JP7270642B2 - 第1および第2の区分および第2の区分における持上デバイスモータを伴うコンテナ取扱車両 - Google Patents
第1および第2の区分および第2の区分における持上デバイスモータを伴うコンテナ取扱車両 Download PDFInfo
- Publication number
- JP7270642B2 JP7270642B2 JP2020559522A JP2020559522A JP7270642B2 JP 7270642 B2 JP7270642 B2 JP 7270642B2 JP 2020559522 A JP2020559522 A JP 2020559522A JP 2020559522 A JP2020559522 A JP 2020559522A JP 7270642 B2 JP7270642 B2 JP 7270642B2
- Authority
- JP
- Japan
- Prior art keywords
- lifting
- section
- lifting device
- wheels
- container handling
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005540 biological transmission Effects 0.000 claims description 15
- 230000000712 assembly Effects 0.000 claims description 3
- 238000000429 assembly Methods 0.000 claims description 3
- 230000008859 change Effects 0.000 claims description 2
- 230000005484 gravity Effects 0.000 description 8
- 239000003990 capacitor Substances 0.000 description 7
- 230000008901 benefit Effects 0.000 description 5
- 230000009977 dual effect Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 230000004888 barrier function Effects 0.000 description 2
- 230000007257 malfunction Effects 0.000 description 2
- 238000011084 recovery Methods 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 230000004075 alteration Effects 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000005065 mining Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 238000005303 weighing Methods 0.000 description 1
Images






























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0464—Storage devices mechanical with access from above
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0478—Storage devices mechanical for matrix-arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/06—Storage devices mechanical with means for presenting articles for removal at predetermined position or level
- B65G1/065—Storage devices mechanical with means for presenting articles for removal at predetermined position or level with self propelled cars
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/137—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0235—Containers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0235—Containers
- B65G2201/0258—Trays, totes or bins
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Warehouses Or Storage Devices (AREA)
Description
グリッドのレールシステム上でX方向に沿って車両を移動させるための、車輪の第1のセットと、
グリッドのレールシステム上でY方向に沿って車両を移動させるための、車輪の第2のセットであって、Y方向は、X方向に垂直である、車輪の第2のセットと、
車両本体であって、車両本体は、車両本体のX方向およびY方向における水平周辺によって画定される、車両本体占有面積を有し、車両本体は、第1の区分と、第2の区分とを備え、第1の区分は、第1の占有面積を有し、第2の区分は、第2の占有面積を有し、第1および第2の占有面積は、それぞれ、第1および第2の区分のX方向およびY方向における水平周辺によって画定される、車両本体と、
保管システムから保管コンテナを持ち上げるための、持上デバイスと、
保管システムから保管コンテナを持ち上げるとき、持上デバイスを駆動するように配列される、持上デバイスモータと、
を備え、
第1の区分および第2の区分は、第1および第2の占有面積の合計面積が、車両本体占有面積の合計面積に等しく、第1の占有面積の中心点が、車両本体占有面積の中心点に対して中心外れに配列されるように、横並びに配列され、
第1の区分は、保管コンテナを収容するように構成される、保管コンテナ受容空間を画定し、第1の区分はまた、保管システムから保管コンテナを持ち上げるための持上デバイスを収容し、
持上デバイスモータは、第2の区分内に収容される、
コンテナ取扱車両が、説明される。
グリッドのレールシステム上で第1の方向に沿って車両を移動させるために、コンテナ取扱車両の車両本体の対向する部分に配列される、車輪の第1のセットと、
グリッドのレールシステム上で第2の方向に沿って車両を移動させるために、車両本体の対向する部分に配列される、車輪の第2のセットであって、第2の方向は、第1の方向に垂直である、車輪の第2のセットと、
を備え、
車両本体は、車両本体のX方向およびY方向における水平周辺によって画定される占有面積を形成する、全ての側上の壁(壁は、略垂直である)を備え、コンテナ取扱車両はさらに、
第1の区分の占有面積の中心点が、車両本体の占有面積FVの中心点に対して中心外れに配列されるように、横並びに配列される、第1の区分と、第2の区分とを備え、
第2の区分の占有面積F2に対する第1の区分の占有面積F1のサイズ比は、少なくとも2:1であり、
第1の区分は、保管コンテナを収容するように構成され、
第2の区分は、車輪のセットのそれぞれの少なくとも1つの車輪を駆動するためのモータのアセンブリを備える、
コンテナ取扱車両もまた、説明される。
グリッドのレールシステム上で第1の方向に沿って車両を移動させるために、コンテナ取扱車両の車両本体の対向する部分に配列される、車輪の第1のセットと、
グリッドのレールシステム上で第2の方向に沿って車両を移動させるために、車両本体の対向する部分に配列される、車輪の第2のセットであって、第2の方向は、第1の方向に垂直である、車輪の第2のセットと、
を備え、
車両本体は、車両本体のX方向およびY方向における水平周辺によって画定される占有面積を形成する、全ての側上の壁(壁は、略垂直である)を備え、コンテナ取扱車両はさらに、
第1の区分の占有面積の中心点が、車両本体の占有面積FVの中心点に対して中心外れに配列されるように、横並びに配列される、第1の区分および第2の区分を備え、
第2の区分の占有面積F2に対する第1の区分の占有面積F1のサイズ比は、少なくとも2:1であり、
第1の区分は、保管コンテナを収容するように構成され、
第2の区分は、車輪のセットのそれぞれの2つの車輪を駆動するための複数のハブモータ、持上デバイスを駆動するためのモータ、および/または再充電可能バッテリのうちのいずれかを備える、
下層保管システムの3次元グリッドから保管コンテナをピックアップするための、コンテナ取扱車両として定義されてもよい。
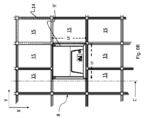
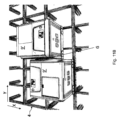
レールシステムは、水平面内に配列され、第1の方向に延在する、平行軌道の第1のセットと、水平面内に配列され、第1の方向に直交する、第2の方向に延在する、平行軌道の第2のセットとを備え、軌道の第1および第2のセットは、複数の隣接するグリッドセルを備える、グリッドパターンを水平面内に形成し、各グリッドセルは、軌道の第1のセットの対向する軌道の対および軌道の第2のセットの対向する軌道の対によって画定される、グリッド開口部を備え、
保管コンテナの複数のスタックは、レールシステムの真下に位置する、保管縦列内に配列され、各保管縦列は、グリッド開口部の垂直下方に位置し、
コンテナ取扱車両は、車両本体のX方向およびY方向における水平周辺によって画定される占有面積を形成する、全ての側上の略垂直な壁と、横並びに配列される、第1の区分および第2の区分とを備える、車両本体を特徴とし、
第1の区分は、保管コンテナを収容するように構成され、
第2の区分は、車輪のセットのそれぞれの少なくとも1つの車輪を駆動するための少なくともモータのアセンブリを備え、
第1の区分の占有面積は、軌道の第1のセットの対向する軌道の対と軌道の第2のセットの対向する軌道の対との間の、軌道の幅を含む、ある断面積によって画定される、グリッドセルに実質的に等しく、第2の区分は、第1の区分が、隣接するグリッド開口部にわたって位置付けられると、隣り合うグリッド開口部の中に部分的に延在する、
自動化保管および回収システムが、さらに説明される。
X方向においてLX=1.0グリッドセルであり、
Y方向において1<LY<1.5グリッドセルであってもよく、
グリッドセルは、X方向に延設される2つのレールの中間点とY方向に延設される2つのレールの中間点との間の、軌道の幅を含む、断面積として画定される。
車両または全体制御システムが、バッテリが交換されるべきであると決定する。
車両が、バッテリ交換ステーションに移動するように動作される。
交換可能バッテリが、バッテリ筐体から除去される。
車両が、例えば、車両内のコントローラボックス内に配列されるコンデンサ電力供給源を使用して、充電されたバッテリを有するバッテリ交換ステーションに移動するように動作される。
充電されたバッテリが、バッテリ筐体の中に配設される。
車両が、使用できる状態になる。
本発明は、例えば、以下を提供する。
(項目1)
下層保管システム(1)の3次元グリッド(4)から保管コンテナ(6)をピックアップするためのコンテナ取扱車両(9’)であって、
車輪の第1のセット(22)であって、前記車輪の第1のセット(22)は、前記グリッド(4)のレールシステム(8)上でX方向(X)に沿って前記車両(9’)を移動させるためのものである、車輪の第1のセット(22)と、
車輪の第2のセット(23)であって、前記車輪の第2のセット(23)は、前記グリッド(4)のレールシステム(8)上でY方向(Y)に沿って前記車両(9’)を移動させるためのものであり、前記Y方向(Y)は、前記X方向に垂直である、車輪の第2のセット(23)と、
車両本体(13)であって、前記車両本体(13)は、前記車両本体(13)のX方向およびY方向における水平周辺によって画定される車両本体占有面積(FV)を有し、前記車両本体は、第1の区分(204)と、第2の区分(205)とを備え、前記第1の区分(204)は、第1の占有面積(F1)を有し、前記第2の区分(205)は、第2の占有面積(F2)を有し、前記第1および第2の占有面積(F1、F2)は、それぞれ、前記第1および第2の区分(204、205)のX方向およびY方向における水平周辺によって画定される、車両本体(13)と、
前記保管システム(1)から保管コンテナ(6)を持ち上げるための持上デバイス(18)と、
持上デバイスモータ(211、211’)であって、前記持上デバイスモータ(211、211’)は、前記保管システム(1)から保管コンテナ(6)を持ち上げるとき、前記持上デバイス(18)を駆動するように配列される、持上デバイスモータ(211、211’)と
を備え、
前記第1の区分(204)および前記第2の区分(205)は、前記第1および第2の占有面積(F1、F2)の合計面積が、前記車両本体占有面積(FV)の合計面積に等しく、前記第1の占有面積(F1)の中心点が、前記車両本体占有面積(FV)の中心点に対して中心外れに配列されるように、横並びに配列され、
前記第1の区分(204)は、保管コンテナ(6)を収容するように構成される保管コンテナ受容空間を画定し、前記第1の区分(204)はまた、前記保管システム(1)から保管コンテナ(6)を持ち上げるための前記持上デバイス(18)を収容し、
前記持上デバイスモータ(211、211’)は、前記第2の区分(205)内に収容される、コンテナ取扱車両(9’)。
(項目2)
前記第2の占有面積(F2)に対する前記第1の占有面積(F1)のサイズ比は、少なくとも2:1である、項目1に記載のコンテナ取扱車両(9’)。
(項目3)
前記車輪の第1のセット(22)は、前記第1の区分(204)の対向する側上に配列され、前記車輪の第2のセット(23)は、前記車両本体(13)の対向する側上に配列される、前記項目のいずれかに記載のコンテナ取扱車両(9’)。
(項目4)
持上車軸(217)をさらに備え、前記持上デバイスモータ(211、211’)は、前記持上車軸(217)の一方の端部に接続される、前記項目のいずれかに記載のコンテナ取扱車両(9’)。
(項目5)
前記持上車軸(217)と前記持上デバイスモータ(211、211’)との間の前記第2の区分(205)内に配列される角度付きトランスミッション(215)をさらに備える、項目4に記載のコンテナ取扱車両。
(項目6)
前記持上デバイスモータ(211、211’)は、前記角度付きトランスミッション(215)を介して前記持上デバイス車軸(217)に垂直に配列される、項目5に記載のコンテナ取扱車両。
(項目7)
前記持上デバイスモータ(211、211’)は、横方向に角度付けられる、項目6に記載のコンテナ取扱車両(9’)。
(項目8)
前記持上デバイスモータ(211、211’)は、下向きに角度付けられる、項目6に記載のコンテナ取扱車両(9’)。
(項目9)
持上デバイス車軸(217)の延在部が、前記第2の区分(205)の中に延在し、中空シャフトギヤ(215)が、前記持上デバイス車軸(217)の延在部に直接接続される、項目4に記載のコンテナ取扱車両(9’)。
(項目10)
前記中空シャフトギヤ(215)および前記持上デバイスモータ(211、211’)は、横方向に角度付けられる、項目9に記載のコンテナ取扱車両(9’)。
(項目11)
前記持上デバイスは、持上シャフトを備え、前記持上シャフトは、持上バンドの第1の対および持上バンドの第2の対を接続するための第1の端部区分および第2の端部区分を備え、
全ての持上バンドは、前記持上デバイスの持上および下降のために、前記持上デバイスの持上フレームに接続され、
前記持上バンドは、それぞれ、前記持上シャフトおよび前記持上フレーム上の対応する持上バンドコネクタに接続される、第1の端部および第2の端部を有し、
持上バンドの各対は、前記持上シャフトの第1の端部区分に接続される第1の持上バンドと、前記持上シャフトの第2の端部区分に接続される第2の持上バンドとを有し、
前記持上バンドの第1の対は、前記持上シャフトからバンド誘導アセンブリに向かって略水平方向に延在し、前記バンド誘導アセンブリは、垂直方向に延在するように前記持上バンドの第1の対の方向を変化させるように配列され、前記持上バンドの第2の対は、前記持上シャフトから垂直方向に延在する、
前記項目のいずれかに記載のコンテナ取扱車両。
(項目12)
自動化保管および回収システムであって、前記自動化保管および回収システムは、3次元グリッド(4)と、少なくとも1つのコンテナ取扱車両(9’)とを備え、前記グリッドは、その上で前記コンテナ取扱車両が移動し得るレールシステム(8)と、保管コンテナの複数のスタック(7)とを備え、
前記レールシステム(8)は、水平面(P)内に配列され、第1の方向(X)に延在する平行軌道の第1のセット(10)と、前記水平面(P)内に配列され、前記第1の方向(X)に直交する第2の方向(Y)に延在する平行軌道の第2のセット(11)とを備え、前記軌道の第1および第2のセット(10、11)は、複数の隣接するグリッドセル(14)を備えるグリッドパターンを前記水平面(P)内に形成し、各グリッドセルは、前記軌道の第1のセット(10)の対向する軌道の対(10a、10b)および前記軌道の第2のセット(11)の対向する軌道の対(10a、10b)によって画定されるグリッド開口部(15)を備え、
前記保管コンテナ(6)の複数のスタック(7)は、前記レールシステム(8)の真下に位置する保管縦列(5)内に配列され、各保管縦列(5)は、グリッド開口部(15)の垂直下方に位置し、
前記コンテナ取扱車両(9’)は、車両本体(13)を特徴とし、前記車両本体(13)は、前記車両本体(13)のX方向およびY方向における水平周辺によって画定される占有面積を形成する全ての側上の略垂直な壁と、横並びに配列される第1の区分(204)および第2の区分(205)とを備え、
前記第1の区分(204)は、保管コンテナ(6)を収容するように構成される保管コンテナ受容空間を画定し、前記第1の区分(204)はまた、前記保管システム(1)から保管コンテナ(6)を持ち上げるための前記持上デバイス(18)を収容し、
前記持上デバイスモータ(211、211’)は、前記第2の区分(205)内に収容され、
前記第1の区分(204)の占有面積(F1)は、前記軌道の第1のセット(10)の対向する軌道の対(10a、10b)と前記軌道の第2のセット(11)の対向する軌道の対(10a、10b)との間の前記軌道の幅を含むある断面積によって画定されるグリッドセル(14)に実質的に等しく、前記第2の区分(205)は、前記第1の区分が、隣接するグリッド開口部にわたって位置付けられると、隣り合うグリッド開口部(15)の中に部分的に延在する、
自動化保管および回収システム。
(項目13)
前記X方向における前記コンテナ取扱車両(9’)の占有面積(FV)の範囲(LX)および前記Y方向における前記コンテナ取扱車両(9’)の占有面積(FV)の範囲(LY)は、
前記X方向においてLX=1.0グリッドセル(14)であり、
前記Y方向において1<LY<1.5グリッドセル(14)であり、
グリッドセル(14)は、前記X方向に延設される2つのレールの中間点と前記Y方向に延設される2つのレールの中間点との間の前記軌道の幅を含む断面積として画定される、項目11に記載の自動化保管および回収システム。
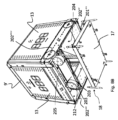
図10Iは、コンテナ取扱車両9’および持上デバイスモータ211’の斜視側面図であり、
図10Jは、コンテナ取扱車両9’および持上デバイスモータ211’のわずかに上方からの斜視側面図であり、
図10Kは、コンテナ取扱車両9’のY方向における第2の区分の中への側面図である。

Claims (10)
- 下層保管システム(1)の3次元グリッド(4)から保管コンテナ(6)をピックアップするためのコンテナ取扱車両(9’)であって、
車輪の第1のセット(22)であって、前記車輪の第1のセット(22)は、前記グリッド(4)のレールシステム(8)上でX方向(X)に沿って前記車両(9’)を移動させるためのものである、車輪の第1のセット(22)と、
車輪の第2のセット(23)であって、前記車輪の第2のセット(23)は、前記グリッド(4)の前記レールシステム(8)上でY方向(Y)に沿って前記車両(9’)を移動させるためのものであり、前記Y方向(Y)は、前記X方向に垂直である、車輪の第2のセット(23)と、
車両本体(13)であって、前記車両本体(13)は、前記車両本体(13)の前記X方向および前記Y方向における水平周辺によって画定される車両本体占有面積(FV)を有し、前記車両本体は、第1の区分(204)と、第2の区分(205)とを備え、前記第1の区分(204)は、第1の占有面積(F1)を有し、前記第2の区分(205)は、第2の占有面積(F2)を有し、前記第1および第2の占有面積(F1、F2)は、それぞれ、前記第1および第2の区分(204、205)の前記X方向および前記Y方向における水平周辺によって画定される、車両本体(13)と、
前記保管システム(1)から保管コンテナ(6)を持ち上げるための持上デバイス(18)と、
持上デバイスモータ(211、211’)であって、前記持上デバイスモータ(211、211’)は、前記保管システム(1)から保管コンテナ(6)を持ち上げるとき、前記持上デバイス(18)を駆動するように配列される、持上デバイスモータ(211、211’)と、
持上車軸(217)であって、前記持上デバイスモータ(211、211’)は、前記持上車軸(217)の一方の端部に接続される、持上車軸(217)と、
前記持上車軸(217)と前記持上デバイスモータ(211、211’)との間の前記第2の区分(205)内に配列される角度付きトランスミッション(215)と
を備え、
前記第1の区分(204)および前記第2の区分(205)は、前記第1および第2の占有面積(F1、F2)の合計面積が、前記車両本体占有面積(FV)の合計面積に等しく、前記第1の占有面積(F1)の中心点が、前記車両本体占有面積(FV)の中心点に対して中心外れに配列されるように、横並びに配列され、
前記第1の区分(204)は、保管コンテナ(6)を収容するように構成される保管コンテナ受容空間を画定し、前記第1の区分(204)はまた、前記保管システム(1)から保管コンテナ(6)を持ち上げるための前記持上デバイス(18)を収容し、
前記持上デバイスモータ(211、211’)は、前記第2の区分(205)内に収容され、
前記持上デバイスモータ(211、211’)は、前記角度付きトランスミッション(215)を介して前記持上デバイス車軸(217)に垂直に配列される、コンテナ取扱車両(9’)。 - 前記第2の占有面積(F2)に対する前記第1の占有面積(F1)のサイズ比は、少なくとも2:1である、請求項1に記載のコンテナ取扱車両(9’)。
- 前記車輪の第1のセット(22)は、前記第1の区分(204)の対向する側上に配列され、前記車輪の第2のセット(23)は、前記車両本体(13)の対向する側上に配列される、請求項1~2のいずれかに記載のコンテナ取扱車両(9’)。
- 前記持上デバイスモータ(211、211’)は、横方向に角度付けられる、請求項1~3のいずれか1項に記載のコンテナ取扱車両(9’)。
- 前記持上デバイスモータ(211、211’)は、下向きに角度付けられる、請求項1に記載のコンテナ取扱車両(9’)。
- 持上デバイス車軸(217)の延在部が、前記第2の区分(205)の中に延在し、中空シャフトギヤ(215)が、前記持上デバイス車軸(217)の前記延在部に直接接続される、請求項1に記載のコンテナ取扱車両(9’)。
- 前記中空シャフトギヤ(215)および前記持上デバイスモータ(211、211’)は、横方向に角度付けられる、請求項6に記載のコンテナ取扱車両(9’)。
- 前記持上デバイスは、持上シャフトを備え、前記持上シャフトは、持上バンドの第1の対および持上バンドの第2の対を接続するための第1の端部区分および第2の端部区分を備え、
全ての持上バンドは、前記持上デバイスの持上および下降のために、前記持上デバイスの持上フレームに接続され、
前記持上バンドは、それぞれ、前記持上シャフトおよび前記持上フレーム上の対応する持上バンドコネクタに接続される、第1の端部および第2の端部を有し、
持上バンドの各対は、前記持上シャフトの第1の端部区分に接続される第1の持上バンドと、前記持上シャフトの第2の端部区分に接続される第2の持上バンドとを有し、
前記持上バンドの第1の対は、前記持上シャフトからバンド誘導アセンブリに向かって略水平方向に延在し、前記バンド誘導アセンブリは、垂直方向に延在するように前記持上バンドの第1の対の方向を変化させるように配列され、前記持上バンドの第2の対は、前記持上シャフトから垂直方向に延在する、請求項1~7のいずれかに記載のコンテナ取扱車両。 - 自動化保管および回収システムであって、前記自動化保管および回収システムは、3次元グリッド(4)と、少なくとも1つのコンテナ取扱車両(9’)とを備え、前記グリッドは、その上で前記コンテナ取扱車両が移動し得るレールシステム(8)と、保管コンテナの複数のスタック(7)とを備え、
前記レールシステム(8)は、水平面(P)内に配列され、第1の方向(X)に延在する平行軌道の第1のセット(10)と、前記水平面(P)内に配列され、前記第1の方向(X)に直交する第2の方向(Y)に延在する平行軌道の第2のセット(11)とを備え、前記軌道の第1および第2のセット(10、11)は、複数の隣接するグリッドセル(14)を備えるグリッドパターンを前記水平面(P)内に形成し、各グリッドセルは、前記軌道の第1のセット(10)の対向する軌道の対(10a、10b)および前記軌道の第2のセット(11)の対向する軌道の対(10a、10b)によって画定されるグリッド開口部(15)を備え、
前記保管コンテナ(6)の複数のスタック(7)は、前記レールシステム(8)の真下に位置する保管縦列(5)内に配列され、各保管縦列(5)は、グリッド開口部(15)の垂直下方に位置し、
前記コンテナ取扱車両(9’)は、車両本体(13)を特徴とし、前記車両本体(13)は、前記車両本体(13)のX方向およびY方向における水平周辺によって画定される占有面積を形成する全ての側上の略垂直な壁と、横並びに配列される第1の区分(204)および第2の区分(205)とを備え、
前記第1の区分(204)は、保管コンテナ(6)を収容するように構成される保管コンテナ受容空間を画定し、前記第1の区分(204)はまた、前記保管システム(1)から保管コンテナ(6)を持ち上げるための持上デバイス(18)を収容し、
持上デバイスモータ(211、211’)が、前記第2の区分(205)内に収容され、
持上車軸(217)であって、前記持上デバイスモータ(211、211’)は、前記持上車軸(217)の一方の端部に接続され、
角度付きトランスミッション(215)が、前記持上車軸(217)と前記持上デバイスモータ(211、211’)との間の前記第2の区分(205)内に配列され、前記持上デバイスモータ(211、211’)は、前記角度付きトランスミッション(215)を介して前記持上デバイス車軸(217)に垂直に配列され、
前記第1の区分(204)の占有面積(F1)は、前記軌道の第1のセット(10)の対向する軌道の対(10a、10b)と前記軌道の第2のセット(11)の対向する軌道の対(10a、10b)との間の前記軌道の幅を含むある断面積によって画定されるグリッドセル(14)に実質的に等しく、前記第2の区分(205)は、前記第1の区分が、隣接するグリッド開口部にわたって位置付けられると、隣り合うグリッド開口部(15)の中に部分的に延在する、自動化保管および回収システム。 - 前記X方向における前記コンテナ取扱車両(9’)の占有面積(FV)の範囲(LX)および前記Y方向における前記コンテナ取扱車両(9’)の占有面積(FV)の範囲(LY)は、
前記X方向においてLX=1.0グリッドセル(14)であり、
前記Y方向において1<LY<1.5グリッドセル(14)であり、
グリッドセル(14)は、前記X方向に延設される2つのレールの中間点と前記Y方向に延設される2つのレールの中間点との間の前記軌道の幅を含む断面積として画定される、請求項9に記載の自動化保管および回収システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023071463A JP7571191B2 (ja) | 2018-04-25 | 2023-04-25 | 第1および第2の区分および第2の区分における持上デバイスモータを伴うコンテナ取扱車両 |
Applications Claiming Priority (13)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| NO20180589 | 2018-04-25 | ||
| NO20180589A NO344970B1 (en) | 2018-04-25 | 2018-04-25 | Container-handling vehicle comprising a lifting device and method of raising or lowering a storage container relative a container-handling vehicle having a lifting device |
| NO20180590A NO346347B1 (en) | 2018-04-25 | 2018-04-25 | Container handling vehicle comprising first and second section and assembly of motors in second section, and system |
| NO20180591A NO346364B1 (en) | 2018-04-25 | 2018-04-25 | Container handling vehicle with first and second sections and battery in second section, and system. |
| NO20180591 | 2018-04-25 | ||
| NO20180590 | 2018-04-25 | ||
| PCT/EP2018/077732 WO2019206440A1 (en) | 2018-04-25 | 2018-10-11 | Container handling vehicle with first and second sections and with battery in second section |
| EPPCT/EP2018/077713 | 2018-10-11 | ||
| PCT/EP2018/077687 WO2019206437A1 (en) | 2018-04-25 | 2018-10-11 | Container-handling vehicle |
| EPPCT/EP2018/077687 | 2018-10-11 | ||
| PCT/EP2018/077713 WO2019206439A1 (en) | 2018-04-25 | 2018-10-11 | Container handling vehicle with first and second sections with motor in second section |
| EPPCT/EP2018/077732 | 2018-10-11 | ||
| PCT/EP2019/053672 WO2019206487A1 (en) | 2018-04-25 | 2019-02-14 | Container handling vehicle with first and second sections and lifting device motor in second section |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023071463A Division JP7571191B2 (ja) | 2018-04-25 | 2023-04-25 | 第1および第2の区分および第2の区分における持上デバイスモータを伴うコンテナ取扱車両 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2021522137A JP2021522137A (ja) | 2021-08-30 |
| JPWO2019206487A5 JPWO2019206487A5 (ja) | 2022-02-21 |
| JP7270642B2 true JP7270642B2 (ja) | 2023-05-10 |
Family
ID=72896210
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020559522A Active JP7270642B2 (ja) | 2018-04-25 | 2019-02-14 | 第1および第2の区分および第2の区分における持上デバイスモータを伴うコンテナ取扱車両 |
| JP2020559523A Active JP7304893B2 (ja) | 2018-04-25 | 2019-02-14 | 第1および第2の区分ならびに第2の区分における車輪のうちの2つの上のより大きい車輪モータを伴うコンテナ取扱車両 |
| JP2023071463A Active JP7571191B2 (ja) | 2018-04-25 | 2023-04-25 | 第1および第2の区分および第2の区分における持上デバイスモータを伴うコンテナ取扱車両 |
| JP2023104914A Pending JP2023120407A (ja) | 2018-04-25 | 2023-06-27 | 第1および第2の区分ならびに車輪のセットの各々の少なくとも1つの車輪を駆動するための第2の区分におけるモータのアセンブリを伴うコンテナ取扱車両 |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020559523A Active JP7304893B2 (ja) | 2018-04-25 | 2019-02-14 | 第1および第2の区分ならびに第2の区分における車輪のうちの2つの上のより大きい車輪モータを伴うコンテナ取扱車両 |
| JP2023071463A Active JP7571191B2 (ja) | 2018-04-25 | 2023-04-25 | 第1および第2の区分および第2の区分における持上デバイスモータを伴うコンテナ取扱車両 |
| JP2023104914A Pending JP2023120407A (ja) | 2018-04-25 | 2023-06-27 | 第1および第2の区分ならびに車輪のセットの各々の少なくとも1つの車輪を駆動するための第2の区分におけるモータのアセンブリを伴うコンテナ取扱車両 |
Country Status (9)
| Country | Link |
|---|---|
| US (6) | US11465842B2 (ja) |
| EP (2) | EP3784602B1 (ja) |
| JP (4) | JP7270642B2 (ja) |
| CN (4) | CN114604550A (ja) |
| CA (2) | CA3095688A1 (ja) |
| DK (1) | DK3784603T3 (ja) |
| ES (2) | ES2980146T3 (ja) |
| PL (2) | PL3784602T3 (ja) |
| WO (1) | WO2019206487A1 (ja) |
Families Citing this family (140)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114604550A (zh) | 2018-04-25 | 2022-06-10 | 自动存储科技股份有限公司 | 集装箱搬运车辆以及自动储存和取回系统 |
| GB201903982D0 (en) * | 2019-03-22 | 2019-05-08 | Ocado Innovation Ltd | Load-handling device |
| GB202001012D0 (en) * | 2020-01-24 | 2020-03-11 | Ocado Innovation Ltd | Raising and lowering containers |
| CN113401548B (zh) * | 2020-03-16 | 2023-07-11 | 因特利格雷特总部有限责任公司 | 用于多深度存放架的自动化穿梭车系统 |
| EP4211408A1 (en) | 2020-09-11 | 2023-07-19 | Autostore Technology AS | System of temperature control in an automated storage system |
| WO2022112166A1 (en) | 2020-11-30 | 2022-06-02 | Autostore Technology AS | A remotely operated vehicle for handling a storage container on a rail system of an automated storage and retrieval system |
| NO346540B1 (en) | 2020-12-23 | 2022-09-26 | Autostore Tech As | An access station for an automated storage and retrieval system and method for using same |
| US20240166437A1 (en) | 2021-03-01 | 2024-05-23 | Autostore Technology AS | An automated storage system |
| WO2022200567A2 (en) | 2021-03-25 | 2022-09-29 | Autostore Technology AS | Bracing arrangement with damper |
| NO347583B1 (en) | 2021-03-25 | 2024-01-22 | Autostore Tech As | Bracing arrangement |
| NO348008B1 (en) | 2021-04-09 | 2024-06-17 | Autostore Tech As | Product handling system |
| JP2024513100A (ja) | 2021-04-09 | 2024-03-21 | オートストアー テクノロジー アーエス | 貯蔵コンテナ内に貯蔵された配送コンテナを取り扱うためのコンテナハンドリング車両およびその方法 |
| NO20211040A1 (en) | 2021-04-09 | 2022-10-10 | Autostore Tech As | A container handling vehicle for handling a delivery container stored within a storage container and a method thereof. |
| NO20210494A1 (en) | 2021-04-20 | 2022-10-21 | Autostore Tech As | A Method and vehicle for rescuing a stalled container handling vehicle |
| NO347479B1 (en) | 2021-04-27 | 2023-11-20 | Autostore Tech As | A double ended access station for an automated storage and retrieval system and a method for using same |
| NO346814B1 (en) | 2021-04-28 | 2023-01-16 | Autostore Tech As | Container handler and method for handling a storage container |
| US20240217741A1 (en) | 2021-05-21 | 2024-07-04 | Autostore Technology AS | A storage column module for coupling to a framework structure of an automated storage and retrieval system |
| NO20210679A1 (en) | 2021-05-28 | 2022-11-29 | Autostore Tech As | An automated storage and retrieval system with a dynamic storage section and a method of using same |
| NO346975B1 (en) | 2021-05-21 | 2023-03-20 | Autostore Tech As | Automated storage and retrieval system comprising a transfer column with side opening with blocker and method of operating blocker |
| NO346915B1 (en) | 2021-05-27 | 2023-02-27 | Autostore Tech As | Rail Joint |
| NO346798B1 (en) | 2021-05-28 | 2023-01-16 | Autostore Tech As | An assembly and a method for handling goods holders and an automated storage and retrieval system comprising said assembly |
| WO2022248470A1 (en) | 2021-05-28 | 2022-12-01 | Autostore Technology AS | A remotely operated vehicle with top guiding and a method of using same |
| NO346980B1 (en) | 2021-06-04 | 2023-03-27 | Autostore Tech As | Service Vehicle Unit |
| NO346764B1 (en) | 2021-06-10 | 2022-12-19 | Autostore Tech As | A storage container for an automated, grid-based storage and retrieval system. |
| NO346930B1 (en) | 2021-06-30 | 2023-03-06 | Autostore Tech As | An access station for an automated storage and retrieval system, an automated storage and retrieval system comprising the access station and a method of using same |
| NO20210849A1 (en) | 2021-06-30 | 2023-01-02 | Autostore Tech As | An access station for an automated storage and retrieval system and a method of presenting a goods holder at the access station |
| NO346982B1 (en) | 2021-06-30 | 2023-03-27 | Autostore Tech As | System, method and computer program product of determining a position of a container handling vehicle in an automated grid based storage and retrieval system |
| NO346963B1 (en) | 2021-08-23 | 2023-03-20 | Autostore Tech As | Disinfection station for a storage container |
| NO346957B1 (en) | 2021-08-27 | 2023-03-20 | Autostore Tech As | A gripper assembly |
| NO347370B1 (en) | 2021-09-07 | 2023-10-02 | Autostore Tech As | Storage container for produce |
| EP4144669A1 (en) | 2021-09-07 | 2023-03-08 | Autostore Technology AS | System and method for gravitational unloading of items from a container |
| NO348060B1 (en) | 2021-09-17 | 2024-07-08 | Autostore Tech As | A container buffering assembly, a storage system comprising the container buffering assembly, and associated methods |
| NO347021B1 (en) | 2021-09-17 | 2023-04-17 | Autostore Tech As | Storage system |
| NO347003B1 (en) | 2021-09-24 | 2023-04-03 | Autostore Tech As | Storage grid for vertical farming |
| NO347604B1 (en) | 2021-09-29 | 2024-01-29 | Autostore Tech As | A hatch assembly for a port of a storage and retrieval system and a method for controlling operation of the hatch assembly |
| NO20211238A1 (en) | 2021-10-13 | 2023-04-14 | Autostore Tech As | A delivery port for delivery of goods contained in goods holders |
| NO20211250A1 (en) | 2021-10-18 | 2023-04-19 | Autostore Tech As | A service vehicle for an automated storage and retrieval system |
| NO347132B1 (en) | 2021-10-19 | 2023-05-30 | Autostore Tech As | An assembly comprising a storage cell and a goods holder, a module comprising a plurality of the assemblies and a storage and retrieval system comprising the module |
| NO347078B1 (en) | 2021-10-25 | 2023-05-08 | Autostore Tech As | Access station safety mechanism |
| NO20211300A1 (en) | 2021-10-29 | 2023-05-01 | Autostore Tech As | Robotic container handler, an access and distribution station, a storage and retrieval system and a method thereof |
| NO347302B1 (en) | 2021-11-01 | 2023-09-04 | Autostore Tech As | Storage system |
| NO347123B1 (en) | 2021-11-10 | 2023-05-22 | Autostore Tech As | A vehicle-portable grid assessment device |
| NO347063B1 (en) | 2021-11-11 | 2023-05-02 | Autostore Tech As | Storage system comprising a vehicle gate arrangement, a vehicle gate arrangement and method of moving a vehicle |
| NO347126B1 (en) | 2021-11-16 | 2023-05-30 | Autostore Tech As | Lifting frame assembly with extendible and retractable guide members, container handling vehicle and storage system, and associated method. |
| NO347833B1 (en) | 2021-11-30 | 2024-04-15 | Autostore Tech As | A system for transporting a product item to an access station |
| NO347538B1 (en) | 2021-11-30 | 2023-12-18 | Autostore Tech As | A storage module for an automated storage and retrieval system and method for using same |
| NO20211460A1 (en) | 2021-12-03 | 2023-06-05 | Autostore Tech As | A levelling assembly for a storage and retrieval system |
| NO20211496A1 (en) | 2021-12-13 | 2023-06-14 | Autostore Tech As | Method for delivering goods to a customer utilizing optical character recognition |
| NO20211507A1 (en) | 2021-12-14 | 2023-06-15 | Autostore Tech As | Buffer system for a station of a storage and retrieval system and method of using a buffer system at a station |
| EP4448418A1 (en) | 2021-12-15 | 2024-10-23 | Autostore Technology AS | An air flow control device, an automated storage and retrieval system comprising such a device and a method for thermally managing air in an automated storage and retrieval system |
| NO347687B1 (en) | 2021-12-15 | 2024-02-19 | Autostore Tech As | System and method of temperature control in an automated grid based storage and retrieval system |
| NO20211521A1 (en) | 2021-12-16 | 2023-06-19 | Autostore Tech As | Crossing with thermal expansion joint for a rail-based grid and method providing a crossing |
| NO347201B1 (en) | 2021-12-17 | 2023-07-03 | Autostore Tech As | A method of operating an automated storage and retrieval system |
| NO346913B1 (en) | 2021-12-21 | 2023-02-27 | Autostore Tech As | Storage system for vertical farming and a method thereof |
| NO347211B1 (en) | 2021-12-21 | 2023-07-10 | Autostore Tech As | Trash handling arrangement for an automated storage system |
| US12115682B2 (en) * | 2021-12-28 | 2024-10-15 | 1Mrobotics Ltd. | Delivery station and method for autonomously storing and delivering goods |
| NO347235B1 (en) | 2022-01-07 | 2023-07-24 | Autostore Tech As | Variable temperature zone in a storage and retrieval system |
| NO347254B1 (en) | 2022-01-11 | 2023-08-14 | Autostore Tech As | Storage system |
| CN114523472B (zh) * | 2022-01-24 | 2023-05-23 | 湖南视比特机器人有限公司 | 一种工件协同抓取方法、系统及存储介质 |
| NO20220242A1 (en) | 2022-02-23 | 2023-08-24 | Autostore Tech As | Storage system comprising a framework adjuster |
| NO347574B1 (en) | 2022-02-28 | 2024-01-15 | Autostore Tech As | A device and a method for determining rotational position of a rotating shaft |
| NO347586B1 (en) | 2022-03-08 | 2024-01-22 | Autostore Tech As | A remotely operated vehicle, an automated storage and retrieval system and a method of driving a remotely operated vehicle for handling a goods holder of an automated storage and retrieval system |
| NO347587B1 (en) | 2022-03-08 | 2024-01-22 | Autostore Tech As | A remotely operated vehicle, an automated storage and retrieval system and a method of operating a remotely operated vehicle for handling a goods holder of an automated storage and retrieval system |
| WO2023169900A1 (en) | 2022-03-08 | 2023-09-14 | Autostore Technology AS | Container handling vehicle |
| WO2023169987A1 (en) | 2022-03-08 | 2023-09-14 | Autostore Technology AS | Track sensor arrangement |
| NO347439B1 (en) | 2022-03-08 | 2023-11-06 | Autostore Tech As | Container handling vehicle |
| NO347658B1 (en) | 2022-03-15 | 2024-02-12 | Autostore Tech As | Service trolley, an automated storage and retrieval system comprising the trolley, and method of operating the trolley |
| NO347372B1 (en) | 2022-03-23 | 2023-10-02 | Autostore Tech As | A remotely operated vehicle for an automated storage and retrieval system |
| NO20220389A1 (en) | 2022-03-30 | 2023-10-02 | Autostore Tech As | Storage system with containers and access frames |
| NO347388B1 (en) | 2022-03-30 | 2023-10-09 | Autostore Tech As | Method, system and computer program product for determining a route for a container handling vehicle |
| NO347454B1 (en) | 2022-04-28 | 2023-11-06 | Autostore Tech As | A system, method and computer program product for rental of physical items |
| NO347584B1 (en) | 2022-04-29 | 2024-01-22 | Autostore Tech As | Two part storage container with an assembled configuration and a split configuration |
| NO347554B1 (en) | 2022-04-29 | 2024-01-15 | Autostore Tech As | Conveyor access station for an automated storage and retrieval system and a method for using same |
| NO347806B1 (en) | 2022-05-02 | 2024-03-25 | Autostore Tech As | Positioning tool |
| NO20220504A1 (en) | 2022-05-03 | 2023-11-06 | Autostore Tech As | A container handler, a storage and retrieval system comprising the container handler and a method for handling a container by means of the container handler |
| NO347763B1 (en) | 2022-05-03 | 2024-03-18 | Autostore Tech As | Local positioning system |
| NO20220560A1 (en) | 2022-05-11 | 2023-11-13 | Autostore Tech As | Container handling vehicle with all wheel drive in at least one direction, associated system and method of assembling |
| NO20220625A1 (en) | 2022-05-31 | 2023-12-01 | Autostore Tech As | Weighing method |
| NO20220692A1 (en) | 2022-06-17 | 2023-12-18 | Autostore Tech As | A method and a system for determining condition of a component of a remotely operated vehicle |
| NO20220709A1 (en) | 2022-06-21 | 2023-12-22 | Autostore Tech As | An access station for an automated storage and retrieval system |
| NO20220739A1 (en) | 2022-06-29 | 2024-01-01 | Autostore Tech As | Container handling vehicle with motor at lower elevation than first and second lifting shafts, a system comprising the container handling vehicle, and method of driving the first and second lifting shafts |
| NO347700B1 (en) | 2022-06-29 | 2024-02-26 | Autostore Tech As | Rail vehicle |
| NO347558B1 (en) * | 2022-06-29 | 2024-01-15 | Autostore Tech As | Container handling vehicle |
| WO2024008627A1 (en) | 2022-07-08 | 2024-01-11 | Autostore Technology AS | Dynamic tuning of dig-down |
| NO347924B1 (en) | 2022-08-12 | 2024-05-13 | Autostore Tech As | An automated storage and retrieval system having a container transfer system and a method thereof |
| NO20220878A1 (en) | 2022-08-12 | 2024-02-13 | Autostore Tech As | An automated storage and retrieval system having a container transfer apparatus, and a method thereof |
| NO347713B1 (en) | 2022-08-25 | 2024-03-04 | Autostore Tech As | Batch picking interface |
| NO20220926A1 (en) | 2022-08-29 | 2024-03-01 | Autostore Tech As | Storage system |
| NO347943B1 (en) | 2022-08-30 | 2024-05-21 | Autostore Tech As | An automated storage and retrieval system comprising a first type of container handling vehicle, a crane and a gantry arrangement, and a method of transferring a storage container |
| NO20220933A1 (en) | 2022-08-30 | 2024-03-01 | Autostore Tech As | A crane trolley assembly, a crane and a system comprisingthe assembly and associated methods |
| NO20220940A1 (en) | 2022-09-01 | 2024-03-04 | Autostore Tech As | System and method for rearranging containers in an automated storage and retrieval system |
| NO20220942A1 (en) | 2022-09-01 | 2024-03-04 | Autostore Tech As | System and method for controlling the movement of containers in an automated storage and retrieval system |
| NO347997B1 (en) | 2022-09-06 | 2024-06-10 | Autostore Tech As | A system and a method for extracting air from an evaporator unit associated with an automated storage and retrieval system |
| NO20221018A1 (en) | 2022-09-26 | 2024-03-27 | Autostore Tech As | Container handling vehicle |
| NO347911B1 (en) | 2022-09-26 | 2024-05-13 | Autostore Tech As | Access station |
| NO347993B1 (en) | 2022-09-27 | 2024-06-10 | Autostore Tech As | An automated storage and retrieval system comprising a temperature management system and a method for managing temperature in the automated storage and retrieval system |
| NO347948B1 (en) | 2022-09-29 | 2024-05-21 | Autostore Tech As | Buffer system |
| NO20221038A1 (en) | 2022-09-29 | 2024-04-01 | Autostore Tech As | An automated storage and retrieval system, a container transfer apparatus and a method thereof |
| NO347996B1 (en) | 2022-10-11 | 2024-06-10 | Autostore Tech As | An assembly and a method for transferring a plurality of goods holders |
| NO20221114A1 (en) | 2022-10-18 | 2024-04-19 | Autostore Tech As | A container transport vehicle for with internal receiving space for receiving a storage container from another vehicle, associated system and methods |
| NO20221150A1 (en) | 2022-10-26 | 2024-04-29 | Autostore Tech As | Sensor station and method for predicting vehicle malfunction |
| NO20221149A1 (en) | 2022-10-26 | 2024-04-29 | Autostore Tech As | Detachable sensor jig and method for predicting vehicle malfunction |
| NO347965B1 (en) | 2022-10-28 | 2024-06-03 | Autostore Tech As | A device and method for inserting storage containers into an automated storage and retrieval system |
| WO2024089150A1 (en) | 2022-10-28 | 2024-05-02 | Autostore Technology AS | Method for the stocking of goods in an automated storage and retrieval system |
| WO2024089149A1 (en) | 2022-10-28 | 2024-05-02 | Autostore Technology AS | A device and method for inserting of storage containers with temperature-sensitive goods into a temperature controlled section of an automated storage and retrieval system |
| EP4365118A1 (en) | 2022-11-03 | 2024-05-08 | Autostore Technology AS | A goods holder rotation station and a method of extracting goods from a goods holder |
| NO347966B1 (en) | 2022-11-24 | 2024-06-03 | Autostore Tech As | Vertical farming system, a growth frame and framework structure for the vertical farming system, and a method of providing a root chamber in the vertical farming system |
| NO20221274A1 (en) | 2022-11-25 | 2024-05-27 | Autostore Tech As | A unit for moving a plurality of goods holders and a method of moving the plurality of goods holders |
| NO20221276A1 (en) | 2022-11-25 | 2024-05-27 | Autostore Tech As | An assembly for transporting a plurality of goods holders to/from a grid-based storage and retrieval system |
| NO20221281A1 (en) | 2022-11-29 | 2024-05-30 | Autostore Tech As | Automated storage and retrieval system with large-sized storage containers |
| NO348030B1 (en) | 2022-11-29 | 2024-06-24 | Autostore Tech As | Service vehicle with a center drive unit, system and method for operating service vehicle |
| NO20221302A1 (en) | 2022-12-05 | 2024-06-06 | Autostore Tech As | Lift arrangement and method for moving a storage container in a multi-framework storage system |
| WO2024120858A1 (en) | 2022-12-09 | 2024-06-13 | Autostore Technology AS | Clamp for anchoring a safety harness to a rail system and a method of using same |
| NO20221355A1 (en) | 2022-12-16 | 2024-06-17 | Autostore Technology AS | A container transport vehicle, an automated storage and retrieval system and a method thereof |
| NO20221350A1 (en) | 2022-12-16 | 2024-06-17 | Autostore Tech As | An automated storage and retrieval system with logically operable barriers for safe enter and exit into a transport vehicle, and an associated method |
| NO20221352A1 (en) | 2022-12-16 | 2024-06-17 | Autostore Tech As | An automated storage and retrieval system comprising a vehicle pen and a transport vehicle, and an associated methods |
| WO2024133118A1 (en) | 2022-12-19 | 2024-06-27 | Autostore Technology AS | Container handling vehicle for handling of smaller-sized storage containers in an automated storage and retrieval system |
| NO20221372A1 (en) | 2022-12-20 | 2024-06-21 | Autostore Tech As | System and maintenance for condition based maintenance of port |
| NO20221371A1 (en) | 2022-12-20 | 2024-06-21 | Autostore Tech As | System and maintenance for condition based maintenance of Port |
| NO20221367A1 (en) | 2022-12-20 | 2024-06-21 | Autostore Tech As | System and method for weighing containers |
| NO348016B1 (en) | 2022-12-20 | 2024-06-24 | Autostore Tech As | Container handling vehicle and storage system |
| NO20221374A1 (en) | 2022-12-20 | 2024-06-21 | Autostore Tech As | Service Vehicle |
| NO20221379A1 (en) | 2022-12-21 | 2024-06-24 | Autostore Tech As | Robotic picking and conveyor system |
| NO20221378A1 (en) | 2022-12-21 | 2024-06-24 | Autostore Tech As | A remotely operated picking vehicle, an automated storage and retrieval system, and a method of using same |
| NO20221405A1 (en) | 2022-12-23 | 2024-06-24 | Autostore Tech As | A service vehicle and a method for retrieving a malfunctioning container handling vehicle |
| NO20221406A1 (en) | 2022-12-23 | 2024-06-24 | Autostore Tech As | Method, system and computer program product for moving a storage container |
| NO20230545A1 (en) | 2022-12-27 | 2024-06-28 | Autostore Tech As | Storage system |
| WO2024141364A1 (en) | 2022-12-27 | 2024-07-04 | Autostore Technology AS | A storage system for storage containers comprising a framework structure, stacker frames, storage containers, a stacker frame lifter and a container lifter |
| NO20230191A1 (en) | 2023-02-27 | 2024-08-28 | Autostore Tech As | Access station for an automated storage and retrieval system |
| WO2024180088A1 (en) | 2023-02-27 | 2024-09-06 | Autostore Technology AS | Actuator for moving a storage container |
| NO348165B1 (en) | 2023-03-06 | 2024-09-16 | Autostore Tech As | An adapter for a goods holder for a remotely operated vehicle in a grid-based storage and retrieval system, including a system and method for using same |
| NO348171B1 (en) | 2023-03-06 | 2024-09-16 | Autostore Tech As | A method for adapting a goods holder and an adapter for a goods holder |
| NO348183B1 (en) | 2023-03-14 | 2024-09-23 | Autostore Tech As | Storage system |
| NO348182B1 (en) | 2023-03-16 | 2024-09-23 | Autostore Tech As | A vertically displaceable lifting frame for transporting a goods holder to/from a storage volume of an automated storage and retrieval system |
| WO2024194481A1 (en) | 2023-03-22 | 2024-09-26 | Autostore Technology AS | Container transfer system |
| WO2024200324A1 (en) | 2023-03-24 | 2024-10-03 | Autostore Technology AS | Leveling device |
| WO2024200304A1 (en) | 2023-03-27 | 2024-10-03 | Autostore Technology AS | Charging station service/inspection tool |
| WO2024200791A1 (en) | 2023-03-28 | 2024-10-03 | Autostore Technology AS | Storage system |
| WO2024200638A1 (en) | 2023-03-31 | 2024-10-03 | Autostore Technology AS | Service device for fastening screws of a storage and retrieval system |
| WO2024200640A1 (en) | 2023-03-31 | 2024-10-03 | Autostore Technology AS | Spacer device for a stack of containers of a storage and retrieval system |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009161333A (ja) | 2008-01-09 | 2009-07-23 | Asyst Technologies Japan Inc | 搬送台車及びそのベルト繰り出し量の調整方法 |
| US20150127143A1 (en) | 2012-05-11 | 2015-05-07 | Ocado Limited | Storage systems and methods for retrieving units from a storage system |
| JP2016529181A (ja) | 2013-08-09 | 2016-09-23 | オカド・イノベーション・リミテッド | 保管システムからユニットを回収するための装置 |
| JP2016183050A (ja) | 2012-12-10 | 2016-10-20 | ヤコブ ハッテラント ロジスティクス アーエス | 格納容器を輸送するためのシステム |
Family Cites Families (64)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2701065A (en) * | 1950-09-06 | 1955-02-01 | Charles A Bertel | Apparatus for storing and handling containers |
| US3051321A (en) | 1959-11-23 | 1962-08-28 | Pacific Coast Eng Co | Gantry type crane assembly |
| US3866767A (en) | 1973-02-15 | 1975-02-18 | Rapistan Inc | Mobile tier picking apparatus for a warehousing system |
| JPS6424090U (ja) | 1987-08-04 | 1989-02-09 | ||
| CN2031388U (zh) | 1988-05-01 | 1989-01-25 | 吴运林 | 托盘式连续运输机 |
| JP2580264B2 (ja) | 1988-06-28 | 1997-02-12 | 株式会社ダイフク | 被搬送物吊り下げ装置付き搬送台車 |
| US5020621A (en) * | 1989-12-19 | 1991-06-04 | Martin Christopher V | Electric motor powered skateboard with integral brakes |
| JP3502666B2 (ja) | 1994-07-28 | 2004-03-02 | タニコー株式会社 | 棚板昇降装置 |
| JPH08157016A (ja) | 1994-12-02 | 1996-06-18 | Mitsubishi Heavy Ind Ltd | 縦横走行搬送台車を用いた格納設備 |
| NO317366B1 (no) | 1999-07-01 | 2004-10-18 | Autostore As | Lagringsanlegg med fjernstyrte vogner med to hjulsett og heisinnretning for drift på skinner anlagt i kryss over kolonner av lagringsenheter som er adskilt med vertikale profilstolper |
| SE524006C2 (sv) * | 2002-10-31 | 2004-06-15 | Eab Ab | Vagn för transport av en last längs ett skenpar |
| CA2413590C (en) | 2002-11-27 | 2006-10-10 | Transportes Continuos Interiores, S.A. | Pantographic device for conveying loads in vehicle assembly lines |
| DE102004022209A1 (de) * | 2004-05-04 | 2005-12-01 | Heidelberger Druckmaschinen Ag | Sammel- und Presseinrichtung einer Faltschachtelklebemaschine |
| KR100643381B1 (ko) | 2004-12-08 | 2006-11-10 | 삼성전자주식회사 | 오버헤드호이스트 이송장치 |
| CN2813532Y (zh) | 2005-06-23 | 2006-09-06 | 傅炳煌 | 用于砌块生产线的升降板机 |
| CN100588584C (zh) | 2008-03-26 | 2010-02-10 | 云南昆船设计研究院 | 一种转轨穿梭装置 |
| CN201186760Y (zh) | 2008-04-03 | 2009-01-28 | 江阴圆方机械制造有限公司 | 棒材或管材六角成型装置 |
| KR20110082030A (ko) | 2008-10-02 | 2011-07-15 | 코닌클리즈케 필립스 일렉트로닉스 엔.브이. | 커버된 션트 라인을 갖는 oled 장치 |
| CN201439447U (zh) | 2009-07-21 | 2010-04-21 | 太原矿机电液技术有限公司 | 一种伸缩带式输送机的变频式自动张紧装置 |
| CN101618796B (zh) | 2009-07-21 | 2011-06-08 | 太原理工大学 | 一种伸缩带式输送机的变频式自动张紧装置 |
| CN201703385U (zh) | 2010-07-02 | 2011-01-12 | 昆山华恒工程技术中心有限公司 | 自动换轨小车 |
| CN101898672B (zh) | 2010-07-29 | 2011-12-21 | 上海精星物流设备工程有限公司 | 一种可变轨道的输送小车 |
| CN202079592U (zh) | 2010-12-24 | 2011-12-21 | 江苏大学 | 双轨直线机器人穿梭车 |
| CN202897423U (zh) | 2012-10-12 | 2013-04-24 | 厦门思尔特机器人系统有限公司 | 自动换向子母车 |
| CN202967266U (zh) | 2012-11-28 | 2013-06-05 | 陈定钰 | 穿梭式仓储系统台车 |
| CN202944764U (zh) | 2012-11-30 | 2013-05-22 | 贵阳普天物流技术有限公司 | 一种可升降式穿梭车 |
| CN103895995B (zh) | 2012-12-28 | 2016-04-20 | 昆山光腾智能机械有限公司 | 自动换轨式穿梭车 |
| CN103896000B (zh) | 2012-12-28 | 2016-04-20 | 昆山光腾智能机械有限公司 | 自动换轨式穿梭车 |
| US9280157B2 (en) * | 2013-09-04 | 2016-03-08 | Amazon Technologies, Inc. | System and method for transporting personnel within an active workspace |
| NO340313B1 (no) | 2014-01-08 | 2017-03-27 | Jakob Hatteland Logistics As | Fjernstyrt kjøretøy for å plukke opp lagringsbeholdere fra et lagringssystem, lagringssystem for lagring av beholdere og fremgangsmåte for å bytte en strømkilde |
| SE539991C2 (sv) * | 2014-01-31 | 2018-02-20 | Logevo Ab | Godslagringsarrangemang i flera våningar |
| NO338156B1 (no) * | 2014-02-19 | 2016-08-01 | Jakob Hatteland Logistics As | Avkjølt lagringssystem |
| CN103818672B (zh) * | 2014-02-28 | 2016-06-29 | 上海速锐物流科技有限公司 | 一种三维立体行驶的智能穿梭车及其控制方法 |
| US10618731B2 (en) * | 2014-03-05 | 2020-04-14 | Swisslog Logistics, Inc. | Automated lifting storage cart |
| NO337544B1 (no) | 2014-06-19 | 2016-05-02 | Jakob Hatteland Logistics As | Fjernstyrt kjøretøysammenstilling for å plukke opp lagringsbeholdere fra et lagringssystem |
| US10829303B2 (en) * | 2014-08-22 | 2020-11-10 | Bec Companies, Inc. | Guide track systems for automated material handling, shipping, storage and parking facilities |
| CN104210793B (zh) * | 2014-09-03 | 2016-10-05 | 昆明七零五所科技发展总公司 | 一种凸轮机构式转向穿梭车 |
| CN104210794B (zh) * | 2014-09-03 | 2016-04-27 | 昆明七零五所科技发展总公司 | 一种电动缸驱动式转向的轨道穿梭车 |
| CN104495209A (zh) | 2014-12-31 | 2015-04-08 | 苏州格林电子设备有限公司 | 伸缩式皮带输送机 |
| DK3050824T3 (da) * | 2015-01-28 | 2019-11-04 | Autostore Tech As | Robot til transport af opbevaringsbeholdere |
| CN107466203A (zh) * | 2015-04-15 | 2017-12-12 | 奥卡多创新有限公司 | 存储系统与方法 |
| CN104773494B (zh) | 2015-04-15 | 2017-02-22 | 昆山华恒工程技术中心有限公司 | 换轨穿梭车 |
| WO2016166294A1 (en) * | 2015-04-15 | 2016-10-20 | Ocado Innovation Limited | Object handling system and method |
| CN104859390B (zh) * | 2015-06-10 | 2017-01-11 | 石家庄铁道大学 | 公铁两用轨道除沙车可回转底盘 |
| HUE063992T2 (hu) * | 2015-11-11 | 2024-02-28 | Ocado Innovation Ltd | Robotizált komissiózó rendszerek és berendezések |
| JP6641926B2 (ja) | 2015-11-26 | 2020-02-05 | 株式会社ダイフク | 物品搬送設備 |
| NO20160118A1 (en) | 2016-01-26 | 2017-07-27 | Autostore Tech As | Remotely operated vehicle |
| CN205366815U (zh) | 2016-01-29 | 2016-07-06 | 山东七星实业有限公司 | 一种高位提升机 |
| GB201604100D0 (en) | 2016-03-10 | 2016-04-20 | Ocado Innovation Ltd | Apparatus for retrieving units from a storage system |
| NO344308B1 (en) | 2016-06-21 | 2019-10-28 | Autostore Tech As | Storage system comprising a charging station assembly and method of replacing the power source of a remotely operated vehicle |
| GB201616597D0 (en) | 2016-09-30 | 2016-11-16 | Ocado Innovation Limited | Method and apparatus for retrieving units form a storage system |
| CN110290720B (zh) * | 2016-12-09 | 2022-12-20 | 彼得·麦金农 | 行李箱及用于行李箱的轮座 |
| CN206679768U (zh) | 2017-04-28 | 2017-11-28 | 重庆理工大学 | 一种带式输送机 |
| CN206798444U (zh) * | 2017-05-24 | 2017-12-26 | 山西佰得拓普工贸有限公司 | 一种卧立两用式输送带 |
| US11117743B2 (en) * | 2017-09-28 | 2021-09-14 | Symbotic Llc | Storage and retrieval system |
| NO344310B1 (en) * | 2017-11-22 | 2019-11-04 | Autostore Tech As | Automated storage and retrieval system comprising a three dimensional grid, container-handling vehicle and method of retrieving at least one storage container from the storage 40 storage and retrieval system |
| US10647508B2 (en) * | 2017-11-22 | 2020-05-12 | Brandon Eck | Storage station for storing containers transported by unmanned vehicles |
| NO345129B1 (en) * | 2017-11-23 | 2020-10-12 | Autostore Tech As | Automated storage and retrieval system and a method of operating the same. |
| GB201803771D0 (en) * | 2018-03-09 | 2018-04-25 | Ocado Innovation Ltd | Transporting device position determining apparatus and method |
| GB201804867D0 (en) * | 2018-03-27 | 2018-05-09 | Ocado Innovation Ltd | A transporting device |
| CN114604550A (zh) * | 2018-04-25 | 2022-06-10 | 自动存储科技股份有限公司 | 集装箱搬运车辆以及自动储存和取回系统 |
| WO2020169287A1 (en) * | 2019-02-19 | 2020-08-27 | Autostore Technology AS | Storage system |
| NO346274B1 (en) * | 2020-03-30 | 2022-05-16 | Autostore Tech As | Container handling vehicle |
| NO20200467A1 (en) * | 2020-04-16 | 2021-10-18 | Autostore Tech As | Container handling vehicle with cantilever construction and automated storage and retrieval system comprising a plurality of the container handling vehicles |
-
2019
- 2019-02-14 CN CN202210332645.XA patent/CN114604550A/zh active Pending
- 2019-02-14 JP JP2020559522A patent/JP7270642B2/ja active Active
- 2019-02-14 WO PCT/EP2019/053672 patent/WO2019206487A1/en unknown
- 2019-02-14 EP EP19703759.1A patent/EP3784602B1/en active Active
- 2019-02-14 PL PL19703759.1T patent/PL3784602T3/pl unknown
- 2019-02-14 CA CA3095688A patent/CA3095688A1/en active Pending
- 2019-02-14 JP JP2020559523A patent/JP7304893B2/ja active Active
- 2019-02-14 DK DK19703761.7T patent/DK3784603T3/da active
- 2019-02-14 US US17/048,963 patent/US11465842B2/en active Active
- 2019-02-14 ES ES19703759T patent/ES2980146T3/es active Active
- 2019-02-14 CN CN201980027759.XA patent/CN112041243B/zh active Active
- 2019-02-14 CN CN201980027994.7A patent/CN112041245B/zh active Active
- 2019-02-14 PL PL19703761T patent/PL3784603T3/pl unknown
- 2019-02-14 CA CA3095584A patent/CA3095584A1/en active Pending
- 2019-02-14 CN CN202210563685.5A patent/CN114789868A/zh active Pending
- 2019-02-14 ES ES19703761T patent/ES2912544T3/es active Active
- 2019-02-14 US US17/048,942 patent/US11377298B2/en active Active
- 2019-02-14 EP EP22154825.8A patent/EP4011806B1/en active Active
-
2022
- 2022-06-02 US US17/805,169 patent/US11891246B2/en active Active
- 2022-07-14 US US17/812,637 patent/US11912498B2/en active Active
-
2023
- 2023-04-25 JP JP2023071463A patent/JP7571191B2/ja active Active
- 2023-06-27 JP JP2023104914A patent/JP2023120407A/ja active Pending
- 2023-12-28 US US18/399,330 patent/US20240228162A9/en active Pending
-
2024
- 2024-01-25 US US18/422,983 patent/US20240158167A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009161333A (ja) | 2008-01-09 | 2009-07-23 | Asyst Technologies Japan Inc | 搬送台車及びそのベルト繰り出し量の調整方法 |
| US20150127143A1 (en) | 2012-05-11 | 2015-05-07 | Ocado Limited | Storage systems and methods for retrieving units from a storage system |
| JP2016183050A (ja) | 2012-12-10 | 2016-10-20 | ヤコブ ハッテラント ロジスティクス アーエス | 格納容器を輸送するためのシステム |
| JP2016529181A (ja) | 2013-08-09 | 2016-09-23 | オカド・イノベーション・リミテッド | 保管システムからユニットを回収するための装置 |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7270642B2 (ja) | 第1および第2の区分および第2の区分における持上デバイスモータを伴うコンテナ取扱車両 | |
| EP3784603B1 (en) | Container handling vehicle with first and second sections and larger wheel motors on two of the wheels in the second section | |
| JP7561812B2 (ja) | 第1および第2の区分と共に第2の区分におけるモータを伴うコンテナ取扱車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220210 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220210 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230329 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230403 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230425 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7270642 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |