JP6156243B2 - ハイブリッド車両の制御装置 - Google Patents
ハイブリッド車両の制御装置 Download PDFInfo
- Publication number
- JP6156243B2 JP6156243B2 JP2014084386A JP2014084386A JP6156243B2 JP 6156243 B2 JP6156243 B2 JP 6156243B2 JP 2014084386 A JP2014084386 A JP 2014084386A JP 2014084386 A JP2014084386 A JP 2014084386A JP 6156243 B2 JP6156243 B2 JP 6156243B2
- Authority
- JP
- Japan
- Prior art keywords
- torque
- engine
- motor
- clutch
- capacity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000005540 biological transmission Effects 0.000 claims description 92
- 230000007246 mechanism Effects 0.000 claims description 39
- 230000008859 change Effects 0.000 description 14
- 230000007423 decrease Effects 0.000 description 10
- 230000006870 function Effects 0.000 description 8
- 230000009467 reduction Effects 0.000 description 7
- 238000000034 method Methods 0.000 description 6
- 238000000926 separation method Methods 0.000 description 6
- 230000003247 decreasing effect Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000035939 shock Effects 0.000 description 3
- 230000002159 abnormal effect Effects 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 238000010248 power generation Methods 0.000 description 2
- 238000005086 pumping Methods 0.000 description 2
- 230000008929 regeneration Effects 0.000 description 2
- 238000011069 regeneration method Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 1
- 230000009699 differential effect Effects 0.000 description 1
- 230000008278 dynamic mechanism Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000007659 motor function Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/50—Control strategies for responding to system failures, e.g. for fault diagnosis, failsafe operation or limp mode
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/38—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the driveline clutches
- B60K6/387—Actuated clutches, i.e. clutches engaged or disengaged by electric, hydraulic or mechanical actuating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/02—Conjoint control of vehicle sub-units of different type or different function including control of driveline clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/24—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means
- B60W10/26—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means for electrical energy, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/13—Controlling the power contribution of each of the prime movers to meet required power demand in order to stay within battery power input or output limits; in order to prevent overcharging or battery depletion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/40—Controlling the engagement or disengagement of prime movers, e.g. for transition between prime movers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/029—Adapting to failures or work around with other constraints, e.g. circumvention by avoiding use of failed parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/032—Fixing failures by repairing failed parts, e.g. loosening a sticking valve
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H48/00—Differential gearings
- F16H48/06—Differential gearings with gears having orbital motion
- F16H48/10—Differential gearings with gears having orbital motion with orbital spur gears
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
- B60K2006/4825—Electric machine connected or connectable to gearbox input shaft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/0205—Diagnosing or detecting failures; Failure detection models
- B60W2050/022—Actuator failures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/029—Adapting to failures or work around with other constraints, e.g. circumvention by avoiding use of failed parts
- B60W2050/0297—Control Giving priority to different actuators or systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/02—Clutches
- B60W2510/0275—Clutch torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/08—Electric propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/18—Propelling the vehicle
- B60Y2300/18008—Propelling the vehicle related to particular drive situations
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/946—Characterized by control of driveline clutch
Description
この発明は、駆動輪に伝達するトルクを発生させるエンジンおよびモータと、それらエンジンとモータとのトルクの伝達を選択的に遮断することができる係合装置とを備えたハイブリッド車両の制御装置に関するものである。
特許文献1には、エンジンと第1モータとの出力トルクを駆動輪に伝達するように構成されたハイブリッド車両が記載されている。このハイブリッド車両は、エンジンの出力軸にクラッチを介して連結された第1回転部材と、第1モータが連結された第2回転部材と、駆動輪に連結された第3回転部材とを有する差動機構を備え、また、動力伝達経路における第3回転部材よりも駆動輪側にトルクを伝達することができる第2モータを備えている。したがって、特許文献1に記載されたハイブリッド車両は、クラッチを係合してエンジンの動力と第2モータの動力とを駆動輪に伝達するハイブリッド走行と、クラッチを解放して第2モータの動力のみを駆動輪に伝達するEV走行とを選択的に切り替えることができる。
特許文献2ないし5には、エンジンとモータとのトルクの伝達を選択的に遮断するクラッチを備えたハイブリッド車両の制御装置が記載されている。特許文献2に記載された制御装置は、エンジンとモータとのトルクの伝達を遮断することができないフェールが生じた場合に、二次的な故障が生じることを抑制するために、モータの動力のみを駆動輪に伝達するEV走行を禁止するように構成されている。
また、特許文献3には、エンジンとモータとの間にクラッチが設けられるとともに、モータとクラッチとの間にギヤトレーン部が連結され、そのギヤトレーン部が駆動輪に直列的に連結されたハイブリッド車両が記載されている。このハイブリッド車両は、エンジンの動力をモータに伝達することにより、モータが発電機として機能するように構成されている。そのため、特許文献3に記載された制御装置は、エンジンとモータとのトルクの伝達を遮断することができないフェールが生じている際におけるバッテリの充電残量が過剰に低下することを抑制するために、バッテリの放電量を低減するとともに、バッテリの充電量が低下したことを判断するために予め定められた下限閾値を高くするように構成されている。
さらに、特許文献4には、エンジンの出力軸にクラッチを介してモータが連結され、そのモータの出力軸に変速機構が連結されたハイブリッド車両が記載されている。このように構成されたハイブリッド車両は、エンジンとモータとのトルクの伝達を遮断することができないフェールが生じた場合に、モータの動力のみを駆動輪に伝達して走行すると、エンジンを連れ回すことによる動力損失が大きくなる。したがって、走行状態を維持するためには、モータから出力する動力が大きくなる。その結果、モータの出力が大きくなって消費電力量が多くなることにより、モータのみの動力により走行することができる距離が短くなる。そのため、特許文献4に記載された制御装置は、エンジンとモータとのトルクの伝達を遮断することができないフェールが生じた場合には、モータの動力のみで走行する条件が成立したときであっても、エンジンを連れ回すことによる動力損失を低減するために、エンジンを自立回転させるように構成されている。なお、バッテリの充電量が比較的多い場合には、エンジンを駆動せずにモータの動力のみで走行するように構成されている。
またさらに、特許文献5には、エンジンの出力軸にジェネレータが設けられ、そのジェネレータの出力軸にクラッチを介して駆動輪が連結され、また、ジェネレータにより発電された電力が供給されて動力を出力するモータが、クラッチの出力側に連結されたハイブリッド車両が記載されている。このハイブリッド車両の制御装置は、クラッチを解放させることができないフェールが生じた場合には、エンジンの動力をジェネレータが回生してモータに伝達しかつそのモータの動力のみを駆動輪に伝達する、いわゆるシリーズ方式による走行モードを禁止するように構成されている。一方、クラッチを係合させることができないフェール、より具体的には、クラッチがスリップするなど完全に係合することができないフェールが生じた場合には、エンジンを駆動せずに、バッテリから供給される電力のみによりモータを駆動させ、そのモータの動力のみを駆動輪に伝達して走行するように構成されている。
なお、特許文献6には、エンジンの出力軸にマニュアル式のクラッチを介して変速機構の入力軸が連結され、かつその変速機構の出力軸にモータが連結されたハイブリッド車両の制御装置が記載されており、クラッチを操作するクラッチペダルのセンサに異常が生じた場合に、モータの動力のみを駆動輪に伝達するEV走行モードを禁止し、またはモータの出力トルクを制限するように構成されている。
ところで、クラッチを完全に係合させることができないフェールが生じている際に、特許文献5に記載されたようにモータの動力のみを駆動輪に伝達して走行すると、モータに電力を供給する蓄電装置の充電残量が低下するので、上記のようなフェールが生じている状態で走行することができる距離が短くなる可能性がある。
この発明は上記の技術的課題に着目してなされたものであり、エンジンとモータとの間に設けられたクラッチの伝達トルク容量を変化させることができないフェールが生じている状態での走行距離を長くすることができるハイブリッド車両の制御装置を提供することを目的とするものである。
上記の目的を達成するために、請求項1の発明は、駆動輪に伝達するためのトルクを発生させるエンジンおよびモータと、解放することにより前記エンジンと前記モータとのトルクの伝達を遮断するとともに、前記エンジンと前記駆動輪とのトルクの伝達を遮断する係合装置とを備え、前記係合装置を介して前記エンジンにトルクを伝達することにより前記エンジンをクランキングさせるように構成されたハイブリッド車両の制御装置において、前記係合装置の伝達トルク容量を変化させることができないフェールが生じていることを判断する判断手段と、前記係合装置の伝達トルク容量を推定する推定手段と、前記判断手段により前記フェールが生じていると判断された際に前記推定手段により推定された前記係合装置の伝達トルク容量が、前記エンジンをクランキングさせるためのトルクを伝達することができる伝達トルク容量以上の場合に、前記エンジンの出力トルクを前記駆動輪に伝達して走行する第1走行モードを選択し、前記判断手段により前記フェールが生じていると判断され、かつ前記推定手段により推定された前記係合装置の伝達トルク容量が、前記エンジンをクランキングさせるためのトルクを伝達することができる伝達トルク容量よりも小さい場合に、前記エンジンを停止するとともに前記モータの出力トルクを前記駆動輪に伝達して走行する第2走行モードを選択する第1選択手段と、前記第1選択手段により前記第1走行モードが選択されたときに、前記エンジンの出力トルクを前記推定手段により推定された伝達トルク容量よりも小さいトルクに制御する制御手段とを備えていることを特徴とするものである。
請求項2の発明は、請求項1の発明において、前記判断手段により前記フェールが生じていると判断された後に前記ハイブリッド車両が停車した際に、前記係合装置を係合させる操作を再度実行するように構成されていることを特徴とするハイブリッド車両の制御装置である。
請求項3の発明は、請求項1または2の発明において、前記判断手段により前記フェールが生じていると判断された際に前記推定手段により推定された前記係合装置の伝達トルク容量が、前記エンジンをクランキングさせるためのトルクを伝達することができる伝達トルク容量以上の場合に、前記モータに電力を供給する蓄電装置の充電残量が予め定められた第1閾値よりも少ないときに、前記第1走行モードを選択し、前記蓄電装置の充電残量が前記第1閾値よりも多いときに、前記第2走行モードを選択する第2選択手段を更に備えていることを特徴とするハイブリッド車両の制御装置である。
請求項4の発明は、請求項3の発明において、前記第1閾値は、前記判断手段により前記フェールが生じていると判断されていない場合における前記蓄電装置の充電残量の下限値を定める第2閾値よりも高い値に定められていることを特徴とするハイブリッド車両の制御装置である。
請求項5の発明は、請求項1ないし4のいずれかの発明において、前記エンジンにトルク伝達可能に連結された第1回転要素と、前記駆動輪にトルク伝達可能に連結された第2回転要素と、反力を付与する第3回転要素とを有する差動機構と、前記第3回転要素にトルク伝達可能に連結されたジェネレータとを更に備え、前記モータは、前記第1回転要素と前記第2回転要素とのいずれか一方の回転要素にトルク伝達可能に連結されていることを特徴とするハイブリッド車両の制御装置である。
この発明によれば、エンジンとモータとのトルクの伝達およびエンジンと駆動輪とのトルクの伝達を遮断する係合装置の伝達トルク容量を変化させることができないフェールが生じ、かつそのフェールが生じた際に推定された係合装置の伝達トルク容量がエンジンをクランキングさせるためのトルクを伝達することができる伝達トルク容量以上の場合に、エンジンの出力トルクを駆動輪に伝達して走行する第1走行モードが選択され、第1走行モードが選択されてエンジンからトルクを出力する際に、そのエンジンの出力トルクが、推定された係合装置の伝達トルク容量よりも小さくなるように制御される。そのため、係合装置の伝達トルク容量が比較的小さい場合であっても、エンジンの出力トルクを駆動輪に伝達して走行することができるので、モータに電力を供給する蓄電装置の充電残量が低下することを抑制することができる。その結果、フェールが生じている状態での走行距離を長くすることができる。また、エンジンの出力トルクを駆動輪に伝達することにより、モータの出力トルクのみを駆動輪に伝達する場合よりも、駆動力や制動力を高くすることができ、その結果、フェールが生じている状態で駆動輪に作用させることができる駆動力や制動力の低下を抑制することができる。
係合装置の伝達トルク容量を変化させることができないフェールが生じていると判断された後にハイブリッド車両が停車した際に、再度係合装置を係合させる操作を実行するように構成されている場合には、上述したようなフェールが生じている場合であっても、再度係合装置を係合させる操作を実行することにより、係合装置の伝達トルク容量が高くなる可能性がある。したがって、上記のように再度係合装置を係合させる操作を実行して、エンジンをクランキングさせるトルクを伝達することができる伝達トルク容量まで係合装置の伝達トルク容量が高くなれば、エンジンの出力トルクを駆動輪に伝達して走行させることができるので、モータに電力を供給する蓄電装置の充電残量が低下することを抑制することができる。そのため、フェールが生じている状態での走行距離を長くすることができる。また、そのような係合操作を停車時に行うことにより、係合装置の伝達トルク容量が急激に増大することに起因してショックや異音が生じることを抑制することができる。
係合装置の伝達トルク容量を変化させることができないフェールが生じた際における伝達トルク容量が、エンジンをクランキングさせるためのトルクを伝達することができる伝達トルク容量以上の場合に、モータに電力を供給する蓄電装置の充電残量が予め定められた第1閾値よりも少ないときに、エンジンから駆動輪にトルクを伝達して走行させ、蓄電装置の充電残量が第1閾値よりも多いときに、モータから駆動輪にトルクを伝達して走行させることにより、蓄電装置の充電残量が過不足することを抑制することができる。その結果、フェールが生じている状態での走行距離を長くすることができる。
また、係合装置の伝達トルク容量を変化させることができる場合における蓄電装置の充電残量の下限値を定める第2閾値よりも、第1閾値を高い値に定めることにより、蓄電装置の充電残量が低下してモータから出力することができるトルクが過剰に低下することを抑制することができる。その結果、フェールが生じている状態で駆動輪に作用させることができる駆動力や制動力の低下を抑制することができる。
エンジンにトルク伝達可能に連結された第1回転要素と、駆動輪にトルク伝達可能に連結された第2回転要素と、ジェネレータに連結された第3回転要素とを有する差動機構を備えている場合には、停車した状態を維持したままエンジンのトルクをジェネレータに伝達して発電させることができるので、蓄電装置の充電残量を増大させることができる。その結果、フェールが生じている際における走行距離を長くすることができる。
この発明で対象とする車両は、駆動輪に伝達するトルクを発生させるエンジンおよびモータと、解放することによりエンジンとモータとのトルクの伝達を遮断するとともに、エンジンと駆動輪とのトルクの伝達を遮断する係合装置とを備えたものである。そのように構成された車両の一例を図4に模式的に示している。図4に示す車両は、エンジン(ENG)1と二つのモータ・ジェネレータ(MG1,MG2)2,3とを動力源として備えたハイブリッド車両である。この車両は、エンジン1による走行およびエンジン1とモータ2(3)とによる走行に加えて、モータ3のみを使用した走行やモータ2(3)でエネルギ回生を行う走行などを行うことができ、さらにまたモータ3での走行中にエンジン1を停止させ、またエンジン1を再始動するなどの駆動形態を採ることができるように構成されている。モータ3を駆動力源として走行するいわゆるEV走行では、エンジン1およびモータ2を連れ回すことによる動力損失を抑制することが好ましい。このような要請により、駆動輪4に対して動力を伝達する動力伝達系統からエンジン1を切り離すクラッチK0 が設けられている。
その図4に示す車両は、エンジン1が出力した動力の一部を機械的手段によって駆動輪4に伝達する一方、エンジン1が出力した動力の他の一部を電力に一旦変換した後、機械的な動力に逆変換して駆動輪4に伝達するように構成されている。エンジン1が出力した動力をこのように分割するための動力分割機構5が設けられている。この動力分割機構5は、従来知られているツーモータタイプのハイブリッド駆動装置における動力分割機構と同様の構成であって、図4に示す例では、3つの回転要素によって差動作用を生じさせる差動機構によって構成され、例えばシングルピニオン型の遊星歯車機構によって構成されている。シングルピニオン型遊星歯車機構は、サンギヤ6と、そのサンギヤ6に対して同心円上に配置されたリングギヤ7と、これらサンギヤ6およびリングギヤ7に噛み合っているピニオンギヤ8を自転および公転できるように保持しているキャリヤ9とによって構成されている。なお、動力分割機構5がこの発明における差動機構に相当し、キャリヤ9がこの発明における第1回転要素に相当し、リングギヤ7がこの発明における第2回転要素に相当し、サンギヤ6がこの発明における第3回転要素に相当する。
このキャリヤ9が入力要素となっていて、入力軸10がキャリヤ9に連結されている。また、入力軸10とエンジン1の出力軸(クランクシャフト)11との間にクラッチK0 が設けられている。このクラッチK0 は、従来知られている乾式の摩擦クラッチや湿式の摩擦クラッチなどと同様に構成することができ、エンジン1を動力分割機構5などの動力伝達系統12に対して連結し、あるいは動力伝達系統12から切り離すためのものである。したがって、図4に示すクラッチK0 は、伝達トルク容量が完全解放状態である「0」の状態からスリップのない完全係合状態までの間で連続的に変化させるために摩擦力によりトルクを伝達するように構成されている。このクラッチK0 がこの発明における係合装置に相当する。なお、この発明における係合装置は、伝達トルク容量を変化させることができればよく、したがって、油圧アクチュエータや電磁アクチュエータにより伝達トルク容量を制御される係合装置であってもよく、他の手段により伝達トルク容量を制御するように構成された係合装置であってもよい。
そして、クラッチK0 を介して動力分割機構5に入力されたトルクの反力を、第1モータ2が出力するように構成されている。具体的には、サンギヤ6に第1モータ2が連結され、動力分割機構5に入力されたトルクによって第1モータ2が回転させられるトルクの方向に対抗して第1モータ2のトルクを出力するように構成されている。なお、この第1モータ2は、発電機能のあるモータであって、永久磁石式の同期電動機などによって構成されている。したがって、以下の説明では、第1モータ2を、第1モータ・ジェネレータ2と記す。この第1モータ・ジェネレータ2がこの発明におけるジェネレータに相当する。さらに、リングギヤ7が出力要素となっていて、このリングギヤ7に出力部材である出力ギヤ13が一体化され、この出力ギヤ13から駆動輪4に対して駆動力を出力するように構成されている。なお、出力ギヤ13から駆動輪4に駆動力を伝達するための機構は、デファレンシャルギヤやドライブシャフトを備えており、従来の車両と同様であるからその詳細は省略する。
上記のエンジン1および動力分割機構5ならびに第1モータ・ジェネレータ2は同一軸線上に配列されており、その軸線の延長上に、この発明におけるモータに相当する第2のモータ3が配置されている。この第2モータ3は、走行のための駆動力を発生し、またエネルギ回生を行うためのものであり、上記の第1モータ・ジェネレータ2と同様に永久磁石式の同期電動機などによって構成されている。したがって、第2モータは、発電機能を備えたモータであって、以下の説明では、第2モータ・ジェネレータ3と記す。この第2モータ・ジェネレータ3と前記出力ギヤ13とは、減速機構14を介して連結されている。この減速機構14は、図4に示す例では、シングルピニオン型の遊星歯車機構によって構成されており、サンギヤ15に第2モータ・ジェネレータ3が連結されるとともに、キャリヤ16がハウジングなどの固定部17に連結されて固定されており、さらにリングギヤ18が出力ギヤ13に一体化されている。
上記の各モータ・ジェネレータ2,3は、蓄電装置およびインバータなどを含むコントローラ19に電気的に接続されている。そのコントローラ19を制御するモータ・ジェネレータ用電子制御装置(MG−ECU)20が設けられている。この電子制御装置20はマイクロコンピュータを主体にして構成され、入力されたデータや記憶しているデータあるいは指令信号などに基づいて演算を行い、その演算の結果を制御指令信号としてコントローラ19に出力するように構成されている。そして、各モータ・ジェネレータ2,3は、コントローラ19からの制御信号によりモータあるいは発電機として機能し、またそれぞれの場合のトルクが制御されるように構成されている。
また、前述したエンジン1は、その出力および起動・停止が電気的に制御されるように構成されている。例えばガソリンエンジンであれば、スロットル開度や燃料の供給量、燃料の供給の停止、点火の実行および停止、点火時期などが電気的に制御されるように構成されている。その制御を行うためのエンジン用電子制御装置(E/G−ECU)21が設けられている。このエンジン用電子制御装置21は、マイクロコンピュータを主体にして構成され、入力されたデータや指令信号に基づいて演算を行って、その演算結果を制御信号としてエンジン1に出力し、上記の各種の制御を行うように構成されている。
上記のエンジン1および各モータ・ジェネレータ2,3ならびにクラッチK0 、動力分割機構5などは駆動力源22を構成しており、この駆動力源22を制御するハイブリッド用電子制御装置(HV−ECU)23が設けられている。このハイブリッド用電子制御装置23は、マイクロコンピュータを主体にして構成され、上記のモータ・ジェネレータ用電子制御装置20やエンジン用電子制御装置21に指令信号を出力して、以下に説明する各種の制御を実行するように構成されている。
図4に示す車両は、エンジン1の動力で走行するハイブリッド(HV)モードと、電力で走行する電気車両(EV)モードとを設定することができ、さらにそのEVモードとしては、エンジン1を動力伝達系統12から切り離した切り離しEVモードと、エンジン1を動力伝達系統12に連結した通常EVモードとを設定することができる。これらの各モードを設定する際の前記クラッチK0 の係合および解放の状態を図5にまとめて示してある。すなわち、切り離しEVモードでは、クラッチK0 は解放させられ、これに対して通常EVモードおよびHVモードでは、クラッチK0 は係合させられる。
これらの走行モードは、アクセル開度などの要求駆動力や車速、蓄電装置の充電量(SOC:State Of Charge)などの車両の走行状態に応じて選択される。具体的には、要求駆動力や車速などに応じて、HVモードと通常EVモードあるいは切り離しEVモードとが設定される。すなわち、要求駆動力が比較的大きい場合には、主にエンジン1から駆動力を出力するようにHVモードが設定され、要求駆動力が比較的小さい場合には、エンジン1から駆動力を出力せずに、第2モータ・ジェネレータ3から駆動力を出力する通常EVモードまたは切り離しEVモードが設定される。また、車速が比較的速い場合には、主にエンジン1から駆動力を出力するようにHVモードが設定され、車速が比較的遅い場合には、エンジン1から駆動力を出力せずに、第2モータ・ジェネレータ3から駆動力を出力する通常EVモードまたは切り離しEVモードが設定される。
なお、通常EVモードと切り離しEVモードとは、要求駆動力や車速以外の種々の条件に応じてモードが切り替えられるように構成されている。例えば、自動停止しているエンジン1を再始動する可能性が高い場合などに通常EVモードが設定され、第2モータ・ジェネレータ3のみから駆動力を出力して走行しているときに、第1モータ・ジェネレータ2の連れ回りによる動力損失を抑制する必要がある場合などに切り離しEVモードが設定される。
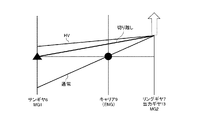
ここで各走行モードにおけるハイブリッド駆動装置の動作状態を簡単に説明すると、図6は、上記の動力分割機構5についての共線図であり、この共線図は、サンギヤ6およびキャリヤ9ならびにリングギヤ7を縦線で示し、それらの間隔を動力分割機構5を構成している遊星歯車機構のギヤ比に対応する間隔とし、さらにそれぞれの縦線の上下方向を回転方向、その上下方向での位置を回転数としたものである。図6で「切り離し」と記載してある線は、切り離しEVモードでの動作状態を示しており、この走行モードでは、第2モータ・ジェネレータ3をモータとして機能させてその動力で走行し、エンジン1はクラッチK0 が解放させられて動力伝達系統12から切り離されて停止しており、また第1モータ・ジェネレータ2も停止している。したがって、サンギヤ6の回転が止まっており、これに対してリングギヤ7が出力ギヤ13と共に正回転して、キャリヤ9はリングギヤ7の回転数に対して遊星歯車機構のギヤ比に応じて減速させられた回転数で正回転する。
また、図6で「通常」と記載してある線は、通常EVモードでの動作状態を示しており、この走行モードでは、第2モータ・ジェネレータ3の動力で走行し、かつエンジン1は停止させられるから、キャリヤ9が固定されている状態で、リングギヤ7が正回転し、かつサンギヤ6が逆回転する。この場合は、第1モータ・ジェネレータ2を発電機として機能させることもできる。
さらに、図6で「HV」と記載してある線は、HVモードでの走行状態を示しており、クラッチK0 が係合させられた状態でエンジン1が駆動力を出力しているからキャリヤ9にはこれを正回転させる方向にトルクが作用している。この状態で、第1モータ・ジェネレータ2を発電機として機能させることにより、サンギヤ6には逆回転方向のトルクが作用する。その結果、リングギヤ7にはこれを正回転させる方向のトルクが現れる。またこの場合、第1モータ・ジェネレータ2で発電された電力が第2モータ・ジェネレータ3に供給されて第2モータ・ジェネレータ3がモータとして機能し、その駆動力が出力ギヤ13に伝達される。したがって、HVモードでは、エンジン1が出力した動力の一部が動力分割機構5を介して出力ギヤ13に伝達されるとともに、残余の動力が第1モータ・ジェネレータ2によって電力に変換されて第2モータ・ジェネレータ3に伝達された後、第2モータ・ジェネレータ3から機械的な動力に再変換させられて出力ギヤ13に伝達される。なお、いずれの走行モードにおいても、減速時など積極的に駆動力を出力する必要がない場合には、いずれかのモータ・ジェネレータ2,3が発電機として機能させられてエネルギ回生が行われる。また、HVモードにおいては、上記モータ・ジェネレータ2,3に加えてエンジン1のポンピングロスなどによるエンジンブレーキ力を作用させることもできる。さらに、HVモード時に駆動力を出力して走行する際には、上記第1モータ・ジェネレータ2により発電されて第2モータ・ジェネレータ3に供給される電力に加えて、蓄電装置から第2モータ・ジェネレータ3に電力を供給することもできる。
なお、EVモードからHVモードに切り替える際には、クラッチK0 を介してエンジン1にトルクを伝達してエンジン1をクランキングさせるように構成されている。このエンジン1をクランキングさせるためのトルクは、第1モータ・ジェネレータ2および第2モータ・ジェネレータ3のいずれか一方または双方から出力されたトルクであってもよく、車両の走行慣性力などに基づいた駆動輪4から伝達されるトルクであってもよい。
上述したようにEVモードからHVモードに切り替える際には、クラッチK0 を介してエンジン1にトルクを伝達してエンジン1をクランキングさせる。そのため、クラッチK0 の可動部材が摺動することができない場合やクラッチK0 を制御するアクチュエータに異常が生じた場合など、クラッチK0 の伝達トルク容量を変化させることができないフェールが生じた場合には、そのフェールが生じている際のクラッチK0 の伝達トルク容量に応じて走行モードを選択することが好ましい。具体的には、EVモードは、蓄電装置の電力を第2モータ・ジェネレータ3に供給して走行するため、蓄電装置の充電残量に応じて走行することができる距離が短くなる可能性があるので、フェールが生じた際にHVモードを選択することが好ましい。
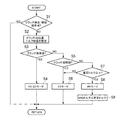
そのため、この発明に係る制御装置は、フェールが生じている際のクラッチK0 の伝達トルク容量が、エンジン1をクランキングさせるためのトルクを伝達することができる伝達トルク容量よりも高い場合には、HVモードを選択することができるように構成されている。その制御の一例を図1に示している。図1に示すフローチャートは、所定時間毎に繰り返し実行されている。図1に示す例では、まず、クラッチK0 を係合させまたは解放させる操作が可能か否かを判断する(ステップS1)。すなわち、クラッチK0 の伝達トルク容量を変化させることができないフェールが生じているか否かを判断する。このステップS1は、従来知られている種々の方法で判断することができ、例えば、出力軸11の回転数と入力軸10の回転数との比または差が、ハイブリッド用電子制御装置23から出力された信号に基づいて算出することができるクラッチK0 の伝達トルク容量に応じた出力軸11の回転数と入力軸10の回転数との比または差よりも予め定められた所定値以上、乖離しているか否かにより判断することができる。
クラッチK0 を係合させまたは解放させる操作が可能であってステップS1で肯定的に判断された場合には、クラッチK0 の伝達トルク容量を適宜変化させることができるので、そのままリターンする。一方、クラッチK0 を係合させまたは解放させる操作が不可能であってステップS1で否定的に判断された場合は、クラッチK0 の伝達トルク容量を推定する(ステップS2)。このステップS2は、クラッチK0 が乾式のクラッチであれば係合および解放させる際に可動する部材のストローク量を検出して、その検出されたストローク量に基づいて伝達トルク容量を推定し、湿式のクラッチであればクラッチK0 の伝達トルク容量を制御するアクチュエータに向けて出力された油圧や電力などの制御量を検出して、その検出された制御量に基づいて伝達トルク容量を推定することができる。以下の説明では、ステップS2で推定されたクラッチK0 の伝達トルク容量を、推定トルクと記す。
ついで、クラッチK0 が滑りなくトルクを伝達することができる完係合状態であるか否かを判断する(ステップS3)。このステップS3は、通常の制御時におけるクラッチK0 の伝達トルク容量の最大値と、推定トルクとがほぼ同一であるか否かにより判断することができ、またはクラッチK0 の伝達トルク容量を変化させる際に可動する部材のストローク量やアクチュエータに向けて出力された油圧などの制御量に基づいて判断することができる。
クラッチK0 が完係合状態でありステップS3で肯定的に判断された場合には、クラッチK0 を介してエンジン1にトルクを伝達することによりエンジン1をクランキングさせることができる。したがって、ステップS3で肯定的に判断された場合には、HVモードおよび通常EVモードを適宜切り替えることができるので、HVモードまたは通常EVモードを選択して(ステップS4)、リターンする。なお、HVモードおよび通常EVモードは、要求駆動力または要求制動力あるいは蓄電装置の充電残量などに応じて切り替える。
一方、クラッチK0 が完係合状態でなくステップS3で否定的に判断された場合には、クラッチK0 の伝達トルク容量が「0」である完解放状態であるか否かを判断する(ステップS5)。このステップS5は、推定トルクに基づいて判断することができ、または、クラッチK0 の伝達トルク容量を変化させる際に可動する部材のストローク量やアクチュエータに向けて出力された油圧などの制御量に基づいて判断することができる。クラッチK0 が完解放状態であり、ステップS5で肯定的に判断された場合には、クラッチK0 を介してエンジン1の出力トルクを駆動輪4に伝達することができないので、EVモードを選択し(ステップS6)、リターンする。なお、上記のようにクラッチK0 が完解放状態であるので、ここでは切り離しEVモードとなる。
それとは反対に、クラッチK0 が完解放状態でなく、ステップS5で否定的に判断された場合、すなわち、推定トルクが、「0」よりも大きくかつ最大値よりも小さい場合には、エンジン1をクランキングさせるためのトルクを伝達することができるか否かを判断する(ステップS7)。すなわち、推定トルクが、クラッチK0 に滑りが生じることなく、エンジン1をクランキングさせるためのトルクを伝達することができる伝達トルク容量(以下、第1閾値αと記す。)以上か否かを判断する。したがって、第1閾値αは、エンジン1の特性などに応じて予め定められた値である。
推定トルクが第1閾値αよりも小さく、ステップS7で否定的に判断された場合には、エンジン1を始動させることができないので、EVモードを選択して(ステップS6)、リターンする。ステップS7で否定的に判断されてEVモードを選択する場合には、クラッチK0 が少なからずトルクを伝達する。そのため、EVモードが選択されて第2モータ・ジェネレータ3からトルクを出力する際には、エンジン1のフリクショントルクなどが作用する。したがって、要求される駆動力を出力して走行する場合には、第2モータ・ジェネレータ3の出力トルクは、エンジン1のフリクショントルクなどが作用して駆動力が低下することを抑制するために、上記フリクショントルクなどの分、大きいトルクを出力することが好ましい。
一方、推定トルクが第1閾値αよりも大きく、ステップS7で肯定的に判断された場合は、エンジン1をクランキングさせて始動させることができるので、HVモードを選択する(ステップS8)。通常、静摩擦係数の方が、動摩擦係数よりも大きいので、クラッチK0 に滑りが生じないときの方が、滑りが生じているときよりも大きなトルクを伝達することができる。そのため、ステップS8によりHVモードを選択されたときには、エンジン1の出力トルクを推定トルク以下に制御して(ステップS9)、リターンする。
なお、上述したようにステップS3およびステップS4は、推定トルク以外のパラメータによっても判断することができるので、クラッチK0 の伝達トルク容量を推定するステップS2は、推定トルクが第1閾値以上か否かを判断するステップS7以前に設けられていればよい。また、上記のようなフェールが生じていない場合にも、常時、クラッチK0 の伝達トルク容量を推定している場合には、図1に示すフローチャート上にクラッチK0 の伝達トルク容量を推定するステップを設けていなくてもよい。
上述したように制御することにより、クラッチK0 の推定トルクが、「0」よりも高くかつ最大値よりも小さい場合であっても、エンジン1をクランキングさせるためのトルクを伝達することができれば、HVモードが選択される。そのため、蓄電装置の電力が低下することを抑制することができる。その結果、クラッチK0 の伝達トルク容量を変化させることができないフェールが生じている状態での走行距離を長くすることができる。すなわち、リンプホーム走行することができる距離を長くすることができる。また、HVモードにより走行させるので、エンジン1の出力トルクと各モータ・ジェネレータ2,3の出力トルクとを駆動輪4に伝達することができる。そのため、駆動力を増大させること、言い換えると、要求される駆動力を出力することができる。さらに、エンジン1のポンピングロスなどによるエンジンブレーキを駆動輪4に作用させることができるので、制動力を増大させることができる。
上述したようにHVモードを選択することにより、クラッチK0 の伝達トルク容量を変化させることができないフェールが生じている状態での走行距離を長くすることができる。したがって、この発明に係る制御装置は、上述したようなフェールが生じている際に、再度、クラッチK0 を係合させる操作を実行するように構成されている。一方、クラッチK0 を再度係合させる操作を実行した際に、クラッチK0 が急激に係合すると、エンジン1を回転させることによる動力損失が増大して急激に制動力が増大し、またはエンジン1の出力トルクが伝達されて急激に駆動力が増大する可能性がある。そのように駆動力や制動力が急激に変化すると、ショックや異音が生じる可能性がある。そのため、この発明に係る制御装置は、クラッチK0 を再度係合させる操作は、停車時に行うように構成されている。その制御の一例を図2に示している。なお、図1と同じステップには、同じ参照符号を付してその説明を省略する。
図2に示す制御例では、クラッチK0 の伝達トルク容量を変化させることができないフェールが生じていてステップS1で否定的に判断された後に、車両が停車しているか否かを判断する(ステップS21)。車両が走行しており、ステップS21で否定的に判断された場合には、ステップS2に移行して、図1と同様の制御を実行する。それとは反対に、車両が停車しておりステップS21で肯定的に判断された場合には、クラッチK0 を係合させる操作を実行する(ステップS22)。このクラッチK0 を係合させる操作は、例えば、クラッチK0 を係合させるためにアクチュエータに向けて出力される制御量を最大値まで増大させ、または、アクチュエータから出力される制御量を、一旦低下させて、再度、その制御量を増大させる。
このようにクラッチK0 の伝達トルク容量を変化させることができないフェールが生じた後に、再度、クラッチK0 を係合させる操作を実行することにより、クラッチK0 の伝達トルク容量を増大させることができる可能性が高くなる。そのような制御を行った結果、クラッチK0 の伝達トルク容量が増大すれば、推定トルクが第1閾値αよりも大きくなって、HVモードを設定することができる。そのため、蓄電装置の電力が低下することを抑制することができ、クラッチK0 の伝達トルク容量を変化させることができないフェールが生じている状態での走行距離を長くすることができる。さらに、車両が停車しているときに、クラッチK0 を係合させる操作を実行することにより、クラッチK0 の伝達トルク容量が急激に増大して駆動力や制動力が急激に変化することを抑制することができる。その結果、ショックや異音が生じることを抑制することができる。
また、クラッチK0 が完係合状態のとき、または推定トルクがエンジン1をクランキングさせるためのトルクを伝達することができる伝達トルク容量以上のときには、EVモードを選択して走行した後に、エンジン1を始動させてHVモードに切り替えることができる。すなわち、EVモードとHVモードとを適宜切り替えることができる。そのため、例えば、下り坂などを走行しているときに各モータ・ジェネレータ2,3により発電し蓄電装置の充電残量を増加させ、加速時など駆動力を出力するときHVモードを設定して走行することができる。また、蓄電装置は、充電残量が過剰に低下すると出力することができる電圧が低下する可能性があり、一方、充電残量が過剰に増加すると耐久性が低下する可能性がある。したがって、蓄電装置の充電残量が、所定の範囲内となるように制御することが好ましい。すなわち、蓄電装置の充電残量が、所定値以上の場合には、EVモードを選択して蓄電装置の電力を消費させて走行し、所定値以下の場合には、HVモードを選択して蓄電装置の電力が消費されることを抑制して走行することが好ましい。
そのため、この発明に係る制御装置は、蓄電装置の充電残量に応じて走行モードを切り替えるように構成されている。その制御の一例を図3に示している。なお、図1と同じステップには、同じ参照符号を付してその説明を省略する。図3に示す例では、クラッチK0 が完係合状態であってステップS3で肯定的に判断された後に、蓄電装置の充電残量が第2閾値β未満か否かを判断する(ステップS31)。この第2閾値βは、蓄電装置の充電残量が過剰に低下することを抑制するために定められた値であり、固定値であってもよく、温度などの環境状態に応じて変化する値であってもよい。また、上述したようにクラッチK0 の伝達トルク容量を変化させることができないフェールが生じている際に、リンプホーム走行させるように構成されているので、蓄電装置の充電残量が低下して出力される電圧が低下することを、そのようなフェールが生じていない場合よりも確実に抑制することが好ましい。したがって、第2閾値βは、上記のようなフェールが生じていないときに定められる蓄電装置の充電残量の下限値よりも高い値に定めることが好ましい。
蓄電装置の充電残量が第2閾値β未満であってステップS31で肯定的に判断された場合には、HVモードを設定する(ステップS32)。それとは反対に蓄電装置の充電残量が第2閾値以上であってステップS31で否定的に判断された場合には、EVモードを選択する(ステップS6)。
また、推定トルクが、エンジン1をクランキングさせるトルクを伝達することができる伝達トルク容量以上であってステップS7で肯定的に判断された場合も、上述したようにクラッチK0 が完係合状態であるときと同様に、EVモードとHVモードとを切り替えることができる。そのため、図3に示す例では、ステップS7で肯定的に判断された後に、上記ステップS31と同様に蓄電装置の充電残量が第2閾値β未満か否かを判断し(ステップS33)、蓄電装置の充電残量が第2閾値β未満であってステップS33で肯定的に判断された場合には、HVモードを選択する(ステップS8)。それとは反対に蓄電装置の充電残量が第2閾値β以上であってステップS33で否定的に判断された場合には、EVモードを選択する(ステップS6)。
上述したようにクラッチK0 の伝達トルク容量がエンジン1をクランキングさせるためのトルクを伝達することができる伝達トルク容量以上のときに、蓄電装置の充電残量に応じてEVモードとHVモードとを切り替えることにより、蓄電装置の充電残量が過不足することを抑制することができる。その結果、上述したようなフェールが生じている状態での走行距離を長くすることができる。また、その第2閾値βを、上記のようなフェールが生じていないときに定められる蓄電装置の充電残量の下限値よりも高い値に定めることにより、蓄電装置から出力される電圧が過剰に低下すること、すなわち各モータ・ジェネレータ2,3の出力トルクが過剰に低下することを抑制することができる。その結果、上記のようなフェールが生じている際における駆動力や制動力の低下を抑制することができる。
なお、この発明で対象とする車両は、図4に示す構成に限定されず、図7ないし図11に示すように構成されたものであってもよい。以下、図7ないし図11に示す車両の構成を簡単に説明する。なお、図4と同様の構成には、同一の参照符号を付してその説明を省略する。
図7に示す例では、第1モータ・ジェネレータ2が、入力軸10の延長線上に配置されている。また、上記の動力分割機構5や第1モータ・ジェネレータ2などの回転中心軸線と平行にカウンタシャフト24が配置されており、上記の出力ギヤ13に噛み合っているカウンタドリブンギヤ25がこのカウンタシャフト24と一体に回転するように取り付けられている。
さらに、上記の動力分割機構5からドライブシャフト26に伝達されるトルクに、第2モータ・ジェネレータ3のトルクを負荷するように構成されている。すなわち、上記のカウンタシャフト24と平行に第2モータ・ジェネレータ3が配置されており、そのロータに連結されたリダクションギヤ27が上記のカウンタドリブンギヤ25に噛み合っている。そのリダクションギヤ27はカウンタドリブンギヤ25より小径であり、したがって第2モータ・ジェネレータ3のトルクを増幅してカウンタドリブンギヤ25もしくはカウンタシャフト24に伝達するように構成されている。
カウンタシャフト24には、更に、カウンタドライブギヤ28が一体に回転するように設けられており、このカウンタドライブギヤ28が終減速機であるデファレンシャルギヤ29におけるリングギヤ30に噛み合っている。
また、この発明における係合装置は、解放することによりエンジンとモータとのトルクの伝達を遮断するとともに、エンジンと駆動輪とのトルクの伝達を遮断するものであり、図7に示すようにエンジン1と動力分割機構5とのトルクの伝達、より具体的には、入力軸10と出力軸11とのトルクの伝達を遮断するものに限られない。すなわち、動力分割機構5は、いずれか一つの回転要素のトルクの伝達を遮断することにより、いわゆるニュートラル状態となるので、図8に示すように第1モータ・ジェネレータ2とサンギヤ6との間にクラッチK0 を設けてもよく、図9に示すようにリングギヤ7と出力ギヤ13との間にクラッチK0 を設けてもよい。
また、上述した例では、第2モータ・ジェネレータ3が、動力分割機構5の出力側にトルクを伝達するように設けられているが、図10に示すように動力分割機構5の入力軸10にトルクを伝達するように構成されていてもよい。
上述した図4および図7ないし図10に示すように差動機構を備えた車両は、クラッチK0 の出力側の部材と駆動輪4とが機械的に連結されて構成されていても、クラッチK0 がエンジン1の出力トルクを伝達することができる状態であれば、停車させたままエンジン1のトルクを第1モータ・ジェネレータ2に伝達して発電させることができる。そのため、上述したようなフェールが生じている状態で車両が停車している間に、蓄電装置の充電残量を増大させることができるので、上記のようなフェールが生じている状態での走行距離を長くすることができる。
さらに、上記の動力分割機構5のような差動機構を備えていなくてもよい。具体的には、図11に示すようにエンジン1の出力軸11にクラッチK0 を介してモータ31が連結され、そのモータの出力軸32に変速機構(T/M)33が連結された構成であってもよい。
1…エンジン(ENG)、 2,3…モータ・ジェネレータ、 4…駆動輪、 5…動力分割機構、 6,15…サンギヤ、 7,18…リングギヤ、 9,16…キャリヤ、 19…コントローラ、 20…モータ・ジェネレータ用電子制御装置(MG−ECU)、 21…エンジン用電子制御装置(E/G−ECU)、 23…ハイブリッド用電子制御装置(HV−ECU)、 K0 …クラッチ。
Claims (5)
- 駆動輪に伝達するためのトルクを発生させるエンジンおよびモータと、解放することにより前記エンジンと前記モータとのトルクの伝達を遮断するとともに、前記エンジンと前記駆動輪とのトルクの伝達を遮断する係合装置とを備え、前記係合装置を介して前記エンジンにトルクを伝達することにより前記エンジンをクランキングさせるように構成されたハイブリッド車両の制御装置において、
前記係合装置の伝達トルク容量を変化させることができないフェールが生じていることを判断する判断手段と、
前記係合装置の伝達トルク容量を推定する推定手段と、
前記判断手段により前記フェールが生じていると判断された際に前記推定手段により推定された前記係合装置の伝達トルク容量が、前記エンジンをクランキングさせるためのトルクを伝達することができる伝達トルク容量以上の場合に、前記エンジンの出力トルクを前記駆動輪に伝達して走行する第1走行モードを選択し、前記判断手段により前記フェールが生じていると判断され、かつ前記推定手段により推定された前記係合装置の伝達トルク容量が、前記エンジンをクランキングさせるためのトルクを伝達することができる伝達トルク容量よりも小さい場合に、前記エンジンを停止するとともに前記モータの出力トルクを前記駆動輪に伝達して走行する第2走行モードを選択する第1選択手段と、
前記第1選択手段により前記第1走行モードが選択されたときに、前記エンジンの出力トルクを前記推定手段により推定された伝達トルク容量よりも小さいトルクに制御する制御手段と
を備えていることを特徴とするハイブリッド車両の制御装置。 - 前記判断手段により前記フェールが生じていると判断された後に前記ハイブリッド車両が停車した際に、前記係合装置を係合させる操作を再度実行するように構成されていることを特徴とする請求項1に記載のハイブリッド車両の制御装置。
- 前記判断手段により前記フェールが生じていると判断された際に前記推定手段により推定された前記係合装置の伝達トルク容量が、前記エンジンをクランキングさせるためのトルクを伝達することができる伝達トルク容量以上の場合に、前記モータに電力を供給する蓄電装置の充電残量が予め定められた第1閾値よりも少ないときに、前記第1走行モードを選択し、前記蓄電装置の充電残量が前記第1閾値よりも多いときに、前記第2走行モードを選択する第2選択手段を更に備えていることを特徴とする請求項1または2に記載のハイブリッド車両の制御装置。
- 前記第1閾値は、前記判断手段により前記フェールが生じていると判断されていない場合における前記蓄電装置の充電残量の下限値を定める第2閾値よりも高い値に定められていることを特徴とする請求項3に記載のハイブリッド車両の制御装置。
- 前記エンジンにトルク伝達可能に連結された第1回転要素と、前記駆動輪にトルク伝達可能に連結された第2回転要素と、反力を付与する第3回転要素とを有する差動機構と、
前記第3回転要素にトルク伝達可能に連結されたジェネレータと
を更に備え、
前記モータは、前記第1回転要素と前記第2回転要素とのいずれか一方の回転要素にトルク伝達可能に連結されている
ことを特徴とする請求項1ないし4のいずれかに記載のハイブリッド車両の制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014084386A JP6156243B2 (ja) | 2014-04-16 | 2014-04-16 | ハイブリッド車両の制御装置 |
| PCT/JP2015/058651 WO2015159649A1 (en) | 2014-04-16 | 2015-03-17 | Control system for hybrid vehicle |
| US15/301,982 US9956954B2 (en) | 2014-04-16 | 2015-03-17 | Control system for hybrid vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014084386A JP6156243B2 (ja) | 2014-04-16 | 2014-04-16 | ハイブリッド車両の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015202830A JP2015202830A (ja) | 2015-11-16 |
| JP6156243B2 true JP6156243B2 (ja) | 2017-07-05 |
Family
ID=52808095
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014084386A Expired - Fee Related JP6156243B2 (ja) | 2014-04-16 | 2014-04-16 | ハイブリッド車両の制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9956954B2 (ja) |
| JP (1) | JP6156243B2 (ja) |
| WO (1) | WO2015159649A1 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6327238B2 (ja) * | 2015-12-11 | 2018-05-23 | トヨタ自動車株式会社 | ハイブリッド車両の駆動制御装置 |
| JP6296073B2 (ja) * | 2016-02-01 | 2018-03-20 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| FR3048047B1 (fr) * | 2016-02-19 | 2018-03-09 | Renault S.A.S | Procede de controle du decrabotage d'un baladeur |
| JP6589757B2 (ja) * | 2016-06-29 | 2019-10-16 | トヨタ自動車株式会社 | ハイブリッド車両の走行モード切換制御装置 |
| JP6588406B2 (ja) * | 2016-08-12 | 2019-10-09 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| US9919702B1 (en) | 2017-01-27 | 2018-03-20 | GM Global Technology Operations LLC | Systems and methods for managing battery state of charge |
| US10876617B2 (en) * | 2017-03-10 | 2020-12-29 | Ford Global Technologies, Llc | Methods and system for operating a driveline |
| KR102281654B1 (ko) * | 2017-06-08 | 2021-07-29 | 현대자동차주식회사 | 하이브리드 자동차 및 그를 위한 제어방법 |
| KR102278348B1 (ko) * | 2017-06-29 | 2021-07-19 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
| WO2020153429A1 (ja) * | 2019-01-23 | 2020-07-30 | アイシン・エィ・ダブリュ株式会社 | 車両用駆動装置及びハイブリッド車両 |
| US11338794B2 (en) * | 2019-04-22 | 2022-05-24 | Ford Global Technologies, Llc | Hybrid vehicle launching methods and system |
| US11358586B2 (en) * | 2019-04-22 | 2022-06-14 | Ford Global Technologies, Llc | Methods and system for launching a hybrid vehicle |
| GB2594273B (en) | 2020-04-21 | 2022-10-05 | Jaguar Land Rover Ltd | Apparatus and method for controlling an electric machine |
| US11597374B2 (en) * | 2020-09-10 | 2023-03-07 | Ford Global Technologies, Llc | Methods and system for arbitrating fuel cut out for a hybrid vehicle |
| US11772627B2 (en) * | 2021-12-09 | 2023-10-03 | Ford Global Technologies, Llc | Methods and system to prepare a disconnect clutch for starting an engine |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3173319B2 (ja) | 1995-04-28 | 2001-06-04 | 株式会社エクォス・リサーチ | ハイブリッド型車両 |
| JP3172490B2 (ja) * | 1998-05-18 | 2001-06-04 | 株式会社日立製作所 | ハイブリッド車 |
| JP3654074B2 (ja) * | 1999-08-27 | 2005-06-02 | トヨタ自動車株式会社 | 複数の原動機を備えた車両の制御装置 |
| JP2002051407A (ja) * | 2000-08-03 | 2002-02-15 | Toyota Motor Corp | パワートレーンの制御装置 |
| JP2009274566A (ja) * | 2008-05-14 | 2009-11-26 | Honda Motor Co Ltd | 車両制御装置 |
| JP2010188776A (ja) | 2009-02-16 | 2010-09-02 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP4860741B2 (ja) * | 2009-09-30 | 2012-01-25 | ジヤトコ株式会社 | 電動駆動ユニット |
| JP2011230706A (ja) | 2010-04-28 | 2011-11-17 | Toyota Motor Corp | 車両の制御装置 |
| WO2011155015A1 (ja) * | 2010-06-07 | 2011-12-15 | トヨタ自動車株式会社 | ハイブリッド車両およびその制御方法 |
| JP5201191B2 (ja) * | 2010-10-08 | 2013-06-05 | 三菱自動車工業株式会社 | ハイブリット車のクラッチ制御装置 |
| JP2012254739A (ja) * | 2011-06-09 | 2012-12-27 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
| JP5885407B2 (ja) | 2011-06-14 | 2016-03-15 | アイシン・エーアイ株式会社 | 車両の動力伝達制御装置 |
| JP5857532B2 (ja) * | 2011-08-24 | 2016-02-10 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| GB2508669A (en) * | 2012-12-10 | 2014-06-11 | Jaguar Land Rover Ltd | A speed control system for a hybrid electric vehicle |
| JP6070831B2 (ja) * | 2013-04-26 | 2017-02-01 | 日産自動車株式会社 | ハイブリッド車両のクラッチ制御装置 |
| US9242641B2 (en) * | 2013-09-04 | 2016-01-26 | Ford Global Technologies, Llc | Dynamic allocation of drive torque |
-
2014
- 2014-04-16 JP JP2014084386A patent/JP6156243B2/ja not_active Expired - Fee Related
-
2015
- 2015-03-17 WO PCT/JP2015/058651 patent/WO2015159649A1/en active Application Filing
- 2015-03-17 US US15/301,982 patent/US9956954B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015202830A (ja) | 2015-11-16 |
| US9956954B2 (en) | 2018-05-01 |
| WO2015159649A1 (en) | 2015-10-22 |
| US20170113679A1 (en) | 2017-04-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6156243B2 (ja) | ハイブリッド車両の制御装置 | |
| US9944278B2 (en) | Vehicle | |
| JP5915744B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5679072B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6176011B2 (ja) | 車両の制御装置 | |
| JP6003843B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5991375B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6060850B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5794260B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2016055759A (ja) | ハイブリッド車両の制御装置 | |
| KR101752111B1 (ko) | 하이브리드 차량용 제어 장치 및 제어 방법 | |
| JP5706274B2 (ja) | ハイブリッド車両の制御装置 | |
| US20160325752A1 (en) | Controller for vehicle | |
| JP2015081074A (ja) | 車両の制御装置 | |
| JP2015020590A (ja) | ハイブリッド車両の制御装置 | |
| JP6260173B2 (ja) | 車両の制御装置 | |
| US10005444B2 (en) | Vehicle | |
| JP5659748B2 (ja) | 車両の制御装置 | |
| JP2018118547A (ja) | 車両制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161007 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170509 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170522 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6156243 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |