JP7051390B2 - 航路設定装置、自動操縦装置及び航路設定方法 - Google Patents
航路設定装置、自動操縦装置及び航路設定方法 Download PDFInfo
- Publication number
- JP7051390B2 JP7051390B2 JP2017224131A JP2017224131A JP7051390B2 JP 7051390 B2 JP7051390 B2 JP 7051390B2 JP 2017224131 A JP2017224131 A JP 2017224131A JP 2017224131 A JP2017224131 A JP 2017224131A JP 7051390 B2 JP7051390 B2 JP 7051390B2
- Authority
- JP
- Japan
- Prior art keywords
- route
- setting device
- route setting
- unit
- input operation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 11
- 238000001514 detection method Methods 0.000 claims description 10
- 238000010586 diagram Methods 0.000 description 10
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 238000012545 processing Methods 0.000 description 2
- 239000013049 sediment Substances 0.000 description 2
- 238000005452 bending Methods 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000007429 general method Methods 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
- G01C21/203—Specially adapted for sailing ships
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0487—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser
- G06F3/0488—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser using a touch-screen or digitiser, e.g. input of commands through traced gestures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B49/00—Arrangements of nautical instruments or navigational aids
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0044—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement by providing the operator with a computer generated representation of the environment of the vehicle, e.g. virtual reality, maps
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/0206—Control of position or course in two dimensions specially adapted to water vehicles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0487—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser
- G06F3/0488—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser using a touch-screen or digitiser, e.g. input of commands through traced gestures
- G06F3/04883—Interaction techniques based on graphical user interfaces [GUI] using specific features provided by the input device, e.g. functions controlled by the rotation of a mouse with dual sensing arrangements, or of the nature of the input device, e.g. tap gestures based on pressure sensed by a digitiser using a touch-screen or digitiser, e.g. input of commands through traced gestures for inputting data by handwriting, e.g. gesture or text
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0484—Interaction techniques based on graphical user interfaces [GUI] for the control of specific functions or operations, e.g. selecting or manipulating an object, an image or a displayed text element, setting a parameter value or selecting a range
- G06F3/04847—Interaction techniques to control parameter settings, e.g. interaction with sliders or dials
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Theoretical Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Human Computer Interaction (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Navigation (AREA)
Description
10…航路設定装置
11…表示部
12…入力部
13…表示制御部
141…通過点検出部
142…航路設定部
15…漁労データ取得部
16…記憶部
20…現在位置取得部
21…移動体操縦部
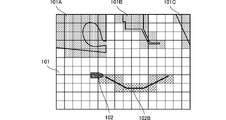
101…海図データ
101A,101B,101C…領域
102…マーク
102A,102B,102C…航路
Claims (22)
- 地図データを表示画面に表示する表示制御部と、
前記地図データが表示された前記表示画面を用いた航路入力操作を受け付ける入力部と、
前記航路入力操作の前記地図データに対する軌跡から、前記地図データにおける移動体の通過点を検出する通過点検出部と、
前記通過点に基づいて、前記移動体の航路を設定する航路設定部と、
を備え、
前記表示制御部は、
前記地図データと共にグリッド線を前記表示画面に表示し、
前記入力部は、
前記グリッド線で区切られた領域単位で前記航路入力操作を受け付け、
前記航路設定部は、
前記航路入力操作を受けた複数の領域を含み、該複数の領域に基づく航行許可範囲を設定し、該航行許可範囲に応じた前記航路を設定する、
航路設定装置。 - 請求項1に記載の航路設定装置であって、
前記入力部は、
前記航路入力操作として、前記グリッド線で区切られた複数の領域のうち、隣接する領域が連続してタッチされるなぞり操作を受け付ける、
航路設定装置。 - 請求項1又は請求項2に記載の航路設定装置であって、
前記グリッド線間の距離は変更可能である、
航路設定装置。 - 請求項1乃至請求項3のいずれかに記載の航路設定装置であって、
前記表示制御部は、前記航路入力操作の軌跡を、前記表示画面に表示する、
航路設定装置。 - 請求項1乃至請求項4のいずれかに記載の航路設定装置であって、
前記航路入力操作は、前記表示画面に対するなぞり操作である、
航路設定装置。 - 請求項1乃至請求項5のいずれかに記載の航路設定装置であって、
前記表示制御部は、前記移動体の位置を取得し、前記地図データ上の前記移動体の位置に対応する前記表示画面上の位置に、前記移動体を表すマークを表示する、 航路設定装置。 - 請求項1乃至請求項6のいずれかに記載の航路設定装置であって、
前記表示制御部は、
表示する地図データ内で航行不可能な領域の表示態様を変更する、
航路設定装置。 - 請求項1乃至請求項7のいずれかに記載の航路設定装置であって、
前記入力部が航路入力操作を時間差で受け付けた場合、
前記表示制御部は、
前記入力部が受け付けた直近の航路入力操作の軌跡のみを前記表示画面上に表示し、
前記航路設定部は、
前記入力部が受け付けた直近の航路入力操作の軌跡を、新たな航路として設定する、
航路設定装置。 - 請求項1乃至請求項8のいずれかに記載の航路設定装置であって、
前記移動体は船舶であり、
前記地図データは海図データである、
航路設定装置。 - 請求項9に記載の航路設定装置であって、
漁労データを取得する漁労データ取得部、
を備え、
前記表示制御部は、前記漁労データ取得部から取得した漁労データを表示する、
航路設定装置。 - 地図データを表示画面に表示する表示制御部と、
前記地図データが表示された前記表示画面を用いた航路入力操作を受け付ける入力部と、
前記航路入力操作の前記地図データに対する軌跡から、前記地図データにおける移動体の通過点を検出する通過点検出部と、
前記通過点に基づいて、前記移動体の航路を設定する航路設定部と、
を備え、
前記入力部が航路入力操作を時間差で受け付けた場合、
前記表示制御部は、
前記入力部が受け付けた直近の航路入力操作の軌跡のみを前記表示画面上に表示し、
前記航路設定部は、
前記入力部が受け付けた直近の航路入力操作の軌跡を、新たな航路として設定する、
航路設定装置。 - 請求項11に記載の航路設定装置であって、
前記表示制御部は、
前記地図データと共にグリッド線を前記表示画面に表示し、
前記入力部は、
前記グリッド線で区切られた領域単位で航路入力操作を受け付ける、
航路設定装置。 - 請求項12に記載の航路設定装置であって、
前記入力部は、
前記航路入力操作として、前記グリッド線で区切られた複数の領域のうち、隣接する領域が連続してタッチされるなぞり操作を受け付ける、
航路設定装置。 - 請求項11乃至請求項13のいずれかに記載の航路設定装置であって、
前記表示制御部は、前記航路入力操作の軌跡を、前記表示画面に表示する、
航路設定装置。 - 請求項11乃至請求項14のいずれかに記載の航路設定装置であって、
前記航路入力操作は、前記表示画面に対するなぞり操作である、
航路設定装置。 - 請求項11乃至請求項15のいずれかに記載の航路設定装置であって、
前記表示制御部は、前記移動体の位置を取得し、前記地図データ上の前記移動体の位置に対応する前記表示画面上の位置に、前記移動体を表すマークを表示する、
を備える航路設定装置。 - 請求項11乃至請求項16のいずれかに記載の航路設定装置であって、
前記表示制御部は、
表示する地図データ内で航行不可能な領域の表示態様を変更する、
航路設定装置。 - 請求項11乃至請求項17のいずれかに記載の航路設定装置であって、
前記移動体は船舶であり、
前記地図データは海図データである、
航路設定装置。 - 請求項18に記載の航路設定装置であって、
漁労データを取得する漁労データ取得部、
を備え、
前記表示制御部は、前記漁労データ取得部から取得した漁労データを表示する、
航路設定装置。 - 請求項1乃至請求項19のいずれかに記載の航路設定装置と、
前記航路設定装置により設定された航路に沿って、移動体を航行させる移動体操縦部と、
を備えた自動操縦装置。 - 地図データと共にグリッド線を表示画面に表示し、
前記表示画面を用いて、前記グリッド線で区切られた領域単位で航路入力操作を受け付け、
前記航路入力操作の前記地図データに対する軌跡から、前記地図データにおける移動体の通過点を検出し、
前記通過点に基づいて航路を設定し、
前記航路入力操作を受けた複数の領域を含み、該複数の領域に基づく航行許可範囲を設定し、該航行許可範囲に応じた前記航路を設定する、
航路設定方法。 - 地図データを表示画面に表示し、
前記地図データが表示された前記表示画面を用いた航路入力操作を受け付け、
前記航路入力操作の前記地図データに対する軌跡から、前記地図データにおける移動体の通過点を検出し、
前記通過点に基づいて航路を設定し、
前記航路入力操作を時間差で受け付けた場合、
前記航路入力操作で受け付けた直近の航路入力操作の軌跡のみを前記表示画面上に表示し、
前記航路入力操作で受け付けた直近の航路入力操作の軌跡を、新たな航路として設定する、
航路設定方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017224131A JP7051390B2 (ja) | 2017-11-22 | 2017-11-22 | 航路設定装置、自動操縦装置及び航路設定方法 |
| CN201811381152.5A CN109813326A (zh) | 2017-11-22 | 2018-11-20 | 航路设定装置、自动操纵装置以及航路设定方法 |
| US16/197,062 US11054263B2 (en) | 2017-11-22 | 2018-11-20 | Route setting device, automatic pilot, and method of setting route |
| JP2022053092A JP7176144B2 (ja) | 2017-11-22 | 2022-03-29 | 航路設定装置、自動操縦装置及び航路設定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017224131A JP7051390B2 (ja) | 2017-11-22 | 2017-11-22 | 航路設定装置、自動操縦装置及び航路設定方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022053092A Division JP7176144B2 (ja) | 2017-11-22 | 2022-03-29 | 航路設定装置、自動操縦装置及び航路設定方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019095270A JP2019095270A (ja) | 2019-06-20 |
| JP2019095270A5 JP2019095270A5 (ja) | 2021-01-07 |
| JP7051390B2 true JP7051390B2 (ja) | 2022-04-11 |
Family
ID=66532854
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017224131A Active JP7051390B2 (ja) | 2017-11-22 | 2017-11-22 | 航路設定装置、自動操縦装置及び航路設定方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11054263B2 (ja) |
| JP (1) | JP7051390B2 (ja) |
| CN (1) | CN109813326A (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7437129B2 (ja) * | 2019-10-07 | 2024-02-22 | 川崎重工業株式会社 | 操船支援システム |
| KR102130573B1 (ko) * | 2019-11-05 | 2020-07-06 | 한화시스템 주식회사 | 차세대 함정의 통합함교체계 자동화 기능 향상을 위한 위치기반 자동항해 지원 시스템 |
| KR102130570B1 (ko) * | 2019-11-05 | 2020-07-06 | 한화시스템 주식회사 | 차세대 함정의 통합함교체계 자동화 기능 향상을 위한 위치기반 자동항해 지원 시스템의 운영 방법 |
| JP7380844B2 (ja) * | 2020-03-25 | 2023-11-15 | 富士通株式会社 | 経路算出プログラム,情報処理装置及び経路算出方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008513779A (ja) | 2004-09-22 | 2008-05-01 | ケネス リトヴァック, | 航行支援方法およびシステム |
| JP2011179931A (ja) | 2010-02-26 | 2011-09-15 | Aisin Aw Co Ltd | ナビゲーション装置及びナビゲーションプログラム |
| JP2013196033A (ja) | 2012-03-15 | 2013-09-30 | Toyota Motor Corp | 運転支援装置 |
| JP2013217860A (ja) | 2012-04-11 | 2013-10-24 | Furuno Electric Co Ltd | 航路計画装置及び航路計画検証方法 |
| JP2016133854A (ja) | 2015-01-16 | 2016-07-25 | 富士重工業株式会社 | 経由地点設定装置及び経由地点設定プログラム |
| JP2017041071A (ja) | 2015-08-19 | 2017-02-23 | 古野電気株式会社 | 船舶用表示装置 |
| JP2017199004A (ja) | 2017-06-02 | 2017-11-02 | 株式会社 ミックウェア | 地図出力装置、地図出力方法、およびプログラム |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5646856A (en) * | 1989-06-08 | 1997-07-08 | Kaesser; Juergen | Vehicle navigation system |
| TWI220508B (en) | 2003-05-02 | 2004-08-21 | Sin Etke Technology Co Ltd | Easy vehicle navigation method and system |
| US20060089794A1 (en) * | 2004-10-22 | 2006-04-27 | Depasqua Louis | Touch display fishing boat steering system and method |
| CN101319903A (zh) * | 2008-07-15 | 2008-12-10 | 浙江思拓信息工程有限公司 | 船用智能导航监控系统 |
| CN102278986A (zh) * | 2011-06-21 | 2011-12-14 | 海华电子企业(中国)有限公司 | 电子海图航线设计最优化方法 |
| WO2013051046A1 (ja) * | 2011-10-03 | 2013-04-11 | 古野電気株式会社 | タッチパネルを有する装置、レーダ装置、プロッタ装置、舶用ネットワークシステム、情報表示方法及び情報表示プログラム |
| CN103791912A (zh) * | 2012-10-30 | 2014-05-14 | 大陆汽车投资(上海)有限公司 | 支持手绘路径的导航路径规划装置 |
| KR102237225B1 (ko) * | 2015-09-18 | 2021-04-07 | 현대자동차주식회사 | 지오펜스 서비스 방법과 그를 수행하는 네비게이션 단말기, 서버 및 컴퓨터 판독 가능한 기록매체 |
| US10460484B2 (en) * | 2016-06-24 | 2019-10-29 | Navico Holding As | Systems and associated methods for route generation and modification |
| US10024669B2 (en) * | 2016-08-30 | 2018-07-17 | Google Llc | Rerouting in a navigation system based on updated information |
| CN107314774A (zh) * | 2017-08-29 | 2017-11-03 | 努比亚技术有限公司 | 一种地图导航方法、设备及计算机可读存储介质 |
-
2017
- 2017-11-22 JP JP2017224131A patent/JP7051390B2/ja active Active
-
2018
- 2018-11-20 US US16/197,062 patent/US11054263B2/en active Active
- 2018-11-20 CN CN201811381152.5A patent/CN109813326A/zh active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008513779A (ja) | 2004-09-22 | 2008-05-01 | ケネス リトヴァック, | 航行支援方法およびシステム |
| JP2011179931A (ja) | 2010-02-26 | 2011-09-15 | Aisin Aw Co Ltd | ナビゲーション装置及びナビゲーションプログラム |
| JP2013196033A (ja) | 2012-03-15 | 2013-09-30 | Toyota Motor Corp | 運転支援装置 |
| JP2013217860A (ja) | 2012-04-11 | 2013-10-24 | Furuno Electric Co Ltd | 航路計画装置及び航路計画検証方法 |
| JP2016133854A (ja) | 2015-01-16 | 2016-07-25 | 富士重工業株式会社 | 経由地点設定装置及び経由地点設定プログラム |
| JP2017041071A (ja) | 2015-08-19 | 2017-02-23 | 古野電気株式会社 | 船舶用表示装置 |
| JP2017199004A (ja) | 2017-06-02 | 2017-11-02 | 株式会社 ミックウェア | 地図出力装置、地図出力方法、およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109813326A (zh) | 2019-05-28 |
| US20190154450A1 (en) | 2019-05-23 |
| US11054263B2 (en) | 2021-07-06 |
| JP2019095270A (ja) | 2019-06-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7051390B2 (ja) | 航路設定装置、自動操縦装置及び航路設定方法 | |
| EP3516339B1 (en) | Linear visualization of driving route | |
| JP5766076B2 (ja) | 方向距離マーク使用地図表示装置 | |
| JP6335556B2 (ja) | ポインティングによる情報クエリ | |
| US9671935B2 (en) | Information display device, display mode switching method and display mode switching program | |
| US9500485B2 (en) | Device and method for displaying information | |
| US20140152702A1 (en) | Image display device, image display method, image display program, and computer-readable recording medium whereon program is recorded | |
| JP6448804B2 (ja) | 表示制御装置、表示装置および表示制御方法 | |
| JP2006300867A (ja) | ナビゲーション装置 | |
| JP6025814B2 (ja) | 操作装置および自律移動システム | |
| JP2009205462A (ja) | 情報システム | |
| JP2008209151A (ja) | 経路案内装置 | |
| JP2022091891A (ja) | 航路設定装置、自動操縦装置及び航路設定方法 | |
| JP2008191055A (ja) | ナビゲーション装置 | |
| WO2023286825A1 (ja) | 航行支援装置、航行支援方法、プログラム | |
| JP2006330745A (ja) | 電子地図表示装置、電子地図表示方法およびナビゲーション装置 | |
| CN111337027B (zh) | 一种船舶随动操作辅助驾驶方法及系统 | |
| JP2011220746A (ja) | ナビゲーション装置 | |
| CN106796454B (zh) | 用于控制车辆系统的方法、分析装置和车辆 | |
| EP3124915A1 (en) | Method for operating a navigation device | |
| JP6914582B2 (ja) | 地図表示装置及びプログラム | |
| JP2006308346A (ja) | ナビゲーション装置 | |
| JP6329459B2 (ja) | 車載装置 | |
| JP5958582B2 (ja) | 電子機器及びプログラム | |
| JP6313615B2 (ja) | 行き先候補表示方法及び行き先候補表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201118 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210907 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220308 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220330 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7051390 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |