KR20170056540A - 손실성 매체 상의 유도 표면파 모드를 사용한 원격 표면 감지 - Google Patents
손실성 매체 상의 유도 표면파 모드를 사용한 원격 표면 감지 Download PDFInfo
- Publication number
- KR20170056540A KR20170056540A KR1020177006659A KR20177006659A KR20170056540A KR 20170056540 A KR20170056540 A KR 20170056540A KR 1020177006659 A KR1020177006659 A KR 1020177006659A KR 20177006659 A KR20177006659 A KR 20177006659A KR 20170056540 A KR20170056540 A KR 20170056540A
- Authority
- KR
- South Korea
- Prior art keywords
- wave
- lossy
- charging terminal
- surface waveguide
- induced
- Prior art date
Links
Images



















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/0218—Very long range radars, e.g. surface wave radar, over-the-horizon or ionospheric propagation systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/10—Systems for measuring distance only using transmission of interrupted, pulse modulated waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/10—Systems for measuring distance only using transmission of interrupted, pulse modulated waves
- G01S13/106—Systems for measuring distance only using transmission of interrupted, pulse modulated waves using transmission of pulses having some particular characteristics
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/36—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated with phase comparison between the received signal and the contemporaneously transmitted signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01P—WAVEGUIDES; RESONATORS, LINES, OR OTHER DEVICES OF THE WAVEGUIDE TYPE
- H01P3/00—Waveguides; Transmission lines of the waveguide type
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01P—WAVEGUIDES; RESONATORS, LINES, OR OTHER DEVICES OF THE WAVEGUIDE TYPE
- H01P5/00—Coupling devices of the waveguide type
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q1/00—Details of, or arrangements associated with, antennas
- H01Q1/04—Adaptation for subterranean or subaqueous use
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q9/00—Electrically-short antennas having dimensions not more than twice the operating wavelength and consisting of conductive active radiating elements
- H01Q9/04—Resonant antennas
- H01Q9/30—Resonant antennas with feed to end of elongated active element, e.g. unipole
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/20—Circuit arrangements or systems for wireless supply or distribution of electric power using microwaves or radio frequency waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
- G01S13/345—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal using triangular modulation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B3/00—Line transmission systems
- H04B3/52—Systems for transmission between fixed stations via waveguides
Abstract
손실성 매체 상의 유도 표면파 모드를 사용한 원격 표면 감지를 위한 다양한 시스템 및 방법이 개시되어 있다. 특히 한가지 시스템은 손실성 전도 매체의 표면을 따른 유도 표면파를 발진시키도록 구성되는 유도 표면 도파 프로브와 유도 표면파에 의해 조명된 원격 위치된 대상물에 의해 반사되는 후방산란을 수신하도록 구성되는 수신기를 포함한다. 특히, 한가지 방법은 유도 표면 도파 프로브의 충전 단자를 여기시킴으로써 손실성 전도 매체의 표면을 따라 유도 표면파를 발진시키는 단계와, 유도 표면파에 의해 조명된 원격 위치된 대상물에 의해 반사되는 후방산란을 수신하는 단계를 포함한다.
Description
관련 출원 교차 참조
본 출원은 2014년 9월 11일자로 출원된 발명의 명칭이 "REMOTE SURFACE SENSING USING GUIDED SURFACE WAVE MODES ON LOSSY MEDIA"인 동시계류중인 미국 가특허 출원 제62/049,209호 및 2015년 9월 9일자로 출원된 발명의 명칭이 "REMOTE SURFACE SENSING USING GUIDED SURFACE WAVE MODES ON LOSSY MEDIA"인 동시계류중인 미국 정출원 제14/848,705호에 대한 혜택과 우선권을 주장하며, 이들 양 출원은 본 명세서에 그 전문이 참조로 통합되어 있다.
본 출원은 발명의 명칭이 "Excitation and Use of Guided Surface Wave Modes on Lossy Media"인 동시계류중인 미국 정출원에 연관되어 있으며, 이 출원은 2013년 3월 7일자로 출원되고 출원 번호 제13/789,538호가 부여되어 있으며, 2014년 9월 11일자로 공개 번호 US2014/0252886 A1으로 공개되었고, 이 출원은 그 전문이 본 명세서에 참조로 통합되어 있다. 본 출원은 또한 발명의 명칭이 "Excitation and Use of Guided Surface Wave Modes on Lossy Media"인 동시계류중인 미국 정출원에 연관되어 있으며, 이 출원은 2013년 3월 7일자로 출원되고 출원 번호 제13/789,525호가 부여되어 있으며, 2014년 9월 11일자로 공개 번호 US2014/0252865 A1으로 공개되었고, 이 출원은 그 전문이 본 명세서에 참조로 통합되어 있다. 본 출원은 추가로 발명의 명칭이 "Excitation and Use of Guided Surface Wave Modes on Lossy Media"인 동시계류중인 미국 정출원에 연관되어 있으며, 이 출원은 2014년 9월 10일자로 출원되고 출원 번호 제14/483,089호가 부여되어 있으며, 이 출원은 그 전문이 본 명세서에 참조로 통합되어 있다. 본 출원은 추가로 발명의 명칭이 "Excitation and Use of Guided Surface Waves"인 동시계류중인 미국 정출원에 연관되어 있으며, 이 출원은 2015년 6월 2일자로 출원되고 출원 번호 제14/728,507호가 부여되어 있으며, 이 출원은 그 전문이 본 명세서에 참조로 통합되어 있다. 본 출원은 추가로 발명의 명칭이 "Excitation and Use of Guided Surface Waves"인 동시계류중인 미국 정출원에 연관되어 있으며, 이 출원은 2015년 6월 2일자로 출원되고 출원 번호 제14/728,492호가 부여되어 있으며, 이 출원은 그 전문이 본 명세서에 참조로 통합되어 있다.
한 세기 동안, 무선파(radio wave)에 의해 전송되는 신호는 종래의 안테나 구조를 사용하여 발진되는 방사 필드를 수반하여 왔다. 라디오 사이언스와는 대조적으로, 지난 세기의 전력 분배 시스템은 전기 전도체를 따라 유도되는 에너지의 전송을 수반하여 왔다. 라디오 주파수(RF)와 전력 전송 사이의 구분에 대한 이러한 이해는 1900년대 초 이래로 존재하여 왔다.
본 개시내용의 실시예는 손실성 매체 상의 유도 표면 도파 모드를 사용한 원격 표면 감지에 관련한다.
일 실시예에서, 특히, 시스템은 손실성 전도 매체의 표면을 따라 유도 표면파를 발진하도록 구성된 유도 표면 도파 프로브와, 유도 표면파에 의해 조명되는 원격 위치된 대상물에 의해 반사되는 후방산란을 수신하도록 구성된 수신기를 포함한다. 유도 표면 도파 프로브는 손실성 전도 매체의 복소 브루스터(Brewster) 입사각(θi,B)에서 입사된 파면을 합성하는 적어도 하나의 결과적 필드를 생성하도록 구성된 손실성 전도 매체 위로 상승되어 있는 충전 단자를 포함할 수 있다. 이 충전 단자는 복수의 충전 단자 중 하나일 수 있다.
이들 실시예의 하나 이상의 양태에서, 유도 표면 도파 프로브는 충전 단자에 전기적으로 결합된 급전 네트워크를 포함할 수 있고, 급전 네트워크는 유도 표면 도파 프로브의 부근에서 손실성 전도 매체와 연계된 복소 브루스터 입사각(θi,B)과 연계된 파 경사각(ψ)과 매칭되는 위상 지연(Φ)을 제공한다. 이 충전 단자는 복수의 충전 단자 중 하나일 수 있다. 급전 네트워크는 복수의 충전 단자에 복수의 위상 및 복수의 전압 크기를 부여하여 복수의 필드를 합성하도록 구성될 수 있고, 이 복수의 필드는 실질적으로 손실성 전도 매체의 유도 표면 도파 모드와 매칭되고, 그에 의해, 유도 표면파를 발진시킨다.
이들 실시예의 하나 이상의 양태에서, 유도 표면 도파 프로브는 규정된 반복율로 규정된 펄스 기간을 갖는 일련의 유도 표면파를 발진시키도록 구성될 수 있다. 유도 표면파는 주파수 변조 연속파일 수 있다. 원격 위치된 대상물은 손실성 전도 매체의 표면 상에 또는 손실성 전도 매체의 표면 위에 존재할 수 있다. 원격 위치된 대상물은 손실성 전도 매체 상의 또는 손실성 전도 매체 위의 저공 비행 항공기 또는 다른 수송체일 수 있다. 손실성 전도 매체는 지상 매체(terrestrial medium)일 수 있다.
이들 실시예의 하나 이상의 양태에서, 복수의 유도 표면 도파 프로브는 손실성 전도 매체의 표면을 따라 유도 표면파를 발진시키도록 구성될 수 있다. 복수의 수신기는 유도 표면파에 의해 조명되는 원격 위치된 대상물에 의해 반사되는 후방산란을 수신하도록 구성될 수 있다. 이동식 수송체가 수신기를 포함할 수 있다.
다른 실시예에서, 방법은 유도 표면 도파 프로브의 충전 단자를 여기시킴으로써 손실성 전도 매체의 표면을 따라 유도 표면파를 발진시키는 단계와, 유도 표면파에 의해 조명된 원격 위치된 대상물에 의해 반사되는 후방산란을 수신하는 단계를 포함한다. 충전 단자의 여기는 손실성 전도 매체의 복소 브루스터 입사각(θi,B)에서 입사되는 파면을 합성하는 결과적 필드를 생성할 수 있다. 적어도 부분적으로 이 후방산란에 기초하여 원격 위치된 대상물의 특성이 결정될 수 있다.
이들 실시예의 하나 이상의 양태에서, 유도 표면 도파 프로브는 충전 단자에 전기적으로 결합된 급전 네트워크를 포함할 수 있고, 급전 네트워크는 유도 표면 도파 프로브의 부근에서 손실성 전도 매체와 연계된 복소 브루스터 입사각(θi,B)과 연계된 파 경사각(ψ)과 매칭되는 위상 지연(Φ)을 제공한다. 유도 표면 도파 프로브는 규정된 반복율로 규정된 펄스 기간을 갖는 일련의 유도 표면파를 발진시키도록 구성될 수 있다.
본 기술 분야의 숙련자는 이하의 도면 및 상세한 설명의 검토시 본 개시내용의 다른 시스템, 방법, 특징 및 장점을 명백히 알 수 있거나, 명백히 알게될 것이다. 모든 이런 추가적 시스템, 방법, 특징 및 장점은 본 설명에 포함되고, 본 개시내용의 범주 내에 있으며, 첨부 청구범위에 의해 보호되는 것으로 의도된다.
추가적으로, 설명된 실시예의 모든 선택적인, 그리고, 양호한 특징과 변형은 본 명세서에서 고려되는 개시내용의 모든 양태에서 사용가능하다. 또한, 종속 청구항의 개별적 특징과 설명된 실시예의 모든 선택적이고 양호한 특징 및 변형은 서로 조합될 수 있으며, 그리고, 서로 교체가능하다.
이하의 도면을 참조하여 본 개시내용의 다수의 양태를 더 양호하게 이해할 수 있다. 도면의 구성요소는 반드시 축척대로 그려진 것은 아니며, 대신 본 개시내용의 원리를 명확히 예시하고자 강조가 이루어질 수 있다. 또한, 도면에서, 유사 참조 번호는 다수의 도면 전반에 걸쳐 대응 부분을 나타낸다.
도 1은 유도 전자기 필드와 방사 전자기 필드를 위한 거리의 함수로서의 필드 강도를 도시하는 차트이다.
도 2는 본 개시내용의 다양한 실시예에 따른 유도 표면파의 전송을 위해 사용되는 2개 영역과의 전파 계면을 예시하는 도면이다.
도 3은 본 개시내용의 다양한 실시예에 따른 도 2의 전파 계면에 관하여 배치된 유도 표면 도파 프로브를 예시하는 도면이다.
도 4는 본 개시내용의 다양한 실시예에 따른 1차 Hankel 함수의 근위(close-in) 및 원위(far-out) 점근선의 크기의 일 예의 플롯이다.
도 5a 및 도 5b는 본 개시내용의 다양한 실시예에 따른 유도 표면 도파 프로브에 의해 합성된 전기장의 복소 입사각을 예시하는 도면이다.
도 6은 본 개시내용의 다양한 실시예에 따른, 도 5a의 전기 필드가 브루스터 각도에서 손실성 전도 매체와 교차하는 위치의 충전 단자의 고도의 효과를 예시하는 도식적 표현이다.
도 7은 본 개시내용의 다양한 실시예에 따른 유도 표면 도파 프로브의 예의 도식적 표현이다.
도 8a 내지 도 8c는 본 개시내용의 다양한 실시예에 따른 도 3 내지 도 7의 유도 표면 도파 프로브의 등가 이미지 평면 모델의 예를 예시하는 도식적 표현이다.
도 9a 및 도 9b는 본 개시내용의 다양한 실시예에 따른 도 8b 및 도 8c의 등가 이미지 평면 모델의 고전적 전송 라인 모델과 단선 전송 라인의 예를 예시하는 도식적 표현이다.
도 10은 본 개시내용의 다양한 실시예에 따른 손실성 전도 매체의 표면을 따른 유도 표면파의 발진을 위한 도 3 및 도 7의 유도 표면 도파 프로브의 조정의 예를 예시하는 흐름도이다.
도 11은 본 개시내용의 다양한 실시예에 따른 도 3 및 도 7의 유도 표면 도파 프로브의 위상 지연과 파 경사각 사이의 관계의 예를 예시하는 플롯이다.
도 12는 본 개시내용의 다양한 실시예에 따른 유도 표면 도파 프로브의 예를 예시하는 도면이다.
도 13은 본 개시내용의 다양한 실시예에 따른 Hankel 크로스오버 거리에서 유도 표면 도파 모드를 매칭시키기 위한 복소 브루스터 각도에서의 합성된 전자기 필드의 입사를 예시하는 도식적 표현이다.
도 14는 본 개시내용의 다양한 실시예에 따른 도 12의 유도 표면 도파 프로브의 예의 도식적 표현이다.
도 15a는 본 개시내용의 다양한 실시예에 따른 유도 표면 도파 프로브의 충전 단자(T1)의 위상 지연(ΦU)의 허수부와 실수부의 예의 플롯을 포함한다.
도 15b는 본 개시내용의 다양한 실시예에 따른 도 14의 유도 표면 도파 프로브의 개략도이다.
도 16은 본 개시내용의 다양한 실시예에 따른 유도 표면 도파 프로브의 예를 예시하는 도면이다.
도 17은 본 개시내용의 다양한 실시예에 따른 도 16의 유도 표면 도파 프로브의 예의 도식적 표현이다.
도 18a 내지 도 18c는 본 개시내용의 다양한 실시예에 따른 유도 표면 도파 프로브에 의해 발진된 유도 표면파의 형태로 전송되는 에너지를 수신하기 위해 사용될 수 있는 수신 구조체의 예를 도시한다.
도 18d는 본 개시내용의 다양한 실시예에 따른 수신 구조체의 조정의 예를 예시하는 흐름도이다.
도 19는 본 개시내용의 다양한 실시예에 따른 유도 표면 도파 프로브에 의해 발진된 유도 표면파의 형태로 전송되는 에너지를 수신하기 위해 사용될 수 있는 추가적 수신 구조체의 예를 도시한다.
도 20a 내지 도 20e는 본 개시내용의 다양한 실시예에 따른 수신 구조체 및 유도 표면파 프로브에 대한 설명을 위해 사용되는 다양한 도식 기호의 예를 예시한다.
도 21은 본 개시내용의 다양한 실시예에 따른 방사 전자기 필드와 유도 전자기 필드에 대한 거리의 함수로서의 필드 강도를 예시하는 도식적 표현이다.
도 22는 본 개시내용의 다양한 실시예에 따른 하나 이상의 유도 표면 도파 프로브(들)를 포함하는 검출 시스템의 예의 도식적 표현이다.
도 1은 유도 전자기 필드와 방사 전자기 필드를 위한 거리의 함수로서의 필드 강도를 도시하는 차트이다.
도 2는 본 개시내용의 다양한 실시예에 따른 유도 표면파의 전송을 위해 사용되는 2개 영역과의 전파 계면을 예시하는 도면이다.
도 3은 본 개시내용의 다양한 실시예에 따른 도 2의 전파 계면에 관하여 배치된 유도 표면 도파 프로브를 예시하는 도면이다.
도 4는 본 개시내용의 다양한 실시예에 따른 1차 Hankel 함수의 근위(close-in) 및 원위(far-out) 점근선의 크기의 일 예의 플롯이다.
도 5a 및 도 5b는 본 개시내용의 다양한 실시예에 따른 유도 표면 도파 프로브에 의해 합성된 전기장의 복소 입사각을 예시하는 도면이다.
도 6은 본 개시내용의 다양한 실시예에 따른, 도 5a의 전기 필드가 브루스터 각도에서 손실성 전도 매체와 교차하는 위치의 충전 단자의 고도의 효과를 예시하는 도식적 표현이다.
도 7은 본 개시내용의 다양한 실시예에 따른 유도 표면 도파 프로브의 예의 도식적 표현이다.
도 8a 내지 도 8c는 본 개시내용의 다양한 실시예에 따른 도 3 내지 도 7의 유도 표면 도파 프로브의 등가 이미지 평면 모델의 예를 예시하는 도식적 표현이다.
도 9a 및 도 9b는 본 개시내용의 다양한 실시예에 따른 도 8b 및 도 8c의 등가 이미지 평면 모델의 고전적 전송 라인 모델과 단선 전송 라인의 예를 예시하는 도식적 표현이다.
도 10은 본 개시내용의 다양한 실시예에 따른 손실성 전도 매체의 표면을 따른 유도 표면파의 발진을 위한 도 3 및 도 7의 유도 표면 도파 프로브의 조정의 예를 예시하는 흐름도이다.
도 11은 본 개시내용의 다양한 실시예에 따른 도 3 및 도 7의 유도 표면 도파 프로브의 위상 지연과 파 경사각 사이의 관계의 예를 예시하는 플롯이다.
도 12는 본 개시내용의 다양한 실시예에 따른 유도 표면 도파 프로브의 예를 예시하는 도면이다.
도 13은 본 개시내용의 다양한 실시예에 따른 Hankel 크로스오버 거리에서 유도 표면 도파 모드를 매칭시키기 위한 복소 브루스터 각도에서의 합성된 전자기 필드의 입사를 예시하는 도식적 표현이다.
도 14는 본 개시내용의 다양한 실시예에 따른 도 12의 유도 표면 도파 프로브의 예의 도식적 표현이다.
도 15a는 본 개시내용의 다양한 실시예에 따른 유도 표면 도파 프로브의 충전 단자(T1)의 위상 지연(ΦU)의 허수부와 실수부의 예의 플롯을 포함한다.
도 15b는 본 개시내용의 다양한 실시예에 따른 도 14의 유도 표면 도파 프로브의 개략도이다.
도 16은 본 개시내용의 다양한 실시예에 따른 유도 표면 도파 프로브의 예를 예시하는 도면이다.
도 17은 본 개시내용의 다양한 실시예에 따른 도 16의 유도 표면 도파 프로브의 예의 도식적 표현이다.
도 18a 내지 도 18c는 본 개시내용의 다양한 실시예에 따른 유도 표면 도파 프로브에 의해 발진된 유도 표면파의 형태로 전송되는 에너지를 수신하기 위해 사용될 수 있는 수신 구조체의 예를 도시한다.
도 18d는 본 개시내용의 다양한 실시예에 따른 수신 구조체의 조정의 예를 예시하는 흐름도이다.
도 19는 본 개시내용의 다양한 실시예에 따른 유도 표면 도파 프로브에 의해 발진된 유도 표면파의 형태로 전송되는 에너지를 수신하기 위해 사용될 수 있는 추가적 수신 구조체의 예를 도시한다.
도 20a 내지 도 20e는 본 개시내용의 다양한 실시예에 따른 수신 구조체 및 유도 표면파 프로브에 대한 설명을 위해 사용되는 다양한 도식 기호의 예를 예시한다.
도 21은 본 개시내용의 다양한 실시예에 따른 방사 전자기 필드와 유도 전자기 필드에 대한 거리의 함수로서의 필드 강도를 예시하는 도식적 표현이다.
도 22는 본 개시내용의 다양한 실시예에 따른 하나 이상의 유도 표면 도파 프로브(들)를 포함하는 검출 시스템의 예의 도식적 표현이다.
우선, 개념 설명의 명료성을 제공하기 위해 몇몇 용어를 다음과 같이 규정한다. 먼저, 본 명세서에서 고려될 때, 방사 전자기 필드와 유도 전자기 필드 사이의 공식적 구별이 이루어진다.
본 명세서에서 고려될 때, 방사 전자기 필드는 도파로에 구속되지 않은 파 형태의, 소스 구조로부터 출사된 전자기 에너지를 포함한다. 예로서, 방사 전자기 필드는 일반적으로 전기적 구조, 예컨대, 안테나를 벗어나 대기 또는 다른 매체를 통해 전파되며 어떠한 도파 구조에도 구속되지 않은 필드이다. 방사된 전자기파가 전기적 구조, 예컨대 안테나를 벗어나고 나면, 이들은 소스가 계속 동작하고 있는지 여부에 무관하게 이들이 소산될 때까지 그 소스에 독립적으로 전파 매체(예컨대 공기) 내에서 계속 전파된다. 전자기파가 방사되고 나면, 이들은 인터셉트되지 않는 한 회수될 수 없고, 인터셉트되지 않는다면, 방사 전자기파 내의 고유한 에너지는 영원히 소실된다. 전자기 구조, 예컨대 안테나는 구조 손실 저항에 대한 방사 저항의 비율을 최대화함으로써 전자기 필드를 방사하도록 설계된다. 방사된 에너지는 공간 내에서 확산되며, 수신기가 존재하는지 여부에 무관하게 소실된다. 방사된 필드의 에너지 밀도는 기하학적 확산에 기인한 거리의 함수이다. 따라서, 본 명세서에서 사용될 때 모든 형태의 용어 "방사"는 이러한 형태의 전자기 전파를 지칭한다.
유도 전자기 필드는 전파되는 전자기파이며, 그 에너지는 상이한 전자기 특성을 갖는 매체들 사이의 경계 내에 또는 경계 부근에 집중된다. 이러한 개념에서, 유도 전자기 필드는 도파로에 구속되어 있는 것이며 도파로 내에서 흐르는 흐름에 의해 반송되는 것을 특징으로 할 수 있다. 유도 전자기파 내에서 반송되는 에너지를 수신 및/또는 소산시키는 어떠한 부하도 존재하지 않는 경우, 이때, 유도 매체의 전도율 내에서 소산되는 것을 제외하면 어떠한 에너지도 소실되지 않는다. 달리 말하면, 유도 전자기파에 대한 어떠한 부하도 존재하지 않는 경우, 이때, 어떠한 에너지도 소비되지 않는다. 따라서, 유도 전자기 필드를 발생시키는 발생기 또는 다른 소스는 저항성 부하가 존재하지 않는 한 실제 파워를 전달하지 않는다. 이 때문에, 이런 발생기 또는 다른 소스는 부하가 제공될 때까지 실질적으로 이상적으로 운전된다. 이는 어떠한 전기적 부하도 존재하지 않는 파워 라인을 통해 전송되는 60 Hertz 전자기파를 발생시키기 위해 발생기를 운전하는 것과 유사하다. 유도 전자기 필드 또는 파는 "전송 라인 모드"라 명명되는 바에 상당한다. 이는 방사파를 발생시키기 위해 항상 실제 파워가 공급되는 방사 전자기파와 대조적이다. 방사 전자기파와는 달리, 유도 전자기 에너지는 에너지 소스가 비가동 상태로 전환된 이후 유한 길이 도파로를 따른 전파를 지속하지 않는다. 따라서, 본 명세서에서 사용될 때 모든 그 형태에서 용어 "유도"는 전자기 전파의 이러한 전송 모드를 지칭한다.
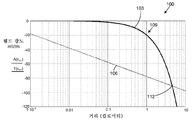
이제 도 1을 참조하면, 방사 전자기 필드와 유도 전자기 필드 사이의 구분을 추가로 예시하기 위해 로그-dB 플롯에서 킬로미터 단위 거리의 함수로서 미터당 볼트의 임의적 기준에 기초한 데시벨(dB) 단위 필드 강도의 그래프(100)가 도시되어 있다. 도 1의 그래프(100)는 거리의 함수로서 유도 전자기 필드의 필드 강도를 보여주는 유도 필드 강도 곡선(103)을 도시한다. 이 유도 필드 강도 곡선(103)은 본질적으로 전송 라인 모드와 동일하다. 또한, 도 1의 그래프(100)는 거리의 함수로서 방사 전자기 필드의 필드 강도를 보여주는 방사 필드 강도 곡선(106)을 도시한다.
유도 파와 방사 전파 각각을 위한 곡선들(103, 106)의 형상이 관심의 대상이다. 방사 필드 강도 곡선(106)은 기하학적으로 강하하고(1/d, 여기서, d는 거리), 이는 로그-로그 스케일에서 직선으로 나타나 있다. 한편, 유도 필드 강도 곡선(103)은  의 특징적인 지수적 쇠퇴를 가지고, 로그-로그 스케일에서 특유의 굴곡형상(knee)(109)을 나타낸다. 유도 필드 강도 곡선(103) 및 방사 필드 강도 곡선(106)은 지점(112)에서 교차하고, 이 지점은 교차 거리에서 나타난다. 교차 지점(112)에서의 교차 거리 미만인 거리에서, 유도 전자기 필드의 필드 강도는 대부분의 위치에서 방사 전자기 필드의 필드 강도보다 현저히 더 크다. 교차 거리보다 큰 거리에서, 그 반대가 사실이 된다. 따라서, 유도 필드 강도 곡선(103) 및 방사 필드 강도 곡선(106)은 유도 전자기 필드와 방사 전자기 필드 사이의 근본적 전파 차이점을 추가로 예시한다. 유도 전자기 필드와 방사 전자기 필드 사이의 차이점에 대한 약식 설명은 본 명세서에 그 전문이 참조로 통합되어 있는 Milligan, T.의 Modern Antenna Design(McGraw-Hill, 1st Edition, 1985, pp.8-9)을 참조한다.
의 특징적인 지수적 쇠퇴를 가지고, 로그-로그 스케일에서 특유의 굴곡형상(knee)(109)을 나타낸다. 유도 필드 강도 곡선(103) 및 방사 필드 강도 곡선(106)은 지점(112)에서 교차하고, 이 지점은 교차 거리에서 나타난다. 교차 지점(112)에서의 교차 거리 미만인 거리에서, 유도 전자기 필드의 필드 강도는 대부분의 위치에서 방사 전자기 필드의 필드 강도보다 현저히 더 크다. 교차 거리보다 큰 거리에서, 그 반대가 사실이 된다. 따라서, 유도 필드 강도 곡선(103) 및 방사 필드 강도 곡선(106)은 유도 전자기 필드와 방사 전자기 필드 사이의 근본적 전파 차이점을 추가로 예시한다. 유도 전자기 필드와 방사 전자기 필드 사이의 차이점에 대한 약식 설명은 본 명세서에 그 전문이 참조로 통합되어 있는 Milligan, T.의 Modern Antenna Design(McGraw-Hill, 1st Edition, 1985, pp.8-9)을 참조한다.
앞서 이루어진, 방사 전자기파와 유도 전자기파 사이의 구분은 공식적으로 쉽게 표현되고 근거 기반으로 이루어진다. 상기 두 개의 이러한 다양한 해결책은 하나의 동일한 선형 편미분 방정식으로부터 유래되고, 이 파 방정식은 분석적으로 문제에 부여되는 경계 조건의 결과이다. 파 방정식을 위한 그린 함수(Green function) 자체는 방사 파와 유도 파의 특징 사이의 구분을 포함한다.
빈 공간에서, 파 방정식은 그 고유함수가 복소 파수 평면 상에서 고유값의 연속 스펙트럼을 소유하는 미분 연산자이다. 이 횡방향 전자기(TEM) 필드는 방사 필드라 지칭되며, 그 전파 필드는 "헤르츠 파"라 지칭된다. 그러나, 전도성 경계의 존재시, 파 방정식과 경계 조건을 더한 것은 수학적으로 이산 스펙트럼의 합과 연속 스펙트럼을 더한 것으로 구성되는 파수의 스펙트럼적 표현을 도출한다. 이에 대하여, Sommerfeld, A.의 "Uber die Ausbreitung der Wellen in der Drahtlosen Telegraphie"(Annalen der Physik, Vol. 28, 1909, pp. 665-736)을 참조한다. 또한, Partial Differential Equations in Physics - Lectures on Theoretical Physics: Volume VI(Academic Press, 1949, pp. 236-289, 295-296)의 챕터 6에 공개된 Sommerfeld, A.의 "Problems of Radio"; Collin, R. E.의 "Hertzian Dipole Radiating Over a Lossy Earth or Sea: Some Early and Late 20th Century Controversies"(IEEE Antennas and Propagation Magazine, Vol. 46, No. 2, April 2004, pp. 64-79); 및 Reich, H. J., Ordnung, P.F, Krauss, H.L. 및 Skalnik, J.G.의 Microwave Theory and Techniques(Van Nostrand, 1953, pp. 291-293)도 참조하며, 이들 참조문헌 각각은 그 전문이 본 명세서에 참조로 통합되어 있다.
용어 "지상파" 및 "표면파"는 두 개의 뚜렷하게 서로 다른 물리적 전파 현상을 나타낸다. 표면파는 분석학적으로 평면파 스펙트럼에서 이산 성분을 산출하는 특이적 폴(pole)으로부터 발생한다. 예를 들어, Cullen, A.L.의 "The Excitation of Plane Surface Waves"(Proceedings of the IEE (British), Vol. 101, Part IV, August 1954, pp. 225-235) 참조. 이러한 맥락에서, 표면파는 유도 표면파가 되는 것으로 간주된다. 표면파(Zenneck-Sommerfeld 유도 파 개념에서)는 물리적으로, 그리고, 수학적으로 이제 라디오 방송으로부터 매우 친숙한 지상파(Weyl-Norton-FCC 개념에서)와는 동일하지 않다. 이들 두 전파 메커니즘은 복소 평면에서 상이한 유형의 고유값 스펙트럼(연속 또는 이산)의 여기로부터 발생한다. 유도 표면파의 필드 강도는 도 1의 곡선(103)에 의해 예시된 바와 같이 거리에 따라 지수적으로 쇠퇴하고(손실성 도파로에서의 전파와 매우 유사함), 지상파의 고전적 헤르츠 방사선과는 반대인 레디얼 전송 라인(radial transmission line)에서의 전파와 유사하며, 지상파의 고전적 헤르츠 방사선은 구형으로 전파하고, 고유값의 연속체를 소유하며, 기하학적으로 도 1의 곡선(106)에 의해 예시된 바와 같이 강하하고, 가지자름 적분(branch-cut integral)으로부터 얻어진다. "The Surface Wave in Radio Propagation over Plane Earth" (Proceedings of the IRE, Vol. 25, No. 2, February, 1937, pp. 219-229) 및 "The Surface Wave in Radio Transmission" (Bell Laboratories Record, Vol. 15, June 1937, pp. 321-324)에서 C.R. Burrows에 의해 경험적으로 예시된 바와 같이, 수직 안테나는 지상파를 방사하지만 유도 표면파를 발진시키지는 않는다.
상술한 바를 요약하면, 먼저, 가지절단 적분에 대응하는 파수 고유값 스펙트럼의 연속 부분은 방사 필드를 생성하고, 두 번째로 적분의 윤곽에 의해 포위되는 폴로부터 발생하는 이산 스펙트럼 및 대응하는 나머지 합은 비-TEM 진행 표면파를 초래하고, 이는 전파에 횡방향으로 지수적으로 감쇠된다. 이런 표면파는 유도 전송 라인 모드이다. 추가적 설명에 대해서는 Friedman, B.의 Principles and Techniques of Applied Mathematics(Wiley, 1956, pp. pp. 214, 283-286, 290, 298-300)를 참조한다.
자유 공간에서, 안테나는 파 방정식의 연속 고유값을 여기하고, 이는 방사 필드이며, 여기서 Ez 및 Hφ 인페이즈(in-phase)를 갖는 외향 전파 RF 에너지가 영원히 소실된다. 다른 한편, 도파 프로브는 이산 고유값을 여기하고, 이는 전송 라인 전파를 초래한다. Collin, R. E.의 Field Theory of Guided Waves(McGraw-Hill, 1960, pp. 453, 474-477) 참조. 이런 이론적 분석은 손실성 균질 매체의 평면형 또는 구형 표면에 걸친 개방 표면 유도 파 발진의 가설적 가능성을 제공하였지만, 한세기 넘어 동안, 임의의 실용적 효율로 이를 달성하기 위한 어떠한 알려진 구조도 공학 기술 분야에 존재하지 않는다. 불행하게, 1900년대 초에 출현한 이래로, 앞서 설명한 이론적 분석은 본질적으로 이론으로 남아있으며, 손실성 균질 매체의 평면형 또는 구형 표면에 걸친 개방 표면 유도 파의 발진을 실용적으로 달성하기 위한 구조는 알려져 있지 않다.
본 개시내용의 다양한 실시예에 따라서, 다양한 유도 표면 도파 프로브가 설명되며, 이는 손실성 전도 매체의 표면을 따른 유도 표면 도파 모드에 결합되는 전기 필드를 여기하도록 구성된다. 이런 유도 전자기 필드는 크기 및 위상이 손실성 전도 매체의 표면 상에서 유도 표면파 모두에 실질적으로 모드 매칭된다. 이런 유도 표면파 모드는 또한 Zenneck 도파 모드라고도 명명될 수 있다. 본 명세서에 설명된 유도 표면 도파 프로브에 의해 여기된 결과적 필드가 손실성 전도 매체의 표면 상의 유도 표면 도파 모드에 실질적으로 모드 매칭된다는 사실로 인해, 유도 표면파 형태의 유도 전자기 필드가 손실성 전도 매체의 표면을 따라 발진된다. 일 실시예에 따라서, 손실성 전도 매체는 지구 같은 지상 매체를 포함한다.
도 2를 참조하면, Zenneck, J.의 논문 "On the Propagation of Plane Electromagnetic Waves Along a Flat Conducting Surface and their Relation to Wireless Telegraphy"(Annalen der Physik, Serial 4, Vol. 23, September 20, 1907, pp. 846-866)에서 Jonathan Zenneck에 의해 1907년에 유도된 Maxwell 방정식에 대한 경계값 해에 대한 검토를 제공하는 전파 계면이 도시되어 있다. 도 2는 영역 1로 명시된 손실성 전도 매체와 영역 2로 명시된 절연체 사이의 계면을 따른 레디얼 전파 파를 위한 원기둥 좌표를 도시한다. 영역 1은 예로서 임의의 손실성 전도 매체를 포함할 수 있다. 일 예에서, 이런 손실성 전도 매체는 지구나 다른 매체 같은 지상 매체를 포함할 수 있다. 영역 2는 영역 1과 경계 계면을 공유하면서 영역 1에 비해 다른 구성 파라미터를 갖는 제2 매체이다. 영역 2는 예로서 대기 또는 다른 매체 같은 임의의 절연체를 포함할 수 있다. 이런 경계 계면을 위한 반사 계수는 복수 브루스터 각도에서의 입사에 대해서만 0으로 진행한다. Stratton, J.A.의 Electromagnetic Theory(McGraw-Hill, 1941, p. 516) 참조.
다양한 실시예에 따라서, 본 개시내용은 다양한 유도 표면 도파 프로브를 기술하며, 이는 영역 1을 포함하는 손실성 전도 매체의 표면 상의 유도 표면 도파 모드에 실질적으로 모드 매칭되는 전자기 필드를 생성한다. 다양한 실시예에 따라서, 이런 전자기 필드는 실질적으로 손실성 전도 매체의 복소 브루스터 각도에서 입사된 파면을 합성하고, 이는 0 반사를 초래할 수 있다.
추가적 설명을 위해, ejωt 필드 변동이 가정되고, ρ≠0 및 z≥0인(z는 영역 1의 표면에 수직인 수직 좌표이고 ρ는 원기둥 좌표에의 반경방향 치수임) 영역 2에서, 계면을 따른 경계 조건을 충족하는 Maxwell의 방정식의 Zenneck의 폐쇄형의 정확한 해는 다음의 전기 필드 및 자기 필드 성분에 의해 표현된다:
ejωt 필드 변동이 가정되고 ρ≠0 및 z≤0인 영역 1에서, 계면을 따른 경계 조건을 충족하는 Maxwell의 방정식의 Zenneck의 폐쇄형의 정확한 해는 다음의 전기 필드 및 자기 필드 성분에 의해 표현된다:
이들 방정식에서, z는 영역 1의 표면에 수직인 수직 좌표이고, ρ는 레디얼 좌표이며,  는 차수가 n인 제2 유형의 복소 편각 Hankel 함수이며, u1은 영역 1에서 양의 수직 (z) 방향의 전파 상수이고, u2는 영역 2에서 수직 (z) 방향의 전파 상수이며, σ1은 영역 1의 전도율이고, ω는 2πf와 같고 여기서 f는 여기 수파수이고, εo는 자유 공간의 유전율이며, ε1은 영역 1의 유전율이고, A는 소스에 의해 부여되는 소스 상수이고, γ는 표면파 레디얼 전파 상수이다.
는 차수가 n인 제2 유형의 복소 편각 Hankel 함수이며, u1은 영역 1에서 양의 수직 (z) 방향의 전파 상수이고, u2는 영역 2에서 수직 (z) 방향의 전파 상수이며, σ1은 영역 1의 전도율이고, ω는 2πf와 같고 여기서 f는 여기 수파수이고, εo는 자유 공간의 유전율이며, ε1은 영역 1의 유전율이고, A는 소스에 의해 부여되는 소스 상수이고, γ는 표면파 레디얼 전파 상수이다.
±z 방향에서의 전파 상수는 영역 1과 영역 2 사이의 계면 위 및 아래에서 파 방정식을 분리시키고 경계 조건을 부여함으로써 결정된다. 이러한 행위는 영역 2에서 다음을 제공한다.
그리고, 영역 1에서 다음을 제공한다.
레디얼 전파 상수(γ)는 다음에 의해 주어진다.
이는 n이 다음 식에 의해 주어지는 복소 굴절 지수인 복소 표현이다.
위의 방정식 모두에서,
이고, 여기서, εr은 영역 1의 상대 유전율을 포함하고, σ1은 영역 1의 전도율이며, εo는 자유 공간의 유전율이고, μo는 자유 공간의 유전율을 포함한다. 따라서, 생성된 표면파는 계면에 평행하게 전파하고, 그에 수직방향으로 지수적으로 쇠퇴한다. 이는 소실이라 알려져 있다.
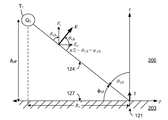
따라서, 방정식 (1)-(3)은 원기둥-대칭적 레디얼-전파 도파 모드인 것으로 고려될 수 있다. Barlow, H. M. 및 Brown, J.의 Radio Surface Waves(Oxford University Press, 1962, pp. 10-12, 29-33) 참조. 본 개시내용은 이러한 "개방 경계" 도파 모드를 여기시키는 구조를 구체화한다. 구체적으로, 다양한 실시예에 따라서, 유도 표면 도파 프로브는 전압 및/또는 전류가 공급되면서 영역 2와 영역 1 사이의 경계 계면에 대해 위치되는 적절한 크기의 충전 단자를 구비한다. 이는 도 3을 참조로 더 양호하게 이해될 수 있으며, 도 3은 손실성 전도 매체(203)에 의해 제공되는 평면에 수직인 수직 축(z)을 따라 손실성 전도 매체(203)(예를 들어, 지구) 위로 T1 고도에 있는 충전 단자를 포함하는 유도 표면 도파 프로브(200a)의 예를 도시한다. 손실성 전도 매체(203)는 영역 1을 구성하고, 제2 매체(206)는 영역 2를 구성하며, 손실성 전도 매체(203)와 경계 계면을 공유한다.
일 실시예에 따라서, 손실성 전도 매체(203)는 지구 같은 지상 매체를 포함한다. 이 때문에, 이런 지상 매체는 자연적이든 인공적이든 그 위에 포함된 모든 구조 또는 형태를 포함한다. 예로서, 이런 지상 매체는 바위, 토양, 담수, 해수, 나무, 초목 및 우리의 행성을 구성하는 모든 다른 자연적 요소 같은 자연적 요소를 포함할 수 있다. 추가적으로, 이런 지상 매체는 콘크리트, 아스팔트, 건축 재료 및 다른 인공 재료 같은 인공 요소를 포함할 수 있다. 다른 실시예에서, 손실성 전도 매체(203)는 자연적으로 발생하든 인공적이든 지구 이외의 소정 매체를 포함할 수 있다. 다른 실시예에서, 손실성 전도 매체(203)는 인공 표면 및 구조, 예컨대, 자동차, 항공기, 인공 재료(예컨대, 합판, 플라스틱 시트 또는 다른 재료)나 다른 매체 같은 다른 매체를 포함할 수 있다.
손실성 전도 매체(203)가 지상 매체 또는 지구를 포함하는 경우에, 제2 매체(206)는 그라운드 위의 대기를 포함할 수 있다. 이 때문에, 대기는 "대기 매체"라 명명될 수 있고, 이는 지구의 대기를 구성하는 공기나 다른 요소를 포함한다. 추가적으로, 제2 매체(206)는 손실성 전도 매체(203)에 비해 다른 매체를 포함할 수 있다.
유도 표면 도파 프로브(200a)는 예를 들어 수직 급전 라인 전도체를 거쳐 충전 단자(T1)에 여기 소스(212)를 결합하는 급전 네트워크(209)를 포함한다. 다양한 실시예에 따라서, 전하(Q1)가 충전 단자(T1)에 부여되어 임의의 주어진 순간에 단자(T1)에 인가된 전압에 기초한 전기 필드를 합성한다. 전기 필드(E)의 입사각(θi)에 따라, 영역 1을 포함하는 손실성 전도 매체(203)의 표면 상의 유도 표면 도파 모드에 전기 필드를 실질적으로 모드 매칭시키는 것이 가능하다.
방정식 (1)-(6)의 Zenneck 폐쇄형 해를 고려함으로써, 영역 1과 영역 2 사이의 Leontovich 임피던스 경계 조건은 다음과 같이 기술될 수 있다.
여기서  는 양의 수직 (+z) 방향에 단위 법선이고,
는 양의 수직 (+z) 방향에 단위 법선이고,  는 앞서 방정식 (1)에 의해 표현된 영역 2에서의 자기 필드 강도이다. 방정식 (13)은 방정식 (1)-(3)에 명시된 전기 및 자기 필드가 경계 계면을 따라 레디얼 표면 전류 밀도를 초래할 수 있다는 것을 의미하며, 레디얼 표면 전류 밀도는 다음에 의해 명시될 수 있다.
는 앞서 방정식 (1)에 의해 표현된 영역 2에서의 자기 필드 강도이다. 방정식 (13)은 방정식 (1)-(3)에 명시된 전기 및 자기 필드가 경계 계면을 따라 레디얼 표면 전류 밀도를 초래할 수 있다는 것을 의미하며, 레디얼 표면 전류 밀도는 다음에 의해 명시될 수 있다.
여기서 A는 상수이다. 또한, 유도 도파 프로브(200)에 대한 근위에서( 에 대해), 상술한 방정식 (14)는 다음과 같은 거동을 갖는다는 것을 유의하여야 한다.
에 대해), 상술한 방정식 (14)는 다음과 같은 거동을 갖는다는 것을 유의하여야 한다.
음의 부호는 소스 전류(Io)가 도 3에 예시된 바와 같이 수직 상향으로 흐른다는 것을 의미하며, "근위" 그라운드 전류는 반경방향 내향으로 흐른다. Hφ "근위"에 매칭되는 필드에 의해, 다음이 결정될 수 있다.
여기서, 방정식 (1)-(6) 및 (14)에서 q1= C1V1이다. 따라서, 방정식 (14)의 레디얼 표면 전류 밀도는 다음과 같이 재기술될 수 있다.
방정식 (1)-(6) 및 (17)에 의해 표현되는 필드는 지상파 전파와 연계된 방사 필드가 아닌 손실성 계면에 결합된 전송 라인 모드의 특성을 갖는다. Barlow, H. M. 및 Brown, J.의 Radio Surface Waves(Oxford University Press, 1962, pp. 1-5) 참조.
여기서, 방정식 (1)-(6) 및 (17)에서 사용되는 Hankel 함수의 특성의 고찰이 파 방정식의 이들 해에 대해 제공된다. 제1 및 제2 유형, 그리고, 차수 n의 Hankel 함수는 제1 및 제2 유형의 표준 Bessel 함수의 복소 조합으로서 표현된다는 것을 알 수 있다.
이들 함수는 각각 반경방향 내향( ) 및 외향(
) 및 외향( ) 전파하는 원통형 파를 나타낸다. 이러한 정의는 관계 e± jx=cos x± j sin x와 유사하다. 예로서, Harrington, R.F.의 Time-Harmonic Fields(McGraw-Hill, 1961, pp. 460-463) 참조.
) 전파하는 원통형 파를 나타낸다. 이러한 정의는 관계 e± jx=cos x± j sin x와 유사하다. 예로서, Harrington, R.F.의 Time-Harmonic Fields(McGraw-Hill, 1961, pp. 460-463) 참조.
이  는
는  및
및  의 급수 정의(series definition)로부터 직접적으로 얻어지는 그 대각 점근 거동(large argument asymptotic behavior)으로부터 인식될 수 있다. 유도 표면 도파 프로브로부터의 원위:
의 급수 정의(series definition)로부터 직접적으로 얻어지는 그 대각 점근 거동(large argument asymptotic behavior)으로부터 인식될 수 있다. 유도 표면 도파 프로브로부터의 원위:
이는 ejωt로 승산되면,  공간 변동을 갖는 형태
공간 변동을 갖는 형태  의 외향 전파하는 원통형 파이다. 제1 차수(n=1) 해는 다음이 되는 방정식 (20a)로부터 결정될 수있다.
의 외향 전파하는 원통형 파이다. 제1 차수(n=1) 해는 다음이 되는 방정식 (20a)로부터 결정될 수있다.
유도 표면 도파 프로브에 대한 근위( 에 대해)에서, 제1 차수 및 제2 유형의 Hankel 함수는 다음과 같이 거동한다.
에 대해)에서, 제1 차수 및 제2 유형의 Hankel 함수는 다음과 같이 거동한다.
이들 점근선 방정식은 복소량임을 유의하여야 한다. x가 실수량이면, 방정식 (20b) 및 (21)은  만큼 위상이 다르고, 이는 45도 또는 등량으로 λ/8의 추가 위상 전진 또는 "위상 부스트"에 대응한다. 제2 유형의 제1 차수 Hankel 함수의 근위 및 원위 점근선은 이들이 ρ=Rx의 거리에서 동일한 크기로 이루어지게 되는 Hankel "크로스오버" 또는 전이 지점을 갖는다.
만큼 위상이 다르고, 이는 45도 또는 등량으로 λ/8의 추가 위상 전진 또는 "위상 부스트"에 대응한다. 제2 유형의 제1 차수 Hankel 함수의 근위 및 원위 점근선은 이들이 ρ=Rx의 거리에서 동일한 크기로 이루어지게 되는 Hankel "크로스오버" 또는 전이 지점을 갖는다.
따라서, Hankel 크로스오버 지점을 지나면, "원위" 표현은 Hankel 함수의 "근위" 표현보다 우세하다. Hankel 크로스오버 지점에 대한 거리(또는 Hankel 크로스오버 거리)는 -jγρ에 대해 방정식 (20b) 및 (21)을 같다고 놓고 Rx에 대해 푸는 것에 의해 발견될 수 있다. x=σ/ωεo에서, 원위 및 근위 Hankel 함수 점근선은 주파수 의존적이고, Hankel 크로스오버 지점은 주파수가 낮아짐에 따라 외향 이동한다는 것을 알 수 있다. 또한, Hankel 함수 점근선은 또한 손실성 전도 매체의 전도율(σ)이 변화함에 따라 변할 수 있다는 것을 유의하여야 한다. 예로서, 토양의 전도율은 기후 조건의 변화에 따라 변할 수 있다.
도 4를 참조하면, 1850 kHz의 동작 주파수에서 상대 유전율 εr = 15 및 σ = 0.010 mhos/m의 영역 1 전도율에 대하여 방정식 (20b) 및 (21)의 제1 차수 Hankel 함수의 크기의 플롯의 일 예가 도시되어 있다. 곡선(115)은 방정식 (20b)의 원위 점근선의 크기이고, 곡선(118)은 방정식 (21)의 근위 점근선의 크기이며, Hankel 크로스오버 지점(121)은 Rx = 54 feet의 거리에서 발생한다. 크기는 동일하지만, Hankel 크로스오버 지점(121)에서 두 점근선 사이에는 위상 오프셋이 존재한다. 또한, Hankel 크로스오버 거리는 동작 주파수의 파장보다 매우 작다는 것을 알 수 있다.
영역 2에서의 Zenneck 폐쇄형 해의 방정식 (2) 및 (3)에 의해 주어지는 전자기 성분을 고려하면, Ez와 Eρ의 비율은 점근적으로 다음과 같이 진행함을 알 수 있다.
여기서, n은 방정식 (10)의 복소 굴절 지수이고, θi 는 전기 필드의 입사각이다. 추가적으로, 방정식 (3)의 모드 매칭된 전기 필드의 수직 성분은 점근적으로 다음과 같이 진행한다.
이는 단자 전압  에서의 상승된 충전 단자의 커패시턴스의 고립 컴포넌트 상의 자유 전하에 선형적으로 비례한다.
에서의 상승된 충전 단자의 커패시턴스의 고립 컴포넌트 상의 자유 전하에 선형적으로 비례한다.
예로서, 도 3의 상승된 충전 단자(T1)의 높이(H1)가 충전 단자(T1)의 자유 전하의 양에 영향을 준다. 충전 단자(T1)가 영역 1의 그라운드 평면 부근에 있을 때, 단자 상의 전하(Q1)의 대부분은 "속박"된다. 충전 단자(T1)가 상승됨에 따라, 충전 단자(T1)가 실질적으로 모든 고립 전하가 자유 상태가 되는 높이에 도달할 때까지 속박 전하가 풀려진다.
충전 단자(T1)를 위한 증가된 용량성 고도의 장점은 상승된 충전 단자(T1) 상의 전하가 추가로 그라운드 평면으로부터 제거되어 증가된 양의 자유 전하( )를 초래함으로써 에너지를 유도 표면 도파 모드로 결합시킨다는 것이다. 충전 단자(T1)가 그라운드 평면으로부터 이격 이동함에 따라, 전하 분포는 단자의 표면 주변에 더욱 균일하게 분포되게 된다. 자유 전하의 양은 충전 단자(T1)의 자기 용량(self-capacitance)에 관련된다.
)를 초래함으로써 에너지를 유도 표면 도파 모드로 결합시킨다는 것이다. 충전 단자(T1)가 그라운드 평면으로부터 이격 이동함에 따라, 전하 분포는 단자의 표면 주변에 더욱 균일하게 분포되게 된다. 자유 전하의 양은 충전 단자(T1)의 자기 용량(self-capacitance)에 관련된다.
예로서, 구형 단자의 용량은 그라운드 평면 위쪽 물리적 높이의 함수로서 표현될 수 있다. 완전한 그라운드 위 h의 물리적 높이에 있는 구체의 용량은 다음에 의해 주어진다.
여기서, 구체의 직경은 2a이고, M=a/2h이며, h는 구형 단자의 높이이다. 알 수 있는 바와 같이, 단자 높이(h)의 증가는 충전 단자의 용량(C)을 감소시킨다. 직경의 약 4배(4D=8a) 높이 이상에 있는 충전 단자(T1)의 고도에 대하여, 전하 분포는 구형 단자 주변에서 대략 균일하며, 이는 유도 표면 도파 모드로의 결합을 향상시킬 수 있다.
충분히 고립된 단자의 경우에, 전도성 구체의 자기 용량은 C=4πεoa로 추산될 수 있고, 여기서, a는 미터 단위의 구체의 반경이며, 디스크의 자기 용량은 C=8εoa로 추산될 수 있고, 여기서, a는 미터 단위의 디스크의 반경이다. 충전 단자(T1)는 구, 디스크, 원통, 원추, 원환체, 후드(hood), 하나 이상의 링 또는 임의의 다른 무작위적 형상이나 형상들의 조합 같은 임의의 형상을 포함할 수 있다. 등가 구체 직경이 결정되고, 충전 단자(T1)의 위치설정을 위해 사용될 수 있다.
이는 충전 단자(T1)가 손설성 전도 매체(203) 위의 hp=H1의 물리적 높이로 상승되어 있는 도 3의 예를 참조로 추가로 이해될 수 있다. "속박" 전하의 영향을 감소시키기 위해, 충전 단자(T1)는 속박 전하 효과를 감소시키도록 충전 단자(T1)의 구체 직경(또는 등가 구체 직경)의 적어도 4배인 물리적 높이에 위치될 수 있다.
다음에 도 5a를 참조하면, 도 3의 충전 단자(T1) 상의 상승된 전하(Q1)에 의해 생성된 전기 필드의 광선 광학 해석이 도시되어 있다. 광학에서와 같이, 입사 전기 필드의 반사를 최소화하는 것은 손실성 매체(203)의 유도 표면 도파 모드로 결합되는 에너지를 향상 및/또는 최대화할 수 있다. 입사 평면(경계 계면이 아님)에 대해 평행하게 편광된 전기 필드( )에 대하여, 입사 전기 필드의 반사의 양은 다음과 같이 표현될 수 있는 Fresnel 반사 계수를 사용하여 결정될 수 있다.
)에 대하여, 입사 전기 필드의 반사의 양은 다음과 같이 표현될 수 있는 Fresnel 반사 계수를 사용하여 결정될 수 있다.
여기서 θi 는 표면 법선에 관해 측정된 통상적 입사각이다.
도 5a의 예에서, 광선 광학 해석은 표면 법선( )에 관해 측정된 θi 의 입사각을 갖는 입사 평면에 평행하게 편광된 입사 필드를 보여준다.
)에 관해 측정된 θi 의 입사각을 갖는 입사 평면에 평행하게 편광된 입사 필드를 보여준다.  일 때 입사 전기 필드의 어떠한 반사도 존재하지 않으며, 따라서 입사 전기 필드는 손실성 전도 매체(203)의 표면을 따른 유도 표면 도파 모드로 완전히 결합된다. 방정식 (25)의 분자가 0으로 진행할 때 입사각은 다음과 같아짐을 알 수 있다.
일 때 입사 전기 필드의 어떠한 반사도 존재하지 않으며, 따라서 입사 전기 필드는 손실성 전도 매체(203)의 표면을 따른 유도 표면 도파 모드로 완전히 결합된다. 방정식 (25)의 분자가 0으로 진행할 때 입사각은 다음과 같아짐을 알 수 있다.
여기서 x=σ/ωεo이다. 이 복소 입사각(θi,B)은 브루스터 각도라 지칭된다. 방정식 (22)를 다시 참조하면, 동일한 복소 브루스터 각도(θi,B) 관계가 방정식 (22) 및 (26) 양자 모두에 존재한다는 것을 알 수 있다.
도 5a에 예시된 바와 같이, 전기 필드 벡터(E)는 입사 평면에 평행하게 편광된 유입 비균일 평면파로서 도시될 수 있다. 전기 필드 벡터(E)는 다음과 같이 독립적 수평 및 수직 성분들로부터 생성될 수 있다.
기하학적으로, 도 5a의 예시는 전기 필드 벡터(E)가 다음에 의해 주어질 수 있음을 제시한다.
이는 필드 비율이 다음과 같다는 것을 의미한다.
"파 경사"라 지칭되는 일반화된 파라미터(W)는 여기서 다음에 의해 주어지는 수직 전기 필드 성분에 대한 수평 전기 필드 성분의 비율로서 표시된다.
이는 복소수이며, 크기 및 위상 양자 모두를 갖는다. 영역 2에서의 전자기파에 대하여, 파 경사 각도(ψ)는 영역 1과의 경계 계면에서의 파면의 법선과 이 경계 계면에 대한 접선 사이의 각도와 같다. 이는 레디얼 원통형 유도 표면파에 대하여 전자기파의 등위상 표면과 그 법선들을 예시하는 도 5b에서 더 쉽게 알 수 있다. 완전 전도체와의 경계 계면(z = 0)에서, 파면 법선은 경계 계면의 접선에 평행하고 W = 0를 초래한다. 그러나, 손실성 유전체의 경우, 파면 법선이 z = 0에서 경계 계면의 접선과 평행하지 않기 때문에 파 경사(W)가 존재한다.
유도 표면파에 방정식 (30b)를 적용하면 다음이 제공된다.
복소 브루스터 각도(θi,B)와 같은 입사각에서, 방정식 (25)의 Fresnel 반사 계수는 다음에 의해 나타나는 바와 같이 사라진다.
방정식 (22)의 복소 필드 비율을 조정함으로써, 입사 필드는 반사가 감소되거나 제거되는 복소 각도에서 입사되도록 합성될 수 있다. 이러한 비율을  로 정하면 반사가 사라지게 하는 복소 브루스터 각도에서 입사되는 합성 전기 필드가 도출된다.
로 정하면 반사가 사라지게 하는 복소 브루스터 각도에서 입사되는 합성 전기 필드가 도출된다.
전기적 유효 높이의 개념은 유도 표면 도파 프로브(200)와의 복소 입사각을 갖는 전기 필드의 합성에 추가적 식견을 제공할 수 있다. 전기적 유효 높이(heff)는 hp의 물리적 높이(또는 길이)를 갖는 모노폴에 대하여 다음과 같이 정의된다.
이 방정식이 구조를 따른 소스 분포의 크기 및 위상에 의존하기 때문에, 유효 높이(또는 길이)는 일반적으로 복소수이다. 구조의 분포 전류(I(z))의 적분이 구조의 물리적 높이(hp)에 걸쳐 수행되고, 구조의 베이스(또는 입력)를 통해 상향 유동하는 그라운드 전류(I0)에 대해 정규화된다. 구조를 따른 분포 전류는 다음과 같이 표현될 수 있다.
여기서 β0는 구조 상에서 전파하는 전류를 위한 전파 인자이다. 도 3의 예에서, IC는 유도 표면 도파 프로브(200a)의 수직 구조를 따라 분포되는 전류이다.
예로서, 구조의 저부에 저 손실 코일(예를 들어, 나선형 코일)을 포함하는 급전 네트워크(209) 및 충전 단자(T1)와 코일 사이에 연결되는 수직 급전 라인 전도체를 고려한다. 코일(또는 나선형 지연 라인)에 기인한 위상 지연은 lC의 물리적 길이와 다음과 같은 전파 인자에서 θc =βplC이다.
여기서 Vf는 구조 상의 속도 인자이고, λ0는 공급된 주파수에서의 파장이며, λp는 속도 인자(Vf)로부터 초래되는 전파 파장이다. 위상 지연은 그라운드(말뚝(stake)) 전류(I0)에 대해 측정된다.
추가적으로, 수직 급전 라인 전도체의 길이(lw)를 따른 공간적 위상 지연은 수직 급전 라인 전도체를 위한 전파 위상 상수가 βw인 경우 θy =βwlw 에 의해 주어질 수 있다. 일부 구현예에서, 공간적 위상 지연은 θy =βwhp에 의해 추산되며, 그 이유는 수직 급전 라인 전도체 길이(lw)와 유도 표면 도파 프로브(200a)의 물리적 높이(hp) 사이의 차이가 공급된 주파수(λ0)에서 파장보다 매우 작기 때문이다. 결과적으로, 코일 및 수직 급전 라인 전도체를 통한 전체 위상 지연은 Φ=θc+θy 이고, 물리적 구조의 저부로부터 코일의 상단으로 공급되는 전류는 다음과 같으며,
전체 위상 지연(Φ)은 그라운드(말뚝) 전류(I0)에 대해 측정된다. 결과적으로, 유도 표면 도파 프로브(200)의 전기적 유효 높이는 물리적 높이  인 경우에 대해 다음과 같이 추산될 수 있다.
인 경우에 대해 다음과 같이 추산될 수 있다.
Φ의 각도(또는 위상 이동)에서의 모노폴의 복소 유효 높이 heff =hp는 소스 필드가 유도 표면 도파 모드에 매칭되게 하고 유도 표면파가 손실성 전도 매체(203) 상에서 발진되게 하도록 조정될 수 있다.
도 5a의 예에서, Hankel 크로스오버 거리(Rx)(121)에서 복소 브루스터 입사각(θi,B)을 갖는 입사 전기 필드(E)의 복소 각도 삼각법을 예시하기 위해 광선 광학이 사용된다. 방정식 (26)으로부터 손실성 전도 매체에 대하여 브루스터 각도가 복소수이고 다음에 의해 명시된다는 것을 상기하라.
전기적으로, 기하학적 파라미터들은 다음에 의해 충전 단자(T1)의 전기적 유효 높이(heff)에 의해 관련된다.
여기서, ψi,B =(π/2)- θi,B 는 손실성 전도 매체의 표면으로부터 측정된 브루스터 각도이다. 유도 표면 도파 모드로의 결합을 위해, Hankel 크로스오버 거리에서의 전기 필드의 파 경사는 Hankel 크로스오버 거리와 전기적 유효 높이의 비율로서 표현될 수 있다.
물리적 높이(hp)와 Hankel 크로스오버 거리(Rx) 양자 모두가 실수량이기 때문에, Hankel 크로스오버 거리(Rx)에서의 원하는 유도 표면파 경사의 각도(ψ)는 복소 유효 높이(heff)의 위상(Φ)과 같다. 이는 코일의 공급 지점에서의 위상, 그리고, 따라서, 방정식 (37)에서의 위상 이동을 변화시킴으로써, 복소 유효 높이의 위상(Φ)이 Hankel 크로스오버 지점(121)에서 유도 표면 도파 모드의 파 경사각(ψ)을 매칭시키도록 조절될 수 있다는 것을 의미한다: Φ=ψ.
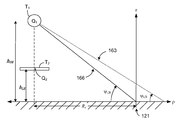
도 5a에서, 손실성 전도 매체 표면을 따른 길이(Rx)의 인접한 변과, 충전 단자(T1)와 Hankel 크로스오버 지점(121) 사이의 손실성 전도 매체 표면(127)과 충전 단자(T1)의 중심과 Rx의 Hankel 크로스오버 지점(121) 사이에서 연장하는 광선(124) 사이에서 측정된 복소 브루스터 각도(ψi,B)를 갖는 우측 삼각형이 도시되어 있다. 충전 단자(T1)가 적절한 위상 지연(Φ)을 갖는 전하로 여기되고 물리적 높이(hp)에 위치된 상태에서, 결과적 전기 필드는 브루스터 각도에서 그리고 Hankel 크로스오버 거리(Rx)에서 손실성 전도 매체 경계 계면으로 입사된다. 이들 조건 하에서, 반사 없이 또는 실질적으로 무시가능한 반사로 유도 표면 도파 모드가 여기될 수 있다.
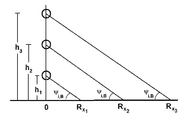
유효 높이(heff)의 위상 이동(Φ)을 변화시키지 않고 충전 단자(T1)의 물리적 높이가 감소되는 경우, 결과적 전기 필드는 유도 표면 도파 프로브(200)로부터 감소된 거리에서 브루스터 각도로 손실성 전도 매체(203)와 교차한다. 도 6은 브루스터 각도에서 전기 필드가 입사되는 거리에 대한 충전 단자(T1)의 물리적 높이를 감소시키는 것의 영향을 예시한다. 높이가 h3로부터 h2를 통해 h1으로 감소됨에 따라, 전기 필드가 브루스터 각도에서 손실성 전도 매체(예를 들어, 지구)와 교차하는 지점이 충전 단자 위치에 더 근접해진다. 그러나, 방정식 (39)이 나타내는 바와 같이, 충전 단자(T1)의 높이(H1)(도 3)는 Hankel 함수의 원위 성분을 여기시키기 위해 물리적 높이(hp) 이상이어야 한다. 충전 단자(T1)가 유효 높이(heff) 이상에 위치된 상태에서, 손실성 전도 매체(203)는 도 5a에 예시된 바와 같이 Hankel 크로스오버 거리(Rx)(121) 이상에서 브루스터 입사각(ψi,B =(π/2)- θi,B)에서 조명될 수 있다. 충전 단자(T1) 상의 속박 전하를 감소시키거나 최소화하기 위해, 높이는 전술한 바와 같이 충전 단자(T1)의 구체 직경(또는 등가 구체 직경)의 적어도 4배이어야 한다.
유도 표면 도파 프로브(200)는 복소 브루스터 각도에서 손실성 전도 매체(203)의 표면을 조명하는 파에 대응하는 파 경사를 갖는 전기 필드를 정립하고, 그에 의해, Rx의 Hankel 크로스오버 지점(121)에서(또는 그를 초과하여) 유도 도파 모드에 실질적으로 모드 매칭하는 것에 의해 레디얼 표면 전류를 여기시키도록 구성될 수 있다.
도 7을 참조하면, 충전 단자(T1)를 포함하는 유도 표면 도파 프로브(200b)의 예의 도식적 표현이 도시되어 있다. AC 소스(212)는 충전 단자(T1)를 위한 여기 소스로서 작용하고, 이는 예를 들어 나선형 코일 같은 코일(215)을 포함하는 급전 네트워크(209)(도 3)를 통해 유도 표면 도파 프로브(200b)에 결합된다. 다른 구현예에서, AC 소스(212)는 일차 코일을 통해 코일(215)에 유도식으로 결합될 수 있다. 일부 실시예에서, 코일(215)에 대한 AC 소스(212)의 결합을 개선 및/또는 최대화하기 위해 임피던스 매칭 네트워크가 포함될 수 있다.
도 7에 도시된 바와 같이, 유도 표면 도파 프로브(200b)는 손실성 전도 매체(203)에 의해 제공되는 평면에 실질적으로 수직인 수직 축(z)을 따라 위치되는 상부 충전 단자(T1)(예를 들어, 높이(hp)의 구체)를 포함할 수 있다. 제2 매체(206)는 손실성 전도 매체(203) 위에 위치된다. 충전 단자(T1)는 자기 용량(CT)을 갖는다. 동작 동안, 임의의 주어진 순간에 단자(T1)에 인가된 전압에 의존하여 단자(T1)에 전하(Q1)가 부여된다.
도 7의 예에서, 코일(215)은 제1 단부에서 그라운드 말뚝(218)에 결합되고 수직 급전 라인 전도체(221)를 통해 충전 단자(T1)에 결합된다. 일부 구현예에서, 충전 단자(T1)에 대한 코일 연결은 도 7에 도시된 바와 같이 코일(215)의 탭(tap)(224)을 사용하여 조정될 수 있다. 코일(215)은 코일(215)의 하부 부분에서 탭(227)을 통해 AC 소스(212)에 의해 동작 주파수로 에너지 공급될 수 있다. 다른 구현예에서, AC 소스(212)는 일차 코일을 통해 코일(215)에 유도식으로 결합될 수 있다.
유도 표면 도파 프로브(200)의 구성 및 조정은 다양한 동작 조건, 예컨대, 전송 주파수, 손실성 전도 매체의 조건(예를 들어, 토양 전도율(σ) 및 상대 유전율(εr)) 및 충전 단자(T1)의 크기에 기초한다. 굴절 지수는 방정식 (10) 및 (11)로부터 다음과 같이 계산될 수 있다.
여기서, x=σ/ωεo이고 ω=2πf이다. 전도율(σ) 및 상대 유전율(εr)은 손실성 전도 매체(203)의 테스트 측정을 통해 결정될 수 있다. 또한, 표면 법선을 통해 측정된 복소 브루스터 각도(θi,B)는 다음과 같이 방정식 (26)으로부터 결정될 수 있거나,
또는 다음과 같이 도 5a에 도시된 바와 같은 표면으로부터 측정될 수 있다.
Hankel 크로스오버 거리(WRx)에서의 파 경사는 또한 방정식 (40)을 사용하여 발견될 수 있다.
Hankel 크로스오버 거리는 또한 -jγρ에 대하여 방정식 (20b) 및 (21)의 크기를 같다고 놓고 도 4에 예시된 바와 같이 Rx에 대하여 푸는 것에 의해 발견될 수 있다. 전기적 유효 높이는 그후 다음과 같이 복소 브루스터 각도 및 Hankel 크로스오버 거리를 사용하여 방정식 (39)로부터 결정될 수 있다.
방정식 (44)으로부터 알 수 있는 바와 같이, 복소 유효 높이(heff)는 충전 단자(T1)의 물리적 높이(hp)와 연계된 크기 및 Hankel 크로스오버 거리(Rx)에서의 파 경사의 각도(ψ)와 연계되는 위상 지연(Φ)을 포함한다. 이들 변수 및 선택된 충전 단자(T1) 구성에서, 유도 표면 도파 프로브(200)의 구성을 결정하는 것이 가능하다.
충전 단자(T1)가 물리적 높이(hp) 이상에 위치된 상태에서, 급전 네트워크(209)(도 3) 및/또는 급전 네트워크를 충전 단자(T1)에 연결하는 수직 급전 라인은 충전 단자(T1) 상의 전하(Q1)의 위상(Φ)을 파 경사(W)의 각도(ψ)에 매칭시키도록 조정될 수 있다. 충전 단자(T1)의 크기는 단자 상에 부여되는 전하(Q1)를 위해 충분히 큰 표면을 제공하도록 선택될 수 있다. 일반적으로, 실용적으로 가능한 한 크게 충전 단자(T1)를 구성하는 것이 바람직하다. 충전 단자(T1)의 크기는 충전 단자 주변의 전기 방전 또는 스파크형성을 초래할 수 있는 주변 공기의 이온화를 피하도록 충분히 커야 한다.
나선형으로 권선된 코일의 위상 지연(θc)은 Corum, K.L. 및 J.F. Corum의 "RF Coils, Helical Resonators and Voltage Magnification by Coherent Spatial Modes"(Microwave Review, Vol. 7, No. 2, September 2001, pp. 36-45)에 설명된 바와 같이 Maxwell 방정식으로부터 결정될 수 있으며, 상기 문헌은 본 명세서에 그 전문이 참조로 통합되어 있다. H/D>1인 나선형 코일에 대하여, 광속(c) 또는 "속도 인자"에 대한 코일의 종축을 따른 파의 전파 속도(υ)의 비율은 다음에 의해 주어진다.

여기서, H는 솔레노이드 나선의 축방향 길이이고, D는 코일 직경이며, N은 코일의 권회수이고, s=H/N은 코일의 권선간 간격(또는 나선 피치)이고, λo는 자유 공간 파장이다. 이러한 관계에 기초하여, 나선형 코일의 전기적 길이 또는 위상 지연은 다음에 의해 주어진다.
나선이 나선형으로 권선되거나 짧고 뚱뚱한 경우 원리는 동일하지만 Vf 및 θc 는 경험적 측정에 의해 취득하기가 더 용이하다. 또한, 나선형 전송 라인의 특성(파) 임피던스에 대한 방정식은 다음과 같이 유도된다.
구조의 공간적 위상 지연(θy)은 수직 급전 라인 전도체(221)(도 7)의 진행 파 위상 지연을 사용하여 결정될 수 있다. 완전한 그라운드 평면 위의 원통형 수직 전도체의 용량은 다음과 같이 표현될 수 있다.
여기서 hw는 전도체의 수직 길이(또는 높이)이고, a는 반경(mks 단위)이다. 나선형 코일에서와 같이, 수직 급전 라인 전도체의 진행 파 위상 지연은 다음과 같이 주어질 수 있다.
여기서, βw는 수직 급전 라인 전도체의 전파 위상 상수이고, hw는 수직 급전 라인 전도체의 수직 길이(또는 높이)이고, Vw는 전선 상의 속도 인자이며, λ0는 공급 주파수에서의 파장이고, λw는 속도 인자(Vw)로부터 초래되는 전파 파장이다. 균일한 원통형 전도체에 대하여, 속도 인자는 Vw≒0.94인 상수이거나, 약 0.93 내지 약 0.98의 범위에 있다. 마스트(mast)가 균일한 전송 라인인 것으로 고려되는 경우, 그 평균 특성 임피던스는 다음에 의해 추산될 수 있다.
여기서, 균일한 원통형 전도체에 대하여 Vw≒0.94이고, a는 전도체의 반경이다. 단선 급전 라인의 특성 임피던스를 위해 아마츄어 무선 문헌에서 사용되어온 대안적 방정식은 다음에 의해 주어진다.
방정식 (51)은 단선 급전선에 대한 Zw는 주파수에 따라 변한다는 것을 의미한다. 위상 지연은 용량과 특성 임피던스에 기초하여 결정될 수 있다.
충전 단자(T1)가 도 3에 도시된 바와 같은 손실성 전도 매체(203) 위에 위치된 상태에서, 급전 네트워크(209)는 복소 유효 높이(heff)의 위상 이동(Φ)이 Hankel 크로스오버 거리에서의 파 경사의 각도(ψ)와 같은 또는 Φ=ψ인 상태로 충전 단자(T1)를 여기시키도록 조정될 수 있다. 이러한 조건이 충족될 때, 충전 단자(T1) 상의 전하 진동(Q1)에 의해 생성되는 전기장은 손실성 전도 매체(203)의 표면을 따라 진행하는 유도 표면 도파 모드로 결합된다. 예로서, 브루스터 각도(θi,B), 수직 급전 라인 전도체(221)(도 7)와 연계된 위상 지연(θy) 및 코일(215)(도 7)의 구성이 알려져 있는 경우, 이때, 탭(224)(도 7)의 위치는 위상 Φ=ψ인 상태로 충전 단자(T1) 상에 진동하는 전하(Q1)를 부여하도록 결정 및 조정될 수 있다. 탭(224)의 위치는 표면파를 유도 표면 도파 모드로의 진행하는 표면파의 결합을 최대화하도록 조정될 수 있다. 탭(224)의 위치를 초과한 잉여 코일 길이는 용량성 영향을 감소시키기 위해 제조될 수 있다. 수직 전선 높이 및/또는 나선형 코일의 기하학적 파라미터도 변경될 수 있다.
손실성 전도 매체(203)의 표면 상의 유도 표면 도파 모드로의 결합은 충전 단자(T1) 상의 전하(Q1)와 연계된 복소 이미지 평면에 관한 정재파 공진에 대해 유도 표면 도파 프로브(200)를 튜닝함으로써 개선 및/또는 최적화될 수 있다. 이렇게 함으로써, 유도 표면 도파 프로브(200)의 성능은 충전 단자(T1) 상에서의 증가된 및/또는 최대 전압(그리고, 이에 따라 전하(Q1))을 위해 조정될 수 있다. 도 3을 다시 참조하면, 영역 1에서의 손실성 전도 매체(203)의 영향은 이미지 이론 분석을 사용하여 검토될 수 있다.
물리적으로, 완전 전도성 평면 위에 배치된 상승된 전하(Q1)는 완전 전도성 평면 상의 자유 전하를 끌어당기고, 이는 그후 상승된 전하(Q1) 아래의 영역에 "쌓이게" 된다. 완전 전도성 평면 상의 "속박" 전기의 결과적 분포는 종-형상 곡선과 유사하다. 그 아래의 유도된 "쌓인" 전하의 전위에 더해진 상승된 전하(Q1)의 전위의 중첩은 완전 전도성 평면을 위한 제로 등전위 표면을 강요한다. 완전 전도성 표면 위의 영역에서의 필드를 설명하는 경계값 문제 해는 이미지 전하의 고전적 개념을 사용하여 얻어질 수 있으며, 여기서, 상승된 전하로부터의 필드는 완전 전도성 평면 아래의 대응하는 "이미지" 전하로부터의 필드와 중첩된다.
이러한 분석은 또한 유도 표면 도파 프로브(200) 아래의 유효 이미지 전하(Q1')의 존재를 가정함으로써 손실성 전도 매체(203)에 관하여 사용될 수 있다. 유효 이미지 전하(Q1')는 도 3에 예시된 바와 같은 전도성 이미지 그라운드 평면(130)에 대하여 충전 단자(T1) 상의 전하(Q1)와 매칭된다. 그러나, 이미지 전하(Q1')는 단순히 완전 전도체의 경우에 그러한 바와 같이 충전 단자(T1) 상의 일차 소스 전하(Q1)와 180도 위상차를 갖고 소정 실제 깊이에 위치되는 것 만은 아니다. 오히려, 손실성 전도 매체(203)(예를 들어, 지상 매체)는 위상 이동된 이미지를 제공한다. 즉, 이미지 전하(Q1')는 손실성 전도 매체(203)의 표면(또는 물리적 경계) 아래의 복소 깊이에 있다. 복소 이미지 깊이에 대한 설명에 대해서는 Wait, J. R.의 "Complex Image Theory―Revisited"(IEEE Antennas and Propagation Magazine, Vol. 33, No. 4, August 1991, pp. 27-29)를 참고하며, 이 문헌은 본 명세서에 그 전문이 참조로 통합되어 있다.
전하(Q1)의 물리적 높이(H1)와 같은 깊이에 있는 이미지 전하(Q1') 대신, 전도성 이미지 그라운드 평면(130)(완전 전도체를 나타냄)은 z=-d/2의 복소 깊이에 위치되고, 이미지 전하(Q1')는  로 주어지는 복소 깊이에서 나타난다(즉, "깊이"는 크기 및 위상 양자 모두를 갖는다). 지구 위의 수직방향으로 편광된 소스에 대하여, 다음과 같고,
로 주어지는 복소 깊이에서 나타난다(즉, "깊이"는 크기 및 위상 양자 모두를 갖는다). 지구 위의 수직방향으로 편광된 소스에 대하여, 다음과 같고,

여기서, 방정식 (12)에 나타난 바와 같이 다음과 같다.
이미지 전하의 복소 간격은 따라서 외부적 필드가 계면이 유전체 또는 완전 전도체 중 어느 하나일 때 발생하지 않는 추가적 위상 이동을 나타낸다는 것을 의미한다. 손실성 전도 매체에서, 파면 법선은 영역 1과 영역 2 사이의 경계 계면에 있지 않고 z=-d/2에서 전도성 이미지 그라운드 평면(130)의 접선과 평행하다.
손실성 전도 매체(203)가 물리적 경계(136)를 갖는 유한 전도성 지구(133)인 도 8a에 예시된 경우를 고려한다. 유한 전도성 지구(133)는 물리적 경계(136) 아래의 복소 깊이(z1)에 위치되어 있는 도 8b에 도시된 바와 같은 완전 전도성의 이미지 그라운드 평면(139)으로 대체될 수 있다. 이러한 등가의 표현은 물리적 경계(136)의 계면으로 내려다볼 때 동일한 임피던스를 나타낸다. 도 8b의 등가 표현은 도 8c에 도시된 바와 같이 등가 전송 라인으로서 모델링될 수 있다. 등가 구조의 단면은 (z-방향) 종단 장하된(end-loaded) 전송 라인으로서 표현되고, 완전 전도성의 이미지 평면의 임피던스는 단락 회로가 된다(zS=0). 깊이(z1)는 지구에서 내려다본 TEM 파 임피던스를 도 8c의 전송 라인을 볼 때 보여지는 이미지 그라운드 평면 임피던스(Zin)와 같다고 놓음으로써 결정될 수 있다.
도 8a의 경우에, 상부 영역(공기)(142)에서의 전파 상수 및 파 고유 임피던스는 다음과 같다.
손실성 지구(133)에서, 전파 상수 및 파 고유 임피던스는 다음과 같다.
수직 입사에 대해, 도 8b의 등가 표현은 그 특성 임피던스가 공기의 것(zo)이고, γo의 전파 상수를 가지며, 그 길이가 z1인 TEM 전송 라인과 등가이다. 이 때문에 도 8c의 단락된 전송 라인을 위한 계면에서 본 이미지 그라운드 평면 임피던스(Zin)는 다음에 의해 주어진다.
도 8c의 등가 모델과 연계된 이미지 그라운드 평면 임피던스(Zin)를 도 8a의 법선 입사 파 임피던스와 같다고 놓고, z1에 대해 풀면 다음과 같은 단락 회로(완전히 전도성인 이미지 그라운드 평면(139))까지의 거리가 주어진다.
역 쌍곡선 탄젠트에 대한 급수 전개의 첫 번째 항만이 이러한 근사화에 고려된다. 공기 영역(142)에서, 전파 상수는 γo=jβo이고, 그래서, Zin =jzotanβoz1 (실제 z1에 대한 순수 가상적 양임)이지만, ze는 σ ≠ 0인 경우 복소 값이다. 따라서, z1이 복소 거리인 경우에만 Zin =ze이다.
도 8b의 등가 표현이 완전히 전도성인 이미지 그라운드 평면(139)을 포함하기 때문에, 지구의 표면에 놓여지는 (물리적 경계(136)) 전하 또는 전류의 이미지 깊이는 이미지 그라운드 평면(139)의 다른 측부 상에서 거리(z1)과 동일하거나 지구의 표면(z = 0에 위치됨) 아래에서 d = 2 x z1이다. 따라서, 완전히 전도성인 이미지 그라운드 평면(139)에 대한 거리는 다음과 같이 추산될 수 있다.
추가적으로, "이미지 전하"는 실제 전하에 대해 "동일하면서 반대"이고, 그래서, 깊이 z1 = -d/2에서 완전히 전도성인 이미지 그라운드 평면(139)의 전위는 0일 것이다.
전하(Q1)가 도 3에 예시된 바와 같은 지구의 표면 위 거리(H1)로 상승되는 경우, 이때 이미지 전하(Q1')는 표면 아래 D1=d+H1의 복소 거리에 존재하거나 이미지 그라운드 평면(130) 아래 d/2+ H1의 복소 거리에 존재한다. 도 7의 유도 표면 도파 프로브(200b)는 도 8b의 완전 전도성 이미지 그라운드 평면(139)에 기초할 수 있는 등가 단선 전송 라인 이미지 평면 모델로서 모델링될 수 있다. 도 9a는 등가 단선 전송 라인 이미지 평면 모델의 예를 도시하고, 도 9b는 도 8c의 단락 전송 라인을 포함하는 등가 고전적 전송 라인 모델의 예를 예시한다.
도 9a 및 도 9b의 등가 이미지 평면 모델에서, Φ= θy + θc 는 지구(133)(또는 손실성 전도 매체(203))를 기준으로 한 유도 표면 도파 프로브(200)의 진행파 위상 지연이고, θc =βpH는 도 단위로 표현된 물리적 길이(H)의 코일(215)(도 7)의 전기적 길이이며, θy =βwhw는 도 단위로 표현된 물리적 길이(hw)의 수직 급전 라인 전도체(221)(도 7)의 전기적 길이이며, θd=βod/2는 지구(133)(또는 손실성 전도 매체(203))의 물리적 경계(136)와 이미지 그라운드 평면(139) 사이의 위상 이동이다. 도 9a 및 도 9b의 예에서, Zw는 옴단위의 상승된 수직 급전 라인 전도체(221)의 특성 임피던스이고, Zc는 옴 단위의 코일(215)의 특성 임피던스이고, zo 는 자유 공간의 특성 임피던스이다.
유도 표면 도파 프로브(200)의 베이스에서, 구조 내로 "올려다본" 관찰된 임피던스는  이다. 다음과 같은 부하 임피던스에서:
이다. 다음과 같은 부하 임피던스에서:
-여기서 CT는 충전 단자(T1)의 자기 용량임- 수직 급전 라인 전도체(221)(도 7) 내로 "올려다본" 관찰된 임피던스는 다음에 의해 주어지고:
코일(215)(도 7) 내로 "올려다본" 관찰된 임피던스는 다음에 의해 주어진다:
유도 표면 도파 프로브(200)의 베이스에서, 손실성 전도 매체(203) 내로 "아래로 본" 관찰된 임피던스는  이고, 다음에 의해 주어지며:
이고, 다음에 의해 주어지며:
여기서 zs =0이다.
손실을 무시하면, 등가 이미지 평면 모델은 물리적 경계(136)에서  일 때의 공진으로 튜닝될 수 있다. 또는, 저 손실의 경우에, 물리적 경계(136)에서
일 때의 공진으로 튜닝될 수 있다. 또는, 저 손실의 경우에, 물리적 경계(136)에서  이고, 여기서 X는 대응하는 반작용 성분이다. 따라서, 유도 표면 도파 프로브(200) 내로 "올려다본" 물리적 경계(136)에서의 임피던스는 손실성 전도 매체(203) 내로 "내려다본" 물리적 경계(136)에서의 임피던스의 켤레이다. Φ=ψ이도록 매체의 파 경사각(ψ)과 동일한 진행파 위상 지연(Φ)을 유지하면서-이는 손실성 전도 매체(203)(예컨대, 지구)의 표면을 따른 유도 표면 도파 모드에 대한 프로브의 전기 필드의 결합을 개선 및/또는 최대화함- 충전 단자(T1)의 부하 임피던스(ZL)를 조정함으로써, 도 9a 및 도 9b의 등가 이미지 평면 모델은 이미지 그라운드 평면(139)에 관하여 공진하도록 튜닝될 수 있다. 이러한 방식으로, 등가 복소 이미지 평면 모델의 임피던스는 순수히 저항성이고, 이는 프로브 구조 상의 중첩된 정재파를 유지하며, 이는 단자(T1) 상의 전압 및 상승된 전하를 최대화하고 방정식 (1)-(3) 및 (16)에 의해 전파 표면파를 최대화한다.
이고, 여기서 X는 대응하는 반작용 성분이다. 따라서, 유도 표면 도파 프로브(200) 내로 "올려다본" 물리적 경계(136)에서의 임피던스는 손실성 전도 매체(203) 내로 "내려다본" 물리적 경계(136)에서의 임피던스의 켤레이다. Φ=ψ이도록 매체의 파 경사각(ψ)과 동일한 진행파 위상 지연(Φ)을 유지하면서-이는 손실성 전도 매체(203)(예컨대, 지구)의 표면을 따른 유도 표면 도파 모드에 대한 프로브의 전기 필드의 결합을 개선 및/또는 최대화함- 충전 단자(T1)의 부하 임피던스(ZL)를 조정함으로써, 도 9a 및 도 9b의 등가 이미지 평면 모델은 이미지 그라운드 평면(139)에 관하여 공진하도록 튜닝될 수 있다. 이러한 방식으로, 등가 복소 이미지 평면 모델의 임피던스는 순수히 저항성이고, 이는 프로브 구조 상의 중첩된 정재파를 유지하며, 이는 단자(T1) 상의 전압 및 상승된 전하를 최대화하고 방정식 (1)-(3) 및 (16)에 의해 전파 표면파를 최대화한다.
Hankel 해로부터 유도 표면 도파 프로브(200)에 의해 여기된 유도 표면파는 외향 전파 진행파라는 것을 알 수 있다. 유도 표면 도파 프로브(200)의 그라운드 말뚝(218)(도 3 및 도 7)과 충전 단자(T1) 사이의 급전 네트워크(209)를 따른 소스 분배는 실제로 구조 상의 정재파와 진행파를 더한 중첩으로 구성된다. 물리적 높이(hp)에 또는 그 위에 충전 단자(T1)가 위치된 상태에서, 급전 네트워크(209)를 통해 이동하는 진행파는 손실성 전도 매체(203)와 연계된 파 경사각에 매칭된다. 이러한 모드 매칭은 손실성 전도 매체(203)를 따라 진행파가 발진될 수 있게 한다. 진행파에 대해 위상 지연이 정립되고 나면, 충전 단자(T1)의 부하 임피던스(ZL)는 프로브 구조가 -d/2의 복소 깊이인 이미지 그라운드 평면(도 3의 130 또는 도 8의 139)에 관한 정재파 공진상태가 되게 하도록 조정된다. 이 경우, 이미지 그라운드 평면으로부터 본 임피던스는 제로 리액턴스를 가지고, 충전 단자(T1) 상의 전하는 최대화된다.
진행파 현상과 정재파 현상 사이의 구분은 (1) 길이(d)의 전송 라인의 섹션(때때로 "지연 라인"이라 지칭됨) 상의 진행파의 위상 지연(θ=βd)이 전파 시간 지연에 기인하는 반면 (2) 정재파(순방향 전파파와 역방향 전파파로 구성됨)의 위치 의존성 위상은 상이한 특성 임피던스의 라인 섹션 사이의 계면에서의 임피던스 전이와 라인 길이 전파 시간 지연 양자 모두에 의존한다는 점이다. 사인곡선형 정상 상태(steady-state)에서 동작하는 전송 라인의 섹션의 물리적 길이에 기인하여 발생하는 위상 지연에 추가로, Zoa/Zob의 비율에 기인한 임피던스 불연속부에서의 추가적 반사 계수 위상이 존재하며, 여기서 Zoa 및 Zob는 예를 들어 특성 임피던스 Zoa=Zc의 나선형 코일 섹션(도 9b) 및 특성 임피던스 Zob=Zw의 수직 급전 라인 전도체의 직선 섹션(도 9b) 같은 전송 라인의 두개의 섹션의 특성 임피던스이다.
이러한 현상의 결과로서, 매우 다른 특성 임피던스의 두 개의 비교적 짧은 전송 라인 섹션이 매우 큰 위상 이동을 제공하기 위해 사용될 수 있다. 예로서, 하나는 저 임피던스이고 하나는 고 임피던스이며 함께 합쳐서 말하자면 0.05 λ의 물리적 길이를 갖는 전송 라인의 두 개의 섹션으로 구성된 프로브 구조가 제조되어 0.25 λ 공진과 등가인 90°의 위상 이동을 제공한다. 이는 특성 임피던스의 큰 점프에 기인한다. 이러한 방식으로, 물리적으로 짧은 프로브 구조는 조합된 두 개의 물리적 길이보다 전기적으로 더 길 수 있다. 임피던스 비율의 불연속성이 위상의 큰 점프를 제공하는 도 9a 및 도 9b에 예시되어 있다. 임피던스 불연속성은 상당한 위상 이동을 제공하고, 여기서 섹션들은 함께 결합되어 있다.
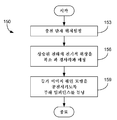
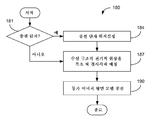
도 10을 참조하면, 유도 표면 도파 프로브(200)(도 3 및 도 7)를 손실성 전도 매체의 표면 상의 유도 표면 도파 모드에 실질적으로 모드 매칭되도록 조정하는 예를 예시하는 흐름도(150)가 도시되어 있으며, 이는 손실성 전도 매체(203)를 따른 유도 표면 진행파를 발진시킨다(도 3). 153에서 시작하여, 유도 표면 도파 프로브(200)의 충전 단자(T1)는 손실성 전도 매체(203) 위의 규정된 높이에 위치된다. 손실성 전도 매체(203)의 특성 및 유도 표면 도파 프로브(200)의 동작 주파수를 사용하여, Hankel 크로스오버 거리는 또한 -jγρ에 대한 방정식 (20b) 및 (21)의 크기를 같다고 놓고 도 4에 예시된 바와 같이 Rx에 대해 푸는 것에 의해 찾아질 수 있다. 복소 굴절 지수(n)는 방정식 (41)을 사용하여 결정될 수 있고, 복소 브루스터 각도(θi,B)는 그후 방정식 (42)로부터 결정될 수 있다. 충전 단자(T1)의 물리적 높이(hp)는 그후 방정식 (44)로부터 결정될 수 있다. 충전 단자(T1)는 Hankel 함수의 원위 성분을 여기하기 위해 물리적 높이(hp) 이상이어야 한다. 이러한 높이 관계는 초기에 표면파 발진시 고려된다. 충전 단자(T1) 상의 속박 전하를 감소시키거나 최소화하기 위해, 높이는 충전 단자(T1)의 구체 직경(또는 등가 구체 직경)의 적어도 4배이어야 한다.
156에서, 충전 단자(T1) 상의 상승된 전하(Q1)의 전기적 위상 지연(Φ)은 복소 파 경사각(ψ)에 매칭된다. 나선형 코일의 위상 지연(θc) 및/또는 수직 급전 라인 전도체의 위상 지연(θy)은 파 경사(W)의 각도(ψ)와 Φ가 같아지게 하도록 조정될 수 있다. 방정식 (31)에 기초하여, 파 경사의 각도(ψ)는 아음으로부터 결정될 수 있다.
전기적 위상(Φ)은 그후 파 경사 각도에 매칭될 수 있다. 이러한 각도(또는 위상) 관계는 다음에 표면파 발진시 고려된다. 예로서, 전기적 위상 지연(Φ= θc + θy)은 수직 급전 라인 전도체(221)(도 7)의 길이(또는 높이) 및/또는 코일(215)(도 7)의 기하학적 파라미터를 변경함으로써 조정될 수 있다. Φ=ψ로 매칭시킴으로써, 전기적 필드는 표면 도파 모드를 여기시키고 손실성 전도 매체(203)를 따른 진행파를 발진시키기 위해 경계 계면에서 복소 브루스터 각도로 Hankel 크로스오버 거리(Rx)에 또는 그를 초과하여 형성될 수 있다.
다음에, 159에서, 충전 단자(T1)의 부하 임피던스는 유도 표면 도파 프로브(200)의 등가 이미지 평면 모델을 공진시키도록 튜닝된다. 도 9a 및 도 9b의 전도성 이미지 그라운드 평면(139)(또는 도 3의 130)의 깊이(d/2)는 방정식 (52), (53) 및 (54)와 측정될 수 있는 손실성 전도 매체(203)(예를 들어, 지구)의 값을 사용하여 결정될 수 있다. 해당 깊이를 사용하여, 손실성 전도 매체(203)의 물리적 경계(136)와 이미지 그라운드 평면(139) 사이의 위상 이동(θd)은 θd =βod/2를 사용하여 결정될 수 있다. 그후, 손실성 전도 매체(203) 내로 "내려다본" 관찰된 바와 같은 임피던스(Zin)는 방정식 (65)를 사용하여 결정될 수 있다. 이러한 공진 관계는 발진된 표면파를 최대화하기 위해 고려될 수 있다.
코일(215)의 조정된 파라미터와 수직 급전 라인 전도체(221)의 길이에 기초하여, 속도 인자, 위상 지연 및 코일(215)과 수직 급전 라인 전도체(221)의 임피던스가 방정식 (45) 내지 (51)을 사용하여 결정될 수 있다. 추가적으로, 충전 단자(T1)의 자기 용량(CT)은 예를 들어 방정식 (24)를 사용하여 결정될 수 있다. 코일(215)의 전파 인자(βp)는 방정식 (35)를 사용하여 결정될 수 있고, 수직 급전 라인 전도체(221)를 위한 전파 위상 상수(βw)는 방정식 (49)를 사용하여 결정될 수 있다. 수직 급전 라인 전도체(221)와 코일(215)의 결정된 값 및 자기 용량을 사용하여, 코일(215) 내로 "올려다본" 관찰된 바와 같은 유도 표면 도파 프로브(200)의 임피던스(Zbase)는 방정식 (62), (63) 및 (64)를 사용하여 결정될 수 있다.
유도 표면 도파 프로브(200)의 등가 이미지 평면 모델은 Zbase의 리액턴스 성분(Xbase)이 Zin 의 리액턴스 성분(Xin)을 소거하도록 또는 Xbase + Xin =0이도록 부하 임피던스(ZL)를 조정하는 것에 의해 공진에 대해 튜닝될 수 있다. 따라서, 유도 표면 도파 프로브(200) 내로 "올려다본" 물리적 경계(136)에서의 임피던스는 손실성 전도 매체(203) 내로 "내려다본" 물리적 경계(136)에서의 임피던스의 켤레이다. 부하 임피던스(ZL)는 충전 단자(T1)의 전기적 위상 지연(Φ= θc + θy)을 변화시키지 않고 충전 단자(T1)의 용량(CT)을 변화시킴으로써 조정될 수 있다. 전도성 이미지 그라운드 평면(139)(또는 130)에 관한 등가 이미지 평면 모델의 공진을 위한 부하 임피던스(ZL)를 튜닝하기 위해 반복 접근법이 수행될 수 있다. 이러한 방식으로 손실성 전도 매체(203)(예를 들어, 지구)의 표면을 따른 유도 표면 도파 모드에 대한 전기적 필드의 결합이 개선 및/또는 최대화될 수 있다.
이는 수치적 예를 갖는 상황을 예시함으로써 더 양호하게 이해될 수 있다. 상단에 충전 단자(T1)를 갖는 물리적 높이(hp)의 상단 부하형 수직 스터브를 포함하는 유도 표면 도파 프로브(200)를 고려하고, 여기서, 충전 단자(T1)는 1.85 MHz의 동작 주파수(fo)에서 수직 급전 라인 전도체와 나선형 코일을 통해 여기된다. 16 피트의 높이(H1) 및 εr=15의 상대 유전율과 σ1=0.010 mhos/m의 전도율을 갖는 손실성 전도 매체(203)(예를 들어, 지구)에서, 몇몇 표면파 전파 파라미터가 fo =1.850 MHz에 대해 계산될 수 있다. 이들 조건 하에서, Hankel 크로스오버 거리는 hp=5.5 feet의 물리적 높이에서 Rx=54.5 feet가 되는 것으로 판명되고, 이는 충전 단자(T1)의 실제 높이보다 매우 아래이다. H1 = 5.5 feet의 충전 단자 높이가 사용되었지만, 더 높은 프로브 구조는 결합 용량을 감소시켜 충전 단자(T1) 상의 자유 전하의 더 큰 백분율을 허용함으로써 더 큰 필드 강도와 진행파의 여기를 제공한다.
파 길이는 다음과 같이 결정될 수 있다:
여기서, c는 광속이다. 복소 굴절 지수는 방정식 (41)로부터 다음과 같으며:
여기서, ω=2πfo 에서 x=σ1/ωεo이고, 복소 브루스터 각은 방정식 (42)로부터 다음과 같다:
방정식 (66)을 사용하여, 파 경사 값은 다음이 되도록 결정될 수 있다:
따라서, 나선형 코일은 매칭되도록 조정될 수 있다 Φ=ψ=40.614°.
수직 급전 라인 전도체(0.27 인치의 직경을 갖는 균일한 원통형 전도체로 가정됨)의 속도 인자는 Vw≒0.93로서 주어질 수 있다.  이기 때무에, 수직 급전 라인 전도체를 위한 전파 위상 상수는 다음과 같이 추산될 수 있다:
이기 때무에, 수직 급전 라인 전도체를 위한 전파 위상 상수는 다음과 같이 추산될 수 있다:
방정식 (49)로부터 수직 급전 라인 전도체의 위상 지연은 다음과 같다:
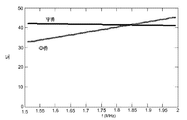
θc =28.974°=40.614°-11.640°이 되도록 나선형 코일의 위상 지연을 조정함으로써, Φ는 유도 표면 도파 모드에 매칭되도록 ψ와 같을 것이다. Φ와 ψ 사이의 관계를 예시하기 위해, 도 11은 주파수 범위에 걸친 양자의 플롯을 도시한다. Φ 및 ψ 양자 모두가 주파수 의존성이기 때문에, 그 각각의 곡선이 대략 1.85 MHz에서 서로 크로스오버되는 것을 볼 수 있다.
0.0881 인치의 전도체 직경, 30 인치의 코일 직경(D) 및 4 인치의 권선간 간격(s)을 갖는 나선형 코일에 대하여, 코일을 위한 속도 인자는 방정식 (45)를 사용하여 다음과 같이 결정될 수 있다:

그리고, 방정식 (35)로부터 전파 인자는 다음과 같다:
θc =28.974°에서, 솔레노이드 나선(H)의 축방향 길이는 다음이 되도록 방정식 (46)을 사용하여 결정될 수 있다:

이러한 높이는 수직 급전 라인 전도체가 연결되어 8.818 권선(N=H/s)을 갖는 코일을 초래하는 나선형 코일 상의 위치를 결정한다.
파 경사각과 매칭되도록 조정된 수직 급전 라인 전도체 및 코일의 진행파 위상 지연(Φ= θc + θy =ψ)에서, 충전 단자(T1)의 부하 임피던스(ZL)는 유도 표면 도파 프로브(200)의 등가 이미지 평면 모델의 정재파 공진에 대해 조정될 수 있다. 측정된 유전율, 전도율 및 지구의 유전율로부터, 방정식 (57)을 사용하여 레디얼 전파 상수가 결정될 수 있다.
그리고, 전도성 이미지 그라운드 평면의 복소 깊이가 방정식 (52)로부터 다음과 같이 추산될 수 있으며:
여기서 지구의 물리적 경계와 전도성 이미지 그라운드 평면 사이의 대응 위상 이동은 다음에 의해 주어진다:
방정식 (65)를 사용하여, 손실성 전도 매체(203)(즉, 지구) 내로 "내려다본" 관찰된 임피던스는 다음과 같이 결정될 수 있다:
유도 표면 도파 프로브(200) 내로 "올려다본" 관찰된 반작용 성분(Xbase)과 손실성 전도 매체(203) 내로 "내려다본" 관찰된 반작용 성분(Xin)을 매칭시킴으로써 유도 표면 도파 모드로의 결합은 최대화될 수 있다. 이는 수직 급전 라인 전도체와 코일의 진행파 위상 지연을 변경하지 않고 충전 단자(T1)의 용량을 조정함으로써 달성될 수 있다. 예로서, 충전 단자 용량(CT)을 61.8126 pF로 조정함으로써 방정식 (62)로부터의 부하 임피던스는 다음과 같아지고:
경계에서의 반작용 성분은 매칭된다.
방정식 (51)을 사용하여, 수직 급전 라인 전도체 0.27 인치의 직경(2a)을 가짐)의 임피던스는 다음과 같이 주어지고,
수직 급전 라인 전도체 내로 "올려다본" 관찰된 임피던스는 방정식 (63)에 의해 다음과 같이 주어진다.
방정식 (47)을 사용하여, 나선형 코일의 특성 임피던스는 다음과 같이 주어지고,
베이스에서 코일 내로 "올려다본" 관찰된 임피던스는 방정식 (64)에 의해 다음과 같이 주어진다.
방정식 (79)의 해에 비교할 때, 반작용 성분은 반대이고 대략 동일하며 따라서 서로 켤레라는 것을 알 수 있다. 따라서, 완전 전도성 이미지 그라운드 평면으로부터 도 9a 및 도 9b의 등가 이미지 평면 모델 내로 "올려다본" 관찰된 임피던스(Zip)는 단지 저항성이거나 Zip=R+j0이다.
유도 표면 도파 프로브(200)(도 3)에 의해 생성된 전기적 필드가 파 경사각에 급전 네트워크의 진행파 위상 지연을 매칭시킴으로써 정립되고 프로브 구조가 복소 깊이 z=-d/2의 완전 전도성 이미지 그라운드 평면에 관해 공진되는 경우, 필드는 손실성 전도 매체의 표면 상의 유도 표면 도파 모드에 실질적으로 모드 매칭되고, 유도 표면 진행파가 손실성 전도 매체의 표면을 따라 발진된다. 도 1에 예시된 바와 같이, 유도 전자기 필드의 유도 필드 강도 곡선(103)은  의 특성적 지수적 감쇠를 가지고, 로그-로그 스케일에서 뚜렷한 굴곡형상(109)을 나타낸다.
의 특성적 지수적 감쇠를 가지고, 로그-로그 스케일에서 뚜렷한 굴곡형상(109)을 나타낸다.
요약하면, 분석적 및 경험적 양자 모두에서, 유도 표면 도파 프로브(200)의 구조 상의 진행파 성분은 표면 진행파의 파 경사의 각도(ψ)와 매칭되는(Φ=ψ) 그 상부 단자에서의 위상 지연(Φ)을 갖는다. 이러한 조건 하에서, 표면 도파로는 "모드 매칭된" 것으로 고려될 수 있다. 또한, 유도 표면 도파 프로브(200)의 구조 상의 공진 정재파 성분은 단자(T1)에서 VMAX과 이미지 평면(139)(도 8b)에서 하방 VMIN을 가지며, 여기서, 손실성 전도 매체(203)(도 8b)의 물리적 경계(136)에서의 연결부 에서가 아니라 z=-d/2의 복소 깊이에서 Zip =Rip+j0이다. 마지막으로, 충전 단자(T1)는 도 3의 충분한 높이(H1)로 이루어지며( ), 그래서, 복소 브루스터 각도에서 손실성 전도 매체(203) 상으로 입사되는 전자기파는
), 그래서, 복소 브루스터 각도에서 손실성 전도 매체(203) 상으로 입사되는 전자기파는  항이 우세한 거리(≥Rx)에서 그렇게 된다. 무선 전송 및/또는 전력 전달 시스템을 이행하도록 하나 이상의 유도 표면 도파 프로브와 함께 수신 회로가 사용될 수 있다.
항이 우세한 거리(≥Rx)에서 그렇게 된다. 무선 전송 및/또는 전력 전달 시스템을 이행하도록 하나 이상의 유도 표면 도파 프로브와 함께 수신 회로가 사용될 수 있다.
도 3을 다시 참조하면, 유도 표면 도파 프로브(200)의 동작은 유도 표면 도파 프로브(200)와 연계된 동작 조건의 변동에 대해 조정되도록 제어될 수 있다. 예로서, 적응성 프로브 제어 시스템(230)이 사용되어 유도 표면 도파 프로브(200)의 동작을 제어하기 위해 급전 네트워크(209) 및/또는 충전 단자(T1)를 제어할 수 있다. 동작 조건은 손실성 전도 매체(203)의 특성의 변동(예를 들어, 전도율(σ) 및 상대 유전율(εr)), 필드 강도의 변동 및/또는 유도 표면 도파 프로브(200)의 부하의 변동을 포함할 수 있지만 이에 한정되지는 않는다. 방정식 (31), (41) 및 (42)로부터 볼 수 있는 바와 같이, 굴절 지수(n), 복소 브루스터 각도(θi,B) 및 파 경사( )는 예를 들어 기후 조건으로부터 초래되는 토양 전도율 및 유전율의 변화에 의해 영향을 받을 수 있다.
)는 예를 들어 기후 조건으로부터 초래되는 토양 전도율 및 유전율의 변화에 의해 영향을 받을 수 있다.
예를 들어 전도율 측정 프로브, 유전율 센서, 그라운드 파라미터 측정기, 필드 측정기, 전류 모니터 및/도는 부하 수신기 같은 장비가 사용되어 동작 조건의 변화를 모니터링하고 적응성 프로브 제어 시스템(230)에 현재 동작 조건에 대한 정보를 제공할 수 있다. 프로브 제어 시스템(230)은 그후 유도 표면 도파 프로브(200)를 위한 지정된 동작 조건을 유지하기 위해 유도 표면 도파 프로브(200)에 대한 하나 이상의 조정을 수행할 수 있다. 예로서, 습기 및 온도가 변함에 따라, 토양의 전도율이 또한 변할 것이다. 전도율 측정 프로브 및/또는 유전율 센서가 유도 표면 도파 프로브(200) 주변의 다수의 장소에 위치될 수 있다. 일반적으로, 동작 주파수에 대하여 Hankel 크로스오버 거리(Rx)에서 또는 그 주변에서 전도율 및/또는 유전율을 모니터링하는 것이 바람직하다. 전도율 측정 프로브 및/또는 유전율 센서가 유도 표면 도파 프로브(200) 주변의 다수의 장소에(예를 들어, 각 사분역 내에) 위치될 수 있다.
전도율 측정 프로브 및/또는 유전율 센서는 주기적 기반으로 전도율 및/또는 유전율을 평가하고 프로브 제어 시스템(230)에 정보를 통신하도록 구성될 수 있다. 이 정보는 LAN, WLAN, 셀룰러 네트워크 또는 다른 적절한 유선 또는 무선 통신 네트워크 같은, 그러나, 이에 한정되지 않는 네트워크를 통해 프로브 제어 시스템(230)에 통신될 수 있다. 감시된 전도율 및/도는 유전율에 기초하여, 프로브 제어 시스템(230)은 굴절 지수(n)의 변동, 복소 브루스터 각도(θi,B) 및/또는 파 경사( )를 평가하고, 파 경사각(ψ)과 같은 급전 네트워크(209)의 위상 지연(Φ)을 유지하고 및/또는 유도 표면 도파 프로브(200)의 등가 이미지 평면 모델의 공진을 유지하기 위해 유도 표면 도파 프로브(200)를 조정할 수 있다. 이는 예를 들어, θy, θc 및/또는 CT를 조정함으로서 달성될 수 있다. 예로서, 프로브 제어 시스템(230)은 그 최대치로 또는 그 부근으로 유도 표면파의 전기적 발진 효율을 유지하기 위해 충전 단자(T1)에 인가된 위상 지연(θy, θc) 및/또는 충전 단자(T1)의 자기 용량을 조정할 수 있다. 예로서, 충전 단자(T1)의 자기 용량은 단자의 크기 변경에 의해 변화될 수 있다. 전하 분포는 또한 충전 단자(T1)의 크기를 증가시킴으로써 개선될 수 있고, 이러한 크기 증가는 충전 단자(T1)로부터의 전기 방전의 기회를 감소시킬 수 있다. 다른 실시예에서, 충전 단자(T1)는 부하 임피던스(ZL)를 변화시키도록 조정될 수 있는 가변 인덕턴스를 포함할 수 있다. 충전 단자(T1)에 인가된 위상은 코일(215)(도 7) 상의 탭 위치를 변경함으로써 및/또는 코일(215)을 따라 복수의 사전규정된 탭을 포함하고 다양한 사전규정된 탭 위치들 사이에서 절환함으로써 발진 효율을 최대화하도록 조정될 수 있다.
)를 평가하고, 파 경사각(ψ)과 같은 급전 네트워크(209)의 위상 지연(Φ)을 유지하고 및/또는 유도 표면 도파 프로브(200)의 등가 이미지 평면 모델의 공진을 유지하기 위해 유도 표면 도파 프로브(200)를 조정할 수 있다. 이는 예를 들어, θy, θc 및/또는 CT를 조정함으로서 달성될 수 있다. 예로서, 프로브 제어 시스템(230)은 그 최대치로 또는 그 부근으로 유도 표면파의 전기적 발진 효율을 유지하기 위해 충전 단자(T1)에 인가된 위상 지연(θy, θc) 및/또는 충전 단자(T1)의 자기 용량을 조정할 수 있다. 예로서, 충전 단자(T1)의 자기 용량은 단자의 크기 변경에 의해 변화될 수 있다. 전하 분포는 또한 충전 단자(T1)의 크기를 증가시킴으로써 개선될 수 있고, 이러한 크기 증가는 충전 단자(T1)로부터의 전기 방전의 기회를 감소시킬 수 있다. 다른 실시예에서, 충전 단자(T1)는 부하 임피던스(ZL)를 변화시키도록 조정될 수 있는 가변 인덕턴스를 포함할 수 있다. 충전 단자(T1)에 인가된 위상은 코일(215)(도 7) 상의 탭 위치를 변경함으로써 및/또는 코일(215)을 따라 복수의 사전규정된 탭을 포함하고 다양한 사전규정된 탭 위치들 사이에서 절환함으로써 발진 효율을 최대화하도록 조정될 수 있다.
필드 또는 필드 강도(FS) 측정기는 유도 표면파와 연계된 필드의 필드 강도를 측정하기 위해 유도 표면 도파 프로브(200) 주변에 분포될 수 있다. 필드 또는 FS 측정기는 필드 강도 및/또는 필드 강도(예를 들어, 전기적 필드 강도)의 변화를 검출하고 해당 정보를 프로브 제어 시스템(230)에 통신하도록 구성될 수 있다. 이 정보는 LAN, WLAN, 셀룰러 네트워크 또는 다른 적절한 통신 네트워크 같은, 그러나, 이에 한정되지 않는 네트워크를 통해 프로브 제어 시스템(230)에 통신될 수 있다. 부하 및/또는 환경 조건이 동작 동안 변경되거나 변하기 때문에, 유도 표면 도파 프로브(200)는 수신기 및 그들이 급전하는 부하로의 적절한 전력 전송을 보증하기 위해 FS 측정기 위치에서 지정된 필드 강도(들)을 유지하도록 조정될 수 있다.
예로서, 충전 단자(T1)에 인가된 위상 지연(Φ= θy + θc)은 파 경사각(ψ)을 매칭시키도록 조정될 수 있다. 하나 또는 양자 모두의 위상 지연을 조정함으로써, 유도 표면 도파 프로브(200)는 파 경사가 복소 브루스터 각도에 대응하는 것을 보증하도록 조정될 수 있다. 이는 충전 단자(T1)에 공급되는 위상 지연을 변경하도록 코일(215)(도 7) 상의 탭 위치를 조정함으로써 달성될 수 있다. 충전 단자(T1)에 공급되는 전압 레벨이 또한 전기적 필드 강도를 조정하기 위해 증가 또는 감소될 수 있다. 이는 급전 네트워크(209)를 조정 또는 재구성하는 것에 의해 또는 여기 소스(212)의 출력 전압을 조정하는 것에 의해 달성될 수 있다. 예로서, AC 소스(212)를 위한 탭(227)(도 7)의 위치는 충전 단자(T1)에 의해 관찰되는 전압을 증가시키기 위해 조정될 수 있다. 필드 강도 레벨을 사전규정된 범위 이내로 유지하는 것은 수신기에 의한 결합을 향상시키고, 그라운드 전류 손실을 감소시키며, 다른 유도 표면 도파 프로브(200)로부터의 전송과의 간섭을 회피할 수 있다.
프로브 제어 시스템(230)은 하드웨어, 펌웨어, 하드웨어에 의해 실행되는 소프트웨어 또는 그 조합에 의해 구현될 수 있다. 예로서, 프로브 제어 시스템(230)은 프로세서와 메모리를 포함하는 처리 회로를 포함할 수 있고, 프로세서와 메모리 양자 모두는 예로서 본 기술 분야의 숙련자가 알 수 있는 바와 같은 동반되는 제어/어드레스 버스와 함께 데이터 버스 같은 로컬 인터페이스에 결합될 수 있다. 프로브 제어 애플리케이션은 모니터링된 조건에 기초하여 유도 표면 도파 프로브(200)의 동작을 조정하기 위해 프로세서에 의해 실행될 수 있다. 프로브 제어 시스템(230)은 또한 다양한 모니터링 디바이스와의 통신을 위한 하나 이상의 네트워크 인터페이스를 포함할 수 있다. 통신은 LAN, WLAN, 셀룰러 네트워크 또는 다른 적절한 통신 네트워크 같은, 그러나, 이에 한정되지 않는 네트워크를 통할 수 있다. 프로브 제어 시스템(230)은 예로서 서버, 데스크탑 컴퓨터, 랩탑 또는 유사한 기능을 갖는 다른 시스템 같은 컴퓨터 시스템을 포함할 수 있다.
도 5a의 예를 다시 참조하면, Hankel 크로스오버 거리(Rx)에서 복소 브루스터 각도(θi,B)를 갖는 충전 단자(T1)의 입사 전기적 필드(E)의 광선 광학 해석을 위한 복소 각도 삼각법이 도시되어 있다. 손실성 전도 매체에 대하여 브루스터 각도는 복소수이고 방정식 (38)에 의해 특정된다는 것을 상기하라. 전기적으로, 기하학적 파라미터들은 방정식 (39)에 의해 충전 단자(T1)의 전기적 유효 높이(heff)에 의해 관련된다. 물리적 높이(hp)와 Hankel 크로스오버 거리(Rx) 양자 모두가 실수량이기 때문에, Hankel 크로스오버 거리(Rx)에서의 원하는 유도 표면파 경사의 각도(WRx)는 복소 유효 높이(heff)의 위상(Φ)과 같다. 충전 단자(T1)가 적절한 위상(Φ)을 갖는 전하로 여기되고 물리적 높이(hp)에 위치된 상태에서, 결과적 전기 필드는 브루스터 각도에서 그리고 Hankel 크로스오버 거리(Rx)에서 손실성 전도 매체 경계 계면으로 입사된다. 이들 조건 하에서, 반사 없이 또는 실질적으로 무시가능한 반사로 유도 표면 도파 모드가 여기될 수 있다.
그러나, 방정식 (39)는 유도 표면 도파 프로브(200)의 물리적 높이가 비교적 작을 수 있다는 것을 의미한다. 이것이 유도 표면 도파 모드를 여기할 것이지만, 이는 미소한 자유 전하로 부적합하게 많은 속박 전하를 초래할 수 있다. 보상을 위해, 충전 단자(T1)는 자유 전하의 양을 증가시키기 위해 적절한 고도로 상승될 수 있다. 일 예의 경험 법칙으로서, 충전 단자(T1)는 충전 단자(T1)의 유효 직경의 대략 4-5 배(또는 그 이상)의 고도에 위치될 수 있다. 도 6은 도 5a에 도시된 물리적 높이(hp)를 초과하여 충전 단자(T1)를 상승시킨 효과를 예시한다. 증가된 고도는 손실성 전도 매체로 파 경사가 입사되는 거리를 Hankel 크로스오버 지점(121)(도 5a)을 초과하여 이동시킨다. 유도 표면 도파 모드에의 결합을 향상시키고 따라서 유도 표면파의 더 큰 발진 효율을 제공하기 위해, 하부 보상 단자(T2)가 사용되어 Hankel 크로스오버 거리에서의 파 경사가 브루스터 각도에 있게 되도록 충전 단자(T1)의 전체 유효 높이(hTE)를 조정할 수 있다.
도 12를 참조하면, 손실성 전도 매체(203)에 의해 제공되는 평면에 수직인 수직 축(z)을 따라 배열된 상승된 충전 단자(T1) 및 하부 보상 단자(T2)를 포함하는 유도 표면 도파 프로브(200c)의 일 예가 도시되어 있다. 이에 관하여, 충전 단자(T1)는 보상 단자(T2)의 직접적 위쪽에 배치되지만, 둘 이상의 전하 및/또는 보상 단자(TN)의 소정의 다른 배열이 사용되는 것이 가능하다. 유도 표면 도파 프로브(200c)는 본 개시내용의 일 실시예에 따른 손실성 전도 매체(203) 위에 배치된다. 손실성 전도 매체(203)는 영역 1을 구성하고, 제2 매체(206)는 영역 2를 구성하며, 손실성 전도 매체(203)와 경계 계면을 공유한다.
유도 표면 도파 프로브(200c)는 충전 단자(T1)와 보상 단자(T2)에 여기 소스(212)를 결합하는 급전 네트워크(209)를 포함한다. 다양한 실시예에 따라서, 임의의 주어진 순간에 단자(T1, T2)에 인가된 전압에 따라서 각각의 전하 및 보상 단자(T1, T2) 상에 전하(Q1, Q2)가 부여될 수 있다. I1은 단자 리드를 통해 충전 단자(T1) 상의 전하(Q1)를 공급하는 전도 전류이고, I2는 단자 리드를 통해 보상 단자(T2) 상에 전하(Q2)를 공급하는 전도 전류이다.
도 12의 실시예에 따라, 충전 단자(T1)는 물리적 높이(H1)에서 손실성 전도 매체(203) 위에 위치되고, 보상 단자(T2)는 물리적 높이(H2)에서 수직 축(z)을 따라 T1 직접적 아래쪽에 위치되며, H2는 H1보다 작다. 전송 구조의 높이(h)는 h = H1 - H2로서 계산될 수 있다. 충전 단자(T1)은 격리(또는 자기) 용량(C1)을 가지고, 보상 단자(T2)는 격리(또는 자기) 용량(C2)를 갖는다. 단자(T1, T2) 사이에는 그 사이의 거리에 따라 상호 용량(CM)도 존재할 수 있다. 동작 동안, 임의의 주어진 순간에 충전 단자(T1) 및 보상 단자(T2)에 인가되는 전압에 따라서 전하(Q1, Q2)가 충전 단자(T1)와 보상 단자(T2)에 각각 부여된다.
다음에 도 13을 참조하면, 도 12의 보상 단자(T2)와 충전 단자(T1) 상의 상승된 전하(Q1)에 의해 생성되는 효과의 광선 광학 해석이 도시되어 있다. 라인 163으로 예시된 바와 같이 Hankel 크로스오버 지점(121)보다 큰 거리에서 브루스터 각도로 손실성 전도 매체와 광선이 교차하는 높이로 충전 단자(T1)가 상승된 상태에서, 증가된 높이를 보상함으로써 hTE 를 조정하기 위해 보상 단자(T2)가 사용될 수 있다. 보상 단자(T2)의 효과는 Hankel 크로스오버 거리에서 파 경사가 라인 166으로 예시된 바와 같이 브루스터 각도에 있도록 유도 표면 도파 프로브의 전기적 유효 높이를 감소시키는 것(또는 사실상 손실성 매체 계면을 상승시키는 것)이다.
전체 유효 높이는 보상 단자(T2)와 연계된 하부 유효 높이(hLE)와 충전 단자(T1)와 연계된 상부 유효 높이(hUE)의 중첩으로서 기재될 수 있으며, 그래서 다음과 같다:
여기서, ΦU 는 상부 충전 단자(T1)에 인가된 위상 지연이고, ΦL은 보상 단자(T2)에 인가된 위상 지연이고, β=2π/λp는 방정식 (35)로부터의 전파 인자이며, hp는 충전 단자(T1)의 물리적 높이이고, hd는 보상 단자(T2)의 물리적 높이이다. 잉여 리드 길이가 고려되는 경우, 이들은 아래에 나타난 바와 같이 보상 단자(T2)의 물리적 높이(hd)에 보상 단자 리드 길이(y)를 가산하고 충전 단자(T1)의 물리적 높이(hp)에 충전 단자 리드 길이(z)를 가산함으로써 고려될 수 있다.
하부 유효 높이는 도 5a의 복소 유효 높이(heff)와 같도록 전체 유효 높이(hTE)를 조정하기 위해 사용될 수 있다.
방정식 (85) 또는 (86)은 Hankel 크로스오버 거리에서 원하는 파 경사를 획득하도록 단자들로의 급전을 위한 위상 각도 및 보상 단자(T2)의 하부 디스크의 물리적 높이를 결정하기 위해 사용될 수 있다. 예로서, 방정식 (86)은 보상 단자 높이(hd)의 함수로서 충전 단자(T1)에 인가된 위상 이동으로 재기록되어 다음을 제공할 수 있다:
보상 단자(T2)의 위치설정을 결정하기 위해, 전술한 관계가 사용될 수 있다. 먼저, 총 유효 높이(hTE)는 방정식 (86)에 표현된 바와 같이 하부 보상 단자(T2)의 복소 유효 높이(hUE)와 상부 충전 단자(T1)의 복소 유효 높이(hLE)의 중첩이다. 다음에, 입사각의 탄젠트는 다음과 같이 기하학적으로 표현될 수 있다.
이는 파 경사(W)의 정의와 같다. 마지막으로, 원하는 Hankel 크로스오버 거리(Rx)가 주어지면, hTE 는 Hankel 크로스오버 지점(121)에서 복소 브루스터 각도와 입사 광선의 파 경사가 매칭되게 하도록 조정될 수 있다. 이는 hp, ΦU 및/또는 hd를 조정함으로써 달성될 수 있다.
이들 개념은 유도 표면 도파 프로브의 예에 관련하여 설명할 때 더 양호하게 이해될 수 있다. 도 14를 참조하면, 손실성 전도 매체(203)에 의해 제공된 평면에 실질적으로 수직인 수직 축(z)을 따라 위치설정되는 하부 보상 단자(T2)(예를 들어, 높이(hd)의 디스크) 및 상부 충전 단자(T1)(예를 들어, 높이(hT)의 구체)를 포함하는 유도 표면 도파 프로브(200d)의 일 예의 도식적 표현이 도시되어 있다. 동작 동안, 임의의 주어진 순간에 단자들(T1, T2)에 인가되는 전압들에 따라 전하 및 보상 단자(T1, T2) 각각 상에 전하들(Q1, Q2)이 부여된다.
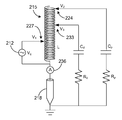
AC 소스(212)는 충전 단자(T1)를 위한 여기 소스로서 작용하고, 이는 예를 들어 나선형 코일 같은 코일(215)을 포함하는 급전 네트워크(209)를 통해 유도 표면 도파 프로브(200d)에 결합된다. AC 소스(212)는 도 14에 도시된 바와 같이 탭(227)을 통해 코일(215)의 하부 부분을 가로질러 연결될 수 있거나 일차 코일에 의해 코일(215)에 유도식으로 결합될 수 있다. 코일(215)은 제1 단부에서 그라운드 말뚝(218)에 결합될 수 있고 제2 단부에서 충전 단자(T1)에 결합될 수 있다. 일부 구현예에서, 충전 단자(T1)에 대한 연결은 코일(215)의 제2 단부의 탭(224)을 사용하여 조정될 수 있다. 보상 단자(T2)는 손실성 전도 매체(203)(예를 들어, 그라운드 또는 지구)와 실질적으로 평행하게 그 위에 위치되고, 코일(215)에 결합된 탭(233)을 통해 에너지공급된다. 코일(215)과 그라운드 말뚝(218) 사이에 위치된 전류계(236)가 사용되어 유도 표면 도파 프로브의 베이스에서 전류 유동(I0)의 크기의 표시를 제공한다. 대안적으로, 전류 클램프가 그라운드 말뚝(218)에 결합된 전도체 둘레에 사용되어 전류 유동(I0)의 크기의 표시를 획득할 수 있다.
도 14의 예에서, 코일(215)은 제1 단부에서 그라운드 말뚝(218)에 결합되고 제2 단부에서 수직 급전 라인 전도체(221)를 통해 충전 단자(T1)에 결합된다. 일부 구현예에서, 충전 단자(T1)에 대한 연결은 도 14에 도시된 바와 같이 코일(215)의 제2 단부의 탭(224)을 사용하여 조정될 수 있다. 코일(215)은 코일(215)의 하부 부분에서 탭(227)을 통해 AC 소스(212)에 의해 동작 주파수로 에너지 공급될 수 있다. 다른 구현예에서, AC 소스(212)는 일차 코일을 통해 코일(215)에 유도식으로 결합될 수 있다. 보상 단자(T2)는 코일(215)에 결합된 탭(233)을 통해 에너지 공급된다. 코일(215)과 그라운드 말뚝(218) 사이에 위치된 전류계(236)가 사용되어 유도 표면 도파 프로브(200d)의 베이스에서 전류 유동의 크기의 표시를 제공한다. 대안적으로, 전류 클램프가 그라운드 말뚝(218)에 결합된 전도체 둘레에 사용되어 전류 유동의 크기의 표시를 획득할 수 있다. 보상 단자(T2)는 손실성 전도 매체(203)(예를 들어, 그라운드)와 실질적으로 평행하게, 그 위에 위치된다.
도 14의 예에서, 충전 단자(T1)에 대한 연결은 보상 단자(T2)를 위한 탭(233)의 연결 지점 위에서 코일(215) 상에 위치되어 있다. 이런 조정은 증가된 전압(그리고, 따라서 더 높은 전하(Q1))가 상부 충전 단자(T1)에 인가될 수 있게 한다. 다른 실시예에서, 충전 단자(T1)와 보상 단자(T2)를 위한 연결 지점이 반전될 수 있다. Hankel 크로스오버 거리(Rx)에서 유도 표면파 경사를 갖는 전기적 필드를 여기하기 위해 유도 표면 도파 프로브(200d)의 전체 유효 높이(hTE)를 조정하는 것이 가능하다. Hankel 크로스오버 거리는 또한 -jγρ에 대하여 방정식 (20b) 및 (21)의 크기를 같다고 놓고 도 4에 예시된 바와 같이 Rx에 대하여 푸는 것에 의해 발견될 수 있다. 굴절 지수(n), 복소 브루스터 각도(θi,B 및 ψi,B), 파 경사( ) 및 복소 유효 높이(heff =hpejΦ)는 상술한 방정식 (41)-(44)에 관하여 설명된 바와 같이 결정될 수 있다.
) 및 복소 유효 높이(heff =hpejΦ)는 상술한 방정식 (41)-(44)에 관하여 설명된 바와 같이 결정될 수 있다.
선택된 충전 단자(T1) 구성에서, 구체 직경(또는 유효 구체 직경)이 결정될 수 있다. 예로서, 충전 단자(T1)가 구로서 구성되지 않는 경우, 이때, 단자 구성은 유효 구체 직경을 갖는 구체 용량으로서 모델링될 수 있다. 충전 단자(T1)의 크기는 단자 상에 부여되는 전하(Q1)를 위해 충분히 큰 표면을 제공하도록 선택될 수 있다. 일반적으로, 실용적으로 가능한 한 크게 충전 단자(T1)를 구성하는 것이 바람직하다. 충전 단자(T1)의 크기는 충전 단자 주변의 전기 방전 또는 스파크형성을 초래할 수 있는 주변 공기의 이온화를 피하도록 충분히 커야 한다. 충전 단자(T1) 상의 속박 전하의 양을 감소시키기 위해, 유도 표면파를 발진시키기 위한 충전 단자(T1) 상에 자유 전하를 제공하기 위한 바람직한 고도는 손실성 전도 매체(예를 들어, 지구) 위의 유효 구체 직경의 적어도 4-5 배이어야 한다. 보상 단자(T2)는 Rx에서 유도 표면파를 갖는 전기적 필드를 여기시키기 위해 유도 표면 도파 프로브(200d)의 전체 유효 높이(hTE)를 조정하기 위해 사용될 수 있다. 보상 단자(T2)는 hd=hT-hp에서 충전 단자(T1) 아래에 위치될 수 있고, 여기서, hT 는 충전 단자(T1)의 전체 물리적 높이이다. 보상 단자(T2)의 위치가 고정되고 위상 지연(ΦU)이 상부 충전 단자(T1)에 인가된 상태에서, 하부 보상 단자(T2)에 인가된 위상 지연(ΦL)은 다음이 되도록 방정식 (86)의 관계를 사용하여 결정될 수 있다:

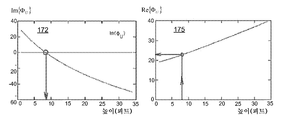
대안적 실시예에서, 보상 단자(T2)는 높이(hd)에 위치될 수 있고, 여기서 Im{ΦL}= 0이다. 이는 ΦU 의 허수부와 실수부의 플롯(172, 175)을 각각 도시하는 도 15a에 도식적으로 예시되어 있다. 보상 단자(T2)는 플롯 172에 도식적으로 예시된 바와 같이 Im{ΦU} = 0인 높이(hd)에 위치되어 있다. 이 고정된 높이에서, 코일 위상(ΦU)은 플롯(175)에 도식적으로 예시된 바와 같이 Re{ΦU}로부터 결정될 수 있다.
AC 소스(212)가 코일(215)에 결합된 상태에서(예를 들어, 결합을 최대화하기 위해 50Ω 지점에서), 탭(233)의 위치는 동작 주파수에서의 코일의 적어도 일부와의 보상 단자(T2)의 평행 공진을 위해 조정될 수 있다. 도 15b는 도 14의 일반적 전기적 훅업(electrical hookup)의 개략도를 도시하며, 여기서, V1은 탭(227)을 통해 AC 소스(212)로부터 코일(215)의 하부 부분에 인가된 전압이고, V2는 상부 충전 단자(T1)에 공급되는 탭(224)에서의 전압이고, V3는 탭(233)을 통해 하부 보상 단자(T2)에 인가된 전압이다. 저항(Rp 및 Rd)은 각각 충전 단자(T1) 및 보상 단자(T2)의 그라운드 리턴 저항을 나타낸다. 전하 및 보상 단자(T1, T2)는 구체, 원통체, 원환체, 링, 후드 또는 용량성 구조의 다른 조합으로 구성될 수 있다. 전하 및 보상 단자(T1, T2)의 크기는 단자 상에 부여되는 전하(Q1, Q2)를 위해 충분히 큰 표면을 제공하도록 선택될 수 있다. 일반적으로, 실용적으로 가능한 한 크게 충전 단자(T1)를 구성하는 것이 바람직하다. 충전 단자(T1)의 크기는 충전 단자 주변의 전기 방전 또는 스파크형성을 초래할 수 있는 주변 공기의 이온화를 피하도록 충분히 커야 한다. 전하 및 보상 단자(T1 및 T2) 각각의 자기 용량(Cp 및 Cd)은 예로서 방정식 (24)을 사용하여 결정될 수 있다.
도 15b에서 볼 수 있는 바와 같이, 보상 단자(T2)와 연계된 그라운드 리턴 저항(Rd)과 보상 단자(T2)의 자기 용량(Cd) 및 코일(215)의 인덕턴스의 적어도 일부에 의해 공진 회로가 형성된다. 평행 공진은 보상 단자(T2)에 인가되는 전압(V3)을 조정함으로써(예를 들어, 코일(215) 상의 탭(233) 위치를 조정함으로써) 또는 Cd를 조정하도록 보상 단자(T2)의 높이 및/또는 크기를 조정함으로써 정립될 수 있다. 코일(233)의 위치는 평행 공진을 위해 조정될 수 있고, 이는 그라운드 말뚝(218) 및 전류계(236)를 통한 그라운드 전류가 최대 지점에 도달하게 한다. 보상 단자(T2)의 평행 공진이 정립된 이후, AC 소스(212)를 위한 탭(227)의 위치는 코일(215) 상의 50Ω 지점으로 조정될 수 있다.
코일(215)로부터의 전압(V2)은 충전 단자(T1)에 인가될 수 있고, 탭(224)의 위치는 전체 유효 높이(hTE)의 위상(Φ)이 Hankel 크로스오버 거리(Rx)에서 유도 표면 파 경사(WRx)의 각도와 대략 동일하도록 조정될 수 있다. 코일 탭(224)의 위치는 이 동작 지점이 도달될 때까지 조정될 수 있고, 이는 전류계(236)를 통한 그라운드 전류가 최대치까지 증가되게 한다. 이 지점에서, 유도 표면 도파 프로브(200d)에 의해 여기된 결과적 필드는 손실성 전도 매체(203)의 표면 상의 유도 표면 도파 모드에 실질적으로 모드 매칭됨으로써 손실성 전도 매체(203)의 표면을 따른 유도 표면파의 발진을 초래한다. 이는 유도 표면 도파 프로브(200)로부터 연장하는 레디얼을 따라 필드 강도를 측정함으로써 확인될 수 있다.
보상 단자(T2)를 포함하는 회로의 공진은 충전 단자(T1)의 부착 및/또는 탭(224)을 통해 충전 단자(T1)에 인가되는 전압의 조정에 의해 변할 수 있다. 공진을 위해 보상 단자 회로를 조정하는 것이 충전 단자 연결의 후속 조정을 돕지만, Hankel 크로스오버 거리(Rx)에서 유도 표면 파 경사(WRx)를 정립하는 것은 필수적이지는 않다. 시스템은 AC 소스(212)를 위한 탭(227)의 위치를 코일(215) 상의 50Ω 지점이 되도록 반복적으로 조정하고, 전류계(236)를 통한 그라운드 전류를 최대화하도록 탭(233)의 위치를 조정함으로써 결합을 개선시키도록 추가로 조정될 수 있다. 보상 단자(T2)를 포함하는 회로의 공진은 탭(227, 233)의 위치가 조정됨에 따라 또는 다른 구성요소가 코일(215)에 부착될 때 편이될(drift) 수 있다.
다른 구현예에서, 코일(215)로부터의 전압(V2)은 충전 단자(T1)에 인가될 수 있고, 탭(233)의 위치는 전체 유효 높이(hTE)의 위상(Φ)이 Rx에서 유도 표면파의 각도(ψ)와 대략 동일하도록 조정될 수 있다. 코일 탭(224)의 위치는 동작 지점이 도달될 때까지 조정됨으로써 전류계(236)를 통한 그라운드 전류가 실질적으로 최대치에 도달하게 한다. 결과적 필드는 손실성 전도 매체(203)의 표면 상의 유도 표면 도파 모드에 실질적으로 모드 매칭되고, 유도 표면파는 손실성 전도 매체(203)의 표면을 따라 발진된다. 이는 유도 표면 도파 프로브(200)로부터 연장하는 레디얼을 따라 필드 강도를 측정함으로써 확인될 수 있다. 시스템은 AC 소스(212)를 위한 탭(227)의 위치를 코일(215) 상의 50Ω 지점이 되도록 반복적으로 조정하고, 전류계(236)를 통한 그라운드 전류를 최대화하도록 탭(224, 233)의 위치를 조정함으로써 결합을 개선시키도록 추가로 조정될 수 있다.
도 12를 다시 참조하면, 유도 표면 도파 프로브(200)의 동작은 유도 표면 도파 프로브(200)와 연계된 동작 조건의 변동에 대해 조정되도록 제어될 수 있다. 예로서, 프로브 제어 시스템(230)이 사용되어 유도 표면 도파 프로브(200)의 동작을 제어하기 위해 급전 네트워크(209) 및/또는 충전 단자(T1) 및/또는 보상 단자(T2)의 위치설정을 제어할 수 있다. 동작 조건은 손실성 전도 매체(203)의 특성의 변동(예를 들어, 전도율(σ) 및 상대 유전율(εr)), 필드 강도의 변동 및/또는 유도 표면 도파 프로브(200)의 부하의 변동을 포함할 수 있지만 이에 한정되지는 않는다. 방정식 (41) - (44)로부터 볼 수 있는 바와 같이, 굴절 지수(n), 복소 브루스터 각도(θi,B 및 ψi,B), 파 경사( ) 및 복소 유효 높이(heff =hpejΦ)는 예를 들어 기후 조건으로부터 초래되는 토양 전도율 및 유전율의 변화에 의해 영향을 받을 수 있다.
) 및 복소 유효 높이(heff =hpejΦ)는 예를 들어 기후 조건으로부터 초래되는 토양 전도율 및 유전율의 변화에 의해 영향을 받을 수 있다.
예를 들어 전도율 측정 프로브, 유전율 센서, 그라운드 파라미터 측정기, 필드 측정기, 전류 모니터 및/또는 부하 수신기 같은 장비가 사용되어 동작 조건의 변화를 모니터링하고 프로브 제어 시스템(230)에 현재 동작 조건에 대한 정보를 제공할 수 있다. 프로브 제어 시스템(230)은 그후 유도 표면 도파 프로브(200)를 위한 지정된 동작 조건을 유지하기 위해 유도 표면 도파 프로브(200)에 대한 하나 이상의 조정을 수행할 수 있다. 예로서, 습기 및 온도가 변함에 따라, 토양의 전도율이 또한 변할 것이다. 전도율 측정 프로브 및/또는 유전율 센서가 유도 표면 도파 프로브(200) 주변의 다수의 장소에 위치될 수 있다. 일반적으로, 동작 주파수에 대하여 Hankel 크로스오버 거리(Rx)에서 또는 그 주변에서 전도율 및/또는 유전율을 모니터링하는 것이 바람직하다. 전도율 측정 프로브 및/또는 유전율 센서가 유도 표면 도파 프로브(200) 주변의 다수의 장소에(예를 들어, 각 사분역 내에) 위치될 수 있다.
도 16을 참조하면, 수직축(z)을 따라 배열된 충전 단자(T1) 및 충전 단자(T2)를 포함하는 유도 표면 도파 프로브(200e)의 일례가 도시되어 있다. 유도 표면 도파 프로브(200e)는 영역 1을 구성하는 손실성 전도 매체(203) 위에 배치된다. 추가적으로, 제2 매체(206)가 손실성 전도 매체(203)와 경계 계면을 공유하며, 영역 2를 구성한다. 충전 단자들(T1, T2)은 손실성 전도 매체(203) 위에 배치된다. 충전 단자(T1)는 높이(H1)에 배치되고, 충전 단자(T2)는 높이(H2)에서 수직축(z)을 따라 T1 바로 아래 배치되며, H2는 H1보다 작다. 유도 도파 프로브(200e)에 의해 제공되는 전송 구조의 높이(h)는 h = H1 - H2이다. 유도 표면 도파 프로브(200e)는 충전 단자(T1, T2)에 여기 소스(212)를 결합하는 급전 네트워크(209)를 포함한다.
충전 단자(T1 및/또는 T2)는 실용적으로 가능한 많은 전하를 보유하도록 크기설정될 수 있는 전기 전하를 보유할 수 있는 전도성 매스(conductive mass)를 포함한다. 충전 단자(T1)는 자기 용량(C1)을 가지고, 충전 단자(T2)는 자기 용량(C2)을 가지며, 이는 예로서 방정식 (24)을 사용하여 결정될 수 있다. 충전 단자(T2) 바로 위의 충전 단자(T1)의 배치로 인해, 충전 단자들(T1, T2) 사이에 상호 용량(CM)이 생성된다. 충전 단자들(T1, T2)은 동일할 필요가 없으며, 각자 개별 크기 및 형상을 가질 수 있고, 상이한 전도성 재료들을 포함할 수 있다는 점에 유의한다. 궁극적으로, 유도 표면 도파 프로브(200e)에 의해 발진되는 유도 표면파의 필드 강도는 단자(T1) 상의 전하의 양에 정비례한다. 전하(Q1)는 따라서 Q1 = C1V이기 때문에 충전 단자(T1)와 관련된 자기 용량(C1)에 비례하며, 여기서 V는 충전 단자(T1) 상에 부여되는 전압이다.
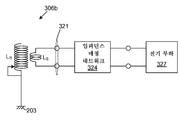
사전 규정된 동작 주파수에서 동작하도록 적절히 조정될 때, 유도 도파 프로브(200e)는 손실성 전도 매체(203)의 표면을 따라 유도 표면파를 생성한다. 여기 소스(212)는 구조를 여기시키기 위해 유도 표면 도파 프로브(200e)에 인가되는 미리 정의된 주파수에서 전기 에너지를 발생시킬 수 있다. 유도 표면 도파 프로브(200e)에 의해 생성되는 전자기 필드들이 손실성 전도 매체(203)와 실질적으로 모드 일치되면, 전자기 필드들은 실질적으로, 거의 또는 전혀 반사를 유발하지 않는 브루스터 각도로 입사하는 파면을 합성한다. 따라서, 표면 도파 프로브(200e)는 방사 파를 생성하지 않고 손실성 전도 매체(203)의 표면을 따른 유도 표면 진행 파를 발진시킨다. 여기 소스(212)로부터의 에너지는 Zenneck 표면 전류로서 유도 표면 도파 프로브(200e)의 유효 전송 범위 내에 위치되어 있는 하나 이상의 수신기에 전송될 수 있다.
J1 (ρ) 근위 및 J2(ρ) 원위가 되는 손실성 전도 매체(203)의 표면 상의 레디얼 Zenneck 표면 전류(Jρ(ρ))의 점근선을 결정할 수 있으며,
근위(ρ < λ/8):  , 및
(90)
, 및
(90)
원위(ρ >> λ/8):  (91)
(91)
여기서 I1은 제1 충전 단자(T1) 상의 전하(Q1)를 공급하는 전도 전류이고, I2는 제2 충전 단자(T2) 상에 전하(Q2)를 공급하는 전도 전류이다. 상부 충전 단자(T1) 상의 전하(Q1)는 Q1 = C1V1에 의해 결정되며, 여기서 C1은 충전 단자(T1)의 고립된 용량이다.  로 주어지는 앞서 언급한 J1에 대한 제3 성분이 존재한다는 점을 유의하여야 하며, 이는 Leontovich 경계 조건을 따르며, 제1 충전 단자(Q1) 상의 상승된 진동 전하의 준-정적 필드에 의해 펌핑되는 손실성 전도 매체(203)에서의 레디얼 전류 기여도이다. 양 Zρ=jωμo/γe는 손실성 전도 매체의 레디얼 임피던스이며,
로 주어지는 앞서 언급한 J1에 대한 제3 성분이 존재한다는 점을 유의하여야 하며, 이는 Leontovich 경계 조건을 따르며, 제1 충전 단자(Q1) 상의 상승된 진동 전하의 준-정적 필드에 의해 펌핑되는 손실성 전도 매체(203)에서의 레디얼 전류 기여도이다. 양 Zρ=jωμo/γe는 손실성 전도 매체의 레디얼 임피던스이며,  이다.
이다.
방정식 (90) 및 (91)에 의해 기재된 바와 같이 근위 및 원위의 레디얼 전류를 나타내는 점근선은 복소 양이다. 다양한 실시예에 따라서, 물리적 표면 전류(J(ρ))는 크기 및 위상이 전류 점근선에 가능한 근접하게 일치하도록 합성된다. 즉, 근위  는
는  에 대해 접하게 되고, 원위
에 대해 접하게 되고, 원위  는
는  에 접하게 된다. 또한, 다양한 실시예에 따라서, J(ρ)의 위상은 J1 근위의 위상으로부터 J2 원위의 위상으로 전이하여야 한다.
에 접하게 된다. 또한, 다양한 실시예에 따라서, J(ρ)의 위상은 J1 근위의 위상으로부터 J2 원위의 위상으로 전이하여야 한다.
유도 표면파를 발진시키도록 전송 부위에서 유도 표면파 모드를 매칭시키기 위하여, 표면 전류의 위상( 원위)의 위상은 대략 45도 또는 225도의 상수와
원위)의 위상은 대략 45도 또는 225도의 상수와  에 대응하는 전파 위상만큼 표면 전류(
에 대응하는 전파 위상만큼 표면 전류( 근위)의 위상과는 달라야 한다. 이는
근위)의 위상과는 달라야 한다. 이는  를 위해 두 개의 근이 하나는 π/4 부근에, 그리고, 하나는 5π/4 부근에 존재하기 때문이다. 적절히 조정된 합성 레디얼 표면 전류는 다음과 같다.
를 위해 두 개의 근이 하나는 π/4 부근에, 그리고, 하나는 5π/4 부근에 존재하기 때문이다. 적절히 조정된 합성 레디얼 표면 전류는 다음과 같다.
이는 방정식 (17)과 일치함을 유의하여야 한다. Maxwell 방정식에 의해, 이런 J(ρ) 표면 전류는 다음에 부합되도록 필드를 자동으로 생성한다.
따라서, 매칭된 유도 표면 도파모드에 대해 표면 전류  원위 및 표면 전류
원위 및 표면 전류  근위 사이의 위상차는 방정식 (1)-(3)과 일치하는 방정식 (93)-(95)의 Hankel 함수의 특성에 기인한다. 방정식 (1)-(6) 및 (17)과 방정식에 의해 (92)-(95)에 의해 표현되는 필드는 지상파 전파와 연계된 방사 필드가 아닌 손실성 계면에 결합된 전송 라인 모드의 특성을 갖는다.
근위 사이의 위상차는 방정식 (1)-(3)과 일치하는 방정식 (93)-(95)의 Hankel 함수의 특성에 기인한다. 방정식 (1)-(6) 및 (17)과 방정식에 의해 (92)-(95)에 의해 표현되는 필드는 지상파 전파와 연계된 방사 필드가 아닌 손실성 계면에 결합된 전송 라인 모드의 특성을 갖는다.
주어진 위치에서 유도 표면 도파 프로브(200e)의 주어진 설계에 대해 적절한 전압 크기들 및 위상들을 획득하기 위해, 반복 접근법이 이용될 수 있다. 구체적으로, 생성되는 레디얼 표면 전류 밀도를 결정하기 위해 단자들(T1, T2)에 대한 급전 전류들, 충전 단자들(T1, T2) 상의 전하들 및 손실성 전도 매체(203) 내의 그들의 이미지들을 고려하여 유도 도파 프로브(200e)의 주어진 여기 및 구성에 대한 분석이 수행될 수 있다. 이러한 프로세스는 주어진 유도 표면 도파 프로브(200e)에 대한 최적 구성 및 여기가 원하는 파라미터들에 기초하여 결정될 때까지 반복적으로 수행될 수 있다. 주어진 유도 표면 도파 프로브(200e)가 최적 레벨에서 동작하고 있는지를 결정하는 것을 돕기 위해, 유도 도파 프로브(200e)의 위치에서의 영역 1의 전도율(σ1) 및 영역 1의 유전율(ε1)에 대한 값들에 기초하여 위의 방정식 (1)-(12)을 이용하여 유도 필드 강도 곡선(103)(도 1)이 생성될 수 있다. 이런 유도 필드 강도 곡선(103)은 최적 전송이 달성되었는지를 결정하기 위해 측정된 필드 강도들이 유도 필드 강도 곡선(103)에 의해 나타내어지는 크기들과 비교될 수 있게 하도록 동작에 대한 벤치마크를 제공할 수 있다.
최적화된 조건에 도달하기 위해, 유도 표면 도파 프로브(200e)와 연계된 다양한 파라미터가 조정될 수 있다. 유도 표면 도파 프로브(200e)를 조정하기 위해 변경될 수 있는 하나의 파라미터는 손실성 전도 매체(203)의 표면에 대한 충전 단자들(T1 및/또는 T2) 중 하나 또는 양자의 높이이다. 추가적으로, 충전 단자들(T1, T2) 간의 거리 또는 간격도 조정될 수 있다. 그렇게 하면서, 인식될 수 있는 바와 같이 충전 단자들(T1, T2)과 손실성 전도 매체(203) 간의 상호 용량(CM) 또는 임의의 결합 용량들을 최소화하거나 다른 방식으로 변경할 수 있다. 각각의 충전 단자(T1 및/또는 T2)의 크기도 조정될 수 있다. 인식될 수 있는 바와 같이, 충전 단자들(T1 및/또는 T2)의 크기를 변경함으로써, 각각의 자기 용량(C1 및/또는 C2) 및 상호 용량(CM)을 변경할 것이다.
또한, 조정될 수 있는 다른 파라미터는 유도 표면 도파 프로브(200e)와 관련된 급전 네트워크(209)이다. 이는 급전 네트워크(209)를 구성하는 유도 및/또는 용량 리액턴스들의 크기를 조정함으로써 달성될 수 있다. 예를 들어, 그러한 유도 리액턴스들이 코일들을 포함하는 경우, 그러한 코일들 상의 권회수가 조정될 수 있다. 궁극적으로, 급전 네트워크(209)에 대한 조정은 급전 네트워크(209)의 전기적 길이를 변경하여, 충전 단자들(T1, T2)에 대한 전압 크기들 및 위상들에 영향을 주도록 행해질 수 있다.
다양한 조정을 행함으로써 수행되는 전송의 반복은 인식될 수 있는 바와 같이 컴퓨터 모델들을 이용하여 또는 물리 구조들을 조정하여 구현될 수 있다는 점에 유의한다. 상술한 조정을 이행함으로써, 전술한 방정식 (90) 및 (91)에 명시된 유도 표면 도파 모드의 동일한 전류(J(ρ))와 근사한 대응하는 "근위" 표면 전류(J1) 및 "원위" 표면 전류(J2)를 생성할 수 있다. 따라서, 결과적인 전자기 필드들은 손실성 전도 매체(203)의 표면 상의 유도 표면파 모드에 실질적으로 또는 대략 모드 일치된다.
도 16의 예에는 도시되어 있지 않지만, 유도 표면 도파 프로브(200e)의 동작은 유도 표면 도파 프로브(200)와 연계된 동작 조건의 변동에 대해 조정되도록 제어될 수 있다. 예로서, 도 12에 도시된 프로브 제어 시스템(230)이 유도 표면 도파 프로브(200e)의 동작을 제어하기 위해 충전 단자(T1 및/또는 T2)의 크기 및/또는 위치설정 및/또는 급전 네트워크(209)를 제어하기 위해 사용될 수 있다. 동작 조건은 손실성 전도 매체(203)의 특성의 변동(예를 들어, 전도율(σ) 및 상대 유전율(εr)), 필드 강도의 변동 및/또는 유도 표면 도파 프로브(200e)의 부하의 변동을 포함할 수 있지만 이에 한정되지는 않는다.
이제 도 17을 참조하면, 유도 표면 도파 프로브(200f)로서 여기서 표시되는 도 16의 유도 표면 도파 프로브(200e)의 일 예가 도시되어 있다. 유도 표면 도파 프로브(200f)는 손실성 전도 매체(203)(예컨대, 지구)에 의해 제공되는 평면에 실질적으로 수직인 수직 축(z)을 따라 배치되는 충전 단자들(T1, T2)을 포함한다. 제2 매체(206)는 손실성 전도 매체(203) 위에 있다. 충전 단자(T1)는 자기 용량(C1)을 가지고, 충전 단자(T2)는 자기 용량(C2)을 가진다. 동작 동안, 임의의 주어진 순간에 충전 단자들(T1, T2)에 인가되는 전압들에 따라 충전 단자들(T1, T2) 각각 상에 전하들(Q1, Q2)이 부여된다. 충전 단자들(T1, T2) 사이에는 그들 간의 거리에 따라 상호 용량(CM)이 존재할 수 있다. 추가적으로, 각각의 충전 단자(T1, T2)와 손실성 전도 매체(203) 사이에는 손실성 전도 매체(203)에 대한 각각의 충전 단자(T1, T2)의 높이들에 따라 결합 용량들이 존재할 수 있다.
유도 표면 도파 프로브(200f)는 충전 단자(T1, T2) 각각에 결합되는 한 쌍의 리드를 갖는 코일(L1a)을 포함하는 유도 임피던스를 포함하는 급전 네트워크(209)를 포함한다. 일 실시예에서, 코일(L1a)은 유도 표면 도파 프로브(200f)의 동작 주파수에서의 파장의 절반(1/2)인 전기적 길이를 갖도록 지정된다.
코일(L1a)의 전기적 길이가 동작 주파수에서의 파장의 약 절반(1/2)으로서 지정되지만, 코일(L1a)은 다른 값들의 전기적 길이를 갖도록 지정될 수 있다. 일 실시예에 따르면, 코일(L1a)이 동작 주파수에서의 파장의 약 절반의 전기적 길이를 갖는다는 사실은 충전 단자들(T1, T2) 상에서 최대 전압차가 생성된다는 점에서 장점을 제공한다. 그럼에도 불구하고, 코일(L1a)의 길이 또는 직경은 유도 표면파 모드의 최적의 여기를 획득하기 위해 유도 표면 도파 프로브(200f)를 조정할 때 증가 또는 감소할 수 있다. 코일 길이의 조정은 코일의 일 단부 또는 양 단부에 위치된 탭에 의해 제공될 수 있다. 다른 실시예에서, 유도 임피던스는 유도 도파 프로브(200f)의 동작 주파수에서의 파장의 1/2보다 훨씬 작거나 큰 전기적 길이를 갖도록 지정될 수 있다.
여기 소스(212)는 자기 결합에 의해 급전 네트워크(209)에 결합될 수 있다. 구체적으로, 여기 소스(212)는 코일(L1a)에 유도적으로 결합되는 코일(LP)에 결합된다. 이것은 인식될 수 있는 바와 같이 링크 결합, 탭핑된 코일, 가변 리액턴스 또는 다른 결합 접근법에 의해 행해질 수 있다. 이 때문에, 인식될 수 있는 바와 같이, 코일(LP)은 1차측으로서 작용하고, 코일(L1a)은 2차측으로서 작용한다.
원하는 유도 표면파의 전송을 위해 유도 도파 프로브(200f)를 조정하기 위해, 각각의 충전 단자(T1, T2)의 높이가 손실성 전도 매체(203)에 대해 그리고 서로에 대해 변경될 수 있다. 또한, 충전 단자들(T1, T2)의 크기들이 변경될 수 있다. 추가적으로, 코일(L1a)의 크기는 권선들을 추가 또는 제거함으로써 또는 코일(L1a)의 소정의 다른 치수를 변경함으로써 변경될 수 있다. 또한, 코일(L1a)은 도 17에 도시된 바와 같이 전기적 길이를 조정하기 위한 하나 이상의 탭을 포함할 수 있다. 각 충전 단자(T1 또는 T2)에 연결된 탭의 위치도 조정될 수 있다.
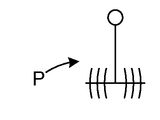
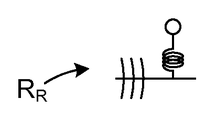
다음에 도 18a, 도 18b, 도 18c 및 도 19를 참조하면, 무선 전력 전달 시스템들에서 표면 유도 파들을 이용하기 위한 일반화된 수신 회로들의 예들이 도시되어 있다. 도 18a, 도 18b 및 도 18c는 각각 선형 프로브(303) 및 튜닝형 공진기(306)를 포함한다. 도 19는 본 개시 내용의 다양한 실시예들에 따른 자기 코일(309)이다. 다양한 실시예들에 따르면, 선형 프로브(303), 튜닝형 공진기(306) 및 자기 코일(309) 각각은 다양한 실시예들에 따라 손실성 전도 매체(203)의 표면 상에서 유도 표면파의 형태로 전송되는 전력을 수신하는 데 사용될 수 있다. 전술한 바와 같이, 일 실시예에서, 손실성 전도 매체(203)는 지상 매체를 포함한다.
도 18a를 참조하면, 선형 프로브(303)의 출력 단자들(312)에서의 개방 회로 단자 전압은 선형 프로브(303)의 유효 높이에 의존한다. 이 때문에, 단자 지점 전압은 다음과 같이 계산될 수 있다.
여기서, Einc는 미터당 볼트 단위로 선형 프로브(303) 상에 유도된 입사 전기 필드의 강도이고, dl는 선형 프로브(303)의 방향을 따른 적분의 요소이며, he는 선형 프로브(303)의 유효 높이이다. 전기적 부하(315)가 임피던스 일치 네트워크(318)를 통해 출력 단자들(312)에 결합된다.
선형 프로브(303)에 전술한 바와 같은 유도 표면파가 인가될 때, 출력 단자들(312) 양단에는 전압이 발생하며, 이 전압은 경우에 따라서는 켤레 임피던스 매칭 네트워크(318)를 통해 전기적 부하(315)에 인가될 수 있다. 전기적 부하(315)로의 전력의 흐름을 촉진하기 위해, 전기적 부하(315)는 후술하는 바와 같이 선형 프로브(303)에 실질적으로 임피던스 매칭되어야 한다.
도 18b를 참조하면, 유도 표면파의 파 경사와 동일한 위상 이동을 소유하는 그라운드 전류 여기 코일(306a)은 손실성 전도 매체(203) 위로 상승된(또는 현수된) 충전 단자(TR)를 포함한다. 충전 단자(TR)는 자기 용량(CR)을 갖는다. 추가적으로, 손실성 전도 매체(203) 위의 충전 단자(TR)의 높이에 따라 충전 단자(TR)와 손실성 전도 매체(203) 사이에 결합 용량(미도시)이 또한 존재할 수 있다. 결합 용량은 바람직하게는 실용적으로 가능한 많이 최소화되어야 하지만, 이것은 모든 사례에서 전적으로 필요하지는 않을 수 있다.
튜닝형 공진기(306a)는 또한 위상 이동(Φ)을 갖는 코일(LR)을 포함하는 수신기 네트워크를 포함한다. 코일(LR)의 한 단부는 충전 단자(TR)에 결합되며, 코일(LR)의 다른 단부는 손실성 전도 매체(203)에 결합된다. 수신기 네트워크는 충전 단자(TR)에 코일(LR)을 결합하는 수직 급전 라인 전도체를 포함할 수 있다. 이 때문에, 코일(LR)(튜닝형 공진기(LR-CR)로도 지칭될 수 있음)은 직렬-조정 공진기를 충전 단자(CR)로서 포함하며, 코일(LR)은 직렬로 배치된다. 코일(LR)의 위상 지연은 구조의 위상(Φ)이 파 경사(ψ)의 각도와 실질적으로 동일해지도록 충전 단자(TR)의 크기 및/또는 높이를 변경함으로써 및/또는 코일(LR)의 크기를 조정함으로써 조정될 수 있다. 수직 공급 라인의 위상 지연은 또한 예를 들어, 전도체의 길이를 변화시킴으로써 조정될 수 있다.
예로서, 자기 용량(CR)에 의해 제공되는 저항은 1/jωCR로서 계산된다. 구조(306a)의 전체 용량은 또한 손실성 전도 매체(203)와 충전 단자(TR) 사이의 용량을 포함할 수 있고, 여기서, 구조(306a)의 전체 용량은 인지할 수 있는 바와같이 임의의 결합 용량 및 자기 용량(CR) 양자로부터 계산될 수 있다. 일 실시예에 따라서, 충전 단자(TR)는 임의의 결합 용량을 실질적으로 감소시키거나 제거하도록 소정 높이로 상승될 수 있다. 결합 용량의 존재는 전술한 바와 같이 손실성 전도 매체(203)와 충전 단자(TR) 사이의 용량 측정으로부터 결정될 수 있다.
이산 요소 코일(LR)에 의해 제공되는 유도 리액턴스는 jωL로서 계산될 수 있고, 여기서 L은 코일(LR)의 집중 요소 인덕턴스이다. 코일(LR)이 분산 요소인 경우, 그 등가 단자 지점 유도 리액턴스는 종래의 접근법에 의해 결정될 수 있다. 구조(306a)를 튜닝하기 위해, 동작 주파수에서 표면 도파로에 대한 모드 매칭의 목적을 위해 위상 지연이 파 경사와 같도록 조정을 수행한다. 이러한 조건에서, 수신 구조체는 표면 도파로와 "모드 매칭"되는 것으로 고려될 수 있다. 임피던스 매칭 네트워크(324) 및/또는 구조 주변의 변압기 링크가 부하에 전력을 결합하기 위해 전기적 부하(327)와 프로브 사이에 삽입될 수 있다. 프로브 단자(321)와 전기적 부하(327) 사이에 임피던스 매칭 네트워크(324)를 삽입하는 것은 전기적 부하(327)에 대한 최대 전력 전달을 위한 켤레 매칭 조건을 실행할 수 있다.
동작 주파수의 표면 전류가 존재하는 상태로 배치되면, 전력은 표면 유도파로부터 전기적 부하(327)로 전달될 것이다. 이 때문에, 전기적 부하(327)는 자기 결합, 용량 결합 또는 전도(직접 탭) 결합을 통해 구조(306a)에 결합될 수 있다. 결합 네트워크의 요소들은 인식될 수 있는 바와 같이 집중 컴포넌트들 또는 분산 요소들일 수 있다.
도 18b에 도시된 실시예에서는, 자기 결합이 이용되며, 여기서 코일(LS)은 변압기 1차측으로서 작용하는 코일(LR)에 대해 2차측으로서 배치된다. 코일(LS)은 인식할 수 있듯이 그를 동일 코어 구조 주위에 기하학적으로 감고서, 결합된 자속을 조정함으로써 코일(LR)에 링크 결합될 수 있다. 추가적으로, 수신 구조체(306a)는 직렬 튜닝형 공진기를 포함하지만, 병렬 튜닝형 공진기 또는 심지어는 적절한 위상 지연의 분산-요소 공진기도 사용될 수 있다.
전자기 필드에 침지된 수신 구조체가 필드로부터 에너지에 결합할 수 있지만, 편광 매칭된 구조가 결합을 최대화함으로써 최상으로 작동할 수 있으며, 도파 모드에 대한 프로브 결합을 위한 통상적 규칙이 관찰되어야 함을 알수 있다. 예로서, TE20(횡방향 전기 모드) 도파 프로브는 TE20 모드에서 여기된 종래의 도파로로부터 에너지를 추출하는 데 최적일 수 있다. 유사하게, 이들 경우에서, 모드 매칭되고 위상 매칭된 수신 구조체는 표면 유도파로부터의 전력 결합에 최적화될 수 있다. 손실성 전도 매체(203)의 표면 상의 유도 표면 도파 프로브(200)에 의해 여기된 유도 표면파는 개방 도파로의 도파 모드로 고려될 수 있다. 도파로 손실을 배제하면, 소스 에너지는 완전히 회수될 수 있다. 유용한 수신 구조체는 E 필드 결합, H 필드 결합 또는 표면 전류 여기될 수 있다.
수신 구조체는 수신 구조체 부근의 손실성 전도 매체(203)의 국지적 특성에 기초하여 유도 표면파와의 결합을 증가 또는 최대화하도록 조정될 수 있다. 이를 달성하기 위해, 수신 구조체의 위상 지연(Φ)은 수신 구조체에서 표면 진행파의 파 경사의 각도(ψ)와 매칭되도록 조정될 수 있다. 적절히 구성되는 경우, 수신 구조체는 그후 복소 깊이 z=-d/2의 완전 전도성 이미지 그라운드 평면에 관하여 공진하도록 튜닝될 수 있다.
코일(LR) 및 코일(LR)과 충전 단자(TR) 사이에 연결된 수직 공급 라인을 포함하는 도 18b의 튜닝형 공진기(306a)를 포함하는 수신 구조체를 고려한다. 손실성 전도 매체(203) 위의 규정된 높이에 충전 단자(TR)가 위치된 상태에서, 코일(LR)의 전체 위상 이동(Φ) 및 수직 급전 라인은 튜닝형 공진기(306a)의 위치에서 파 경사의 각도(ψ)와 매칭될 수 있다. 방정식 (22)로부터, 파 경사는 점근식으로 진행하는 것을 알 수 있고,

여기서, εr은 상대 유전율을 포함하고, σ1은 수신 구조체의 위치에서의 손실성 전도 매체(203)의 전도율이고, εo는 자유 공간의 유전율이며, ω=2πf이고, 여기서 f는 여기 주파수이다. 따라서, 파 경사각(ψ)은 방정식 (97)로부터 결정될 수 있다.
튜닝형 공진기(306a)의 전체 위상 이동(Φ= θc + θy)은 코일(LR)을 통한 위상 지연(θc)과 수직 공급 라인의 위상 지연(θy)을 포함한다. 수직 공급 라인의 전도체 경로(lw)를 따른 공간적 위상 지연은 θy =βwlw 에 의해 주어질 수 있고, 여기서, βw는 수직 공급 라인 전도체를 위한 전파 위상 상수이다. 코일(또는 나선형 지연 라인)에 기인한 위상 지연은 lC의 물리적 길이와 다음과 같은 전파 인자에서 θc =βplC이다.
여기서 Vf는 구조 상의 속도 인자이고, λ0는 공급된 주파수에서의 파장이며, λp는 속도 인자(Vf)로부터 초래되는 전파 파장이다. 위상 지연(θc + θy) 중 하나 또는 양자 모두는 파 경사의 각도(ψ)에 위상 이동(Φ)을 매칭시키기 위해 조정될 수 있다. 예로서, 전체 위상 이동을 파 경사각에 매칭시키도록(Φ=ψ) 코일 위상 지연(θc)을 조정하기 위해 탭 위치가 도 18b의 코일(LR)에 대해 조정될 수 있다. 예로서, 코일의 일부가 도 18b에 예시된 바와 같이 탭 연결에 의해 우회될 수 있다. 또한, 수직 공급 라인 전도체가 탭을 통해 코일(LR)에 연결될 수 있고, 코일 상이 탭의 위치는 파 경사의 각도에 전체 위상 이동을 매칭시키도록 조정될 수 있다.
튜닝형 공진기(306a)의 위상 지연(Φ)이 조정되고 나면, 충전 단자(TR)의 임피던스가 그후 조정되어 복소 깊이(z=-d/2)에 있는 완전 전도성 이미지 그라운드 평면에 관한 공진상태로의 튜닝을 위해 조정될 수 있다. 이는 수직 급전 라인과 코일(LR)의 진행파 위상 지연을 변경하지 않고 충전 단자(T1)의 용량을 조정함으로써 달성될 수 있다. 조정은 도 9a 및 도 9b에 관하여 설명된 것들과 유사하다.
복소 이미지 평면에 대해 손실성 전도 매체(203) 내로 "내려다본" 관찰된 임피던스는 다음에 의해 주어지며:
여기서  이다. 지구 위의 수직 편광된 소스에 대하여, 복소 이미지 평면의 위치는 다음에 의해 주어질 수 있다:
이다. 지구 위의 수직 편광된 소스에 대하여, 복소 이미지 평면의 위치는 다음에 의해 주어질 수 있다:
여기서, μ1은 손실성 전도 매체(203)의 유전율이고, ε1=εrεo이다.
튜닝형 공진기(306a)의 베이스에서, 수신 구조체 내로 "올려다본" 관찰된 임피던스는 도 9a에 예시된 바와 같이  이다. 다음과 같은 단자 임피던스에서:
이다. 다음과 같은 단자 임피던스에서:
-여기서 CR은 충전 단자(TR)의 자기 용량임-, 튜닝형 공진기(306a)의 수직 급전 라인 전도체 내로 "올려다본" 관찰된 임피던스는 다음에 의해 주어지며:
그리고, 튜닝형 공진기(306a)의 코일(LR) 내로 "올려다본" 관찰된 임피던스는 다음에 의해 주어진다:
튜닝형 공진기(306a) 내로 "올려다본" 관찰된 반작용 성분(Xbase)과 손실성 전도 매체(203) 내로 "내려다본" 관찰된 반작용 성분(Xin)을 매칭시킴으로써 유도 표면 도파 모드로의 결합은 최대화될 수 있다.
다음에, 도 18c를 참조하면, 수신 구조체의 상단에서 충전 단자(TR)를 포함하지 않는 튜닝형 공진기(306b)의 일 예가 도시되어 있다. 본 실시예에서, 튜닝형 공진기(306b)는 코일(LR)과 충전 단자(TR) 사이에 결합된 수직 공급 라인을 포함하지 않는다. 따라서, 튜닝형 공진기(306b)의 전체 위상 이동(Φ)은 코일(LR)을 통한 위상 지연(θc)만을 포함한다. 도 18b의 튜닝형 공진기(306a)에서와 같이, 코일 위상 지연(θc can)은 방정식 (97)으로부터 결정된 파 경사의 각도(ψ)와 매칭하도록 조정되며, 이는 Φ=ψ이 되게 한다. 표면 도파 모드로 결합된 수신 구조체에 의해 전력 추출이 가능하지만, 충전 단자(TR)에 의해 제공되는 다양한 반작용 부하 없이 유도 표면파와의 결합을 최대화하도록 수신 구조체를 조정하는 것은 어렵다.
도 18d를 참조하면, 손실성 전도 매체(203)의 표면 상의 유도 표면 도파 모드에 실질적으로 모드 매칭되도록 수신 구조체를 조정하는 예를 예시하는 흐름도(180)가 도시되어 있다. 181에서 시작하여, 수신 구조체가 충전 단자(TR)(예를 들어, 도 18b의 튜닝형 공진기(306a)의)를 포함하는 경우, 그후 충전 단자(TR)는 184에서 손실성 전도 매체(203) 위의 규정된 높이에 위치된다. 표면 유도파가 유도 표면 도파 프로브(200)에 의해 정립되어 있기 때문에, 충전 단자(TR)의 물리적 높이(hp)는 유효 높이의 것 미만일 수 있다. 이 물리적 높이는 충전 단자(TR) 상의 속박 전하를 감소시키거나 최대화하도록 선택될 수 있다(예를 들어, 충전 단자의 구체 직경의 4배). 수신 구조체가 충전 단자(TR)를 포함하지 않는 경우(예를 들어, 도 18c의 튜닝형 공진기(306b)의), 그후 흐름은 187로 진행한다.
187에서, 수신 구조체의 전기적 위상 지연(Φ)이 손실성 전도 매체(203)의 국지적 특성에 의해 규정되는 복소 파 경사각(ψ)에 매칭된다. 나선형 코일의 위상 지연(θc) 및/또는 수직 공급 라인의 위상 지연(θy)은 파 경사(W)의 각도(ψ)와 Φ가 같아지게 하도록 조정될 수 있다. 파 경사의 각도(ψ)는 방정식 (86)으로부터 결정될 수있다. 전기적 위상(Φ)은 그후 파 경사 각도에 매칭될 수 있다. 예로서, 전기적 위상 지연(Φ= θc + θy)은 수직 공급 라인 전도체의 길이(또는 높이) 및/또는 코일(LR)의 기하학적 파라미터를 변경함으로써 조정될 수 있다.
다음에, 190에서, 충전 단자(TR)의 부하 임피던스가 튜닝형 공진기(306a)의 등가 이미지 평면 모델을 공진시키도록 튜닝될 수 있다. 수신 구조체 아래의 전도성 이미지 그라운드 평면(139)(도 9a)의 깊이(d/2)는 방정식 (100)과 국지적으로 측정될 수 있는 수신 구조체에서의 손실성 전도 매체(203)(예를 들어, 지구)의 값을 사용하여 결정될 수 있다. 복소 깊이를 사용하여, 손실성 전도 매체(203)의 물리적 경계(136)(도 9a)와 이미지 그라운드 평면(139) 사이의 위상 이동(θd)은 θd =βod/2를 사용하여 결정될 수 있다. 손실성 전도 매체(203) 내로 "내려다본" 관찰된 바와 같은 임피던스(Zin)는 방정식 (99)를 사용하여 결정될 수 있다. 이러한 공진 관계는 유도 표면파와의 결합을 최대화하는 것으로 고려될 수 있다.
코일(LR)의 조정된 파라미터와 수직 급전 라인 전도체의 길이에 기초하여, 속도 인자, 위상 지연 및 코일(LR)과 수직 급전 라인의 임피던스가 결정될 수 있다. 추가적으로, 충전 단자(TR)의 자기 용량(CR)은 예를 들어 방정식 (24)를 사용하여 결정될 수 있다. 코일(LR)의 전파 인자(βp)는 방정식 (98)을 사용하여 결정될 수 있고, 수직 공급 라인 전도체를 위한 전파 위상 상수(βw)는 방정식 (49)를 사용하여 결정될 수 있다. 수직 공급 라인과 코일(LR)의 자기 용량 및 결정된 값들을 사용하여, 코일(LR) 내로 "올려다본" 관찰된 바와 같은 튜닝형 공진기(306a)의 임피던스(Zbase)가 방정식 (101), (102) 및 (103)을 사용하여 결정될 수 있다.
도 9a의 등가 이미지 평면 모델도 도 18b의 튜닝형 공진기(306a)에 적용된다. 튜닝형 공진기(306a)는 Zbase의 리액턴스 성분(Xbase)이 Zin 의 Xin 의 리액턴스 성분을 소거하도록 또는 Xbase + Xin =0이도록 충전 단자(TR)의 부하 임피던스(ZR)를 조정함으로써 복소 이미지 평면에 관하여 공진하도록 튜닝될 수 있다. 따라서, 튜닝형 공진기(306a)의 코일 내로 "올려다본" 물리적 경계(136)(도 9a)에서의 임피던스는 손실성 전도 매체(203) 내로 "내려다본" 물리적 경계(136)에서의 임피던스의 켤레이다. 부하 임피던스(ZR)는 충전 단자(TR)에 의해 관찰되는 전기적 위상 지연(Φ= θc + θy)을 변경하지 않고 충전 단자(TR)의 용량(CR)을 변경함으로써 조정될 수 있다. 전도성 이미지 그라운드 평면(139)에 관한 등가 이미지 평면 모델의 공진을 위한 부하 임피던스(ZR)를 튜닝하기 위해 반복 접근법이 수행될 수 있다. 이러한 방식으로 손실성 전도 매체(203)(예를 들어, 지구)의 표면을 따른 유도 표면 도파 모드에 대한 전기적 필드의 결합이 개선 및/또는 최대화될 수 있다.
도 19를 참조하면, 자기 코일(309)은 임피던스 매칭 네트워크(333)를 통해 전기적 부하(336)에 결합되는 수신 회로를 포함한다. 유도 표면파로부터의 전력의 수신 및/또는 추출을 용이하게 하기 위해, 자기 코일(309)이 유도 표면파의 자속(Hφ)이 자기 코일(309)을 통과하도록 위치될 수 있으며, 그에 의해, 자기 코일(309)에 전류를 유도하고 그 출력 단자(330)에서 단자 지점 전압을 생성할 수 있다. 단일 권선 코일에 결합된 유도 표면파의 자속은 다음에 의해 표현된다.
여기서, F는 결합된 자속이고, μr은 자기 코일(309)의 코어의 유효 상대 유전율이며, μo는 자유 공간의 유전율이고,  는 입사 자기 필드 강도 벡터이며,
는 입사 자기 필드 강도 벡터이며,  은 권선의 단면적에 수직인 단위 벡터이고, ACS는 각 루프에 의해 둘러싸여진 영역이다. 자기 코일(309)의 단면적에 걸쳐 균일한 입사 자기 필드에 대한 최대 결합을 위해 배향된 N-권선 자기 코일(309)에 대하여, 자기 코일(309)의 출력 단자(330)에서 나타나는 개회로 유도 전압은 다음과 같고,
은 권선의 단면적에 수직인 단위 벡터이고, ACS는 각 루프에 의해 둘러싸여진 영역이다. 자기 코일(309)의 단면적에 걸쳐 균일한 입사 자기 필드에 대한 최대 결합을 위해 배향된 N-권선 자기 코일(309)에 대하여, 자기 코일(309)의 출력 단자(330)에서 나타나는 개회로 유도 전압은 다음과 같고,
여기서 변수는 앞서 규정되어 있다. 자기 코일(309)은 경우에 따라 분산형 공진기로서 또는 그 출력 단자(330)에 걸친 외부 커패시터에 의해 유도 표면파 주파수로 튜닝될 수 있고, 그후, 켤레 임피던스 매칭 네트워크(333)를 통해 외부적 전기적 부하(336)에 임피던스 매칭될 수 있다.
자기 코일(309) 및 전기적 부하(336)가 적절히 조정되고 임피던스 매칭 네트워크(333)를 통해 켤레 임피던스 매칭되는 것을 가정하면, 이때, 자기 코일(309)에 유도된 전류는 전기적 부하(336)에 대한 최적의 전력 공급을 위해 사용될 수 있다. 자기 코일(309)에 의해 표현되는 수신 회로는 그라운드에 물리적으로 연결될 필요가 없다는 장점을 제공한다.
도 18a, 도 18b, 도 18c 및 도 19를 참조하면, 선형 프로브(303)에 의해 표현되는 수신 회로, 모드 매칭된 구조(306) 및 자기 코일(309)은 각각 전술된 유도 표면 도파 프로브(200)의 실시예 중 임의의 것으로부터 전송된 전력의 수신을 용이하게 한다. 이 때문에, 수신 에너지는 알 수 있듯이 켤레 매칭 네트워크를 통해 전기적 부하(315/327/336)에 전력을 공급하는 데 사용될 수 있다. 이것은 방사 전자기 필드의 형태로 전송된, 수신기에서 수신될 수 있는 신호들과 대조적이다. 그러한 신호들은 매우 낮은 이용 가능 전력을 가지며, 그러한 신호들의 수신기들은 송신기들에 부하를 주지 않는다.
선형 프로브(303), 모드 매칭된 구조(306) 및 자기 코일(309)에 의해 제공되는 수신 회로들이 유도 표면 도파 프로브(200)에 인가되는 여기 소스(212)(예를 들어, 도 3, 도 12 및 도 16)에 부하를 주어서, 그러한 수신 회로들에 가해지는 유도 표면파를 생성하는 것은 또한 전술한 유도 표면 도파 프로브들(200)을 이용하여 생성되는 본 유도 표면파들의 특징이다. 이것은 전술한 주어진 유도 표면 도파 프로브(200)에 의해 생성되는 유도 표면파가 송신 라인 모드를 포함한다는 사실을 반영한다. 이와 달리, 방사 전자기파를 생성하는 방사 안테나를 구동하는 전력 소스는 사용되는 수신기들의 수에 관계없이 수신기들에 의해 부하를 받지 않는다.
따라서, 하나 이상의 유도 표면 도파 프로브(200) 및 선형 프로브(303) 형태의 하나 이상의 수신 회로와 함께, 튜닝형 모드 매칭된 구조(306) 및/도는 자기 코일(309)은 무선 분배 시스템을 구성할 수 있다. 전술한 바와 같은 유도 표면 도파 프로브(200)를 이용하는 유도 표면파의 전송의 거리가 주파수에 의존하는 경우, 무선 전력 분배는 넓은 영역들에 걸쳐, 심지어는 전 세계에 걸쳐 달성될 수 있는 것이 가능하다.
오늘날 광범위하게 연구되는 전통적인 무선 전력 송신/분배 시스템들은 방사 필드들로부터의 "에너지 수확" 및 또한 유도 또는 반응 근거리 필드들에 대한 센서 결합을 포함한다. 이와 달리, 본 무선 전력 시스템은 인터셉트되지 않는 한은 영원히 손실되는 방사선 형태의 전력을 낭비하지 않는다. 현재 개시되는 무선 전력 시스템은 전통적인 상호 리액턴스 결합 근거리필드 시스템들에서와 같은 극히 짧은 범위들로 한정되지도 않는다. 본 명세서에서 개시되는 무선 전력 시스템은 파 유도에 의해 부하에 또는 원거리 발전기에 직접 결선된 부하에 전력을 전달하는 것과 등가인 새로운 표면 유도 전송 라인 모드에 프로브 결합된다. 전송 필드 강도를 유지하는 데 필요한 전력 및 60 Hz에서의 전통적인 고압 전력 라인들에서의 전송 손실들에 비해 매우 낮은 주파수들에서 사소한, 표면 도파로에서 방산되는 전력과 전송 필드 강도를 유지하기 위해 요구되는 전력을 제외하고는, 모든 발전기 전력이 원하는 전기적 부하로만 간다. 전기적 부하 요구가 종료될 때, 소스 전력 생성은 비교적 유휴상태가 된다.
다음에, 도 20a 내지 도 20e를 참조하면, 다음의 설명에 대한 참조로 사용되는 다양한 도식 기호의 예들이 도시되어 있다. 특히 도 20a를 참조하면, 유도 표면 도파 프로브( 200a, 200b, 200c, 200e, 200d 또는 200f) 중 임의의 하나 또는 그 임의의 변형을 나타내는 기호가 도시되어 있다. 이하의 도면과 설명에서, 이 기호의 서술은 유도 표면 도파 프로브(P)로서 언급될 것이다. 이하의 설명에서 간결성을 위해, 유도 표면 도파 프로브(P)에 대한 임의의 언급은 유도 표면 도파 프로브(200a, 200b, 200c, 200e, 200d 또는 200f) 중 임의의 것 또는 그 변형에 대한 언급이다.
유사하게, 도 20b를 참조하면, 선형 프로브(303)(도 18a), 튜닝형 공진기(306)(도 18b 및 도 18c) 또는 자기 코일(309)(도 19) 중 임의의 것을 포함할 수 있는 유도 표면파 수신 구조체를 나타내는 기호가 도시되어 있다. 이하의 도면과 설명에서, 이 기호의 서술은 유도 표면파 수신 구조체(R)로서 언급될 것이다. 이하의 설명의 간결성을 위해, 유도 표면파 수신 구조체(R)에 대한 임의의 언급은 선형 프로브(303), 튜닝형 공진기(306) 또는 자기 코일(309) 중 임의의 하나나 그 변형들에 대한 언급이다.
또한, 도 20c를 참조하면, 선형 프로브(303)(도 18a)를 특정하게 나타내는 기호가 도시되어 있다. 이하의 도면과 설명에서, 이 기호의 서술은 유도 표면파 수신 구조체(RP)로서 언급될 것이다. 이하의 설명의 간결성을 위해, 유도 표면파 수신 구조체(RP)에 대한 임의의 언급은 선형 프로브(303) 또는 그 변형들에 대한 언급이다.
또한, 도 20d를 참조하면, 튜닝형 공진기(306)(도 18b 및 도 18c)를 특정하게 나타내는 기호가 도시되어 있다. 이하의 도면과 설명에서, 이 기호의 서술은 유도 표면파 수신 구조체(RR)로서 언급될 것이다. 이하의 설명의 간결성을 위해, 유도 표면파 수신 구조체(RR)에 대한 임의의 언급은 튜닝형 공진기(306) 또는 그 변형들에 대한 언급이다.
또한, 도 20e를 참조하면, 자기 코일(309)(도 19)을 특정하게 나타내는 기호가 도시되어 있다. 이하의 도면과 설명에서, 이 기호의 서술은 유도 표면파 수신 구조체(RM)로서 언급될 것이다. 이하의 설명의 간결성을 위해, 유도 표면파 수신 구조체(RM)에 대한 임의의 언급은 자기 코일(309) 또는 그 변형들에 대한 언급이다.
무선 검출 및 측위(ranging) 또는 레이더가 사용되어 그 경로 내의 임의의 대상물에 의해 반사되는 전자기파(예를 들어, 무선파, 마이크로웨이브 등)를 전송함으로써 대상물을 검출하기 위해 사용될 수 있다. 전송된 파는 대상물과 접촉(또는 그를 조명)할 때 반사 또는 산란된다. 전송기 또는 별도의 수신기로 되반사(또는 후방산란)되는 파가 수신 및 처리되어 대상물의 특성(예를 들어, 베어링, 범위, 각도, 속도 등)을 결정할 수 있다. 대상물이 수신기를 향해 또는 수신기로부터 이격방향으로 이동하는 경우, 도플러 효과에 의해 유발되는 파의 주파수의 미소한 변화가 존재한다.
두 개의 서로 다른 물질(예를 들어, 공기 중의 고체 대상물) 또는 두 개의 서로 다른 밀도 사이의 경계로부터 전자기파는 산란 또는 반사된다. 대상물 크기보다 짧은 파장을 갖는 파는 거울의 빛반사와 유사하게 반사될 것이다. 파장이 대상물 크기보다 더 긴 경우, 대상물은 열악한 반사를 초래할 수 있다. 이들 더 긴 파장에서, 대상물은 라일리(Rayleigh) 산란을 통해 검출될 수 있다. 레이더는 공기중, 해양, 지상 트래픽 검출 및 제어, 공중 방어, 네비게이션, 감시, 탐사 및/또는 다른 용례에 사용될 수 있다.
유도 표면 도파 프로브(200)는 대상물의 검출을 위해 사용될 수 있는 표면 유도파를 전송하기 위해 사용될 수 있다. 유도 표면 도파 모드를 매칭시킴으로써, 유도 표면파가 손실성 전도 매체(203)(예를 들어, 지상 매체) 상에서 발진될 수 있다. 설명한 바와 같이, 유도 표면파의 필드 강도는 유도 표면 도파 프로브(200)의 상승된 자유 전하(또는 유도 표면 도파 프로브(200)의 충전 단자(들)에 인가된 전압)에 비례한다. 지상파는 지상 표면(또는 전도 매체(203))에 인접하면서 그에 평행한 전자기파의 전파를 지칭한다.
유도파 및 방사 전파에 대한 필드 강도 곡선에 관련하여 전술한 바와 같이, 방사 필드의 필드 강도는 기하학적으로(1/d, 여기서 d는 거리) 강하하는 반면, 유도파 필드의 필드 강도는  의 특성적 지수적 쇠퇴를 가지며, 뚜렸한 굴곡형상을 나타낸다. 유도 필드 강도 곡선(103)과 방사 필드 강도 곡선(106)이 교차하는 크로싱 거리(도 1의 지점(112)) 미만의 거리에서, 유도 전자기 필드의 필드 강도는 방사 전자기 필드의 필드 강도보다 대부분의 위치에서 현저히 더 크다. 이 때문에, 원격 위치된 대상물로부터의 결과적 후방산란은 방사 레이더 파로부터 보다 유도 표면파로부터 더 강할 것이다.
의 특성적 지수적 쇠퇴를 가지며, 뚜렸한 굴곡형상을 나타낸다. 유도 필드 강도 곡선(103)과 방사 필드 강도 곡선(106)이 교차하는 크로싱 거리(도 1의 지점(112)) 미만의 거리에서, 유도 전자기 필드의 필드 강도는 방사 전자기 필드의 필드 강도보다 대부분의 위치에서 현저히 더 크다. 이 때문에, 원격 위치된 대상물로부터의 결과적 후방산란은 방사 레이더 파로부터 보다 유도 표면파로부터 더 강할 것이다.
이 증가된 필드 강도는 그라운드 레이더 검출에 유용할 수 있다. 예로서, 유도 표면파가 지상 매체 상에서 발진되고 지상 매체의 표면에 근접 및/또는 지상 매체 상에 위치된 대상물, 그리고, 지상 매체의 표면 아래에 위치될 수 있는 대상물을 조명할 수 있다. 설명한 바와 같이, Maxwell 방정식의 Zenneck 해는 다음의 전기 필드 및 자기 필드 성분에 의해 표현될 수 있다. ρ≠0 및 z≥0인 지상 매체의 표면에서 또는 그 위에서(공기중), 필드는 아래에 재현되어 있는 방정식 (1)-(3)에 의해 설명된다.
(z는 표면에 수직인 수직 좌표이고, ρ는 원기둥 좌표의 반경방향 치수임). ρ≠0 및 z≤0인 지상 매체의 표면에서 또는 그 아래에서, 필드는 아래에 재현되어 있는 방정식 (4)-(6)에 의해 설명된다.
따라서, 지상 매체 상에서 발진되는 유도 표면파는 표면 위 및 아래에 위치되는 필드를 포함하고, 이는 모니터링된 환경의 특징의 변동 및/도는 대상물 원격 검출을 위해 사용될 수 있다.
도 21을 참조하면, 유도 표면 도파 프로브(200) 및 단극 안테나의 그라운드 방사 필드의 예의 도식적 표현이 도시되어 있다. 양 경우에, 그라운드 방사선은 안테나 또는 폴 주변에서 전방향적이다. 전송된 방사선은 손실성 전도 매체(203) 상에 또는 그에 근접하게 위치된 대상물에 의해 반사 및/또는 산란될 수 있다.
단극 안테나에 대하여, 그라운드 방사선(403)은 최소치로 되돌아가기 이전에 아테나로부터 최대 지점까지 사인곡선형으로 증가한다. 그러나, 지구 같은 손실성 전도 매체 위에서, 수평선 또는 수평선의 1-2도 이내에서, 방사 안테나를 사용한 필드의 방사 전송은 지상 매체의 표면에 근접한 필드 강도를 현저히 감소시키는 감쇠(또는 널(null))을 나타낸다. 이러한 현상은 통상적으로 "수평선 상의 널" 현상이라 지칭되며, 그라운드의 표면에 근접하거나 표면 상에 있는 대상물의 검출을 방해할 수 있다. 섹션(406)은 "수평선 상의 널" 현상으로부터 초래되는 널을 예시한다.
대조적으로, 유도 표면 도파 프로브(200)에 의해 발진된 표면 유도파는 손실성 전도 매체(203)의 표면에서 방사 필드(409)를 생성한다. 이는 그라운드 상에 및/또는 그라운드에 근접하게 위치된 대상물의 저각 조명(low angle illumination)을 제공할 수 있다. 예로서, 유도 표면 도파 프로브(200)에 의해 발진된 표면 유도파를 사용한 레이더는 지구의 표면 상의 수송체나 다른 대상물의 검출을 위해, 모니터링되는 공간 또는 영역에 진입하는 저공 비행 항공기 또는 다른 비행 대상물의 검출 및/또는 토네이도, 빙산 또는 다른 자연적으로 발생하는 이벤트나 대상물 같은 지면 부근 현상의 검출을 위해 사용될 수 있다.
필드 강도가 곡선의 굴곡형상 외측에서 크게 유지되기 때문에, 유도 표면파는 "수평선 상의 널" 현상에 의해 영향을 받지 않고 대상물을 검출하기 위해 사용될 수 있다. 추가적으로, 유도 표면파의 필드 강도는 도 21에 도시된 바와 같은 방사파와 동일한 방식으로 강하하지 않기 때문에, 유도 표면파 프로브(200)를 사용하여 유도 표면 도파 모드로 전송함으로써 지표면을 따른 검출 범위가 연장될 수 있다. 필드가 손실성 전도 매체(203)의 표면에 수직인 방향으로 지수적으로 쇠퇴하기 때문에, 감쇠는 표면으로부터 더 멀리 있는 대상물의 검출을 방해한다. 그러나, 도 21로부터 볼 수 있는 바와 같이, 종래의, 그리고, 지상파 레이더의 조합은 수평선(또는 심지어 수평선을 초과하여)으로부터 상방의 전체 영역을 효과적으로 커버하도록 사용될 수 있다.
유도 표면 도파 프로브(들)(200)은 펄스형 반송파 및/또는 주파수 변조 연속파(FMCW) 방법을 사용한 레이더 검출을 위해 사용될 수 있다. 펄스형 반송파 레이더에 대하여, 유도 표면 도파 프로브(200)는 규정된 반복 기간에서 일련의 유도 표면파를 발진시킨다. 유도 표면파 각각은 사전규정된 기간(또는 펄스 폭) 동안 전송된다. 전송 신호의 펄스 폭은 수신기에 의한 대상물로부터의 후방산란을 가능하게 하기에 충분한 에너지를 레이더가 방출하는 것을 보증하도록 선택된다. 원거리 대상물에 전달되는 에너지의 양은 유도 표면파의 필드 강도 및/또는 전송 기간에 의해 영향을 받을 수 있다. 거리 판별도 펄스 기간에 의해 영향을 받을 수 있다. 대상물 감지 능력을 향상시키기 위해, 펄스는 규정된 반복율로 발진될 수 있다. 대상물로부터의 검출된 후방산란은 그후 새로운 펄스가 전송될 때마다 신호 프로세서 내에서 적분되고 그에 의해 검출을 보강한다.
FMCW 레이더에 대하여, 유도 표면파는 변조 신후에 의해 고정된 시간 주기에 걸쳐 주파수 상승 및 하강 변화된다. 유도 표면파와 대상물로부터의 후방산란 사이의 주파수 차이는 지연에 따라, 그리고, 따라서, 거리에 따라 증가한다. 대상물로부터의 후방산란은 전송된 유도 표면파 신호와 혼합되어 비트 신호를 생성할 수 있고, 이 비트 신호는 복조 이후 타겟의 거리를 제공할 수 있다. 다른 유형의 신호도 대상물의 레이더 검출을 위해 유도 표면 도파 프로브(200)에 의해 발진될 수 있다. 예로서, 합성 펄스 레이더가 사용되어 전송된 신호의 중첩이 펄스 형상을 생성하도록 상이한 주파수의 일련의 펄스형 유도 표면파를 발진시킴으로써 펄스 형상을 구성할 수 있다. 펄스 형상이 발진된 유도 표면파의 중첩이기 때문에, 유도 표면파는 프로브의 프로파일을 감쇠킬 수 있는 더 낮은 레벨에서 전송될 수 있다. 대상물로부터의 후방산란 신호를 조합하기 위해 중첩을 사용함으로써, 펄스 형상에 대한 응답이 평가를 위해 재구성될 수 있다.
이제 도 22를 참조하면, 하나 이상의 유도 표면 도파 프로브(들)(200)를 포함하는 레이더 시스템(500)의 일 예가 도시되어 있다. 유도 표면 도파 프로브(200)는 전술한 바와 같이 지상 매체의 표면을 따라 유도 표면파(503)를 발진시킬 수 있다. 유도 표면 도파 프로브(200)는 하나 이상의 충전 단자에 공급하는 여기 소스(212)(예를 들어, 도 3, 도 12 및 도 16)로서 전송기를 포함할 수 있다. 전송기는 여기 신호를 생성하기 위한 발진기(예를 들어, 클라이스트론 또는 마그네트론)와 여기 신호의 기간을 제어하기 위한 변조기를 포함할 수 있다. 전송기에 의한 여기시, 유도 표면파가 프로브에 의해 발진될 수 있다. 유도 표면파(503)가 원격 위치된 대상물(506)(또는 다른 특징)을 지나갈 때, 필드의 일부가 대상물에 의해 후방산란(509)으로서 반사된다.
전송된 신호가 후방산란(509)으로서 반사될 때, 하나 이상의 종래의 수신기(들)(512)을 사용하여 검출될 수 있다. 수신기(512)는 수신된 후방산란 신호를 처리하기 위한 수신기 회로와 하나 이상의 안테나(들)를 포함할 수 있다. 안테나는 조향가능한 포물선 접시 안테나, 슬롯 도파관 안테나, 페이즈드 어레이 안테나 또는 다른 적절한 안테나일 수 있다. 일부 구현예에서, 안테나의 어레이가 후방산란(509)의 지향성 감지를 위해 사용될 수 있다. 조명 각도로 인해, 대상물(506)에 의해 역방향 반사된 에너지는 또한 작은 각도로 존재할 수 있고, 이는 수신기(512)에 의한 검출을 향상시킬 수 있다. 일부 경우에, 수신기(512)는 대상물(506)에 더 근접하게 위치되거나 이동될 수 있는 항공기 또는 다른 이동 수송체 상에 위치될 수 있다. 이는 반사가 이동하는 복귀 거리를 감소시킴으로써 후방산란(509)의 검출을 도울 수 있다.
개별 유도 표면 도파 프로브(200)는 모든 방향에서 손실성 전도 매체(203)의 표면을 따라 전파하는 전방향성 유도 표면파를 발진시킨다. 대상물로부터의 후방산란(509)은 그후 대상물(506)의 위치를 결정하기 위해 처리될 수 있다. 수신기(512)에 의해 수신된 후방산란을 평가함으로써, 대상물(506)(그리고 다른 특징 또는 특성부)까지의 거리가 결정될 수 있다. 처리가 수신기(512)에서 로컬로 수행될 수 있거나 후방산란 정보가 정보의 결정을 위한 원격 위치로 통신될 수 있다. 복수의 수신기(512)(또는 안테나의 어레이)를 사용함으로써, 대상물(506)의 위치가 삼각법을 사용하여 결정될 수 있다. 다수의 대상물(506)이 존재하는 경우, 각 대상물(506)로부터의 후방산란(509)이 하나 이상의 수신기(512)에 의해 검출되고 대상물(506)의 거리, 위치 및/또는 다른 특성을 결정하기 위해 사용될 수 있다.
추가적으로, 유도 표면 도파 프로브(200)의 어레이는 유도 표면파를 집속 및/또는 지향시키고 및/또는 원하는 방향에서 필드 강도를 증가시키기 위해 사용될 수 있다. 유도 표면파는 원하는 전송 패턴을 생성하기 위해 구성적으로 및/또는 파괴식으로 간섭할 수 있다. 예로서, 복수의 유도 표면 도파 프로브(200)가 서로 사전규정된 거리(예를 들어, λ04, λ02 등)에 및/또는 규정된 패턴(예를 들어, 선형, 삼각형 정사각형 등)으로 위치될 수 있고, 하나 이상의 방향에서 전송 노드를 생성하도록 제어될 수 있다. 일부 경우에, 유도 표면 도파 프로브(200)는 유도 표면파가 동일한 프로브를 사용하여 다양한 방향으로 발진될 수 있도록 제어될 수 있다. 일부 실시예에서, 전송 지연은 표면파가 발진되는 방향을 조정하기 위해 또는 원하는 방향으로 유도 표면파를 조종하기 위해 제어될 수 있다.
도 22의 예에 관하여, 원하는 반복율로 규정된 펄스 기간을 갖는 일련의 펄스형 유도 표면파를 발진하도록 구성된 단일 유도 표면 도파 프로브(200)를 고려한다. 유도 표면파 펄스(503)가 그라운드의 표면을 따라 이동할 때, 필드의 일부가 표면 상의 또는 표면 부근의 임의의 대상물(506)에 의해 반사된다. 대상물(506)로부터의 후방산란(509)이 그후 수신기(512)에 의해 수신되고 대상물(506)의 다양한 특성을 결정하기 위해 처리될 수 있다. 예로서, 대상물(506)의 위치 및 대상물까지의 거리가 결정될 수 있다. 펄스 기간이 더 길수록 더 많은 에너지를 전달할 수 있고, 대상물(506)로부터의 후방산란(509)의 레벨을 증가시킬 수 있다. 추가적으로, 펄스형 유도 표면파들은 발진된 유도 표면파가 유도 필드 강도 곡선(103)(도 1)의 굴곡형상(109)에 도달하고 수신기(512)로 반환되도록 후방산란될 수 있게 하도록 충분한 간격으로 존재할 수 있다. 이는 유도 표면파에 의한 후방산란의 간섭을 피할 수 있게 한다.
본 개시 내용의 전술한 실시예들은 본 개시 내용의 원리들의 명확한 이해를 위해 설명되는 구현들의 가능한 예들일 뿐이라는 것이 강조되어야 한다. 본 개시 내용의 사상 및 원리로부터 실질적으로 벗어나지 않고서 전술한 실시예(들)에 대하여 많은 변형 및 수정이 이루어질 수 있다. 모든 그러한 수정들 및 변경들은 본 개시 내용의 범위 내에 포함되고, 아래의 청구항들에 의해 보호되는 것을 의도한다. 추가적으로, 설명된 실시예의 모든 선택적인, 그리고, 양호한 특징과 변형은 본 명세서에서 고려되는 개시내용의 모든 양태에서 사용가능하다. 또한, 종속 청구항의 개별적 특징과 설명된 실시예의 모든 선택적이고 양호한 특징 및 변형은 서로 조합될 수 있으며, 그리고, 서로 교체가능하다.
Claims (20)
- 시스템으로서,
손실성 매체의 표면을 따라 유도 표면파를 발진시키도록 구성된 유도 표면 도파 프로브; 및
상기 유도 표면파에 의해 조명되는 원격 위치된 대상물에 의해 반사되는 후방산란을 수신하도록 구성된 수신기를 포함하는 시스템. - 제1항에 있어서, 상기 유도 표면 도파 프로브는 손실성 전도 매체 위로 상승되어 있는 충전 단자를 포함하고, 상기 충전 단자는 상기 손실성 전도 매체의 복소 브루스터 입사각(θi,B)에서 입사되는 파면을 합성하는 적어도 하나의 결과적 필드를 생성하도록 구성되는 시스템.
- 제1항 또는 제2항에 있어서, 상기 충전 단자는 복수의 충전 단자들 중 하나인 시스템.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 유도 표면 도파 프로브는 상기 충전 단자에 전기적으로 결합된 급전 네트워크를 포함하고, 상기 급전 네트워크는 상기 유도 표면 도파 프로브의 부근에서 상기 손실성 전도 매체와 연계된 복소 브루스터 입사각(θi,B)과 연계된 파 경사각(ψ)과 매칭되는 위상 지연(Φ)을 제공하는 시스템.
- 제4항에 있어서, 상기 충전 단자는 복수의 충전 단자들 중 하나인 시스템.
- 제1항 내지 제5항 중 어느 한 항에 있어서, 상기 급전 네트워크는 상기 복수의 충전 단자들에 복수의 위상들 및 복수의 전압 크기들을 부여하여 복수의 필드들을 합성하도록 구성되고, 상기 복수의 필드들은 상기 손실성 전도 매체의 유도 표면 도파 모드와 매칭되고, 그에 의해, 상기 유도 표면파를 발진시키는 시스템.
- 제1항 내지 제6항 중 어느 한 항에 있어서, 상기 유도 표면 도파 프로브는 규정된 반복율로 규정된 펄스 기간을 갖는 일련의 유도 표면파들을 발진시키도록 구성되는 시스템.
- 제1항 내지 제6항 중 어느 한 항에 있어서, 상기 유도 표면파는 주파수 변조 연속파인 시스템.
- 제1항 내지 제8항 중 어느 한 항에 있어서, 상기 원격 위치된 대상물은 상기 손실성 전도 매체의 상기 표면 상에 존재하는 시스템.
- 제1항 내지 제8항 중 어느 한 항에 있어서, 상기 원격 위치된 대상물은 상기 손실성 전도 매체의 상기 표면 위쪽에 존재하는 시스템.
- 제10항에 있어서, 상기 원격 위치된 대상물은 저공 비행 항공기인 시스템.
- 제1항 내지 제11항 중 어느 한 항에 있어서, 복수의 유도 표면 도파 프로브들을 포함하고, 상기 복수의 유도 표면 도파 프로브들은 상기 손실성 전도 매체의 상기 표면을 따라 유도 표면파들을 발진시키도록 구성되는 시스템.
- 제1항 내지 제12항 중 어느 한 항에 있어서, 복수의 수신기들을 포함하고, 상기 복수의 수신기들은 상기 유도 표면파에 의해 조명되는 상기 원격 위치된 대상물에 의해 반사되는 후방산란을 수신하도록 구성되는 시스템.
- 제1항 내지 제13항 중 어느 한 항에 있어서, 상기 손실성 전도 매체는 지상 매체인 시스템.
- 제1항 내지 제14항 중 어느 한 항에 있어서, 상기 수신기를 포함하는 이동 수송체를 포함하는 시스템.
- 방법으로서,
유도 표면 도파 프로브의 충전 단자를 여기시킴으로써 손실성 전도 매체의 표면을 따라 유도 표면파를 발진시키는 단계; 및
상기 유도 표면파에 의해 조명되는 원격 위치된 대상물에 의해 반사되는 후방산란을 수신하는 단계를 포함하는 방법. - 제16항에 있어서, 상기 충전 단자의 여기는 상기 손실성 전도 매체의 복소 브루스터 입사각(θi,B)에서 입사되는 파면을 합성하는 결과적 필드를 생성하는 방법.
- 제16항 또는 제17항에 있어서, 상기 유도 표면 도파 프로브는 상기 충전 단자에 전기적으로 결합된 급전 네트워크를 포함하고, 상기 급전 네트워크는 상기 유도 표면 도파 프로브의 부근에서 상기 손실성 전도 매체와 연계된 복소 브루스터 입사각(θi,B)과 연계된 파 경사각(ψ)과 매칭되는 위상 지연(Φ)을 제공하는 방법.
- 제16항 내지 제18항 중 어느 한 항에 있어서, 상기 유도 표면 도파 프로브는 규정된 반복율로 규정된 펄스 기간을 갖는 일련의 유도 표면파들을 발진시키도록 구성되는 방법.
- 제16항 내지 제19항 중 어느 한 항에 있어서, 적어도 부분적으로 상기 후방산란에 기초하여 상기 원격 위치된 대상물의 특성을 결정하는 단계를 포함하는 방법.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462049209P | 2014-09-11 | 2014-09-11 | |
| US62/049,209 | 2014-09-11 | ||
| US14/848,705 | 2015-09-09 | ||
| US14/848,705 US10101444B2 (en) | 2014-09-11 | 2015-09-09 | Remote surface sensing using guided surface wave modes on lossy media |
| PCT/US2015/049505 WO2016040689A1 (en) | 2014-09-11 | 2015-09-10 | Remote surface sensing using guided surface wave modes on lossy media |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170056540A true KR20170056540A (ko) | 2017-05-23 |
Family
ID=55454549
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177006659A KR20170056540A (ko) | 2014-09-11 | 2015-09-10 | 손실성 매체 상의 유도 표면파 모드를 사용한 원격 표면 감지 |
Country Status (13)
| Country | Link |
|---|---|
| US (2) | US10101444B2 (ko) |
| EP (1) | EP3191866A1 (ko) |
| JP (1) | JP2017534847A (ko) |
| KR (1) | KR20170056540A (ko) |
| CN (1) | CN106796287A (ko) |
| AU (1) | AU2015314920B2 (ko) |
| BR (1) | BR112017004918A2 (ko) |
| EA (1) | EA201790581A1 (ko) |
| IL (1) | IL250774A0 (ko) |
| MA (1) | MA40398A (ko) |
| MX (1) | MX362460B (ko) |
| SG (1) | SG11201701373SA (ko) |
| WO (1) | WO2016040689A1 (ko) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10175203B2 (en) * | 2014-09-11 | 2019-01-08 | Cpg Technologies, Llc | Subsurface sensing using guided surface wave modes on lossy media |
| US10498393B2 (en) * | 2014-09-11 | 2019-12-03 | Cpg Technologies, Llc | Guided surface wave powered sensing devices |
| CA2997733A1 (en) * | 2015-09-10 | 2017-03-16 | Cpg Technologies, Llc. | Global time synchronization using a guided surface wave |
| US10727583B2 (en) * | 2017-07-05 | 2020-07-28 | At&T Intellectual Property I, L.P. | Method and apparatus for steering radiation on an outer surface of a structure |
| WO2020205606A1 (en) * | 2019-04-02 | 2020-10-08 | The Curators Of The University Of Missouri | Microwave imaging using a radially-polarized probe |
| JP7132167B2 (ja) * | 2019-04-08 | 2022-09-06 | 株式会社Soken | レーダ装置及びレーダ装置用ブラケット |
Family Cites Families (151)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3123767A (en) | 1964-03-03 | Uator | ||
| GB189620981A (en) | 1896-09-22 | 1896-11-21 | Nikola Tesla | Improvements relating to the Production, Regulation, and Utilization of Electric Currents of High Frequency, and to Apparatus therefor. |
| US645576A (en) | 1897-09-02 | 1900-03-20 | Nikola Tesla | System of transmission of electrical energy. |
| GB189824421A (en) | 1898-11-19 | 1899-03-04 | George Frederick Baker | An Improved Curtain Rod. |
| US685953A (en) | 1899-06-24 | 1901-11-05 | Nikola Tesla | Method of intensifying and utilizing effects transmitted through natural media. |
| US685955A (en) | 1899-06-24 | 1901-11-05 | Nikola Tesla | Apparatus for utilizing effects transmitted from a distance to a receiving device through natural media. |
| US685956A (en) | 1899-08-01 | 1901-11-05 | Nikola Tesla | Apparatus for utilizing effects transmitted through natural media. |
| US685954A (en) | 1899-08-01 | 1901-11-05 | Nikola Tesla | Method of utilizing effects transmitted through natural media. |
| US685012A (en) | 1900-03-21 | 1901-10-22 | Nikola Tesla | Means for increasing the intensity of electrical oscillations. |
| US787412A (en) | 1900-05-16 | 1905-04-18 | Nikola Tesla | Art of transmitting electrical energy through the natural mediums. |
| US725605A (en) | 1900-07-16 | 1903-04-14 | Nikola Tesla | System of signaling. |
| GB190111293A (en) | 1901-06-01 | 1901-11-02 | Nikola Tesla | Improvements relating to the Utilization of Electromagnetic, Light, or other like Radiations Effects or Disturbances transmitted through the Natural Media and to Apparatus therefor. |
| GB190113563A (en) | 1901-07-03 | 1901-11-09 | Nikola Tesla | Improvements in, and relating to, the Transmission of Electrical Energy. |
| GB190214579A (en) | 1902-06-30 | 1902-12-18 | Joseph William Cunningham | Improvements in Mills for Grinding Grain |
| GB190508200A (en) | 1905-04-17 | 1906-04-17 | Nikola Tesla | Improvements relating to the Transmission of Electrical Energy. |
| US851336A (en) | 1905-06-27 | 1907-04-23 | Georg Von Arco | Transmitter for wireless telegraphy. |
| US1119732A (en) | 1907-05-04 | 1914-12-01 | Nikola Tesla | Apparatus for transmitting electrical energy. |
| US1452849A (en) | 1921-12-13 | 1923-04-24 | Rca Corp | Wireless transmitting station |
| US1691338A (en) | 1923-10-05 | 1928-11-13 | Westinghouse Electric & Mfg Co | Aerial system |
| US1652516A (en) | 1924-12-23 | 1927-12-13 | Westinghouse Electric & Mfg Co | Radio transmitting system |
| US1947256A (en) | 1930-01-11 | 1934-02-13 | Bell Telephone Labor Inc | Antenna counterpoise system |
| BE554252A (ko) | 1950-03-21 | |||
| US2921277A (en) | 1956-07-13 | 1960-01-12 | Surface Conduction Inc | Launching and receiving of surface waves |
| US3219954A (en) | 1957-05-31 | 1965-11-23 | Giovanni P Rutelli | Surface wave transmission system for telecommunication and power transmission |
| FR1604503A (ko) | 1960-05-31 | 1971-11-29 | ||
| US3582838A (en) | 1966-09-27 | 1971-06-01 | Zenith Radio Corp | Surface wave devices |
| US3445844A (en) | 1968-01-11 | 1969-05-20 | Raytheon Co | Trapped electromagnetic radiation communications system |
| US3742511A (en) | 1971-06-15 | 1973-06-26 | Smith Electronics Inc | Low-loss antenna system with counterpoise insulated from earth |
| US3742509A (en) | 1971-11-11 | 1973-06-26 | Raytheon Co | Subsurface traveling wave antenna |
| GB1471860A (en) | 1974-07-02 | 1977-04-27 | Plessey Co Ltd | Radio antenna incorporating low-loss high relative permittivity dielectric material |
| US4751515A (en) | 1980-07-09 | 1988-06-14 | Corum James F | Electromagnetic structure and method |
| US4808950A (en) | 1986-10-06 | 1989-02-28 | Sanders Associates, Inc. | Electromagnetic dispersive delay line |
| GB8802204D0 (en) | 1988-02-02 | 1988-03-02 | Hately M C | Twin feeder crossed field antenna systems |
| IL89468A (en) | 1989-03-03 | 1994-08-26 | Gamzon Eliyahu | Method and system for supporting an airborne vehicle in space |
| US5045825A (en) | 1990-07-05 | 1991-09-03 | Hewlett-Packard Company | Coupling port for multiple capacitor, distributed inductor resonator |
| US5293308A (en) | 1991-03-26 | 1994-03-08 | Auckland Uniservices Limited | Inductive power distribution system |
| US5301096A (en) | 1991-09-27 | 1994-04-05 | Electric Power Research Institute | Submersible contactless power delivery system |
| KR100265468B1 (ko) | 1992-01-03 | 2000-09-15 | 칼 하인쯔 호르닝어 | 수동 표면파 센서 |
| DE69313631T2 (de) | 1992-05-08 | 1998-02-05 | Uniline Ltd | Verfahren und gerät zur übertragung von elektrischer leistung über eine einzige leitung |
| US6075498A (en) | 1993-01-08 | 2000-06-13 | American Nucleonics Corp. | Surface wave directional detection system and method |
| JPH06225481A (ja) | 1993-01-21 | 1994-08-12 | Takeo Oe | 水中電気機器用の無線方式電力供給装置 |
| GB2288914A (en) | 1994-04-26 | 1995-11-01 | Maurice Clifford Hately | Radio antenna |
| US5835067A (en) | 1994-04-28 | 1998-11-10 | Goodman; Edward A. | Short vertical 160 meter band antenna |
| AUPN115695A0 (en) | 1995-02-16 | 1995-09-14 | Commonwealth Of Australia, The | A radar receiving system |
| US5714917A (en) | 1996-10-02 | 1998-02-03 | Nokia Mobile Phones Limited | Device incorporating a tunable thin film bulk acoustic resonator for performing amplitude and phase modulation |
| US5920261A (en) | 1996-12-31 | 1999-07-06 | Design Vision Inc. | Methods and apparatus for tracking and displaying objects |
| KR100216885B1 (ko) | 1997-07-25 | 1999-09-01 | 윤덕용 | 전기장 센서 |
| PT929926E (pt) | 1997-08-08 | 2007-03-30 | Jurgen G Meins | Processo e aparelho para fornecer energia sem contacto |
| GB9718311D0 (en) | 1997-08-30 | 1997-11-05 | Hately Maurice C | Dual loop radio antenna |
| RU2143775C1 (ru) | 1999-03-25 | 1999-12-27 | Стребков Дмитрий Семенович | Способ и устройство для передачи электрической энергии |
| RU2161850C1 (ru) | 1999-07-14 | 2001-01-10 | Стребков Дмитрий Семенович | Способ и устройство передачи электрической энергии |
| US6864849B2 (en) | 2000-05-23 | 2005-03-08 | Robert T. Hart | Method and apparatus for creating an EH antenna |
| US6486846B1 (en) | 2000-05-23 | 2002-11-26 | Robert T. Hart | E H antenna |
| RU2183376C2 (ru) | 2000-07-03 | 2002-06-10 | Стребков Дмитрий Семенович | Способ и устройство для передачи электрической энергии (варианты) |
| US6650556B2 (en) | 2001-10-31 | 2003-11-18 | Intel Corporation | Multi-phase DC—DC converter |
| AU2003217075A1 (en) | 2002-04-13 | 2003-11-03 | Maurice Clifford Hately | Crossed-field radio antenna |
| RU2255406C2 (ru) | 2003-02-21 | 2005-06-27 | Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ГНУ ВИЭСХ) | Способ и устройство для передачи электрической энергии |
| US7068234B2 (en) | 2003-05-12 | 2006-06-27 | Hrl Laboratories, Llc | Meta-element antenna and array |
| JP3924263B2 (ja) | 2003-06-09 | 2007-06-06 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波診断装置 |
| US6956535B2 (en) | 2003-06-30 | 2005-10-18 | Hart Robert T | Coaxial inductor and dipole EH antenna |
| US7280033B2 (en) | 2003-10-15 | 2007-10-09 | Current Technologies, Llc | Surface wave power line communications system and method |
| US7834813B2 (en) | 2004-10-15 | 2010-11-16 | Skycross, Inc. | Methods and apparatuses for adaptively controlling antenna parameters to enhance efficiency and maintain antenna size compactness |
| RU2273939C1 (ru) | 2004-12-01 | 2006-04-10 | Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ГНУ ВИЭСХ) | Способ и устройство для передачи электрической энергии |
| KR101225519B1 (ko) | 2004-12-13 | 2013-01-24 | 인테스트 코포레이션 | 반사가 감소된 신호 모듈 |
| US9118216B2 (en) | 2005-02-18 | 2015-08-25 | Cpg Technologies, Llc | Parametric power multiplication |
| CN1664611A (zh) | 2005-03-24 | 2005-09-07 | 武汉大学 | 一种基于非直线天线阵列的无源通道校正方法 |
| CN101258658B (zh) | 2005-07-12 | 2012-11-14 | 麻省理工学院 | 无线非辐射能量传递 |
| US7825543B2 (en) | 2005-07-12 | 2010-11-02 | Massachusetts Institute Of Technology | Wireless energy transfer |
| US7586384B2 (en) | 2005-08-15 | 2009-09-08 | Nokia Corporation | Integrated load impedance sensing for tunable matching networks |
| US7278315B1 (en) * | 2005-10-04 | 2007-10-09 | Op Tech Ventures Llc | Laser-ultrasonic detection of subsurface defects in processed metals |
| US7307589B1 (en) | 2005-12-29 | 2007-12-11 | Hrl Laboratories, Llc | Large-scale adaptive surface sensor arrays |
| RU2310964C1 (ru) | 2006-02-10 | 2007-11-20 | Российская Академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ГНУ ВИЭСХ РОССЕЛЬХОЗАКАДЕМИИ) | Способ и устройство для передачи электрической энергии |
| JP4278061B2 (ja) | 2006-03-06 | 2009-06-10 | 国立大学法人京都大学 | 建物内無線電力伝送システム |
| US7782264B1 (en) | 2006-03-28 | 2010-08-24 | The Board Of Governors For Higher Education, State Of Rhode Island And Providence Plantations | Systems and methods for providing distributed load monopole antenna systems |
| WO2007146164A2 (en) | 2006-06-14 | 2007-12-21 | Powercast Corporation | Wireless power transmission |
| RU2341860C2 (ru) | 2006-07-04 | 2008-12-20 | Виктор Иванович Петрик | Способ и устройство для передачи электрической энергии (варианты) |
| JP4893483B2 (ja) * | 2006-09-11 | 2012-03-07 | ソニー株式会社 | 通信システム |
| JP4345850B2 (ja) | 2006-09-11 | 2009-10-14 | ソニー株式会社 | 通信システム及び通信装置 |
| US7960870B2 (en) | 2006-11-27 | 2011-06-14 | Xslent Energy Technologies, Llc | Power extractor for impedance matching |
| EP1965223B1 (en) * | 2007-03-02 | 2013-12-18 | Saab Ab | Subsurface Imaging radar |
| RU2340064C1 (ru) | 2007-03-29 | 2008-11-27 | Российская Академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ГНУ ВИЭСХ РОССЕЛЬХОЗАКАДЕМИИ) | Способ и устройство для передачи электрической энергии (варианты) |
| RU2342761C1 (ru) | 2007-09-07 | 2008-12-27 | Российская Академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ГНУ ВИЭСХ РОССЕЛЬХОЗАКАДЕМИИ) | Способ и устройство для передачи электрической энергии (варианты) |
| US8890472B2 (en) | 2007-09-26 | 2014-11-18 | Alex Mashinsky | Self-charging electric vehicles and aircraft, and wireless energy distribution system |
| WO2013093922A2 (en) | 2011-12-21 | 2013-06-27 | Powermat Technologies Ltd. | System and method for providing wireless power transfer functionality to an electrical device |
| US8350769B1 (en) | 2008-03-20 | 2013-01-08 | United States Of America As Represented By Secretary Of The Navy | Frequency agile electrically small tactical AM broadcast band antenna system |
| RU2366057C1 (ru) | 2008-04-25 | 2009-08-27 | Российская Академия сельскохозяйственных наук Государственное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ГНУ ВИЭСХ РОССЕЛЬХОЗАКАДЕМИИ) | Способ и устройство передачи электроэнергии |
| CN102099958B (zh) | 2008-05-14 | 2013-12-25 | 麻省理工学院 | 包括干涉增强的无线能量传输 |
| RU2366058C1 (ru) | 2008-05-16 | 2009-08-27 | Российская Академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ГНУ ВИЭСХ РОССЕЛЬХОЗАКАДЕМИИ) | Способ и устройство для передачи электроэнергии |
| US7719694B1 (en) * | 2008-06-23 | 2010-05-18 | Hrl Laboratories, Llc | System and method of surface wave imaging to detect ice on a surface or damage to a surface |
| US8009276B1 (en) * | 2008-06-23 | 2011-08-30 | Hrl Laboratories, Llc | System and method of surface wave imaging to map pressure on a surface |
| WO2010020813A1 (en) | 2008-08-20 | 2010-02-25 | Bae Systems Plc | High frequency surfacewave radar |
| WO2010024895A1 (en) | 2008-08-25 | 2010-03-04 | Governing Dynamics, Llc | Wireless energy transfer system |
| JP4911148B2 (ja) | 2008-09-02 | 2012-04-04 | ソニー株式会社 | 非接触給電装置 |
| US8933594B2 (en) | 2008-09-27 | 2015-01-13 | Witricity Corporation | Wireless energy transfer for vehicles |
| US8299936B2 (en) | 2008-12-18 | 2012-10-30 | Bae Systems Information And Electronic Systems Integration Inc. | Method and apparatus for establishing low frequency/ultra low frequency and very low frequency communications |
| US9130394B2 (en) | 2009-02-05 | 2015-09-08 | Qualcomm Incorporated | Wireless power for charging devices |
| JP4752931B2 (ja) | 2009-02-18 | 2011-08-17 | ブラザー工業株式会社 | 無線タグ通信装置 |
| US8338991B2 (en) | 2009-03-20 | 2012-12-25 | Qualcomm Incorporated | Adaptive impedance tuning in wireless power transmission |
| US8803474B2 (en) | 2009-03-25 | 2014-08-12 | Qualcomm Incorporated | Optimization of wireless power devices |
| US8237313B2 (en) | 2009-04-08 | 2012-08-07 | John Ruocco | Method and apparatus for wireless transmission and reception of electric power |
| TWI520439B (zh) | 2009-04-13 | 2016-02-01 | 凡爾賽特公司 | 半雙工相位陣列天線系統 |
| WO2010129369A2 (en) | 2009-04-28 | 2010-11-11 | Mojo Mobility, Inc. | System and methods for inductive charging, and improvements and uses thereof |
| WO2010127685A1 (en) | 2009-05-07 | 2010-11-11 | Telecom Italia S.P.A. | System for transferring energy wirelessly |
| US8274178B2 (en) | 2009-06-21 | 2012-09-25 | Christopher Allen Tucker | System of transmission of wireless energy |
| US8587490B2 (en) | 2009-07-27 | 2013-11-19 | New Jersey Institute Of Technology | Localized wave generation via model decomposition of a pulse by a wave launcher |
| US8063717B2 (en) | 2009-07-27 | 2011-11-22 | Avago Technologies Wireless Ip (Singapore) Pte. Ltd. | Duplexer having resonator filters |
| CN102013736B (zh) | 2009-09-03 | 2013-10-16 | Tdk株式会社 | 无线馈电装置和无线电力传输系统 |
| RU2409883C1 (ru) | 2009-09-11 | 2011-01-20 | Российская Академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ГНУ ВИЭСХ РОССЕЛЬХОЗАКАДЕМИИ) | Способ и устройство для передачи электрической энергии |
| US8541974B2 (en) | 2009-09-17 | 2013-09-24 | Qualcomm Incorporated | Movable magnetically resonant antenna for wireless charging |
| US20110080050A1 (en) | 2009-10-02 | 2011-04-07 | Ut-Battelle, Llc | Systems and Methods for Directional Reactive Power Ground Plane Transmission |
| US9461505B2 (en) | 2009-12-03 | 2016-10-04 | Mitsubishi Electric Research Laboratories, Inc. | Wireless energy transfer with negative index material |
| US20110133565A1 (en) | 2009-12-03 | 2011-06-09 | Koon Hoo Teo | Wireless Energy Transfer with Negative Index Material |
| RU2473160C2 (ru) | 2009-12-04 | 2013-01-20 | Российская академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства Российской академии сельскохозяйственных наук (ГНУ ВИЭСХ Россельхозакадемии) | Способ и устройство для передачи электрической энергии |
| US9030363B2 (en) | 2009-12-29 | 2015-05-12 | Kathrein-Werke Ag | Method and apparatus for tilting beams in a mobile communications network |
| US8384247B2 (en) | 2010-01-13 | 2013-02-26 | Mitsubishi Electric Research Laboratories, Inc. | Wireless energy transfer to moving devices |
| US8159385B2 (en) | 2010-02-04 | 2012-04-17 | Sensis Corporation | Conductive line communication apparatus and conductive line radar system and method |
| RU2423772C1 (ru) | 2010-03-23 | 2011-07-10 | Российская академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства Российской академии сельскохозяйственных наук (ГНУ ВИЭСХ Россельхозакадемии) | Способ и устройство передачи электрической энергии (варианты) |
| RU2459340C2 (ru) | 2010-09-21 | 2012-08-20 | Российская академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства Российской академии сельскохозяйственных наук (ГНУ ВИЭСХ Россельхозакадемии) | Способ и устройство для передачи электрической энергии |
| RU2474031C2 (ru) | 2010-09-22 | 2013-01-27 | Российская академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства Российской академии сельскохозяйственных наук (ГНУ ВИЭСХ Россельхозакадемии) | Способ и устройство для передачи электрической энергии (варианты) |
| US20120169568A1 (en) | 2011-01-03 | 2012-07-05 | Palm, Inc. | Multiband antenna with ground resonator and tuning element |
| JP2012147351A (ja) | 2011-01-14 | 2012-08-02 | Sony Corp | 信号伝送装置、電子機器、及び、信号伝送方法 |
| JP5058350B1 (ja) | 2011-03-30 | 2012-10-24 | 株式会社東芝 | 送電装置及び電力伝送システム |
| US9030421B2 (en) | 2011-04-01 | 2015-05-12 | Qualcomm Incorporated | Touchscreen controller with adjustable parameters |
| US20130029595A1 (en) | 2011-07-29 | 2013-01-31 | Qualcomm Incorporated | Communications related to electric vehicle wired and wireless charging |
| US20130049674A1 (en) | 2011-08-24 | 2013-02-28 | Qualcomm Incorporated | Integrated photo voltaic solar plant and electric vehicle charging station and method of operation |
| GB2494435B (en) | 2011-09-08 | 2018-10-03 | Roke Manor Res Limited | Apparatus for the transmission of electromagnetic waves |
| US8941448B2 (en) | 2011-10-13 | 2015-01-27 | Mediatek Singapore Pte. Ltd. | M-way coupler |
| US9264108B2 (en) | 2011-10-21 | 2016-02-16 | Qualcomm Incorporated | Wireless power carrier-synchronous communication |
| RU2488207C1 (ru) | 2011-11-17 | 2013-07-20 | Российская академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства Российской академии сельскохозяйственных наук (ГНУ ВИЭСХ Россельхозакадемии) | Способ и устройство для передачи электрической энергии |
| RU2488208C1 (ru) | 2011-12-22 | 2013-07-20 | Российская академия сельскохозяйственных наук Государственное научное учреждение Всероссийский научно-исследовательский институт электрификации сельского хозяйства Российской академии сельскохозяйственных наук (ГНУ ВИЭСХ Россельхозакадемии) | Способ и устройство для передачи электрической энергии |
| US10270292B2 (en) | 2012-01-06 | 2019-04-23 | Keith Maxwell Howard | System for wireless distribution of power |
| US9156364B2 (en) | 2012-02-14 | 2015-10-13 | Ut-Battelle, Llc | Wireless power charging using point of load controlled high frequency power converters |
| US20150280444A1 (en) | 2012-05-21 | 2015-10-01 | University Of Washington Through Its Center For Commercialization | Wireless power delivery in dynamic environments |
| US9419476B2 (en) | 2012-07-10 | 2016-08-16 | Farrokh Mohamadi | Flat panel, stationary or mobile, spatially beam-formed wireless energy delivery system |
| GB201215152D0 (en) | 2012-08-24 | 2012-10-10 | Imp Innovations Ltd | Maximising DC to load efficiency for inductive power transfer |
| KR20150103651A (ko) | 2012-08-28 | 2015-09-11 | 오클랜드 유니서비시즈 리미티드 | 개별적으로 위상을 제어하는 다상 유도 전력 전달 시스템 |
| US9252492B2 (en) | 2012-08-29 | 2016-02-02 | Intel Deutschland Gmbh | Antenna tuning via multi-feed transceiver architecture |
| US9270248B2 (en) | 2012-10-12 | 2016-02-23 | Infineon Technologies Ag | Impedance matching network with improved quality factor and method for matching an impedance |
| RU2544380C2 (ru) | 2013-01-24 | 2015-03-20 | Дмитрий Семенович Стребков | Способ и устройство для передачи электрической энергии |
| RU2533060C2 (ru) | 2013-02-01 | 2014-11-20 | Дмитрий Семенович Стребков | Способ и устройство для передачи электрической энергии |
| US9910144B2 (en) | 2013-03-07 | 2018-03-06 | Cpg Technologies, Llc | Excitation and use of guided surface wave modes on lossy media |
| US9912031B2 (en) | 2013-03-07 | 2018-03-06 | Cpg Technologies, Llc | Excitation and use of guided surface wave modes on lossy media |
| RU2548571C2 (ru) | 2013-04-04 | 2015-04-20 | Федеральное государственное бюджетное научное учреждение "Всероссийский научно-исследовательский институт электрификации сельского хозяйства (ФГБНУ ВИЭСХ) | Система для беспроводного электропитания удаленных потребителей электрической энергии по лазерному лучу |
| GB201306555D0 (en) * | 2013-04-10 | 2013-05-22 | Roke Manor Research | System and Method for Sensing Signal Disruption |
| JP6164914B2 (ja) | 2013-04-30 | 2017-07-19 | キヤノン株式会社 | 給電装置、制御方法及びプログラム |
| RU2554723C2 (ru) | 2013-06-13 | 2015-06-27 | Федеральное государственное бюджетное научное учреждение "Всероссийский научно-исследовательский институт электрификации сельского хозяйства" (ФГБНУ ВИЭСХ) | Способ и устройство электроснабжения воздушного летательного аппарата (варианты) |
| US9647345B2 (en) | 2013-10-21 | 2017-05-09 | Elwha Llc | Antenna system facilitating reduction of interfering signals |
| US8897697B1 (en) | 2013-11-06 | 2014-11-25 | At&T Intellectual Property I, Lp | Millimeter-wave surface-wave communications |
| JP5839020B2 (ja) | 2013-11-28 | 2016-01-06 | Tdk株式会社 | 送電コイルユニット及びワイヤレス電力伝送装置 |
| GB201401014D0 (en) | 2014-01-21 | 2014-03-05 | Welding Inst | System and method for transmitting data or power across a structural component |
| US9722318B2 (en) | 2015-07-14 | 2017-08-01 | At&T Intellectual Property I, L.P. | Method and apparatus for coupling an antenna to a device |
-
2015
- 2015-09-09 US US14/848,705 patent/US10101444B2/en active Active
- 2015-09-10 SG SG11201701373SA patent/SG11201701373SA/en unknown
- 2015-09-10 AU AU2015314920A patent/AU2015314920B2/en not_active Expired - Fee Related
- 2015-09-10 EP EP15772085.5A patent/EP3191866A1/en not_active Withdrawn
- 2015-09-10 MA MA040398A patent/MA40398A/fr unknown
- 2015-09-10 KR KR1020177006659A patent/KR20170056540A/ko unknown
- 2015-09-10 WO PCT/US2015/049505 patent/WO2016040689A1/en active Application Filing
- 2015-09-10 JP JP2017514525A patent/JP2017534847A/ja not_active Ceased
- 2015-09-10 CN CN201580054907.9A patent/CN106796287A/zh active Pending
- 2015-09-10 EA EA201790581A patent/EA201790581A1/ru unknown
- 2015-09-10 BR BR112017004918A patent/BR112017004918A2/pt not_active Application Discontinuation
- 2015-09-10 MX MX2017003028A patent/MX362460B/es active IP Right Grant
-
2017
- 2017-02-26 IL IL250774A patent/IL250774A0/en unknown
-
2018
- 2018-10-08 US US16/154,068 patent/US20190049568A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| IL250774A0 (en) | 2017-04-30 |
| CN106796287A (zh) | 2017-05-31 |
| MA40398A (fr) | 2016-03-17 |
| WO2016040689A1 (en) | 2016-03-17 |
| SG11201701373SA (en) | 2017-03-30 |
| US10101444B2 (en) | 2018-10-16 |
| EA201790581A1 (ru) | 2017-08-31 |
| MX2017003028A (es) | 2017-05-30 |
| US20160077203A1 (en) | 2016-03-17 |
| JP2017534847A (ja) | 2017-11-24 |
| MX362460B (es) | 2019-01-18 |
| EP3191866A1 (en) | 2017-07-19 |
| AU2015314920B2 (en) | 2019-11-21 |
| US20190049568A1 (en) | 2019-02-14 |
| BR112017004918A2 (pt) | 2017-12-12 |
| AU2015314920A1 (en) | 2017-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170049527A (ko) | 유도 표면파 전송을 위한 가변 주파수 수신기 | |
| KR20170049525A (ko) | 손실 매체에서 다중 주파수의 유도 표면파 | |
| KR20170054401A (ko) | 유도 표면파의 동시 전송 및 수신 | |
| KR20180049052A (ko) | 하이브리드 위상 어레이 전송 | |
| KR20170056540A (ko) | 손실성 매체 상의 유도 표면파 모드를 사용한 원격 표면 감지 | |
| KR20170056541A (ko) | 손실성 매체 상의 유도 표면파 모드를 사용한 표면 하부 감지 | |
| KR20170049530A (ko) | 동시성 다중 주파수 수신 회로들 | |
| KR20170054400A (ko) | 변조된 유도 표면파 | |
| KR20170049528A (ko) | 유도 표면파를 이용한 지오로케이션 | |
| JP2018530231A (ja) | 強化された誘導表面導波プローブ | |
| KR20180050387A (ko) | 유도 표면 도파로 프로브들 | |
| KR102388633B1 (ko) | 유도 표면파의 여기 및 사용 | |
| KR20180050725A (ko) | 최적의 성능을 위한 필드 강도 모니터링 | |
| KR20180052669A (ko) | 유도 표면파들을 사용한 지오로케이션 | |
| KR20180052704A (ko) | 유도 표면파를 사용한 지오로케이션 | |
| KR20180052684A (ko) | 유도 표면파들에 의한 지오로케이션 | |
| KR20180052666A (ko) | 유도 표면파 전력 전달 시스템에서의 부하 쉐딩 | |
| KR20180050399A (ko) | 유도 표면파들을 사용한 지오로케이션 | |
| JP6599445B2 (ja) | 電力信号上のデータ埋め込み | |
| KR20180051598A (ko) | 정의된 영역들을 조사하는 유도 표면파 전송들 | |
| KR20180050401A (ko) | 유도 표면파들을 사용한 지오로케이션 | |
| KR20180051573A (ko) | 유도 표면파를 사용한 글로벌 시간 동기화 | |
| KR20180051584A (ko) | 귀로 결합된 무선 전력 전송 | |
| KR20180049051A (ko) | 높은 자기 투자율을 갖는 코어들을 갖는 자기 코일들 | |
| KR20180052685A (ko) | 무선 전력 시스템에서의 도용 방지 |