JP7588932B2 - モータ制御方法 - Google Patents
モータ制御方法 Download PDFInfo
- Publication number
- JP7588932B2 JP7588932B2 JP2020152099A JP2020152099A JP7588932B2 JP 7588932 B2 JP7588932 B2 JP 7588932B2 JP 2020152099 A JP2020152099 A JP 2020152099A JP 2020152099 A JP2020152099 A JP 2020152099A JP 7588932 B2 JP7588932 B2 JP 7588932B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- torque
- driver
- rotation speed
- command torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 22
- 230000035939 shock Effects 0.000 claims description 44
- 230000008859 change Effects 0.000 claims description 18
- 101150070189 CIN3 gene Proteins 0.000 description 13
- 238000010586 diagram Methods 0.000 description 11
- 238000004891 communication Methods 0.000 description 10
- 230000004043 responsiveness Effects 0.000 description 10
- 230000004044 response Effects 0.000 description 9
- 230000001629 suppression Effects 0.000 description 9
- 230000008569 process Effects 0.000 description 6
- 230000001133 acceleration Effects 0.000 description 4
- 238000009499 grossing Methods 0.000 description 4
- 230000003111 delayed effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000036962 time dependent Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images






Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
Description
図1は、本発明の一実施形態に係るモータ制御方法が実施される制御システム1の構成を示すブロック図である。
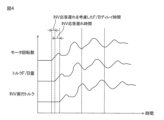
図2Aおよび図2Bは、モータトルク制御の流れを示す図である。図3は、アクセル開度、ドライバ要求トルクおよび指示トルクの時間変化の一例を示す図である。図4は、モータ回転数、F/Bトルクおよび実行トルクの時間変化の一例を示す図である。
S7:ブレーキオフから第2時間内である。
S8:アクセル開度の変化が第2値以下である。
S9:アクセル開度が減少していない。
S10:ブレーキオフである。
S11:指示トルクが第3値以上である。
以上のように、EV-ECU3では、自ら取得したドライバ操作の情報と、INV4から受信したモータ状態パラメータとから、ドライバ操作によるドライバの要求に応じたドライバ要求トルクが求められる。そして、ドライバ要求トルクがモータトルクの目標とされて、その目標に応じた指示トルクが設定される。INV4では、指示トルクに応じた交流電力が駆動モータ2に供給されるように、高電圧回路23の回路動作が制御される。そのため、ドライバ操作に対して駆動モータ2から出力されるモータトルク(実行トルク)が急峻に立ち上がる。その結果、ドライバ操作に対して良好な応答性で車両が加速する。
以上、本発明の一実施形態について説明したが、本発明は、他の形態で実施することもできる。
3:EV-ECU(制御ユニット)
4:INV(インバータ)
11:マイコン
21:マイコン
24:インバータ回路
Claims (1)
- 走行用の動力を発生するモータと、指示トルクを設定する制御ユニットと、前記制御ユニットと双方向に通信可能に接続され、前記指示トルクに応じた回路動作により交流電力を前記モータに供給するインバータ回路を備えるインバータとを搭載した車両におけるモータ制御方法であって、
前記インバータは、前記モータの状態を計測して、前記モータの状態を表すモータ状態パラメータを前記制御ユニットに送信し、
前記制御ユニットは、ドライバによる前記車両の加減速のためのドライバ操作の情報を取得して、当該ドライバ操作の情報および前記インバータから受信した前記モータ状態パラメータから、ドライバの要求に応じたドライバ要求トルクを求め、前記ドライバ要求トルクを前記モータが発生するモータトルクの目標として、その目標に応じた前記指示トルクを設定し、前記モータトルクを前記目標に収束させるフィードバック制御のために、前記指示トルクが、前記指示トルクが前記目標に到達する際に発生するショックを前記フィードバック制御で取り切れる最大のトルク値以上になったことに応じて、現在のモータ回転数とドライブシャフト回転数をモータ回転数に換算した回転数との偏差に応じた前記指示トルクを設定し、
前記偏差に応じた前記指示トルクは、前記モータトルクの時間変化がモータ回転数の時間変化と逆位相となるように設定される、モータ制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020152099A JP7588932B2 (ja) | 2020-09-10 | 2020-09-10 | モータ制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020152099A JP7588932B2 (ja) | 2020-09-10 | 2020-09-10 | モータ制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022046176A JP2022046176A (ja) | 2022-03-23 |
| JP7588932B2 true JP7588932B2 (ja) | 2024-11-25 |
Family
ID=80779698
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020152099A Active JP7588932B2 (ja) | 2020-09-10 | 2020-09-10 | モータ制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7588932B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240044128A (ko) | 2022-09-28 | 2024-04-04 | 현대자동차주식회사 | 모터 구동 장치 및 이의 제어 방법 |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005102492A (ja) | 2003-09-05 | 2005-04-14 | Nissan Motor Co Ltd | 駆動力制御装置 |
| JP2011195093A (ja) | 2010-03-23 | 2011-10-06 | Honda Motor Co Ltd | 車両用駆動装置の制御装置 |
| JP2012175729A (ja) | 2011-02-17 | 2012-09-10 | Toyota Motor Corp | 電気自動車 |
| JP2013255409A (ja) | 2012-06-05 | 2013-12-19 | Hyundai Motor Co Ltd | トルクコンバータ未適用車両の振動低減アルゴリズム |
| JP2014128088A (ja) | 2012-12-26 | 2014-07-07 | Mitsubishi Motors Corp | 電動車両の駆動系制振制御装置 |
| WO2015059784A1 (ja) | 2013-10-23 | 2015-04-30 | 三菱電機株式会社 | モータ制御装置およびモータ制御方法 |
| JP2016096657A (ja) | 2014-11-14 | 2016-05-26 | トヨタ自動車株式会社 | 電動モーターによって駆動する車両、および、その車両の制御方法 |
| JP2017192248A (ja) | 2016-04-15 | 2017-10-19 | 日産自動車株式会社 | 電動車両の制御方法、及び、電動車両の制御装置 |
| JP2017195672A (ja) | 2016-04-19 | 2017-10-26 | 三菱電機株式会社 | 回転電機の制御装置 |
| JP2017221056A (ja) | 2016-06-09 | 2017-12-14 | 日産自動車株式会社 | 電動車両の制御方法、及び、制御装置 |
| JP2018067997A (ja) | 2016-10-18 | 2018-04-26 | 三菱自動車工業株式会社 | 電動車の走行制御装置 |
| JP2018191433A (ja) | 2017-05-08 | 2018-11-29 | 三菱電機株式会社 | 回転電機の制御装置 |
-
2020
- 2020-09-10 JP JP2020152099A patent/JP7588932B2/ja active Active
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005102492A (ja) | 2003-09-05 | 2005-04-14 | Nissan Motor Co Ltd | 駆動力制御装置 |
| JP2011195093A (ja) | 2010-03-23 | 2011-10-06 | Honda Motor Co Ltd | 車両用駆動装置の制御装置 |
| JP2012175729A (ja) | 2011-02-17 | 2012-09-10 | Toyota Motor Corp | 電気自動車 |
| JP2013255409A (ja) | 2012-06-05 | 2013-12-19 | Hyundai Motor Co Ltd | トルクコンバータ未適用車両の振動低減アルゴリズム |
| JP2014128088A (ja) | 2012-12-26 | 2014-07-07 | Mitsubishi Motors Corp | 電動車両の駆動系制振制御装置 |
| WO2015059784A1 (ja) | 2013-10-23 | 2015-04-30 | 三菱電機株式会社 | モータ制御装置およびモータ制御方法 |
| JP2016096657A (ja) | 2014-11-14 | 2016-05-26 | トヨタ自動車株式会社 | 電動モーターによって駆動する車両、および、その車両の制御方法 |
| JP2017192248A (ja) | 2016-04-15 | 2017-10-19 | 日産自動車株式会社 | 電動車両の制御方法、及び、電動車両の制御装置 |
| JP2017195672A (ja) | 2016-04-19 | 2017-10-26 | 三菱電機株式会社 | 回転電機の制御装置 |
| JP2017221056A (ja) | 2016-06-09 | 2017-12-14 | 日産自動車株式会社 | 電動車両の制御方法、及び、制御装置 |
| JP2018067997A (ja) | 2016-10-18 | 2018-04-26 | 三菱自動車工業株式会社 | 電動車の走行制御装置 |
| JP2018191433A (ja) | 2017-05-08 | 2018-11-29 | 三菱電機株式会社 | 回転電機の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022046176A (ja) | 2022-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CA3030812C (en) | Torque control method and torque control device | |
| JP5477030B2 (ja) | 電動車両の制御装置 | |
| JP2020127281A (ja) | 電動車両の制御装置 | |
| JP6122958B2 (ja) | 発電制御装置及び発電制御方法 | |
| JP6814830B2 (ja) | 制御システム、車両システム、および制御方法 | |
| EP1654138A1 (en) | Vehicle slip control system and method | |
| KR101755467B1 (ko) | 전기 자동차의 진동 저감 제어 장치 및 방법 | |
| JP7426250B2 (ja) | 車両制御装置 | |
| JP6711315B2 (ja) | 制御装置及び車載システム | |
| JP7588932B2 (ja) | モータ制御方法 | |
| JP3214285B2 (ja) | シリーズハイブリッド車における発電制御方法及び装置 | |
| CN114590240A (zh) | 混合动力车辆发动机输出扭矩控制方法、介质、装置及车辆 | |
| JP7401021B2 (ja) | ハイブリッド車両 | |
| WO2024053413A1 (ja) | モータ制御装置、及びモータ制御プログラム | |
| JP2021114822A (ja) | 車両 | |
| JP6259312B2 (ja) | 昇圧コンバータの制御装置及び昇圧コンバータの制御方法 | |
| JP5953783B2 (ja) | 電動車両のモータトルク制御方法 | |
| JP6332298B2 (ja) | 車両 | |
| JP7706487B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2025069823A (ja) | 車両用制御装置 | |
| JP7356400B2 (ja) | 車両用制御装置 | |
| JP2024036127A (ja) | モータ制御装置、及びモータ制御プログラム | |
| JP7625946B2 (ja) | 電動機制御方法及び電動機制御システム | |
| WO2024053412A1 (ja) | モータ制御装置、及びモータ制御プログラム | |
| JP5733140B2 (ja) | 電動車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230802 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240131 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240405 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240723 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240918 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241112 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7588932 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |