JP6947622B2 - コンバイン - Google Patents
コンバイン Download PDFInfo
- Publication number
- JP6947622B2 JP6947622B2 JP2017242092A JP2017242092A JP6947622B2 JP 6947622 B2 JP6947622 B2 JP 6947622B2 JP 2017242092 A JP2017242092 A JP 2017242092A JP 2017242092 A JP2017242092 A JP 2017242092A JP 6947622 B2 JP6947622 B2 JP 6947622B2
- Authority
- JP
- Japan
- Prior art keywords
- straw
- frame
- cutting device
- swing
- working position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
































Description
刈取穀稈を挟持搬送するフィードチェーンと、
扱胴を有すると共に前記フィードチェーンによって搬送される刈取穀稈を脱穀処理する脱穀装置と、
前記脱穀装置の後側に連設されると共に前記フィードチェーンから脱穀処理後の排藁を受け取って後方へ挟持搬送する排藁搬送装置と、
前記排藁搬送装置の搬送終端側部位の下方に設けられると共に前記排藁搬送装置によって搬送された排藁を切断処理する排藁切断装置と、が備えられたコンバインであって、
前記排藁切断装置は、左右一端部側で上下方向に延びる揺動軸心周りにおいて、前記排藁搬送装置の搬送終端側部位の下方に位置する作業位置と、前記排藁搬送装置の搬送終端側部位の下方から離れて位置する非作業位置とに亘って揺動可能であり、
前記排藁搬送装置を平面視で前記排藁搬送装置の搬送終端側ほど機体左右方向の一方側に位置するように傾斜する状態で支持すると共に機体左右方向の前記一方側で機体前後方向に延びる揺動軸心周りで上下揺動可能な排藁フレームが備えられ、
前記排藁フレームの上昇位置として、少なくとも、前記排藁フレームの上昇限界である第一上昇位置と、前記第一上昇位置よりも低い位置であり、前記排藁搬送装置の詰り除去を行うことが可能な位置である第二上昇位置と、が設定され、
前記排藁フレームが前記第二上昇位置まで上昇している状態では、前記排藁切断装置を前記作業位置と前記非作業位置とに切り替え可能であり、
前記排藁フレームが前記第一上昇位置まで上昇している状態では、前記排藁切断装置を前記作業位置と前記非作業位置とに切り替え不可能であることにある。
前記排藁切断装置の前記作業位置から前記非作業位置側への揺動と、前記排藁切断装置の前記非作業位置から前記作業位置側への揺動とを規制するロック機構が備えられていると好適である。
前記排藁フレームの上昇に連動して前記ロック機構が前記排藁切断装置の揺動を規制するように、前記排藁フレームの上昇動作に前記ロック機構の規制動作を連動させる連動機構が備えられていると好適である。
前記ロック機構は、前記排藁切断装置の揺動を規制する状態において、前記排藁切断装置が一定角度範囲だけ揺動するのを許容すると好適である。
前記排藁切断装置の揺動角度を検出する角度検出センサが備えられ、
前記角度検出センサは、前記排藁切断装置を揺動可能に支持する支持部に設けられていると好適である。
前記角度検出センサが取り付けられるブラケットが備えられ、
前記角度検出センサは、揺動式の検出アームを有し、
前記ブラケットに、前記検出アームが初期位置から検出範囲外に揺動しないように前記検出アームの揺動を阻止するストッパが設けられていると好適である。
前記排藁フレームが前記第一上昇位置まで上昇している状態において、前記排藁切断装置を前記作業位置と前記非作業位置とに切り替えようとすると警報を発する警報部が備えられていると好適である。
図1及び図2には、自脱型コンバインを示している。本コンバインは、機体フレーム1と、機体フレーム1を支持する走行装置2と、を備えている。機体の前部における右側には、運転キャビン3が設けられている。運転キャビン3は、運転者が搭乗する運転部4と、運転部4を覆うキャビン5と、を備えている。運転部4の下方には、エンジン(図示省略)が設けられている。
図3に示すように、脱穀装置10の上部には、扱室17が形成されている。扱室17には、扱胴11が設けられている。扱胴11は、機体前後方向に延びる回転軸心Y1周りで回転可能である。扱胴11の下方には、受網18が設けられている。扱室17の後方には、塵埃を外部に排出する排塵ファン19が設けられている。
図6及び図7に示すように、排藁搬送装置12は、平面視で排藁搬送装置12の搬送終端側ほど機体左右方向の一方側(右側)に位置するように傾斜する状態で排藁フレーム55に支持されている。排藁搬送装置12は、排藁の株元側を挟持搬送する株元搬送装置49と、排藁の穂先側を係止搬送する穂先搬送装置50と、を備えている。株元搬送装置49は、突起51a付きの排藁チェーン51と、排藁レール52と、を備えている。排藁レール52は、排藁チェーン51の下方において、排藁チェーン51の下側経路に対向する状態で配置されている。株元搬送装置49の搬送終端部には、排藁チェーン51を案内する一対のガイド板53が設けられている。穂先搬送装置50は、タイン54a付きの排藁穂先チェーン54を備えている。
図6から図14に示すように、排藁フレーム55は、排藁搬送装置12を平面視で排藁搬送装置12の搬送終端側ほど機体左右方向の一方側(右側)に位置するように傾斜する状態で支持すると共に機体左右方向の一方側(右側)で機体前後方向に延びる揺動軸心Y2周りで上下揺動可能である。排藁搬送装置12は、排藁フレーム55から取り外し可能であり、前ステー56及び後ステー57を介して排藁フレーム55に吊り下げ支持されている。
図9から図14に示すように、排藁フレーム55が下降位置に位置する状態で、排藁フレーム55の基端側部位を右側の前後向きフレーム40Rに位置保持する内側ロック機構93が設けられている。内側ロック機構93は、内側フック94と、内側フックピン95と、を備えている。内側フック94は、基端フレーム部71に支持されている。内側フックピン95は、右側の前後向きフレーム40Rに支持されている。
図6から図10及び図13に示すように、扱胴フレーム44が下降位置に位置する状態で、左側の前後向きフレーム40Lを後部フレーム41に位置保持する外側ロック機構96が設けられている。外側ロック機構96は、外側フック97と、外側フックピン98と、を備えている。外側フック97は、左側の前後向きフレーム40Lに支持されている。外側フックピン98は、後部フレーム41に支持されている。
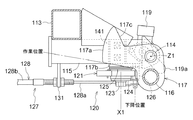
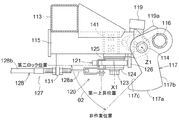
図6、図15から図18に示すように、排藁切断装置28は、揺動軸心Z1周りで揺動可能なように、支柱113に支持されている。支柱113には、上下一対の支軸114が設けられている。支柱113には、支軸114を支持する支持部115が設けられている。
図6、図15から図18に示すように、排藁切断装置28の作業位置から非作業位置側への揺動と、排藁切断装置28の非作業位置から作業位置側への揺動とを規制するロック機構120が設けられている。ロック機構120は、排藁切断装置28の揺動を規制しない非規制状態と、排藁切断装置28の揺動を規制する規制状態とに切り替え可能である。ロック機構120は、プレート117と、カム121と、を備えている。
図30に示すように、制御ブロックには、制御装置132と、シリンダ45と、モータM1と、モータM2と、警報部133と、シリンダ45を操作する昇降スイッチ134と、モータM1を操作する切り替えスイッチ135と、排藁切断装置28の揺動軸心Z1周りの揺動角度を検出する角度検出センサ119と、排藁フレーム55の揺動軸心Y2周りの揺動角度を検出する角度検出センサ136と、が含まれている。
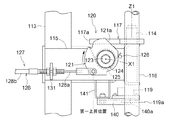
図16に示すように、角度検出センサ119が取り付けられるブラケット140が設けられている。ブラケット140は、ステー141にボルト固定されている。ステー141は、上側の支持部115の下部に固定されている。すなわち、角度検出センサ119は、排藁切断装置28を揺動可能に支持する上側の支持部115に設けられている。ブラケット140には、検出アーム119aが初期位置から検出範囲外に揺動しないように検出アーム119aの揺動を阻止するストッパ140aが設けられている。検出アーム119aは、初期位置でストッパ140aに接触し、ストッパ140aによって初期位置から検出範囲外に揺動しないように揺動が阻止される。
(1)上記実施形態では、排藁切断装置28用の「ロック機構」として、機械式のロック機構が採用されているが、例えば、排藁切断装置28がモータによって作業位置と非作業位置とに切り替えられるように構成されている場合、排藁切断装置28用の「ロック機構」として、制御装置132によるロック機構が採用されていてもよい。
10 脱穀装置
11 扱胴
12 排藁搬送装置
28 排藁切断装置
55 排藁フレーム
115 支持部
119 角度検出センサ
119a 検出アーム
120 ロック機構
127 連動機構
133 警報部
140 ブラケット
140a ストッパ
Y2 揺動軸心
Z1 揺動軸心
θ1 第一許容角度
θ2 第二許容角度
Claims (7)
- 刈取穀稈を挟持搬送するフィードチェーンと、
扱胴を有すると共に前記フィードチェーンによって搬送される刈取穀稈を脱穀処理する脱穀装置と、
前記脱穀装置の後側に連設されると共に前記フィードチェーンから脱穀処理後の排藁を受け取って後方へ挟持搬送する排藁搬送装置と、
前記排藁搬送装置の搬送終端側部位の下方に設けられると共に前記排藁搬送装置によって搬送された排藁を切断処理する排藁切断装置と、が備えられたコンバインであって、
前記排藁切断装置は、左右一端部側で上下方向に延びる揺動軸心周りにおいて、前記排藁搬送装置の搬送終端側部位の下方に位置する作業位置と、前記排藁搬送装置の搬送終端側部位の下方から離れて位置する非作業位置とに亘って揺動可能であり、
前記排藁搬送装置を平面視で前記排藁搬送装置の搬送終端側ほど機体左右方向の一方側に位置するように傾斜する状態で支持すると共に機体左右方向の前記一方側で機体前後方向に延びる揺動軸心周りで上下揺動可能な排藁フレームが備えられ、
前記排藁フレームの上昇位置として、少なくとも、前記排藁フレームの上昇限界である第一上昇位置と、前記第一上昇位置よりも低い位置であり、前記排藁搬送装置の詰り除去を行うことが可能な位置である第二上昇位置と、が設定され、
前記排藁フレームが前記第二上昇位置まで上昇している状態では、前記排藁切断装置を前記作業位置と前記非作業位置とに切り替え可能であり、
前記排藁フレームが前記第一上昇位置まで上昇している状態では、前記排藁切断装置を前記作業位置と前記非作業位置とに切り替え不可能であるコンバイン。 - 前記排藁切断装置の前記作業位置から前記非作業位置側への揺動と、前記排藁切断装置の前記非作業位置から前記作業位置側への揺動とを規制するロック機構が備えられている請求項1に記載のコンバイン。
- 前記排藁フレームの上昇に連動して前記ロック機構が前記排藁切断装置の揺動を規制するように、前記排藁フレームの上昇動作に前記ロック機構の規制動作を連動させる連動機構が備えられている請求項2に記載のコンバイン。
- 前記ロック機構は、前記排藁切断装置の揺動を規制する状態において、前記排藁切断装置が一定角度範囲だけ揺動するのを許容する請求項2又は3に記載のコンバイン。
- 前記排藁切断装置の揺動角度を検出する角度検出センサが備えられ、
前記角度検出センサは、前記排藁切断装置を揺動可能に支持する支持部に設けられている請求項1から4の何れか一項に記載のコンバイン。 - 前記角度検出センサが取り付けられるブラケットが備えられ、
前記角度検出センサは、揺動式の検出アームを有し、
前記ブラケットに、前記検出アームが初期位置から検出範囲外に揺動しないように前記検出アームの揺動を阻止するストッパが設けられている請求項5に記載のコンバイン。 - 前記排藁フレームが前記第一上昇位置まで上昇している状態において、前記排藁切断装置を前記作業位置と前記非作業位置とに切り替えようとすると警報を発する警報部が備えられている請求項1から6の何れか一項に記載のコンバイン。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017242092A JP6947622B2 (ja) | 2017-12-18 | 2017-12-18 | コンバイン |
| KR1020180156603A KR20190073271A (ko) | 2017-12-18 | 2018-12-07 | 콤바인 및 배출 짚 절단 장치 |
| CN201811552772.0A CN109923997B (zh) | 2017-12-18 | 2018-12-18 | 联合收割机以及排秆切割装置 |
| JP2021151263A JP7262543B2 (ja) | 2017-12-18 | 2021-09-16 | コンバイン |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017242092A JP6947622B2 (ja) | 2017-12-18 | 2017-12-18 | コンバイン |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021151263A Division JP7262543B2 (ja) | 2017-12-18 | 2021-09-16 | コンバイン |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019106931A JP2019106931A (ja) | 2019-07-04 |
| JP6947622B2 true JP6947622B2 (ja) | 2021-10-13 |
Family
ID=67178024
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017242092A Active JP6947622B2 (ja) | 2017-12-18 | 2017-12-18 | コンバイン |
| JP2021151263A Active JP7262543B2 (ja) | 2017-12-18 | 2021-09-16 | コンバイン |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021151263A Active JP7262543B2 (ja) | 2017-12-18 | 2021-09-16 | コンバイン |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP6947622B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6983130B2 (ja) * | 2018-09-21 | 2021-12-17 | 株式会社クボタ | コンバイン |
| CN114679967B (zh) * | 2022-03-24 | 2024-01-26 | 安徽禾吉循环经济园有限公司 | 农作物秸秆切割洗选机 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4669489A (en) * | 1985-12-02 | 1987-06-02 | Deere & Company | Straw chopper mounting for a combine |
| JPS6485011A (en) * | 1987-09-24 | 1989-03-30 | Iseki Agricult Mach | Waste stalk cutter |
| JP3044932B2 (ja) * | 1992-07-23 | 2000-05-22 | 井関農機株式会社 | 脱穀機 |
| JP3145004B2 (ja) * | 1995-02-28 | 2001-03-12 | 三菱農機株式会社 | コンバインにおける排藁処理装置 |
| JPH099777A (ja) * | 1995-06-28 | 1997-01-14 | Mitsubishi Agricult Mach Co Ltd | 脱穀機における排藁搬送装置 |
| JPH104768A (ja) * | 1996-06-17 | 1998-01-13 | Mitsubishi Agricult Mach Co Ltd | 脱穀機の排ワラ装置 |
| JP3410616B2 (ja) * | 1996-10-03 | 2003-05-26 | 三菱農機株式会社 | コンバイン |
| JP2001204241A (ja) * | 2000-01-25 | 2001-07-31 | Mitsubishi Agricult Mach Co Ltd | 脱穀機 |
| JP2003304729A (ja) * | 2002-04-17 | 2003-10-28 | Atex Co Ltd | 排稈カッターの排稈案内装置 |
| JP5016396B2 (ja) * | 2007-06-08 | 2012-09-05 | 株式会社クボタ | 排ワラ処理構造 |
| JP2009232819A (ja) * | 2008-03-28 | 2009-10-15 | Mitsubishi Agricult Mach Co Ltd | コンバイン |
-
2017
- 2017-12-18 JP JP2017242092A patent/JP6947622B2/ja active Active
-
2021
- 2021-09-16 JP JP2021151263A patent/JP7262543B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP7262543B2 (ja) | 2023-04-21 |
| JP2021184776A (ja) | 2021-12-09 |
| JP2019106931A (ja) | 2019-07-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2021184776A (ja) | コンバイン | |
| JP2021184776A5 (ja) | ||
| JP2021097691A (ja) | コンバイン | |
| CN112888304B (zh) | 联合收割机 | |
| JP6847025B2 (ja) | コンバイン | |
| JP6693862B2 (ja) | コンバイン | |
| JP6914310B2 (ja) | コンバイン | |
| JP6922029B2 (ja) | コンバイン | |
| JP6983130B2 (ja) | コンバイン | |
| JP6833624B2 (ja) | コンバイン | |
| JP6721541B2 (ja) | コンバイン | |
| CN109923997B (zh) | 联合收割机以及排秆切割装置 | |
| KR20180073463A (ko) | 콤바인 | |
| JP7026733B2 (ja) | コンバイン | |
| JP6073057B2 (ja) | コンバインの穀粒排出構造 | |
| JP7069250B2 (ja) | コンバイン | |
| JP6858651B2 (ja) | コンバイン | |
| JP2013183677A (ja) | コンバイン | |
| JPWO2007148719A1 (ja) | コンバイン | |
| JP6999539B2 (ja) | 収穫機 | |
| JP2013123415A (ja) | コンバインの穀粒排出構造 | |
| JP6980629B2 (ja) | コンバイン | |
| JP4565571B2 (ja) | コンバイン | |
| JP2023123834A (ja) | コンバイン | |
| JP2021065241A (ja) | コンバイン |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191225 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210202 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210402 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210817 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210916 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6947622 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |