KR20160041999A - 원심분리기 및 반응조 유닛의 원심분리방법 - Google Patents
원심분리기 및 반응조 유닛의 원심분리방법 Download PDFInfo
- Publication number
- KR20160041999A KR20160041999A KR1020167005920A KR20167005920A KR20160041999A KR 20160041999 A KR20160041999 A KR 20160041999A KR 1020167005920 A KR1020167005920 A KR 1020167005920A KR 20167005920 A KR20167005920 A KR 20167005920A KR 20160041999 A KR20160041999 A KR 20160041999A
- Authority
- KR
- South Korea
- Prior art keywords
- rotor
- centrifuge
- reactor
- magnetic
- reactor unit
- Prior art date
Links
- 238000006243 chemical reaction Methods 0.000 title claims description 149
- 238000000034 method Methods 0.000 title claims description 44
- 238000004140 cleaning Methods 0.000 claims abstract description 62
- 239000012530 fluid Substances 0.000 claims abstract description 33
- 230000005291 magnetic effect Effects 0.000 claims description 99
- 239000007788 liquid Substances 0.000 claims description 84
- 239000011324 bead Substances 0.000 claims description 57
- 238000011068 loading method Methods 0.000 claims description 39
- 230000007246 mechanism Effects 0.000 claims description 33
- 239000000523 sample Substances 0.000 claims description 32
- 210000004369 blood Anatomy 0.000 claims description 24
- 239000008280 blood Substances 0.000 claims description 24
- 230000001681 protective effect Effects 0.000 claims description 22
- 239000003153 chemical reaction reagent Substances 0.000 claims description 15
- 230000008878 coupling Effects 0.000 claims description 14
- 238000010168 coupling process Methods 0.000 claims description 14
- 238000005859 coupling reaction Methods 0.000 claims description 14
- 238000004458 analytical method Methods 0.000 claims description 11
- 238000001816 cooling Methods 0.000 claims description 11
- 229910052751 metal Inorganic materials 0.000 claims description 7
- 239000002184 metal Substances 0.000 claims description 7
- 239000000427 antigen Substances 0.000 claims description 6
- 102000036639 antigens Human genes 0.000 claims description 6
- 108091007433 antigens Proteins 0.000 claims description 6
- 239000011248 coating agent Substances 0.000 claims description 6
- 238000000576 coating method Methods 0.000 claims description 6
- 238000007599 discharging Methods 0.000 claims description 6
- 238000011049 filling Methods 0.000 claims description 6
- 239000000872 buffer Substances 0.000 claims description 5
- 238000012360 testing method Methods 0.000 claims description 5
- 238000000926 separation method Methods 0.000 claims description 4
- 239000011435 rock Substances 0.000 claims 1
- 230000008569 process Effects 0.000 description 20
- 238000005119 centrifugation Methods 0.000 description 19
- 230000033001 locomotion Effects 0.000 description 11
- 239000000243 solution Substances 0.000 description 11
- 238000005406 washing Methods 0.000 description 10
- 238000003018 immunoassay Methods 0.000 description 9
- 230000003287 optical effect Effects 0.000 description 9
- 210000004027 cell Anatomy 0.000 description 8
- 238000011109 contamination Methods 0.000 description 7
- 238000009826 distribution Methods 0.000 description 7
- 230000000694 effects Effects 0.000 description 7
- 239000000463 material Substances 0.000 description 7
- 230000009870 specific binding Effects 0.000 description 7
- 238000001514 detection method Methods 0.000 description 6
- 230000001133 acceleration Effects 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 102000004190 Enzymes Human genes 0.000 description 4
- 108090000790 Enzymes Proteins 0.000 description 4
- 230000001419 dependent effect Effects 0.000 description 4
- 238000002474 experimental method Methods 0.000 description 4
- 239000011888 foil Substances 0.000 description 4
- 238000011534 incubation Methods 0.000 description 4
- 102000039446 nucleic acids Human genes 0.000 description 4
- 108020004707 nucleic acids Proteins 0.000 description 4
- 150000007523 nucleic acids Chemical class 0.000 description 4
- 230000002829 reductive effect Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 239000000356 contaminant Substances 0.000 description 3
- 230000001276 controlling effect Effects 0.000 description 3
- 238000010790 dilution Methods 0.000 description 3
- 239000012895 dilution Substances 0.000 description 3
- 210000003743 erythrocyte Anatomy 0.000 description 3
- 238000010438 heat treatment Methods 0.000 description 3
- 239000002480 mineral oil Substances 0.000 description 3
- 235000010446 mineral oil Nutrition 0.000 description 3
- 239000003921 oil Substances 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 238000009423 ventilation Methods 0.000 description 3
- 229910052782 aluminium Inorganic materials 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 239000007864 aqueous solution Substances 0.000 description 2
- 238000009833 condensation Methods 0.000 description 2
- 230000005494 condensation Effects 0.000 description 2
- 238000012864 cross contamination Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 239000006249 magnetic particle Substances 0.000 description 2
- 230000005499 meniscus Effects 0.000 description 2
- 239000011859 microparticle Substances 0.000 description 2
- 229920003023 plastic Polymers 0.000 description 2
- 102000004169 proteins and genes Human genes 0.000 description 2
- 108090000623 proteins and genes Proteins 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 238000005496 tempering Methods 0.000 description 2
- 239000012780 transparent material Substances 0.000 description 2
- 230000032258 transport Effects 0.000 description 2
- 238000002965 ELISA Methods 0.000 description 1
- 241000212749 Zesius chrysomallus Species 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000004520 agglutination Effects 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 230000027455 binding Effects 0.000 description 1
- 239000012620 biological material Substances 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000009534 blood test Methods 0.000 description 1
- 238000009582 blood typing Methods 0.000 description 1
- 239000000969 carrier Substances 0.000 description 1
- 238000000423 cell based assay Methods 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 238000001035 drying Methods 0.000 description 1
- 230000003028 elevating effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000001704 evaporation Methods 0.000 description 1
- 230000008020 evaporation Effects 0.000 description 1
- 239000003302 ferromagnetic material Substances 0.000 description 1
- 230000001900 immune effect Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 238000012216 screening Methods 0.000 description 1
- 238000010206 sensitivity analysis Methods 0.000 description 1
- 210000002966 serum Anatomy 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000005507 spraying Methods 0.000 description 1
- 239000007858 starting material Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000007306 turnover Effects 0.000 description 1
- 238000013022 venting Methods 0.000 description 1
- 230000003612 virological effect Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images

















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/48—Biological material, e.g. blood, urine; Haemocytometers
- G01N33/50—Chemical analysis of biological material, e.g. blood, urine; Testing involving biospecific ligand binding methods; Immunological testing
- G01N33/53—Immunoassay; Biospecific binding assay; Materials therefor
- G01N33/543—Immunoassay; Biospecific binding assay; Materials therefor with an insoluble carrier for immobilising immunochemicals
- G01N33/54313—Immunoassay; Biospecific binding assay; Materials therefor with an insoluble carrier for immobilising immunochemicals the carrier being characterised by its particulate form
- G01N33/54326—Magnetic particles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B04—CENTRIFUGAL APPARATUS OR MACHINES FOR CARRYING-OUT PHYSICAL OR CHEMICAL PROCESSES
- B04B—CENTRIFUGES
- B04B5/00—Other centrifuges
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L13/00—Cleaning or rinsing apparatus
- B01L13/02—Cleaning or rinsing apparatus for receptacle or instruments
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L9/00—Supporting devices; Holding devices
- B01L9/52—Supports specially adapted for flat sample carriers, e.g. for plates, slides, chips
- B01L9/523—Supports specially adapted for flat sample carriers, e.g. for plates, slides, chips for multisample carriers, e.g. used for microtitration plates
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B03—SEPARATION OF SOLID MATERIALS USING LIQUIDS OR USING PNEUMATIC TABLES OR JIGS; MAGNETIC OR ELECTROSTATIC SEPARATION OF SOLID MATERIALS FROM SOLID MATERIALS OR FLUIDS; SEPARATION BY HIGH-VOLTAGE ELECTRIC FIELDS
- B03C—MAGNETIC OR ELECTROSTATIC SEPARATION OF SOLID MATERIALS FROM SOLID MATERIALS OR FLUIDS; SEPARATION BY HIGH-VOLTAGE ELECTRIC FIELDS
- B03C1/00—Magnetic separation
- B03C1/002—High gradient magnetic separation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B03—SEPARATION OF SOLID MATERIALS USING LIQUIDS OR USING PNEUMATIC TABLES OR JIGS; MAGNETIC OR ELECTROSTATIC SEPARATION OF SOLID MATERIALS FROM SOLID MATERIALS OR FLUIDS; SEPARATION BY HIGH-VOLTAGE ELECTRIC FIELDS
- B03C—MAGNETIC OR ELECTROSTATIC SEPARATION OF SOLID MATERIALS FROM SOLID MATERIALS OR FLUIDS; SEPARATION BY HIGH-VOLTAGE ELECTRIC FIELDS
- B03C1/00—Magnetic separation
- B03C1/005—Pretreatment specially adapted for magnetic separation
- B03C1/01—Pretreatment specially adapted for magnetic separation by addition of magnetic adjuvants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B03—SEPARATION OF SOLID MATERIALS USING LIQUIDS OR USING PNEUMATIC TABLES OR JIGS; MAGNETIC OR ELECTROSTATIC SEPARATION OF SOLID MATERIALS FROM SOLID MATERIALS OR FLUIDS; SEPARATION BY HIGH-VOLTAGE ELECTRIC FIELDS
- B03C—MAGNETIC OR ELECTROSTATIC SEPARATION OF SOLID MATERIALS FROM SOLID MATERIALS OR FLUIDS; SEPARATION BY HIGH-VOLTAGE ELECTRIC FIELDS
- B03C1/00—Magnetic separation
- B03C1/02—Magnetic separation acting directly on the substance being separated
- B03C1/28—Magnetic plugs and dipsticks
- B03C1/288—Magnetic plugs and dipsticks disposed at the outer circumference of a recipient
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B03—SEPARATION OF SOLID MATERIALS USING LIQUIDS OR USING PNEUMATIC TABLES OR JIGS; MAGNETIC OR ELECTROSTATIC SEPARATION OF SOLID MATERIALS FROM SOLID MATERIALS OR FLUIDS; SEPARATION BY HIGH-VOLTAGE ELECTRIC FIELDS
- B03C—MAGNETIC OR ELECTROSTATIC SEPARATION OF SOLID MATERIALS FROM SOLID MATERIALS OR FLUIDS; SEPARATION BY HIGH-VOLTAGE ELECTRIC FIELDS
- B03C1/00—Magnetic separation
- B03C1/02—Magnetic separation acting directly on the substance being separated
- B03C1/30—Combinations with other devices, not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B04—CENTRIFUGAL APPARATUS OR MACHINES FOR CARRYING-OUT PHYSICAL OR CHEMICAL PROCESSES
- B04B—CENTRIFUGES
- B04B15/00—Other accessories for centrifuges
- B04B15/02—Other accessories for centrifuges for cooling, heating, or heat insulating
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B04—CENTRIFUGAL APPARATUS OR MACHINES FOR CARRYING-OUT PHYSICAL OR CHEMICAL PROCESSES
- B04B—CENTRIFUGES
- B04B5/00—Other centrifuges
- B04B5/04—Radial chamber apparatus for separating predominantly liquid mixtures, e.g. butyrometers
- B04B5/0407—Radial chamber apparatus for separating predominantly liquid mixtures, e.g. butyrometers for liquids contained in receptacles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B04—CENTRIFUGAL APPARATUS OR MACHINES FOR CARRYING-OUT PHYSICAL OR CHEMICAL PROCESSES
- B04B—CENTRIFUGES
- B04B5/00—Other centrifuges
- B04B5/04—Radial chamber apparatus for separating predominantly liquid mixtures, e.g. butyrometers
- B04B5/0407—Radial chamber apparatus for separating predominantly liquid mixtures, e.g. butyrometers for liquids contained in receptacles
- B04B5/0414—Radial chamber apparatus for separating predominantly liquid mixtures, e.g. butyrometers for liquids contained in receptacles comprising test tubes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B04—CENTRIFUGAL APPARATUS OR MACHINES FOR CARRYING-OUT PHYSICAL OR CHEMICAL PROCESSES
- B04B—CENTRIFUGES
- B04B7/00—Elements of centrifuges
- B04B7/02—Casings; Lids
- B04B7/04—Casings facilitating discharge
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B3/00—Cleaning by methods involving the use or presence of liquid or steam
- B08B3/02—Cleaning by the force of jets or sprays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B3/00—Cleaning by methods involving the use or presence of liquid or steam
- B08B3/04—Cleaning involving contact with liquid
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B3/00—Cleaning by methods involving the use or presence of liquid or steam
- B08B3/04—Cleaning involving contact with liquid
- B08B3/06—Cleaning involving contact with liquid using perforated drums in which the article or material is placed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B3/00—Cleaning by methods involving the use or presence of liquid or steam
- B08B3/04—Cleaning involving contact with liquid
- B08B3/10—Cleaning involving contact with liquid with additional treatment of the liquid or of the object being cleaned, e.g. by heat, by electricity or by vibration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B9/00—Cleaning hollow articles by methods or apparatus specially adapted thereto
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/48—Biological material, e.g. blood, urine; Haemocytometers
- G01N33/50—Chemical analysis of biological material, e.g. blood, urine; Testing involving biospecific ligand binding methods; Immunological testing
- G01N33/53—Immunoassay; Biospecific binding assay; Materials therefor
- G01N33/543—Immunoassay; Biospecific binding assay; Materials therefor with an insoluble carrier for immobilising immunochemicals
- G01N33/54366—Apparatus specially adapted for solid-phase testing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/028—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations having reaction cells in the form of microtitration plates
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2300/00—Additional constructional details
- B01L2300/08—Geometry, shape and general structure
- B01L2300/0809—Geometry, shape and general structure rectangular shaped
- B01L2300/0829—Multi-well plates; Microtitration plates
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L2400/00—Moving or stopping fluids
- B01L2400/04—Moving fluids with specific forces or mechanical means
- B01L2400/0403—Moving fluids with specific forces or mechanical means specific forces
- B01L2400/0409—Moving fluids with specific forces or mechanical means specific forces centrifugal forces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L3/00—Containers or dishes for laboratory use, e.g. laboratory glassware; Droppers
- B01L3/50—Containers for the purpose of retaining a material to be analysed, e.g. test tubes
- B01L3/508—Containers for the purpose of retaining a material to be analysed, e.g. test tubes rigid containers not provided for above
- B01L3/5085—Containers for the purpose of retaining a material to be analysed, e.g. test tubes rigid containers not provided for above for multiple samples, e.g. microtitration plates
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B03—SEPARATION OF SOLID MATERIALS USING LIQUIDS OR USING PNEUMATIC TABLES OR JIGS; MAGNETIC OR ELECTROSTATIC SEPARATION OF SOLID MATERIALS FROM SOLID MATERIALS OR FLUIDS; SEPARATION BY HIGH-VOLTAGE ELECTRIC FIELDS
- B03C—MAGNETIC OR ELECTROSTATIC SEPARATION OF SOLID MATERIALS FROM SOLID MATERIALS OR FLUIDS; SEPARATION BY HIGH-VOLTAGE ELECTRIC FIELDS
- B03C2201/00—Details of magnetic or electrostatic separation
- B03C2201/18—Magnetic separation whereby the particles are suspended in a liquid
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B03—SEPARATION OF SOLID MATERIALS USING LIQUIDS OR USING PNEUMATIC TABLES OR JIGS; MAGNETIC OR ELECTROSTATIC SEPARATION OF SOLID MATERIALS FROM SOLID MATERIALS OR FLUIDS; SEPARATION BY HIGH-VOLTAGE ELECTRIC FIELDS
- B03C—MAGNETIC OR ELECTROSTATIC SEPARATION OF SOLID MATERIALS FROM SOLID MATERIALS OR FLUIDS; SEPARATION BY HIGH-VOLTAGE ELECTRIC FIELDS
- B03C2201/00—Details of magnetic or electrostatic separation
- B03C2201/26—Details of magnetic or electrostatic separation for use in medical applications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B04—CENTRIFUGAL APPARATUS OR MACHINES FOR CARRYING-OUT PHYSICAL OR CHEMICAL PROCESSES
- B04B—CENTRIFUGES
- B04B11/00—Feeding, charging, or discharging bowls
- B04B11/04—Periodical feeding or discharging; Control arrangements therefor
- B04B2011/046—Loading, unloading, manipulating sample containers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0401—Sample carriers, cuvettes or reaction vessels
- G01N2035/0437—Cleaning cuvettes or reaction vessels
Abstract
반응조 유닛 세정을 위한 원심분리기로, 외측으로 향한 개구(들)로 적어도 하나의 반응조 유닛을 홀딩하는 로터, 회전축을 중심으로 로터를 회전시키는 모터 및 실질적으로 원통형 내표면을 가지며, 반응조 유닛으로부터 배출된 유체를 방출시키기 위해 드레인을 구비한 하우징을 포함하고, 로터의 회전으로 내표면에서 배출 유체를 드레인으로 이동시키는 바람이 생성되도록 내표면과 로터 사이에 갭이 구비되고, 유체를 배출시키기 위한 드레인에 흡입 펌프가 연결된다.
Description
본 발명은 원심분리기 및 반응조 유닛의 원심분리방법에 관한 것이다.
US 2009/0181359 A1은 고감도, 고처리율을 가지는 자동 면역분석 프로세스를 개시한다. 면역분석 프로세스에서 일반적이듯이 제1 특이결합멤버(specific binding member)는 복합체(complex)를 형성하기 위해 제2 특이결합멤버와 반응할 수 있고, 이때 복합체의 양이나 농도가 결정된다. 이 프로세스는 특이결합멤버 중 하나가 결박되는 자성 입자(magnatic particle)를 이용한다. 자동 프로세스에서 중요한 단계는 복합체의 세정 과정으로, 이는 상기 자성 입자와 관련한다. 세정 과정은 처리량 민감도, 특이성(specificity), 그리고 전체 프로세스에 대한 비용에 큰 영향을 미친다. 적은 세정 단계를 필요로 할수록 프로세스가 더 빨라진다. 복합체가 비특이결합성분(non-specifically bound component)으로부터 더욱 잘 분리될수록, 프로세스의 민감도가 좋아진다.
US 8,329,475 B2는 분석될 샘플에서 원치 않는 성분을 제거하기 위한 세정 프로세스를 개시한다. 여기서는 컨테이너 내에서 세정액(wash fluid)의 표면(level)을 진동시키는 것이 교시되어 있다. 컨테이너는 컵, 액체용기(well), 큐벳(cuvette), 테스트 튜브 등으로 구성될 수 있다. 진동 프로세스에 의해 소량의 세정액이 컨테이너로부터 배출되고 제거된다. 그 양은 컨테이너에 수용된 총량에 비해 소량이다. 세정액의 진동 운동은 유동 메니스커스(meniscus)를 만들어낸다. 유동 메니스커스는 컨테이너의 벽표면에서 세정액을 지속적으로 리프레싱(refreshing)하여, 컨테이너 벽의 경계층에서 농도 기울기(concentration gradient)를 감소시킨다.
SQUIRTTM라는 상표명으로, 멀티 포맷(multi-format)의 마이크로 플레이트 세정기가 미국의 매트리컬 바이오사이언스로부터 시판되었다. 이 세정기는 세정액(washing solution)과 공기를 마이크로 플레이트의 반응조 안으로 뿌리는 노즐들을 포함한다. 다양한 세정핸들(washing handle)이 구비된다. 자동 플립핑(flipping) 요소는 마이크로 플레이트를 젖혀 톱다운(top-down) 세정을 수행한다. 이 마이크로 플레이트 세정기는 서로 다른 SBS/ANSI 마이크로웰 플레이트 포맷(92, 384, 1536 등) 사이에서 호환된다.
세정액 및/또는 공기를 반응조 밖으로 배출하거나 반응조 안으로 흡입하여 세정하는 세정 장치는 반응조의 상부 영역에 존재하는 오염 물질을 항상 성공적으로 제거할 수 없는데, 이는 반응조 상부 경계부에 정확히 인접하도록 세정액의 분출을 조준하는 게 어렵기 때문이다. 더욱이, 노즐의 외표면이 오염될 위험이 있고, 특히 노즐이 반응조 아래에 위치하는 탑다운 세정 단계가 수행될 때 그러하다. 인체에 대한 일반적인 진단의 경우, 시재료(starting material)는 혈장(plasma)이나 혈청(serum)일 것이다. 그런 물질 내에 존재하는 단백질은 복합체를 형성하기 쉽다. 단백질의 막힘과 그 이후의 흡입 실패는 종래 세정 시스템의 주요한 결점이다. 이는 자동화 시스템의 고장이나 실패나 유지를 위한 기회를 제공하기 위한 전체 작업흐름을 방해한다.
US 2009/0117620 A1은 임상화학 분석, 면역분석, 핵산분석의 확대 및 이들의 어떠한 조합을 수행할 수 있는 실험실 자동화 시스템에 관한 것이다. 본 시스템에서는, 마이크로웰 플레이트와 딥 멀티웰 플레이트가 반응조로 사용된다. 그런 멀티웰 플레이트의 사용은 고처리량을 가지는 면역분석을 수행할 수 있게 한다.
그 밖의 실험실 자동화 시스템은 멀티웰 플레이트 대신 소위 겔-카드(gel-card)를 사용하고 있다. 멀티웰 플레이트 대비 겔-카드의 장점은 겔-카드의 측면(side surface)을 스캐닝함으로써 자동적으로 광학적으로 분석될 수 있다는 점이다. 이는 겔 컬럼(column) 내에서 그들을 분리시킴으로써, 생물학적 물질을 분석하도록 구현시킬 수 있다.
EP 937 502 A2는 마이크로 플레이트를 조작하는 방법을 개시하며, 여기서 액체는 반응조로 투여되고 액체가 제거된다. 액체를 반응조로 투여한 후 마이크로 플레이트가 원심분리되어 원심력이 반응조의 바닥을 향해 가해진 뒤, 샘플 플레이트가 원심분리되어 원심력이 반응조의 바닥으로부터 밖으로 가해져 반응조를 비우게 된다.
JP 2009-264927 A는 수평 회전축을 중심으로 회전하는 회전 드럼을 포함하고, 회전 드럼의 측면상에 홀딩 구역을 가지며, 각각이 마이크로 플레이트를 홀딩할 수 있는 마이크로 플레이트 치료 장치를 개시한다. 드럼은 커버에 의해 둘러싸인다. 반응조의 개구가 외측을 향하거나 드럼의 내측을 향하도록 마이크로 플레이트가 드럼 내에 놓일 수 있다.
CN 102 175 855 A로부터 효소라벨 플레이트(enzyme-labeled plate)가 알려져 있고, 이는 회전 메커니즘, 세정 메커니즘 및 배수 메커니즘을 포함한다. 세정이 완료된 후, 지속적인 회전에 의해 발생한 원심력은 효소라벨 플레이트의 구멍에 잔존하는 물을 제거할 수 있어 건조 효과가 실현되고, 따라서 효소라벨 플레이트는 세정된 이후 즉시 이용될 수 있다.
US 4,953,575는 큐벳 세트를 세정하기 위한 세정 장치를 개시한다. 큐벳 세트는 로터(rotor) 내의 홀더 안에 놓인다. 큐벳은 세정 액체가 채워져 있다. 세정 액체는 로터를 회전시킴으로써 큐벳으로부터 제거된다.
이탈리아 특허출원 IT TO20 110 009 A는 로터를 가진 원심분리기에 관한 것이다. 로터는 탄성 케이블 및 상기 탄성 케이블에 의해 활성화되는 소형 피스톤을 포함한다. 반응조는 로터가 회전하는 동안 탄성 케이블 및 소형 피스톤에 의해 대응 수용부나 셀로부터 밀려나올 수 있고, 이때, 반응조는 회전축 방향으로 밀려나온다.
US 5,419,871은 단일 평면에서 슬라이드 요소를 이동시키기 위한 엘리베이터(elevator)와 분석기(analyzer)에 관한 것으로, 이는 서로 다른 수직 레벨에 배치된 복수의 배양기(incubator) 중 하나로 이동시킨다. 엘리베이터를 올리거나 내리기 위한 구동 메커니즘이 구비되고, 푸셔 블레이드(pusher blade)와 같은 푸셔가 엘리베이터 내에 구비되어, 엘리베이터에서 슬라이드 요소를 분배기(distributor)로부터 서포트(support)로 밀어내고, 그 후 배양기 중 하나로 밀어낸다.
US 6,150,182는 수직축을 중심으로 반응조를 회전시키기 위한 원심분리기를 개시한다. 자성 소자가 반응조 부근에 배치될 수 있고, 이에 따라 반응조 내에 자성 비드를 보유하기 위하여 자기장이 반응조에 전달된다.
WO 93/10455 A1는 중심 튜브, 외측 폐기 챔버 및 중심 튜브 안으로 뿌려진 복수의 마이크로입자 비드를 포함하는, 자동 면역분석을 수행하는 원심분리기 용기에 관한 것이다. 마이크로입자 비드는 자기화될 수 있는 코어를 가지며, 이는 세정 동작이 이루어지는 동안 외부 자성원(magnetic source)으로 활성화된다.
DE 10 2008 042 971 A1으로부터 반응조를 원심분리하는 원심분리기가 알려져 있고, 이에 의해 더욱 무거운 성분들이 반응조의 하부 섹션에 수집된다. 반응조의 하부 섹션은 반응조의 하부 섹션에서 원심분리 후 잠시 자성 비드를 홀딩하는 자성 요소에 의해 둘러싸인다.
CN 102 417 902 A는 자성 비드 마이크로티터 플레이트 방식으로 핵산을 추출하는 키트에 관한 것이다.
US 2006/0198759 A1은 로터를 앞뒤로 진동시키는 혼합 모드에서 사용될 수 있는 원심분리기를 개시한다.
EP 1 952 890 A2는 복수의 원심분리 디스크를 부가한 원심분리기를 개시한다. 각 디스크는 겔-카드를 부착시키거나 수평축을 중심으로 겔-카드를 회전시키도록 구현된다.
본 발명의 목적은 반응조 유닛 세정을 위한 원심분리기를 제공함에 있다.
이 목적은 청구항 제1항에 정의된 반응조를 가진 원심분리기에 의해 달성된다. 바람직한 실시예들이 그에 대응하는 종속항들에 정의되어 있다.
반응조 유닛 세정을 위한 원심분리기로, 외측으로 향한 개구(들)로 적어도 하나의 반응조 유닛을 홀딩하는 로터(rotor), 회전축을 중심으로 상기 로터를 회전시키는 모터(motor) 및 바람직하게는 실질적으로 원통형 내표면을 가지며, 상기 반응조 유닛으로부터 배출된 유체(fluid)를 방출시키기 위해 드레인(drain)을 구비한 하우징(housing)을 포함하고, 상기 로터를 회전시킴으로써 상기 내표면 상에서 상기 배출된 유체를 상기 드레인으로 이동시키는 바람이 발생하도록 상기 내표면과 상기 로터 사이에 갭(gap)이 구비되고, 유체를 배출시키기 위한 상기 드레인에 흡입 펌프(aspiration pump)가 연결된다.
원심분리기의 드레인에 연결된 흡입 펌프는 하우징의 더 빠르고 개선된 세정을 가능케 한다. 이는 원심분리기의 하우징의 바닥과 벽부상에 존재하는 샘플 액체에 기초한 상호오염(cross-contamination)을 방지하는 데 중요하다. 연결된 흡입 펌프에 의하여 반응조(들)로부터 배출된 액체가 펌프의 스위치가 켜지는 즉시 흡입된다. 펌프는 원심분리 중에 가동되거나, 필요하다면 스위치가 켜지는 어떤 시점에 가동될 수도 있다. 흡입 펌프의 스위치를 끈 후 하우징에 잔존하는 잔존 액체는 수동적으로 제거될 수 있다. 하지만, 대부분이 이미 흡입 펌프에 의해 제거되어 상호오염의 위험이 훨씬 줄어들게 된다.
반응조 유닛 세정을 위한 원심분리기로, 외측으로 향한 개구(들)로 적어도 하나의 반응조 유닛을 홀딩하는 로터, 회전축을 중심으로 상기 로터를 회전시키는 모터 및 로터를 감싸는 실질적으로 원통형인 내표면을 가지며, 상기 반응조 유닛으로부터 배출된 유체를 방출시키기 위해 드레인을 구비한 하우징을 포함하고, 상기 로터를 회전시킴으로써 상기 원통형 내표면 상에서 상기 배출된 유체를 상기 드레인으로 이동시키는 바람이나 순환 기류(circular airstream)가 발생하도록 상기 원통형 내표면과 상기 로터 사이에 1mm보다 크지 않은 갭이 구비된다.
로터와 원통형 내표면 사이의 작은 갭 때문에, 강한 순환 기류가 회전 로터에 의해 발생하며, 이는 배출된 유체를 드레인으로 이동시킨다. 따라서, 로터를 회전시키기 전에 하우징의 내부로부터 반응조 유닛의 반응조 내에 수용된 모든 액체를 완전히 빼내는 것이 가능해진다. 이 유체는 오염 물질로 간주된다. 이 오염 물질이 완전히 제거될 수 있음으로 인해, 오염의 위험이 없어진다. 갭은 바람직하게는 0.75mm보다 크지 않으며, 특히 0.5mm보다 크지 않다. 갭이 작을수록 순환 기류가 세진다. 하지만, 그런 작은 갭은 로터로 하여금 원통형 내표면과의 접촉을 일으킬 수 있으므로, 바람직하게는 갭이 0.1mm보다 작지 않아야 하며, 특히 0.2mm 또는 0.3mm보다 작지 않아야 한다.
본 발명의 또 다른 목적은 휘발성 액체(volatile liquid)를 수용하는 반응조 유닛을 확실히 세정할 수 있는, 반응조 유닛 세정을 위한 원심분리기를 제공함에 있다.
이 목적은 청구항 제3항에 따른 반응조 세정을 위한 원심분리기에 의해 달성된다. 바람직한 실시예들이 그에 대응하는 종속항들에 정의되어 있다.
반응조 유닛 세정을 위한 원심분리기로, 반지름 방향의 외측으로 향한 개구(들)로 적어도 하나의 반응조 유닛을 홀딩하는 로터, 회전축을 중심으로 상기 로터를 회전시키는 모터, 및 하우징을 포함한다.
마이크로티터 플레이트와 같은 반응조 유닛은 반응조 유닛이 회전하면서 세정되거나 처리될 수 있고, 반응조 유닛의 반응조들의 개구는 반지름 방향의 외측을 향한다. 따라서, 반응조들에 수용된 액체가 배출된다. 만약 액체가 휘발성 액체라면, 액체의 일부가 증발될 수 있다. 증발된 액체는 기본적으로 반응조 유닛의 일부에서 응축되어 오염을 일으킬 수 있다.
응축에 따른 오염을 방지하기 위하여, 하우징의 내표면을 냉각시키기 위해 냉각 장치(cooling device)가 구비되어, 증발된 유체가 상기 내표면에서 응축되고 반응조 유닛에서 응축될 수 없게 만든다. 내표면을 냉각시킴으로써, 휘발성 액체가 하우징에서 기체 공기로부터 빠져나와 하우징으로부터 완전히 배출되는 것을 확실히 할 수 있다.
하우징의 내표면을 냉각시키기 위한 냉각 장치는, 바람직하게는 펠티에(Peltier) 요소, 특히 펠티에 포일(Peltier foil)로서, 이는 하우징의 외표면을 커버한다.
하우징의 내표면은, 바람직하게는 하우징 내의 다른 부품에 비해 적어도 2℃ 또는 3℃보다 차갑거나, 적어도 5℃보다 차갑게 유지된다.
본 발명의 다른 목적은 자동실험로봇에 쉽게 통합될 수 있거나, 기존 자동실험로봇에 쉽게 연결될 수 있는, 반응조 유닛을 원심분리하기 위한 원심분리기를 제공함에 있다.
이 목적은 청구항 제4항에 따른 원심분리기에 의해 달성된다. 효과를 갖는 실시예들이 그에 대응하는 종속항들에 정의되어 있다.
반응조 유닛 세정을 위한 원심분리기로, 외측 및/또는 내측으로 향한 개구(들)로 적어도 하나의 반응조 유닛을 홀딩하는 로터, 회전축을 중심으로 상기 로터를 회전시키는 모터를 포함하고, 상기 로터가 회전하는 섹션은 원심분리기 섹션을 형성하며, 반응조 유닛을 상기 원심분리기에 로드(load)하거나 언로드(unload)하기 위한 로딩 매커니즘(loading mechanism)을 포함하고, 상기 로딩 매커니즘은 반응조 유닛의 신장(extension)과 회수(retraction)를 위한 유연성 장형 빔(flexible elongate beam) 및 상기 빔을 신장시키거나 회수하기 위한 구동 수단을 포함하고, 상기 유연성 장형 빔은 신장 상태에서 상기 원심분리기 섹션을 통해 연장되고, 회수 상태에서 상기 원심분리기 섹션으로부터 제거되어, 상기 로터가 자유롭게 회전할 수 있게 된다.
로딩 메커니즘은 더 단순하고 소형의 절연 공간(small insulation space)만을 필요로 하는 원심분리기에 통합될 수 있다. 이 로딩 메커니즘은 유연성 장형 빔을 신장시키거나 회수함으로써, 반응조 유닛을 수평 이동시키도록 구현된다. 그런 수평 이동은 자동실험로봇을 위한 공지의 처리 장치에 쉽게 결합될 수 있는데, 이는 로딩 메커니즘인 오로지 수평적으로 반응조 유닛의 이동 영역(moving range)으로 연장되어 반응조 유닛의 이동 영역 위의 공간을 차단(block)하지 않기 때문이다. 이 공간은 원심분리기나 자동실험로봇의 기타 부품들이 완전히 이용할 수 있다. 다른 공지의 처리 수단은 보통 반응조 유닛의 이동 영역 상에 배치된 부품들을 가진다. 그런 부품들은 다른 요소들, 특히 자동실험로봇의 다른 처리 수단에 부딪힐 수 있다.
유연성 장형 빔은, 바람직하게는, 그의 자유단(free end)에 자성 커플링(magnetic coupling)을 포함한다. 그런 자성 커플링은 자동적으로 반응조 유닛 또는 대응하는 카운터 커플링 요소를 가지는 반응조 유닛 캐리어에 연결될 수 있다. 바람직하게는, 로터가 자성 커플링을 더 포함하고, 반응조 유닛 또는 반응조 유닛 캐리어의 자성 카운터 커플링 요소에 로터의 자성 커플링을 연결함으로써, 반응조 유닛 또는 반응조 유닛 캐리어를 홀딩할 수 있다.
로터는, 빔 수단에 의해 로터 안으로 끌어들여질 때, 반응조 유닛이나 반응조 유닛 캐리어의 이동을 정지시키기 위한 스톱퍼(stopper)를 포함하는 것이 바람직하고, 이에 따라 빔은 반응조 유닛 또는 반응조 유닛 캐리어와 각각 자동적으로 분리된다.
빔은 구부러진 메탈 시트(metal sheet)로 이루어지는 것이 바람직하다. 구부러진 메탈 시트는 구부러져 2개의 스트랜드가 되거나, 릴(reel)에서 감겨진다(winded-up).
상기 설명한 실시예 중 하나에 따른 원심분리기는, 바람직하게는, 로터의 온도 조절(tempering) 및/또는 하우징 내에 수용된 가스의 온도조절을 위한 온도 조절 수단을 포함한다. 이 온도 조절 수단은 0℃, 10℃ 또는 20℃의 최소값과 40℃, 60℃ 또는 80℃의 최댓값의 영역에서 온도를 조절할 수 있다. 그런 온도 조절 수단으로, 반응조 유닛을 원심분리기로부터 언로드하지 않고 배양 단계(incubation step)를 수행할 수 있게 된다. 수행될 생물학적 혹은 화학적 반응의 종류에 따라 온도의 적정 영역이 선택될 수 있다.
하우징은 반응조 유닛의 로드와 언로드를 위한 자동문(automatic door)을 포함하는 것이 바람직하고, 상기 문은 반응조 유닛을 하우징의 내부로 또는 하우징 밖으로 이동시키거나, 혹은, 하우징에 수용된 기체를 교체시키기 위해 개방된다.
원심분리기는 반응조 유닛의 반응조를 스캐닝하기 위한 카메라를 구비할 수 있다. 카메라는 반응조들의 바닥면 또는 반응조들의 측면을 향한 시야(field of vision)를 갖도록 위치한다. 2차원 영역에 배치된 반응조 유닛들을 가진 마이크로티터 플레이트와 같은 반응조 유닛은 바닥면에서 스캔되는 것이 바람직하다.
겔-카드(gel-card)와 같은 일렬로 평행하게 배치된 다수의 반응조들을 포함하는 반응조 유닛은 일측이 유색인 반응조들을 포함하고, 그 반응조들은 타측이 투명 물질(transparent material)로 이루어지는 것이 바람직하다. 유색측은 반응조들이 투명한 측에서 광학 스캔될 때 콘트라스트(contrast)를 향상시킨다.
카메라는 광원(light source), 특히 스트로보스코프(stroboscopic) 광원을 포함하는 것이 바람직하다.
상기 실시예들의 원심분리기는 로터가 수평 회전축 또는 반응조 유닛 원심분리기의 플랫폼에 평행하게 지향(指向)된 회전축을 중심으로 회전하고, 상기 플랫폼은 지정된 사용에 따라 반응조 유닛 원심분리기를 지지하도록 구현되는 것이 바람직하다.
본 발명의 다른 목적은 다목적 원심분리기를 제공함에 있다.
상기 목적은 청구항 제13항에 따른 원심분리기에 의해 달성된다. 바람직한 실시예들이 그에 대응하는 종속항들에 정의되어 있다.
원심분리기는 외측 및/또는 내측으로 향한 개구(들)로 적어도 하나의 반응조 유닛을 홀딩하는 로터, 회전축을 중심으로 상기 로터를 회전시키는 모터 및 로터를 둘러싸는 하우징을 포함하고, 하우징은 반응조 유닛들을 로드하거나 언로드하기 위한 2개의 개구를 포함하며, 상기 개구들은 상기 회전축에 대해 정반대(diametrically opposite)에 배치된다. 2개의 개구로 인하여, 원심분리기에 반응조 유닛이 로드될 수 있고, 원심분리기 안으로 로드되기 전에 반응조 유닛을 뒤집을 필요 없이, 반응조들은 개구들과 함께 회전축에 대해 반지름 방향의 외측 또는 반지름 방향의 내측을 향하게 된다. 이런 원심분리기는 한 편으로는 세척하고 세정하거나 다른 한 편으로는 원심분리하는 데 이용될 수 있다. 반응조 유닛을 뒤집을 필요가 없기 때문에, 이런 원심분리기는 자동실험로봇에 쉽게 통합되어 양자의 기능을 제공할 수 있다.
본 발명의 또 다른 독립적 특성에 따라 제공된 원심분리기는,
- 회전축에 대해 반지름 방향의 외측 또는 반지름 방향의 내측을 향한 개구(들)로 적어도 하나의 반응조 유닛을 홀딩하는 로터
- 회전축을 중심으로 상기 로터를 회전시키는 모터 및 반응조 유닛을 요동시키기 위해 예컨대, 5°에서 20°의 작은 각거리(angular distance)의 로터의 전후 방향 움직임을 제어하기 위한 제어 유닛(control unit)을 포함한다. 이러한 요동 과정은 반응조들을 배출시키거나, 화학적 및/또는 생물학적 반응들을 지지하기 위한 반응조 내의 내용물을 요동시키기 위해 이용될 수 있다.
상기 설명한 실시예들의 원심분리기는 반응조들이 회전축에 실질적으로 평행하게 배치되도록 반응조 유닛을 홀딩하기 위한 용기 섹션(receptacle section)이 구비되는 것이 바람직하다. 따라서, 단지 동일한 원심력이 모든 샘플 물질에 전달된다. 이는 회전축에 실질적으로 평행하게 배치된 복수의 소형 반응조들뿐만 아니라 회전축에 평행한 방향의 주된 연장부를 가진 혈액주머니(blood bag)와 같은 대형 샘플 용기에 모두 적용된다. 나아가, 반응조들의 또 다른 예로 채널(channel), 튜브(tube), 보틀(bottle)이 있다. 반응조들은 마이크로티터 플레이트, 개별 튜브들을 지닌 랙(rack) 또는 혈액주머니나 내부에 액상 스팟을 정의하는 구조물을 가진 슬라이드(slide)와 같은 종류의 용기를 가진 기타 캐리어(carrier) 등에 배치될 수 있다.
또한, 용기 섹션은 복수의 반응조들을 홀딩할 수 있고, 몇몇 반응조들은 회전축에 대해 실질적으로 측방향(lateral direction)으로 배치된다. 이는, 예를 들어, 마이크로티터 플레이트의 경우이며, 이는 많은 수의 반응조들로 이루어진 복수의 열(row)과 반응조들보다 적은 개수를 가진 복수의 행(column)을 포함한다. 열들은 회전축에 평행하게 배치되고, 행들은 회전축에 대해 측방향으로 연장된다. 이 경우, 반응조 유닛은 회전축에 대해 거리를 갖고 배치되고, 그 거리는 반응조 유닛의 측방향 연장보다 실질적으로 큰 것이 적절하다. 회전축과 반응조 유닛 사이의 거리는 측방향 연장과 적어도 같아야 하고, 바람직하게는 반응조 유닛의 측방향 연장의 적어도 1.5배, 2배 또는 3배이다. 이런 배치로, 서로 다른 반응조들에 수용된 모든 샘플에 거의 동일한 원심력을 가하는 것이 가능해진다. 반응조 유닛의 측방향 연장은 측방향으로 가장 바깥에 있는 2개의 반응조의 중심 사이의 거리이다.
평행 회전축을 가진 원심분리기의 또 다른 장점은 플랫폼에 수직인 수직 회전축을 가지는 원심분리기에 비해 작은 공간의 플랫폼만을 필요로 한다는 것이다.
위에 정의된 원심분리기 중 하나는 반응조 유닛의 반응조들에 자동적으로 유체를 분배하는 분배 장치(dispensing device)에 결합될 수 있다. 이런 분배 장치는 원심분리기 안으로 반응조 유닛을 삽입하기 위한 개구 부근에 위치되는 것이 바람직하다. 분배 장치는 하나 이상의 분배 노즐을 포함할 수 있다. 바람직하게는, 분배 노즐의 수가 원심분리기에 사용되는 반응조 유닛의 종류에 맞게 이루어질 수 있다. 분배 장치는 분배 용액(dispensing solution)을 위한 저장소(reservoir)에 연결되고, 분배 노줄에 분배 용액을 자동 펌핑하기 위해 펌프가 구비된다. 분배 용액을 위한 저장소 내에 분배 용액을 가열하기 위한 가열 장치(heating device)가 구비되는 것이 바람직하다.
원심분리기는 로딩 메커니즘을 추가적으로 포함하는 것이 바람직하며, 이는 분배 장치 아래에서 반응조 유닛들이 움직일 수 있도록 구현되어, 반응조 유닛의 이동 방향에 맞추어 배치된 몇몇 반응조들에 하나의 노즐로 분배 유체를 연속적으로 채울 수 있게 된다.
세정 자성 비드(magnetic bead)를 위하여, 반응조 유닛의 세척 및 세정을 위한 원심분리기는 자성 요소를 구비할 수 있고, 이들은 반응조들에 자기장을 가하며, 이에 따라 반응조들 내에 수용된 자성 비드는 자기장에 의해 한 장소에 홀딩된다. 자성 요소는 로터, 특히 로터의 바닥벽(base wall)에 통합되거나, 반응조 유닛 캐리어의 일부일 수 있다. 그런 자성 요소를 이용해 자성 비드를 잃지 않고, 원심분리에 의해 자성 비드들이 세정될 수 있다. 세정용 원심분리기의 이용과 자성 요소의 이용의 결합으로 회전 속도를 조절할 수 있고, 원심분리가 이루어지는 동안 모든 자성 비드를 반응조들 내에 유지시킬 수 있다.
나아가, 본 발명의 목적은 원심분리에 의해 반응조를 비우는 방법을 제공함에 있다.
이 목적은 반응조 유닛이 로터에 놓이고, 반응조 유닛은 개구를 가지는 적어도 하나의 반응조를 포함하며, 상기 반응조 유닛은 상기 반응조를 비우기 위하여 상기 반응조 개구를 반지름 방향의 외측 방향으로 놓고, 로터는 반응조 유닛을 요동시키기 위해 앞뒤로 구동되는 방법에 의해 이루어진다.
반지름 방향의 외측으로 놓인 개구를 갖는 반응조 유닛 내의 적어도 하나의 반응조를 놓은 다음 본 방법은 바람직하게 3개의 단계를 포함한다. 첫 번째로, 로터를 대략 180도 이동시켜 적어도 하나의 반응조를 뒤집는다. 이에 따라 반응조는 원심분리기에서 최상 위치가 최하 위치로 이동된다. 이런 반회전(half rotation)의 속도는 반응조들 사이에서 넘치는 것을 방지하기 위해 너무 느리지도 않고 너무 빠르지도 않도록 조절된다. 너무 느린 회전 속도라면 샘플 액체가 한 반응조에서 다른 인접한 반응조로 쏟아질 수 있다. 너무 빠른 회전 속도라면 샘플 액체가 반응조들에서 하우징의 벽부로 튈 수 있다. 최초 프로세스에서 반응조들은 다량의(high-volume)의 샘플 액체로 채워져 있기 때문에, 하우징의 벽부로 튀는 액체는 반응조 안으로 다시 튀거나 반응조 안으로 떨어질 수 있다. 하지만, 반회전의 적절한 속도를 선택함으로써, 거꾸로 뒤집힐 때 기본적으로 대부분의 샘플 액체가 반응조로부터 떨어져 하우징 바닥에 용이하게 수집될 수 있다. 쏟아짐을 방지하기 위해, 플레이트는 180도당 0,2에서 1초의 적절한 회전 속도로 회전되어야 한다.
두 번째 단계로, 5°에서 20°의 작은 각거리를 갖고 앞뒤로 로터의 이동을 제어하는 제어 유닛에 의해, 반응조 유닛은 최하 위치 부근에서 요동된다. 이러한 요동 과정에 의해, 첫 번째 회전 프로세서에서 떨어지지 않은 샘플 액체가 반응조로부터 배출될 것이다.
세 번째 단계는 반응조로부터 잔존하는 불필요한 모든 샘플 액체를 제거하기 위하여, 고속(예를 들어, 500에서 3500rpm)에서 이루어지는 반응조 유닛의 원심분리를 포함한다.
이 방법은 배출된 샘플 액체를 용이하게 수집하면서 쏟아질 위험 없이 반응조를 깨끗하고 빠르게 비울 수 있게 만든다. 채워진 반응조(들)을 180도 회전시키는 것만으로는 잔존 액체가 모세관힘(capillary force) 때문에 반응조 내에 남을 것이다. 최하 위치 부근에서 반응조(들)을 요동시키는 것은 이런 힘들을 극복하여 더 많은 샘플 액체를 제거하는데 도움을 줄 것이다. 하지만, 요동 단계 이후에도, 소량의 액체가 반응조 안에 다시 유지될 것이다. 이러한 미량의 것은 2초에서 1분 사이의 긴 시간 동안 고속으로 시계방향 및/또는 반시계방향으로 실제 원심분리하는 최종 단계에 의해 제거될 것이다. 따라서, 완벽하게 건조된 반응조를 얻을 수 있고, 이에 의하여 배출될 액체가 원심분리기의 하우징의 바닥부에 용이하게 수집된다.
본 발명의 또 다른 목적은 혈액형 판정과 같은 겔 분리 수단에 의한 평행시험용 방법을 제공함에 있고, 높은 처리량이 달성된다.
상기 목적은 청구항 제15항에 의해 달성된다. 본 방법은 아래의 단계들을 포함한다.
- 영역(region)들 안의 샘플 물질을 겔(gel)로 채워진 2차원 어레이로 배치된 반응조들에 분배하는 단계
- 반응조들의 어레이를 원심분리하는 단계
- 상기 반응조들을 광검출하는 단계
마이크로티터 플레이트는 2차원 영역에 배치된 반응조들을 포함한다. 따라서, 일렬로 배치된 반응조들만 가지는 반응조 유닛에 비해, 더 많은 수의 샘플을 동시적으로 검사하는 것이 가능해진다.
반응조들은 광학적으로 검출되고, 하방 또는 상방의 시야(field of vision)로부터 반응조 어레이(마이크로티터 플레이트)의 반응조들을 광학 검출하면 원하는 결과가 달성되는지를 신뢰성 있게 검출할 수 있다는 것이 증명된 바 있다. 이 방법은 혈액형 판정에 이용되며, 자동적으로, 그리고 신뢰성 있게 A, B 및 O의 혈액형이 검출되고 구별될 수 있다.
바람직하게는, 광학 검출이 하방 및 상방 모든 측면으로부터 반응조 어레이상에 대해 수행된다.
덧붙여, 겔 분리 수단에 의한 상기 테스트용 마이크로티터 플레이트를 자동적으로 준비하는 것이 가능하고, 여기서,
마이크로티터 플레이트의 반응조들 내에 겔이 채워지고,
마이크로티터 플레이트는 상기 겔에 기포(air bubble)가 없도록 원심분리된다.
본 방법의 원심분리 단계들은, 바람직하게는, 위에서 정의된 원심분리기로 수행된다.
반응조들을 겔로 채우는 대신, 마이크로티터 플레이트가 이미 겔로 채워진 반응조들을 포함하는 것을 이용할 수도 있다.
샘플 물질 및 시약(reagent)을 반응조들 안의 겔필링(gel filling)으로 분배시킨 다음 소정 시기 동안 기설정된 온도에서 마이크로티터 플레이트를 유지하는 배양 단계(incubation step)가 수행될 수 있다. 더욱 바람직하게는, 마이크로티터 플레이트가 배양 단계를 수행하기 위해 원심분리기 안에 유지되고, 원심분리기는 적절한 온도조절 장치를 포함한다.
본 발명에 따른 원심분리기는 많은 종류의 분석에 이용될 수 있다. 가능한 분석의 예로, 마이크로티터 플레이트 수단에 의한 혈액형판정, 세포 분석(cellular assay), 자성 비드를 포함하는 분석 또는 반응조들의 풀 커버리지(full coverage)를 보증하는 2개의 분리상(seperate phases)의 형성을 보장하는 오일 오버레이(oil overlay)를 갖는 PCR이 있다.
본 발명은 PCT/EP2013/052356에 따른 원심분리기를 더욱 개선한 것이다. PCT/EP2013/052356은 참조로서 여기에 포함된다.
본 발명은 첨부된 도면에 도시된 실시예를 수단으로 아래에서 더욱 상세히 설명될 것이다.
도 1은 본 발명에 따른 제1 실시예의 원심분리기의 사시도이다.
도 2는 도 1에 따른 원심분리기의 전측벽(front side wall)이 없는 하우징 및 로터의 사시도이다.
도 3은 전측벽이 없는 하우징 및 로터의 전면도이다.
도 4는 반응조 유닛 캐리어의 사시도이다.
도 5는 반응조 유닛 캐리어 및 반응조 유닛을 수용한 로터의 사시도이다.
도 6은 전면 플랫폼(front platform), 로터 및 로딩 메커니즘을 개략적으로 도시한 사시도이다.
도 7은 로딩 메커니즘과 로터 사이의 인터페이스 섹션 내의 도 6에 따른 구조의 사시도이다.
도 8은 본 발명에 따른 제2 실시예의 원심분리기의 사시도이다.
도 9는 하우징이 없는 도 8에 따른 원심분리기의 사시도이다.
도 10은 하우징이 없는 도 8에 따른 원심분리기의 측면도이다.
도 11은 본 발명에 따른 제3 실시예의 원심분리기의 사시도이다.
도 12는 하우징이 없는 도 11에 따른 원심분리기의 사시도이다.
도 13은 하우징이 없는 도 11에 따른 원심분리기의 측면도이다.
도 14는 하우징 일부가 절개된, 원심분리 겔 카드의 또 다른 예의 사시도이다.
도 15는 도 14에 따른 실시예의 1개의 로터 및 자동 리드(lid)를 나타낸다.
도 16은 반응조 유닛 캐리어의 사시도이다.
도 17은 하나의 반응조에서 자성 비드와 자성 로드를 가진 분석을 위한 가능한 실험 구조의 예를 나타낸다.
도 18a 내지 18d는 마이크로플레이트와 함께 로드를 조작하는 로드와 피펫팁(pipetting tip)의 다른 도면이다.
도 1은 본 발명에 따른 제1 실시예의 원심분리기의 사시도이다.
도 2는 도 1에 따른 원심분리기의 전측벽(front side wall)이 없는 하우징 및 로터의 사시도이다.
도 3은 전측벽이 없는 하우징 및 로터의 전면도이다.
도 4는 반응조 유닛 캐리어의 사시도이다.
도 5는 반응조 유닛 캐리어 및 반응조 유닛을 수용한 로터의 사시도이다.
도 6은 전면 플랫폼(front platform), 로터 및 로딩 메커니즘을 개략적으로 도시한 사시도이다.
도 7은 로딩 메커니즘과 로터 사이의 인터페이스 섹션 내의 도 6에 따른 구조의 사시도이다.
도 8은 본 발명에 따른 제2 실시예의 원심분리기의 사시도이다.
도 9는 하우징이 없는 도 8에 따른 원심분리기의 사시도이다.
도 10은 하우징이 없는 도 8에 따른 원심분리기의 측면도이다.
도 11은 본 발명에 따른 제3 실시예의 원심분리기의 사시도이다.
도 12는 하우징이 없는 도 11에 따른 원심분리기의 사시도이다.
도 13은 하우징이 없는 도 11에 따른 원심분리기의 측면도이다.
도 14는 하우징 일부가 절개된, 원심분리 겔 카드의 또 다른 예의 사시도이다.
도 15는 도 14에 따른 실시예의 1개의 로터 및 자동 리드(lid)를 나타낸다.
도 16은 반응조 유닛 캐리어의 사시도이다.
도 17은 하나의 반응조에서 자성 비드와 자성 로드를 가진 분석을 위한 가능한 실험 구조의 예를 나타낸다.
도 18a 내지 18d는 마이크로플레이트와 함께 로드를 조작하는 로드와 피펫팁(pipetting tip)의 다른 도면이다.
원심분리기(centrifuge)의 제1 실시예(도 1 내지 7)가 반응조 유닛(reaction vessel unit)의 세척 및 세정을 위해 설계된다. 반응조 유닛은 마이크로티터 플레이트(microtiter plate)(2)이다. 마이크로티터 플레이트(2)는 2차원 어레이(array)로 배열된 복수의 반응조(reaction vessel)(3)를 포함한다. 일반적으로 그런 마이크로티터 플레이트는 96, 384 또는 1,536 반응조(3)들을 포함한다.
원심분리기(1)는 전면 플랫폼(front platform)(4), 원심분리기 섹션(centrifuge section)(5) 및 구동 섹션(driving section)(6)을 포함한다(도 1).
전면 플랫폼(4)은, 상면도에서, 표준 마이크로티터 플레이트보다 살짝 큰 사각 형상을 가진다. 원심분리기 섹션(5)에 인접한 모서리를 제외하고, 모든 측면 모서리에 림(7)들이 구비된다.
원심분리기 섹션(5)은 로터(rotor)(8)와 하우징(housing)(9)을 포함한다. 로터(8)는 수평 샤프트(horizontal shaft)(10)(도 2, 3)에 장착된다. 로터(8)는 각각 하나의 마이크로티터 플레이트(2)를 위한 2개의 용기 섹션(receptacle section)을 포함한다. 용기 섹션들은 플레이트 트레이(plate tray)(11)로서 구현된다. 플레이트 트레이(11)들은 각각 사각형의 저벽(base wall)(12)과 2개의 U-레일(rail)(13)에 의해 정의된다. 각각의 U-레일(13)은 베이스 섕크(base shank)(14)와 상기 베이스 섕크(14)에 장착된 사이드 섕크(side shank)(side shank)(15)와 상기 저벽(12)으로부터 이격된 또 다른 사이드 섕크(16)를 포함한다. 베이스 섕크(14)는 저벽(12)에 직교하게 배치되고, 사이드 섕크(15,16)는 각각 베이스 섕크(14)로부터 로터(8)의 중심측으로 연장되고, U-레일(13)들은 개방된 측면이 반대로 배치된다.
2개의 플레이트 트레이(11)의 2개의 저벽(12)들은 서로 평행하고, 중심 보어(center bore)(17)들이 2개의 저벽(12) 사이 섹션에 구비되며, 이를 통해 샤프트(10)가 연장된다. 중심 보어(17)들은 로터(8)의 무게 중심(center of mass)에 배치된다. 샤프트(10)의 중심은 회전축(rotation axis)(18)을 정의한다. 로터(8)는 회전축(18)에 대해 대칭적으로 구현된다.
본 실시예에서, 저벽(12)들, U-레일(13)들 및 저벽(12)들 사이의 섹션은 하나의 단일 피스의 알루미늄으로 이루어진다.
로터(8)의 전면에는, 마이크로티터 플레이트가 플레이트 트레이(11) 안으로 슬라이드될 수 있도록 플레이트 트레이(11)들이 개방되어 있다. 로터(8)의 후면에는, 스톱퍼(stopper)(19)가 구비된다. 스톱퍼(19)는 자성 요소(magnetic element)를 포함하는 것이 바람직하다.
관성모멘트(moment of inertia)를 최소화하기 위해, 가능하면 저벽(12)들 사이의 섹션이 잘려나가고, 저벽(12)들 사이에 보어들이 구비된다.
본 실시예에서, 플레이트 트레이(11)들은 마이크로티터 플레이트 캐리어(20)와 함께 있는 마이크로티터 플레이트(2)를 수용하도록 설계된다(도 4). 마이크로티터 플레이트 캐리어(20)는 측면 모서리에 림(21)들을 가지는 사각형 프레임이고, 림(21)의 내표면(inner surface)은 작은 영향으로 마이크로티터 플레이트 캐리어(20)상의 마이크로티터 플레이트(2)의 위치를 정의한다. 마이크로티터 플레이트가 림(21)들에 의해 정의되는 섹션 안으로 슬라이딩되도록 림들의 상면은 안쪽으로 젖혀져 있다.
마이크로티터 플레이트 캐리어(20)는 일측 모서리에 자성 물질로 이루어진 커플링 요소(coupling element)를 포함하며, 특히 강자성 물질(ferromagnetic material)로 이루어진다. 이 커플링 요소(22)는 자성 스톱퍼(19) 및 로터(8)와 협력할 수 있다.
멀리 떨어진 혹은 외측 사이드 섕크(16)에서 내측 사이드 섕크(15) 또는 저벽(12)까지의 거리는 마이크로티터 플레이트(2) 및 마이크로티터 플레이트 캐리어(20)가 작은 영향으로 방사 방향으로 홀딩될 수 있도록 설계된다. 이 영향은 마이크로티터 플레이트 캐리어(20) 및 마이크로티터 플레이트(2)가 플레이트 트레이(11) 안이나 밖으로 용이하게 슬라이드될 수 있게 한다. 외측 사이드 섕크(16)는 마이크로티터 플레이트(2)의 어떤 반응조(3)도 커버하지 않을 정도로 작다.
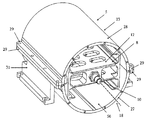
로터(8)는 하우징(23)에 둘러싸인다. 하우징(23)은 원통형 덮개벽(jacket wall)(24), 전측벽(front side wall)(25) 및 후측벽(rear side wall)(26)을 포함한다(도 1 및 2). 덮개벽(24)은 하부 및 상부 하프셸(half shell)(27,28)을 포함하고, 이들은 외측으로 배치된 플랜지(flange)(29)들에 의해 연결된다. 덮개벽(24)의 내표면은 실질적으로 원통 형상이고 회전축(18)을 공통 축으로 배치된다. 덮개벽(24), 전측벽(25) 및 후측벽(26)에 의해 정의되는 하우징(23)의 내부 공간을 이하에서는 "로터 공간(rotor space)(56)"으로 부른다.
드레인(drain)(30)은 덮개벽(24)의 내표면의 하부 섹션에 구비된다. 드레인은 홈(groove)으로 구현되며, 홈의 깊이는 하우징(23)의 후측 방향으로 연속적으로 증가한다. 하우징(23)의 후측에서, 흡입 펌프(aspiration pump)(미도시)는 하우징(23)으로부터 유체를 배출하기 위해 드레인(30)에 연결된다. 드레인(30)은 덮개벽(24)의 내표면과 함께 날카로운 모서리(sharp edge)를 형성한다.
로터(8)의 반지름 방향의 최외곽 부분과 덮개벽(24)의 내표면 사이의 갭(gap)(g)은, 바람직하게는, 1밀리미터보다 크지 않고, 특히 0.75밀리미터보다 크지 않으며, 더욱 바람직하게는 0.5밀리미터보다 크지 않다. 갭이 작을수록, 하우징(23) 내에서 로터(8)가 회전하면 더 센 순환 기류가 생성된다. 하지만, 이 갭(g)은 0.1밀리미터보다 작지 않은 것이 바람직하고, 특히 0.2밀리미터 또는 0.3밀리미터보다 작지 않아야 하는데, 이는 그렇게 작은 갭들은 로터가 덮개벽(24)의 내표면상의 유체막(fluid film)과의 접촉을 유발하기 때문이다. 이는 아래에서 더욱 상세히 설명된다.
하우징(23)을 플랫폼(미도시)상에 고정하기 위해 하부 하프셸의 플랜지(29)가 지지부(support)(31)들에 연결된다.
전측벽(25)은 사각 슬리드(slid) 형상의 개구(opening)(32)를 포함한다. 개구(32)를 닫기 위한 자동문(automatic door)이 구비된다. 개구(32)는 전면 플랫폼(4)의 높이(level)에 배치된다. 로딩 위치에서, 로터(8)는 그의 저벽(12)과 수평적으로 배치되고, 상부 플레이트 트레이(11)의 저벽은 전면 플랫폼(4)과 동일한 높이에 배치되어, 마이크로티터 플레이트 캐리어(20) 및 마이크로티터 플레이트(2)가 전면 플랫폼(4)에서 상부 플레이트 트레이(11)로 수평적으로 슬라이딩될 수 있고, 그 역도 마찬가지이다.
구동 섹션(6)은 샤프트(10) 및 로터(8)를 회전시키기 위한 모터(미도시)를 포함한다. 모터는 회전 속도 제어를 위한 제어 유닛(control unit)에 연결된다.
로딩 메커니즘(33)은 마이크로티터 플레이트(2) 또는 마이크로티터 플레이트(2)와 함께 있는 마이크로티터 플레이트 캐리어(20)의 연장 및 회수를 위한 유연성 장형 빔(34)을 포함한다. 유연성 장형 빔(34)은 메탈 시트(metal sheet)의 스트라이프(stripe)로 이루어지고, 이는 그의 길이방향 연장에 가로질러 살짝 구부러진다. 그래서, 메탈 시트는 선형적으로 연장되었을 때 특정 강성(stiffness)을 제공하며, 한편으로는 길이방향 연장에 가로지르는 축을 중심으로 구부러질 수 있다. 이렇게 구부러진 메탈 시트 스트라이프는 메탈 측정 테이프로부터 잘 알려져 있다.
본 실시예에서, 빔(34)의 일단(one end)은 구동 섹션(6)의 내벽(inner wall)(34)에 고정되고, 빔은 내벽(35)의 뒤쪽으로부터 연장된다. 빔(34)은 유턴(U-turn)으로 구부러져 빔의 자유단(free end)(36)이 앞쪽을 향하고, 빔은 내벽(35)에서 슬리드(slid)를 통해 연장된다. 따라서, 빔은 내벽(35)에 고정된 상부 스트랜드(upper strand)(37)와 내벽(35)의 슬리드를 통해 연장된 하부 스트랜드(lower strand)(38)를 포함한다. 내벽(35)을 통해 연장되고 자유단(36)을 갖는 스트랜드(38)는 2개의 휠(wheel)(40) 사이에서 클램핑 고정되고, 2개의 휠(40) 중 하나는 스텝퍼 모터(stepper motor)(41)에 의해 구동된다. 2개의 휠 중 단 하나만 도면에서 보여진다. 빔(34)의 자유단(36)은 자성 요소(magnetic element)(42)를 구비한다. 자성 요소(42)를 가진 자유단(36)이 연장되거나, 원심분리기 섹션(5) 및 전측벽(25)의 개구(32)를 지나갈 수 있도록 빔(34)은 스텝퍼 모터(41)의 수단을 이용해 작동될 수 있다. 따라서, 빔(34)의 자유단(36)은 최대 연장 위치에서 전면 플랫폼(4) 영역에 도달한다. 최대 회수 위치에서, 빔(34)의 자유단(36)은 로터(8)의 후면, 특히, 원심분리기 섹션(5)에서 빠져나와 배치되고, 이에 따라 로터(8)가 자유롭게 회전될 수 있다.
로딩 메커니즘(33)은 빔(34)의 자성 요소(42)가 마이크로티터 플레이트 캐리어(20)의 커플링 요소(22)를 통해 연결될 때까지 빔(34)을 연장시키는 것만으로 전면 플랫폼(4)에 위치한 마이크로티터 플레이트 캐리어(20)에 연결될 수 있다. 빔(34)을 회수함으로써, 마이크로티터 플레이트 캐리어(20)는 로터(8)의 플레이트 트레이(11) 안으로 끌려간다. 마이크로티터 플레이트 캐리어(20)가 스톱퍼(19)에 인접할 때, 빔을 더 회수함으로써 빔(34)의 자성 요소(42) 및 마이크로티터 플레이트 캐리어(20)의 연결 요소(22) 사이의 연결이 해제되고, 이와 동시에 마이크로티터 플레이트 캐리어(20)의 연결 요소(22)가 스톱퍼(19)의 자성 요소와 연결되어 로터(8) 내에서 위치가 고정된다.
이 로딩 메커니즘(33)은 원심분리기(1)를 자동실험로봇에서 마이크로티터 플레이트를 이송하는 다른 이송 시스템(transport system)에 연결할 수 있게 만든다. 실험 로봇은 마이크로티터 플레이트(2)를 전면 플랫폼(4)에 위치한 마이크로티터 플레이트 캐리어(20)로 올려놓기만 하면 된다. 이후, 로딩 메커니즘(33)이 로터(8)를 로드하거나 언로드시킬 수 있다. 또한, 전면 플레이트 없이 원심분리기(1)를 마이크로티터 플레이트 이송을 위한 이송 벨트에 바로 인접하게 위치시키는 것도 가능하고, 이때 마이크로티터 플레이트(2)는 로딩 메커니즘(33)으로 이송 벨트로부터 끌려나오고 다시 이송 벨트에 놓일 수 있다. 본 실시예에서는 연결 요소(22)들을 가지는 마이크로티터 플레이트 캐리어(20)가 이용되었다. 또한, 그런 연결 요소(22)들을 가지는 마이크로티터 플레이트가 제공되어 마이크로티터 플레이트 캐리어가 필요없을 수도 있다.
또 다른 이점은, 로딩 메커니즘(33)이 원심분리기(5)의 후측에 위치해서 다른 매개 장치 없이 원심분리기(1)가 기존의 실험 로봇에 연결될 수 있다는 점이다. 이는 원심분리기를 기존의 실험 로봇에 통합시키는 것을 가능케 한다.
나아가, 로딩 메커니즘(33)은 작은 설치 공간만을 필요로 한다. 이 설치 공간은 빔이 2개의 스트랜드로 구부러지는 대신 릴(reel)에 감겨있게 되면 훨씬 더 줄어들 수 있다.
원심분리기(1)는 마이크로티터 플레이트(2) 세척에 이용된다. 반응조(3)들 안에서 액체를 수용하는 마이크로티터 플레이트(2)는 전면 플랫폼(4)에 위치하는 마이크로티터 플레이트 캐리어(20)에 놓인다. 마이크로티터 플레이트 캐리어(20)는 로딩 메커니즘(33)의 수단을 이용해 마이크로티터 플레이트(2)와 함께 플레이트 트레이(11)들 중 하나로 끌어 당겨진다. 마이크로티터 플레이트 캐리어(20)는 자기적으로(magnetically) 스톱퍼(19)와 연결된다.
로터는 회전하는데, 그 회전 속도는 제어 유닛에 의해 5-3,000RPM의 범위에서 제어된다. 원심력 때문에, 액체는 반응조(3)들로부터 배출된다. 이 원심성 세정(centrifugal washing)에 의해, 내부에 모세관힘이 발생하는 작은 반응조들로부터도 액체를 확실히 제거하는 것이 가능해진다. 따라서, 액체는 384 또는 1,536 반응조를 갖는 마이크로티터 플레이트들로부터 확실히 제거될 수 있다.
원심분리하는 동안 액체는 반응조(3)들로부터 배출되고 액체 방울들이 덮개벽(24) 내표면에 나쁜 영향을 준다. 액체 방울들은 덮개벽(24)의 내표면에 액체막(liquid film)을 형성한다. 로터(8)의 회전 및 덮개벽(24) 내표면과 로터(8) 사이의 작은 갭 때문에, 강한 회전 기류가 야기되는데, 이는 덮개벽(24) 내표면의 액체막을 로터의 회전방향으로 흐르도록 힘을 가한다. 이에 따라, 액체가 드레인(30)으로 이동되고, 여기서 액체는 흡입 펌프의 수단에 의해 끌어 당겨진다.
하우징(23)의 내부 공간으로부터 액체를 확실히 배출하기 위해, 회전 속도는 적어도 500RPM인 것이 바람직하고, 특히 적어도 1,000RPM이며, 더욱 바람직하게는 적어도 1,500RPM이다. 회전 속도는 액체의 표면장력과 로터(8)와 덮개벽(24) 사이의 갭에 따라 조절되어야 한다.
바람직하게는, 로터(8)를 제2 회전 방향으로 회전시킴으로써, 제1 회전 방향에서 드레인(30)의 후측에서 덮개벽(24)의 내표면의 액체막이 드레인(30)으로 이동하도록 회전 방향이 원심분리 단계의 끝에서 반전된다.
마이크로티터 플레이트를 원심분리한 후 반응조에 남아 있는 액체의 잔존량은 액체의 양을 예를 들어 200㎕ 적용했을 때 0.01㎕보다 적다고 알려져 있다. 액체는 세정 용액(washing solution)일 수 있고, 한 번의 세정 단계에서 희석률(dilution ratio)은 20,000:1이 달성된다. 마이크로티터 플레이트를 세정하는 보통의 세정기는 40:1의 희석률로 규정된다. 그런 원심분리기를 이용하면 희석률을 5,000배 증가시킨다.
코팅된 반응조들을 갖는 마이크로티터 플레이트는 면역분석 프로세스를 위해 이용된다. 코팅으로 제1 특이결합멤버가 반응조 내에서 결박된다. ELISA와 같은 전형적인 면역분석 프로세스에서 제2 특이결합멤버는 결박된 제1 특이결합 멤버와 복합체(complex)를 형성한다. 비특이결합요소(non-specifically bound component)들은 반응조들로부터 제거되어야 한다. 이는 원심분리기(1)를 이용하여 특정 세정 용액을 반응조(3)에 분배시키고, 마이크로티터 플레이트를 원심분리하고, 최종적으로 세정 단계를 반복함으로써 적은 수의 세정 단계로 달성될 수 있다.
만약 96 반응조들을 갖는 대형 반응조들을 가진 마이크로티터 플레이트가 사용되는 경우라면, 처음에 로터가 180°만큼 한 번만 회전된다면 효과적일 수 있고, 이에 반응조(3)의 개구들이 하방을 향하게 된다. 이후 대량의 액체가 반응조들로부터 흘러나온다. 이는 로터가 5°에서 20°의 작은 각거리(angular distance)를 갖고 앞뒤로 이동하는 마이크로티터 플레이트의 요동 운동에 의해 도움을 받을 수 있다
또한, 제1 특이결합멤버를 자성 비드(magnetic beads)에 결박시키는 것이 알려져 있다. 자성 비드는 마이크로티터 플레이트의 반응조들 안으로 넣어질 수 있고, 면역분석(효소면역검정(Enzyme Immuno assay), EIA; 화학발광 면역분석법(Chemiluminescent Immuno Assay, CLIA) 프로세스가 수행될 수 있다. 어떠한 경우에도 이러한 자성 비드들은 세정되어야 한다.
비드 또는 기타 고체 표면(solid surface)의 세정 효율의 차이는 필요로 하는 세정 단계의 수에 의존한다. 전형적인 고민감도 분석(예를 들어, 미국의 Quanterix사의 기술에 의한)은 잔존량이 1018(!!)보다 많은 인자(factor)에 의해 희석되어야 하기 때문에, 12개의 연속적인 세정 단계를 필요로 한다. 원심분리기에 의한 세정은 세정 단계의 개수를 과감히 삭제함으로써, 분석 작업 흐름의 상당한 개선으로 이어진다.
세정 자성 비드를 위해 마이크로티터 플레이트 캐리어(20)(도 16)는 다수의 자성 요소(57)들을 가진 플레이트를 포함하도록 구비된다. 개수는 플레이트 영역을 커버하는 하나의 대형 자석당 한 개 또는 한 개 이상일 수 있고, 자성 소자들은 상기 플레이트에 규칙적으로 분포된다. 이 자성 요소(57)들은 반응조들에 자기장을 가한다. 세정 단계 동안, 원심분리기의 회전 속도는 자성 소자들에 가해지는 원심력이 자성 비드와 마이크로티터 플레이트 캐리어의 자성 소자들 사이의 자기력보다 작도록 조절될 것이다. 자기력과 원심력은 자성 비드들의 물질이나 크기에 따라 다르다. 어떠한 자성 비드도 잃지 않고 자성 비드들을 확실히 세정할 수 있다는 것이 증명된 바 있다. 캘리브레이션 단계(calibration)에서, 로터 공간(56)으로부터 흡입 펌프에 의해 배출된 액체 내에 포함된 자성비드들이 검출되며, 여기서 회전 속도는 점진적으로 증가한다. 이는 드레인(30)의 배출구(outlet)에 인접하게 배치된 홀 센서(hall sensor)와 같은 자기 센서(magnetic sensor)의 수단으로 이루어질 수 있다. 액체에서 자성 비드를 검출한 뒤, 실질적인 회전 속도가 포착되고, 기설정된 특정의 작은 크기로 줄어든다. 이 회전 속도는 자성 비드들을 세정하기 위한 일련의 세정 단계에서 이용된다.
위에서 설명된 원심분리기(1)의 제1 실시예는, 바람직하게는 알루미늄과 같은 열전도 물질로 이루어진 원통형 덮개벽(24)을 포함한다. 덮개벽은 냉각 수단(cooling means)을 구비할 수 있고, 이에 따라 덮개벽(24)의 내표면이 냉각될 수 있다. 덮개벽(24)의 내표면은, 바람직하게는 로터(8)와 덮개벽(24) 내의 기타 다른 부품보다 차갑게 유지된다. 이에 의하여, 유체가 덮개벽(24)의 내표면에서만 응축되고, 로터(8)나 기타 다른 부품에서 응축되지 않는 것이 담보된다. 덮개벽(24)의 내표면에서 응축된 유체는 위에서 설명한 바와 같이 드레인(30)을 통해 하우징(23)으로부터 확실히 배출된다. 바람직하게는, 덮개벽(24)의 내표면은 로터 공간(56) 내의 다른 부품들보다 적어도 2℃ 또는 3℃보다 차갑게, 혹은 5℃ 이상 차갑게, 및/또는 로터 공간(56) 내에 수용된 기체(gas)보다 차갑게 유지되며, 이에 따라 로터 공간 내에 수용된 가스로 증발되는, 반응조 내의 액체로부터 발생하는 유체가 오로지 덮개벽(24)의 내표면에서만 재응축된다. 덮개벽(24)을 냉각시킴으로써, 하우징(23) 내의 기체 공기(gas atmoshphere)로부터 배출되어 하우징(23)으로부터 완전히 배출되는 것을 담보할 수 있다.
덮개벽(24)을 냉각시키기 위한 냉각 수단은 바람직하게는 펠티에 요소(Peltier element)이고, 특히 펠티에 포일(Peltier foil)이며, 이는 덮개벽(24)의 외표면을 커버한다. 그런 펠티에 요소는 덮개벽(24)의 열을 반지름 방향의 외측으로 전달한다. 이에 따라, 덮개벽(24)의 내표면은 차갑게 유지되고, 펠티에 요소의 외측은 따뜻하다. 따라서, 유체의 응축은 덮개벽(24)의 내표면에서만 나타나고, 원심분리기의 기타 다른 부품에서는 나타나지 않는다.
원심분리기(1)는 로터 공간(56) 내의 기체(gas)나 공기(air)를 각각 교체하기 위한 환기 시스템(venting system)을 포함할 수 있다. 환기 시스템은 예를 들어 후측벽(26)의 개구에 연결된 통풍기(blower)를 포함한다. 전측벽(25)의 개구가 열릴 때, 로터 공간(56) 내의 공기는 통풍기를 동작시킴으로써 교체될 수 있다. 가스 또는 공기의 교체는 보통 2개의 연이은 원심분리 프로세스 사이에 수행된다.
또한, 환기 시스템은 가열/냉각 장치에 연결되어 로터 공간(56)으로 유입되는 공기가 가열되거나 냉각될 수 있다. 그런 환기 시스템은 로터 공간(56) 내부를 기설정된 온도로 조절하기 위한 온도조절 장치(tempering device)를 형성한다.
원심분리기의 제2 실시예(도 8 내지 10)는 반응조 유닛들을 원심분리하도록 설계된다. 반응조 유닛은 마이크로티터 플레이트(2)이다. 원심분리기(1)의 제2 실시예는 제1 실시예와 유사하게 구현되고, 유사 부품은 동일한 참조 번호로 표기되어 있다. 이런 부품들은 다른 설명이 없는 한 제1 실시예의 것들과 동일하다.
이 원심분리기(1)는 전면 플랫폼(4), 원심분리기 섹션(5) 및 구동 섹션(6)을 포함한다(도 9). 원심분리기 섹션(5)은 수평 샤프트(10)에 장착된 로터(8)를 포함한다(도 9). 로터는 하나의 마이크로티터 플레이트(2)를 수용하기 위한 하나의 용기 영역 또는 플레이트 트레이(11)를 포함한다. 플레이트 트레이(11)는 사각형상의 저벽(12)과 2개의 U-레일(U-rail)(13)에 의해 정의된다. 저벽(12)은 플랜지(44)를 가진 레그(leg)(43)의 수단에 의해 연결되고, 이는 중심 보어(central bore)(17)를 정의하며 이를 통해 샤프트(10)가 연장된다. 제2 실시예에서, 저벽(12)과 샤프트(10) 사이의 거리는 제1 실시예에 비해 훨씬 크다. 그런 로터에 의해, 반응조 유닛들은 측면 연장(lateral extension)을 갖고 원심분리될 수 있고, 모든 반응조들에서 거의 동일한 원심분리 효과를 가진다. 플레이트 트레이(11)의 회전축(18)까지의 거리는, 바람직하게는, 반응조 유닛의 측면 연장보다 크며, 바람직하게는 반응조 유닛의 측면 연장보다 1.5배 또는 2배 크다.
용기 섹션 또는 플레이트 트레이(11)의 정반대(diametrically opposite)에 또 다른 레그(46)의 수단에 의해 균형추(counterweight)(45)가 플랜지(44)들에 고정된다. 균형추(45) 대신 또 다른 플레이트 트레이가 구비될 수 있고, 이는 다른 플레이트 트레이(11)에 이용되는 마이크로티터 플레이트와 같은 종류의 조절 가능한 균형추를 형성하기 위하여, 마이크로티터 플레이트 또는 마이크로티터 플레이트와 함께 있는 마이크로티터 플레이트 캐리어를 수용하도록 구현된다.
전측벽(25)의 개구는 플레이트 트레이(11)의 최하 위치의 높이로 구현되며, 이는 로터(8)의 로딩 위치이다. 전면 플랫폼(4)은 로딩 위치에서 플레이트 트레이(11)의 저벽(12)과 동일한 높이에 구비되어 마이크로티터 플레이트 또는 마이크로티터 플레이트 캐리어상의 마이크로티터 플레이트가 전면 플랫폼(4)으로부터 저벽(12)으로 슬라이드되거나 그 반대로 될 수 있으며, 여기서 마이크로티터 플레이트(2)의 반응조(3)들의 개구는 샤프트(10) 쪽을 향한다.
전측벽(25)의 개구(32)는 자동문(미도시)에 의해 닫힐 수 있다.
원심분리기(1)는 샤프트(10)를 구동시키기 위한 모터(47) 및 제1 실시예에서와 동일한 로딩 메커니즘(33)을 포함하며, 여기서 마이크로티터 플레이트 또는 마이크로티터 플레이트 캐리어상의 마이크로티터 플레이트를 로드하거나 언로드하기 위하여, 로딩 위치에서 로터(8)의 저벽(12) 높이보다 살짝 위에 유연성 장형 빔(34)이 그의 자유단(36)과 자성 요소(42)를 갖게 배치된다.
이 원심분리기는 마이크로티터 플레이트(2)를 원심분리하도록 설계된다. 마이크로티터 플레이트와 샤프트(10) 또는 회전축(18) 사이의 거리가 커짐에 따라, 거의 동일한 원심 가속도(centrifugal acceleration)가 서로 다른 반응조(3)들 내의 유체에 가해진다. 따라서, 유체가 중앙에 있는 반응조에 위치하든 측면에 있는 반응조에 위치하든지 무관하게 동일한 원심분리 효과가 달성된다.
로터의 가속뿐만 아니라 속도를 제어하기 위해 제어 유닛이 구비된다. 로터의 속도는 100RPM에서 300RPM의 영역이다. 로터의 가속 및 감속은 100-1,200RPM/s의 범위에 있다. 로터의 가동시 가속될 것이며, 이를 위해 180°의 회전 후, 적어도 1g의 원심 가속도가 가해져야 하며, 이에 따라 하측으로 향한 개구들을 가진 반응조들로부터 떨어지는 유체 방울이 없게 된다. 깊은 웰(deep well)의 반응조를 갖는 마이크로티터 플레이트는 가능한 빠르게 가속될 수 있다. 하지만, 반응조로서 소형 웰(small well)을 가진 마이크로티터 플레이트들을 가속하려면 가속 때문에 한 반응조에서 주변 반응조로 유체가 넘쳐 오염을 일으킬 수 있다. 그렇게 넘치는 오염의 위험은 반응조들의 충전량(filling amount)뿐만 아니라 반응조들의 형태에도 의존한다. 500RPM/s에서 1,200RPM/s까지의 가속을 가지면, 넘침에 의한 오염이 일어나지 않는다는 것이 증명된 바 있다.
제3 실시예의 원심분리기(1)(도 11 및 12)는 반응조 유닛들을 원심분리할 뿐만 아니라 반응조 유닛들을 세척하고 세정하도록 설계된다. 이 원심분리기(1)는 제1 실시예의 것과 유사하게 구현된다. 원심분리기의 유사한 부품들은 제1 실시예의 것과 동일한 참조 번호로 표시된다.
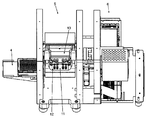
원심분리기(1)는 전면 플랫폼(4), 원심분리기 섹션(5) 및 구동 섹션(6)을 포함한다(도 12 및 13).
전면 플랫폼(4)은 전면 플랫폼(4)을 위아래로 이동시키는 승강 수단(lifting means)(48)에 연결되며, 전면 플랫폼(4)은 수평 위치를 유지한다. 전측벽(25)의 개구(32)는 제1 실시예보다 더 크며, 이에 따라 로터(8)의 플레이트 트레이(11)의 최상부와 최하부를 모두 커버한다. 전면 플랫폼(4)은 승강 수단(48)에 의하여 플레이트 트레이(11)의 저벽(12)의 최상부와 최하부 사이에서 움직일 수 있다.
상부 위치에서, 전면 플랫폼(4)은 플레이트 트레이(11)의 최상 위치에서 저벽(12)과 동일한 높이에 있어 마이크로티터 플레이트 또는 마이크로티터 플레이트 캐리어상의 마이크로티터 플레이트가 전면 플랫폼(4)으로부터 저벽(12)으로 수평적으로 슬라이드되거나 그 역으로 슬라이드될 수 있다. 전면 플랫폼(4)의 상부 위치에서, 로터에는 반지름 방향의 외측으로 향한 개구를 가지는 마이크로티터 플레이트가 로드되거나 언로드된다.
하부 위치에서, 전면 플랫폼(4)은 최하 위치에서의 플레이트 트레이(11)의 저벽(12)과 동일한 높이에 있어 마이크로티터 플레이트 또는 마이크로티터 플레이트 캐리어상의 마이크로티터 플레이트가 전면 플랫폼(4)으로부터 저벽(12)으로 슬라이드되거나 그 역으로 슬라이드될 수 있다. 이 위치에서, 플레이트 트레이(11)에는 마이크로티터 플레이트가 로드되거나 언로드되며, 마이크로티터 플레이트의 개구는 반지름 방향의 외측을 향하거나 샤프트(10) 방향을 향한다.
상부 위치에서, 반응조들의 세척이나 세정을 위해 로터에 마이크로티터 플레이트가 로드될 수 있고, 하부 위치에서, 반응조들의 내용물을 원심분리하기 위해 로터에 마이크로티터 플레이트가 로드될 수 있다. 따라서, 한편으로는 마이크로티터 용기들을 세척하거나 세정하고, 다른 한편으로는 마이크로티터 플레이트의 내용물을 원심분리하는 것에 모두 적용되기 때문에, 본 원심분리기는 하이브리드 원심분리기(hybrid-centrifuge)라 불린다.
원심분리기(1)는 2개의 로딩 메커니즘(33)을 포함하고, 각각은 유연성 장형 빔(34) 및 대응하는 유연성 장형 빔(34)을 가동하기 위한 스텝 모터(41)를 가진다. 나아가, 모터(47)는 로터(8)를 회전축(18) 중심으로 회전시키기 위한 샤프트(10)를 가동하기 위해 구비된다.
분배 바(dispensing bar)(49)(도 12)가 전측벽(25)의 개구(32)의 상부 섹션에 인접하게 구비된다. 분배 바(49)는 일렬로 배치된 복수의 분배 노즐(dispensing nozzle)(50)을 포함한다. 마이크로티터 플레이트의 행(column)의 각 반응조들에 대해, 대응하는 분배 노즐(50)이 분배 바(49)에 구비된다. 분배 노즐(50)을 통해 분배 유체가 자동적으로 반응조들 안으로 분배될 수 있도록, 분배 바(49)는 분배 유체(dispensing fluid), 특히 세정 유체(washing fluid)의 저장소(reservoir) 및 펌프(pump)에 연결된다. 분배 유체는 저장소 안에서 가열된 상태로 유지될 수 있다. 가열된 세정 용액의 분배는 세정 효율을 증진시킨다.
로딩 메커니즘(33)으로, 마이크로티터 플레이트의 각 행의 반응조들은, 유체를 대응하는 행의 반응조 안으로 분배하기 위한 분배 바(49) 아래에 개별적으로 배치될 수 있다. 원심분리기에 통합된 분배 바를 이용해 마이크로티터 플레이트의 원심분리에 의한 세척 및 세정 단계를 포함하는 몇몇 세정 단계들과 개별적인 원심분리 단계들 사이에서의 분배 단계를 매우 빠르게 반복하는 것이 가능해진다.
상기 설명된 실시예들은 마이크로티터 플레이트들을 세척, 세정 및/또는 원심분리하도록 구현된 원심분리기를 보여준다. 도 14 및 15는 겔 카드(gel card)를 원심분리하기 위한 원심분리기의 또 다른 실시예이다. 겔 카드는 서로 나란히 선형적으로 배치된 복수의 반응조들을 가지는 반응조 유닛이다. 그런 겔 카드는 깊은 웰(well)을 가진다.
제4 실시예에 따른 원심분리기(1)는 4개의 원심분리기 유닛을 수용하는 원심분리기 하우징(centrifuge housing)(51)을 포함하고, 각각은 로터(52) 및 각 원심분리기 유닛의 개별적 개폐를 위한 자동 리드(automatic lid)(53)를 포함한다. 각 로터(52)는 모터(미도시)에 의해 개별적으로 구동되고, 로터(52)들은 독립적으로 회전될 수 있다.
각각의 원심분리기 유닛은 겔 카드(55)들을 검출하기 위한 카메라(54)를 포함하고, 이는 대응되는 로터(52)에 셋팅된다. 카메라(54)는 광원(light source)을 포함한다.
사진을 찍기 위해, 로터의 회전이 정지되고, 반응조들 및 겔 카드 내의 내용물이 광학적으로 검출되고 분석된다. 원심분리는 광학 검출 및 광학 분석이 이루어진 후에 계속될 수 있고, 이러한 단계들이 계속해서 반복될 수 있다. 따라서, 원심분리기 유닛의 겔 카드를 언로드하는 일 없이 반응조들 내의 내용물의 원심분리 효과를 모니터하는 것이 가능하다.
바람직한 실시예에서, 카메라(54)의 광원은 스트로보스코프(stroboscopic) 광원이다. 그런 스트로보스코프 광원에 의한 플래시광의 생성은 로터와 겔카드의 회전과 각각 동기화되며, 이에 따라 플래시광이 정확히 겔 카드가 카메라(54)의 시야(field of vision)에 있을 때 생성된다. 도 14 및 15에 도시된 실시예에서, 카메라의 시야는 최하 위치에서 겔카드를 검출하기 위해 배치된다. 그런 스트로보스코프 광원을 이용함으로써 겔 카드를 검출하기 위한 카메라와 광원을, 겔 카드의 사진을 회전을 정지하지 않고 획득할 수 있도록, 기타 다른 회전 위치에 배치할 수 있게 된다.
투명 플라스틱 물질로 이루어진 겔 카드(55)는 종래 알려진 기술이다. 바람직하게, 겔 카드는 반응조의 일측면이 유색(colored)이고, 반응조의 타측면이 투명 물질로 이루어져 이용된다. 유색측(colored side)의 색상은 백색이나 밝은 회색과 같은 밝은 색상인 것이 바람직하다. 유색측은 유색 플라스틱 물질이나 겔카드의 일측에 가해진 유색 코팅으로 구현될 수 있다. 그런 겔 카드는 투명측에서 광학 스캔되고, 유색측은 유색 배경을 제공한다. 유색 배경은 콘트라스트를 향상시켜, 광원의 광학적 힘이 다소 약하더라도 신뢰성 있는 광학 검출이 가능해진다. 그런 겔 카드는, 바람직하게는 혈액 검사, 특히 혈액형 판정을 위해 이용된다. 혈액의 레드 응집반응(red agglutination)은 밝은, 특히 백색 또는 회색의 배경 앞에서 높은 콘트라스트를 갖고 검출될 수 있다. 유색측을 가지는 겔 카드는 독립된 발명의 개념을 형성한다.
제4 실시예는 겔 카드를 회전시키는 원심분리기 내의 카메라를 보여준다. 그런 카메라는 마이크로티터 플레이트를 원심분리하기 위하여 원심분리기 내에 구비될 수도 있다. 그런 원심분리기에서 카메라 및 대응 광원은 로터를 둘러싸는 하우징 내에 위치하고, 반응조의 개구가 로터의 샤프트 쪽을 향하면 반응조의 바닥 사진을 찍는 시야를 갖도록 배치된다.
상기 설명된 모든 실시예에서, 폐쇄되지 않은 개구를 가진 반응조를 갖는 반응조 유닛은 액체 샘플들이 반응조 내에서 안전하게 유지되도록 개구들이 상방을 향한 상태의 정상 위치(regular position)에서 원심분리기에 전달될 수 있는 게 보통이다. 이는 정상 위치에서 반응조를 처리하기 위한 처리 수단(handling means)을 보통 포함하는 자동 로봇에 원심분리기를 통합시키기 쉽게 만든다. 제4 실시예에서, 겔 카드들은 상부로부터 대응 로터의 용기 영역 안으로 로드될 수 있다. 제1, 2 및 3 실시예에서, 마이크로티터 플레이트는 전면 플랫폼으로 전달될 수 있다. 수평 회전축은 정상 위치에서 반응조 유닛을 전달하기 쉽게 만든다. 나아가, 상기 설명된 실시예들에 따른 원심분리기에서, 반응조 유닛은 항상 정확히 정의된 위치에 홀딩된다. 스윙하는 로터(swinging rotor)를 가지는 원심분리기의 경우처럼 제어되지 않는 자유도(degree of freedom)는 없다. 이렇게 정의된 위치는 카메라(위에서 설명된)나 피펫 수단(pipetting means)과 같은, 원심분리기 섹션 내의 또 다른 기능들을 통합시킬 수 있게 한다. 반응조의 사진이 자동적으로 찍혀야 한다면, 반응조들이 회전된다 하더라도 반응조들의 위치를 정확히 알아야 한다. 반응조 유닛이 원심분리기의 로터 내에 위치할 때 반응조들 안으로 액체를 분배하기 위해 분배 수단이 구비된다면 본 발명에 다른 원심분리기는 더 개조될 수 있다. 예를 들어, 제2 실시예는 덮개벽(24)의 꼭대기부(top portion)가 자동 리드(automatic lid)로 구현되도록 개조될 수 있고, 몇몇 분배 노즐을 포함하는 분배 바는 자동 리드 위에 위치된다. 이는 로터로부터 반응조를 제거하지 않고 반응조들 안으로 세정 유체를 분배할 수 있게 한다. 마이크로티터 플레이트를 원심분리하기 위한 원심분리기(1)는 플레이트 트레이가 최하 위치에 있을 때, 플레이트 트레이(11)와 샤프트 사이의 섹션에서 자동적으로 움직일 수 있는 안으로 집어넣을 수 있는 분배 바를 구비할 수 있다. 그럼 로터(8) 안에 위치한 반응조에 반응 용액을 자동 분배할 수 있게 되고, 이는 반응조의 접촉을 원심분리함으로써 다시 처리될 수 있다.
아래에서, 본 발명에 따른 원심분리기를 이용하는 몇몇 예시를 설명한다.
혈액 은행에서는 혈액형 판정의 처리량 향상이 강력히 요구된다. 보통 겔 카드 수단에 의한 자동 혈액형 판정이 수행된다. 그런 겔 카드는 쉽게 광학적으로 스캔되고 분석될 수 있다. 하지만, 그런 겔 카드에서 반응조의 개수는 한정적이고 반응조가 마이크로티터 플레이트의 경우처럼 2차원 어레이가 아니라 선형적으로 배치되기 때문이다.
제2 및 제3 실시예에 따른 원심분리기는 마이크로티터 플레이트의 수단에 의한 혈액형 판정에 이용될 수 있다. 혈액형 판정은 다음 일련의 단계에 의해 수행될 수 있다.
1. 분배기(dispenser) 수단에 의해 마이크로티터 플레이트의 반응조들 안으로 특정 양의 겔이 자동적으로 채워진다.
2. 마이크로티터 플레이트가 원심분리기(1)의 전면 플랫폼(4)에 놓인다. 로딩 메커니즘(33)의 수단에 의해 로터(8)의 플레이트 트레이(11) 안으로 마이크로티터 플레이트가 로드된다. 전측벽(25)의 개구(32)가 닫힌다.
3. 개구가 각각 샤프트 또는 회전축에 향하게 마이크로티터 플레이트가 로터 내에 배치된다. 겔에 기포(air bubble)가 없어지고 반응조 바닥에 매우 균일하게 정착되어(settle down) 각 반응조에서 동일한 충전 높이가 되게 하기 위하여, 로터(8)를 회전시킴으로써 마이크로티터 플레이트 내의 반응조의 내용물이 원심분리된다.
4. 마이크로티터 플레이트가 로딩 메커니즘(33)의 수단에 의해 로터로부터 언로드되고 전면 플랫폼(4)으로 이동한다.
5. 알고 있는 종류의 적혈구(RBCs)와 미지의 적혈구의 샘플 물질(sample material)과 대응하는 시약(reagent)이 겔필링(gel filling)을 가진 반응조(3)들 안으로 분배된다.
6. 마이크로티터 플레이트가 로딩 메커니즘(33) 수단에 의해 로터 안으로 자동적으로 로드되고, 개구(32)가 자동적으로 열렸다 닫힌다.
7. 마이크로티터 플레이트의 반응조의 내용물이 배양(incubate)되도록 원심분리기 섹션 내부 공간이 특정 기간동안 기설정된 온도로 조절된다. 배양 단계 동안, 2개의 다른 종류의 혈액 샘플이 응집되고, 만약 2개의 혈액 샘플이 동일한 종류라면 반응하지 않는다.
8. 마이크로티터 플레이트가 원심분리된다. 혈액 샘플이 응집되면, 겔의 표면 또는 상부 섹션 또는 반지름 방향의 내부 섹션에 잔존한다. 혈액 샘플들이 반응하지 않으면, 혈액은 겔 안으로 잠겨 겔의 하측 또는 반지름 방향의 외측 섹션에 도달한다.
9. 로딩 메커니즘(33) 수단에 의해 마이크로티터 플레이트가 로터로부터 전면 플랫폼으로 언로드되며, 개구(32)는 자동적으로 열린다.
10. 마이크로티터 플레이트가 광학 스캐너(optical scanner)에 놓인다. 광학 스캐너는 하부 및/또는 상부로부터의 시야에서 마이크로티터 플레이트를 스캔한다. 비반응 혈액 샘플은 반응조 바닥면에서 붉은 점(red spot)으로 검출된다. 겔의 상부는 맑게 보인다. 응집된 혈액 샘플들은 응집 RBCs가 겔의 상부에 흩어진 패턴으로 남아있을 것이기 때문에 다른 패턴을 보일 것이다. 하부로부터의 시야에 의한 광학 검출로 A, B 및 O의 혈액형이 신뢰성 있게 검출되고 구별될 수 있다는 것이 증명된 바 있다. 혈액 판정을 위한 마이크로티터 플레이트의 사용은 처리량을 상당히 향상시키고, 소형화 및 더욱 강력한 병렬화에 의하여 겔에 기초한 혈액형 판정의 비용을 감소시킨다.
이 프로세스는 제2 및 제3 실시예에 따른 원심분리기로 수행된다. 그런 원심분리기는 마이크로티터 플레이트를 별도의 스캐너로 이동시킬 필요가 없도록 카메라를 구비하는 것이 바람직하다.
또한, 세포분석은 비드 분석과 매우 유사한 방식으로 세정 단계를 요구한다. 세포들은 원심분리에 의하여 마이크로플레이트 표면에 고정될 수 있다. 따라서, 세포 분석의 일련의 단계에서 원심분리와 세정을 결합한 제3 실시예에 따른 원심분리기의 하이브리드 시스템이 유용하다. 세포 플레이트는 상부 위치와 하부 위치 사이에서 이동될 수 있는 전면 플랫폼 위에 놓일 수 있다. 하부 로딩 위치에서, 플레이트의 개구가 원심분리기의 축을 향하고, 플레이트 바닥으로 세포들이 스핀다운(spin down)하여 세포들이 거기에 부착될 수 있도록 플레이트가 위치하게, 플레이트가 원심분리기 안으로 로드된다. 이후(예를 들어, 약물 치료 이후)에 개구가 회전축의 반대측을 향하게 원심분리기의 상부 로딩 위치로 플레이트를 이동시킴으로써, 세포들이 동일한 장치 내에서 세정된다. 하이브리드 시스템은 하나의 장치에의 작업흐름의 서로 다른 단계를 결합하고, 로봇 시스템에서 공간을 절약하는 자동화에 무척 유용하다.
자성 비드는 반응조 내의 용액에 균일하게 분포될 수 있다. 자기력은 반응조의 상부 섹션보다 하부 섹션의 비드에 더욱 세다. 따라서, 비드를 수용하는 반응조를 먼저 원심분리하고(반지름 방향의 내측으로 향한 반응조 개구를 가진 원심분리 단계), 그 다음 원심분리기 내의 비드를 세정한다(반지름 방향의 외측으로 향한 반응조 개구를 가진 세정 단계). 이는 깊은 웰의 마이크로티터 플레이트를 이용할 때 특히 효과가 있고, 여기서 반응조는 10mm 또는 그 이상의 높이를 가진다. 이 방법으로, 자성 비드를 세정하기 위한 깊은 웰(well)과 함께 작고 가벼운 자석을 이용할 수 있다.
많은 수집량(collection volume)을 이용하는 이 과정은 혈액 은행 스크리닝에서의 바이러스 핵산의 민감성 검출이 다량으로 시작되기 때문에 매우 중요하다.
또한, 자성 비드(59)들을 이용하는 몇몇 실험은 비드를 홀딩하거나 수집하기 위해 예컨대 자성 로드(magnetic rod)(57)와 같은 자석을 포함한다. 그러한 실험 구조의 일례는 로드가 샘플 액체/시약/버퍼 등(60)에 절대 닿지 못하도록 자성 로드를 위한 보호 캐비티(protective cavity)(58)와 같은 것을 더 포함할 수 있다. 이에 의하여, 보호 캐비티의 돌출부(protrusion)가 샘플 액체/시약/버퍼 등의 내부로 놓여질 수 있고, 이와 함께 자성 로드는 액체와 접촉하지 않으면서 캐비티 안에 놓이게 된다. 캐비티를 통한 자기력의 작용 때문에, 자성 비드는 로드의 반대측에서 캐비티의 돌출부에 홀딩될 것이다.
보호 캐비티의 돌출부는 샘플 액체로 들어가기 적합한 형태로 이루어져야 하고, 적어도 캐비티의 벽을 통해 자기력에 의해 비드들을 수집하기 위하여 적어도 비드에 충분히 가까워야 한다. 가능한 보호 캐비티는, 예를 들어, 반응조(3) 또는 마이크로플레이트를 수용하는 비드의 네거티브 카피(negative copy)와 같은 것일 수 있다. 로드가 보호 캐비티에 단단히 커버될 수 있도록 보호 캐비티는 자성 로드의 형태를 보완한다. 보호 캐비티가 비드를 수용하는 플레이트/반응 용기 안으로 놓이고, 예컨대 자성 로드가 보호 캐비티의 용기 안으로 놓이면, 자성 비드는 보호 캐비티의 외측 하부에 수집될 것이다.
보호 캐비티와 적어도 하나의 자성 로드를 포함하는 이 유닛은 이동될 수 있고, 자성 비드는 보호 캐비티의 외표면에 달라붙는다.
이 방법은 결합 물질(bound material)과 함께 비드를 개별 용액을 수용하고 있는 다음 실험 단계를 위한 다른 플레이트로 이동시키는 데 이용된다. 하지만, 비드의 이동과 함께, 액체의 잔존량도 한 플레이트에서 다른 플레이트로 이동될 것이다. 다수의 이동 단계를 가진 실험의 경우, 원치 않는 이동 액체의 총량은 높은 비율로 올라간다. 이러한 문제를 해결하기 위해, 본 발명에 따른 원심분리기가 이용될 수 있다. 이를 위해, 반응조의 하측에 자성 비드를 홀딩하는 자성 로드와 함께 보호 캐비티는 비어 있는 새로운 플레이트로 이동되고, 본 발명에 따른 원심분리기에 놓여진다(반지름 방향의 내측으로 향한 반응조의 개구를 갖는 원심분리 단계).
적절한 원심분리 속도를 적용함으로써, 자기력에 의해 비드가 보호 캐비티의 하측에 달라붙은 상태에서, 잔존 액체(residual liquid)(61)가 비드로부터 제거된다. 채용된 자석에 따라 각각의 속도가 조절되어야 한다. 이 단계 이후, 세정 플레이트는 폐기될 수 있고, 건조된 비드와 함께 보호 캐비티가 다음 실험 단계에 요구되는 플레이트로 이동될 수 있다.
본 발명에 따른 원심분리기가 이용될 수 있는 또 다른 실험 구조는 로드 시스템(rod system)이 타겟 분자(target molecule)를 포획(capture)하는 데 이용될 때이다(도 18a 내지 18d).
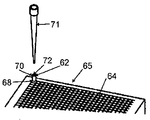
그래서 본 발명의 또 다른 특징은 시약을 운반하기 위해 이용되는 로드(rod)들이다. 이러한 로드는 수동 작업에 이용될 수도 있고, 그런 로드를 잡기 위한 그립퍼(gripper)를 갖는 로봇과 함께 이용될 수 있다.
로드 시스템은 자성 혹은 비자성(non-magnetic)일 수 있는 로드(62)들을 포함한다(도 18a). 로드는 몇몇 기술적 요구사항을 만족하는 방식으로 설계가 이루어져야 한다. 로드의 반응조 안에 놓이게 될 부분(63)의 직경은 반응조(64)의 직경에 맞춰져야 한다(도 18b). 이 로드는 단일 반응조나 96, 384 또는 그 이상의 용기를 갖는 마이크로티터 플레이트(65)에 모두 이용될 수 있다. 따라서, 상기 언급한 로드 부분의 직경은 용기 중 하나보다 작아야 하지만, 용기 내의 로드 주위에서 스태거링(staggering)을 피하기에 너무 작아서는 안 된다.
나아가 로드는 반응조 벽부에 접촉해서는 안 되는데, 이는 로드 상의 결합 항체(antibody)(66)나 항원(antigen)(67)을 제거하게 할 수 있기 때문이다. 따라서, 로드는 돌출부(protrusion)(68)를 포함하고, 돌출부(68)는 로드의 용기의 내에 위치한 부분(63) 위에 위치한다. 이는 로드가 용기 안으로 더 들어와 용기의 바닥 부분(벽 또는 바닥)에 닿는 것을 방지한다. 상기 돌출부(68)는 예컨대 링(rign)과 같은 형태일 수 있고, 단지 하나이거나 그보다 많은 소형 돌출부(들)일 수 있다.
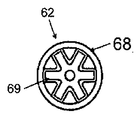
로드의 용기 내에 위치한 부분(63)은 용기에 끼워지는 형태로 어떠한 방식으로도 이루어질 수 있다. 예를 들어 원통이나 원뿔일 수 있다. 로드의 이 부분의 표면을 증가시키기 위해, 예를 들어, 십자가 모양이나 별 모양일 수 있다(도 18d). 로드의 표면을 증가시키기에 수직의 마루나 모서리(ridge or edge)(69)와 같은 다른 형태가 적절하기도 하다.
용기 내에 위치한 로드의 하부 섹션은 로드 표면의 시약 고정을 가능하게 한다. 이는 코팅(coating)이나 커플링(coupling)과 같은 표면 상호작용(surface interaction)의 수단으로 수행될 수 있다. 이와 달리, 로드는 자성 요소를 포함할 수 있고, 이에 따라 시약들이 로드의 표면상의 자성 비드를 통해 고정될 수 있다. 이 하부 섹션은 반응 섹션(reaction section)으로 불린다. 따라서, 로드는 항체나 항원과 같은 시약을 가진 로드의 코팅이나 커플링을 가능하게 하는 물질로 이루어진다.
이러한 종류의 실험을 위한 로드들은 예를 들어 자성 요소를 포함한다. 이러한 자성 로드는 예컨대 항체로 코팅된 비드를 포획하는 데 이용된다. 또한, 비자성 로드를 예컨대 항체로 직접 코팅하는 것도 가능하다.
로드를 항체(66) 또는 항원(67)으로 코팅시키기 위하여, 표면은 그에 따라 개조될 수 있고, 이는 당업자에 잘 알려진 사항이다.
로드를 용기 안에 놓은 뒤 용기 위에 위치하는 로드의 상단부(upper part)(70)는 (표준) 피펫팁(pipette tip)(71)을 가진 로드를 이동시킬 수 있게 설계되고(도 18c), 피펫 (암) 커플링 섹션에 스스로 연결될 수 있다. 바람직한 설계는 로드의 상단부에 피펫팁(71)이 몇 밀리미터, 예를 들어 1에서 12mm 정도 들어갈 수 있는 블라인드 홀(blind hole)(72)을 포함한다. 사용되는 팁에 따라(예를 들어 100㎕에서 1㎕), 팁은 블라인드 홀(72)에 상이한 깊이로 들어간다. 압력으로 팁(71)을 홀 안에 위치시킬 때, 팁의 샤프트는 팁이 로드의 홀 안에 달라붙는 것보다 피펫 자체에 더 세게 달라붙어야 한다. 그렇지 않으면 팁이 로드에 붙을 수 있다.
로드를 이동시키기 위하여, 홀(hole)은 폭이 줄어드는 블라인드 홀(blind hole)의 형상으로 이해되는 것이 바람직하다. 이에 의하여, 팁을 홀 안에 놓을 때, 공기 밀봉(airtight seal)이 형성될 것이다. 홀 안에 놓이게 되면, 피펫은 그의 평범한 사용법을 이용하여 공기를 흡입함으로써 홀 안에 진공을 형성할 수 있다. 진공은 피펫팁에 로드를 홀딩할 것이고 예컨대 다음 반응조로 이동될 수 있다. 로드를 릴리즈(release)시키기 위하여, 어떤 액체를 내뿜을 때 평범한 피펫 메커니즘에 의해 공기가 뿜어져 나온다. 진공을 감소시킴으로써, 로드는 피펫팁으로부터 릴리즈되고, 반응조에서 돌출부(62)가 저지하는 지점까지 예컨대 슬라이드할 수 있다.
이와 달리 로드는 보통의 그립 장치(gripping device)의 수단으로 그립될 수도 있다.
하지만, 보통의 그립 장치는 흔히 장치를 옆에서 그립한다. 이는 그립될 모든 단일 장치를 위한 그립 장치에 대한 공간적 필요성을 수반한다. 로드들을 마이크로티터 플레이트의 모든 단일 용기에 놓기 위하여, 로드가 모든 용기를 동시에 그립하는 것은 거의 실현되기 어렵다. 본 메커니즘에 따르면, 그립 장치로서 팁과 함께 있는 피펫을 이용함으로써, 피펫팁이 피펫 장치에 의해 홀딩되는 수만큼 반응웰(reaction wells)들에 로드들이 놓일 수 있다. 또한, 한 플레이트의 선택된 단일 용기는 로드 시스템과 함께 이용되고, 나머지는 미사용으로 남겨질 수 있다.
동일하거나 상이한 항체나 항원으로 코팅된 로드를 이용하여 하나의 플레이트에서 다수 샘플에 대한 빠른 테스트를 수행하기 위해, 용기들은 서로 다른 샘플 액체로 채워질 수 있다.
로드를 코팅하거나 코팅된 비드를 수집한 이후, 로드들은 대응 샘플 액체를 수용하는 반응조 안에 놓이게 된다.
로드를 한 반응조에서 다음으로 이동시킬 때(실험에 따라 많은 이동이 요구될 수 있다), 잔존 샘플 액체의 이동은 원하지 않는 것이다. 따라서, 로드는 비어 있는 반응조 안에 놓일 수 있고, 이는 본 발명에 따른 원심분리기 안에 놓일 수 있다. 반응조가 반지름 방향의 내측을 향하는 개구를 가진 원심분리 단계에 의하여, 이를 다음 반응조로 이동시키기 전에 원치 않는 잔존 액체가 쉽게 제거될 수 있다.
이에 의하여, 원치 않는, 이동된 잔존 액체량이 월등히 감소될 수 있고, 이는 개선된 반응 조건을 만든다.
보통의 그립 장치는 흔히 장치를 측면에서 그립(grip)한다. 이는 그립될 모든 단일 장치를 위한 그립 장치에 대한 공간적 필요성을 수반한다. 로드들을 마이크로티터 플레이트의 모든 단일 용기에 놓기 위하여, 로드가 모든 용기를 동시에 그립하는 것은 거의 실현되기 어렵다. 본 메커니즘에 따르면, 그립 장치로서 팁과 함께 있는 피펫을 이용함으로써, 피펫팁이 피펫 장치에 의해 홀딩되는 수만큼 반응웰(reaction wells)들에 로드들이 놓일 수 있다. 또한, 한 플레이트의 선택된 단일 용기는 로드 시스템과 함께 이용되고, 나머지는 미사용으로 남겨질 수 있다.
흔히 이용되는 피펫 로봇은 최대 96 표준 피펫팁을 휴대할 수 있다. 그 개수는 반응웰의 크기와 피펫 장치에 상단이 연결되는 피펫팁의 직경 때문에 제한된다. 96 팁보다 많은, 예를 들어 384 팁을 지닌 피펫암이 있지만, 이들은 특별한 팁을 채용하고 있고, 비싸다. 96보다 많은 개수에서 여기에 개시된 로드를 처리하기 위하여, 이러한 로드가 96 채널을 가진 표준 피펫 헤드와 평범한 표준 피펫팁으로 처리할 수 있게 설계돼야 하므로, 비싸고 특별한 팁들이 채용되거나, 또는 로드가 384개의 로드로 전체 384 용기 플레이트를 채우기 위하여 4번 움직일 필요가 있다. 하지만, 이런 단계들은 많은 시간을 필요로 하지 않고, 따라서, 실험 프로세스의 속도를 상당히 늦추지는 않는다. 로드들은 시차를 두는 방식으로 384 플레이트의 모든 제2 용기에 로드를 위치시키도록 이동될 수 있다. 더 많은 용기를 가진 플레이트를 위하여 384개 로드보다 더 많은 처리가 이루어질 수 있고, 용기 크기에 대한 로드 크기의 적용만을 요구한다.
여기 개시된 로드들은 보통의 액체 처리기(liquid handler)로 시약 캐리어 유닛을 제어 가능하게 그립하거나 릴리즈시킬 수 있다. 어떠한 지방 처리기도 이용될 수 있다. 시약 캐리어 유닛도 처리할 수 있도록 액체 처리기를 기계적으로 적용시킬 필요는 없다.
어떠한 종류의 액체를 피펫팅하도록 구현된 장치들이 당업자에 알려져 있다. 이러한 종류의 장치들은 액체 처리기로도 불린다. 가장 흔한 액체 처리기들은 피펫 또는 액체를 피펫팅하기 위한 로봇 암이다.
따라서, 로드와 피펫팁을 이용한 그들의 편리한 처리 방법은 많은 수의 로드를 빠르게 처리할 수 있게 하며, 특별한 팁이나 피펫 장치를 위한 부가적인 비용 없이 쉽게 자동화될 수 있다.
핵산의 증폭 반응(amplification reaction)은 일반적으로 고온을 요구한다(PCR과 같이). 그들은 마이크로티터 플레이트에서 고처리량으로 수행된다. 단일 반응량의 증발을 방지하기 위해, 마이크로티터 플레이트의 상부에서 포일을 고정하기 위해 플레이트 밀봉기(sealer)가 이용된다. 이는 비용이 많이 들고, 플레이트 밀봉기를 자동실험로봇 시스템에 통합시키기 어렵다. PCR의 초창기에는 반응을 커버하기 위해 포일(foil) 대신 광유(mineral oil)가 사용되었었다. 로봇은 광유를 쉽게 처리할 수 있지만 소량의 수용액(aqueous solution)과 소량의 광유는 고성능으로 마이크로티터 플레이트에서 2개의 분리된 상(오일이 위에 있는)을 형성하도록 분배되기 어려울 것이다. 원심분리 단계는 상을 분리시키기 위해 필요하고, 모든 반응에 대해 커버리지(coverage)가 성공적이고 어떤 수용액도 증발되지 않는 100% 확실성을 담보한다. 상술한 바와 같이 원심분리기는 로봇화된 업무 흐름에 쉽게 통합된다.
1‥‥‥원심분리기
2‥‥‥마이크로티터 플레이트
3‥‥‥반응조 4‥‥‥전면 플랫폼
5‥‥‥원심분리기 섹션 6‥‥‥구동 섹션
7‥‥‥림 8‥‥‥로터
9‥‥‥하우징 10‥‥‥샤프트
11‥‥‥플레이트 트레이 12‥‥‥저벽
13‥‥‥U-레일 14‥‥‥베이스 섕크
15‥‥‥사이드 섕크 16‥‥‥사이드 섕크
17‥‥‥중심 보어 18‥‥‥회전축
19‥‥‥스톱퍼 20‥‥‥마이크로티터 플레이트 캐리어
21‥‥‥림 22‥‥‥연결 요소
23‥‥‥하우징 24‥‥‥덮개벽
25‥‥‥전측벽 26‥‥‥후측벽
27‥‥‥하부 하프셸 28‥‥‥상부 하프셸
29‥‥‥플랜지 30‥‥‥드레인
31‥‥‥지지부 32‥‥‥개구
33‥‥‥로딩 메커니즘 34‥‥‥유연성 장형 빔
35‥‥‥내벽 36‥‥‥자유단
37‥‥‥상부 스트랜드 38‥‥‥하부 스트랜드
39‥‥‥휠 40‥‥‥휠
41‥‥‥스텝퍼 모터 42‥‥‥자성 요소
43‥‥‥레그 44‥‥‥플랜지
45‥‥‥평형추 46‥‥‥레그
47‥‥‥모터 48‥‥‥승강 수단
49‥‥‥분배 바 50‥‥‥분배 노즐
51‥‥‥원심분리기 하우징 52‥‥‥로터
53‥‥‥리드 54‥‥‥카메라
55‥‥‥겔 카드 56‥‥‥로터 공간
57‥‥‥자성 로드 58‥‥‥보호 캐비티
59‥‥‥자성 비드 60‥‥‥샘플 액체/시약/버퍼 등
61‥‥‥캐비티/비드로부터 제거된 잔존 액체
62‥‥‥로드 63‥‥‥로드의 하단부
64‥‥‥반응조 65‥‥‥마이크로티터 플레이트
66‥‥‥항체 67‥‥‥항원
68‥‥‥돌출부 69‥‥‥마루/모서리
70‥‥‥로드의 상단부 71‥‥‥피펫팁 도시(schematic depiction)
72‥‥‥블라인드 홀
3‥‥‥반응조 4‥‥‥전면 플랫폼
5‥‥‥원심분리기 섹션 6‥‥‥구동 섹션
7‥‥‥림 8‥‥‥로터
9‥‥‥하우징 10‥‥‥샤프트
11‥‥‥플레이트 트레이 12‥‥‥저벽
13‥‥‥U-레일 14‥‥‥베이스 섕크
15‥‥‥사이드 섕크 16‥‥‥사이드 섕크
17‥‥‥중심 보어 18‥‥‥회전축
19‥‥‥스톱퍼 20‥‥‥마이크로티터 플레이트 캐리어
21‥‥‥림 22‥‥‥연결 요소
23‥‥‥하우징 24‥‥‥덮개벽
25‥‥‥전측벽 26‥‥‥후측벽
27‥‥‥하부 하프셸 28‥‥‥상부 하프셸
29‥‥‥플랜지 30‥‥‥드레인
31‥‥‥지지부 32‥‥‥개구
33‥‥‥로딩 메커니즘 34‥‥‥유연성 장형 빔
35‥‥‥내벽 36‥‥‥자유단
37‥‥‥상부 스트랜드 38‥‥‥하부 스트랜드
39‥‥‥휠 40‥‥‥휠
41‥‥‥스텝퍼 모터 42‥‥‥자성 요소
43‥‥‥레그 44‥‥‥플랜지
45‥‥‥평형추 46‥‥‥레그
47‥‥‥모터 48‥‥‥승강 수단
49‥‥‥분배 바 50‥‥‥분배 노즐
51‥‥‥원심분리기 하우징 52‥‥‥로터
53‥‥‥리드 54‥‥‥카메라
55‥‥‥겔 카드 56‥‥‥로터 공간
57‥‥‥자성 로드 58‥‥‥보호 캐비티
59‥‥‥자성 비드 60‥‥‥샘플 액체/시약/버퍼 등
61‥‥‥캐비티/비드로부터 제거된 잔존 액체
62‥‥‥로드 63‥‥‥로드의 하단부
64‥‥‥반응조 65‥‥‥마이크로티터 플레이트
66‥‥‥항체 67‥‥‥항원
68‥‥‥돌출부 69‥‥‥마루/모서리
70‥‥‥로드의 상단부 71‥‥‥피펫팁 도시(schematic depiction)
72‥‥‥블라인드 홀
Claims (18)
- 반응조 유닛 세정을 위한 원심분리기로,
외측으로 향한 개구(들)로 적어도 하나의 반응조 유닛(2)을 홀딩하는 로터(8);
회전축(18)을 중심으로 상기 로터(8)를 회전시키는 모터; 및
실질적으로 원통형 내표면을 갖고, 상기 반응조 유닛(2)으로부터 배출된 유체를 방출시키기 위해 드레인(30)이 구비되는 하우징(23);을 포함하며,
상기 로터(8)의 회전으로 상기 내표면에서 상기 배출된 유체를 상기 드레인(30)으로 이동시키는 바람이 생성되도록, 상기 내표면과 상기 로터(8) 사이에 갭(gap)이 구비되고, 유체를 배출시키기 위한 상기 드레인(30)에 흡입 펌프가 연결되는 원심분리기. - 반응조 유닛 세정을 위한 원심분리기로, 특히 제1항에 있어서,
외측으로 향한 개구(들)로 적어도 하나의 반응조 유닛(2)을 홀딩하는 로터(8);
회전축(18)을 중심으로 상기 로터(8)를 회전시키는 모터; 및
실질적으로 원통형 내표면을 가지며, 상기 반응조 유닛(2)으로부터 배출된 유체를 방출시키기 위해 드레인(30)을 구비한 하우징(23);을 포함하고,
상기 로터(8)의 회전으로 상기 원통형의 내표면에서 상기 배출된 유체를 상기 드레인(30)으로 이동시키는 바람이 생성되도록, 상기 원통형 내표면과 상기 로터(8) 사이에 1mm보다 크지 않은 갭(gap)이 구비되는 원심분리기. - 반응조 유닛 세정을 위한 원심분리기로, 특히 제1항 또는 제2항에 있어서,
외측으로 향한 개구(들)로 적어도 하나의 반응조 유닛(2)을 홀딩하는 로터(8);
회전축(18)을 중심으로 상기 로터(8)를 회전시키는 모터;
하우징(23); 및
상기 배출된 유체가 상기 내표면에서 응축되도록 상기 하우징의 내표면을 냉각시키는 냉각 장치;를 포함하는 원심분리기. - 반응조 유닛 세정을 위한 원심분리기로, 특히 제1항 내지 제3항 중 어느 한 항에 있어서,
외측 및/또는 내측으로 향한 개구(들)로 적어도 하나의 반응조 유닛(2)을 홀딩하는 로터(8);
회전축(18)을 중심으로 상기 로터(8)를 회전시키는 모터;를 포함하고, 상기 로터가 회전하는 섹션은 원심분리기 섹션(5)을 형성하며,
반응조 유닛(2)을 상기 원심분리기(1)에 로드하거나 언로드하기 위한 로딩 매커니즘(33);을 포함하고, 상기 로딩 매커니즘은 반응조 유닛(2)의 신장과 회수를 위한 유연성 장형 빔(34) 및 상기 빔(34)을 신장시키거나 회수하기 위한 구동 수단(40,41)을 포함하고, 상기 유연성 장형 빔(34)은 신장 상태에서 상기 원심분리기 섹션(5)을 통해 연장되고, 회수 상태에서 상기 원심분리기 섹션(5)으로부터 제거되어, 상기 로터(8)가 자유롭게 회전될 수 있는 원심분리기. - 제4항에 있어서,
반응조 유닛(2) 또는 반응조 유닛 캐리어(20)와의 연결을 위하여 상기 빔(34)의 자유단에 자성 커플링(42)이 구비되는 원심분리기. - 제4항 또는 제5항에 있어서,
상기 원심분리기(1)는 반응조 유닛(2)을 상기 원심분리기(1)에 로드하거나 언로드하기 위한 개구(32)를 가진 하우징(23)을 포함하고, 상기 로딩 매커니즘(33)의 상기 구동 수단(40,41)은 상기 개구(32)에 대하여 상기 로터(8)의 반대측에 구비되고, 신장 상태에서 상기 빔(34)은 상기 로터(8)와 상기 개구(32)를 통해 연장되는 원심분리기. - 제4항 내지 제6항 중 어느 한 항에 있어서,
상기 빔(34)은 구부러진 메탈 시트로 이루어진 원심분리기. - 반응조 유닛 세정을 위한 원심분리기로, 특히 제1항 내지 제7항 중 어느 한 항에 있어서,
외측으로 향한 개구(들)로 적어도 하나의 반응조 유닛(2)을 홀딩하는 로터(8);
회전축(18)을 중심으로 상기 로터(8)를 회전시키는 모터; 및
반응조 유닛(2)의 반응조(3)에 자기장을 가하기 위하여 상기 로터 내에 배치되는 자성 소자;를 포함하는 원심분리기. - 제8항에 있어서,
상기 자성 소자는 반응조 유닛을 위한, 분리 가능한 캐리어(20)의 일부인 원심분리기. - 상기 청구항들 중 어느 한 항에 있어서,
상기 하우징 및/또는 상기 로터 내에 수용된 기체의 온도를 조절하는 온도 조절 수단을 포함하는 원심분리기. - 상기 청구항들 중 어느 한 항에 있어서,
반응조 유닛을 스캐닝하기 위해 구비된 카메라를 구비하는 원심분리기. - 상기 청구항들 중 어느 한 항에 있어서,
지정된 사용에 따라 상기 반응조 유닛 원심분리기를 지지하도록 구현된 상기 반응조 유닛 원심분리기의 플랫폼은 상기 로터(8)의 상기 회전축(18)에 평행한 방향성을 가지는 원심분리기. - 상기 청구항들 중 어느 한 항에 있어서,
상기 원심분리기(1)는 반응조 유닛들을 로드하거나 언로드하기 위한 2개의 개구를 포함하고, 이들은 상기 회전축(18)에 대해 정반대측에 구비된 원심분리기. - 반응조 유닛의 원심분리방법으로, 특히 제1항 내지 제13항 중 어느 한 항에 따른 원심분리기가 이용되고,
반응조 유닛(2)이 로터(8)에 놓이고, 반응조 유닛은 개구를 가지는 적어도 하나의 반응조(3)를 포함하며, 상기 반응조 유닛(2)은 상기 반응조(3)를 비우기 위하여 상기 반응조의 개구를 반지름 방향의 외측을 향하도록 놓고, 상기 로터(8)는 상기 반응조 유닛(2)을 요동시키기 위해 앞뒤로 이동되는 방법. - 반응조 유닛(2)으로 마이크로티터 플레이트를 사용하는 혈액형 판정과 같은 겔 분리 수단에 의한 평행시험용 방법으로, 특히 제1항 내지 제13항 중 어느 한 항에 따른 원심분리기가 이용되고,
- 샘플 물질과 시약을 상기 반응조(3)들 안에, 상기 반응조들에 수용된 겔필링(gel filling)에 분배하는 단계;
- 상기 마이크로티터 플레이트를 원심분리하는 단계; 및
- 상기 반응조들을 광검출하는 단계;를 포함하는 방법. - 자성 비드(59)의 수단으로 분석을 수행하는 방법으로,
- 보호 캐비티(58)를 샘플 액체(60) 내에 자성 비드(59)를 수용하는 반응조(3) 내에 위치시키는 단계;
- 상기 보호 캐비티(58)의 반대측에서 자력으로 상기 자성 비드(59)를 달라붙게 하는 자성 로드(57)를 상기 보호 캐비티(58) 내에 위치시키는 단계;
- 달라붙은 자성 비드(59)를 가진 상기 보호 캐비티(58)와 함께 상기 자성 로드(57)를 제거하는 단계;
- 상기 자성 로드(57) 및 달라붙은 자성 비드(59)를 가진 상기 보호 캐비티(58)를 비어 있는 반응조(3)에 위치시키는 단계;
- 잔존하는 샘플 액체(61)을 제거하기 위하여, 상기 빈 반응조(3) 내에서 달라붙은 자성 비드(59)를 가진 상기 보호 캐비티(58)와 상기 자성 로드(57)를 원심분리하는 단계; 및
- 달라붙은 자성 비드(59)를 가진 상기 보호 캐비티(58)와 상기 자성 로드(57)를 샘플 액체, 시약 또는 버퍼(60)를 수용한 다음 반응조(3)로 이동시키는 단계;를 포함하는 방법. - 로드 시스템(rod system)의 수단으로 분석을 수행하는 방법으로,
- 로드(62)를 항체(66) 또는 항원(67)으로 코팅하는 단계;
- 피펫 팁(71)의 수단으로 상기 로드(62)를 샘플 액체을 수용하는 반응조(64) 내에 위치시키는 단계;
- 잔존 샘플 액체을 제거하기 위하여, 상기 로드(62) 및 상기 반응조(64)를 원심분리하는 단계; 및
- 상기 로드(62)를 샘플 액체, 시약 또는 버퍼를 포함하는 다음 반응조(64)로 이동시키는 단계;를 포함하는 방법. - 제17항에 있어서,
상기 로드는 피펫 팁(71)의 수단으로 이동되는 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020217018923A KR102335824B1 (ko) | 2013-08-06 | 2014-08-06 | 원심분리기 및 반응조 유닛의 원심분리방법 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP13179437.2 | 2013-08-05 | ||
| EP13179437.2A EP2835178B1 (en) | 2013-08-06 | 2013-08-06 | Centrifuge and method for centrifuging a reaction vessel unit |
| PCT/EP2014/066947 WO2015018878A2 (en) | 2013-08-06 | 2014-08-06 | Centrifuge and method for centrifuging a reaction vessel unit |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020217018923A Division KR102335824B1 (ko) | 2013-08-06 | 2014-08-06 | 원심분리기 및 반응조 유닛의 원심분리방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20160041999A true KR20160041999A (ko) | 2016-04-18 |
Family
ID=48948278
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020167005920A KR20160041999A (ko) | 2013-08-06 | 2014-08-06 | 원심분리기 및 반응조 유닛의 원심분리방법 |
| KR1020217018923A KR102335824B1 (ko) | 2013-08-06 | 2014-08-06 | 원심분리기 및 반응조 유닛의 원심분리방법 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020217018923A KR102335824B1 (ko) | 2013-08-06 | 2014-08-06 | 원심분리기 및 반응조 유닛의 원심분리방법 |
Country Status (11)
| Country | Link |
|---|---|
| US (9) | US10338063B2 (ko) |
| EP (2) | EP2835178B1 (ko) |
| JP (2) | JP2016534865A (ko) |
| KR (2) | KR20160041999A (ko) |
| CN (1) | CN105517711B (ko) |
| BR (1) | BR112016001985B1 (ko) |
| CA (1) | CA2918921C (ko) |
| DE (13) | DE202014011542U1 (ko) |
| ES (1) | ES2636926T3 (ko) |
| RU (1) | RU2672746C2 (ko) |
| WO (1) | WO2015018878A2 (ko) |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2835178B1 (en) | 2013-08-06 | 2017-04-12 | Yantai AusBio Laboratories Co., Ltd. | Centrifuge and method for centrifuging a reaction vessel unit |
| EP3075454B1 (de) * | 2015-04-02 | 2018-05-09 | Sigma Laborzentrifugen GmbH | Laborzentrifuge und verfahren zum betrieb derselben |
| DE102016101163A1 (de) * | 2016-01-22 | 2017-07-27 | Bluecatbio Gmbh | Zentrifuge |
| EP3229028B1 (en) | 2016-04-08 | 2021-11-10 | I-Sens, Inc. | Circular type cartridge enabling centrifugation and modular automatic analyzer using the same |
| CN106623205A (zh) * | 2017-02-16 | 2017-05-10 | 吴建国 | 微孔反应板快速洗板机及洗板方法 |
| US10562032B2 (en) * | 2017-05-26 | 2020-02-18 | Aushon Biosystems, Inc. | Systems and methods for automatic plate washing |
| DE102017113583A1 (de) * | 2017-06-20 | 2018-12-20 | Bluecatbio Gmbh | Zentrifuge |
| EP3502689B1 (en) * | 2017-12-19 | 2022-08-17 | Bio-Rad Europe GmbH | Method and apparatus for testing a biological sample |
| CN108034566B (zh) * | 2018-01-04 | 2023-05-23 | 广州承葛复兴医药科技有限公司 | 离心洗涤设备及离心洗涤的方法 |
| CN110407911A (zh) * | 2018-04-28 | 2019-11-05 | 南京金斯瑞生物科技有限公司 | 磁珠纯化系统 |
| CN108906144B (zh) * | 2018-05-14 | 2020-10-09 | 清华大学 | 一种用于多种样品同步高通量加样系统 |
| CN108680421B (zh) * | 2018-07-19 | 2024-03-15 | 嘉兴医脉赛科技有限公司 | 结构紧凑、稳定性高的磁珠纯化仪 |
| CN109047154A (zh) * | 2018-08-24 | 2018-12-21 | 佛山市迎熙金属制品有限公司 | 一种蓄热球清洗机 |
| EP3938114B1 (en) | 2019-03-15 | 2024-01-10 | Siemens Healthcare Diagnostics Inc. | Method and apparatus for magnetic bead manipulation |
| DE102019131509A1 (de) * | 2019-11-21 | 2021-05-27 | Gea Mechanical Equipment Gmbh | Düsenüberwachungsvorrichtung für eine Düsenzentrifuge, Düsenzentrifuge, und Verfahren zum Überwachen von Düsen einer Düsenzentrifuge |
| CN110694804A (zh) * | 2019-11-29 | 2020-01-17 | 上海百傲科技股份有限公司 | 试剂离心系统 |
| WO2021168157A1 (en) * | 2020-02-18 | 2021-08-26 | General Automation Lab Technologies Inc. | Method of transferring material from microfabricated device |
| CN112222129B (zh) * | 2020-09-16 | 2022-04-05 | 宜昌市中心人民医院(三峡大学第一临床医学院、三峡大学附属中心人民医院) | 试管板清洗机 |
| EP4347137A1 (de) | 2021-05-31 | 2024-04-10 | Cytena Gmbh | Zentrifuge zum rotieren eines probenträgers |
| US20230072202A1 (en) * | 2021-09-07 | 2023-03-09 | Grenova, Inc. | Laboratory well plate washing device and associated method |
| DE102021124023A1 (de) | 2021-09-16 | 2023-03-16 | Bluecatbio Gmbh | Zentrifuge und Verfahren zum Reinigen einer Zentrifuge |
| FR3127418A1 (fr) * | 2021-09-27 | 2023-03-31 | Seylab | Dispositif de lavage |
| DE102022102701A1 (de) | 2022-02-04 | 2023-08-10 | Bluecatbio Gmbh | Ableitvorrichtung für eine Reaktionsgefäßeinheit, Zentrifuge und Verfahren zum Reinigen einer Reaktionsgefäßeinheit |
| DE102022102705A1 (de) | 2022-02-04 | 2023-08-10 | BlueCat Solutions GmbH | Auffangvorrichtung für eine Reaktionsgefäßeinheit und Reaktionsgefäßeinheit |
| LU502092B1 (de) | 2022-05-14 | 2023-11-14 | Cytena Gmbh | Zentrifuge zum Rotieren eines Probenträgers |
| CN115771667B (zh) * | 2023-02-10 | 2023-06-27 | 武汉明德璟泓医疗科技有限公司 | 一种肿瘤生物标志物检测试剂盒及其使用方法 |
Family Cites Families (61)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2561186A (en) * | 1943-02-04 | 1951-07-17 | Gen Electric | Washing machine |
| US3116626A (en) * | 1961-12-15 | 1964-01-07 | Gen Electric | Laundry machine for washing and centrifuging with slip clutch |
| JPS5242445Y2 (ko) * | 1974-09-28 | 1977-09-27 | ||
| JPS5143967A (ja) | 1974-10-12 | 1976-04-15 | Citizen Watch Co Ltd | Zendenshishikitokei |
| US3951334A (en) * | 1975-07-07 | 1976-04-20 | E. I. Du Pont De Nemours And Company | Method and apparatus for automatically positioning centrifuge tubes |
| DE2810765C2 (de) | 1978-03-13 | 1984-11-22 | Dr. Molter GmbH, 6901 Bammental | Laborzentrifuge |
| JPS5531427A (en) * | 1978-08-24 | 1980-03-05 | Sankyo Co Ltd | Automatic centrifugal separator |
| JPS5735854U (ko) * | 1980-08-09 | 1982-02-25 | ||
| JPS5735854A (en) | 1980-08-12 | 1982-02-26 | Mitsubishi Paper Mills Ltd | Silver complex salt material for diffusion transfer |
| US4576200A (en) | 1985-03-26 | 1986-03-18 | Applied Power Inc. | Hydraulic pressure reducing control valve |
| US4931385A (en) | 1985-06-24 | 1990-06-05 | Hygeia Sciences, Incorporated | Enzyme immunoassays and immunologic reagents |
| FI884502A (fi) * | 1988-09-30 | 1990-03-31 | Labsystems Oy | Tvaettningsanordning. |
| WO1993010455A1 (en) * | 1991-11-21 | 1993-05-27 | Cirrus Diagnostics, Inc. | Improved centrifuge vessel for automated solid-phase immunoassay |
| CN2147902Y (zh) * | 1992-05-13 | 1993-12-01 | 沈阳化工学院机械厂 | 安瓿离心机 |
| CN2197666Y (zh) * | 1994-04-29 | 1995-05-17 | 北京市海淀区天石医疗用品制作所 | 自动洗板器 |
| US5419871A (en) * | 1994-04-29 | 1995-05-30 | Muszak; Martin F. | Analyzer elevator assembly |
| US5779907A (en) * | 1996-12-06 | 1998-07-14 | Systems Research Laboratories, Inc. | Magnetic microplate separator |
| FI982645A (fi) * | 1997-12-15 | 1999-06-16 | Wallac Oy | Menetelmä ja laite näytelevyjen käsittelemiseksi |
| FI102906B1 (fi) * | 1998-02-23 | 1999-03-15 | Bio Nobile Oy | Menetelmä ja väline aineen siirtämiseksi |
| DE19817426B4 (de) * | 1998-04-18 | 2004-06-09 | J. Schmalz Gmbh | Greifersystem, insbesondere Vakuumgreifersystem |
| US6062239A (en) | 1998-06-30 | 2000-05-16 | Semitool, Inc. | Cross flow centrifugal processor |
| US6150182A (en) * | 1998-11-30 | 2000-11-21 | Cassaday; Michael M. | Method for separation of components in a biochemical reaction utilizing a combination of magnetic and centrifugal processes |
| US7390459B2 (en) * | 1999-12-13 | 2008-06-24 | Illumina, Inc. | Oligonucleotide synthesizer |
| US6649419B1 (en) * | 2000-11-28 | 2003-11-18 | Large Scale Proteomics Corp. | Method and apparatus for protein manipulation |
| EP1270078B1 (en) * | 2001-06-22 | 2004-09-15 | Jouan Italia S.R.L. | Apparatus and method for automatic loading and unloading of centrifuge buckets |
| ITCZ20020002A1 (it) * | 2002-04-11 | 2003-10-13 | Parco Scient E Tecnologico Del | Dispositivo e metodo per il rilevamento simultaneo di differenti anticorpi e antigeni in campioni clinici, alimentari ed ambientali |
| CN2565547Y (zh) * | 2002-05-15 | 2003-08-13 | 王剑湖 | 带消声冷却装置的离心机 |
| US20040096983A1 (en) | 2002-11-14 | 2004-05-20 | Jacobs Merrit N. | Wash process for a sample being analyzed |
| SE0203413D0 (sv) * | 2002-11-19 | 2002-11-19 | Alphahelix Ab | Device and rotor means therefor |
| US6929596B2 (en) * | 2003-02-07 | 2005-08-16 | Fleetguard, Inc. | Centrifuge with separate hero turbine |
| US20040208790A1 (en) | 2003-04-21 | 2004-10-21 | Taigen Bioscience Corporation | Rotating and tapping apparatus |
| JP2005081281A (ja) * | 2003-09-09 | 2005-03-31 | Hitachi Koki Co Ltd | 自動遠心機 |
| DE102004012025C5 (de) | 2004-03-10 | 2012-04-05 | Eppendorf Ag | Laborzentrifuge mit Ausschwingbehältern |
| US7595470B1 (en) * | 2005-02-18 | 2009-09-29 | Sizer Charles E | Method and apparatus for heating and aseptic dispensing of sterile product |
| US20060198759A1 (en) * | 2005-03-03 | 2006-09-07 | Shneider Alexander M | Universal test-tube rack for chemical and biochemical sample preparation |
| JP2007178355A (ja) | 2005-12-28 | 2007-07-12 | Nippon Support System Kk | 試薬廃棄装置 |
| US7803101B2 (en) * | 2007-01-30 | 2010-09-28 | Ortho-Clinical Diagnostics, Inc. | Random access multi-disc centrifuge |
| JP4911434B2 (ja) * | 2007-06-21 | 2012-04-04 | 日立工機株式会社 | 細胞洗浄遠心機およびそれに用いられる細胞洗浄ロータ |
| DE102008007889A1 (de) | 2007-06-28 | 2009-01-02 | Flexlift-Hubgeräte GmbH | Schubstange |
| JP2009079940A (ja) * | 2007-09-25 | 2009-04-16 | Tosoh Corp | ピペットチップの搬送装置 |
| US20090181359A1 (en) | 2007-10-25 | 2009-07-16 | Lou Sheng C | Method of performing ultra-sensitive immunoassays |
| US8222048B2 (en) | 2007-11-05 | 2012-07-17 | Abbott Laboratories | Automated analyzer for clinical laboratory |
| JP4808701B2 (ja) * | 2007-12-27 | 2011-11-02 | パナソニック株式会社 | 分析装置 |
| JP2009264927A (ja) * | 2008-04-25 | 2009-11-12 | Micronics Kk | マイクロプレート処理装置 |
| US20090274348A1 (en) * | 2008-04-30 | 2009-11-05 | Ortho-Clinical Diagnostics, Inc. | Immunodiagnostic test apparatus having at least one imager to provide agglutination evaluations during centrifugration cycle |
| DE102008042971A1 (de) * | 2008-10-20 | 2010-04-22 | Agilent Technologies Inc., Santa Clara | Zentrifuge mit Magneteinrichtung |
| JP5077292B2 (ja) * | 2009-05-29 | 2012-11-21 | 日立工機株式会社 | 遠心分離機 |
| JP2011013042A (ja) * | 2009-06-30 | 2011-01-20 | Beckman Coulter Inc | 自動分析装置および測定方法 |
| EP2743704A3 (en) | 2010-07-23 | 2014-06-25 | Beckman Coulter, Inc. | System or method of including analytical units |
| JP4812897B1 (ja) * | 2010-12-22 | 2011-11-09 | ミクロ技研株式会社 | 基板処理装置及び基板処理方法 |
| CN102175855A (zh) * | 2011-01-13 | 2011-09-07 | 邱重任 | 一种全自动360度甩干的卧式酶标洗板机 |
| IT1404237B1 (it) * | 2011-01-13 | 2013-11-15 | Giacalone | Centrifuga da laboratorio, con sistema di caricamento e scaricamento continuo dei contenitori, con rotore in rotazione |
| US9039992B2 (en) * | 2011-06-06 | 2015-05-26 | Abbott Laboratories | Apparatus for closed tube sampling and open tube sampling for automated clinical analyzers |
| WO2013003692A1 (en) * | 2011-06-30 | 2013-01-03 | Highres Biosolutions | Automated centrifuge with side and top access |
| US9084994B2 (en) | 2011-09-09 | 2015-07-21 | Orochem Technologies, Inc. | Apparatus and method for parallel collection and analysis of the proteome and complex compositions |
| CN102417902A (zh) * | 2011-09-16 | 2012-04-18 | 广西出入境检验检疫局检验检疫技术中心 | 磁珠-微孔板法提取核酸试剂盒及其提取核酸方法 |
| KR20140091032A (ko) * | 2011-11-07 | 2014-07-18 | 베크만 컬터, 인코포레이티드 | 검체 수송 시스템의 자기 감쇠 |
| US9385020B2 (en) * | 2011-12-19 | 2016-07-05 | SCREEN Holdings Co., Ltd. | Substrate holding and rotating device, substrate treatment apparatus including the device, and substrate treatment method |
| DE102012201717A1 (de) | 2012-02-06 | 2013-08-08 | AusBio Laboratories Co, Ltd. | Probenträger-Zentrifuge |
| DE202012001679U1 (de) | 2012-02-20 | 2012-04-04 | Sigma Laborzentrifugen Gmbh | Anlaufgerät für den Kompressor einer Kühlzentrifuge |
| EP2835178B1 (en) | 2013-08-06 | 2017-04-12 | Yantai AusBio Laboratories Co., Ltd. | Centrifuge and method for centrifuging a reaction vessel unit |
-
2013
- 2013-08-06 EP EP13179437.2A patent/EP2835178B1/en active Active
-
2014
- 2014-08-06 ES ES14753044.8T patent/ES2636926T3/es active Active
- 2014-08-06 DE DE202014011542.7U patent/DE202014011542U1/de active Active
- 2014-08-06 DE DE202014011070.0U patent/DE202014011070U1/de active Active
- 2014-08-06 JP JP2016532683A patent/JP2016534865A/ja active Pending
- 2014-08-06 CN CN201480044908.0A patent/CN105517711B/zh active Active
- 2014-08-06 DE DE202014011073.5U patent/DE202014011073U1/de not_active Expired - Lifetime
- 2014-08-06 DE DE202014011521.4U patent/DE202014011521U1/de active Active
- 2014-08-06 BR BR112016001985-7A patent/BR112016001985B1/pt active IP Right Grant
- 2014-08-06 DE DE202014011612.1U patent/DE202014011612U1/de active Active
- 2014-08-06 DE DE202014010544.8U patent/DE202014010544U1/de active Active
- 2014-08-06 DE DE202014011074.3U patent/DE202014011074U1/de active Active
- 2014-08-06 RU RU2016101935A patent/RU2672746C2/ru active
- 2014-08-06 KR KR1020167005920A patent/KR20160041999A/ko active IP Right Grant
- 2014-08-06 DE DE202014011543.5U patent/DE202014011543U1/de active Active
- 2014-08-06 US US14/910,681 patent/US10338063B2/en active Active
- 2014-08-06 DE DE202014011072.7U patent/DE202014011072U1/de active Active
- 2014-08-06 DE DE202014011614.8U patent/DE202014011614U1/de active Active
- 2014-08-06 DE DE202014011071.9U patent/DE202014011071U1/de not_active Expired - Lifetime
- 2014-08-06 KR KR1020217018923A patent/KR102335824B1/ko active IP Right Grant
- 2014-08-06 EP EP14753044.8A patent/EP3030353B1/en active Active
- 2014-08-06 DE DE202014011068.9U patent/DE202014011068U1/de not_active Expired - Lifetime
- 2014-08-06 CA CA2918921A patent/CA2918921C/en active Active
- 2014-08-06 WO PCT/EP2014/066947 patent/WO2015018878A2/en active Application Filing
- 2014-08-06 DE DE202014011611.3U patent/DE202014011611U1/de active Active
-
2018
- 2018-09-03 JP JP2018164143A patent/JP6726242B2/ja active Active
-
2019
- 2019-01-09 US US16/243,644 patent/US11885798B2/en active Active
- 2019-01-17 US US16/250,092 patent/US10928387B2/en active Active
- 2019-01-18 US US16/251,267 patent/US20190227059A1/en not_active Abandoned
- 2019-01-23 US US16/255,052 patent/US20190154675A1/en not_active Abandoned
- 2019-01-24 US US16/256,021 patent/US20190170740A1/en not_active Abandoned
-
2021
- 2021-01-19 US US17/151,999 patent/US11885799B2/en active Active
-
2023
- 2023-08-16 US US18/450,818 patent/US20230393127A1/en active Pending
-
2024
- 2024-01-10 US US18/408,845 patent/US20240142443A1/en active Pending
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11885799B2 (en) | Centrifuge including a magnetic element and method for centrifuging a reaction vessel unit | |
| EP2500076B1 (en) | Structure and method for handling magnetic particles in biological assays | |
| US20240133875A1 (en) | Centrifuge and method for centrifuging a reaction vessel unit |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AMND | Amendment | ||
| A201 | Request for examination | ||
| AMND | Amendment | ||
| E902 | Notification of reason for refusal | ||
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| AMND | Amendment | ||
| X701 | Decision to grant (after re-examination) |