-09-26 | 2010-12-22 | 株式会社日立国際電気 | 半導体製造方法及びその装置 |
| JP5460475B2 (ja) * | 2010-06-16 | 2014-04-02 | 東京エレクトロン株式会社 | 基板液処理装置 |
| JP5646528B2 (ja) * | 2012-03-09 | 2014-12-24 | 東京エレクトロン株式会社 | 液処理装置 |
| JP6181438B2 (ja) * | 2013-06-24 | 2017-08-16 | 株式会社荏原製作所 | 基板保持装置および基板洗浄装置 |
| JP6789048B2 (ja) * | 2016-09-23 | 2020-11-25 | 株式会社Screenホールディングス | 基板処理装置 |
-
1986
- 1986-11-29 JP JP61285752A patent/JPS63153839A/ja active Granted
-
1987
- 1987-08-11 KR KR1019870008806A patent/KR920000673B1/ko not_active IP Right Cessation
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7866058B2 (en) | 2006-08-30 | 2011-01-11 | Semes Co., Ltd. | Spin head and substrate treating method using the same |
Also Published As
| Publication number | Publication date |
|---|---|
| KR880003411A (ko) | 1988-05-17 |
| JPH039607B2 (ko) | 1991-02-08 |
| JPS63153839A (ja) | 1988-06-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR920000673B1 (ko) | 웨이퍼 지지기구 | |
| US4788994A (en) | Wafer holding mechanism | |
| KR100234539B1 (ko) | 반도체장치 제조용 식각 장치 | |
| EP0852393A2 (en) | Thermal reaction chamber for semiconductor wafer processing operations | |
| JPH11135600A (ja) | ロボット装置および処理装置 | |
| US20070110895A1 (en) | Single side workpiece processing | |
| JP3245833B2 (ja) | 半導体基板アライナー装置および方法 | |
| US6361418B1 (en) | Abrasive system | |
| US8082932B2 (en) | Single side workpiece processing | |
| KR100431515B1 (ko) | 반도체 세정설비에서의 웨이퍼 반전 유닛 | |
| US6312312B1 (en) | Polishing apparatus | |
| JP2021093527A (ja) | 実装装置 | |
| US20230163018A1 (en) | Substrate holding apparatus and substrate processing apparatus | |
| JPH10116869A (ja) | ウエハ検査装置 | |
| JP3578593B2 (ja) | 基板整列装置 | |
| JP3894669B2 (ja) | カセット形ロール自動脱着装置 | |
| KR980012221A (ko) | 웨이퍼의 자동 정렬장치 | |
| KR20190007376A (ko) | 기판 처리 장치 및 기판 처리 방법 | |
| JPH08255821A (ja) | シリコンウェハー搬送装置 | |
| KR20230056591A (ko) | 웨이퍼의 연삭 방법 및 연삭 장치 | |
| JPH1057875A (ja) | 基板処理装置 | |
| WO2019150556A1 (ja) | リム交換機、リム保持装置、及びタイヤ試験システム | |
| JP3614672B2 (ja) | ウェーハ研磨装置 | |
| KR20230038864A (ko) | 글래스 기판의 반전 유닛 및 이를 갖는 글래스 기판 검사 장치 | |
| TW202414526A (zh) | 基板處理裝置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| G160 | Decision to publish patent application | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20070110 Year of fee payment: 16 |
|
| EXPY | Expiration of term |