JP6958237B2 - エンコーダースケール、エンコーダースケールの製造方法、エンコーダー、ロボット、電子部品搬送装置、プリンターおよびプロジェクター - Google Patents
エンコーダースケール、エンコーダースケールの製造方法、エンコーダー、ロボット、電子部品搬送装置、プリンターおよびプロジェクター Download PDFInfo
- Publication number
- JP6958237B2 JP6958237B2 JP2017209385A JP2017209385A JP6958237B2 JP 6958237 B2 JP6958237 B2 JP 6958237B2 JP 2017209385 A JP2017209385 A JP 2017209385A JP 2017209385 A JP2017209385 A JP 2017209385A JP 6958237 B2 JP6958237 B2 JP 6958237B2
- Authority
- JP
- Japan
- Prior art keywords
- encoder scale
- region
- encoder
- base material
- light
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34707—Scales; Discs, e.g. fixation, fabrication, compensation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/353—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells influencing the transmission properties of an optical fibre
- G01D5/35338—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells influencing the transmission properties of an optical fibre using other arrangements than interferometer arrangements
- G01D5/35354—Sensor working in reflection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/36—Forming the light into pulses
- G01D5/366—Particular pulse shapes
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optical Transform (AREA)
Description
前記基材の一方の面に設けられ、第1領域と第2領域とが交互に並んでいる光学パターンと、を備え、
前記第1領域は、
前記基材上にパターニングされて配置され、感光性樹脂を含む樹脂層と、
前記樹脂層上に配置された金属膜と、を有し、
前記第1領域の表面は、前記基材の厚さ方向を法線とする第1面を主体に構成され、
前記第2領域の表面は、前記第1面に対して傾斜している第2面を主体に構成されていることを特徴とする。
これにより、結晶材料の結晶面を利用して第2領域の第2面を形成することができる。
前記一方の面上に、感光性樹脂を塗布し、パターニングすることにより樹脂層を形成した後に、前記樹脂層上に金属膜を成膜することにより、前記基材の厚さ方向を法線とする面を主体に構成されている第2領域を形成する工程と、を含むことを特徴とする。
前記エンコーダースケールに向けて光を出射する光出射部と、
前記エンコーダースケールで反射した前記光を検出する光検出部と、を備えることを特徴とする。
このようなロボットによれば、エンコーダースケールの低コスト化を図ることで、ロボットの低コスト化を図ることができる。また、エンコーダースケールを用いた高精度な検出結果に基づいて高精度な動作制御を行うことができる。
まず、本発明のエンコーダースケールの説明に先立ち、本発明のエンコーダー(本発明のエンコーダースケールを備えるエンコーダー)について簡単に説明する。
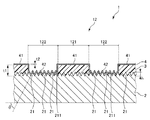
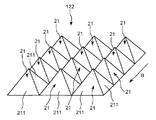
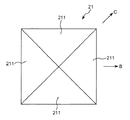
図3は、図2中A−A線断面図(エンコーダースケールの断面図)である。図4は、図3に示す第2領域の一部(複数の凸部)を示す斜視図である。図5は、図3に示す第2領域に設けられている凸部(第2面)の平面図である。図6は、エンコーダースケールの一部の断面を示すSEM写真である。図7は、エンコーダースケールの一部の表面状態を示すSEM写真である。図8は、第2領域の光反射特性(回転角度と受光部での受光量との関係)を示すグラフである。なお、以下では、図3中上側を「上」、下側を「下」という。
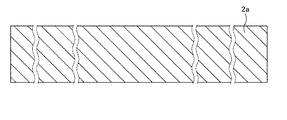
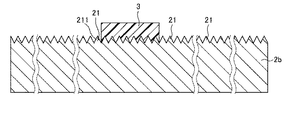
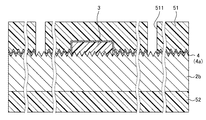
図9は、図3に示すエンコーダースケールの製造方法を説明するためのフローチャートである。図10は、図9に示すエッチング工程における基材準備工程を説明するための断面図である。図11は、図9に示すエッチング工程における異方性エッチング工程を説明するための断面図である。図12は、図9に示す樹脂層形成工程を説明するための断面図である。図13は、図9に示す金属膜形成工程を説明するための断面図である。図14は、図9に示す外形形成工程におけるマスク形成工程を説明するための断面図である。図15は、図9に示す外形形成工程における金属膜切断工程を説明するための断面図である。図16は、図9に示す外形形成工程における基材切断工程を説明するための断面図である。
まず、図10に示すように、(100)単結晶シリコン基板である基材2aを準備する。この基材2aは、単結晶シリコン基板をそのまま用いてもよいが、必要に応じて、単結晶シリコン基板の一方の面を研削して薄肉化した基板を用いる。
次に、図12に示すように、樹脂層3を形成する。より具体的には、基材2bの上面(複数の凸部21を有する面)に、感光前の感光性樹脂を一様に塗布し、露光および現像することで、樹脂層3を形成する。ここで、現像後、必要に応じて、CMP(chemical mechanical polishing)等の平坦化処理を行って、樹脂層3を形成してもよい。
次に、図13に示すように、金属膜4aを形成する。より具体的には、基材2bおよび樹脂層3からなる積層体の樹脂層3側の面に一様にスパッタ法等により金属材料を成膜することで、金属膜4aを形成する。
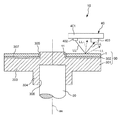
次に、エンコーダースケール1の外形(孔11を含む)を形成する。より具体的には、図14に示すように、基材2b、樹脂層3および金属膜4aからなる積層体の両面にマスク(保護膜)としてレジスト層51、52を形成した後に、図15に示すように、レジスト層51の開口511を介したウェットエッチング等により金属膜4aの一部を除去することで切断し、その後、図16に示すように、開口511を介したドライエッチングにより基材2bの一部を除去することで切断する。その後、図示しないが、レジスト層51、52を除去する。
以上のようにして、エンコーダースケール1を製造することができる。
図17は、本発明の第2実施形態に係るエンコーダースケールを示す断面図である。なお、以下の説明では、本実施形態に関し、前述した実施形態との相違点を中心に説明し、同様の事項に関してはその説明を省略する。
以下、本発明のロボットについて単腕ロボットを例に説明する。
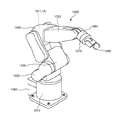
図18に示すロボット1000は、精密機器やこれを構成する部品(対象物)の給材、除材、搬送および組立等の作業を行うことができる。このロボット1000は、6軸ロボットであり、床や天井に固定されるベース1010と、ベース1010に回動自在に連結されたアーム1020と、アーム1020に回動自在に連結されたアーム1030と、アーム1030に回動自在に連結されたアーム1040と、アーム1040に回動自在に連結されたアーム1050と、アーム1050に回動自在に連結されたアーム1060と、アーム1060に回動自在に連結されたアーム1070と、これらアーム1020、1030、1040、1050、1060、1070の駆動を制御する制御部1080と、を有している。また、アーム1070にはハンド接続部が設けられており、ハンド接続部にはロボット1000に実行させる作業に応じたエンドエフェクター1090が装着されている。
次に、本発明の電子部品搬送装置の実施形態について説明する。
図20は、本発明のプリンターの実施形態を示す斜視図である。
図20に示すプリンター3000は、インクジェット記録方式のプリンターである。このプリンター3000は、装置本体3010と、装置本体3010の内部に設けられている印刷機構3020、給紙機構3030および制御部3040と、を備えている。
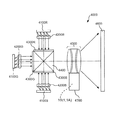
図21は、本発明のプロジェクターの実施形態を示す概略図である。
Claims (12)
- 板状の基材と、
前記基材の一方の面に設けられ、第1領域と第2領域とが交互に並んでいる光学パターンと、を備え、
前記第1領域は、
前記基材上に配置されて、感光性樹脂を含む樹脂層と、
前記樹脂層上に配置された金属膜と、を有し、
前記第1領域の表面は、前記基材の厚さ方向を法線とする第1面を主体に構成され、
前記第2領域の表面は、前記第1面に対して傾斜している第2面を主体に構成されていることを特徴とするエンコーダースケール。 - 前記基材は、異方性エッチングが可能な結晶材料で構成されている請求項1に記載のエンコーダースケール。
- 前記結晶材料は、単結晶シリコンである請求項2に記載のエンコーダースケール。
- 前記単結晶シリコンの面方位が(100)である請求項3に記載のエンコーダースケール。
- 前記第2面は、前記結晶材料の結晶面に沿って設けられている請求項2ないし4のいずれか1項に記載のエンコーダースケール。
- 前記感光性樹脂は、ネガ型である請求項1ないし5のいずれか1項に記載のエンコーダースケール。
- 板状の基材の一方の面に、異方性エッチングを行って、前記基材の厚さ方向を法線とする面に対して傾斜している面を主体に構成されている第1領域を形成する工程と、
前記一方の面上に、感光性樹脂を塗布し、パターニングすることにより樹脂層を形成した後に、前記樹脂層上に金属膜を成膜することにより、前記基材の厚さ方向を法線とする面を主体に構成されている第2領域を形成する工程と、を含むことを特徴とするエンコーダースケールの製造方法。 - 請求項1ないし6のいずれか1項に記載のエンコーダースケールと、
前記エンコーダースケールに向けて光を出射する光出射部と、
前記エンコーダースケールで反射した前記光を検出する光検出部と、を備えることを特徴とするエンコーダー。 - 請求項1ないし6のいずれか1項に記載のエンコーダースケールを備えることを特徴とするロボット。
- 請求項1ないし6のいずれか1項に記載のエンコーダースケールを備えることを特徴とする電子部品搬送装置。
- 請求項1ないし6のいずれか1項に記載のエンコーダースケールを備えることを特徴とするプリンター。
- 請求項1ないし6のいずれか1項に記載のエンコーダースケールを備えることを特徴とするプロジェクター。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017209385A JP6958237B2 (ja) | 2017-10-30 | 2017-10-30 | エンコーダースケール、エンコーダースケールの製造方法、エンコーダー、ロボット、電子部品搬送装置、プリンターおよびプロジェクター |
| CN201811264212.5A CN109724635B (zh) | 2017-10-30 | 2018-10-26 | 编码器标尺、编码器标尺的制造方法以及编码器 |
| US16/173,023 US10955265B2 (en) | 2017-10-30 | 2018-10-29 | Encoder scale, manufacturing method for encoder scale, and encoder |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017209385A JP6958237B2 (ja) | 2017-10-30 | 2017-10-30 | エンコーダースケール、エンコーダースケールの製造方法、エンコーダー、ロボット、電子部品搬送装置、プリンターおよびプロジェクター |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019082376A JP2019082376A (ja) | 2019-05-30 |
| JP2019082376A5 JP2019082376A5 (ja) | 2020-12-10 |
| JP6958237B2 true JP6958237B2 (ja) | 2021-11-02 |
Family
ID=66242839
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017209385A Expired - Fee Related JP6958237B2 (ja) | 2017-10-30 | 2017-10-30 | エンコーダースケール、エンコーダースケールの製造方法、エンコーダー、ロボット、電子部品搬送装置、プリンターおよびプロジェクター |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10955265B2 (ja) |
| JP (1) | JP6958237B2 (ja) |
| CN (1) | CN109724635B (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3399284B1 (de) * | 2017-05-03 | 2019-07-10 | Dr. Johannes Heidenhain GmbH | Sensoreinheit zur positionsmessung |
| CN114450553A (zh) * | 2020-03-31 | 2022-05-06 | 大日本印刷株式会社 | 编码器用反射型光学标尺和反射型光学式编码器 |
| JP7565179B2 (ja) * | 2020-09-14 | 2024-10-10 | 株式会社ミツトヨ | スケール |
| CN116507885A (zh) * | 2020-11-06 | 2023-07-28 | 松下知识产权经营株式会社 | 编码器 |
| WO2023035476A1 (zh) * | 2021-09-09 | 2023-03-16 | 深圳市汇顶科技股份有限公司 | 光学编码器及电子设备 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04211202A (ja) * | 1990-03-19 | 1992-08-03 | Canon Inc | 反射型回折格子および該回折格子を用いた装置 |
| US5916735A (en) * | 1996-11-21 | 1999-06-29 | Matsushita Electric Industrial Co., Ltd. | Method for manufacturing fine pattern |
| DE19937023A1 (de) * | 1999-08-05 | 2001-02-08 | Heidenhain Gmbh Dr Johannes | Reflexions-Maßverkörperung und Verfahren zur Herstellung einer Reflexions-Maßverkörperung |
| DE10150099A1 (de) * | 2001-10-11 | 2003-04-17 | Heidenhain Gmbh Dr Johannes | Verfahren zur Herstellung eines Maßstabes, sowie derart hergestellter Maßstab und eine Positionsmesseinrichtung |
| US20040175843A1 (en) * | 2003-03-04 | 2004-09-09 | Roitman Daniel B. | Near-field and far-field encoding and shaping of microbeads for bioassays |
| JP5240198B2 (ja) * | 2007-09-05 | 2013-07-17 | 株式会社ニコン | 光学式エンコーダ用反射板およびその製造方法、ならびに光学式エンコーダ |
| JP5562152B2 (ja) * | 2010-07-12 | 2014-07-30 | Dmg森精機株式会社 | 回折格子 |
| KR101856231B1 (ko) * | 2011-12-19 | 2018-05-10 | 엘지이노텍 주식회사 | 나노패턴을 구비한 투명기판 및 그 제조방법 |
| JP5420715B2 (ja) * | 2012-05-28 | 2014-02-19 | オリンパス株式会社 | 反射型光学式エンコーダー |
| JP6079122B2 (ja) * | 2012-10-12 | 2017-02-15 | 日立金属株式会社 | 光基板、光基板の製造方法、及び光モジュール構造 |
| JP6253929B2 (ja) * | 2013-09-11 | 2017-12-27 | 株式会社オプトニクス精密 | 反射型エンコーダ装置 |
-
2017
- 2017-10-30 JP JP2017209385A patent/JP6958237B2/ja not_active Expired - Fee Related
-
2018
- 2018-10-26 CN CN201811264212.5A patent/CN109724635B/zh active Active
- 2018-10-29 US US16/173,023 patent/US10955265B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN109724635B (zh) | 2022-04-15 |
| JP2019082376A (ja) | 2019-05-30 |
| CN109724635A (zh) | 2019-05-07 |
| US10955265B2 (en) | 2021-03-23 |
| US20190128706A1 (en) | 2019-05-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6958237B2 (ja) | エンコーダースケール、エンコーダースケールの製造方法、エンコーダー、ロボット、電子部品搬送装置、プリンターおよびプロジェクター | |
| JP6414308B2 (ja) | パターン形成装置 | |
| JP4408351B2 (ja) | アライメント装置 | |
| JP2013026288A (ja) | インプリント装置および物品の製造方法 | |
| JP2018191437A (ja) | 圧電駆動装置、電子部品搬送装置、ロボット、プロジェクターおよびプリンター | |
| US10782160B2 (en) | Encoder scale, method for manufacturing encoder scale, encoder, robot, and printer | |
| JP2019095316A (ja) | エンコーダースケール、エンコーダースケールの製造方法、エンコーダー、ロボット、プリンターおよびプロジェクター | |
| KR20250165254A (ko) | 반송 장치, 평탄화 장치 및 물품 제조 방법 | |
| JP6680330B2 (ja) | パターン形成装置 | |
| US9217937B2 (en) | Interferometric measurement of rotation of stage apparatus and adjustment method thereof, exposure apparatus and method of manufacturing device | |
| JP2019146364A (ja) | 圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクター | |
| JP6413784B2 (ja) | 基板処理装置及びデバイス製造方法 | |
| JP6114861B2 (ja) | インプリント装置、インプリント方法および物品製造方法 | |
| JP6748428B2 (ja) | リソグラフィ装置、物品の製造方法、ステージ装置及び計測装置 | |
| JP7422458B2 (ja) | 異物検査装置、異物検査方法、処理装置および物品製造方法 | |
| US20190128707A1 (en) | Optical Scale, Encoder, Robot, Electronic-Component Conveying Apparatus, Printer, And Projector | |
| TWI898453B (zh) | 貼合基板之位置偏移量測定裝置及其方法以及半導體製造裝置 | |
| US20240178042A1 (en) | Systems, devices, and methods for registering a superstrate of an imprint tool | |
| JP6996580B2 (ja) | 基板処理方法 | |
| JP4497364B2 (ja) | 近接露光における位置合わせ方法と位置合わせ装置 | |
| JP4335781B2 (ja) | 露光装置および露光方法 | |
| JP2015031883A (ja) | パターン形成装置及びパターン形成方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201029 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201029 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210826 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210907 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210920 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6958237 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |