JP7367652B2 - 車両用プレビュー制振制御装置及び方法 - Google Patents
車両用プレビュー制振制御装置及び方法 Download PDFInfo
- Publication number
- JP7367652B2 JP7367652B2 JP2020170064A JP2020170064A JP7367652B2 JP 7367652 B2 JP7367652 B2 JP 7367652B2 JP 2020170064 A JP2020170064 A JP 2020170064A JP 2020170064 A JP2020170064 A JP 2020170064A JP 7367652 B2 JP7367652 B2 JP 7367652B2
- Authority
- JP
- Japan
- Prior art keywords
- road surface
- preview
- surface displacement
- vehicle
- damping control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000013016 damping Methods 0.000 title claims description 199
- 238000000034 method Methods 0.000 title claims description 21
- 238000006073 displacement reaction Methods 0.000 claims description 515
- 238000001514 detection method Methods 0.000 claims description 33
- 238000000605 extraction Methods 0.000 claims description 26
- 238000004891 communication Methods 0.000 claims description 21
- 239000000284 extract Substances 0.000 claims description 6
- 238000005192 partition Methods 0.000 claims 4
- 239000000725 suspension Substances 0.000 description 32
- 230000001133 acceleration Effects 0.000 description 26
- 230000000295 complement effect Effects 0.000 description 12
- 238000012986 modification Methods 0.000 description 8
- 230000004048 modification Effects 0.000 description 8
- 238000012545 processing Methods 0.000 description 8
- 239000006096 absorbing agent Substances 0.000 description 7
- 230000035939 shock Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 5
- 238000012935 Averaging Methods 0.000 description 3
- 238000012952 Resampling Methods 0.000 description 3
- 238000005070 sampling Methods 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 238000001914 filtration Methods 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 239000003381 stabilizer Substances 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
- B60G17/0165—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input to an external condition, e.g. rough road surface, side wind
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
- B60G17/0161—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input mainly during straight-line motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/018—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/019—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the type of sensor or the arrangement thereof
- B60G17/01908—Acceleration or inclination sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/06—Characteristics of dampers, e.g. mechanical dampers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2202/00—Indexing codes relating to the type of spring, damper or actuator
- B60G2202/40—Type of actuator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/05—Attitude
- B60G2400/051—Angle
- B60G2400/0514—Wheel angle detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/10—Acceleration; Deceleration
- B60G2400/102—Acceleration; Deceleration vertical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/25—Stroke; Height; Displacement
- B60G2400/252—Stroke; Height; Displacement vertical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/80—Exterior conditions
- B60G2400/82—Ground surface
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2401/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60G2401/16—GPS track data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2500/00—Indexing codes relating to the regulated action or device
- B60G2500/10—Damping action or damper
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/18—Automatic control means
- B60G2600/182—Active control means
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Vehicle Body Suspensions (AREA)
Description
カメラ、レーダーセンサなどのセンサによれば、車両の進行方向を横切る比較的広い範囲について車両の前方の路面情報を取得することができる。車両の前方の路面情報はレーザーセンサによっても取得することができ、ばね下の加速度センサのような車両の上下方向の運動状態量を検出するセンサによれば、車輪の位置における路面情報としてばね下の上下変位やその微分値を取得することができる。
〔課題を解決するための手段及び発明の効果〕
プレビュー参照データベース(45)を記憶する記憶装置(44)と、記憶装置を制御する第二の制御ユニット(管理サーバ42)と、を備えたプレビュー参照データベース制御装置(104)と、
を備え、
第一の制御ユニット(30)は、路面変位関連情報検出装置により検出された路面変位関連情報と該路面変位関連情報が検出された位置を特定可能な位置情報とを紐づけて第二の制御ユニット(42)へ送信するよう構成され、
第二の制御ユニット(42)は、車両又は他車から送信される検出された路面変位関連情報に基づいて路面の上下変位に関連する路面変位関連値(z1)を演算し、該路面変位関連値とそれに対応する位置情報とが紐づけられたデータのセットをプレビュー参照データベース(45)の一部として記憶装置(44)に記憶するよう構成され、
更に、第一の制御ユニット(30)は、プレビュー参照データベースの路面変位関連値及び位置情報を使用して車両のばね上の振動を低減するプレビュー制振制御を行うよう構成された、
車両用プレビュー制振制御装置(100)(本発明の基本の構成)が提供される。
更に、所定の隣接領域について、仮定された路面変位関連値の低周波成分が抽出処理され、抽出処理後の仮定された路面変位関連値と所定の隣接領域の位置を特定可能な位置情報とが紐づけられた仮定のデータのセットが、プレビュー参照データベースの一部として記憶装置に記憶される。よって、所定の隣接領域については、抽出処理後の仮定された路面変位関連値と所定の隣接領域の位置を特定可能な位置情報とが紐づけられた仮定のデータのセットをプレビュー参照データベースの一部として記憶装置に記憶することができる。
一般に、路面変位関連値の周波数が高いほど、路面の平坦性が低く、互いに隣接する路面部位の路面変位関連値の間の相違量が大きい可能性が高くなる。換言すれば、路面変位関連値の周波数が高いほど、路面変位関連値が同一であると仮定することができる路面の範囲が狭くなる。しかし、路面変位関連値の低周波成分は路面の比較的広い範囲に亘り同一である。
上記の第一の構成によれば、仮定された路面変位関連値の低周波成分が抽出処理される。よって、仮定された路面変位関連値の低周波成分が抽出処理されない場合に比して、路面の平坦性が低い状況においても、所定の隣接領域について仮定されたばね下変位が、その領域の実際のばね下変位と大きく相違する虞を低減することができる。従って、仮定されたばね下変位と実際のばね下変位と大きく相違することに起因して不適切な制御力にてプレビュー制振制御が行われる虞を低減することができる。
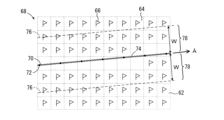
第一及び第二の制御ユニットの少なくとも一方は、路面変位関連情報検出装置により路面変位関連情報が検出された地点に対し車両の進行方向を横切る方向に位置する所定の隣接領域の路面変位関連値が、地点の路面変位関連値と同一であると仮定するよう構成され、
車両(V1)は、ばね上とばね下との間に作用する制御力を発生するよう構成された制御力発生装置(アクティブアクチュエータ17)を有し、
第一の制御ユニット(30)は、車輪(11)が通過すると予測される車輪通過予測位置を決定し、プレビュー参照データベースのうち車輪通過予測位置の路面変位関連値又は仮定された路面変位関連値を通信により取得し、取得した路面変位関連値又は仮定された路面変位関連値に基づいて、車輪が車輪通過予測位置を通過する際のばね上の振動を低減するための目標プレビュー制振制御力(Fct)を演算し、車輪が車輪通過予測位置を通過する際に制御力発生装置により発生される制御力が目標プレビュー制振制御力になるように制御力発生装置を制御するよう構成され、
更に、第一の制御ユニット(30)は、仮定された路面変位関連値を通信により取得したときには、仮定された路面変位関連値の低周波成分を抽出処理し、抽出処理後の仮定された路面変位関連値に基づいて、車輪(11)が車輪通過予測位置を通過する際のばね上の振動を低減するための目標プレビュー制振制御力(Fct)を演算するよう構成される(第二の構成)。
上記の第二の構成によれば、車輪が通過すると予測される車輪通過予測位置が決定され、プレビュー参照データベースのうち車輪通過予測位置の路面変位関連値又は仮定された路面変位関連値が通信により取得される。取得された路面変位関連値又は仮定された路面変位関連値に基づいて、車輪が車輪通過予測位置を通過する際のばね上の振動を低減するための目標プレビュー制振制御力が演算される。更に、車輪が車輪通過予測位置を通過する際に制御力発生装置により発生される制御力が目標プレビュー制振制御力になるように制御力発生装置が制御される。
よって、プレビュー参照データベースのうち車輪通過予測位置の路面変位関連値が、仮定された路面変位関連値である場合にも、その仮定された路面変位関連値に基づいて目標プレビュー制振制御力を演算し、目標プレビュー制振制御力に基づいてプレビュー制振制御を行うことができる。
更に、上記の制御方法によれば、所定の隣接領域について、仮定された路面変位関連値の低周波成分が抽出処理され、抽出処理後の仮定された路面変位関連値と所定の隣接領域の位置を特定可能な位置情報とが紐づけられた仮定のデータのセットが使用される。よって、仮定された路面変位関連値の低周波成分が抽出処理されない場合に比して、路面の平坦性が低い状況においても、所定の隣接領域について仮定されたばね下変位が、その領域の実際のばね下変位と大きく相違する虞を低減することができる。従って、仮定されたばね下変位と実際のばね下変位と大きく相違することに起因して不適切な制御力にてプレビュー制振制御が行われる虞を低減することができる。
<構成>
第一の実施形態においては、プレビュー制振制御装置100は、図1に示すように、車両V1に搭載された車載装置102及び車外に設置されたプレビュー参照データベース制御装置104を含んでいる。
次に、車載装置102のECU30が実行するプレビュー制振制御の概要について説明する。
m2ddz2=C(dz1-dz2)+K(z1-z2)-Fc・・・(1)
Fc=Cdz1+Kz1・・・(2)
Fc=α(Cdz1+Kz1)・・・(3)
m2ddz2=C(dz1-dz2)+K(z1-z2)-α(Cdz1+Kz1)・・・(4)

Fct=β1×dz1+β2×z1・・・(6)
Fct=β2×z1・・・(7)
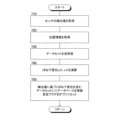
第一の実施形態においては、図5のフローチャートに示されたデータベースの作成ルーチンが所定の経過時間毎に実行されることにより、データベースが作成される。なお、ステップ510~530はECU30のCPUにより実行され、ステップ530~580は管理サーバ42のCPUにより実行される。更に、ステップ540~580がばね下変位z1fl及びz1frについて実行されてもよく、ばね下変位z1flについてステップ540~580が実行され、その後ばね下変位z1frについてステップ540~580が実行されてもよい。
第一の実施形態においては、図6のフローチャートに示された制振制御ルーチンがECU30のCPUによって所定の経過時間毎に実行されることにより、プレビュー制振制御が実行される。なお、プレビュー制振制御は、例えば左前輪、右前輪、左後輪及び右後輪の順に各車輪の位置について実行されてよい。
Fcti=Gpv(β1×dz1ai+β2×z1ai)・・・(8)
路面変位関連情報検出装置により検出された路面変位関連情報と該路面変位関連情報が検出された位置を特定可能な位置情報とを紐づけて第二の制御ユニットへ送信するステップAと、
車両又は他車から送信される路面変位関連情報に基づいて路面の上下変位に関連する路面変位関連値を演算するステップBと、
演算された路面変位関連値とそれに対応する位置情報とが紐づけられたデータのセットをデータベースの一部として記憶装置に記憶するステップCと、
データベースの路面変位関連情報及び位置情報を使用してプレビュー制振制御を行うステップDと、
データのセットを記憶装置に記憶するステップ及びプレビュー制振制御を行うステップの少なくとも一方において、路面変位関連情報検出装置により路面変位関連情報が検出された地点に対し車両の進行方向を横切る方向に位置する所定の隣接領域の路面変位関連値が、前記地点の路面変位関連値と同一であると仮定するステップEと、
を含んでいる。
<第二の実施形態のデータベース作成ルーチン>
第二の実施形態においては、データベース作成は、図7のフローチャートに示されたデータベース作成ルーチンが所定の経過時間毎に実行されることにより行われる。ステップ710~730は第一の実施形態のステップ510~530と同様にECU30のCPUにより実行され、ステップ730~750は第一の実施形態のステップ530~550と同様に管理サーバ42のCPUにより実行される。
第二の実施形態においては、図8のフローチャートに示された制振制御ルーチンがECU30のCPUによって所定の経過時間毎に実行されることにより、プレビュー制振制御が実行される。なお、本実施形態のプレビュー制振制御も、例えば左前輪、右前輪、左後輪及び右後輪の順に各車輪の位置について実行されてよい。ステップ810~830は第一の実施形態のステップ610~630と同様に実行され、ステップ855及び875はそれぞれ第一の実施形態のステップ660及び670と同様に実行される。更に、ステップ880及び890はそれぞれ第一の実施形態のステップ680及び690と同様に実行される。
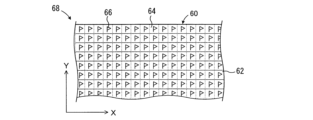
上述の第一の実施形態においては、記憶装置44に記憶されているばね下変位が、初期値又は仮定されたばね下変位であるか否かを示す識別標識として、仮定フラグ66が使用されている。本変形例においては、仮定フラグ66に代えて、「車輪11が各路面区画64を通過した回数PN」が使用される。回数PNが0であることは、車輪11が通過していないことを意味し、回数PNが1以上であることは、当該路面区画について検出値に基づくばね下変位z1が既に記憶装置44に記憶されていることを意味する。よって、回数PNによれば、仮定フラグ66のオンからオフへの切り替えが不要になる。
本変形例は、第一の実施形態の変形例である。本変形例のフローチャートは図示されていないが、データベース作成ルーチン及びプレビュー制振制御ルーチンは、ステップ560を除き、それぞれ図5及び図6のフローチャートに示されたルーチンと同一である。
Fcti=Gpv×β2×z1ai・・・(9)
Claims (12)
- 車両の走行中に車輪の位置及び前記車輪の前方の位置の少なくとも一方の路面の上下変位に関連する路面変位関連情報を検出する路面変位関連情報検出装置と、前記路面変位関連情報検出装置を制御する第一の制御ユニットと、を備えた車載制御装置と、
プレビュー参照データベースを記憶する記憶装置と、前記記憶装置を制御する第二の制御ユニットと、を備えたプレビュー参照データベース制御装置と、
を備え、
前記第一の制御ユニットは、前記路面変位関連情報検出装置により検出された路面変位関連情報と該路面変位関連情報が検出された位置を特定可能な位置情報とを紐づけて前記第二の制御ユニットへ送信するよう構成され、
前記第二の制御ユニットは、前記車両又は他車から送信される検出された路面変位関連情報に基づいて路面の上下変位に関連する路面変位関連値を演算し、該路面変位関連値とそれに対応する位置情報とが紐づけられたデータのセットをプレビュー参照データベースの一部として前記記憶装置に記憶するよう構成され、
更に、前記第一の制御ユニットは、前記プレビュー参照データベースの前記路面変位関連値及び前記位置情報を使用して前記車両のばね上の振動を低減するプレビュー制振制御を行うよう構成された、
車両用プレビュー制振制御装置において、
前記第一及び第二の制御ユニットの少なくとも一方は、前記路面変位関連情報検出装置により路面変位関連情報が検出された地点に対し前記車両の進行方向を横切る方向に位置する所定の隣接領域の路面変位関連値が、前記地点の路面変位関連値と同一であると仮定するよう構成され、
前記第二の制御ユニットは、前記所定の隣接領域について、仮定された路面変位関連値の低周波成分を抽出処理し、抽出処理後の仮定された路面変位関連値と前記所定の隣接領域の位置を特定可能な位置情報とが紐づけられた仮定のデータのセットを、前記プレビュー参照データベースの一部として前記記憶装置に記憶するよう構成された、
車両用プレビュー制振制御装置。 - 請求項1に記載の車両用プレビュー制振制御装置において、前記第二の制御ユニットは、仮定のデータのセットを前記プレビュー参照データベースの一部として前記記憶装置に記憶する場合には、路面変位関連値が仮定された路面変位関連値であることを示す識別情報と共に前記仮定のデータのセットをプレビュー参照データベースの一部として前記記憶装置に記憶するよう構成された、車両用プレビュー制振制御装置。
- 請求項1又は2に記載の車両用プレビュー制振制御装置において、前記第二の制御ユニットは、前記所定の隣接領域の位置について前記車両又は他車が走行する際に検出された路面変位関連情報に基づいて演算された路面変位関連値と位置情報とが紐づけられたデータのセットが前記記憶装置に既に記憶されていると判定したときには、前記仮定のデータのセットを前記記憶装置に記憶しないよう構成された、車両用プレビュー制振制御装置。
- 請求項1乃至3の何れか1項に記載の車両用プレビュー制振制御装置において、前記第二の制御ユニットは、前記抽出処理により抽出する成分の周波数が低いほど、前記所定の隣接領域の前記車両の進行方向を横切る方向の大きさを大きくするよう構成された、車両用プレビュー制振制御装置。
- 請求項1乃至4の何れか1項に記載の車両用プレビュー制振制御装置において、
前記車両は、前記ばね上とばね下との間に作用する制御力を発生するよう構成された制御力発生装置を有し、
前記第一の制御ユニットは、前記車輪が通過すると予測される車輪通過予測位置を決定し、前記プレビュー参照データベースのうち前記車輪通過予測位置の路面変位関連値又は仮定された路面変位関連値を通信により取得し、取得した路面変位関連値又は仮定された路面変位関連値に基づいて、前記車輪が前記車輪通過予測位置を通過する際の前記ばね上の振動を低減するための目標プレビュー制振制御力を演算し、前記車輪が前記車輪通過予測位置を通過する際に前記制御力発生装置により発生される制御力が前記目標プレビュー制振制御力になるように前記制御力発生装置を制御するよう構成された、
車両用プレビュー制振制御装置。 - 請求項1乃至5の何れか1項に記載の車両用プレビュー制振制御装置において、前記第二の制御ユニットは、前記プレビュー参照データベースにおける各道路の路面が複数の路面区画に予め区分された路面区画情報を記憶しており、演算した路面変位関連値に対応する位置情報として、前記路面区画を特定可能な位置情報を前記記憶装置に記憶するよう構成された、車両用プレビュー制振制御装置。
- 車両の走行中に車輪の位置及び前記車輪の前方の位置の少なくとも一方の路面の上下変位に関連する路面変位関連情報を検出する路面変位関連情報検出装置と、前記路面変位関連情報検出装置を制御する第一の制御ユニットと、を備えた車載制御装置と、
プレビュー参照データベースを記憶する記憶装置と、前記記憶装置を制御する第二の制御ユニットと、を備えたプレビュー参照データベース制御装置と、
を備え、
前記第一の制御ユニットは、前記路面変位関連情報検出装置により検出された路面変位関連情報と該路面変位関連情報が検出された位置を特定可能な位置情報とを紐づけて前記第二の制御ユニットへ送信するよう構成され、
前記第二の制御ユニットは、前記車両又は他車から送信される検出された路面変位関連情報に基づいて路面の上下変位に関連する路面変位関連値を演算し、該路面変位関連値とそれに対応する位置情報とが紐づけられたデータのセットをプレビュー参照データベースの一部として前記記憶装置に記憶するよう構成され、
更に、前記第一の制御ユニットは、前記プレビュー参照データベースの前記路面変位関連値及び前記位置情報を使用して前記車両のばね上の振動を低減するプレビュー制振制御を行うよう構成された、
車両用プレビュー制振制御装置において、
前記第一及び第二の制御ユニットの少なくとも一方は、前記路面変位関連情報検出装置により路面変位関連情報が検出された地点に対し前記車両の進行方向を横切る方向に位置する所定の隣接領域の路面変位関連値が、前記地点の路面変位関連値と同一であると仮定するよう構成され、
前記車両は、前記ばね上とばね下との間に作用する制御力を発生するよう構成された制御力発生装置を有し、
前記第一の制御ユニットは、前記車輪が通過すると予測される車輪通過予測位置を決定し、前記プレビュー参照データベースのうち前記車輪通過予測位置の路面変位関連値又は仮定された路面変位関連値を通信により取得し、取得した路面変位関連値又は仮定された路面変位関連値に基づいて、前記車輪が前記車輪通過予測位置を通過する際の前記ばね上の振動を低減するための目標プレビュー制振制御力を演算し、前記車輪が前記車輪通過予測位置を通過する際に前記制御力発生装置により発生される制御力が前記目標プレビュー制振制御力になるように前記制御力発生装置を制御するよう構成され、
更に、前記第一の制御ユニットは、仮定された路面変位関連値を通信により取得したときには、仮定された路面変位関連値の低周波成分を抽出処理し、抽出処理後の仮定された路面変位関連値に基づいて、前記車輪が前記車輪通過予測位置を通過する際の前記ばね上の振動を低減するための目標プレビュー制振制御力を演算するよう構成された、
車両用プレビュー制振制御装置。 - 請求項7に記載の車両用プレビュー制振制御装置において、前記第一の制御ユニットは、前記抽出処理により抽出する成分の周波数が低いほど、前記所定の隣接領域の前記車両の進行方向を横切る方向の大きさを大きくするよう構成された、車両用プレビュー制振制御装置。
- 請求項7又は8に記載の車両用プレビュー制振制御装置において、前記第一の制御ユニットは、通信により取得した前記車輪通過予測位置の路面変位関連値が仮定された路面変位関連値であると判定したときには、前記目標プレビュー制振制御力を低減するよう構成された、車両用プレビュー制振制御装置。
- 請求項7乃至9の何れか1項に記載の車両用プレビュー制振制御装置において、
前記車載制御装置は、前記目標プレビュー制振制御力以外の他の目標制振制御力を演算し、前記車輪が前記車輪通過予測位置を通過する際に前記制御力発生装置により発生される制御力が前記他の目標制振制御力になるように前記制御力発生装置を制御する他の制振制御を行うよう構成され、
前記第一の制御ユニットは、通信により取得した前記車輪通過予測位置の路面変位関連値が仮定された路面変位関連値であると判定したときには、前記他の目標制振制御力を増大させるよう構成された、
車両用プレビュー制振制御装置。 - 請求項7乃至10の何れか1項に記載の車両用プレビュー制振制御装置において、前記第二の制御ユニットは、前記プレビュー参照データベースにおける各道路の路面が複数の路面区画に予め区分された路面区画情報を記憶しており、演算した路面変位関連値に対応する位置情報として、前記路面区画を特定可能な位置情報を前記記憶装置に記憶するよう構成された、車両用プレビュー制振制御装置。
- 車両の走行中に車輪の位置及び前記車輪の前方の位置の少なくとも一方の路面の上下変位に関連する路面変位関連情報を検出する路面変位関連情報検出装置と、前記路面変位関連情報検出装置を制御する第一の制御ユニットと、を備えた車載制御装置と、
プレビュー参照データベースを記憶する記憶装置と、前記記憶装置を制御する第二の制御ユニットと、を備えたプレビュー参照データベース制御装置と、
を使用して前記車両のばね上の振動を低減する車両用プレビュー制振制御方法において、
前記路面変位関連情報検出装置により検出された路面変位関連情報と該路面変位関連情報が検出された位置を特定可能な位置情報とを紐づけて前記第二の制御ユニットへ送信するステップと、
前記車両又は他車から送信される路面変位関連情報に基づいて路面の上下変位に関連する路面変位関連値を演算するステップと、
演算された路面変位関連値とそれに対応する位置情報とが紐づけられたデータのセットをプレビュー参照データベースの一部として前記記憶装置に記憶するステップと、
前記プレビュー参照データベースの前記路面変位関連情報及び前記位置情報を使用してプレビュー制振制御を行うステップと、
前記データのセットを前記記憶装置に記憶するステップ及び前記プレビュー制振制御を行うステップの少なくとも一方において、前記路面変位関連情報検出装置により路面変位関連情報が検出された地点に対し前記車両の進行方向を横切る方向に位置する所定の隣接領域の路面変位関連値が、前記地点の路面変位関連値と同一であると仮定するステップと、を含み、
前記データのセットを前記記憶装置に記憶するステップ及び前記プレビュー制振制御を行うステップの少なくとも一方において、前記所定の隣接領域について、仮定された路面変位関連値の低周波成分を抽出処理し、抽出処理後の仮定された路面変位関連値と前記所定の隣接領域の位置を特定可能な位置情報とが紐づけられた仮定のデータのセットを使用するステップ、
を含む、車両用プレビュー制振制御方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020170064A JP7367652B2 (ja) | 2020-10-07 | 2020-10-07 | 車両用プレビュー制振制御装置及び方法 |
| CN202111165455.5A CN114290865B (zh) | 2020-10-07 | 2021-09-30 | 车辆用预见减振控制装置和方法 |
| US17/494,378 US11945273B2 (en) | 2020-10-07 | 2021-10-05 | Preview damping control apparatus and method for a vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020170064A JP7367652B2 (ja) | 2020-10-07 | 2020-10-07 | 車両用プレビュー制振制御装置及び方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022061856A JP2022061856A (ja) | 2022-04-19 |
| JP7367652B2 true JP7367652B2 (ja) | 2023-10-24 |
Family
ID=80931947
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020170064A Active JP7367652B2 (ja) | 2020-10-07 | 2020-10-07 | 車両用プレビュー制振制御装置及び方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11945273B2 (ja) |
| JP (1) | JP7367652B2 (ja) |
| CN (1) | CN114290865B (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7180640B2 (ja) * | 2020-06-10 | 2022-11-30 | トヨタ自動車株式会社 | 車両の制振制御装置、及び制振制御方法 |
| JP7314869B2 (ja) * | 2020-06-24 | 2023-07-26 | トヨタ自動車株式会社 | 車両用制振制御装置及び方法 |
| JP7314897B2 (ja) * | 2020-10-07 | 2023-07-26 | トヨタ自動車株式会社 | 車両用プレビュー制振制御装置及び方法 |
| US11865887B2 (en) | 2021-10-12 | 2024-01-09 | DRiV Automotive Inc. | Suspension system with incremental roll and pitch stiffness control |
| US11865889B2 (en) | 2021-10-12 | 2024-01-09 | DRiV Automotive Inc. | Suspension system with comfort valves between cross-over hydraulic circuits |
| US11904841B2 (en) | 2021-10-12 | 2024-02-20 | DRiV Automotive Inc. | Suspension system integration with advanced driver assistance system |
| US11919355B2 (en) | 2021-10-12 | 2024-03-05 | DRiV Automotive Inc. | Valve diagnostic systems and methods |
| US12059937B2 (en) * | 2021-10-12 | 2024-08-13 | DRiV Automotive Inc. | Suspension system with roll and pitch stiffness deactivation based on road profile information |
| US12097739B2 (en) | 2021-10-12 | 2024-09-24 | DRiV Automotive Inc. | Pump rinsing systems and methods |
| US11912092B2 (en) | 2021-10-12 | 2024-02-27 | DRiV Automotive Inc. | Suspension leak check systems and methods |
| US11938772B2 (en) | 2021-10-12 | 2024-03-26 | DRiV Automotive Inc. | System for grading filling of a hydraulic suspension system |
| CN118407993B (zh) * | 2024-07-04 | 2024-08-27 | 浙大城市学院 | 一种智能汽车电磁减振器控制方法及系统 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009257812A (ja) | 2008-04-14 | 2009-11-05 | Mitsutoyo Corp | 形状測定方法及び形状測定装置 |
| JP2013205196A (ja) | 2012-03-28 | 2013-10-07 | Toyota Motor Corp | 路面状態推定装置 |
| DE102014001691A1 (de) | 2014-02-07 | 2015-08-13 | Audi Ag | Verfahren zum Betrieb eines aktiven Fahrwerksystems eines Kraftfahrzeugs und Kraftfahrzeug |
| US20150294161A1 (en) | 2012-10-31 | 2015-10-15 | Tk Holdings, Inc. | Vehicular path sensing system and method |
| JP2016111501A (ja) | 2014-12-05 | 2016-06-20 | 旭化成エレクトロニクス株式会社 | センサ及びセンサデータの出力方法並びにセンサシステム |
| JP2016190621A (ja) | 2015-03-31 | 2016-11-10 | Kyb株式会社 | サスペンション振動情報推定装置 |
| JP2017226270A (ja) | 2016-06-21 | 2017-12-28 | Kyb株式会社 | 車両制御装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070260438A1 (en) * | 2006-05-08 | 2007-11-08 | Langer William J | Vehicle testing and simulation using integrated simulation model and physical parts |
| JP4525651B2 (ja) * | 2006-09-15 | 2010-08-18 | トヨタ自動車株式会社 | 車両用サスペンションシステム |
| EP2364866B1 (en) * | 2008-12-01 | 2013-08-28 | Toyota Jidosha Kabushiki Kaisha | Electromagnetic suspension system |
| DE102009027939A1 (de) * | 2009-02-03 | 2010-08-05 | Robert Bosch Gmbh | Verfahren zur Fahrwerkregelung eines Kraftfahrzeugs, sowie Vorrichtung zur Durchführung |
| US8788146B1 (en) | 2013-01-08 | 2014-07-22 | Ford Global Technologies, Llc | Adaptive active suspension system with road preview |
| EP4450845A2 (en) | 2013-03-15 | 2024-10-23 | ClearMotion, Inc. | Active vehicle suspension improvements |
| DE102015002595A1 (de) * | 2015-02-28 | 2016-09-01 | Audi Ag | Verfahren zum Kompensieren von vertikalen Bewegungen |
| US10053148B2 (en) | 2015-06-15 | 2018-08-21 | GM Global Technology Operations LLC | Toe optimization system for a vehicle |
| US10315481B2 (en) * | 2015-11-05 | 2019-06-11 | Ford Global Technologies, Llc | Systems and methods for vehicle dynamics assignment |
| CN105818633B (zh) * | 2016-03-24 | 2019-01-08 | 江苏大学 | 一种基于智能网联的多工况悬架预瞄系统及其控制方法 |
| US10828954B2 (en) * | 2016-07-13 | 2020-11-10 | Ford Global Technologies, Llc | Ride performance optimization systems and devices, and related methods |
| US10613919B1 (en) * | 2019-10-28 | 2020-04-07 | Capital One Services, Llc | System and method for data error notification in interconnected data production systems |
| JP7314897B2 (ja) * | 2020-10-07 | 2023-07-26 | トヨタ自動車株式会社 | 車両用プレビュー制振制御装置及び方法 |
-
2020
- 2020-10-07 JP JP2020170064A patent/JP7367652B2/ja active Active
-
2021
- 2021-09-30 CN CN202111165455.5A patent/CN114290865B/zh active Active
- 2021-10-05 US US17/494,378 patent/US11945273B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009257812A (ja) | 2008-04-14 | 2009-11-05 | Mitsutoyo Corp | 形状測定方法及び形状測定装置 |
| JP2013205196A (ja) | 2012-03-28 | 2013-10-07 | Toyota Motor Corp | 路面状態推定装置 |
| US20150294161A1 (en) | 2012-10-31 | 2015-10-15 | Tk Holdings, Inc. | Vehicular path sensing system and method |
| DE102014001691A1 (de) | 2014-02-07 | 2015-08-13 | Audi Ag | Verfahren zum Betrieb eines aktiven Fahrwerksystems eines Kraftfahrzeugs und Kraftfahrzeug |
| JP2016111501A (ja) | 2014-12-05 | 2016-06-20 | 旭化成エレクトロニクス株式会社 | センサ及びセンサデータの出力方法並びにセンサシステム |
| JP2016190621A (ja) | 2015-03-31 | 2016-11-10 | Kyb株式会社 | サスペンション振動情報推定装置 |
| JP2017226270A (ja) | 2016-06-21 | 2017-12-28 | Kyb株式会社 | 車両制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114290865A (zh) | 2022-04-08 |
| US20220105771A1 (en) | 2022-04-07 |
| JP2022061856A (ja) | 2022-04-19 |
| CN114290865B (zh) | 2024-03-29 |
| US11945273B2 (en) | 2024-04-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7367652B2 (ja) | 車両用プレビュー制振制御装置及び方法 | |
| JP7314897B2 (ja) | 車両用プレビュー制振制御装置及び方法 | |
| JP7252521B2 (ja) | 車両用制振制御装置及び方法 | |
| JP7322855B2 (ja) | 路面情報作成装置及び車両制御システム | |
| JP2021138241A (ja) | 車両用プレビュー制振制御装置及び車両のプレビュー制振制御方法 | |
| CN113752774B (zh) | 车辆用减振控制装置以及方法 | |
| CN114425934B (zh) | 车辆的控制方法以及控制装置 | |
| JP7180638B2 (ja) | 車両の走行状態制御装置及び方法 | |
| JP2021187354A (ja) | 制振制御装置及び制振制御方法 | |
| CN114435056B (zh) | 减振控制装置 | |
| CN113771571A (zh) | 车辆的减振控制装置和减振控制方法 | |
| CN113829823B (zh) | 车辆用减振控制装置以及方法 | |
| CN114290863B (zh) | 减振控制装置和数据管理装置 | |
| CN113815635B (zh) | 数据处理装置和数据处理系统 | |
| CN113561724B (zh) | 车辆的减振控制装置、减振控制方法 | |
| CN113759408A (zh) | 位置推定装置和位置推定方法 | |
| JP7306362B2 (ja) | 車両のプレビュー制振制御用データベース作成方法 | |
| CN114379302B (zh) | 车辆的控制方法和控制装置 | |
| CN113771572A (zh) | 车辆的减振控制装置和减振控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220824 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230518 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230531 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230706 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230912 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230925 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7367652 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |