JP6552383B2 - 自動化されたtem試料調製 - Google Patents
自動化されたtem試料調製 Download PDFInfo
- Publication number
- JP6552383B2 JP6552383B2 JP2015215353A JP2015215353A JP6552383B2 JP 6552383 B2 JP6552383 B2 JP 6552383B2 JP 2015215353 A JP2015215353 A JP 2015215353A JP 2015215353 A JP2015215353 A JP 2015215353A JP 6552383 B2 JP6552383 B2 JP 6552383B2
- Authority
- JP
- Japan
- Prior art keywords
- probe
- sample
- image
- tip
- charged particle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 0 *CC1C*CCC1 Chemical compound *CC1C*CCC1 0.000 description 1
Images










































Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/30—Electron-beam or ion-beam tubes for localised treatment of objects
- H01J37/302—Controlling tubes by external information, e.g. program control
- H01J37/3023—Program control
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/28—Preparing specimens for investigation including physical details of (bio-)chemical methods covered elsewhere, e.g. G01N33/50, C12Q
- G01N1/286—Preparing specimens for investigation including physical details of (bio-)chemical methods covered elsewhere, e.g. G01N33/50, C12Q involving mechanical work, e.g. chopping, disintegrating, compacting, homogenising
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/26—Electron or ion microscopes; Electron or ion diffraction tubes
- H01J37/28—Electron or ion microscopes; Electron or ion diffraction tubes with scanning beams
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/26—Electron or ion microscopes; Electron or ion diffraction tubes
- H01J37/285—Emission microscopes, e.g. field-emission microscopes
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/30—Electron-beam or ion-beam tubes for localised treatment of objects
- H01J37/304—Controlling tubes by information coming from the objects or from the beam, e.g. correction signals
- H01J37/3045—Object or beam position registration
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/30—Electron-beam or ion-beam tubes for localised treatment of objects
- H01J37/31—Electron-beam or ion-beam tubes for localised treatment of objects for cutting or drilling
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/28—Preparing specimens for investigation including physical details of (bio-)chemical methods covered elsewhere, e.g. G01N33/50, C12Q
- G01N1/286—Preparing specimens for investigation including physical details of (bio-)chemical methods covered elsewhere, e.g. G01N33/50, C12Q involving mechanical work, e.g. chopping, disintegrating, compacting, homogenising
- G01N2001/2873—Cutting or cleaving
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/20—Positioning, supporting, modifying or maintaining the physical state of objects being observed or treated
- H01J2237/208—Elements or methods for movement independent of sample stage for influencing or moving or contacting or transferring the sample or parts thereof, e.g. prober needles or transfer needles in FIB/SEM systems
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/30—Electron or ion beam tubes for processing objects
- H01J2237/317—Processing objects on a microscale
- H01J2237/3174—Etching microareas
- H01J2237/31745—Etching microareas for preparing specimen to be viewed in microscopes or analyzed in microanalysers
Landscapes
- Analytical Chemistry (AREA)
- Chemical & Material Sciences (AREA)
- Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Plasma & Fusion (AREA)
- Engineering & Computer Science (AREA)
- Sampling And Sample Adjustment (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
- Drying Of Semiconductors (AREA)
- Testing Or Measuring Of Semiconductors Or The Like (AREA)
Description
図1は、原位置薄片製造プロセスの諸ステップの概要を示す流れ図である。ステップ102で、半導体ウェーハなどの加工物200(図2)をデュアル・ビーム・システムの真空室(図示せず)に挿入する。ステップ104で、加工物の関心領域202を、例えば検査データ、試験データおよび/またはCADデータを使用して識別する。図2は、関心領域202を含む塊204を含む加工物200を示す。この体積204を、イオン・ビーム206によって薄片にする。薄片を抜き取る間および薄片を薄くする間の損傷から関心領域を保護するため、ステップ106で、保護層208を付着させる。ステップ108で、関心領域に隣接した位置に、処理用のイオン・ビーム206の位置合せまたはプローブの位置決めの基準点の役目を果たす1つまたは複数の基準マーク210をミリングする。
任意選択のステップ114で、薄片309に基準マーク306を形成する。図18は、基準マーク306がミリングされた薄片309を示す顕微鏡写真である。いくつかの実施形態では、基準マーク306が、X−Y平面における薄片309とTEMグリッドの位置合せ、および続くZ方向のグリッドの降着を容易にする。基準マークは、FIBを使用してミリングすることによって、またはFIBもしくはSEMを使用して材料を付着させることによって形成することができる。基準マークは単なる基準ターゲットであるため、付着を使用して基準マークを形成することも、または除去を使用して基準マークを形成することもできる。基準マーク306が関心領域の画像化に影響を及ぼさないように、この基準マークは、表面の関心領域から十分に離れた位置に、好ましくはTEMグリッドに溶接する部分に形成する。本明細書で使用するとき、用語「溶接」は、ビーム誘起付着によって材料を付加して取付け部を形成することを指し、冶金の場合のように、表面を溶かし充填材料を追加し、その材料が冷えて、金属を溶接する場合のような結合部を形成することを言うのではない。溶接部は、FIB付着によって、SEM付着によってまたは他のある方法によって形成することができる。この基準マークはさらに、薄化するプロセスの間に、特徴部分(feature)が薄くなるにつれてそれらの特徴部分がどのように変化しているのかを追跡するのを助けるのに役立つことがある。この基準マークは、原位置 STEMを実行しようとする場合、または独立型S/TEMで特定のゲートの位置を特定しようとするときにも役立ちうる。
図4は、図5および16に示されている、プローブ先端を薄片に自動的に取り付ける方法を示す流れ図である。いくつかの実施形態では、最初に、プローブ先端および薄片上の取付け点のx−y平面内における位置を特定し、次いで、プローブ先端を、x−y平面内において、取付け点のx−y座標まで移動させる。次いで、後述するように、表面に対して直角でないビームによって得た画像でプローブ先端および取付け点の位置を特定して、プローブ先端および取付け点のZ座標を決定することができるようにし、プローブ先端をz方向に取付け点まで移動させる。他の実施形態では、異なる経路に沿ってプローブが取付け点まで移動してもよく、異なる変位ベクトルを計算することができる。「物体の位置を決定する」および同様の言い回しは、物体の縁の位置または物体上の点の位置を決定することを含むことが理解される。この物体の縁の位置または物体上の点の位置の決定はしばしば、1つの物体の縁もしくは点を移動させて、別の物体の縁もしくは点の近くに置くこと、または別の物体の縁もしくは点に接触させることを目的とする。
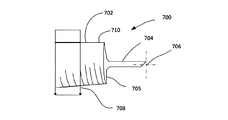
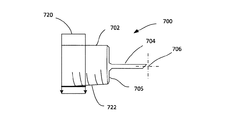
図6は、プローブ先端を自動的に整形する方法を示す流れ図である。図7および8に示されているように、プローブ700の太い部分を針702、細くされた部分を先端704、針が先端に変わる領域を肩705と呼ぶ。針は通常、約10度から約13度の間の角度で次第に細くなる。しかしながら、まっすぐな針を使用することもできる。ステップ602で、プローブを移動させて、プローブ先端が、イオン・ビームの視野の中心706の近くに位置するようにする。ステップ604で、図7に示されているように、針702の画像上にエッジ・ファインダ・ツール708を置き、それを使用して針の上縁710を見つける。ステップ606で、図8に示されているように、この画像上にエッジ・ファインダ・ツールを置き、それを使用して針の下縁を見つける。ステップ604および606は協力して針軸の「Y」位置を決定する。針軸の「Y」位置は、上縁と下縁の間の中央である。
プローブ先端を薄片まで移動させる際の画像減算の使用
画像中の特定のフィーチャの画像認識を容易にするためにいくつかの実施形態で使用される他の技法が画像減算である。当面の作業に無関係の複数の外部フィーチャを画像が有するときには、それらのフィーチャが、物体の位置を自動的に特定しようとする試みを複雑にすることがある。ターゲット物体を移動させた複数の画像を撮影することによって、それらの外部フィーチャを排除することができる。それらの複数の画像の減算を実行し、それにより静止した外部フィーチャを排除することができる。関心の物体の位置を背景の干渉なしに決定するためには、エッジ・ファインダまたは他の自動計測ツール(automated metrology tool)を配置する。
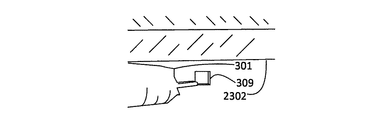
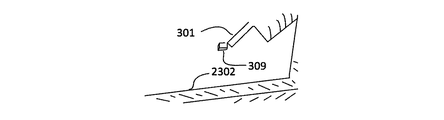
図21は、プローブ301に取り付けられた薄片309をTEMグリッドに取り付けるプロセスを説明する流れ図である。理解されるとおり、TEMグリッドは、TEMで観察するために薄片が装着される構造体であり、本出願の出願人によって市販されている。グリッド上に薄片を正確に降着させるためには、薄片が取り付けられたプローブおよびグリッドの正確な位置が、3つの全ての次元において既知であるべきである。3次元位置特定には、第1のビームに対して傾けられた第2のビームの視点を使用することができる。図22の画像減算ルーチンを使用して、薄片が取り付けられたプローブおよび試料グリッドの位置を、この第2の視点を使用することによって識別することができる。
図30は、本発明のさまざまな実施形態の諸ステップを実行する目的に使用することができる典型的なデュアル荷電粒子ビーム・システムを示す。このシステムは、電子源3000とビーム整形レンズ3001、3003とを備える電子ビーム・カラム3002を有し、電子ビーム3016を導く。このシステムはさらに、イオン源3020とイオン集束レンズ3019、3018とを備えるイオン・ビーム・カラム3021を有し、イオン・ビーム3017を導く。これらのビームは、関心領域307を含む試料3013に向かって導かれる。試料3013は、x−y−z方向に移動し、回転し、傾くことができる5軸1次ステージ3012上に配置される。この1次ステージ上には、TEMグリッド3022を保持するTEMグリッド・ホルダ3024が装着されている。薄片の取付けおよび処理のためにTEMグリッドを操作する更なる自由度を確認するために、任意選択で、TEMグリッド・ホルダ3024を2次ステージ3026上に装着することもできる。このシステムはさらに、粒子検出器3015、ガス導入システム3014および試料操作プローブ3011を含む。試料操作プローブ3011は、プローブ先端をx−y−z方向に移動させることができ、プローブ軸を軸にして回転することができる。荷電粒子ビーム・カラム、検出器、ガス導入システムおよび試料操作プローブは真空室3004内に収容されており、真空室3004は、真空ポンプ3009によって排気される。荷電粒子カラム、検出器、ガス導入システムおよび試料プローブは制御装置3008によって制御され、制御装置3008は、記憶装置3028に記憶されたコンピュータ命令を取り出すことができる。
1つまたは複数の荷電粒子ビーム・システムおよび試料操作プローブを特徴とする真空室内に加工物を装填することと、
加工物上の関心領域を画像化することと、
薄い切片の周囲の材料を、集束イオン・ビームを使用して除去することと、
薄い切片を支持している材料を除去し、小さな取付け構造体によって大きな加工物に取り付けられた薄い切片を残すことと、
イオン・ビームを使用して材料を除去することによって、試料操作プローブの先端を整形することと、
薄い切片に対する先端の位置を決定するために、先端の既知の形状を使用することと、
薄い切片に対する先端の位置を使用して、薄い切片のすぐ近くに試料プローブを自動的に移動させることと、
試料プローブを薄い切片に取り付けることと、
大きな加工物に薄い切片を接続している支持構造体を、イオン・ビームを使用して除去することであって、薄い切片が試料プローブだけによって支持されているようにすることと、
試料プローブを、取り付けられた薄い切片とともに、薄い切片用の試料グリッドが位置する領域まで移動させることと、
試料グリッドおよびプローブならびに取り付けられた薄い切片が位置する領域を画像化することと、
薄い切片が試料グリッドのすぐ近くにくるように、プローブを自動的に移動させることと、
薄い切片を試料グリッドに取り付けることと、
薄い切片から試料プローブの先端を取り外すことと
を含む方法を提供する。
加工物を収容する真空室と、
真空室内の加工物を画像化し、加工物に対して作用する荷電粒子ビームを生成する少なくとも2つの荷電粒子ビーム・カラムと、
真空室内の加工物を保持し、加工物を移動させる可動試料ステージと、
荷電粒子ビームが衝突したときに試料から放出された荷電粒子から画像を形成する荷電粒子検出器と、
サブミクロンの位置決めが可能な試料操作プローブと、
荷電粒子ビーム誘起付着用の前駆体ガスを供給するガス噴射システムと、
この装置の動作を制御する制御装置と、
制御装置によって実行される、上記請求項[000157]1の方法を実行するためのコンピュータ命令を記憶するコンピュータ可読の記憶装置と
を備える装置を提供する。
1つまたは複数の荷電粒子ビーム・システムおよび試料操作プローブを含む真空室内に加工物を装填することと、
操作プローブを、新たな形状へと自動的に物理的に再整形することと、
加工物の一部分から試料を形成するために、荷電粒子ミリング操作を自動的に実行することと、
加工物から試料を取り出すために、再整形後のプローブを使用することと
を含む方法を提供する。
1つまたは複数の荷電粒子ビーム・システムおよび試料操作プローブを含む真空室内に加工物を装填することと、
操作プローブ上に基準マークを形成することと、
加工物の一部分から試料を形成するために、荷電粒子ビーム・ミリング操作を実行することと、
操作プローブ上の基準マークを識別して操作プローブの位置を決定するために、自動化された画像認識を使用することと、
操作プローブを、画像認識ソフトウェアによって決定された位置から、試料に隣接した位置まで自動的に移動させることと、
プローブを試料に取り付けることと、
加工物から試料を取り出すことと
を含む方法を提供する。
1つまたは複数の荷電粒子ビーム・システムおよび試料操作プローブを含む真空室内に加工物を装填することと、
加工物の一部分から試料を形成するために、荷電粒子ビーム・ミリング操作を実行することと、
試料上に基準マークを形成することと、
プローブを試料に取り付けることと、
加工物から試料を取り出すことと、
試料上の基準マークを識別して、試料ホルダに対する試料の位置を決定するために、自動化された画像認識を使用することと、
自動化された画像認識によって決定された試料の位置を使用して、試料を試料ホルダまで自動的に移動させることと
を含む方法を提供する。
1つまたは複数の荷電粒子ビーム・システムおよび試料操作プローブを含む真空室内に加工物を装填することと、
荷電粒子ミリング操作を自動的に実行して、加工物の一部分から試料を形成することと、
操作プローブの一部分の画像を形成することと、
操作プローブを移動させることと、
操作プローブの第2の画像を形成することと、
第1の画像と第2の画像の差を示す差分画像を形成することと、
操作プローブの位置を決定するために、画像認識ソフトウェアを使用することおよび差分画像中の操作プローブの位置を特定することと、
決定された位置を使用して、操作プローブを試料まで移動させることと、
試料を操作プローブに取り付けることと
を含む方法を提供する。
加工物中の関心領域を真空室内で識別することと、
関心領域の両側から材料を除去し、それによって関心領域を含む厚さ100nm未満の薄片を残すために、加工物に向かってイオン・ビームを導くことと、
加工物の上方にある操作プローブの第1の荷電粒子ビーム画像を形成することと、
操作プローブを移動させることと、
加工物の上方にある操作プローブの第2の荷電粒子ビーム画像を形成することと、
第1の画像と第2の画像の差を表す第3の画像を決定することと、
プローブの位置を決定するために、第3の画像中の操作プローブを自動的に認識することと、
操作プローブを薄片に接触させるための軌道または操作プローブを薄片の近くに置くための軌道を決定することと、
操作プローブを移動させて、薄片に接触させるかまたは薄片の近くに置くことと、
操作プローブに向かって前駆体ガスを導くことと、
前駆体ガスを分解し、それによって材料を付着させて、操作プローブを薄片に接続するために、イオン・ビームを導くことと、
薄片を加工物から分離することと、
プローブを、薄片とともに、TEMグリッドまで移動させることと、
薄片をTEMグリッドに取り付けることと、
プローブを薄片から分離することと
を含み、第1の画像と第2の画像の差を表す第3の画像が、第1の画像および第2の画像中の加工物に関連した要素を減らして、第3の画像中での操作プローブの認識を容易にする
方法を提供する。
加工物の上方にある操作ローブの第1の荷電粒子ビーム画像を形成することが、第1の上面画像を形成することを含み、
操作プローブを移動させることが、操作プローブをx−y平面内で移動させることを含み、
加工物の上方にある操作プローブの第2の荷電粒子ビーム画像を形成することが、第2の上面画像を形成することを含み、
第1の画像と第2の画像の差を表す第3の画像を決定すること、
プローブの位置を決定することが、操作プローブのx−y座標を決定するために、第3の画像中の操作プローブを自動的に認識することを含み、
操作プローブを薄片に接触させるための軌道または操作プローブを薄片の近くに置くための軌道を決定することが、x−y平面内で、操作プローブを、操作プローブを薄片に取り付ける位置の上方の点まで移動させるための軌道を決定することを含み、
前記方法が、
表面に対して直角でない荷電粒子ビームによって、操作プローブの第3の荷電粒子ビーム画像を形成することと、
操作プローブをz平面内で移動させることと、
表面に対して直角でない荷電粒子ビームによって、操作プローブの第4の荷電粒子ビーム画像を形成することと、
第3の画像と第4の画像の差を表す第5の画像を決定することと、
Z方向のプローブの位置を決定するために、第5の画像中の操作プローブを自動的に認識することと
をさらに含み、
操作プローブを薄片に接触させるための軌道または操作プローブを薄片の近くに置くための軌道を決定することが、z方向に、操作プローブを、操作プローブを薄片に取り付ける位置の上方の点まで移動させるための軌道を決定することをさらに含む。
第1の荷電粒子ビーム画像を形成することが、第1の電子ビーム画像を形成することを含み、
第2の電荷粒子ビーム画像を形成することが、第2の電子ビーム画像を形成することを含み、
操作プローブの第3の荷電粒子ビーム画像を形成することが、イオン・ビーム画像を形成することを含み、
操作プローブの第4の荷電粒子ビーム画像を形成することが、イオン・ビーム画像を形成することを含む。
請求項[00157]33に記載の各動作を複数回繰返すことと、
それぞれの繰返しと繰返しの間に、それぞれの繰返し中に同じ指定された形状を形成するために、プローブの先端をイオン・ビームでミリングすることであり、指定された形状が画像認識ソフトウェアによって認識可能であることと
を含み、
プローブの位置を決定するために、前記各動作のそれぞれの繰返し中に、第3の画像中の操作プローブを自動的に認識することが、指定された形状を認識することを含む
方法を提供する。
先端の端の位置を特定することと、
肩の位置を特定することと、
所望の先端開始位置から先端の端までの距離が所望の先端長さに一致するように、針に沿った所望の先端開始位置を特定することと、
イオン・ビームを用いて、所望の先端開始位置から少なくとも肩までの第1の材料を針から自動的に除去することと、
先端開始位置から先端の端までの滑らかな表面を生み出すために、イオン・ビームを用いて自動的にミリングすることと、
操作プローブを回転させることと、
イオン・ビームを用いて、所望の先端開始位置から少なくとも肩までの第2の材料を針から自動的に除去することと、
先端開始位置から先端の端までの滑らかな表面を生み出すために、イオン・ビームを用いて自動的にミリングすることと
を含む方法を提供する。
イオン・ビームを用いて第1の材料を針から自動的に除去することが、第1の材料の第1の部分を除去することと、第1の材料の第2の部分を除去することとを含み、第1の材料の第1の部分と第2の部分が、第1の次元の所望の先端太さに対応する距離だけ離れており、
イオン・ビームを用いて第1の材料を針から自動的に除去することが、第2の材料の第1の部分を除去することと、第2の材料の第2の部分を除去することとを含み、第1の材料の第1の部分と第2の部分が、第2の次元の所望の先端太さに対応する距離だけ離れている。
a)荷電粒子ビーム画像中の先端の端の位置を特定することと、
b)エッジ・ロケータ・ツール(edge locator tool)を使用して、画像中の針の上縁の位置を特定することと、
c)エッジ・ロケータ・ツールを使用して、画像中の針の下縁の位置を特定することと、
d)針の上縁および針の下縁から、針軸の位置を決定することと、
e)針の上縁の端の肩の位置を決定するために、エッジ・ロケータ・ツールを針に沿って先端の端の方向に移動させることと、
f)針軸から第1の方向に所望の針太さだけオフセットされた針の第1の領域を、肩からまたは肩の前から始めて、針先端の端から指定された距離のところまでミリングすることであり、この指定された距離が所望の先端長さに対応することと、
g)針軸から第2の方向に所望の針太さだけオフセットされた針の第2の領域を、肩からまたは肩の前から始めて、針先端の端から指定された距離のところまでミリングすることであり、この指定された距離が所望の先端長さに対応することと、
h)針を回転させることと、
i)b〜gを繰返すことと
を含む方法を提供する。
1つまたは複数の荷電粒子ビーム・システムおよび試料操作プローブを有する荷電粒子ビーム・システムの真空室内に加工物を装填することと、
加工物中の関心領域を識別することと、
関心領域の両側から材料を除去し、それによって関心領域を含む厚さ100nm未満の薄片を残すために、加工物に向かってイオン・ビームを導くことと、
薄片上に基準マークを形成するために、イオン・ビームを導くことと、
操作プローブを薄片に取り付けることと、
薄片を加工物から分離することと、
プローブを、薄片とともに、TEMグリッドの近傍に移動させることと、
薄片の基準マークを認識するために、画像認識ソフトウェアを使用することと、
薄片をTEMグリッドの取付け点まで移動させるための軌道を決定するために、薄片の基準マークの位置を使用することと、
薄片をTEMグリッドに取り付けることと
を含む方法を提供する。
1つまたは複数の荷電粒子ビーム・システムおよび試料操作プローブを特徴とする真空室内に加工物を装填することと、
加工物上の関心のエリアを識別することと、
関心領域を含む薄い切片を残すために、関心領域の周囲の材料を除去することと、
プローブの先端に基準マークを形成し、それによって自動システムが先端を識別することができるようにイオン・ビームを導くことと、
基準マークを含むプローブ先端の画像を形成することと、
画像中の基準マークを識別するために、画像認識ソフトウェアを使用ことと、
プローブ先端と薄片上の取付け点との間の変位ベクトルを決定するために、画像認識ソフトウェアによって決定された基準マークの位置を使用することと、
プローブ先端を薄片に接触させるか、または薄片の近くに置くために、変位ベクトルに従ってプローブ先端を移動させることと、
プローブ先端を薄片に取り付けることと、
薄片を加工物から切り離すことと、
プローブ先端を、取り付けられた薄片とともに、TEMグリッドまで移動させることと、
薄片をTEMグリッドに取り付けることと、
プローブを薄片から切り離すことと
を含む方法を提供する。
702 針
704 先端
705 肩
706 イオン・ビームの視野の中心
708 エッジ・ファインダ・ツール
710 針の上縁
720 エッジ・ファインダ・ツール
722 針の下縁
Claims (19)
- 荷電粒子ビーム・システム内での自動化された試料調製の方法であって、
集束イオン・ビームを含む複数の荷電粒子ビーム・システムおよび試料操作プローブを有する真空室内に加工物を装填することと、
前記加工物の薄い切片の周囲の材料を、前記集束イオン・ビームを使用して、小さな取付け構造体によって大きな加工物に取り付けられた前記薄い切片を残して除去することと、
前記集束イオン・ビームを使用して前記試料操作プローブの先端の材料を除去することによって、前記試料操作プローブの前記先端を機械認識が可能な形状に整形することと、
前記薄い切片に対する前記先端の位置を決定するために、前記先端の機械認識が可能な形状および前記複数の荷電粒子ビーム・システムのうちの2つからの画像を使用することと、
前記薄い切片に対する前記先端の位置を使用し、荷電粒子ビーム誘起付着を使用して前記試料操作プローブを取り付けるために、前記試料操作プローブを前記薄い切片に近接して自動的に移動させることと、
前記試料操作プローブを前記薄い切片に取り付けることと、
前記薄い切片が前記試料操作プローブだけによって支持されるように、前記小さな取付け構造体を切り離すことと、
前記薄い切片が、荷電粒子ビーム誘起付着を使用して前記薄い切片を試料グリッドに取り付けるために、薄い試料を保持する前記試料グリッドの近くにくるように、前記試料操作プローブを自動的に移動させることと、
前記薄い切片を前記試料グリッドに取り付けることと、
前記薄い切片から前記試料操作プローブの前記先端を取り外すことと
を含む方法。 - 前記薄い切片が断面観察用の切片である、請求項1に記載の方法。
- 前記試料操作プローブの移動を誘導するために、画像解析を使用することをさらに含む、請求項1に記載の方法。
- 前記先端を鑿形に整形することをさらに含む、請求項1に記載の方法。
- 前記試料操作プローブを前記薄い切片または前記試料グリッドまで移動させるための軌道を決定するために、前記試料操作プローブの位置を画像解析を使用して特定することをさらに含む、請求項1に記載の方法。
- 前記画像解析が画像減算を使用する、請求項5に記載の方法。
- 前記試料操作プローブと前記薄い切片の間のXYベクトルを、第1の荷電粒子ビーム・システムによる画像に基づいて計算し、前記試料操作プローブと前記薄い切片の間のZベクトルを、第2の荷電粒子ビーム・システムによる画像に基づいて計算することをさらに含む、請求項1に記載の方法。
- 前記試料操作プローブから前記薄い切片が取り外された後に前記先端を再整形することをさらに含む、請求項1に記載の方法。
- 前記薄い切片の側面の関心領域から離れた位置に前記試料操作プローブを取り付けることをさらに含む、請求項1に記載の方法。
- 前記薄い切片が前記試料グリッドに取り付けられた後に前記薄い切片をさらに薄くすることをさらに含む、請求項1に記載の方法。
- 荷電粒子システム内での自動化された試料調製のための装置であって、
加工物を収容する真空室と、
前記真空室内の前記加工物を画像化し、前記加工物に対して作用する荷電粒子ビームを生成する少なくとも2つの荷電粒子ビーム・カラムと、
前記真空室内の前記加工物を保持し、前記加工物を移動させる可動試料ステージと、
前記荷電粒子ビームが衝突したときに試料から放出された荷電粒子から画像を形成する荷電粒子検出器と、
サブミクロンの位置決めが可能な試料操作プローブと、
荷電粒子ビーム誘起付着用の前駆体ガスを供給するガス噴射システムと、
前記装置の動作を制御する制御装置と、
前記制御装置によって実行される、請求項1に記載の方法を実行するためのコンピュータ命令を記憶するコンピュータ可読の記憶装置と
を備える装置。 - 2つの荷電粒子ビーム・カラムを含む、請求項11に記載の装置。
- 前記加工物を画像化し、前記加工物に対して作用する荷電粒子ビームを生成する前記少なくとも2つの荷電粒子ビーム・カラムが、電子ビーム・カラムおよびイオン・ビーム・カラムを含む、請求項11に記載の装置。
- 前記コンピュータ記憶装置が、前記荷電粒子ビームによって形成された画像を解析するためのコンピュータ命令を含み、この画像解析が、薄い切片が取り付けられた前記試料操作プローブの位置または薄い切片が取り付けられていない前記試料操作プローブの位置を特定するようにプログラムされている、請求項11に記載の装置。
- 前記画像解析が画像減算を使用して実行される、請求項14に記載の装置。
- 前記集束イオン・ビームが前記試料操作プローブの先端を鑿形に形成するようにするコンピュータ命令を前記コンピュータ記憶装置が含む、請求項14に記載の装置。
- 前記荷電粒子ビームのうちの少なくとも1つが集束イオン・ビームである、請求項11に記載の装置。
- 荷電粒子ビーム・システム内での自動化された試料調製の方法であって、
複数の荷電粒子ビーム・システムおよび試料操作プローブを含む真空室内に加工物を装填することと、
前記試料操作プローブを、新たな形状へと自動的に物理的に再整形することと、
画像認識ソフトウェアおよび前記複数の荷電粒子ビーム・システムのうちの2つからの画像を使用して、再整形後の前記試料操作プローブの位置を自動的に決定することと、
前記加工物の一部分から試料を形成するために、荷電粒子ミリング操作を自動的に実行することと、
前記加工物から前記試料を取り出すために、再整形後の前記試料操作プローブを使用することと
を含む方法。 - 前記試料操作プローブを再整形することが、プローブ先端を直方柱の形状にすることを含む、請求項18に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462077148P | 2014-11-07 | 2014-11-07 | |
| US62/077,148 | 2014-11-07 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016105077A JP2016105077A (ja) | 2016-06-09 |
| JP2016105077A5 JP2016105077A5 (ja) | 2018-12-13 |
| JP6552383B2 true JP6552383B2 (ja) | 2019-07-31 |
Family
ID=54476768
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015215353A Active JP6552383B2 (ja) | 2014-11-07 | 2015-11-01 | 自動化されたtem試料調製 |
Country Status (5)
| Country | Link |
|---|---|
| US (3) | US9601313B2 (ja) |
| EP (1) | EP3018693B1 (ja) |
| JP (1) | JP6552383B2 (ja) |
| KR (1) | KR101970478B1 (ja) |
| CN (1) | CN105588742A (ja) |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6708547B2 (ja) * | 2014-06-30 | 2020-06-10 | 株式会社日立ハイテクサイエンス | 自動試料作製装置 |
| JP6552383B2 (ja) * | 2014-11-07 | 2019-07-31 | エフ・イ−・アイ・カンパニー | 自動化されたtem試料調製 |
| US9837246B1 (en) | 2016-07-22 | 2017-12-05 | Fei Company | Reinforced sample for transmission electron microscope |
| JP7113613B2 (ja) | 2016-12-21 | 2022-08-05 | エフ イー アイ カンパニ | 欠陥分析 |
| JP6931214B2 (ja) * | 2017-01-19 | 2021-09-01 | 株式会社日立ハイテクサイエンス | 荷電粒子ビーム装置 |
| JP6885576B2 (ja) * | 2017-01-19 | 2021-06-16 | 株式会社日立ハイテクサイエンス | 荷電粒子ビーム装置 |
| DE102017202339B3 (de) | 2017-02-14 | 2018-05-24 | Carl Zeiss Microscopy Gmbh | Strahlsystem mit geladenen Teilchen und Verfahren dafür |
| US10303829B2 (en) | 2017-05-31 | 2019-05-28 | International Business Machines Corporation | Automated method for integrated analysis of back end of the line yield, line resistance/capacitance and process performance |
| DE102017212020B3 (de) | 2017-07-13 | 2018-05-30 | Carl Zeiss Microscopy Gmbh | Verfahren zur In-situ-Präparation und zum Transfer mikroskopischer Proben, Computerprogrammprodukt sowie mikroskopische Probe |
| JP7109051B2 (ja) * | 2018-03-30 | 2022-07-29 | 株式会社日立ハイテクサイエンス | 荷電粒子ビーム装置 |
| DE102018108974B3 (de) | 2018-04-16 | 2019-05-09 | Carl Zeiss Microscopy Gmbh | Verfahren zum Herstellen einer TEM-Probe |
| DE102018206278B4 (de) | 2018-04-24 | 2026-02-19 | Carl Zeiss Smt Gmbh | Verfahren und Vorrichtung zum Entfernen eines Partikels von einer photolithographischen Maske |
| DE102018210098B4 (de) | 2018-06-21 | 2022-02-03 | Carl Zeiss Smt Gmbh | Vorrichtung und Verfahren zum Untersuchen und/oder zum Bearbeiten einer Probe |
| DE102018010436B4 (de) | 2018-06-21 | 2025-01-23 | Carl Zeiss Smt Gmbh | Vorrichtung zum Untersuchen und/oder zum Bearbeiten einer Probe |
| CN109011030B (zh) * | 2018-08-08 | 2021-02-09 | 长沙理工大学 | 自动注射仪器针头的位置检测矫正方法及装置 |
| CN110514679B (zh) * | 2019-09-16 | 2021-04-30 | 南京大学 | 一种带有活动拉曼针尖探头的透射电镜原位反应舱芯片及其使用方法 |
| US11355305B2 (en) * | 2019-10-08 | 2022-06-07 | Fei Company | Low keV ion beam image restoration by machine learning for object localization |
| CN110554063B (zh) * | 2019-10-21 | 2021-10-12 | 长江存储科技有限责任公司 | 一种tem样品以及制备tem样品的方法 |
| CN111537533B (zh) * | 2020-03-24 | 2023-06-30 | 天津华慧芯科技集团有限公司 | 一种尖晶石微米颗粒的球差矫正tem样品制备方法 |
| DE102020112220B9 (de) * | 2020-05-06 | 2022-05-25 | Carl Zeiss Microscopy Gmbh | Teilchenstrahlgerät zum Abtragen mindestens eines Materials von einer Materialeinheit und Anordnen des Materials an einem Objekt |
| GB202013591D0 (en) * | 2020-08-28 | 2020-10-14 | Oxford Instr Nanotechnology Ltd | Sample preparation and method aparatus |
| EP4068333A1 (en) * | 2021-03-31 | 2022-10-05 | FEI Company | Sample carrier for use in a charged particle microscope, and a method of using such a sample carrier in a charged particle microscope |
| DE102021205001B4 (de) | 2021-05-18 | 2023-07-27 | Carl Zeiss Microscopy Gmbh | Verfahren zum Positionieren von Objekten in einem Teilchenstrahlmikroskop mithilfe einer flexiblen Teilchenstrahlschranke sowie Computerprogrammprodukt |
| CN114858828A (zh) * | 2022-02-23 | 2022-08-05 | 厦门士兰集科微电子有限公司 | 透射电子显微镜样品的制备方法 |
| TW202447185A (zh) * | 2023-01-19 | 2024-12-01 | 美商Fei公司 | 用於高roi的倒置層狀物之支撐結構 |
| CZ2024342A3 (cs) * | 2024-09-02 | 2026-03-11 | Tescan Group, A.S. | Způsob nalezení pozice špičky manipulátoru |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0542524Y2 (ja) * | 1987-11-18 | 1993-10-26 | ||
| JPH03230696A (ja) * | 1990-02-05 | 1991-10-14 | Nec Corp | 移動体速度検知装置 |
| JP2774884B2 (ja) * | 1991-08-22 | 1998-07-09 | 株式会社日立製作所 | 試料の分離方法及びこの分離方法で得た分離試料の分析方法 |
| JP3613039B2 (ja) * | 1998-12-02 | 2005-01-26 | 株式会社日立製作所 | 試料作製装置 |
| US6405584B1 (en) * | 1999-10-05 | 2002-06-18 | Agere Systems Guardian Corp. | Probe for scanning probe microscopy and related methods |
| US6420722B2 (en) * | 2000-05-22 | 2002-07-16 | Omniprobe, Inc. | Method for sample separation and lift-out with one cut |
| EP1425729B1 (en) | 2001-08-23 | 2014-06-11 | Fei Company | Graphical automated machine control and metrology |
| JP2003156539A (ja) * | 2001-11-26 | 2003-05-30 | Hitachi Ltd | 評価装置および評価方法 |
| WO2005031789A2 (en) * | 2003-09-23 | 2005-04-07 | Zyvex Corporation | Method, system and device for microscopic examination employing fib-prepared sample grasping element |
| JP2005147671A (ja) * | 2003-11-11 | 2005-06-09 | Hitachi Ltd | 荷電粒子線調整方法および装置 |
| JP4130798B2 (ja) * | 2003-12-05 | 2008-08-06 | 株式会社日立ハイテクノロジーズ | プローブ付き複合顕微鏡及びプローブ駆動方法 |
| US20090138995A1 (en) * | 2005-06-16 | 2009-05-28 | Kelly Thomas F | Atom probe component treatments |
| JP2007018935A (ja) * | 2005-07-08 | 2007-01-25 | Hitachi High-Technologies Corp | プローブ付き顕微鏡及びプローブ接触方法 |
| US8357913B2 (en) * | 2006-10-20 | 2013-01-22 | Fei Company | Method and apparatus for sample extraction and handling |
| JP5270558B2 (ja) * | 2006-10-20 | 2013-08-21 | エフ・イ−・アイ・カンパニー | S/temのサンプルを作成する方法およびサンプル構造 |
| JP2008210732A (ja) * | 2007-02-28 | 2008-09-11 | Hitachi High-Technologies Corp | 荷電粒子ビーム装置 |
| US7834315B2 (en) * | 2007-04-23 | 2010-11-16 | Omniprobe, Inc. | Method for STEM sample inspection in a charged particle beam instrument |
| JP5537058B2 (ja) * | 2009-03-30 | 2014-07-02 | 株式会社日立ハイテクノロジーズ | 試料作製装置、及び試料作製装置における制御方法 |
| EP2560186A4 (en) * | 2010-04-16 | 2014-12-24 | Hitachi High Tech Corp | ION BEAM DEVICE AND ION BEAM PROCESSING METHOD |
| WO2013082496A1 (en) * | 2011-12-01 | 2013-06-06 | Fei Company | High throughput tem preparation processes and hardware for backside thinning of cross-sectional view lamella |
| US10465293B2 (en) * | 2012-08-31 | 2019-11-05 | Fei Company | Dose-based end-pointing for low-kV FIB milling TEM sample preparation |
| JP6708547B2 (ja) * | 2014-06-30 | 2020-06-10 | 株式会社日立ハイテクサイエンス | 自動試料作製装置 |
| JP6552383B2 (ja) * | 2014-11-07 | 2019-07-31 | エフ・イ−・アイ・カンパニー | 自動化されたtem試料調製 |
-
2015
- 2015-11-01 JP JP2015215353A patent/JP6552383B2/ja active Active
- 2015-11-04 EP EP15192862.9A patent/EP3018693B1/en active Active
- 2015-11-06 CN CN201510749549.5A patent/CN105588742A/zh active Pending
- 2015-11-06 KR KR1020150155516A patent/KR101970478B1/ko active Active
- 2015-11-06 US US14/934,837 patent/US9601313B2/en active Active
-
2017
- 2017-03-20 US US15/464,307 patent/US10340119B2/en active Active
-
2019
- 2019-05-13 US US16/410,774 patent/US10825651B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016105077A (ja) | 2016-06-09 |
| CN105588742A (zh) | 2016-05-18 |
| US10825651B2 (en) | 2020-11-03 |
| US20160141147A1 (en) | 2016-05-19 |
| US20170256380A1 (en) | 2017-09-07 |
| US20190272975A1 (en) | 2019-09-05 |
| EP3018693B1 (en) | 2018-12-26 |
| EP3018693A1 (en) | 2016-05-11 |
| KR101970478B1 (ko) | 2019-04-19 |
| US9601313B2 (en) | 2017-03-21 |
| KR20160055076A (ko) | 2016-05-17 |
| US10340119B2 (en) | 2019-07-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6552383B2 (ja) | 自動化されたtem試料調製 | |
| JP6188792B2 (ja) | Tem観察用の薄片の調製 | |
| US10529538B2 (en) | Endpointing for focused ion beam processing | |
| KR102579329B1 (ko) | Cad 지원 tem 샘플 제작 레시피 생성 | |
| JP6541161B2 (ja) | 荷電粒子ビーム装置 | |
| JP6586261B2 (ja) | 大容量temグリッド及び試料取り付け方法 | |
| US11004651B2 (en) | Tomography-assisted TEM prep with requested intervention automation workflow | |
| KR102056507B1 (ko) | 하전 입자 빔 장치 및 시료 관찰 방법 | |
| KR20150102119A (ko) | 하전 입자 비임을 이용한 경사지거나 비스듬한 밀 작업들을 위한 기준 설계 | |
| JP6542608B2 (ja) | 荷電粒子ビーム装置 | |
| WO2015181808A1 (en) | Method and apparatus for slice and view sample imaging | |
| CN106206224B (zh) | 用于校正带电粒子束系统中的偏移的方法和装置 | |
| JP5409685B2 (ja) | イオンビーム装置および加工方法 | |
| CN109841534A (zh) | 截面加工观察方法、带电粒子束装置 | |
| CN117849084A (zh) | 从大块样品中制备感兴趣体积的方法及计算机程序产品 | |
| TWI891170B (zh) | 射線裝置,薄片抽出裝置,薄片觀察系統及薄片製作方法 | |
| JP2005135761A (ja) | Fibを用いた加工焦点位置修正方法とそれを実施する装置 | |
| CN116930232A (zh) | 用于分析三维特征部的方法及系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181031 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181031 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20181121 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20190115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190404 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190618 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190702 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6552383 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |