JP6911645B2 - 物理量センサー、物理量センサーの製造方法、複合センサー、慣性計測ユニット、携帯型電子機器、電子機器及び移動体 - Google Patents
物理量センサー、物理量センサーの製造方法、複合センサー、慣性計測ユニット、携帯型電子機器、電子機器及び移動体 Download PDFInfo
- Publication number
- JP6911645B2 JP6911645B2 JP2017165161A JP2017165161A JP6911645B2 JP 6911645 B2 JP6911645 B2 JP 6911645B2 JP 2017165161 A JP2017165161 A JP 2017165161A JP 2017165161 A JP2017165161 A JP 2017165161A JP 6911645 B2 JP6911645 B2 JP 6911645B2
- Authority
- JP
- Japan
- Prior art keywords
- movable body
- physical quantity
- quantity sensor
- support substrate
- protrusion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5642—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating bars or beams
- G01C19/5656—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating bars or beams the devices involving a micromechanical structure
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/0802—Details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/125—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by capacitive pick-up
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B3/00—Devices comprising flexible or deformable elements, e.g. comprising elastic tongues or membranes
- B81B3/0018—Structures acting upon the moving or flexible element for transforming energy into mechanical movement or vice versa, i.e. actuators, sensors, generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B5/00—Devices comprising elements which are movable in relation to each other, e.g. comprising slidable or rotatable elements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5607—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating tuning forks
- G01C19/5628—Manufacturing; Trimming; Mounting; Housings
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5642—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating bars or beams
- G01C19/5663—Manufacturing; Trimming; Mounting; Housings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B2201/00—Specific applications of microelectromechanical systems
- B81B2201/02—Sensors
- B81B2201/0228—Inertial sensors
- B81B2201/0235—Accelerometers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B2203/00—Basic microelectromechanical structures
- B81B2203/04—Electrodes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0805—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration
- G01P2015/0822—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass
- G01P2015/0825—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass for one single degree of freedom of movement of the mass
- G01P2015/0831—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass for one single degree of freedom of movement of the mass the mass being of the paddle type having the pivot axis between the longitudinal ends of the mass, e.g. see-saw configuration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0862—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with particular means being integrated into a MEMS accelerometer structure for providing particular additional functionalities to those of a spring mass system
- G01P2015/0871—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with particular means being integrated into a MEMS accelerometer structure for providing particular additional functionalities to those of a spring mass system using stopper structures for limiting the travel of the seismic mass
Description
また、図1から図6及び図8から図14では、説明の便宜上、互いに直交する、X軸、Y軸及びZ軸の3軸を図示しており、軸方向を図示した矢印の先端側を「+側」、基端側を「−側」としている。また、以下では、X軸に平行な方向を「X軸方向」、Y軸に平行な方向を「Y軸方向」、Z軸に平行な方向を「Z軸方向」という。
<物理量センサーの構成>
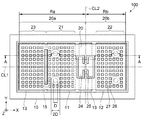
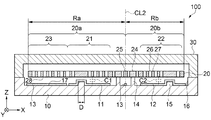
図1は、実施形態に係る物理量センサーを模式的に示す平面図である。図2は、図1におけるA−A線での断面図である。まず、実施形態に係る物理量センサー100の概略構成について、図1及び図2を参照して説明する。なお、図1においては、説明の便宜上、蓋体30の図示を省略している。
可動体20は、一様の厚さ(Z軸方向の寸法)を有する平板状の長方形をなしている。第1可動体20aは質量m1を有し、その重心G1は支持部24に回転可能に支持されている梁部25の中心Qから−X軸方向の距離r1に位置している。第2可動体20bは質量m2を有し、その重心G2は梁部25の中心Qから+X軸方向の距離r2に位置している。第1可動体20aは、第3質量部23を有し、第2可動体20bよりもX軸方向に長い長方形の形状をなしている。このため、第1可動体20aの質量m1は第2可動体20bの質量m2よりも重く、第1可動体20aの重心G1の位置する距離r1は、第2可動体20bの重心G2の位置する距離r2よりも長い。
物理量センサー100に対して、+Z軸方向から−Z軸方向に向かう加速度αdが加わると、第1可動体20aには、質量m1と、加速度αdと、距離r1との積に相当する第1回転モーメントNd1が、梁部25の中心Qを回転軸として時計回りの方向に作用する。他方、第2可動体20bには、質量m2と、加速度αdと、距離r2との積に相当する第2回転モーメントNd2が、梁部25の中心Qを回転軸として反時計回りの方向に作用する。第1可動体20aの質量m1は第2可動体20bの質量m2よりも重く、第1可動体20aの重心G1の位置する距離r1は、第2可動体20bの重心G2の位置する距離r2よりも長いため、第1可動体20aに作用する第1回転モーメントNd1は、第2可動体20bに作用する第2回転モーメントNd2よりも、大きい。
図7は、物理量センサーの製造工程を説明するフローチャート図である。図8〜図12は、物理量センサーの各製造工程における断面図である。次に、物理量センサー100の製造方法について図7から図12を参照して説明する。
物理量センサー100は、支持基板10上から可動体20側に突出する突起15を有している。また、可動体20には、平板面28を貫通する複数の開口26が設けられている。突起15は、支持基板10を平板面28に対して垂直方向に見たときにおいて、支持基板10の可動体20と間隔を隔てて重なっている領域に設けられている。開口26は、支持基板10を平板面28に対して垂直方向に見たときにおいて、突起15の最大外形寸法をDとした時、突起15の中心から2Dの範囲を除く領域に設けられている。換言すると、開口26は、突起15の中心から2Dの範囲、すなわち突起15と接触する位置には設けられていない。これにより、当該領域の剛性が向上するので、可動体20と突起15とが接触した場合に、可動体20が損傷することを抑制することができる。また、可動体20の受けるダンピングは、突起15の中心から2Dを除く範囲に設けられた複数の開口26によって低減されるので、物理量センサー100の検出感度が向上する。したがって、信頼性と検出感度とを向上させた物理量センサー100を提供することができる。
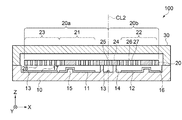
図13は、変形例に係る物理量センサーを模式的に示す平面図である。図14は、図13におけるB−B線での断面図である。以下、変形例1に係る物理量センサー200について説明する。なお、実施形態と同一の構成部位については、同一の符号を使用し、重複する説明は省略する。本変形例の物理量センサー200は、実施形態で説明した物理量センサー100と突起215の位置が異なっている。
次に、図15を参照して、前述の物理量センサー100,200を備えた複合センサーの構成例について説明する。図15は、複合センサーの概略構成を示す機能ブロック図である。なお、以下では、物理量センサー100を用いた例を示して説明する。
次に、図16および図17を参照して、慣性計測ユニット(IMU:Inertial Measurement Unit)について説明する。図16は、慣性計測ユニットの概略構成を示す分解斜視図である。図17は、慣性計測ユニットの慣性センサー素子の配置例を示す斜視図である。なお、以下では、物理量センサー100を用いた例を示して説明する。
次に、物理量センサー100,200を用いた携帯型電子機器について、図18および図19に基づき、詳細に説明する。なお、以下では、物理量センサー100を用いた例を示して説明する。以下、携帯型電子機器の一例として、腕時計型の活動計(アクティブトラッカー)を示して説明する。
1.距離:高精度のGPS機能により計測開始からの合計距離を計測する。
2.ペース:ペース距離計測から、現在の走行ペースを表示する。
3.平均スピード:平均スピード走行開始から現在までの平均スピードを算出し表示する。
4.標高:GPS機能により、標高を計測し表示する。
5.ストライド:GPS電波が届かないトンネル内などでも歩幅を計測し表示する。
6.ピッチ:1分あたりの歩数を計測し表示する。
7.心拍数:脈拍センサーにより心拍数を計測し表示する。
8.勾配:山間部でのトレーニングやトレイルランにおいて、地面の勾配を計測し表示する。
9.オートラップ:事前に設定した一定距離や一定時間を走った時に、自動でラップ計測を行う。
10.運動消費カロリー:消費カロリーを表示する。
11.歩数:運動開始からの歩数の合計を表示する。
次に、本発明の実施形態に係る物理量センサー100,200を備えた電子機器について図20から図22を参照して説明する。なお、以下では、物理量センサー100を用いた例を示して説明する。
デジタルスチルカメラ1300におけるケース(ボディー)1302の背面には、表示部1000が設けられ、CCDによる撮像信号に基づいて表示を行う構成になっており、表示部1000は、被写体を電子画像として表示するファインダーとして機能する。また、ケース1302の正面側(図中裏面側)には、光学レンズ(撮像光学系)やCCD等を含む受光ユニット1304が設けられている。
撮影者が表示部1000に表示された被写体像を確認し、シャッターボタン1306を押下すると、その時点におけるCCDの撮像信号が、メモリー1308に転送・格納される。また、このデジタルスチルカメラ1300においては、ケース1302の側面に、ビデオ信号出力端子1312と、データ通信用の入出力端子1314とが設けられている。そして、図示されるように、ビデオ信号出力端子1312にはテレビモニター1430が、データ通信用の入出力端子1314にはパーソナルコンピューター1440が、それぞれ必要に応じて接続される。さらに、所定の操作により、メモリー1308に格納された撮像信号が、テレビモニター1430や、パーソナルコンピューター1440に出力される構成になっている。このようなデジタルスチルカメラ1300には、加速度センサーなどとして機能する物理量センサー100が内蔵されており、物理量センサー100からの検出信号に基づいて制御部(不図示)が、例えば手振れ補正などの制御を行なうことができる。
次に、本発明の実施形態に係る物理量センサー100,200を備えた移動体について図23を参照して説明する。なお、以下では、物理量センサー100を用いた例を示して説明する。
図23は、本発明の実施形態に係る物理量センサーを備える移動体としての自動車を概略的に示す斜視図である。自動車1500には実施形態に係る物理量センサー100が搭載されている。例えば、図23に示すように、移動体としての自動車1500には、物理量センサー100を内蔵してタイヤなどを制御する制御部としての電子制御ユニット1510が車体に搭載されている。また、物理量センサー100は、他にもキーレスエントリー、イモビライザー、カーナビゲーションシステム、カーエアコン、アンチロックブレーキシステム(ABS)、エアバック、タイヤ・プレッシャー・モニタリング・システム(TPMS:Tire Pressure Monitoring System)、エンジンコントロール、ハイブリッド自動車や電気自動車の電池モニター、車体姿勢制御システム、等の電子制御ユニット(ECU:Electronic Control Unit)に広く適用できる。
Claims (11)
- 平板状であり、当該平板状の平板面を貫通する方向に複数の開口を有し、回転軸を中心
に揺動可能な可動体と、
前記可動体の前記平板面と間隙を隔てて支持するために、前記平板面の一部と支柱で連
結されてなる支持基板と、
前記支持基板を前記平板面に対して垂直方向に見たときにおいて、前記支持基板の前記
可動体と間隙を隔てて重なっている領域に、前記可動体側に突出して設けられる突起と、
を含み、
前記支持基板を前記平板面に対して垂直方向に見たときにおいて、前記突起の最大外形
寸法をDとした時、前記開口は、前記突起の外周から外側に向かってD/2の範囲を除く
領域に設けられていることで、前記可動体は前記開口が設けられていない領域を有し、
前記突起が前記回転軸に関して線対称に設けられていることで、前記開口が設けられて
いない領域は前記回転軸に関して線対称に設けれてなることを特徴とする物理量センサー
。 - 前記突起は、複数設けられていることを特徴とする請求項1に記載の物理量センサー。
- 前記突起は、前記回転軸の軸方向における前記可動体を2等分する中心線に対して対称
に設けられていることを特徴とする請求項1又は請求項2に記載の物理量センサー。 - 前記突起は、前記回転軸の軸方向と交差する方向において、前記回転軸と前記可動体の
端部との間隔の1/2以内に設けられていることを特徴とする請求項1から請求項3のい
ずれか一項に記載の物理量センサー。 - 回転軸を中心に揺動可能な可動体と、
前記可動体を貫通する方向に設けられた複数の開口と、
前記可動体の一部と支柱で連結されてなる支持基板と、
前記支持基板の前記可動体と間隙を隔てて重なっている領域に、前記可動体側に突出し
て設けられる突起と、
を含み、
前記突起の最大外形寸法をDとした時、前記突起の外周から外側に向かってD/2の範
囲を除く領域に前記複数の開口が設けられていることで、前記可動体は前記開口が設けら
れていない領域を有し、
前記突起が前記回転軸に関して線対称に設けられていることで、前記開口が設けられて
いない領域は前記回転軸に関して線対称に設けれてなることを特徴とする物理量センサー
。 - 平板状であり、当該平板状の平板面を貫通する方向に複数の開口を有し、回転軸を中心
に揺動可能な可動体と、前記可動体の前記平板面と間隙を隔てて支持するために、前記平
板面の一部と支柱で連結されてなる支持基板と、前記支持基板を前記平板面に対して垂直
方向に見たときにおいて、前記支持基板の前記可動体と間隙を隔てて重なっている領域に
、前記可動体側に突出して設けられる突起と、を含み、前記支持基板を前記平板面に対し
て垂直方向に見たときにおいて、前記突起の最大外形寸法をDとした時、前記開口は、前
記突起の外周から外側に向かってD/2の範囲を除く領域に設けられていることで、前記
可動体は前記開口が設けられていない領域を有し、前記突起が前記回転軸に関して線対称
に設けられていることで、前記開口が設けられていない領域は前記回転軸に関して線対称
に設けれてなる物理量センサーの製造方法であって、
前記支持基板及び前記突起を形成する支持基板形成工程、
前記支持基板とシリコン基板とを接合する基板接合工程、
前記シリコン基板から前記開口を有する前記可動体を形成する可動体形成工程、
を含むことを特徴とする物理量センサーの製造方法。 - 請求項1から請求項5のいずれか一項に記載の物理量センサーと、
角速度センサーと、
を備えることを特徴とする複合センサー。 - 請求項1から請求項5のいずれか一項に記載の物理量センサーと、
角速度センサーと、
前記物理量センサーおよび前記角速度センサーを制御する制御部と、
を備えることを特徴とする慣性計測ユニット。 - 請求項1から請求項5のいずれか一項に記載の物理量センサーと、
前記物理量センサーが収容されているケースと、
前記ケースに収容され、前記物理量センサーからの出力データを処理する処理部と、
前記ケースに収容されている表示部と、
前記ケースの開口部を塞いでいる透光性カバーと、
を備えることを特徴とする携帯型電子機器。 - 請求項1から請求項5のいずれか一項に記載の物理量センサーと、
前記物理量センサーから出力された検出信号に基づいて制御を行う制御部と、
を備えていることを特徴とする電子機器。 - 請求項1から請求項5のいずれか一項に記載の物理量センサーと、
前記物理量センサーから出力された検出信号に基づいて制御を行う制御部と、
を備えていることを特徴とする移動体。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017165161A JP6911645B2 (ja) | 2017-08-30 | 2017-08-30 | 物理量センサー、物理量センサーの製造方法、複合センサー、慣性計測ユニット、携帯型電子機器、電子機器及び移動体 |
| CN201810986948.7A CN109425334B (zh) | 2017-08-30 | 2018-08-28 | 物理量传感器及其制造方法、复合传感器及惯性计测单元 |
| EP18191138.9A EP3450993B1 (en) | 2017-08-30 | 2018-08-28 | Physical quantity sensor, method for manufacturing physical quantity sensor, complex sensor, inertia measurement unit, portable electronic apparatus, electronic apparatus, and vehicle |
| US16/115,629 US10996237B2 (en) | 2017-08-30 | 2018-08-29 | Physical quantity sensor, method for manufacturing physical quantity sensor, complex sensor, inertia measurement unit, portable electronic apparatus, electronic apparatus, and vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017165161A JP6911645B2 (ja) | 2017-08-30 | 2017-08-30 | 物理量センサー、物理量センサーの製造方法、複合センサー、慣性計測ユニット、携帯型電子機器、電子機器及び移動体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019045167A JP2019045167A (ja) | 2019-03-22 |
| JP2019045167A5 JP2019045167A5 (ja) | 2020-08-13 |
| JP6911645B2 true JP6911645B2 (ja) | 2021-07-28 |
Family
ID=63442450
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017165161A Active JP6911645B2 (ja) | 2017-08-30 | 2017-08-30 | 物理量センサー、物理量センサーの製造方法、複合センサー、慣性計測ユニット、携帯型電子機器、電子機器及び移動体 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10996237B2 (ja) |
| EP (1) | EP3450993B1 (ja) |
| JP (1) | JP6911645B2 (ja) |
| CN (1) | CN109425334B (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11820648B2 (en) * | 2018-05-15 | 2023-11-21 | Murata Manufacturing Co., Ltd. | Vibration damping in MEMS acceleration sensors |
| JP2020159917A (ja) * | 2019-03-27 | 2020-10-01 | セイコーエプソン株式会社 | 慣性センサー、電子機器および移動体 |
| JP2021004791A (ja) * | 2019-06-26 | 2021-01-14 | セイコーエプソン株式会社 | 慣性センサー、電子機器および移動体 |
| JP7383978B2 (ja) * | 2019-10-23 | 2023-11-21 | セイコーエプソン株式会社 | 物理量センサー、電子機器および移動体 |
| JP2021071394A (ja) * | 2019-10-31 | 2021-05-06 | セイコーエプソン株式会社 | 物理量センサー、電子機器及び移動体 |
| JP2021117070A (ja) * | 2020-01-24 | 2021-08-10 | セイコーエプソン株式会社 | 振動デバイス、電子機器、及び移動体 |
| CN113325200B (zh) | 2020-02-28 | 2024-04-05 | 精工爱普生株式会社 | 物理量传感器、电子设备和移动体 |
| JP2021173536A (ja) | 2020-04-20 | 2021-11-01 | セイコーエプソン株式会社 | 慣性センサー、電子機器、及び移動体 |
| JP2021173700A (ja) | 2020-04-28 | 2021-11-01 | セイコーエプソン株式会社 | 物理量センサー、電子機器および移動体 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008043788A1 (de) | 2008-11-17 | 2010-05-20 | Robert Bosch Gmbh | Mikromechanisches Bauelement |
| JP2012135819A (ja) | 2010-12-24 | 2012-07-19 | Toyota Central R&D Labs Inc | Memsデバイス |
| US8555720B2 (en) * | 2011-02-24 | 2013-10-15 | Freescale Semiconductor, Inc. | MEMS device with enhanced resistance to stiction |
| DE102011057110A1 (de) * | 2011-12-28 | 2013-07-04 | Maxim Integrated Products, Inc. | MEMS-Beschleunigungssensor |
| JP5935402B2 (ja) | 2012-03-08 | 2016-06-15 | セイコーエプソン株式会社 | 物理量センサーおよび電子機器 |
| JP5943192B2 (ja) * | 2012-04-10 | 2016-06-29 | セイコーエプソン株式会社 | 物理量センサーおよびその製造方法、並びに電子機器 |
| JP6146565B2 (ja) * | 2013-08-06 | 2017-06-14 | セイコーエプソン株式会社 | 物理量センサー、電子機器、および移動体 |
| JP2015072188A (ja) * | 2013-10-03 | 2015-04-16 | セイコーエプソン株式会社 | 物理量検出素子、および物理量検出装置、電子機器、移動体 |
| DE102015209941A1 (de) * | 2015-05-29 | 2016-12-01 | Robert Bosch Gmbh | Mikromechanischer Beschleunigungssensor |
| US20170023606A1 (en) * | 2015-07-23 | 2017-01-26 | Freescale Semiconductor, Inc. | Mems device with flexible travel stops and method of fabrication |
| JP6661941B2 (ja) * | 2015-09-29 | 2020-03-11 | セイコーエプソン株式会社 | 物理量センサー、物理量センサーの製造方法、センサーデバイス、電子機器および移動体 |
| US10502759B2 (en) * | 2017-10-24 | 2019-12-10 | Nxp Usa, Inc. | MEMS device with two-stage motion limit structure |
-
2017
- 2017-08-30 JP JP2017165161A patent/JP6911645B2/ja active Active
-
2018
- 2018-08-28 CN CN201810986948.7A patent/CN109425334B/zh active Active
- 2018-08-28 EP EP18191138.9A patent/EP3450993B1/en active Active
- 2018-08-29 US US16/115,629 patent/US10996237B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3450993B1 (en) | 2020-01-22 |
| US20190064201A1 (en) | 2019-02-28 |
| CN109425334A (zh) | 2019-03-05 |
| EP3450993A1 (en) | 2019-03-06 |
| JP2019045167A (ja) | 2019-03-22 |
| US10996237B2 (en) | 2021-05-04 |
| CN109425334B (zh) | 2023-10-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109425333B (zh) | 物理量传感器、复合传感器、惯性计测单元及电子设备 | |
| JP6911645B2 (ja) | 物理量センサー、物理量センサーの製造方法、複合センサー、慣性計測ユニット、携帯型電子機器、電子機器及び移動体 | |
| CN109425755B (zh) | 物理量及复合传感器、惯性测量单元、电子设备及移动体 | |
| US10974957B2 (en) | Physical quantity sensor, complex sensor, inertial measurement unit, portable electronic device, electronic device, and vehicle | |
| JP6943130B2 (ja) | Memsデバイス、慣性計測装置、移動体測位装置、携帯型電子機器、電子機器、および移動体 | |
| JP7139661B2 (ja) | 物理量センサー、物理量センサーデバイス、複合センサーデバイス、慣性計測装置、電子機器および移動体 | |
| US11754594B2 (en) | Physical quantity sensor, composite sensor, inertial measurement unit, portable electronic apparatus, electronic apparatus, and vehicle | |
| US11448506B2 (en) | Inertial sensor, method for manufacturing inertial sensor, inertial measurement unit, portable electronic apparatus, electronic apparatus, and vehicle | |
| US11852652B2 (en) | Angular velocity sensor, electronic apparatus, and vehicle | |
| JP2019109141A (ja) | 物理量センサー、複合センサー、慣性計測ユニット、携帯型電子機器、電子機器、移動体、および物理量センサーの製造方法 | |
| JP2019132593A (ja) | Memsデバイス、慣性計測装置、移動体測位装置、携帯型電子機器、電子機器、および移動体 | |
| JP2019113330A (ja) | 物理量センサー、複合センサー、慣性計測ユニット、携帯型電子機器、電子機器、移動体、および物理量センサーの製造方法 | |
| JP2019060737A (ja) | 物理量センサー、慣性計測装置、移動体測位装置、携帯型電子機器、電子機器および移動体 | |
| JP7135291B2 (ja) | 物理量センサー、慣性計測装置、移動体測位装置、電子機器および移動体 | |
| JP2021006827A (ja) | 物理量センサー、複合センサー、慣性計測ユニット、携帯型電子機器、電子機器、および移動体 | |
| JP2019060736A (ja) | 物理量センサー、慣性計測装置、移動体測位装置、携帯型電子機器、電子機器、および移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180910 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20190920 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20191209 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200622 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200622 |
|
| RD07 | Notification of extinguishment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7427 Effective date: 20200803 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210310 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210323 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210520 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210608 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210621 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6911645 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |