JP6812468B2 - 磁気浮上動力システム - Google Patents
磁気浮上動力システム Download PDFInfo
- Publication number
- JP6812468B2 JP6812468B2 JP2018569070A JP2018569070A JP6812468B2 JP 6812468 B2 JP6812468 B2 JP 6812468B2 JP 2018569070 A JP2018569070 A JP 2018569070A JP 2018569070 A JP2018569070 A JP 2018569070A JP 6812468 B2 JP6812468 B2 JP 6812468B2
- Authority
- JP
- Japan
- Prior art keywords
- hub
- axis
- magnetic
- power system
- magnetic levitation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005339 levitation Methods 0.000 title claims description 164
- 230000003993 interaction Effects 0.000 claims description 16
- 230000008859 change Effects 0.000 claims description 11
- 238000007667 floating Methods 0.000 claims description 5
- 230000005540 biological transmission Effects 0.000 description 10
- 238000010586 diagram Methods 0.000 description 7
- 238000005516 engineering process Methods 0.000 description 5
- 238000007796 conventional method Methods 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 238000002485 combustion reaction Methods 0.000 description 3
- 238000013016 damping Methods 0.000 description 3
- 230000003137 locomotive effect Effects 0.000 description 3
- 230000002265 prevention Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 238000003915 air pollution Methods 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000005672 electromagnetic field Effects 0.000 description 2
- 230000004308 accommodation Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000003912 environmental pollution Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 238000010248 power generation Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L13/00—Electric propulsion for monorail vehicles, suspension vehicles or rack railways; Magnetic suspension or levitation for vehicles
- B60L13/04—Magnetic suspension or levitation for vehicles
- B60L13/06—Means to sense or control vehicle position or attitude with respect to railway
- B60L13/08—Means to sense or control vehicle position or attitude with respect to railway for the lateral position
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N15/00—Holding or levitation devices using magnetic attraction or repulsion, not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L13/00—Electric propulsion for monorail vehicles, suspension vehicles or rack railways; Magnetic suspension or levitation for vehicles
- B60L13/04—Magnetic suspension or levitation for vehicles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/0474—Active magnetic bearings for rotary movement
- F16C32/0489—Active magnetic bearings for rotary movement with active support of five degrees of freedom, e.g. two radial magnetic bearings combined with an axial bearing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60B—VEHICLE WHEELS; CASTORS; AXLES FOR WHEELS OR CASTORS; INCREASING WHEEL ADHESION
- B60B19/00—Wheels not otherwise provided for or having characteristics specified in one of the subgroups of this group
- B60B19/006—Magnetic wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K1/00—Arrangement or mounting of electrical propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K7/00—Disposition of motor in, or adjacent to, traction wheel
- B60K7/0007—Disposition of motor in, or adjacent to, traction wheel the motor being electric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K8/00—Arrangement or mounting of propulsion units not provided for in one of the preceding main groups
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L13/00—Electric propulsion for monorail vehicles, suspension vehicles or rack railways; Magnetic suspension or levitation for vehicles
- B60L13/10—Combination of electric propulsion and magnetic suspension or levitation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/006—Structural association of a motor or generator with the drive train of a motor vehicle
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/08—Structural association with bearings
- H02K7/09—Structural association with bearings with magnetic bearings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/18—Structural association of electric generators with mechanical driving motors, e.g. with turbines
- H02K7/1807—Rotary generators
- H02K7/1846—Rotary generators structurally associated with wheels or associated parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60B—VEHICLE WHEELS; CASTORS; AXLES FOR WHEELS OR CASTORS; INCREASING WHEEL ADHESION
- B60B21/00—Rims
- B60B21/02—Rims characterised by transverse section
- B60B21/021—Rims characterised by transverse section with inwardly directed flanges, i.e. the tyre-seat being reversed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60B—VEHICLE WHEELS; CASTORS; AXLES FOR WHEELS OR CASTORS; INCREASING WHEEL ADHESION
- B60B2900/00—Purpose of invention
- B60B2900/90—Providing or changing
- B60B2900/931—Magnetic effects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/26—Rail vehicles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2326/00—Articles relating to transporting
- F16C2326/01—Parts of vehicles in general
- F16C2326/02—Wheel hubs or castors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2380/00—Electrical apparatus
- F16C2380/26—Dynamo-electric machines or combinations therewith, e.g. electro-motors and generators
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- General Engineering & Computer Science (AREA)
- Magnetic Bearings And Hydrostatic Bearings (AREA)
- Vehicle Body Suspensions (AREA)
Description

(付記1)
ハブと半軸とに設置された磁気浮上動力システムであって、
前記ハブと前記半軸とに設置され、前記ハブと前記半軸との間の磁場の相互作用により、前記ハブを運動させるように押し進めることができる動力を生じる磁気動力システムと、
前記ハブと前記半軸とに設置され、前記ハブと前記半軸との間の磁場の相互作用により、前記ハブと前記半軸とを両者の対向する周方向における360度の範囲内に浮上状態にさせることができる第1の磁気浮上システムと、
前記ハブと前記半軸とに設置され、前記ハブと前記半軸との間の磁場の相互作用により、前記ハブと前記半軸とを前記ハブの中心軸方向に浮上状態にさせることができる第2の磁気浮上システムと、を含む、ことを特徴とする磁気浮上動力システム。
前記半軸は自転しない、ことを特徴とする付記1に記載の磁気浮上動力システム。
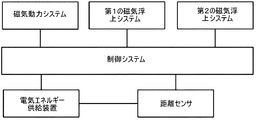
前記磁気浮上動力システムは、前記磁気動力システム、前記第1の磁気浮上システム、及び前記第2の磁気浮上システムに電力を供給するための電気エネルギー供給装置を更に含み、前記電気エネルギー供給装置の出力電流を調整することで、前記磁気動力システムが提供した動力の方向、前記磁気動力システムが提供した動力の大きさ、及び/又は前記ハブと前記半軸との間の浮上距離を変更する、ことを特徴とする付記1に記載の磁気浮上動力システム。
前記磁気浮上動力システムは、前記半軸及び/又は前記ハブに設置され、前記ハブと前記半軸との間の浮上距離を測定するための距離センサを更に含む、ことを特徴とする付記3に記載の磁気浮上動力システム。
前記磁気浮上動力システムは、前記電気エネルギー供給装置と前記距離センサとに接続されている制御システムを更に含み、当該制御システムは、前記ハブと前記半軸との間の浮上距離を安全浮上距離に保持するように、前記距離センサによる測定データに応じて、前記電気エネルギー供給装置の出力電流を調整するために用いられ、前記制御システムは、更に、前記磁気浮上動力システムを適用した物体が速度及び/又は方向の変更要求を有する場合、前記電気エネルギー供給装置の出力電流を調整することで、前記磁気動力システムが提供した動力の大きさ及び/又は方向を変更するために用いられる、ことを特徴とする付記4に記載の磁気浮上動力システム。
前記磁気動力システムは、
前記ハブに設置されたロータと、
前記半軸に設置されたステータと、を含む、ことを特徴とする付記1〜5のいずれか1つに記載の磁気浮上動力システム。
前記第1の磁気浮上システムは、
前記ハブに設置された第1の永久磁石部材と、
前記半軸に設置され、且つ前記第1の永久磁石部材に対向設置された第1の電磁部材と、を含む、ことを特徴とする付記6に記載の磁気浮上動力システム。
前記第2の磁気浮上システムは、
前記ハブに設置された第2の永久磁石部材と、
前記半軸に設置され、且つ前記第2の永久磁石部材に対向設置された第2の電磁部材と、を含む、ことを特徴とする付記7に記載の磁気浮上動力システム。
前記磁気動力システム、前記第1の磁気浮上システム、及び/又は前記第2の磁気浮上システムは、それぞれ1つ又は複数である、ことを特徴とする付記1〜5のいずれか1つに記載の磁気浮上動力システム。
Claims (7)
- 車両が有するハブと半軸とに設置された磁気浮上動力システムであって、
前記ハブと前記半軸とに設置され、前記ハブと前記半軸との間の磁場の相互作用により、前記ハブを運動させることで前記半軸を押し進めることができる動力を生じる磁気動力システムと、
前記ハブと前記半軸とに設置され、前記ハブと前記半軸との間の磁場の相互作用により、前記ハブと前記半軸とを両者の対向する周方向における360度の範囲内に浮上状態にさせることができる、前記磁気動力システムとは異なる第1の磁気浮上システムと、
前記ハブと前記半軸とに設置され、前記ハブと前記半軸との間の磁場の相互作用により、前記ハブと前記半軸とを前記ハブの中心軸方向に浮上状態にさせることができる第2の磁気浮上システムと、を含み、
前記半軸は、直軸と、前記直軸を中心として配置された半軸環状リングと、前記直軸と前記半軸環状リングとを接続する半軸接続部とを含み、
前記第1の磁気浮上システムは、前記ハブに設置された第1の永久磁石部材と、前記半軸環状リングに設置され、且つ前記第1の永久磁石部材に対向設置された第1の電磁部材と、を含み、
前記車両の運動時に、前記第1の電磁部材と前記第1の永久磁石部材との間の磁場の相互作用により、垂直方向において前記半軸と前記ハブを浮上させ、水平方向において車両運動の動力を伝達するとともに、前記半軸と前記ハブの浮上した状態を維持し続け、
前記半軸は自転せず、
前記ハブの運動は、前記第1の磁気浮上システムにおける前記ハブと前記半軸との間の磁場の相互作用によって、前記半軸を押し進める動力に変換されることを特徴とする磁気浮上動力システム。 - 前記磁気浮上動力システムは、前記磁気動力システム、前記第1の磁気浮上システム、及び前記第2の磁気浮上システムに電力を供給するための電気エネルギー供給装置を更に含み、前記電気エネルギー供給装置の出力電流を調整することで、前記磁気動力システムが提供した動力の方向、前記磁気動力システムが提供した動力の大きさ、及び/又は前記ハブと前記半軸との間の浮上距離を変更する、ことを特徴とする請求項1に記載の磁気浮上動力システム。
- 前記磁気浮上動力システムは、前記半軸及び/又は前記ハブに設置され、前記ハブと前記半軸との間の浮上距離を測定するための距離センサを更に含む、ことを特徴とする請求項2に記載の磁気浮上動力システム。
- 前記磁気浮上動力システムは、前記電気エネルギー供給装置と前記距離センサとに接続されている制御システムを更に含み、当該制御システムは、前記ハブと前記半軸との間の浮上距離を安全浮上距離に保持するように、前記距離センサによる測定データに応じて、前記電気エネルギー供給装置の出力電流を調整するために用いられ、前記制御システムは、更に、前記磁気浮上動力システムを適用した物体が速度及び/又は方向の変更要求を有する場合、前記電気エネルギー供給装置の出力電流を調整することで、前記磁気動力システムが提供した動力の大きさ及び/又は方向を変更するために用いられる、ことを特徴とする請求項3に記載の磁気浮上動力システム。
- 前記磁気動力システムは、
前記ハブに設置されたロータと、
前記半軸に設置されたステータと、を含む、ことを特徴とする請求項1〜4のいずれか一項に記載の磁気浮上動力システム。 - 前記第2の磁気浮上システムは、
前記ハブに設置された第2の永久磁石部材と、
前記半軸に設置され、且つ前記第2の永久磁石部材に対向設置された第2の電磁部材と、を含む、ことを特徴とする請求項1に記載の磁気浮上動力システム。 - 前記磁気動力システム、前記第1の磁気浮上システム、及び/又は前記第2の磁気浮上システムは、それぞれ1つ又は複数である、ことを特徴とする請求項1〜4のいずれか一項に記載の磁気浮上動力システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201610511569.3A CN106114282B (zh) | 2016-07-01 | 2016-07-01 | 一种磁悬浮动力系统 |
| CN201610511569.3 | 2016-07-01 | ||
| PCT/CN2016/097768 WO2018000573A1 (zh) | 2016-07-01 | 2016-09-01 | 一种磁悬浮动力系统 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019520783A JP2019520783A (ja) | 2019-07-18 |
| JP6812468B2 true JP6812468B2 (ja) | 2021-01-13 |
Family
ID=57467913
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018569070A Active JP6812468B2 (ja) | 2016-07-01 | 2016-09-01 | 磁気浮上動力システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11358475B2 (ja) |
| EP (1) | EP3480936B1 (ja) |
| JP (1) | JP6812468B2 (ja) |
| CN (1) | CN106114282B (ja) |
| WO (1) | WO2018000573A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106114282B (zh) * | 2016-07-01 | 2022-07-15 | 大连天亿软件有限公司 | 一种磁悬浮动力系统 |
| CN106712582B (zh) * | 2017-01-09 | 2018-07-17 | 张则羿 | 两点磁悬浮方法及系统 |
| CN108248446B (zh) * | 2018-01-10 | 2020-09-29 | 西南交通大学 | 一种磁浮列车强迫对中悬浮架结构 |
| CN108312891A (zh) * | 2018-03-26 | 2018-07-24 | 江苏理工学院 | 一种装备磁悬浮车轮的智能汽车 |
| CN110406313A (zh) * | 2018-04-27 | 2019-11-05 | 长春市苏伟磁悬浮技术研究所 | 一种磁悬浮车轮 |
| CN208061578U (zh) * | 2018-05-10 | 2018-11-06 | 京东方科技集团股份有限公司 | 支撑装置和显示设备 |
| FR3083386B1 (fr) * | 2018-06-28 | 2021-05-14 | Telma | Ensemble ralentisseur electromagnetique et generatrice et vehicule comportant un tel ensemble |
| CN109080374B (zh) * | 2018-09-28 | 2023-08-11 | 石家庄国红科技发展有限公司 | 悬浮车轮 |
| US11440416B2 (en) * | 2020-02-28 | 2022-09-13 | Safran Landing Systems | Maglev supervisory control architecture |
| CN112193080B (zh) * | 2020-10-14 | 2021-12-17 | 中车株洲电力机车有限公司 | 姿态检测系统、方法、计算机设备及存储介质 |
| WO2023152738A1 (en) * | 2022-02-07 | 2023-08-17 | Kraus Ron | Elongated vertical dynamo/rotating vertical rod apparatus |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56125984A (en) * | 1980-03-10 | 1981-10-02 | Nippon Telegr & Teleph Corp <Ntt> | Magnetically floating movable base |
| JPS61278913A (ja) * | 1985-06-04 | 1986-12-09 | Ntn Toyo Bearing Co Ltd | 磁気浮上式位置決め装置 |
| JP2992578B2 (ja) * | 1990-07-08 | 1999-12-20 | 小山 央二 | エネルギー貯蔵装置 |
| JPH04282050A (ja) * | 1991-02-26 | 1992-10-07 | Shikoku Sogo Kenkyusho:Kk | 電力貯蔵装置 |
| JP3013264B2 (ja) * | 1991-02-26 | 2000-02-28 | 光洋精工株式会社 | 磁気浮上アクチュエータ |
| JPH0549191A (ja) * | 1991-08-13 | 1993-02-26 | Kumagai Gumi Co Ltd | 電力貯蔵装置 |
| JP3694794B2 (ja) * | 1994-01-21 | 2005-09-14 | 株式会社安川電機 | 磁気軸受を用いた同期回転電機とその制御装置及び方法 |
| JPH0946964A (ja) * | 1995-07-27 | 1997-02-14 | Agency Of Ind Science & Technol | 発電装置 |
| US5652472A (en) * | 1995-12-19 | 1997-07-29 | Tozoni; Oleg V. | Magnetodynamic levitation and stabilizing selfregulating system |
| KR20010059891A (ko) * | 1999-12-30 | 2001-07-06 | 이계안 | 타이어 휠의 마그네틱 베어링구조 |
| US6629503B2 (en) * | 2001-06-29 | 2003-10-07 | The Regents Of The University Of California | Inductrack configuration |
| JP4827380B2 (ja) * | 2003-01-28 | 2011-11-30 | 金原 士朗 | 風力発電システム |
| US7185590B2 (en) * | 2004-03-08 | 2007-03-06 | National Taiwan University | Planar maglev positioning system |
| CN100351118C (zh) * | 2004-09-06 | 2007-11-28 | 李岭群 | 磁悬浮列车用履带式磁动机 |
| CN100547900C (zh) | 2006-03-06 | 2009-10-07 | 湖南中科恒源科技股份有限公司 | 磁悬浮风力发电机 |
| US8047138B2 (en) * | 2008-07-08 | 2011-11-01 | Tozoni Oleg V | Self-regulating magneto-dynamic system for high speed ground transportation vehicle |
| CN201966845U (zh) * | 2010-12-29 | 2011-09-07 | 朱石雄 | 一种下悬浮装置的磁浮体悬浮控制电路 |
| CN103958263B (zh) * | 2011-06-30 | 2016-12-07 | Skytran公司 | 用于运输系统的驱动系统 |
| JP6021048B2 (ja) * | 2012-01-23 | 2016-11-02 | パナソニックIpマネジメント株式会社 | 車両用駆動装置 |
| CN103427538B (zh) * | 2013-08-27 | 2015-10-21 | 三峡大学 | 飞轮电池磁悬浮支承装置 |
| CN203637443U (zh) * | 2013-12-04 | 2014-06-11 | 吉林大学 | 一种磁悬浮无轮辐车轮 |
| CN204065724U (zh) * | 2014-04-21 | 2014-12-31 | 南车株洲电力机车有限公司 | 一种车辆悬浮控制电路 |
| CN104176171A (zh) * | 2014-09-05 | 2014-12-03 | 苏州思莱特电子科技有限公司 | 一种电磁驱动车 |
| US20150145363A1 (en) * | 2015-01-13 | 2015-05-28 | Schaeffler Technologies AG & Co. KG | Magnetic wheel bearing |
| CN104901588B (zh) * | 2015-06-18 | 2017-10-31 | 宋召挺 | 一种磁悬浮汽车轮胎系统及减缓汽车轴磨损的方法 |
| CN204821193U (zh) * | 2015-07-24 | 2015-12-02 | 扬州大学 | 磁悬浮电动汽车 |
| CN106114282B (zh) * | 2016-07-01 | 2022-07-15 | 大连天亿软件有限公司 | 一种磁悬浮动力系统 |
-
2016
- 2016-07-01 CN CN201610511569.3A patent/CN106114282B/zh active Active
- 2016-09-01 WO PCT/CN2016/097768 patent/WO2018000573A1/zh unknown
- 2016-09-01 US US16/313,128 patent/US11358475B2/en active Active
- 2016-09-01 JP JP2018569070A patent/JP6812468B2/ja active Active
- 2016-09-01 EP EP16906970.5A patent/EP3480936B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019520783A (ja) | 2019-07-18 |
| US11358475B2 (en) | 2022-06-14 |
| EP3480936A4 (en) | 2019-12-25 |
| WO2018000573A1 (zh) | 2018-01-04 |
| CN106114282B (zh) | 2022-07-15 |
| EP3480936A1 (en) | 2019-05-08 |
| CN106114282A (zh) | 2016-11-16 |
| US20190366853A1 (en) | 2019-12-05 |
| EP3480936B1 (en) | 2022-07-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6812468B2 (ja) | 磁気浮上動力システム | |
| CN102666171B (zh) | 轮毂电机驱动装置 | |
| JP2018507680A (ja) | 無段変速装置 | |
| US10119592B2 (en) | Vehicle drivetrain with active magnetic bearings | |
| CN102355120B (zh) | 变速装置 | |
| KR101952775B1 (ko) | 2단 변속장치 | |
| CN205178681U (zh) | 一种定子电励磁游标电机 | |
| CN108327529A (zh) | 混合动力汽车的后电驱动总成 | |
| Mathews et al. | Flywheel based kinetic energy recovery systems (KERS) integrated in vehicles | |
| CN105391202A (zh) | 一种定子电励磁游标电机 | |
| CN108973528A (zh) | 一种轮轴磁悬浮驱动式电动汽车 | |
| CN102900820A (zh) | 多点接触无级变速器 | |
| CN208006718U (zh) | 混合动力汽车的后电驱动总成 | |
| CN202053908U (zh) | 磁悬浮电动汽车支承驱动系统 | |
| CN211046724U (zh) | 一种筒式磁轮传动装置 | |
| CN204821193U (zh) | 磁悬浮电动汽车 | |
| CN102152745A (zh) | 磁悬浮电动汽车 | |
| CN209184401U (zh) | 离心式动态飞行模拟器轴驱动电机 | |
| CN103562042A (zh) | 驱动系统 | |
| US11492780B1 (en) | Work vehicle having electric machine and energy storage device | |
| US20230131257A1 (en) | Method of electric machine gap adjustment, work vehicle, and energy storage device | |
| US20230129826A1 (en) | Work vehicle and energy storage device having an electric machine and a rotor mass | |
| Sergienko et al. | Study of the two-rotor electric motor of a drive of vehicle drive wheels | |
| CN202935148U (zh) | 一种用于混合动力汽车的电动单元 | |
| US20230126557A1 (en) | Brake for energy storage device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200128 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200428 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200519 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200923 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20200923 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20200923 |
|
| C11 | Written invitation by the commissioner to file amendments |
Free format text: JAPANESE INTERMEDIATE CODE: C11 Effective date: 20201020 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20201116 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20201117 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201215 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201216 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6812468 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |