JP6660108B2 - 画像形成装置 - Google Patents
画像形成装置 Download PDFInfo
- Publication number
- JP6660108B2 JP6660108B2 JP2015129204A JP2015129204A JP6660108B2 JP 6660108 B2 JP6660108 B2 JP 6660108B2 JP 2015129204 A JP2015129204 A JP 2015129204A JP 2015129204 A JP2015129204 A JP 2015129204A JP 6660108 B2 JP6660108 B2 JP 6660108B2
- Authority
- JP
- Japan
- Prior art keywords
- sheet
- unit
- transport
- image forming
- forming apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





















Landscapes
- Paper Feeding For Electrophotography (AREA)
- Control Or Security For Electrophotography (AREA)
- Sheets, Magazines, And Separation Thereof (AREA)
Description
シートが積載される積載手段と、
前記積載手段に積載された前記シートを搬送する搬送手段と、
前記搬送手段が前記シートの搬送を開始してから搬送路の所定位置に前記シートが到着するまでの搬送時間を計時する計時手段と、
前記計時手段によって計時された前記シートの搬送時間が、前記シートの搬送に関連した閾値を超えていないものの、過積載閾値を超えている場合、前記積載手段にシートが過積載されていると判定する判定手段と、
を有することを特徴とする画像形成装置が提供される。
[画像形成装置の構成]
図1を用いて画像形成装置100について説明する。本実施例での画像形成装置100は電子写真方式のプリンタであるが、本発明を適用可能な画像形成装置はインクジェット方式、熱転写方式など、他の画像形成方式を採用していてもよい。画像形成装置100は4つの画像形成部(ステーション)を有しており、イエロー(Y)、マゼンタ(M)、シアン(C)、ブラック(K)のトナー画像を形成する。図1においては、4つの画像形成部にはそれぞれ色にちなんだ参照符号であるY、M、C、Kが付与されている。感光ドラム1は、感光体であり、かつ、像担持体であり、時計方向に所定の周速度(プロセススピード)で回転する。帯電ローラ2は感光ドラム1の表面を一様に帯電させる。光学走査装置9は画像信号に応じた光ビームを出力する。光ビームは感光ドラム1の表面に照射され、静電潜像を形成する。現像ローラ6はトナーを付着させて静電潜像を現像し、トナー画像を形成する。YMCKのトナー画像は一次転写ローラ11によって中間転写ベルト12に重畳的に転写され、多色画像となる。
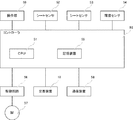
図2を用いてコントローラ50の機能について説明する。CPU51や記憶装置55に記憶されている制御プログラムを実行することで画像形成装置100の全体を統括的に制御する。記憶装置55はROMやRAMなどのメモリを有している。コントローラ50は操作部59から指定された画像形成モードにしたがって画像形成条件を設定する。画像形成条件とは、たとえば、シートSの搬送速度や定着装置18の定着温度などである。画像形成モードには、たとえば、普通紙に画像形成する普通紙モード、厚紙に画像を形成する厚紙モード、封筒に文字を形成する封筒モードなどが含まれうる。コントローラ50は、各画像形成モードごとの画像形成条件を記憶装置55に保持しており、指定された画像形成モードに対応する画像形成条件を読み出す。
手差しトレイ38の構成について図6ないし図8を参照して詳しく説明する。すでに図1に示したように、手差しトレイ38は画像形成装置100の筐体の側面に配置されている。未使用時には画像形成装置100の筐体内部に収納されている。使用時には手差しトレイ38が支点37を中心に回動しながら開く。手差しトレイ38は筐体側面に対して一定角度となると、回動が停止する。図6に示すように、手差しトレイ38は、二つのサイド規制板43とトレイ部40を有している。二つのサイド規制板43はトレイ部40上を搬送方向に直交した方向に移動可能であり、搬送方向に直交した方向におけるシート束の両端(左端と右端)を整列させる。トレイ部40は支点41を中心に回動する。トレイ部40は給紙ローラ36に近づく方向に不図示の付勢機構によって付勢されている。シートSは重力によって落下して突き当て壁42に突き当たることで、シートSの先端が規制される。
ここでは袋状シートの一例として封筒を採用する。ここでは手差しトレイ38に封筒が過積載された状態を詳しく説明する。
図9に示すように封筒Eは袋状の形をしている。つまり、封筒Eの一枚一枚が空気層を持っている。複数枚の封筒Eを積み上げると、容易に押し潰すことができる弾力のある封筒Eの束になる。
図10(B)に示すように、上限枚数をはるかに超えた封筒Eの束がトレイ部40に積載されると、束の一部は係止爪44の上に乗り上げるように積み上げられてしまう。この束の一部はガイド部材45に接触する。封筒Eの束は容易につぶすことができるため、ガイド部材45の下に押し込むことも可能である。しかし、封筒Eの束を押しつぶしたことによる抗力Fbがガイド部材45から束に働く。束はガイド部材45によって強く押さえつけられた状態になり、封筒Eとガイド部材45との間の摩擦力が発生する。
次に封筒Eを過積載したときの搬送機構の挙動について詳しく説明する。
画像形成装置100の設計上で定められた上限枚数よりも少数程度だけ多い封筒Eを過積載したケースでは、係止爪44による抗力Faやガイド部材45による抗力Fbは小さい。図11は上限枚数よりも二枚多い封筒Eが積載されたときの通紙枚数と搬送時間との関係を示している。一枚目の封筒Eと二枚目の封筒Eは過積載された封筒Eに相当するが、それぞれの搬送時間は許容範囲X内に収まっている。よって、搬送遅延は発生していない。
上限枚数に対して一定枚数以上の封筒Eが過積載されると、抗力Faや抗力Fbは大きくなる。図12に示すように、係止爪44の下に封筒Eが過積載された場合には給紙が開始されてから封筒Eの先端がフラグ46を倒すまでの間ずっと封筒Eは係止爪44から抗力Faを受け続ける。大きな搬送抵抗が発生すると、給紙ローラ36および搬送ローラ39でローラスリップが生じ、封筒Eの搬送速度が低下する。図13(A)が示すように、CPU51で計時される搬送時間Tは上限枚数以下の封筒Eが積載されたときの搬送時間Tよりも長くなり、許容範囲Xから逸脱してしまう。そしてこの状態のまま複数枚通紙し続けると、過積載量が少なくなり、搬送時間は許容範囲Xの中におさまっていく。
さらに多くの封筒Eをトレイ部40に積載すると、抗力Fa、Fbはさらに増加する。抗力Fa、Fbの増加に伴いローラスリップの量も増加するため、搬送速度がさらに低下したり、一枚も封筒Eを給紙できなくなったりする。その場合、搬送時間がジャム閾値Tjを超えるまでに封筒Eがフラグ46に到達しなくなるため、CPU51はジャムが発生したと判定し、モータ57を停止させる。
手差しトレイ38へのシートSの過積載を判定する手順について詳しく説明する。過積載によりシートSの束が抗力Faや抗力Fbを受けると、搬送時間Tが増加する。そこで、CPU51は、許容範囲Xの上限値と等しいか、それよりも大きな閾値Tkを搬送時間Tが超えると、過積載が発生したと判定する。
過積載判定は常に実行される必要はない。過積載が発生しやすい状況とそうでない状況とが存在するからである。そこで、過積載判定を実行する条件について説明する。搬送遅延は、とりわけ封筒Eの過積載により生じやすい。そこで、CPU51は操作部59から指定されたシートSの種類が封筒Eなどの袋状シートであることを、過積載判定の実行条件としてもよい。これにより、搬送時間に基づき過積載の判定精度を向上させることが可能となる。また、CPU51は別の要因による搬送遅延を誤って過積載と判定しないようになろう。
過積載に関するメッセージは操作部59に出力されてもよいが、通信装置58を介してネットワーク上のコンピュータ(保守会社のサーバなど)に送信されてもよい。たとえば、CPU51は、過積載が発生したことを示す過積載メッセージを、画像形成装置100について保守契約を結んでいる保守担当者(保守会社)のアドレスに電子メールとして送信してもよい。なお、電子メール以外の通信プロトコルを用いて過積載メッセージが保守会社のサーバに送信されてもよい。なお、過積載に関するメッセージが保守会社に送信される場合、操作部59には出力されなくてもよい。保守会社は、保守契約の一環として画像形成装置100のユーザーに対して過積載が発生したことを電子メールまたは口頭で伝えてもよい。また、保守会社は、シートSの上限積載量や正しい積載方法、封筒印刷の注意点などについてアドバイスしてもよい。
CPU51は過積載状態が解消すると、過積載メッセージの出力を停止または消去する。過積載メッセージの出力を停止または消去する条件を解消条件と呼ぶことにする。解消条件としては、シートセンサ53がシートSを検知しなくなったこと(トレイ部40上のシートSがなくなったこと)であってもよい。シートSがすべて無くなれば、確実に過積載の状況は解消しているからである。
実施例1では搬送時間Tは各シートごとに一回目の給紙動作を基準として搬送時間が計時されていた。つまり、リトライが発生しても搬送時間Tはリセットされなかった。実施例2ではリトライが発生すると搬送時間Tは0にリセットされるものとする。これは二回目の給紙動作の開始タイミングから搬送時間Tが計時し直されることを意味する。
図19(B)に示すように、過積載により一枚目のシートSでリトライが発生したときに、CPU51は搬送時間Tを閾値Tk2と比較する。閾値Tk2は許容範囲Xの下限値以下の値に設定される。CPU51はリトライされたシートSの搬送時間Tが閾値Tk2未満であれば、過積載が発生していると判定する。
実施例1、2によれば搬送時間Tが許容範囲Xから逸脱すると、CPU51は過積載が発生したと判定する。しかし、過積載による抗力Fa、Fbがあまりにも大きくなると、一枚目のシートSですら給紙できなくなる。搬送時間Tの計時はシートSの先端がフラグ46に到達しなければ完了しないように設計することも可能である。この場合、シートSを一枚も給紙できない状態では、搬送時間Tを測定できず、CPU51は過積載を判定できない。そこで、本実施例は、以下のような過積載の判定方法を導入する。
図20のフローチャートを用いて実施例3の過積載判定方法について説明する。図16と比較して、図20では、S2とS3との間にS10とS11が挿入されている。
図22を用いてCPU51の機能を説明する。図4やS2を用いて説明したように、計時部61はモータ57がシートSの搬送を開始してから搬送路の所定位置にシートSが到着するまでの搬送時間Tを計時する。S4などに関して説明したように、判定部62はシートSの搬送時間Tが第一過積載閾値である閾値Tkを超えているかどうかを判定する。とりわけ、判定部62はシートSの搬送時間Tが第一過積載閾値である閾値Tkを超えている場合に、過積載が発生していると判定する。このようにシートSの束の高さを計測するセンサを用いずに、シートの搬送時間に着目することでシートの過積載を従来よりも精度よく検知することが可能となる。なお、画像形成制御部63は、搬送時間Tが閾値Tkを超えていなければ画像形成部を制御して当該シートSに画像を形成する。画像形成制御部63は、シートSの搬送時間Tが閾値Tkを超えていれば画像形成部を制御して当該シートSに画像を形成しない。
Claims (20)
- シートが積載される積載手段と、
前記積載手段に積載された前記シートを搬送する搬送手段と、
前記搬送手段が前記シートの搬送を開始してから搬送路の所定位置に前記シートが到着するまでの搬送時間を計時する計時手段と、
前記計時手段によって計時された前記シートの搬送時間が、前記シートの搬送に関連した閾値を超えていないものの、過積載閾値を超えている場合、前記積載手段にシートが過積載されていると判定する判定手段と、
を有することを特徴とする画像形成装置。 - 前記シートの搬送時間が、画像形成を停止して前記シートを排出するための搬送遅延閾値または画像形成と前記シートの搬送とを停止するためのジャム閾値を超えているかどうかに基づいて前記シートに搬送遅延またはジャムが発生したことを検知する検知手段をさらに有し、前記過積載閾値は、前記シートの搬送に関連した閾値である前記搬送遅延閾値および前記ジャム閾値よりも小さいことを特徴とする請求項1に記載の画像形成装置。
- 前記搬送手段が前記シートの搬送を開始してから前記計時手段が搬送時間を計時する搬送路の前記所定位置まで、所定の時間内に到着しないと、前記搬送時間に、前記過積載閾値を超える値を代入することで、前記判定手段に過積載が発生したと判定させる、代入手段をさらに有することを特徴とする請求項1ないし2のいずれか1項に記載の画像形成装置。
- 前記判定手段は、前記搬送手段が前記シートの搬送ジョブを開始してから所定枚数のシートが搬送されると、前記積載手段の過積載の判定を行うことを停止することを特徴とする請求項1ないし3のいずれか1項に記載の画像形成装置。
- 前記画像形成装置が設定されている環境の環境条件を測定する測定手段をさらに有し、前記判定手段は、前記測定手段により測定された環境条件が所定の環境条件である場合に前記積載手段の過積載の判定を実行することを特徴とする請求項1ないし4のいずれか1項に記載の画像形成装置。
- 前記所定の環境条件は、絶対水蒸気量が所定の水蒸気量以下であり、かつ、環境温度が所定温度以下であり、かつ、環境湿度が所定湿度以下であることを特徴とする請求項5に記載の画像形成装置。
- 前記積載手段は、当該積載手段に積載されるシート束の高さを規制する規制部材を有していることを特徴とする請求項1ないし6のいずれか1項に記載の画像形成装置。
- 前記シートの種類を判別する判別手段をさらに有し、
前記判定手段は、前記シートの種類が袋状シートであると判別された場合に前記積載手段の過積載の判定を実行することを特徴とする請求項1ないし7のいずれか1項に記載の画像形成装置。 - 前記判別手段は、前記画像形成装置が備える複数の制御モードのうち封筒モードが指定されると、前記シートの種類を前記袋状シートであると判別するように構成されていることを特徴とする請求項8に記載の画像形成装置。
- 前記シートのサイズを指定するサイズ指定手段をさらに有し、
前記判別手段は、前記シートのサイズに基づき前記シートの種類を前記袋状シートであると判別するように構成されていることを特徴とする請求項8に記載の画像形成装置。 - 前記計時手段は、前記搬送手段にシートの搬送が指示されると前記搬送時間の計時を開始することを請求項1ないし10のいずれか1項に記載の画像形成装置。
- 前記計時手段は、前記搬送手段にシートの搬送のリトライが指示されると、前記搬送時間の計時をやり直すように構成されており、
前記判定手段は、前記搬送手段にシートの搬送のリトライが指示された後に計時された前記シートの搬送時間が前記過積載閾値よりも小さい第二過積載閾値未満である場合、前記積載手段にシートが過積載されていると判定する、
ことを特徴とする請求項1ないし11のいずれか1項に記載の画像形成装置。 - 前記判定手段が前記積載手段にシートが過積載されていると判定すると、シートが過積載されていることを示す過積載情報を出力する出力手段をさらに有することを特徴とする請求項1ないし12のいずれか1項に記載の画像形成装置。
- 前記積載手段にシートが過積載されていると前記判定手段が判定した後で、前記積載手段から搬送されたシートの搬送時間が過積載閾値を超えなかったという事象が連続して何枚のシートで発生したかをカウントするカウント手段をさらに有し、
前記出力手段は、前記カウント手段のカウント値が停止閾値に到達すると、前記過積載情報の出力を停止するように構成されていることを特徴とする請求項13に記載の画像形成装置。 - 前記積載手段にシートが積載されているかどうかを検出する検出手段をさらに有し、
前記出力手段は、前記積載手段にシートが過積載されていると前記判定手段が判定した後で、前記積載手段にシートが積載されてないことが前記検出手段によって検出されると、前記過積載情報の出力を停止するように構成されていることを特徴とする請求項13または14に記載の画像形成装置。 - 前記出力手段は、前記積載手段にシートが過積載されていると前記判定手段が判定した後で、前記積載手段に積載されているシートの種類が変更されると、前記過積載情報の出力を停止するように構成されていることを特徴とする請求項13ないし15のいずれか1項に記載の画像形成装置。
- 前記出力手段は、前記過積載情報を表示する表示手段であることを特徴とする請求項13ないし16のいずれか1項に記載の画像形成装置。
- 前記出力手段は、前記過積載情報を含むメッセージを送信する送信手段であることを特徴とする請求項13ないし17のいずれか1項に記載の画像形成装置。
- 前記送信手段は、前記画像形成装置の保守担当者のアドレスに前記メッセージを送信するように構成されていることを特徴とする請求項18に記載の画像形成装置。
- シートが積載される積載手段と、
前記積載手段に積載された前記シートを搬送する搬送手段と、
前記搬送手段が前記シートの搬送を開始してから搬送路の所定位置に前記シートが到着するまでの搬送時間を計時する計時手段と、
前記積載手段にシートが過積載されていることを示す情報を出力する出力手段と、
前記計時手段によって計時された前記シートの搬送時間が第一閾値を超えると、前記出力手段に前記情報を出力させ、かつ、前記搬送手段による前記シートの搬送を継続させ、前記シートの搬送時間が前記第一閾値よりも大きな第二閾値を超えると、画像形成を停止させ前記搬送手段によって前記シートを排出させるか、または前記搬送手段による前記シートの搬送を停止させる制御手段と、
を有することを特徴とする画像形成装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015129204A JP6660108B2 (ja) | 2015-06-26 | 2015-06-26 | 画像形成装置 |
| US15/184,026 US9802778B2 (en) | 2015-06-26 | 2016-06-16 | Image forming apparatus for forming image on sheet |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015129204A JP6660108B2 (ja) | 2015-06-26 | 2015-06-26 | 画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017015781A JP2017015781A (ja) | 2017-01-19 |
| JP2017015781A5 JP2017015781A5 (ja) | 2018-07-26 |
| JP6660108B2 true JP6660108B2 (ja) | 2020-03-04 |
Family
ID=57830395
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015129204A Active JP6660108B2 (ja) | 2015-06-26 | 2015-06-26 | 画像形成装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6660108B2 (ja) |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59114232A (ja) * | 1982-12-17 | 1984-07-02 | Ricoh Co Ltd | 給紙装置 |
| JPH0971016A (ja) * | 1995-09-05 | 1997-03-18 | Matsushita Electric Ind Co Ltd | 画像形成装置 |
| JPH0977304A (ja) * | 1995-09-14 | 1997-03-25 | Konica Corp | 給紙制御装置 |
| JPH09249334A (ja) * | 1996-03-14 | 1997-09-22 | Canon Inc | 搬送装置及び画像形成装置並びにファクシミリ装置 |
| JP3212082B2 (ja) * | 1996-12-16 | 2001-09-25 | ブラザー工業株式会社 | 画像記録装置 |
| JP2003104571A (ja) * | 2001-10-01 | 2003-04-09 | Canon Inc | 給紙カセット |
| JP2003276874A (ja) * | 2002-03-22 | 2003-10-02 | Canon Inc | 画像形成装置 |
| JP2004045866A (ja) * | 2002-07-12 | 2004-02-12 | Sharp Corp | 多色画像形成装置および多色画像形成方法 |
| JP2005225643A (ja) * | 2004-02-16 | 2005-08-25 | Canon Inc | シート給送装置および画像形成装置 |
| JP4600205B2 (ja) * | 2005-08-17 | 2010-12-15 | セイコーエプソン株式会社 | 用紙カセット及び情報処理装置 |
| JP2009062121A (ja) * | 2007-09-05 | 2009-03-26 | Ricoh Co Ltd | 画像形成装置、記録媒体取分部材 |
| JP2009256039A (ja) * | 2008-04-16 | 2009-11-05 | Kyocera Mita Corp | 画像形成装置 |
| JP5298036B2 (ja) * | 2010-01-25 | 2013-09-25 | 京セラドキュメントソリューションズ株式会社 | 処理装置 |
| JP5377684B2 (ja) * | 2012-01-31 | 2013-12-25 | 京セラドキュメントソリューションズ株式会社 | 画像形成装置 |
| US20130221602A1 (en) * | 2012-02-29 | 2013-08-29 | Xerox Corporation | Jammed sheet reverse using active retard feeder |
| JP5932396B2 (ja) * | 2012-02-29 | 2016-06-08 | キヤノン株式会社 | シート給送装置及び画像形成装置 |
| JP5951573B2 (ja) * | 2013-09-27 | 2016-07-13 | 京セラドキュメントソリューションズ株式会社 | シート供給装置及び画像形成装置 |
| JP6531722B2 (ja) * | 2016-06-08 | 2019-06-19 | 京セラドキュメントソリューションズ株式会社 | 画像形成装置 |
-
2015
- 2015-06-26 JP JP2015129204A patent/JP6660108B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017015781A (ja) | 2017-01-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8960668B2 (en) | Sheet-discharge apparatus, sheet processing apparatus, and image forming apparatus | |
| JP5928532B2 (ja) | 画像形成装置 | |
| US8937740B2 (en) | Printing apparatus, printing apparatus control method, and storage medium | |
| US11370633B2 (en) | Sheet sorting apparatus and image forming apparatus | |
| US8091884B2 (en) | Transport device, overlap feed sign detection device, and computer readable medium | |
| US10308452B2 (en) | Image forming apparatus | |
| JP2007106559A (ja) | 画像形成装置、シート処理装置および画像形成システム | |
| US9802778B2 (en) | Image forming apparatus for forming image on sheet | |
| US20180275590A1 (en) | Image forming apparatus having function for detecting sheet conveyance delay | |
| US10379480B2 (en) | Image forming apparatus | |
| JP6637685B2 (ja) | 画像形成装置 | |
| JP6660108B2 (ja) | 画像形成装置 | |
| JP5546145B2 (ja) | 重送検知装置及び画像形成装置 | |
| CN107792711B (zh) | 后处理装置、控制方法以及图像形成系统 | |
| JP2011235985A (ja) | 画像形成装置 | |
| US8632071B2 (en) | Image forming apparatus | |
| JP6379958B2 (ja) | 排紙装置および印刷装置 | |
| JP2001002306A (ja) | 印刷した紙の積み重ね品位を上げる方法 | |
| US10118787B2 (en) | Sheet discharge device and image forming apparatus | |
| JP7409201B2 (ja) | 画像形成装置 | |
| JP5757858B2 (ja) | 給紙装置及び画像形成装置 | |
| JP2022141424A (ja) | 画像形成装置 | |
| JP2015030620A (ja) | 画像形成システム及びシート処理装置 | |
| JP5151386B2 (ja) | 用紙搬送制御装置、方法及びプログラム | |
| JP2018135203A (ja) | シート処理装置および方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180613 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180613 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190322 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190520 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190920 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200207 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6660108 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |