JP6547300B2 - 運動解析装置、運動解析方法、プログラム、及び運動解析システム - Google Patents
運動解析装置、運動解析方法、プログラム、及び運動解析システム Download PDFInfo
- Publication number
- JP6547300B2 JP6547300B2 JP2015004347A JP2015004347A JP6547300B2 JP 6547300 B2 JP6547300 B2 JP 6547300B2 JP 2015004347 A JP2015004347 A JP 2015004347A JP 2015004347 A JP2015004347 A JP 2015004347A JP 6547300 B2 JP6547300 B2 JP 6547300B2
- Authority
- JP
- Japan
- Prior art keywords
- angular velocity
- impact
- motion analysis
- unit
- distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

























Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B69/00—Training appliances or apparatus for special sports
- A63B69/36—Training appliances or apparatus for special sports for golf
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0003—Analysing the course of a movement or motion sequences during an exercise or trainings sequence, e.g. swing for golf or tennis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1121—Determining geometric values, e.g. centre of rotation or angular range of movement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6887—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient mounted on external non-worn devices, e.g. non-medical devices
- A61B5/6895—Sport equipment
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7235—Details of waveform analysis
- A61B5/7246—Details of waveform analysis using correlation, e.g. template matching or determination of similarity
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B69/00—Training appliances or apparatus for special sports
- A63B69/0002—Training appliances or apparatus for special sports for baseball
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B69/00—Training appliances or apparatus for special sports
- A63B69/38—Training appliances or apparatus for special sports for tennis
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
- A63B71/0619—Displays, user interfaces and indicating devices, specially adapted for sport equipment, e.g. display mounted on treadmills
- A63B71/0622—Visual, audio or audio-visual systems for entertaining, instructing or motivating the user
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0219—Inertial sensors, e.g. accelerometers, gyroscopes, tilt switches
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1121—Determining geometric values, e.g. centre of rotation or angular range of movement
- A61B5/1122—Determining geometric values, e.g. centre of rotation or angular range of movement of movement trajectories
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1126—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb using a particular sensing technique
- A61B5/1128—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb using a particular sensing technique using image analysis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7271—Specific aspects of physiological measurement analysis
- A61B5/7282—Event detection, e.g. detecting unique waveforms indicative of a medical condition
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B69/00—Training appliances or apparatus for special sports
- A63B69/0002—Training appliances or apparatus for special sports for baseball
- A63B2069/0004—Training appliances or apparatus for special sports for baseball specially adapted for particular training aspects
- A63B2069/0008—Training appliances or apparatus for special sports for baseball specially adapted for particular training aspects for batting
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/40—Acceleration
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/62—Time or time measurement used for time reference, time stamp, master time or clock signal
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
- A63B2220/803—Motion sensors
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
- A63B2220/83—Special sensors, transducers or devices therefor characterised by the position of the sensor
- A63B2220/833—Sensors arranged on the exercise apparatus or sports implement
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2225/00—Miscellaneous features of sport apparatus, devices or equipment
- A63B2225/50—Wireless data transmission, e.g. by radio transmitters or telemetry
Description
図1は、本発明の第1の実施の形態に係る運動解析システムの概要を示す図である。
次に、第2の実施の形態について、図面を参照して説明する。第2の実施の形態では、関係情報の内容が第1の実施の形態と異なる。例えば、第2の実施の形態では、記憶部24には、シャフト部3aの角速度を打球部3bのスピードで除算した情報(値)と、打球位置のずれ量との関係を示した関係情報が予め記憶される。そして、算出部212は、センサー情報取得部210によって取得されたインパクト時における角速度を、インパクト時における打球部3bのスピードで除算し、除算して得た値に基づいて記憶部24を参照し、打球位置のずれ量を算出する。以下では、第1の実施の形態と異なる部分について説明する。
次に、第3の実施の形態について、図面を参照して説明する。関係情報は、一般的にゴルフクラブ3のタイプ(本発明の形状に相当する)によって変わる。例えば、パターには、ピンタイプ、マレットタイプ、及びネオマレットタイプ等が存在し、それぞれのタイプに応じて関係情報は異なる。第3の実施の形態では、ゴルフクラブ3のタイプに応じた関係情報を記憶部24に記憶し、ユーザー2が使用するゴルフクラブ3もタイプに応じて、打球位置のずれ量を算出する関係情報を切替える。以下では、第1の実施の形態及び第2の実施の形態と異なる部分について説明する。
次に、第4の実施の形態について、図面を参照して説明する。第3の実施の形態では、ゴルフクラブ3のタイプに応じた関係情報を記憶部24に記憶するようにしたが、第4の実施の形態では、様々なタイプに対応できる関係情報を記憶部24に記憶する。以下では、上記の各実施の形態と異なる部分について説明する。
次に、第5の実施の形態について、図面を参照して説明する。第5の実施の形態では、取得者が測定する水平方向の打点測定値を、垂直方向の打点測定値と、ゴルフクラブ3のライ角とで補正する。
次に、第6の実施の形態について、図面を参照して説明する。第2の実施の形態では、シャフト部3aの角速度を打球部3bのスピードで除算した値と、打球位置のずれ量との関係を関係情報とした。第6の実施の形態では、シャフト部3aの角速度をテークバックの距離で除算した値と、打球位置のずれ量との関係を関係情報とする。
次に、第7の実施の形態について、図面を参照して説明する。第6の実施の形態では、シャフト部3aの角速度を打球部3bのテークバック距離で除算した値と、打球位置のずれ量との関係を関係情報とした。第7の実施の形態では、シャフト部3aの角速度をテークバック角度で除算した値と、打球位置のずれ量との関係を関係情報とする。
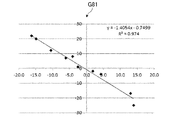
次に、第8の実施の形態について、図面を参照して説明する。第8の実施の形態では、インパクト前の角速度の平均値を算出し、インパクト時の角速度から、算出した角速度の平均値を減算して、インパクト時の角速度とする。
2:ユーザー
3:ゴルフクラブ
3a:シャフト部
3b:打球部
3c:打球面
10:センサーユニット
20:運動解析装置
21:制御部
210:センサー情報取得部
211:運動解析部
212:算出部
213:画像生成部
214:出力処理部
22:通信部
23:操作部
24:記憶部
25:表示部
26:音声出力部
31:関係情報
40:画面
Claims (9)
- 運動器具を用いたスイングを解析する運動解析装置であって、
運動器具のシャフト部の軸の回りに発生する角速度を取得する取得部と、
スイングにおける打球のインパクトを検出する検出部と、
前記インパクトに発生する前記角速度に基づいて、運動器具の打球部の打球面に設定した基準位置から打球の位置までの距離を算出する算出部と、
を有し、
前記算出部は、予め取得された、前記インパクトに発生する前記角速度と前記基準位置から打球の位置までの距離との相関関係を示した関係情報を参照して、前記距離を算出する、
ことを特徴とする運動解析装置。 - 請求項1に記載の運動解析装置であって、
前記関係情報の角速度は、予め取得された、運動器具の打球部のインパクト時のスピードで除算されており、
前記算出部は、前記インパクトに発生する前記角速度を、スイングされた運動器具の打球部のインパクト時のスピードで除算し、除算して得られた値に基づいて前記関係情報を参照して、前記距離を算出する、
ことを特徴とする運動解析装置。 - 請求項1に記載の運動解析装置であって、
前記関係情報は、予め運動器具の打球部の形状に応じて取得され、
前記算出部は、スイングされた運動器具の打球部の形状に応じた前記関係情報を参照して前記距離を算出する、
ことを特徴とする運動解析装置。 - 請求項1に記載の運動解析装置であって、
前記関係情報の角速度は、予め取得されたテークバック距離で除算されており、
前記算出部は、前記インパクトに発生する前記角速度を、スイングされた運動器具のテークバック距離で除算し、除算して得られた値に基づいて前記関係情報を参照して、前記距離を算出する、
ことを特徴とする運動解析装置。 - 請求項1に記載の運動解析装置であって、
前記関係情報の角速度は、予め取得されたテークバック角度で除算されており、
前記算出部は、前記インパクトに発生する前記角速度を、スイングされた運動器具のテークバック角度で除算し、除算して得られた値に基づいて前記関係情報を参照して、前記距離を算出する、
ことを特徴とする運動解析装置。 - 請求項1乃至5のいずれか一項に記載の運動解析装置であって、
前記算出部は、前記インパクト前の前記角速度の平均値を算出し、前記インパクトに発生する前記角速度から前記平均値を減算した値に基づいて前記距離を算出する、
ことを特徴とする運動解析装置。 - 運動器具のシャフト部の軸の回りに発生する角速度を取得する取得工程と、
スイングにおける打球のインパクトを検出する検出工程と、
前記インパクトに発生する前記角速度に基づいて、運動器具の打球部の打球面に設定した基準位置から打球の位置までの距離を算出する算出工程と、
を含み、
前記算出工程は、予め取得された、前記インパクトに発生する前記角速度と前記基準位置から打球の位置までの距離との相関関係を示した関係情報を参照して、前記距離を算出する、
ことを特徴とする運動解析方法。 - 運動器具のシャフト部の軸の回りに発生する角速度を取得する取得工程と、
スイングにおける打球のインパクトを検出する検出工程と、
前記インパクトに発生する前記角速度に基づいて、運動器具の打球部の打球面に設定した基準位置から打球の位置までの距離を算出する算出工程と、
をコンピューターに実行させ、
前記算出工程は、予め取得された、前記インパクトに発生する前記角速度と前記基準位置から打球の位置までの距離との相関関係を示した関係情報を参照して、前記距離を算出する、
ことを特徴とするプログラム。 - 運動器具のシャフト部の軸の回りの角速度を計測する慣性センサーと、
前記運動器具を用いたスイングを解析する運動解析装置と、を有する運動解析システムであって、
前記運動解析装置は、
前記角速度を取得する取得部と、
スイングにおける打球のインパクトを検出する検出部と、
前記インパクトに発生する前記角速度に基づいて、運動器具の打球部の打球面に設定した基準位置から打球の位置までの距離を算出する算出部と、
を有し、
前記算出部は、予め取得された、前記インパクトに発生する前記角速度と前記基準位置から打球の位置までの距離との相関関係を示した関係情報を参照して、前記距離を算出する、
ことを特徴とする運動解析システム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015004347A JP6547300B2 (ja) | 2015-01-13 | 2015-01-13 | 運動解析装置、運動解析方法、プログラム、及び運動解析システム |
| US15/540,236 US10843040B2 (en) | 2015-01-13 | 2015-12-10 | Exercise analysis device, exercise analysis method, program, recording medium, and exercise analysis system |
| CN201580072976.2A CN107106899A (zh) | 2015-01-13 | 2015-12-10 | 运动分析装置、运动分析方法、程序、记录介质、以及运动分析系统 |
| PCT/JP2015/006168 WO2016113796A1 (ja) | 2015-01-13 | 2015-12-10 | 運動解析装置、運動解析方法、プログラム、記録媒体、及び運動解析システム |
| TW105100698A TW201625337A (zh) | 2015-01-13 | 2016-01-11 | 運動解析裝置、運動解析方法、程式、記錄媒體、以及運動解析系統 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015004347A JP6547300B2 (ja) | 2015-01-13 | 2015-01-13 | 運動解析装置、運動解析方法、プログラム、及び運動解析システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016129565A JP2016129565A (ja) | 2016-07-21 |
| JP2016129565A5 JP2016129565A5 (ja) | 2018-02-22 |
| JP6547300B2 true JP6547300B2 (ja) | 2019-07-24 |
Family
ID=56405366
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015004347A Active JP6547300B2 (ja) | 2015-01-13 | 2015-01-13 | 運動解析装置、運動解析方法、プログラム、及び運動解析システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10843040B2 (ja) |
| JP (1) | JP6547300B2 (ja) |
| CN (1) | CN107106899A (ja) |
| TW (1) | TW201625337A (ja) |
| WO (1) | WO2016113796A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6862848B2 (ja) * | 2017-01-23 | 2021-04-21 | セイコーエプソン株式会社 | 運動解析装置、運動解析方法、プログラム、及び運動解析システム |
| JP6822173B2 (ja) * | 2017-01-25 | 2021-01-27 | セイコーエプソン株式会社 | 運動解析装置、運動解析方法、プログラム、及び運動解析システム |
| JP2018130204A (ja) * | 2017-02-14 | 2018-08-23 | セイコーエプソン株式会社 | 運動解析装置および解析方法 |
| CN108504294A (zh) * | 2017-02-24 | 2018-09-07 | 昆山雅森电子材料科技有限公司 | 一种高频有色超薄覆盖膜及制备方法 |
| US11224787B2 (en) * | 2017-07-13 | 2022-01-18 | Prgr Co., Ltd. | Swing measurement device, swing measurement method, and swing measurement program |
| US10918920B2 (en) * | 2017-09-14 | 2021-02-16 | Intel Corporation | Apparatus and methods to track movement of sports implements |
| US10695632B2 (en) | 2017-11-14 | 2020-06-30 | Intel Corporation | Apparatus and methods to track movement of sports implements |
| KR102062038B1 (ko) * | 2018-02-28 | 2020-01-03 | 김성완 | 스윙 분석장치 |
| CN113058246A (zh) * | 2021-03-23 | 2021-07-02 | 清华大学 | 一种轮椅冰壶轨迹识别定位跟踪与运动状态检测系统 |
| CN113033384A (zh) * | 2021-03-23 | 2021-06-25 | 清华大学 | 一种轮椅冰壶运动状态检测和目标跟踪系统 |
| CN113397530B (zh) * | 2021-06-16 | 2022-03-18 | 国家体育总局体育科学研究所 | 一种可进行膝关节功能评估的智能矫正系统和方法 |
| JP6978025B1 (ja) * | 2021-06-30 | 2021-12-08 | 丸井 智敬 | 打撃者の打撃支援システム |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4291574A (en) * | 1976-01-05 | 1981-09-29 | Frolow Jack L | Tennis racket |
| US4165071A (en) | 1976-01-05 | 1979-08-21 | Frolow Jack L | Tennis racket |
| JPH03126477A (ja) | 1989-10-11 | 1991-05-29 | Maruman Golf Corp | スイング分析装置 |
| JP2646826B2 (ja) * | 1990-10-01 | 1997-08-27 | 株式会社村田製作所 | スイング練習器 |
| JPH0796044B2 (ja) | 1992-04-22 | 1995-10-18 | 光雄 浦 | 打球練習装置 |
| JP2002017932A (ja) | 2000-07-10 | 2002-01-22 | Kodera Electronics Co Ltd | 打数認識装置、及びスコア出力装置 |
| JP3696877B1 (ja) | 2005-04-06 | 2005-09-21 | 邦博 田村 | ゴルフシステム |
| JP2010284177A (ja) | 2007-10-05 | 2010-12-24 | Akinari Ichiie | シャフト部に画像センサを有するゴルフクラブ |
| JP2009125499A (ja) * | 2007-11-27 | 2009-06-11 | Panasonic Electric Works Co Ltd | テニススイング改善支援システム |
| JP2011515164A (ja) * | 2008-03-22 | 2011-05-19 | リヒャルト イェッケル | ゴルフクラブのヒッティング精度及びスイング運動を監視するための装置及び方法 |
| US8257191B2 (en) * | 2009-08-27 | 2012-09-04 | Nike, Inc. | Golf clubs and golf club heads having digital lie and/or other angle measuring equipment |
| US8882606B2 (en) | 2010-01-28 | 2014-11-11 | Nike, Inc. | Golf swing data gathering method and system |
| US8696482B1 (en) * | 2010-10-05 | 2014-04-15 | Swingbyte, Inc. | Three dimensional golf swing analyzer |
| JP5773121B2 (ja) * | 2010-12-20 | 2015-09-02 | セイコーエプソン株式会社 | スイング分析装置及びスイング分析プログラム |
| JP5773122B2 (ja) | 2010-12-20 | 2015-09-02 | セイコーエプソン株式会社 | スイング分析装置及びスイング分析プログラム |
| CN102553194B (zh) * | 2010-12-20 | 2015-07-22 | 精工爱普生株式会社 | 摆动分析装置 |
| JP5099799B1 (ja) | 2012-02-15 | 2012-12-19 | 仁 新井 | パットの練習方法。 |
| JP6551123B2 (ja) * | 2015-10-05 | 2019-07-31 | 住友ゴム工業株式会社 | 打点推定装置 |
-
2015
- 2015-01-13 JP JP2015004347A patent/JP6547300B2/ja active Active
- 2015-12-10 CN CN201580072976.2A patent/CN107106899A/zh active Pending
- 2015-12-10 US US15/540,236 patent/US10843040B2/en active Active
- 2015-12-10 WO PCT/JP2015/006168 patent/WO2016113796A1/ja active Application Filing
-
2016
- 2016-01-11 TW TW105100698A patent/TW201625337A/zh unknown
Also Published As
| Publication number | Publication date |
|---|---|
| US10843040B2 (en) | 2020-11-24 |
| JP2016129565A (ja) | 2016-07-21 |
| WO2016113796A1 (ja) | 2016-07-21 |
| CN107106899A (zh) | 2017-08-29 |
| TW201625337A (zh) | 2016-07-16 |
| US20170348560A1 (en) | 2017-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6547300B2 (ja) | 運動解析装置、運動解析方法、プログラム、及び運動解析システム | |
| US20140379294A1 (en) | Motion analysis method and motion analysis device | |
| TW201501752A (zh) | 運動解析方法及運動解析裝置 | |
| US20170007880A1 (en) | Motion analysis method, motion analysis apparatus, motion analysis system, and program | |
| JP2015156882A (ja) | 運動解析装置及び運動解析システム | |
| JP2016116719A (ja) | 運動解析装置、運動解析システム、運動解析方法及びプログラム | |
| JP2017023638A (ja) | スイング診断装置、スイング診断システム、スイング診断方法、スイング診断プログラム及び記録媒体 | |
| JP2017023639A (ja) | スイング診断装置、スイング診断システム、スイング診断方法、スイング診断プログラム及び記録媒体 | |
| JP2016067410A (ja) | 運動解析装置、運動解析システム、運動解析方法及びプログラム | |
| WO2015141183A1 (ja) | 運動解析装置、運動解析システム、運動解析方法、運動解析情報の表示方法及びプログラム | |
| JP2016116566A (ja) | 運動解析装置、運動解析方法、プログラム、及び運動解析システム | |
| WO2015146062A1 (ja) | 運動解析方法、運動解析装置、運動解析システム及びプログラム | |
| JP2016116615A (ja) | 運動解析装置、運動解析システム、運動解析方法、及びプログラム | |
| JP2016116613A (ja) | 運動解析装置、運動解析システム、運動解析方法、及びプログラム | |
| JP2016055028A (ja) | 運動解析方法、運動解析装置、運動解析システム及びプログラム | |
| JP6315181B2 (ja) | 運動解析方法、運動解析装置、運動解析システム及びプログラム | |
| JP6862848B2 (ja) | 運動解析装置、運動解析方法、プログラム、及び運動解析システム | |
| US20160030805A1 (en) | Motion analysis method, motion analysis device, and program | |
| JP6862931B2 (ja) | 運動解析装置、運動解析方法、運動解析システムおよび表示方法 | |
| JP6822173B2 (ja) | 運動解析装置、運動解析方法、プログラム、及び運動解析システム | |
| JP2017012586A (ja) | スイングデータ演算装置、スイングデータ演算システム、スイングデータ演算方法、及びプログラム | |
| JP6852589B2 (ja) | 打具の挙動の解析装置 | |
| JP2017136149A (ja) | スイング解析装置、スイング解析システム、スイング解析方法、スイング解析プログラム、及び記録媒体 | |
| JP2018130204A (ja) | 運動解析装置および解析方法 | |
| JP2018121900A (ja) | 運動解析装置、運動解析方法、表示方法、運動解析システム、および運動解析プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180110 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181120 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190107 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190528 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190610 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6547300 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |