動力断接部としては、例えば複数の変速用係合装置によって変速比が異なる複数のギヤ段を成立させることができるとともに、動力伝達を遮断するニュートラル(中立状態)が可能な遊星歯車式や平行軸式等の有段の機械式変速部が適当であるが、クラッチ等の断接装置を設けるだけでも良い。有段の機械式変速部の複数のギヤ段は、変速比が1よりも大きい減速ギヤ段(アンダードライブ)、および変速比が1よりも小さい増速ギヤ段(オーバードライブ)の両方を含むように定めることもできるが、減速ギヤ段および増速ギヤ段の何れか一方のみを含むものでも良い。
電気式差動部の差動機構としては、シングルピニオン型或いはダブルピニオン型の単一の遊星歯車装置が好適に用いられる。この遊星歯車装置はサンギヤ、キャリア、およびリングギヤの3つの回転要素を備えているが、それ等の回転速度を直線で結ぶことができる共線図において、例えば中間に位置する回転速度が中間の回転要素(シングルピニオン型遊星歯車装置のキャリア、ダブルピニオン型遊星歯車装置のリングギヤ)に動力断接部の出力部材が連結され、両端の回転要素に第1回転機および駆動輪が連結されるが、中間の回転要素に駆動輪を連結するようにしても良い。駆動輪に連結される回転要素が出力要素である。この3つの回転要素は、常に差動回転可能であっても良いが、任意の2つをクラッチにより一体的に連結できるようにして、運転状態に応じて一体回転させるようにしたり、第1回転機が連結される回転要素をブレーキにより回転停止できるようにしたりして、差動回転を制限することも可能である。
回転機は回転電気機械のことで、具体的には電動モータ、発電機、或いはその両方の機能を択一的に用いることができるモータジェネレータである。第1回転機として発電機を採用し、第2回転機として電動モータを採用することもできるが、種々の運転状態を想定した場合、第1回転機、第2回転機の何れもモータジェネレータを用いることが望ましい。
エンジンと第1回転機とを接続、遮断する連結装置としては、クラッチ等の断接装置だけでも良いが、変速機を介して接続することもできる。切換判定部は、例えばアクセル操作量や車速等の運転状態をパラメータとして定められたモード切換マップ、或いはモード領域マップ等のモード切換条件に従って切換判断を行なう。バッテリの蓄電残量等の車両状態に応じて複数種類のモード切換条件を定めることもできるし、車両状態に応じて基本のモード切換条件を補正することもできる。そして、例えばアクセル操作量等の車両負荷に応じて3種類以上の走行モードに切り換えられる場合に、本発明は好適に適用される。
切換実行部は、予め定められた待機時間が経過したか否かを判断する待機制御部を有して構成される。待機時間は、予め一定時間が定められても良いが、アクセル操作量の変化率や車速等の運転状態、或いは切換後の走行モード、切換前後の走行モードなどによって可変設定されるようにしても良い。例えば、走行モードが連続して切り換えられる可能性が高い場合は、可能性が低い場合に比較して待機時間が長くなるように、モード切換条件等を考慮して定められる。車両負荷に応じて3種類以上の走行モードに切り換えられる場合に、車両負荷が中間の領域の走行モードへ切り換える時だけ待機時間を設定し、車両負荷が上限領域または下限領域の走行モードへの切換時には待機時間を設けることなく直ちに切換を実行しても良いなど、走行モードの切換の種類によって待機時間そのものを無くすこともできる。
切換実行部は、例えば待機中に切換判定部によって新たに別の走行モードへの切換判断が為された場合は、待機時間の経過を待つことなく直ちにその別の走行モードへ切り換える別モード切換部を有して構成されるが、待機中に別の走行モードへの切換判断が為されても、当初の待機時間を経過した後にその別の走行モードへ切り換えるようにしても良い。また、待機時間が経過した時に、切換判定部によって切換判断が為された最新の走行モードへ切り換えるようにしても良いなど、種々の態様が可能である。すなわち、待機中に切換判定部によって別の走行モードへの切換判断が為された場合に、その別の走行モードへ切り換える切換タイミングは適宜定められるし、待機中に切換判定部によって別の走行モードへの切換判断が為されたか否かの確認についても、必ずしも待機中に逐次行う必要はなく、待機時間が経過した後に確認するだけでも良い。待機時間が経過した時点で、切換判定部に対して最新の走行モードの切換判断を行わせるようにしても良い。
以下、本発明の実施例を、図面を参照して詳細に説明する。
図1は、本発明が適用されたハイブリッド車両10の走行に関与する概略構成を説明する骨子図で、走行モードの切換制御に関する制御系統の要部を併せて示した図である。図1において、ハイブリッド車両10は、走行用の駆動源として用いることができるエンジン12、第1モータジェネレータMG1、および第2モータジェネレータMG2を備えており、動力伝達装置14を介して駆動輪(前輪)16を回転駆動する。エンジン12は、例えばガソリンエンジンやディーゼルエンジン等、所定の燃料を燃焼させて動力を出力する内燃機関である。このエンジン12は、電子制御装置80によって吸入空気量、燃料供給量、点火時期等の作動状態が制御されることにより、エンジントルクTeが制御される。
第1モータジェネレータMG1および第2モータジェネレータMG2は、何れも電動モータおよび発電機(ジェネレータ)として択一的に用いることができる。第1モータジェネレータMG1および第2モータジェネレータMG2は、インバータ部や平滑コンデンサなどを有する電力制御ユニット18を介してバッテリユニット20に接続されており、電子制御装置80によって電力制御ユニット18が制御されることにより、第1モータジェネレータMG1、第2モータジェネレータMG2の各々のトルク(力行トルクまたは回生トルク)であるMG1トルクTmg1、MG2トルクTmg2が制御される。第1モータジェネレータMG1は第1回転機で、第2モータジェネレータMG2は第2回転機である。
動力伝達装置14は、FF(フロントエンジン・フロントドライブ)方式の車両用で、非回転部材であるトランスアクスルケース22内に、第1モータジェネレータMG1および第2モータジェネレータMG2と共に収容されている。動力伝達装置14は、エンジン12および第1モータジェネレータMG1の少なくとも一方の出力を駆動輪16へ伝達する第1動力伝達部24と、第2モータジェネレータMG2の出力を駆動輪16へ伝達する第2動力伝達部26とを備えている。第1動力伝達部24は、機械式変速部44および電気式差動部46を備えており、電気式差動部46の出力部材であるドライブギヤ28から、ドリブンギヤ30、ドリブン軸32、ファイナルギヤ34、デフリングギヤ36を介してディファレンシャル装置38に動力伝達され、一対の車軸40を介して左右の駆動輪16に分配される。
機械式変速部44および電気式差動部46は、エンジン12によって回転駆動される入力軸42と同軸に配置されており、機械式変速部44は、第1遊星歯車機構48、クラッチC1、およびブレーキB1を備えている。第1遊星歯車機構48は、差動回転可能な3つの回転要素として、サンギヤS1、ピニオンギヤP1を自転および公転可能に支持するキャリアCA1、およびピニオンギヤP1を介してサンギヤS1と噛み合うリングギヤR1を有するシングルピニオン型の遊星歯車機構で、キャリアCA1は入力軸42に一体的に連結されており、機械式変速部44の入力部材として機能する。サンギヤS1は、ブレーキB1を介してトランスアクスルケース22に選択的に連結されるようになっており、サンギヤS1およびキャリアCA1は、クラッチC1を介して互いに選択的に連結されるようになっている。リングギヤR1は、機械式変速部44の出力部材として機能する連結部材45を介して電気式差動部46に連結されている。
クラッチC1およびブレーキB1は、何れも油圧アクチュエータによって係合制御される多板型の油圧式摩擦係合装置であり、油圧制御回路52の油路切換弁や油圧制御弁が電子制御装置80によって制御されることにより、その油圧制御回路52から各々供給されるC1油圧Pc1、B1油圧Pb1に応じて係合、解放制御される。そして、クラッチC1およびブレーキB1が何れも解放されると、第1遊星歯車機構48の差動が許容され、サンギヤS1が自由回転してエンジントルクTeの反力トルクを取れないため、機械式変速部44は中立状態(ニュートラル状態)とされて動力伝達が不能な遮断状態となる。クラッチC1およびブレーキB1が何れも係合させられると、第1遊星歯車機構48は一体的に回転停止状態とされ、入力軸42を介してエンジン12が回転停止状態に保持される。クラッチC1が係合させられ且つブレーキB1が解放されると、第1遊星歯車機構48が一体回転させられるようになり、エンジン12の回転速度(エンジン回転速度)Neが等速で、すなわち変速比γ1=1で、リングギヤR1から連結部材45を介して電気式差動部46へ出力される。変速比γ1は、エンジン回転速度Ne/リングギヤR1の回転速度である。また、クラッチC1が解放され且つブレーキB1が係合させられると、サンギヤS1が回転停止させられることにより、リングギヤR1が入力軸42に対して増速回転させられるようになり、変速比γ1<1で連結部材45を介して電気式差動部46へ出力される。すなわち、機械式変速部44は、直結状態(変速比γ1=1)のローギヤと、オーバードライブ状態(変速比γ1<1)のハイギヤとに切り換えられる2段の有段変速機として機能する。クラッチC1およびブレーキB1は、変速用係合装置である。機械式変速部44は、動力伝達状態と遮断状態とに切り換えることができる動力断接部として機能する。
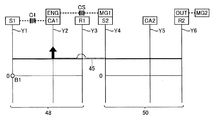
図3〜図9における左側に示す共線図は、上記機械式変速部44に関するもので、「ENG」はエンジン12である。この共線図は、第1遊星歯車機構48の3つの回転要素(サンギヤS1、キャリアCA1、リングギヤR1)の回転速度を直線で結ぶことができるもので、各回転要素を表す3本の縦線Y1〜Y3の間隔は、第1遊星歯車機構48のギヤ比(サンギヤS1の歯数/リングギヤR1の歯数)に応じて定まる。
電気式差動部46は、第2遊星歯車機構50を備えている。第2遊星歯車機構50は、差動回転可能な3つの回転要素として、サンギヤS2、ピニオンギヤP2を自転および公転可能に支持するキャリアCA2、およびピニオンギヤP2を介してサンギヤS2と噛み合うリングギヤR2を有するシングルピニオン型の遊星歯車機構であり、差動作用を生じる差動機構として機能する。キャリアCA2は、前記連結部材45に一体的に連結されており、電気式差動部46の入力部材として機能する。サンギヤS2は、差動制御用の第1モータジェネレータMG1のロータ軸54に一体的に連結されている。リングギヤR2は、電気式差動部46の出力部材として機能するドライブギヤ28に一体的に連結されている。本実施例では、キャリアCA2が第1回転要素で、サンギヤS2が第2回転要素で、リングギヤR2が第3回転要素であり、リングギヤR2は出力要素として機能する。
上記第1モータジェネレータMG1のロータ軸54は、直結クラッチCSを介して入力軸42に選択的に連結されるようになっている。直結クラッチCSは、油圧アクチュエータによって係合制御される多板型の油圧式摩擦係合装置であり、前記クラッチC1、ブレーキB1と同様に、油圧制御回路52の油路切換弁や油圧制御弁が電子制御装置80によって制御されることにより、その油圧制御回路52から供給されるCS油圧Pcsに応じて係合、解放制御される。この直結クラッチCSは、動力伝達を接続、遮断できる断接装置で、エンジン12と第1モータジェネレータMG1との間を接続、遮断する連結装置に相当する。
上記直結クラッチCSが解放されると、第2遊星歯車機構50の差動が許容される。この状態では、第2遊星歯車機構50は、キャリアCA2に入力される動力を第1モータジェネレータMG1およびリングギヤR2へ分配する動力分配機構として機能することが可能である。すなわち、電気式差動部46において、リングギヤR2へ分配される機械的な動力伝達に加え、第1モータジェネレータMG1に分配された動力で第1モータジェネレータMG1が回転駆動されることによって発電し、その発電した電力で第2モータジェネレータMG2を駆動したり、バッテリユニット20を充電したりすることができる。電気式差動部46は、電子制御装置80によって電力制御ユニット18が制御されて第1モータジェネレータMG1の運転状態が制御されることにより、変速比γ2(=キャリアCA2の回転速度/リングギヤR2の回転速度)を連続的に制御する電気式無段変速機として機能する。つまり、電気式差動部46は、差動機構としての第2遊星歯車機構50と、その第2遊星歯車機構50に動力伝達可能に連結された差動制御用回転機としての第1モータジェネレータMG1とを有し、第1モータジェネレータMG1の運転状態が制御されることにより第2遊星歯車機構50の差動状態が制御される電気式変速機構である。また、直結クラッチCSが係合させられた状態では、エンジン12と第1モータジェネレータMG1とが連結されるため、エンジン12の動力によって第1モータジェネレータMG1を回転駆動して発電し、その発電した電力でバッテリユニット20を充電したり第2モータジェネレータMG2を駆動したりすることが可能である。
図3〜図9における右側に示す共線図は、上記電気式差動部46に関するもので、「OUT」は出力部材として機能するドライブギヤ28である。この共線図は、第2遊星歯車機構50の3つの回転要素(サンギヤS2、キャリアCA2、リングギヤR2)の回転速度を直線で結ぶことができるもので、各回転要素を表す3本の縦線Y4〜Y6の間隔は、第2遊星歯車機構50のギヤ比(サンギヤS2の歯数/リングギヤR2の歯数)に応じて定まる。本実施例では、この共線図の中間に位置する回転要素、すなわち差動状態において回転速度が中間の速度になる回転要素であるキャリアCA2に連結部材45が連結されて、エンジン12から動力が入力されるようになっている。また、共線図の両側に位置する2つの回転要素(サンギヤS2およびリングギヤR2)の一方および他方に、第1モータジェネレータMG1、駆動輪16が動力伝達可能に連結されている。
このように構成された第1動力伝達部24においては、エンジン12の動力や第1モータジェネレータMG1の動力がドライブギヤ28からドリブンギヤ30へ伝達される。従って、エンジン12および第1モータジェネレータMG1は、第1動力伝達部24を介して駆動輪16に動力伝達可能に連結される。また、機械式変速部44は、直結状態またはオーバードライブ状態で動力伝達するため、第1モータジェネレータMG1の高トルク化が抑制される。
第1動力伝達部24では、機械式変速部44および電気式差動部46が直列に接続されているため、機械式変速部44を変速すれば第1動力伝達部24の全体の変速比γ0(=γ1×γ2)も変化させられる。そこで、機械式変速部44の変速時に第1動力伝達部24の変速比γ0の変化が抑制されるように、機械式変速部44の変速に合わせて電気式差動部46の変速を実行する。例えば、機械式変速部44がローギヤからハイギヤへアップシフトされる場合、それと同時に電気式差動部46をダウンシフトする。これにより、第1動力伝達部24は、全体として所謂電気式無段変速機として機能させることができる。
第2動力伝達部26は、入力軸42とは別にその入力軸42と平行に配置された第2モータジェネレータMG2のロータ軸56、およびそのロータ軸56に一体的に取り付けられてドリブンギヤ30と噛み合う小径のリダクションギヤ58を備えている。この第2動力伝達部26においては、第2モータジェネレータMG2の動力がリダクションギヤ58からドリブンギヤ30へ伝達され、ドリブン軸32、ファイナルギヤ34、およびデフリングギヤ36を介してディファレンシャル装置38に伝達される。すなわち、第2モータジェネレータMG2は、第1動力伝達部24の機械式変速部44および電気式差動部46を介することなく、駆動輪16に対して動力伝達可能に連結されており、リダクションギヤ58による減速比の設定の自由度が高く、その減速比を大きくとることができる。
ハイブリッド車両10は、走行に関わる各種の制御を行なうコントローラとして電子制御装置80を備えている。電子制御装置80は、例えばCPU、RAM、ROM、入出力インターフェース等を備えた所謂マイクロコンピュータを含んで構成されており、CPUはRAMの一時記憶機能を利用しつつ予めROMに記憶されたプログラムに従って信号処理を行うことにより、ハイブリッド車両10の各種制御を実行する。例えば、電子制御装置80は、エンジン12、第1モータジェネレータMG1、および第2モータジェネレータMG2の各出力制御や、複数の走行モードの切換制御等を実行するようになっており、必要に応じてエンジン制御用、MG制御用、油圧制御用等に分けて構成される。
電子制御装置80には、ハイブリッド車両10に設けられたエンジン回転速度センサ60、出力回転速度センサ62、レゾルバ等のMG1回転速度センサ64、レゾルバ等のMG2回転速度センサ66、アクセル操作量センサ68、シフトポジションセンサ70、バッテリセンサ72等による検出値に基づく各種の信号、すなわちエンジン回転速度Ne、車速Vに対応するドリブンギヤ30の回転速度である出力回転速度Nout、第1モータジェネレータMG1の回転速度(MG1回転速度)Nmg1、第2モータジェネレータMG2の回転速度(MG2回転速度)Nmg2、アクセルペダルの操作量(アクセル操作量)θacc、シフトレバーの操作位置Psh、バッテリユニット20のバッテリ温度THbatやバッテリ充放電電流Ibat、バッテリ電圧Vbatなど、制御に必要な各種の情報が供給される。また、電子制御装置80からは、エンジン12、電力制御ユニット18、油圧制御回路52などにエンジン制御指令信号Se 、MG制御指令信号Sm、油圧制御指令信号Spなどが出力される。電子制御装置80は、例えばバッテリ充放電電流Ibatおよびバッテリ電圧Vbatなどに基づいてバッテリユニット20の蓄電残量SOCを算出する。
電子制御装置80は、予め定められた切換条件に従って複数の走行モードを切り換えながら走行する走行モード切換制御部82を機能的に備えている。すなわち、本実施例のハイブリッド車両10は、図2に示す種々の走行モードで走行することが可能である。図2において、EV(Electric Vehicle)モードは、エンジン12の運転を停止した状態で、第1モータジェネレータMG1および第2モータジェネレータMG2の少なくとも一方を走行用駆動源として用いて走行する制御様式である。HV(Hybrid Vehicle)モードは、少なくともエンジン12を運転状態として、そのエンジン12のみを走行用駆動源として用いて走行したり、一定の条件下で第1モータジェネレータMG1および第2モータジェネレータMG2の少なくとも一方を走行用駆動源として用いて走行したりする制御様式である。そして、EVモードでは、更に単駆動モードおよび両駆動モードの2つの走行モードが定められており、HVモードでは、シリーズパラレルモード、パラレルモード、およびシリーズモードの3つの走行モードが定められている。
図2は、各走行モードにおけるクラッチC1、ブレーキB1、直結クラッチCS、モータジェネレータMG1、MG2の作動状態を説明する図である。図2の図中の「○」印は係合装置(C1,B1,CS)の係合を意味し、空欄は解放を意味し、「△」印は運転停止状態のエンジン12を連れ回し状態とするエンジンブレーキ(エンブレともいう)の併用時に何れか一方を係合させることを意味する。また、「G」はモータジェネレータMG1、MG2を主にジェネレータとして機能させることを意味し、「M」はモータジェネレータMG1、MG2を駆動時には主に電動モータとして機能させ、被駆動時には主にジェネレータとして機能させることを意味する。但し、HVのパラレルモードでは、高負荷時等にアシスト的にモータジェネレータMG1、MG2が電動モータとして作動させられ、低負荷時には作動停止(フリー回転状態)とされる。
各走行モードについて具体的に説明すると、EVの単駆動モードでは、クラッチC1、ブレーキB1、および直結クラッチCSを何れも解放した状態で、基本的に第2モータジェネレータMG2を走行用駆動源として用いて走行する。図3は、このEV単駆動モード時の共線図である。クラッチC1およびブレーキB1が解放されることで、第1遊星歯車機構48の差動が許容され、機械式変速部44は中立状態(ニュートラル状態)となって動力伝達が遮断される。機械式変速部44が中立状態とされると、リングギヤR1に連結されたキャリアCA2にてMG1トルクTmg1の反力トルクが取れないため、電気式差動部46も中立状態になり、第1動力伝達部24が全体として中立状態になる。この状態で、エンジン12の運転を停止させるとともに、第2モータジェネレータMG2から走行用のMG2トルク(力行トルク)Tmg2を出力させる。後進時は、前進時に対して第2モータジェネレータMG2を逆回転させる。車両走行中には、第2モータジェネレータMG2の回転(ここでは駆動輪16の回転も同意)に連動してドライブギヤ28に連結されたリングギヤR2が回転させられる。EV単駆動モードでは、第1モータジェネレータMG1を無負荷として空転させても良いが、第1モータジェネレータMG1における引き摺り損失等を低減するために、MG1回転速度Nmg1をゼロ(回転停止状態)に維持することが望ましい。例えば、第1モータジェネレータMG1をジェネレータとして機能させて、フィードバック制御によりMG1回転速度Nmg1をゼロとすることができる。或いは、第1モータジェネレータMG1の回転が固定されるように電流供給するd軸ロック制御(d−q軸座標系におけるd軸電流のみを供給する制御)を実行して、MG1回転速度Nmg1をゼロに維持することもできる。また、MG1トルクTmg1をゼロとしても第1モータジェネレータMG1のコギングトルクによりMG1回転速度Nmg1をゼロに維持できるときはMG1トルクTmg1を加える必要はない。なお、MG1回転速度Nmg1をゼロに維持する制御を行っても、第1動力伝達部24は中立状態であるので、駆動トルクに影響を与えない。
上記EV単駆動モードではまた、リングギヤR1がキャリアCA2と一体的に連れ回されるが、機械式変速部44は中立状態であるので、運転が停止されたエンジン12は連れ回されずゼロ回転で停止状態とされる。よって、EV単駆動モードでの走行中に第2モータジェネレータMG2を回生制御(発電制御ともいう)する場合、回生量を大きく取ることができる。EV単駆動モードでの走行時に、バッテリユニット20が満充電状態となり回生エネルギーが取れない場合、エンジンブレーキを併用することが考えられる。エンジンブレーキを併用する場合は、ブレーキB1またはクラッチC1が係合させられる(図2のEV単駆動モードのエンブレ併用を参照)。ブレーキB1またはクラッチC1が係合させられると、エンジン12は連れ回し状態とされて、エンジンブレーキが作用させられる。MG1回転速度Nmg1を上昇させることで、エンジン12の連れ回し状態におけるエンジン回転速度Neを上昇させることができる。
上述したように、ブレーキB1またはクラッチC1を係合させることでエンジン回転速度Neを上昇させることができるので、EVモードからエンジン12を始動するときには、ブレーキB1またはクラッチC1を係合した状態として、必要に応じて第1モータジェネレータMG1によりエンジン回転速度Neを引き上げて点火する。このとき、第2モータジェネレータMG2に反力キャンセルトルクを追加で出力させる。なお、車両停止時にエンジン12を始動する際には、ブレーキB1またはクラッチC1を係合した状態で第1モータジェネレータMG1によりキャリアCA2の回転を引き上げることでエンジン回転速度Neを上昇させても良いし、第1モータジェネレータMG1によりキャリアCA2の回転を引き上げてからブレーキB1またはクラッチC1を係合させることでエンジン回転速度Neを上昇させても良い。
図2において、EVの両駆動モード(「Ne=0」)では、クラッチC1およびブレーキB1を何れも係合させるとともに、直結クラッチCSを解放した状態で、モータジェネレータMG1およびMG2を共に走行用駆動源として用いて走行する。図4は、このEV両駆動モード時の共線図である。クラッチC1およびブレーキB1が係合させられることにより、第1遊星歯車機構48の差動が規制され、サンギヤS1の回転が停止させられる。そのため、第1遊星歯車機構48は何れの回転要素も回転が停止させられる。これによって、エンジン12はゼロ回転で停止状態とされ、また、連結部材45を介してリングギヤR1に連結されたキャリアCA2の回転も停止させられる。キャリアCA2の回転が停止させられると、キャリアCA2にてMG1トルクTmg1の反力トルクが取れるため、MG1トルク(ここでは逆回転方向の力行トルク)Tmg1によりリングギヤR2から機械的に駆動力を出力させて駆動輪16へ伝達することができる。すなわち、エンジン12の運転を停止させるとともに、第1モータジェネレータMG1および第2モータジェネレータMG2から各々走行用のMG1トルクTmg1およびMG2トルクTmg2を出力させる。このEV両駆動モードでは、前進時に対して第1モータジェネレータMG1および第2モータジェネレータMG2を共に逆回転させて後進走行することも可能である。なお、EVの両駆動モードでは、直結クラッチCSを係合させるとともに、クラッチC1およびブレーキB1の何れか一方を係合させることにより、機械式変速部44をハイギヤまたはローギヤに保持した状態で、エンジン12を所定の回転速度で連れ回し回転させつつ、モータジェネレータMG1およびMG2を共に走行用駆動源として用いて走行することも可能である。
上記EV両駆動モードは、第2モータジェネレータMG2のみで要求駆動トルクを賄える場合であっても、MG2回転速度Nmg2およびMG2トルクTmg2で表される第2モータジェネレータMG2の動作点が第2モータジェネレータMG2の効率を悪化させる領域内にある場合、言い換えれば第1モータジェネレータMG1および第2モータジェネレータMG2を併用した方が効率が良い場合には、EV両駆動モードが選択される。EV両駆動モードでは、第1モータジェネレータMG1および第2モータジェネレータMG2の運転効率に基づいて、第1モータジェネレータMG1および第2モータジェネレータMG2にて要求駆動トルクを分担させる。
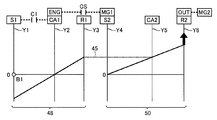
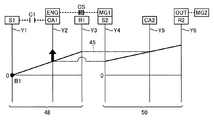
図2において、HVのシリーズパラレルモードでは、直結クラッチCSを解放するとともに、クラッチC1およびブレーキB1の何れか一方を係合させることにより、機械式変速部44をハイギヤまたはローギヤに保持した状態で、エンジン12を運転(作動)させるとともに第2モータジェネレータMG2を力行制御することにより、何れも走行用駆動源として用いて走行する。図5は、このシリーズパラレルモードにおいて機械式変速部44がハイギヤとされた場合の共線図で、図6は、シリーズパラレルモードにおいて機械式変速部44がローギヤとされた場合の共線図である。クラッチC1またはブレーキB1が係合させられることで機械式変速部44が非中立状態、すなわち動力伝達状態とされ、キャリアCA2に伝達されたエンジン12の動力に対する反力を第1モータジェネレータMG1で受け持つことにより、エンジントルクTe の一部(エンジン直達トルク)をリングギヤR2から機械的に出力させて駆動輪16へ伝達することができる。第1モータジェネレータMG1は、回生制御されてジェネレータとして用いられ、上記反力を受け持つことができるとともに、発電した電力で第2モータジェネレータMG2を力行制御してMG2トルクTmg2を出力させる。なお、このシリーズパラレルモードでは、前進時に対して第2モータジェネレータMG2を逆回転させることにより後進走行することも可能である。
ここで、MG1回転速度Nmg1がゼロとなり、エンジン12の動力が電気パス(第1モータジェネレータMG1や第2モータジェネレータMG2の電力授受に関わる電気経路である電気的な動力伝達経路)を介することなく全て機械的にドライブギヤ28へ伝達される状態になる所謂メカニカルポイントでは、電気式差動部46の動力伝達効率(出力されたパワー/入力されたパワー)の理論値(理論伝達効率)が最大の「1」となる。このメカニカルポイントは、図5、図6の共線図において電気式差動部46のMG1回転速度Nmg1がゼロとなる状態(すなわちサンギヤS2の回転速度がゼロとなる状態)である。シリーズパラレルモードでは、機械式変速部44がハイギヤとローギヤとに切り換えられることでメカニカルポイントが2つになり、ハイギヤのシリーズパラレルモードを有することでメカニカルポイントが高車速側に増えるため、高速燃費が向上する。すなわち、図10、図11の走行モードの切換マップから明らかなように、ハイギヤのシリーズパラレルモード(シリーズパラレルハイ)は、比較的高車速側で選択されるようになっており、高車速側のメカニカルポイントが増えて高速燃費が向上するのである。
また、上記シリーズパラレルモードでは、MG1回転速度Nmg1に応じてキャリアCA2の回転速度、更にはエンジン回転速度Neを制御できるため、例えばエンジン12の最適燃費線を考慮したエンジン動作点(すなわちエンジン回転速度NeとエンジントルクTeとで表されるエンジン動作点)にてエンジン12を作動させることもできる。また、シリーズパラレルモードでは、第1モータジェネレータMG1の発電電力にバッテリユニット20からの電力を加えて第2モータジェネレータMG2を駆動することも可能である。
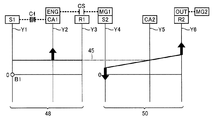
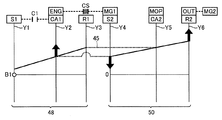
図2において、HVのパラレルモードでは、直結クラッチCSを係合させるとともに、クラッチC1およびブレーキB1の何れか一方を係合させることにより、機械式変速部44をハイギヤまたはローギヤに保持した状態で、エンジン12を運転(作動)させるとともに、必要に応じて第1モータジェネレータMG1および/または第2モータジェネレータMG2を力行制御することにより、それ等を走行用駆動源として用いて走行する。図7は、このパラレルモードにおいて機械式変速部44がハイギヤとされた場合の共線図で、図8は、パラレルモードにおいて機械式変速部44がローギヤとされた場合の共線図であり、何れもエンジン12のみが走行用駆動源として用いられているが、このまま第1モータジェネレータMG1および/または第2モータジェネレータMG2を力行制御することにより走行用駆動源として用いることができる。
上記パラレルモードでは、直結クラッチCSの係合によるエンジン12と第1モータジェネレータMG1との連結に加えて、クラッチC1またはブレーキB1が係合させられることで、機械式変速部44の変速比γ1に応じて第1動力伝達部24の全体の変速比γ0が固定される。これにより、車速V(出力回転速度Nout)に対してエンジン回転速度Neが一意的に決められる。このパラレルモードでは、エンジン12、第1モータジェネレータMG1、および第2モータジェネレータMG2の何れの動力も駆動輪16へ機械的に伝達することが可能である。例えば、パラレルモードの単駆動時には、エンジン12の動力に加えて、第2モータジェネレータMG2の動力を駆動輪16へ伝達して走行する。パラレルモードの両駆動時には、エンジン12の動力に加えて、第1モータジェネレータMG1の動力および第2モータジェネレータMG2の動力を駆動輪16へ伝達して走行する。
パラレルモードにおける各係合装置(C1,B1,CS)の作動状態は、図2に示したEV両駆動モード(Neフリー)と同じである。つまり、図7および図8の共線図は、エンジン12の運転を停止させれば、EV両駆動モード(Neフリー)の共線図と同じになる。このEV両駆動モード(Neフリー)は、EV両駆動モード(Ne=0)と同様に、第1モータジェネレータMG1の動力および第2モータジェネレータMG2の動力を駆動輪16へ伝達して走行することが可能である。しかしながら、EV両駆動モード(Neフリー)は、走行中には、車速Vに応じてエンジン回転速度Neが一意的に決まるため、エンジン回転速度Neをゼロとすることができない点が、EV両駆動モード(Ne=0)と異なる。
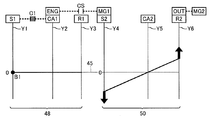
図2において、HVのシリーズモードでは、直結クラッチCSを係合させるとともに、クラッチC1およびブレーキB1を何れも解放した状態で、エンジン12の運転により第1モータジェネレータMG1を回転駆動して発電し、その発電した電力で第2モータジェネレータMG2を力行制御することにより、その第2モータジェネレータMG2を走行用駆動源として用いて走行する。図9は、このシリーズモード時の共線図である。クラッチC1およびブレーキB1が共に解放されることで、第1遊星歯車機構48の差動が許容され、機械式変速部44は中立状態とされる。従って、電気式差動部46は中立状態とされ、第1動力伝達部24も中立状態とされる。加えて、シリーズモードでは、直結クラッチCSが係合させられることで、エンジン12と第1モータジェネレータMG1とが連結される。そのため、エンジン12を作動させることで第1モータジェネレータMG1を回転駆動して発電をすることができる。この際、第1動力伝達部24は中立状態であるので、エンジントルクTeは機械的に駆動輪16へ伝達されない。エンジン12の動力によって第1モータジェネレータMG1を回転駆動し、その第1モータジェネレータMG1を回生制御して発電させることにより、その発電電力で第2モータジェネレータMG2を駆動して走行用のMG2トルクTmg2を出力させることができる。シリーズモードでは、前進時に対して第2モータジェネレータMG2を逆回転させて後進走行することも可能である。
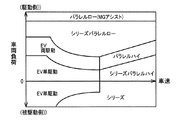
前記走行モード切換制御部82は、図2に示す複数の走行モードを切り換えながら走行するもので、走行モード切換制御装置に相当し、切換判定部84および切換実行部86を機能的に備えている。切換判定部84は、例えば図10および図11に示すモード切換マップ等のモード切換条件に従って複数の走行モードの切換判断を行なう。モード切換マップは、アクセル操作量θacc等の車両負荷および車速Vをパラメータとして選択すべき走行モードの領域が、実験やシミュレーション等によって予め定められており、電子制御装置80の記憶部に予め記憶されている。図11は、バッテリ温度THbatや蓄電残量SOCなどによってバッテリユニット20とモータジェネレータMG1、MG2との間の入出力(充放電)が制限されている場合のモード切換マップである。また、図10は、そのような入出力制限が無い場合、すなわちモータジェネレータMG1、MG2によるトルクアシストや発電によるバッテリユニット20に対する充電等を比較的自由に行なうことができる場合のモード切換マップである。
バッテリユニット20の入出力制限がある図11のモード切換マップの場合、車両負荷が正(駆動状態)で比較的小さく且つ低車速時にはシリーズモードが選択される。このシリーズモードは、第2モータジェネレータMG2とデフリングギヤ36との間のガタ打ちによる所謂ガラ音の防止にも有効である。そして、車速Vの上昇に伴ってパラレルハイモード或いはシリーズパラレルハイモードへ移行する。パラレルハイモードでは変速比γ0が固定されるため、エンジン12が最小燃費動作点から外れ易く、比較的狭い車両負荷領域に設定される。また、車両負荷が大きくなると、シリーズパラレルローモードへ移行する。駆動力が優先される場合に有効な走行モードである。一方、車両負荷が負(被駆動状態)の場合はシリーズモードとする。シリーズモードは、同一車速においてエンジン回転速度Neを任意に制御可能であるため、運転者の要求に応じたエンジンブレーキトルクを出力可能である。また、MG1回転速度Nmg1とエンジン回転速度Neとが同一であるため、他の走行モードに比べて、MG1回転速度Nmg1の上限によるエンジン回転速度Neの制約を受けにくく、エンジンブレーキトルクの絶対値を大きくできる。
バッテリユニット20の入出力制限が無い図10のモード切換マップの場合、車両負荷が正(駆動状態)で且つ低車速の領域では、エンジン12の作動を停止してモータジェネレータMG1、MG2により走行するEVモードが選択される。車両負荷が小さい領域では、第2モータジェネレータMG2だけで走行するEV単駆動モードが選択され、比較的高負荷側では、モータジェネレータMG1およびMG2の両方で走行するEV両駆動モードとする。このEVモードを外れると、エンジン12を始動してHVモードへ移行するが、エンジン始動時のショックを小さくするため、始動時の反力補償分のトルクを残してEVモードを実行する。HVモードとしては、図11と同様にシリーズパラレルハイモード、パラレルハイモード、シリーズパラレルローモードが選択されるが、図10の場合、バッテリユニット20の入出力制限が無いため、車両負荷が大きい領域でモータジェネレータMG1および/またはMG2によるトルクアシスト(MGアシスト)を行なうパラレルローモードが選択される。アクセル操作量θaccが急増するキックダウン時に、モード切換マップに優先してMGアシストを行なうパラレルローモードが実施されるようにしても良い。一方、車両負荷が負(被駆動状態)の場合も、低車速領域でEVモードが選択されるが、車両駆動トルクを発生させないため、そのEVモード領域を広くできる。
前記切換判定部84は、図10または図11のモード切換マップに従って選択した走行モードが現在の走行モードと違うか否かを判断し、違う場合にその選択した走行モードへ切り換えるべき切換判断を行なう。そして、切換実行部86は、図12のフローチャートのステップS1〜S7(以下、単にS1〜S7という)に従って信号処理を行なうことにより、上記切換判断が為された走行モードへ切り換える。切換実行部86は機能的に待機制御部および別モード切換部を備えており、図12のS2およびS3は待機制御部に相当し、S5およびS6は別モード切換部に相当する。
図12のS1では、前記切換判定部84によって走行モードの切換判断が為されたか否かを判断する。切換判断が行なわれていない場合はそのまま終了するが、切換判断が行なわれた場合は、S2以下のモード切換制御を実行する。S2では、待機時間Tmodeを設定する。この待機時間Tmodeは、走行モードが短時間の間に連続して切り換えられる多重切換を抑制するためのもので、予め一定時間が定められても良いが、例えば図13に示す設定マップに従って設定される。図13の設定マップは、アクセル操作量θaccの変化率(アクセル変化率)Δθaccをパラメータとして、実験やシミュレーション等により予め定められたもので、電子制御装置80の記憶部に予め記憶されている。具体的には、アクセル変化率Δθaccの絶対値が大きい場合、すなわち車両負荷の変化が大きい場合には、前記図10、図11の切換マップから明らかなように走行モードが短時間で切り換えられる可能性が高くなるため、アクセル変化量Δθaccが小さい場合に比較して待機時間Tmodeが長くされている。また、アクセル変化率Δθaccが正(+)の踏込み操作時、すなわち加速要求時には、アクセル変化率Δθaccが負(−)の戻し操作時、すなわち減速要求時に比較して、待機時間Tmodeを長くするといったように、アクセル変化率Δθaccの方向によって待機時間Tmodeの設定を変えてもよい。
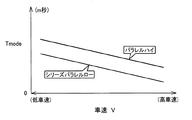
上記待機時間Tmodeは、図14に示す設定マップに従って設定されるようにすることもできる。図14の設定マップは、車速Vをパラメータとして実験やシミュレーション等により予め定められたもので、電子制御装置80の記憶部に予め記憶されている。具体的には、車速Vが高車速の場合は、低車速の場合に比較して待機時間Tmodeを短くするといったように、車速Vによって待機時間Tmodeの設定を変えてもよい。また、切換判断時に選択された切換先の走行モードによっても待機時間Tmodeが相違する。例えばパラレルハイモードは、図10、図11の切換マップにおいて車両負荷の中間の領域で且つ比較的狭いため、短時間で上下の走行モードへ切り換えられる可能性があることから、車両負荷が大きい領域のシリーズパラレルローモードに比較して待機時間Tmodeが長くされている。
前記アクセル変化率Δθacc、車速V、切換先の走行モードの全部に基づいて総合的に待機時間Tmodeを算出したり、待機時間Tmodeとしてそれ等の最大値を選択したりしても良い。また、図示は省略するが、切換の種類、すなわち切換前後の走行モードに基づいて、待機時間Tmodeを設定することもできる。すなわち、切換前後でクラッチC1、CS、ブレーキB1の係合状態やエンジン12の運転状態等の変化が少ない時は、比較的短時間で走行モードを切り換えることができることから、スムーズさを優先して遅延を避けるため、待機時間Tmodeを短くしても良い。例えばシリーズパラレルハイモードからシリーズパラレルローモードへ切り換える場合は、機械式変速部44の変速だけで良いため待機時間Tmodeを短くし、シリーズパラレルハイモードからパラレルハイモードへ切り換える場合は、直結クラッチCSおよび第1モータジェネレータMG1の作動状態を変更する必要があるため待機時間Tmodeを長くする。走行モードの切換の種類によっては、Tmode=0とすることも可能である。このように、待機時間Tmodeの設定方法は、走行モードの種類やモード切換マップ等を考慮して適宜定められる。
図12に戻って、次のS3では、走行モードの切換判断が為された後の経過時間Tmが、S2で設定された待機時間Tmodeを超えたか否かを判断する。経過時間Tmは、タイマやカウンタなどで計測することができる。そして、Tm>Tmodeになったら、S7で走行モードの切換を実行するが、Tm≦Tmodeの間はS4以下を実行する。S4では、走行モードを切り換えるためのモード切換指令の出力を保留し、S1で切換判断が為された時の現状の走行モードを継続する。具体的には、クラッチC1、CS、ブレーキB1の係合状態を変更するための油圧切換指令や、エンジン12の始動或いは停止のための指令、モータジェネレータMG1、MG2の力行、回生を切り換えたり回転速度Nmg1、Nmg2を変更したりする指令、の出力を保留する。また、S5では、前記切換判定部84で新たに別の走行モードへの切換判断が為されたか否かを判断し、別の走行モードへの切換判断が為されていない場合、すなわちS1の段階で切換判断が為された当初の切換先の走行モードのままであれば、S3以下を繰り返し実行するが、別の走行モードへの切換判断が為された場合はS6を実行し、その新たな別の走行モードへ切り換えるためのモード切換(飛びモード切換)を直ちに実行する。
すなわち、経過時間Tmが待機時間Tmodeを超える前に、切換判定部84で新たに別の走行モードへの切換判断が為された場合は、S1の段階で判断された当初の走行モードへの切換をキャンセルし、その新たな別の走行モードへ直ちに切り換えるのであり、短時間の間に連続して走行モードを切り換える多重切換が防止される。また、経過時間Tmが待機時間Tmodeを経過してS3の判断がYES(肯定)になった場合に実行するS7では、待機時間Tmode中に別の走行モードへの切換判断が為されなかったため、S1で切換判断が為された当初の走行モードへ切り換える。
図15は、図12のフローチャートに従って走行モードの切換制御が行われた場合の各部の作動状態の変化を説明するタイムチャートの一例で、シリーズパラレルハイモードで走行中にアクセルペダルが増し踏み操作されてパラレルハイモードへ切り換えられた場合である。時間t1は、アクセルペダルの増し踏み操作が開始された時間で、時間t2は、アクセル操作量θaccの増大に伴ってパラレルハイモードへの切換判断が為された時間、すなわち図12のS1の判断がYESになった時間である。時間t3は、新たに別の走行モードへの切換判断が為されることなく待機時間Tmodeが経過し、S3の判断がYESになってS7が実行され、パラレルハイモードへの切換指令が出力された時間である。このパラレルハイモードへの切換制御は、先ず、MG1回転速度Nmg1がパラレルハイモードにおける同期回転速度となるように、そのMG1トルク(回生トルク)Tmg1を制御する。この時、同時にエンジン回転速度Neが低下させられ、MG1回転速度Nmg1がエンジン回転速度Neと一致する同期回転速度になったら(時間t4)、CS油圧Pcsを供給して直結クラッチCSを係合させる。時間t5は、直結クラッチCSが完全に係合させられた時間で、その後、MG1トルクTmg1が回生から力行へ切り換えられて、エンジン12、第1モータジェネレータMG1、および第2モータジェネレータMG2が何れも走行用駆動源として用いられる両駆動のパレラルハイモードが成立する。
このように本実施例のハイブリッド車両10においては、エンジン12と第1モータジェネレータMG1とを直結クラッチCSによって接続できるため、その直結クラッチCSを接続状態にするとともに機械式変速部44を遮断状態(中立状態)とすることで、エンジン12により第1モータジェネレータMG1を回転駆動して発電するとともに、その発電電力により第2モータジェネレータMG2を力行制御して走行するシリーズモードが可能になるなど、選択できる走行モードの種類が増えて燃費性能や動力性能を一層向上させることができる。
一方、走行モードの種類が増えると走行モードの切換頻度が高くなるが、切換判定部84によりモード切換マップ等のモード切換条件に従って走行モードの切換判断が為された場合に、予め定められた待機時間Tmodeが経過したか否かを判断し(S3)、待機時間Tmodeが経過した後にS7で走行モードの切換が実行される一方、待機中に別の走行モードへの切換判断が為された場合は、S6でその別の走行モードへ切り換えられるため、走行モードの多重切換が抑制される。その場合に、本実施例では待機時間Tmodeがアクセル変化率Δθaccや車速V、切換先の走行モード、切換の種類等によって可変設定されるため、多重切換を抑制しつつモード切換の遅延をできるだけ短くすることができる。
また、本実施例では、待機時間Tmodeが経過する前に切換判定部84で新たに別の走行モードへの切換判断が為されると、S6を実行し、当初の走行モードへの切換をキャンセルして新たな別の走行モードへ切り換える飛びモード切換を直ちに実行するため、多重切換を抑制しつつ最適な走行モードへ速やかに切り換えることができる。
なお、上記実施例では、S5およびS6が設けられ、待機中に別の走行モードへの切換判断が為された場合には、その別の走行モードへの飛びモード切換を直ちに実行するようになっていたが、例えばそれ等のS5およびS6を省略し、待機時間Tmodeを経過してS7を実行する際に、切換判定部84で判断される最新の走行モードを読み込み、その最新の走行モードへ切り換えるようにしても良い。
また、前記実施例では、第2モータジェネレータMG2が第1動力伝達部24の軸心とは別の軸心上に配置されるような連結関係のギヤトレーンであったが、例えば第2モータジェネレータMG2が第1動力伝達部24の軸心と同じ軸心上に配置されるような連結関係のギヤトレーンなどであっても良い。
また、FF方式のハイブリッド車両10に好適に用いられる動力伝達装置14を例として説明したが、本発明は、FR方式やRR方式、4輪駆動方式のハイブリッド車両にも適用することができる。第2モータジェネレータMG2が、エンジン12によって駆動される駆動輪16とは異なる駆動輪(後輪)を駆動する4輪駆動方式のハイブリッド車両に適用することもできる。
以上、本発明の実施例を図面に基づいて詳細に説明したが、これはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。