JP6830386B2 - 測定ヘッド - Google Patents
測定ヘッド Download PDFInfo
- Publication number
- JP6830386B2 JP6830386B2 JP2017061952A JP2017061952A JP6830386B2 JP 6830386 B2 JP6830386 B2 JP 6830386B2 JP 2017061952 A JP2017061952 A JP 2017061952A JP 2017061952 A JP2017061952 A JP 2017061952A JP 6830386 B2 JP6830386 B2 JP 6830386B2
- Authority
- JP
- Japan
- Prior art keywords
- slider
- measurement
- measuring head
- posture
- guide
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000005259 measurement Methods 0.000 claims description 127
- 239000012530 fluid Substances 0.000 claims description 42
- 239000000523 sample Substances 0.000 claims description 34
- 238000001514 detection method Methods 0.000 claims description 6
- 230000007246 mechanism Effects 0.000 description 36
- 230000001105 regulatory effect Effects 0.000 description 7
- 230000005484 gravity Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 241001422033 Thestylus Species 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000001771 impaired effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/02—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness
- G01B21/06—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness specially adapted for measuring length or width of objects while moving
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/02—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness
- G01B21/04—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness by measuring coordinates of points
- G01B21/047—Accessories, e.g. for positioning, for tool-setting, for measuring probes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B13/00—Measuring arrangements characterised by the use of fluids
- G01B13/02—Measuring arrangements characterised by the use of fluids for measuring length, width or thickness
- G01B13/03—Measuring arrangements characterised by the use of fluids for measuring length, width or thickness by measuring coordinates of points
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/004—Measuring arrangements characterised by the use of mechanical techniques for measuring coordinates of points
- G01B5/008—Measuring arrangements characterised by the use of mechanical techniques for measuring coordinates of points using coordinate measuring machines
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02049—Interferometers characterised by particular mechanical design details
- G01B9/0205—Interferometers characterised by particular mechanical design details of probe head
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- A Measuring Device Byusing Mechanical Method (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Fluid Mechanics (AREA)
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
Description
第1測定軸用の第1スライダ、案内用の第1ガイド、及び、駆動用の第1モータと、
前記第1測定軸と平行でない第2測定軸用の第2スライダ、前記第1スライダに固定された案内用の第2ガイド、及び、駆動用の第2モータと、
前記第2スライダに保持されたワーク検知用のプローブと、
を備え、前記各スライダの移動に伴って前記プローブにワーク表面を検出させる測定ヘッドであって、
該測定ヘッドは、外部の任意の移動装置に前記第1ガイドを介して着脱可能であり、
前記第1スライダと前記第1ガイドを接続し前記第1測定軸方向に伸縮自在の第1流体圧シリンダと、
前記第2スライダと前記第2ガイドを接続し前記第2測定軸方向に伸縮自在の第2流体圧シリンダと、
該測定ヘッドの測定姿勢に応じて、前記第1流体圧シリンダ及び前記第2流体圧シリンダへ供給する流体の圧力を変更する第1流体圧変更手段および第2流体圧変更手段と、
を備えることを特徴とする。
前記プローブは、前記第3ガイドおよび前記第3スライダを介在して、前記第2スライダに保持され、
該測定ヘッドは、さらに、前記第3スライダと前記第3ガイドを接続し前記第3測定軸方向に伸縮自在の第3流体圧シリンダと、
該測定ヘッドの測定姿勢に応じて、前記第3流体圧シリンダへ供給する流体の圧力を変更する第3流体圧変更手段と、を備えることが好ましい。
この構成のようにプローブの測定軸を3方向に設ける場合、モータ動力の補助機構を2方向の場合と同様に設けるだけでよい。
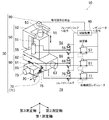
図1は本発明に係る測定ヘッド10の立体図であり、その補助機構の制御ブロック図を重ねて示したものである。測定ヘッド10は、プローブ20と、プローブの駆動装置30と、制御装置40とから構成され、外部の移動装置に保持された状態で、プローブ駆動装置30の動作に伴うプローブ20の動きによってワーク表面を検出する。
第1補助機構54は、第1エアシリンダ(流体圧シリンダに相当)55、第1自動調圧レギュレータ(流体圧変更手段に相当)57及び第1電磁切換弁(流路切換手段に相当)56を備える。一組の第1エアシリンダ55は、第1測定軸方向に伸縮自在に配置され、第1スライダ51と第1ガイド52を接続する。丁度、第1スライダ51を挟むように2本の第1エアシリンダ55が配置され、ロッド側の先端が第1ガイド52から延設されたアーム部に固定され、反ロッド側の先端が第1スライダ51の側部に固定されている。
傾斜角θ1=0°(第1測定軸:鉛直下向き)の場合、エアー圧力を最大(100%)とし、供給先を反ロッド側とする。図3(A)参照。
θ=45°では、エアー圧力を71%とし、供給先を反ロッド側とする。図3(B)参照。
θ=90°(水平)の場合、エアー圧力を最小(0%)とする。供給先はどちらでもよいが、ここでは、直前の状態(例えば反ロッド側)を維持するものとする。図3(C)参照。
θ=135°では、エアー圧力を71%とし、供給先をロッド側とする。図3(D)参照。
θ=180°(鉛直上向き)の場合、エアー圧力を最大(100%)とし、供給先をロッド側とする。図3(E)参照。
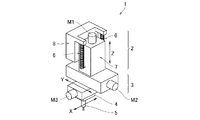
(1)測定姿勢に応じて各スライダ51〜71に作用する重力の影響は大きく変化するが、測定ヘッド10の構成であれば、測定姿勢に応じて各エアシリンダ55〜75の付勢力を変更し、各スライダ51〜71に対して個別に調整した付勢力を加えるようにしたので、姿勢変化に伴う各モータ53〜73の負荷変動をゼロ若しくは非常に小さく抑えることができる。これにより、測定姿勢に依存しないモータの駆動性能が発揮され、測定ヘッドの性能・機能を損なわずに、あらゆる測定姿勢をとり得る測定ヘッド10を提供できる。
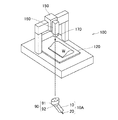
(2)図2のような門型のCNC三次元座標測定機100に測定ヘッドを適用するといった測定ヘッドの用途を拡大させることができる。
(3)三次元測定機100のスピンドル170への測定ヘッド10の取り付け姿勢の自由度が上がる。
(4)測定ヘッド10に追加する機械要素を実質的にエアシリンダ55〜75だけとすることができる。図7のバネを利用した場合とほとんど構造の変化がなくて済み、小型の測定ヘッドを維持し易い。
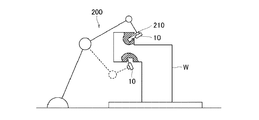
ロボットアーム200が、図示しない交換ラックに掛けられている測定ヘッド10を取りにいく。
次に、測定ヘッド10は、ロボットアーム200先端の保持部210に保持された状態で、ベルトコンベヤ上の加工部品Wの測定箇所へ持っていかれ、所望の姿勢に維持される。
次に、前述の姿勢検出器80(図1)によって測定ヘッド10の姿勢を検出し、その姿勢に応じて各測定軸のエアシリンダ55〜75への供給エアーの流路を決定し、エアー圧力を調整する。
次に、測定ヘッド10を単独で動作させて、プローブ20により測定箇所の表面性状を測定する。
測定後は、測定ヘッド10を保持したまま次の測定指令を待ってもよいし、測定ヘッド10をラックに戻して他の測定や加工などの作業に進んでもよい。
20 プローブ
30 プローブ駆動装置
40 制御装置
50,60,70 第1〜第3スライド機構
51,61,71 第1〜第3スライダ
52,62 第1,第2ガイド
53,63,73 第1〜第3モータ
54,64,74 第1〜第3補助機構
55,65,75 第1〜第3エアシリンダ(第1〜第3流体圧シリンダ)
56,66,76 第1〜第3電磁切換弁(第1〜第3流路切換手段)
57,67,77 第1〜第3自動調圧レギュレータ(第1〜第3流体圧変更手段)
80 姿勢検出器(姿勢検出手段)
100 門型の三次元測定機(移動装置)
200 ロボットアーム(移動装置)
Claims (3)
- 第1測定軸用の第1スライダ、案内用の第1ガイド、及び、駆動用の第1モータと、
前記第1測定軸と平行でない第2測定軸用の第2スライダ、前記第1スライダに固定された案内用の第2ガイド、及び、駆動用の第2モータと、
前記第2スライダに保持されたワーク検知用のプローブと、
を備え、前記各スライダの移動に伴って前記プローブにワーク表面を検出させる測定ヘッドであって、
該測定ヘッドは、外部の任意の移動装置に前記第1ガイドを介して着脱可能であり、
前記第1スライダと前記第1ガイドを接続し前記第1測定軸方向に伸縮自在の第1流体圧シリンダと、
前記第2スライダと前記第2ガイドを接続し前記第2測定軸方向に伸縮自在の第2流体圧シリンダと、
該測定ヘッドの測定姿勢に応じて、前記第1流体圧シリンダ及び前記第2流体圧シリンダへ供給する流体の圧力を変更する第1流体圧変更手段および第2流体圧変更手段と、
を備えることを特徴とする測定ヘッド。 - 請求項1記載の測定ヘッドにおいて、さらに、該測定ヘッドの測定姿勢を検知する姿勢検出手段を備え、
前記各流体圧変更手段は、前記姿勢検出手段からの姿勢情報に基づいて前記流体の圧力を変更することを特徴とする測定ヘッド。 - 請求項1または2記載の測定ヘッドにおいて、
前記第2スライダと前記プローブの間に、前記第1測定軸および前記第2測定軸のいずれとも平行でない第3測定軸用の第3スライダと、前記第2スライダに固定された案内用の第3ガイドと、駆動用の第3モータとが設けられ、
前記プローブは、前記第3ガイドおよび前記第3スライダを介在して、前記第2スライダに保持され、
該測定ヘッドは、さらに、前記第3スライダと前記第3ガイドを接続し前記第3測定軸方向に伸縮自在の第3流体圧シリンダと、
該測定ヘッドの測定姿勢に応じて、前記第3流体圧シリンダへ供給する流体の圧力を変更する第3流体圧変更手段と、を備えることを特徴とする測定ヘッド。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017061952A JP6830386B2 (ja) | 2017-03-27 | 2017-03-27 | 測定ヘッド |
| US15/933,840 US10551184B2 (en) | 2017-03-27 | 2018-03-23 | Measuring head |
| DE102018204654.9A DE102018204654A1 (de) | 2017-03-27 | 2018-03-27 | Messkopf |
| CN201810259347.6A CN108662996B (zh) | 2017-03-27 | 2018-03-27 | 测头 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017061952A JP6830386B2 (ja) | 2017-03-27 | 2017-03-27 | 測定ヘッド |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018163125A JP2018163125A (ja) | 2018-10-18 |
| JP6830386B2 true JP6830386B2 (ja) | 2021-02-17 |
Family
ID=63450657
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017061952A Expired - Fee Related JP6830386B2 (ja) | 2017-03-27 | 2017-03-27 | 測定ヘッド |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10551184B2 (ja) |
| JP (1) | JP6830386B2 (ja) |
| CN (1) | CN108662996B (ja) |
| DE (1) | DE102018204654A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6830386B2 (ja) * | 2017-03-27 | 2021-02-17 | 株式会社ミツトヨ | 測定ヘッド |
| CN110243323B (zh) * | 2019-06-18 | 2024-10-29 | 苏州博达特机电科技有限公司 | 一种用于鲁班锁的在线测量装置 |
| CN111679137A (zh) * | 2020-05-26 | 2020-09-18 | 江西源盛泰电子科技有限公司 | 一种背光屏检测治具 |
| JP2022037326A (ja) * | 2020-08-25 | 2022-03-09 | 株式会社オプティム | プログラム、方法、及びシステム |
| CN116678741B (zh) * | 2023-05-31 | 2023-10-27 | 涿州市紫阳机械设备科技有限公司 | 一种具有检测功能的机械零部件加工设备 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4389781A (en) * | 1981-08-10 | 1983-06-28 | The Bendix Corporation | Pneumatic counterbalance for a coordinate measuring machine |
| DE4424225A1 (de) * | 1994-07-09 | 1996-01-11 | Zeiss Carl Fa | Tastkopf für Koordinatenmeßgeräte |
| DE10100350A1 (de) * | 2001-01-05 | 2002-07-11 | Zeiss Carl | Tastkopf für ein Koordinatenmeßgerät |
| JP4330388B2 (ja) * | 2003-07-28 | 2009-09-16 | 株式会社ミツトヨ | 倣いプローブ |
| US7395607B1 (en) * | 2005-06-14 | 2008-07-08 | Discovery Technology International, Lllp | Rotational and translational microposition apparatus and method |
| EP2092269B1 (en) * | 2006-11-20 | 2019-05-01 | Hexagon Technology Center GmbH | Coordinate measurement machine with improved joint |
| JP5371532B2 (ja) | 2009-04-23 | 2013-12-18 | 株式会社ミツトヨ | 三次元測定機 |
| JP5451180B2 (ja) * | 2009-05-22 | 2014-03-26 | 株式会社ミツトヨ | 真円度測定機 |
| JP2011135751A (ja) * | 2009-12-25 | 2011-07-07 | Nikon Corp | 駆動装置および測定装置 |
| US8432119B2 (en) * | 2010-04-14 | 2013-04-30 | Babcock & Wilcox Technical Services Y-12, Llc | Method and apparatus for characterizing and enhancing the functional performance of machine tools |
| CN103562672B (zh) * | 2011-01-19 | 2016-09-28 | 瑞尼斯豪公司 | 用于机床设备的模拟测量探头 |
| CN201983771U (zh) * | 2011-03-22 | 2011-09-21 | 青岛麦科三维测量设备有限公司 | 气动平衡装置及三坐标测量机 |
| JP6611168B2 (ja) * | 2015-04-07 | 2019-11-27 | 株式会社ミツトヨ | プローブ測定力調整装置 |
| JP6649013B2 (ja) * | 2015-08-27 | 2020-02-19 | 株式会社ミツトヨ | プローブヘッド回転機構 |
| JP6584892B2 (ja) | 2015-09-24 | 2019-10-02 | ジヤトコ株式会社 | 車両のセーリングストップ制御方法及び制御装置 |
| JP6769764B2 (ja) * | 2016-07-19 | 2020-10-14 | 株式会社ミツトヨ | 測定プローブ及び測定装置 |
| DE102017100992A1 (de) * | 2017-01-19 | 2018-07-19 | Carl Mahr Holding Gmbh | Messvorrichtung und Verfahren zum Betreiben einer Messvorrichtung |
| JP2018151187A (ja) * | 2017-03-10 | 2018-09-27 | 株式会社島津製作所 | 走査型プローブ顕微鏡 |
| JP6830386B2 (ja) * | 2017-03-27 | 2021-02-17 | 株式会社ミツトヨ | 測定ヘッド |
-
2017
- 2017-03-27 JP JP2017061952A patent/JP6830386B2/ja not_active Expired - Fee Related
-
2018
- 2018-03-23 US US15/933,840 patent/US10551184B2/en not_active Expired - Fee Related
- 2018-03-27 CN CN201810259347.6A patent/CN108662996B/zh not_active Expired - Fee Related
- 2018-03-27 DE DE102018204654.9A patent/DE102018204654A1/de not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| US20180274914A1 (en) | 2018-09-27 |
| JP2018163125A (ja) | 2018-10-18 |
| DE102018204654A1 (de) | 2018-09-27 |
| CN108662996A (zh) | 2018-10-16 |
| CN108662996B (zh) | 2021-09-10 |
| US10551184B2 (en) | 2020-02-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6830386B2 (ja) | 測定ヘッド | |
| US7076883B2 (en) | Scanning probe | |
| JP4875180B2 (ja) | 微細接触力調整機構を有する接触式計測装置 | |
| CA2807204C (en) | Device for error correction for cnc machines | |
| US10107618B2 (en) | Coordinate measuring machine | |
| CN102564368B (zh) | 坐标测量用测头单元及坐标测量机 | |
| CN105716559A (zh) | 坐标测量机、探测系统以及补偿探针元件处的力的方法 | |
| US20160084631A1 (en) | Roundness measurement device and control method | |
| US10422629B2 (en) | Method and apparatus for determining a plurality of spatial coordinates on a measurement object | |
| JP5355037B2 (ja) | 精度測定方法及び数値制御工作機械の誤差補正方法並びに誤差補正機能を有した数値制御工作機械 | |
| EP2141445B1 (en) | Measuring instrument | |
| JP2008241608A (ja) | ワーク基準点機上検出方法及びその方法を用いた加工装置 | |
| JP6800421B1 (ja) | 測定装置及び測定方法 | |
| JP2020517939A (ja) | 測定装置カウンターバランス | |
| US20070180962A1 (en) | Control method for a machine tool with numerical control | |
| CN113950650B (zh) | 调整量推定装置、调整量推定方法及记录介质 | |
| JP2025036506A (ja) | 形状測定装置 | |
| JP2010201581A (ja) | 工作機械のワーク姿勢制御装置 | |
| JP7637329B2 (ja) | 形状測定装置 | |
| JP2008279535A (ja) | 加工装置、および加工方法 | |
| CN109397090A (zh) | 测量装置 | |
| JP2005249710A (ja) | 形状測定機 | |
| KR101369857B1 (ko) | 이동식 3차원 치수 측정장치 | |
| JP2002154028A (ja) | 加工装置の移動ステージ機構 | |
| KR101307195B1 (ko) | 이동식 3차원치수 측정장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200213 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201217 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210126 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6830386 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |