JP6588836B2 - 光学位置測定装置 - Google Patents
光学位置測定装置 Download PDFInfo
- Publication number
- JP6588836B2 JP6588836B2 JP2016007673A JP2016007673A JP6588836B2 JP 6588836 B2 JP6588836 B2 JP 6588836B2 JP 2016007673 A JP2016007673 A JP 2016007673A JP 2016007673 A JP2016007673 A JP 2016007673A JP 6588836 B2 JP6588836 B2 JP 6588836B2
- Authority
- JP
- Japan
- Prior art keywords
- scale
- scanning
- partial light
- measurement
- scanning unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003287 optical effect Effects 0.000 title claims description 115
- 238000005259 measurement Methods 0.000 claims description 131
- 230000009471 action Effects 0.000 claims description 10
- 230000002452 interceptive effect Effects 0.000 claims description 9
- 238000000034 method Methods 0.000 claims description 4
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 claims description 3
- 239000013598 vector Substances 0.000 description 44
- 230000035945 sensitivity Effects 0.000 description 26
- 230000007935 neutral effect Effects 0.000 description 8
- 230000033001 locomotion Effects 0.000 description 6
- 238000001514 detection method Methods 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 230000010363 phase shift Effects 0.000 description 4
- 230000014509 gene expression Effects 0.000 description 3
- 230000000737 periodic effect Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 230000006798 recombination Effects 0.000 description 2
- 238000005215 recombination Methods 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/14—Measuring arrangements characterised by the use of optical techniques for measuring distance or clearance between spaced objects or spaced apertures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/36—Forming the light into pulses
- G01D5/38—Forming the light into pulses by diffraction gratings
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optical Transform (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
これらの二つの物体の中の一方と連結され、少なくとも一つの第一の目盛方向に沿って目盛領域を周期的に配置した測定目盛を有する基準尺と、
基準尺に対して相対的に動くように配置された、複数の光学素子を備えた走査ユニットと、
を備え、この走査ユニットの光学素子の配置及び構成によって、干渉させる部分光ビームが対称面に関して鏡面対称に進んで、基準尺にV字形状に入射することと基準尺によるV字形状の反射を受けることとの中の一つ以上を実行する走査光路が得られる。この対称面は、基準尺の表面に対して平行な方向を向くとともに、第一の目盛方向に対して直角に延びる回転軸の周りを所定の傾斜角だけ傾斜している。
+1/0次の回折次数
−3/+1次の回折次数
−3/0次の回折次数
この測定目盛は、信号生成に使用される回折次数の回折効率を最適化して高くした反射位相格子として構成することが可能である。
測定目盛に当たって、そこで、V字形状に走査ユニットの方に反射される、二つの異なる回折次数に対応する二つの部分光ビームへの分割が行なわれ、
これらの二つの反射された部分光ビームが、走査ユニットにおいて、二つの第一の走査格子を二つの反射器の方向に通過し、その際、入射方向に対して逆平行の方向を向く偏向作用と第一の目盛方向に対して直角の集束作用だけを受け、
次に、そのように偏向、集束された部分光ビームが、それぞれ反射器に当たって、基準尺の方向に反射され、
次に、これらの二つの反射された部分光ビームが、二つの第二の走査格子を基準尺の方向に通過し、その際、第一の目盛方向への偏向作用と第一の目盛方向に対して直角のコリメーション作用だけを受け、その結果、二つの部分光ビームは、次に、V字形状に基準尺の方向に進み、
そこで、重なり合った部分光ビームの走査ユニットの方向への新たな回折と反射が起こるように、
走査ユニットを構成することができる。
分割素子によって、二つの部分光ビームに分割された後、これらの部分光ビームが、それぞれ偏向素子の方向に進み、
部分光ビームが、偏向素子によって偏向され、その結果、V字形状に測定目盛上の第一の衝突地点の方向に進み、
部分光ビームが、測定目盛上の第一の衝突地点で、それぞれレンズと反射器の方向への第一の回折とV字形状の反射を受け、
部分光ビームが、一回目にレンズを通過し、反射器によってV字形状に入射方向に反射されて、二回目にレンズを通過し、
次に、部分光ビームが、第二の衝突地点で測定目盛に当たって、それぞれ走査ユニット内の偏向素子の方向への第二の回折とV字形状の反射を受けるように、
走査ユニットを構成することができる。
影響を受けずに走査板を通過した後、測定目盛に当たり、そこで、走査ユニットの方にV字形状に反射される、二つの異なる回折次数に対応する二つの部分光ビームへの分割が行なわれ、
これらの二つの反射された部分光ビームが、走査ユニットにおいて、それぞれ二つの走査格子の中の一方を通過し、その際、対称面の方向への偏向作用を受けた後、構造化された光検出器の方向に進み、そこで、重なり合って干渉するように、
走査ユニットを構成することができる。
βA:入射光ビームの入射方向に対する部分光ビームAの偏向角
βB:入射光ビームの入射方向に対する部分光ビームBの偏向角
λ:光の波長
dM:測定目盛の目盛周期
βA’=βB’=βA=βB (式2)
βA’:面外動作時の入射光ビームの入射方向に対する部分光ビームAの偏向角
βB’:面外動作時の入射光ビームの入射方向に対する部分光ビームBの偏向角
βA:面内動作時の入射光ビームの入射方向に対する部分光ビームAの偏向角
βB:面内動作時の入射光ビームの入射方向に対する部分光ビームBの偏向角
この傾斜角αを考慮して、回折次数nA1又はnB1による目盛周期dM’の測定目盛12’での回折に関して、以下の偏向角βA’又はβB’が得られる。

α:傾斜角
nA1:測定目盛での第一の回折時の部分光ビームAの回折次数
nB1:測定目盛での第一の回折時の部分光ビームBの回折次数
λ:光の波長
dM’:面外動作時の測定目盛の目盛周期
βA’:面外動作時の入射光ビームの入射方向に対する部分光ビームAの偏向角
βB’:面外動作時の入射光ビームの入射方向に対する部分光ビームBの偏向角
α:傾斜角
nA1:測定目盛での第一の回折時の部分光ビームAの回折次数
nB1:測定目盛での第一の回折時の部分光ビームBの回折次数
λ:光の波長
dM’:面外動作時の測定目盛の目盛周期
dM:面内動作時の測定目盛の目盛周期
dM’:面外動作時の測定目盛の目盛周期
α:傾斜角
nA1:測定目盛での第一の回折時の部分光ビームAの回折次数
nB1:測定目盛での第一の回折時の部分光ビームBの回折次数
λ:光の波長
dM:面内動作時の測定目盛の目盛周期
SPx’:x方向に沿った基準尺のずれに関して生成される走査信号の信号周期
SPz’:z方向における基準尺のずれに関して生成される走査信号の信号周期
SP:面内動作時での同じ走査光学系の信号周期
α:傾斜角
βA1:面内動作時の測定目盛に入射する部分光ビームAの対称面に対する偏向角
βA2:面内動作時の測定目盛により回折される部分光ビームAの対称面に対する偏向角
λ:光の波長
dM:面内動作時の測定目盛の目盛周期
βA2’=βB2’=βA2=βB2 (式8b)
βA1:面内動作時の測定目盛に入射する部分光ビームAの対称面に対する偏向角
βA2:面内動作時の測定目盛により回折される部分光ビームAの対称面に対する偏向角
βB1:面内動作時の測定目盛に入射する部分光ビームBの対称面に対する偏向角
βB2:面内動作時の測定目盛により回折される部分光ビームBの対称面に対する偏向角
βA1’:面外動作時の測定目盛に入射する部分光ビームAの対称面に対する偏向角
βA2’:面外動作時の測定目盛により回折される部分光ビームAの対称面に対する偏向角
βB1’:面外動作時の測定目盛に入射する部分光ビームBの対称面に対する偏向角
βB2’:面外動作時の測定目盛により回折される部分光ビームBの対称面に対する偏向角
βA1’:面外動作時の測定目盛に入射する部分光ビームAの対称面に対する偏向角
βA2’:面外動作時の測定目盛により回折される部分光ビームAの対称面に対する偏向角
βB1’:面外動作時の測定目盛に入射する部分光ビームBの対称面に対する偏向角
βB2’:面外動作時の測定目盛により回折される部分光ビームBの対称面に対する偏向角
α:傾斜角
nA1:面外動作における測定目盛での第一の回折時の部分光ビームAの回折次数
nB1:面外動作における測定目盛での第一の回折時の部分光ビームBの回折次数
λ:光の波長
dM’:面外動作時の測定目盛の目盛周期
βA1:面内動作時の測定目盛に入射する部分光ビームAの対称面に対する偏向角
α:傾斜角
nA1:面外動作における測定目盛での第一の回折時の部分光ビームAの回折次数
nB1:面外動作における測定目盛での第一の回折時の部分光ビームBの回折次数
λ:光の波長
dM’:面外動作時の測定目盛の目盛周期
βA1:面内動作時の測定目盛に入射する部分光ビームAの対称面に対する偏向角
α:傾斜角
nA1:面外動作における測定目盛での第一の回折時の部分光ビームAの回折次数
nB1:面外動作における測定目盛での第一の回折時の部分光ビームBの回折次数
λ:光の波長
dM’:面外動作時の測定目盛の目盛周期
βA1’:面外動作時の測定目盛に入射する部分光ビームAの対称面SEに対する偏向角
βA2’:面外動作時の測定目盛により回折される部分光ビームAの対称面SEに対する偏向角
α:傾斜角
nA1:面外動作における測定目盛での第一の回折時の部分光ビームAの回折次数
nB1:面外動作における測定目盛での第一の回折時の部分光ビームBの回折次数
λ:光の波長
dM’:面外動作時の測定目盛の目盛周期
Φ1:第一の走査ユニットの位置位相
Φ2:第二の走査ユニットの位置位相
SPx’:x方向に沿った基準尺のずれに関して生成される走査信号の信号周期
SPz’:z方向に沿った基準尺のずれに関して生成される走査信号の信号周期
ΔxM:x方向の基準尺のずれ
ΔzM:z方向の基準尺のずれ
ξx:基準尺に対して相対的な二つの走査ユニットのx方向の位置
ξz:基準尺に対して相対的な二つの走査ユニットのz方向の位置
Φ1:第一の走査ユニットの位置位相
Φ2:第二の走査ユニットの位置位相
SPx’:x方向に沿った基準尺のずれに関して生成される走査信号の信号周期
SPz’:z方向に沿った基準尺のずれに関して生成される走査信号の信号周期
11,11’,111’,211’,311’,411’ 目盛支持体
12,12’,112’,212’,312’,412’ 測定目盛
20,120,220,320.1,320.2,420.1〜420.6 走査ユニット
21,223,323.1,323.2 走査板
22A1,22B1,224A,324.1A,324.1B 第一の走査格子
22A2,22B2,224B,324.2A,324.2B 第二の走査格子
23A,23B 反射器
121,221,321.1,321.2 光源
122,222,322.1,322.2 コリメータレンズ
123 分割素子
124A,124B 偏向素子
125A,125B レンズ
126A,126B 反射器
127.1,127.2,127.3 ビーム分割器
128.1,128.2,128.3,225,325.1,325.2 検出器
A,B 部分光ビーム
dM 目盛周期
PM 第一の衝突地点
PM’ 第二の衝突地点
SE 対称面
SIN 入射光ビーム
SOUT 信号光ビーム
x 第一の方向
y 第二の方向
z 第三の方向
α 傾斜角
βA,βA’,βA1’,βA2’ 部分光ビームAの回折角又は偏向角
βB,βB’,βB1’,βB2’ 部分光ビームBの回折角又は偏向角
Claims (14)
- 互いに相対的に動く二つの物体の位置を検出する光学位置測定装置であって、
これらの二つの物体の中の一方と連結され、少なくとも一つの第一の目盛方向(x)に沿って目盛領域を周期的に配置した測定目盛を備えた基準尺と、
この基準尺に対して相対的に動くように配置された、複数の光学素子を備えた走査ユニットと、
を有し、
この走査ユニットの光学素子の配置及び構成によって、干渉させる部分光ビームが対称面に関して鏡面対称に進んで、基準尺上にV字形状に入射することと基準尺によるV字形状の反射を受けることとの中の一つ以上を実行する走査光路が得られる、
光学位置測定装置において、
この対称面(SE)が、基準尺(10’;110’;210’;310’;410’)の表面に対して平行な方向を向くとともに、第一の目盛方向(x)に対して直角に延びる回転軸の周りを所定の傾斜角(α)だけ傾斜することと、
対称面(SE)が基準尺(10)の表面に対して直角の方向を向いた非傾斜状態において選定された測定目盛(12)の目盛周期(dM)に応じて、走査ユニット(20;120;220;320.1,320.2;420.1〜420.6)内の走査光路がこの非傾斜状態の走査光路と同じになるように、傾斜状態における測定目盛(12’;112’;212’;312’;412’)の目盛周期(dM’)、部分光ビームの回折次数(n A ,n B )及び傾斜角(α)が選定されることと、
を特徴とする光学位置測定装置。 - 測定目盛(12’;112’;212’;312’;412’)での非対称な回折次数から得られる部分光ビーム(A,B)を干渉させることを特徴とする請求項1に記載の光学位置測定装置。
- 測定目盛(12’;112’;212’;312’;412’)での次の回折次数の組合せ、
+3/−1回折次数、
+1/0回折次数、
−3/+1回折次数、
−1/0回折次数、
の中の一つから得られる部分光ビーム(A,B)を干渉させることを特徴とする請求項2に記載の光学位置測定装置。 - 測定目盛(12’;112’;212’;312’;412’)が、信号生成に使用される回折次数の回折効率を最適化して高くした反射位相格子として構成されることを特徴とする請求項2に記載の光学位置測定装置。
- 走査ユニット(20;220;320.1,320.2;420.1〜420.6)が、複数の光学素子を備えた少なくとも一つの走査板(21;223;323.1,323.2)を有し、この走査板(21;223;323.1,323.2)が対称面(SE)に対して直角に配置されることを特徴とする請求項1に記載の光学位置測定装置。
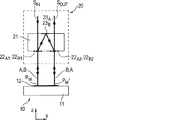
- 走査ユニット(20)に配置された走査板(21)が透明に構成されて、その基準尺(10’)の方を向いた側に、二つの第一の走査格子(22A1,22B1)と二つの第二の走査格子(22A2,22B2)が配置されるとともに、その基準尺と逆の方を向いた側に、二つの反射器(23A,23B)が配置され、これらの反射器(23A,23B)の反射する側が基準尺(10’)の方向を向いていることを特徴とする請求項1から5までのいずれか一つに記載の光学位置測定装置。
- 光源から放出された光ビーム(SIN)が、
測定目盛(12’)に当たり、そこで、走査ユニット(20)の方にV字形状に反射される、二つの異なる回折次数に対応する二つの部分光ビーム(A,B)に分割され、
これらの反射された二つの部分光ビーム(A,B)が、走査ユニット(20)において、二つの反射器(22A,22B)の方向に向かって二つの第一の走査格子(22A1,22B1)を通過し、その際、入射方向に対して逆平行の方向を向く偏向作用と第一の目盛方向(x)に対して直角の集束作用だけを受け、
次に、そのように偏向、集束された部分光ビーム(A,B)が、それぞれ反射器(23A,23B)に当たって、基準尺(10’)の方向に反射され、
次に、これらの二つの部分光ビーム(A,B)が、基準尺(10’)の方向に向かって二つの第二の走査格子(22A2,22B2)を通過し、その際、第一の目盛方向(x)への偏向作用と第一の目盛方向(x)に対して直角のコリメーション作用だけを受け、その結果、これらの二つの部分光ビーム(A,B)が、次に、基準尺(10’)の方向にV字形状に進み、
そこで、重なり合った部分光ビーム(A,B)の走査ユニット(20)の方向への新たな回折と反射が起こるように、
走査ユニット(20)が構成されることを特徴とする請求項6に記載の光学位置測定装置。 - 走査ユニット(120)が、少なくとも一つの分割素子(123)、二つの偏向素子(124A,124B)、二つの反射器(126A,126B)及び二つのレンズ(125A,125B)を有することを特徴とする請求項1から4までのいずれか一つに記載の光学位置測定装置。
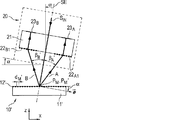
- 光源(121)から放出された光ビームが、
分割素子(123)によって、二つの部分光ビーム(A,B)に分割されて、これらの部分光ビームが、次に、それぞれ偏向素子(124A,124B)の方向に進み、
これらの二つの部分光ビーム(A,B)が、偏向素子(124A,124B)によって偏向され、その結果、測定目盛(112’)上の第一の衝突地点(PM’)の方向に向かってV字形状に進み、
これらの部分光ビーム(A,B)が、測定目盛(112’)上の第一の衝突地点(PM’)で、それぞれ走査ユニット(120)のレンズ(125A,125B)及び反射器(126A,126B)の方向への第一の回折とV字形状の反射を受け、
これらの部分光ビーム(A,B)が、一回目にレンズ(125A,125B)を通過して、反射器(126A,126B)によって、入射方向にV字形状に反射されて、二回目にレンズ(125A,125B)を通過し、
次に、これらの部分光ビームが、第二の衝突地点(PM’)で測定目盛(112’)に当たって、それぞれ走査ユニット(120)の偏向素子(124A,124B)の方向への第二の回折とV字形状の反射を受けるように、
走査ユニット(120)が構成されることを特徴とする請求項8に記載の光学位置測定装置。 - 走査ユニット(220)が、少なくとも一つの透明な走査板(223)と構造化された光検出器(225)を有し、この走査板(223)の入射光ビームの方を向いた側に、第一と第二の走査格子(224A,224B)が配置されることを特徴とする請求項1から5までのいずれか一つに記載の光学位置測定装置。
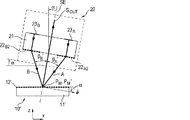
- 光源(221)から放出された光ビームが、
影響を受けること無く走査板(223)を通過した後、測定目盛(212’)に当たり、そこで、走査ユニット(220)の方にV字形状に反射される、二つの異なる回折次数に対応する二つの部分光ビーム(A,B)に分割され、
これらの二つの反射された部分光ビーム(A,B)が、走査ユニット(220)において、それぞれ二つの走査格子(224A,224B)の中の一方を通過し、その際、対称面(SE)の方向に偏向された後、構造化された光検出器(225)の方向に進み、そこで、重なり合って干渉するように、
走査ユニット(220)が構成されることを特徴とする請求項10に記載の光学位置測定装置。 - 同じように構成された第二の走査ユニット(320.2)が、走査ユニット(320.1)と機械的に堅く連結されており、これらの二つの走査ユニット(320.1,320.2)が、それらに対応する互いに平行な方向を向いた回転軸の周りを同じ大きさの角度であるが、互いに逆の方向に傾斜して配置されることを特徴とする請求項10に記載の光学位置測定装置。
- 測定目盛(412’)が第一と第二の目盛方向(x,y)に沿って目盛領域を周期的に配置した二次元交差格子として構成され、請求項12による位置測定装置が三対配備されて、二対が第一の目盛方向(x)に対して平行に配置され、第三の対が第二の目盛方向(y)に対して平行に配置されることを特徴とする測定構成。
- 互いに相対的に動く二つの物体の位置を検出する光学位置測定装置の測定目盛の目盛周期と傾斜角を選定する方法であって、
この光学位置測定装置が、
これらの二つの物体の中の一方と連結され、少なくとも一つの第一の目盛方向(x)に沿って目盛領域を周期的に配置した測定目盛を備えた基準尺と、
この基準尺に対して相対的に動くように配置された、複数の光学素子を備えた走査ユニットと、
を有し、
この走査ユニットの光学素子の配置及び構成によって、干渉させる部分光ビームが対称面に関して鏡面対称に進んで、基準尺上にV字形状に入射することと基準尺によるV字形状の反射を受けることとの中の一つ以上を実行する走査光路が得られ、
この対称面(SE)が、基準尺(10’;110’;210’;310’;410’)の表面に対して平行な方向を向くとともに、第一の目盛方向(x)に対して直角に延びる回転軸の周りを所定の傾斜角(α)だけ傾斜している、
方法において、
対称面(SE)が基準尺(10)の表面に対して直角の方向を向いた非傾斜状態において選定された測定目盛(12)の目盛周期(d M )に応じて、走査ユニット(20;120;220;320.1,320.2;420.1〜420.6)内の走査光路がこの非傾斜状態の走査光路と同じになるように、傾斜状態における測定目盛(12’;112’;212’;312’;412’)の目盛周期(d M ’)、部分光ビームの回折次数(n A ,n B )及び傾斜角(α)が選定される工程、
を有することを特徴とする方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102015203188.8 | 2015-02-23 | ||
| DE102015203188.8A DE102015203188A1 (de) | 2015-02-23 | 2015-02-23 | Optische Positionsmesseinrichtung |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016156805A JP2016156805A (ja) | 2016-09-01 |
| JP2016156805A5 JP2016156805A5 (ja) | 2018-11-01 |
| JP6588836B2 true JP6588836B2 (ja) | 2019-10-09 |
Family
ID=55299395
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016007673A Active JP6588836B2 (ja) | 2015-02-23 | 2016-01-19 | 光学位置測定装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9733069B2 (ja) |
| EP (1) | EP3059554B1 (ja) |
| JP (1) | JP6588836B2 (ja) |
| CN (1) | CN105910533B (ja) |
| DE (1) | DE102015203188A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016210434A1 (de) | 2016-06-13 | 2017-12-14 | Dr. Johannes Heidenhain Gmbh | Optische Positionsmesseinrichtung |
| DE102017201257A1 (de) * | 2017-01-26 | 2018-07-26 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung |
| DE102017219125A1 (de) * | 2017-10-25 | 2019-04-25 | Dr. Johannes Heidenhain Gmbh | Optische Positionsmesseinrichtung |
| DE102020202080A1 (de) * | 2020-02-19 | 2021-08-19 | Dr. Johannes Heidenhain Gesellschaft Mit Beschränkter Haftung | Optische Positionsmesseinrichtung |
| CN115993088A (zh) | 2021-10-20 | 2023-04-21 | 约翰内斯.海德汉博士有限公司 | 光学位置测量设备 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5953209U (ja) * | 1982-10-01 | 1984-04-07 | ソニ−マグネスケ−ル株式会社 | 光学式測長スケ−ル |
| JP4023923B2 (ja) * | 1998-07-02 | 2007-12-19 | ソニーマニュファクチュアリングシステムズ株式会社 | 光学式変位測定装置 |
| KR100531458B1 (ko) * | 1998-08-20 | 2005-11-25 | 소니 매뉴펙츄어링 시스템즈 코포레이션 | 광학식 변위측정장치 |
| WO2002023131A1 (de) * | 2000-09-14 | 2002-03-21 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung |
| JP4722474B2 (ja) * | 2004-12-24 | 2011-07-13 | 株式会社ミツトヨ | 変位検出装置 |
| DE102005043569A1 (de) * | 2005-09-12 | 2007-03-22 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung |
| JP4924884B2 (ja) * | 2006-05-19 | 2012-04-25 | 株式会社ニコン | エンコーダ |
| US7858922B2 (en) * | 2006-11-20 | 2010-12-28 | Dr. Johannes Heidenhain Gmbh | Position-measuring device |
| DE102010029211A1 (de) * | 2010-05-21 | 2011-11-24 | Dr. Johannes Heidenhain Gmbh | Optische Positionsmesseinrichtung |
| JP5618898B2 (ja) * | 2010-08-31 | 2014-11-05 | Dmg森精機株式会社 | 変位検出装置 |
| US9025161B2 (en) * | 2011-11-09 | 2015-05-05 | Zygo Corporation | Double pass interferometric encoder system |
| EP2776790B1 (en) * | 2011-11-09 | 2016-09-14 | Zygo Corporation | Compact encoder head for interferometric encoder system |
| DE102014208988A1 (de) | 2013-09-11 | 2015-03-12 | Dr. Johannes Heidenhain Gmbh | Optische Positionsmesseinrichtung |
-
2015
- 2015-02-23 DE DE102015203188.8A patent/DE102015203188A1/de not_active Withdrawn
-
2016
- 2016-01-19 JP JP2016007673A patent/JP6588836B2/ja active Active
- 2016-02-04 EP EP16154260.0A patent/EP3059554B1/de active Active
- 2016-02-23 US US15/050,620 patent/US9733069B2/en active Active
- 2016-02-23 CN CN201610097949.7A patent/CN105910533B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20160245642A1 (en) | 2016-08-25 |
| EP3059554B1 (de) | 2017-08-30 |
| CN105910533A (zh) | 2016-08-31 |
| JP2016156805A (ja) | 2016-09-01 |
| US9733069B2 (en) | 2017-08-15 |
| DE102015203188A1 (de) | 2016-08-25 |
| EP3059554A1 (de) | 2016-08-24 |
| CN105910533B (zh) | 2019-02-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5079874B2 (ja) | 位置測定装置 | |
| JP6588836B2 (ja) | 光学位置測定装置 | |
| JP5142502B2 (ja) | 位置測定装置 | |
| JP5100266B2 (ja) | エンコーダ | |
| JP4677169B2 (ja) | 位置測定装置 | |
| JP5710105B2 (ja) | 光学式位置測定装置 | |
| US9766098B2 (en) | Optical position measuring instrument | |
| JP6181978B2 (ja) | 干渉式間隔測定装置 | |
| JP5882673B2 (ja) | 光学式位置測定装置 | |
| JP2007010659A (ja) | 位置測定装置 | |
| JP6329456B2 (ja) | 光学式位置測定装置 | |
| KR20140018972A (ko) | 위치 탐지기 및 광 편향 장치 | |
| US8477317B2 (en) | Position measuring arrangement | |
| US8570533B2 (en) | Position measuring device | |
| US9068811B2 (en) | Device for determining distance interferometrically | |
| JP2017223674A (ja) | 光学式エンコーダ | |
| CN109708569B (zh) | 光学位置测量装置 | |
| JP2016156805A5 (ja) | ||
| JP6423589B2 (ja) | 光学的位置測定装置 | |
| JPH0749940B2 (ja) | 測角装置 | |
| JP6427093B2 (ja) | 光学式位置測定装置 | |
| JP6525546B2 (ja) | 位置計測装置 | |
| JP6289609B2 (ja) | 干渉式間隔測定装置 | |
| JP6371120B2 (ja) | 測定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180918 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180918 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20180918 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20181129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190515 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190604 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190821 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190913 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6588836 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |