JP6533366B2 - 冷凍装置および冷凍機の制御装置 - Google Patents
冷凍装置および冷凍機の制御装置 Download PDFInfo
- Publication number
- JP6533366B2 JP6533366B2 JP2014052691A JP2014052691A JP6533366B2 JP 6533366 B2 JP6533366 B2 JP 6533366B2 JP 2014052691 A JP2014052691 A JP 2014052691A JP 2014052691 A JP2014052691 A JP 2014052691A JP 6533366 B2 JP6533366 B2 JP 6533366B2
- Authority
- JP
- Japan
- Prior art keywords
- compressor
- pressure
- suction
- surge
- discharge
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 86
- 238000005057 refrigeration Methods 0.000 claims description 25
- 238000001514 detection method Methods 0.000 claims description 23
- 238000012545 processing Methods 0.000 claims description 19
- 238000009413 insulation Methods 0.000 claims description 17
- 238000009434 installation Methods 0.000 claims description 14
- 238000003860 storage Methods 0.000 claims description 12
- 238000006073 displacement reaction Methods 0.000 claims description 10
- 238000005259 measurement Methods 0.000 claims description 8
- 230000010354 integration Effects 0.000 claims description 7
- 230000005856 abnormality Effects 0.000 claims description 3
- 230000002159 abnormal effect Effects 0.000 claims 4
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 64
- 238000004364 calculation method Methods 0.000 description 47
- 230000006835 compression Effects 0.000 description 44
- 238000007906 compression Methods 0.000 description 44
- 239000003507 refrigerant Substances 0.000 description 28
- 238000000034 method Methods 0.000 description 26
- 230000006870 function Effects 0.000 description 25
- 230000008569 process Effects 0.000 description 10
- 238000013461 design Methods 0.000 description 8
- 238000012937 correction Methods 0.000 description 7
- 239000007788 liquid Substances 0.000 description 7
- 229920006395 saturated elastomer Polymers 0.000 description 5
- 238000003079 width control Methods 0.000 description 5
- 230000007423 decrease Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 239000012530 fluid Substances 0.000 description 3
- 230000000704 physical effect Effects 0.000 description 3
- 238000009530 blood pressure measurement Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 239000000498 cooling water Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000007710 freezing Methods 0.000 description 2
- 230000008014 freezing Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000013021 overheating Methods 0.000 description 2
- 230000001052 transient effect Effects 0.000 description 2
- 101100396755 Spinacia oleracea AHRI gene Proteins 0.000 description 1
- 238000004378 air conditioning Methods 0.000 description 1
- 230000002528 anti-freeze Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000005494 condensation Effects 0.000 description 1
- 238000009833 condensation Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 238000001704 evaporation Methods 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000003607 modifier Substances 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000010349 pulsation Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 239000012047 saturated solution Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000004781 supercooling Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images












Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B49/00—Arrangement or mounting of control or safety devices
- F25B49/02—Arrangement or mounting of control or safety devices for compression type machines, plants or systems
- F25B49/022—Compressor control arrangements
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B1/00—Compression machines, plants or systems with non-reversible cycle
- F25B1/04—Compression machines, plants or systems with non-reversible cycle with compressor of rotary type
- F25B1/053—Compression machines, plants or systems with non-reversible cycle with compressor of rotary type of turbine type
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B49/00—Arrangement or mounting of control or safety devices
- F25B49/02—Arrangement or mounting of control or safety devices for compression type machines, plants or systems
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B1/00—Compression machines, plants or systems with non-reversible cycle
- F25B1/10—Compression machines, plants or systems with non-reversible cycle with multi-stage compression
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B2339/00—Details of evaporators; Details of condensers
- F25B2339/04—Details of condensers
- F25B2339/047—Water-cooled condensers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B2400/00—General features or devices for refrigeration machines, plants or systems, combined heating and refrigeration systems or heat-pump systems, i.e. not limited to a particular subgroup of F25B
- F25B2400/13—Economisers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B2400/00—General features or devices for refrigeration machines, plants or systems, combined heating and refrigeration systems or heat-pump systems, i.e. not limited to a particular subgroup of F25B
- F25B2400/23—Separators
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B25/00—Machines, plants or systems, using a combination of modes of operation covered by two or more of the groups F25B1/00 - F25B23/00
- F25B25/005—Machines, plants or systems, using a combination of modes of operation covered by two or more of the groups F25B1/00 - F25B23/00 using primary and secondary systems
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B2600/00—Control issues
- F25B2600/02—Compressor control
- F25B2600/025—Compressor control by controlling speed
- F25B2600/0253—Compressor control by controlling speed with variable speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B2600/00—Control issues
- F25B2600/25—Control of valves
- F25B2600/2513—Expansion valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B2700/00—Sensing or detecting of parameters; Sensors therefor
- F25B2700/19—Pressures
- F25B2700/195—Pressures of the condenser
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B2700/00—Sensing or detecting of parameters; Sensors therefor
- F25B2700/19—Pressures
- F25B2700/197—Pressures of the evaporator
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B2700/00—Sensing or detecting of parameters; Sensors therefor
- F25B2700/21—Temperatures
- F25B2700/2109—Temperatures of a separator
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B2700/00—Sensing or detecting of parameters; Sensors therefor
- F25B2700/21—Temperatures
- F25B2700/2116—Temperatures of a condenser
- F25B2700/21161—Temperatures of a condenser of the fluid heated by the condenser
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B2700/00—Sensing or detecting of parameters; Sensors therefor
- F25B2700/21—Temperatures
- F25B2700/2116—Temperatures of a condenser
- F25B2700/21162—Temperatures of a condenser of the refrigerant at the inlet of the condenser
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25B—REFRIGERATION MACHINES, PLANTS OR SYSTEMS; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS
- F25B2700/00—Sensing or detecting of parameters; Sensors therefor
- F25B2700/21—Temperatures
- F25B2700/2117—Temperatures of an evaporator
- F25B2700/21171—Temperatures of an evaporator of the fluid cooled by the evaporator
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02B—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO BUILDINGS, e.g. HOUSING, HOUSE APPLIANCES OR RELATED END-USER APPLICATIONS
- Y02B30/00—Energy efficient heating, ventilation or air conditioning [HVAC]
- Y02B30/70—Efficient control or regulation technologies, e.g. for control of refrigerant flow, motor or heating
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Thermal Sciences (AREA)
- General Engineering & Computer Science (AREA)
- Control Of Positive-Displacement Air Blowers (AREA)
- Air Conditioning Control Device (AREA)
Description
《数1》(M+m)/M=1+(Hcl−Hel)/(Heg−Hcl)
《数2》EXV_POS
=[(553×EXV_Cap−48×リフト温度)/100+Offset]×Gain/100+EXV_Os
《数3》擬似蒸発器水量[m3/h]
=定格圧縮機能力[TR]×3024[kcal/h/TR]/擬似定格水温差[℃]/Cpw[kcal/kg/℃]/Dw[kg/m3]
《数4》圧縮機体積流量[m3/min]
=定格体積流量×係数Fc×係数Fd×補正係数FDDC×シュラウドカットモデル補正係数
《数5》吸入質量流量[kg/h]
=圧縮機体積流量[m3/min]×60[min/h]×吸入ガス密度[kg/m3]
《数6》冷凍能力[kJ/kg]
=吸入ガスエンタルピ(Hsg)[kJ/kg]−エコノマイザにおける飽和液のエンタルピ(Hel)[kJ/kg]
《数7》圧縮機能力[TR]=
吸入質量流量[kg/h]×冷凍能力[kJ/kg]/4.1868[kJ/kcal]/3024[kcal/h/TR]
《数8》擬似蒸発器水温差(PE_DT)
=現在の圧縮機能力[TR]×3024[kcal/h/TR]/擬似蒸発器水量[m3/h]/Cpw[kcal/kg/℃]/Dw[kg/m3]
《数9》(M+m)={1+(Hcl−Hel)/(Heg−Hcl)}×M
《数10》圧力[kPaG,ゲージ圧基準]
=スロープ補正係数×ゲージ圧[kPaG]+Offset
《数11》大気圧[kPa]
=101.325×{1−(0.0065×標高[m]/(0.0065×標高[m]+15+273.15)}5.257
《数12》計算吸入圧力損失[kPa]
=定格吸入圧力損失×[%体積流量]2+吸入圧力損失Offset
=定格吸入圧力損失×[現在の体積流量/定格体積流量]2+吸入圧力損失Offset
《数13》計算吐出圧力損失[kPa]
=定格吐出圧力損失×[%体積流量]2+吐出圧力損失Offset
=定格吐出圧力損失×[現在の体積流量/定格体積流量]2+吐出圧力損失Offset
《数14》圧力[kPaA,絶対圧力基準]
=圧力[kPaG,ゲージ圧基準]+大気圧
《数15》吸入圧力(kPaA)=蒸発器圧力(kPaA)−吸入圧力損失(kPa)
《数16》吐出圧力(kPaA)=凝縮器圧力(kPaA)+吐出圧力損失(kPa)
《数17》吸入圧力(kPaG)=蒸発器圧力(kPaG)−吸入圧力損失(kPa)
《数18》吐出圧力(kPaG)=凝縮器圧力(kPaG)+吐出圧力損失(kPa)
《数19》吸入過熱度[℃]=吸入温度[℃]−飽和吸入温度[℃]
《数20》飽和吸入温度[℃]
=a1×(ln(Ps))3+a2×(ln(Ps))2+a3×ln(Ps)+a4
《数21》吸入ガスエンタルピ[kJ/kg]
=飽和状態におけるガスエンタルピ×一般過熱状態におけるガスエンタルピ乗数
《数22》飽和状態におけるガスエンタルピ
=a16×(√(Ps))5+a17×(√(Ps))4+a18×(√(Ps))3+a19×(√(Ps))2+a20×√(Ps)+a21
《数23》一般過熱状態におけるガスエンタルピ乗数
=1+A1×(√(Ps))2+B1×√(Ps)+C1
=1+(a22×SSH4+a23×SSH3+a24×SSH2+a25×SSH)×(√(Ps))2+(a26×SSH4+a27×SSH3+a28×SSH2+a29×SSH)×√(Ps)+(a30×SSH4+a31×SSH3+a32×SSH2+a33×SSH)
《数24》断熱吐出ガスエンタルピ[kJ/kg]
=吸入過熱度が0の場合の吐出断熱ヘッド×吐出断熱エンタルピ乗数1×吐出断熱エンタルピ乗数2
《数25》吸入過熱度が0の場合の吐出断熱ヘッド[kJ/kg]
={a55×(√(Pd))4+a56×(√(Pd))3+a57×(√(Pd))2+a58×√(Pd)+a59}×(√(Ps))3+{a60×(√(Pd))4+a61×(√(Pd))3+a62×(√(Pd))2+a63×√(Pd)+a64}×(√(Ps))2+{a65×(√(Pd))4+a66×(√(Pd))3+a67×(√(Pd))2+a68×√(Pd)+a69}×√(Ps)+a70×(√(Pd))4+a71×(√(Pd))3+a72×(√(Pd))2+a73×√(Pd)+a74+400
《数26》吐出断熱エンタルピ乗数1
=(a75×SSH2+a76×SSH+a77)×Pd3+(a78×SSH2+a79×SSH+a80)×Pd2+(a81×SSH2+a82×SSH+a83)×Pd+a84×SSH2+a85×SSH+a86
《数27》吐出断熱エンタルピ乗数2
=a87×Ps2+a88×Ps+a89
《数28》チラーヘッド(kJ/kg)
=断熱吐出ガスエンタルピ−吸入ガスエンタルピ
本開示は、ターボチラーにおける高効率運転を実現するための運転状態(ヘッド)検出方法、サージ回避制御およびサージ検出制御に関する。
本発明の範囲を理解するうえで、“を備える”という語およびこの派生語は、ここでは、オープンエンドな語を意図しており、記載された特徴、要素、構成、群、整数、及び/又はステップの存在を明示するものであるが、記載されていない特徴、要素、構成、群、整数、及び/又はステップの存在を除外するものではない。上述の内容は、“含む”、“有する”という語およびこの派生語のような、同様な意味を持つ語にも当てはまる。また、“部分”“要素”というような語が単数形で記載された場合、単一の部分という意味と、複数の部分という意味の両方の意味をもちうる。
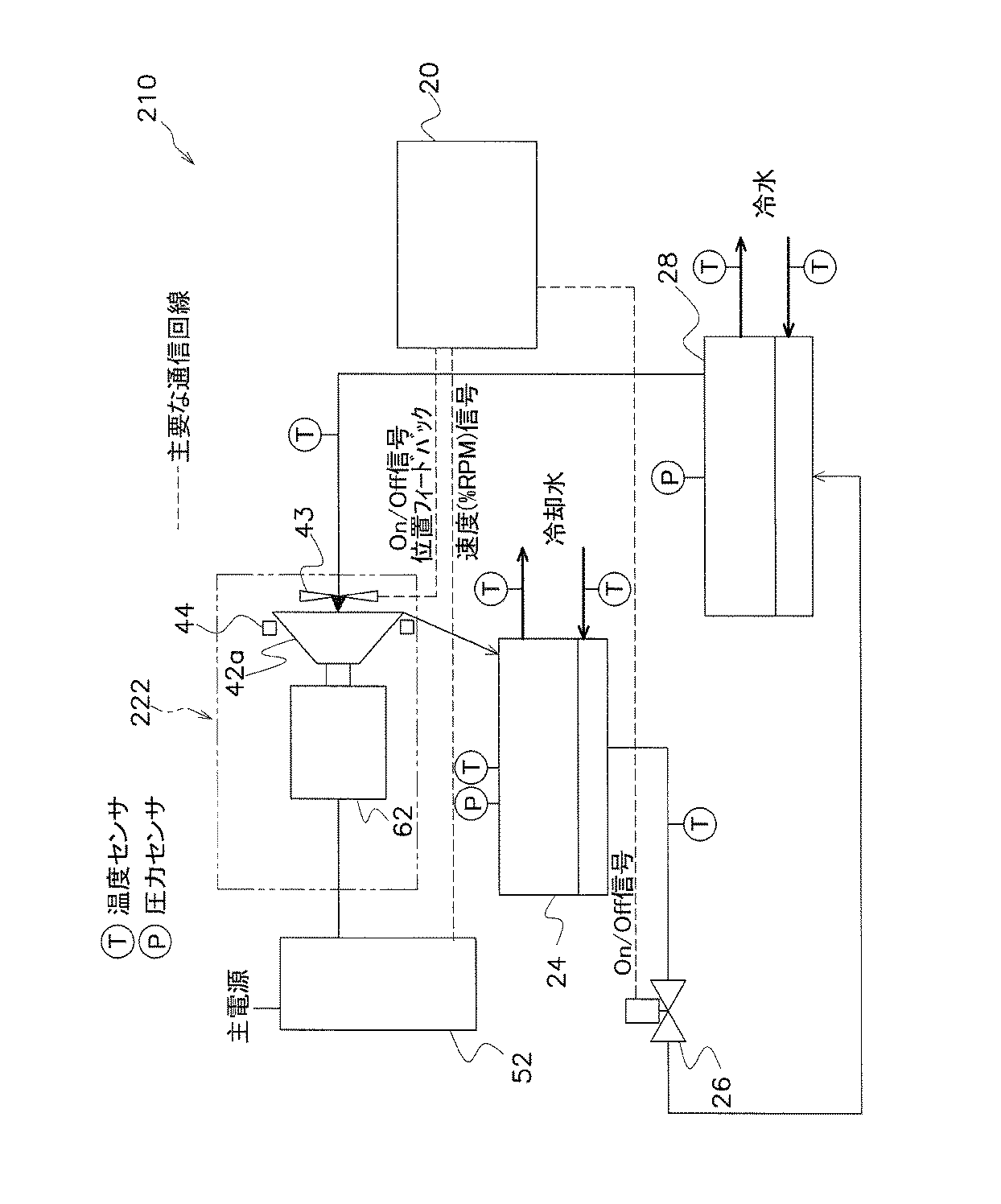
20 チラーコントローラ(制御部、制御装置)
22 単段式の遠心式圧縮機(圧縮機)
222 二段式の遠心式圧縮機(圧縮機)
24 凝縮器
28 蒸発器
43 吸入ガイドベーン(吸入容量制御機構)
44 吐出ディフューザ幅制御機構(吐出容量制御機構)
Claims (12)
- 遠心式の圧縮機と、
開度を変更することで前記圧縮機の容量制御を行う、吸入容量制御機構および吐出容量制御機構と、
圧縮機個別のサージ曲線と断熱ヘッドとを比較した結果に基づき、サージ回避のための前記圧縮機の回転数制御、および、サージ検出に基づく前記圧縮機の緊急停止制御を行う 制御部と、
を備え、
前記サージ曲線は、前記制御部に予め記憶されるものであって、前記圧縮機の現在回転数、前記吸入容量制御機構の開度、および前記吐出容量制御機構の開度により規定され、
前記断熱ヘッドは、運転中の、吸入圧力、吐出圧力、および吸入温度を用いて計算される、冷凍装置であって、
前記吸入圧力および前記吐出圧力は、前記制御部に設定された当該冷凍装置の設置場所の高度を用いて、絶対圧力に換算されたものであり、
冷凍装置。 - 遠心式の圧縮機と、
開度を変更することで前記圧縮機の容量制御を行う、吸入容量制御機構および吐出容量制御機構と、
圧縮機個別のサージ曲線と断熱ヘッドとを比較した結果に基づき、サージ回避のための前記圧縮機の回転数制御、および、サージ検出に基づく前記圧縮機の緊急停止制御を行う 制御部と、
を備え、
前記サージ曲線は、前記制御部に予め記憶されるものであって、前記圧縮機の現在回転数、前記吸入容量制御機構の開度、および前記吐出容量制御機構の開度により規定され、
前記断熱ヘッドは、運転中の、吸入圧力、吐出圧力、および吸入温度を用いて計算される、冷凍装置であって、
当該冷凍装置の凝縮器に設けられた凝縮器圧力センサと、
当該冷凍装置の蒸発器に設けられた蒸発器圧力センサと、
を更に備え、
前記吸入圧力および前記吐出圧力は、各々、前記蒸発器圧力センサおよび前記凝縮器圧力センサの計測値に対し、随時計算される圧縮機風量を基にした前記圧縮機の吸入管および吐出管での圧力ロス分が補正されたものである、
冷凍装置。 - 前記制御部は、前記断熱ヘッドが前記サージ曲線を超えた時間の直近一定時間内における積算が、予め設定された時間を上回った場合にサージ異常と判断し、前記圧縮機を停止させる、
請求項1又は2に記載の冷凍装置。 - 前記圧縮機は2段式であり、
前記断熱ヘッドは、擬似単段エンタルピ基準で表される、
請求項1から3のいずれか1項に記載の冷凍装置。 - 遠心式の圧縮機と、開度を変更することで前記圧縮機の容量制御を行う、吸入容量制御機構および吐出容量制御機構とを有する冷凍機の、制御装置であって、
圧縮機個別のサージ曲線を記憶する記憶部と、
処理部と、
を備え、
前記処理部は、前記記憶部に記憶された前記サージ曲線と断熱ヘッドとを比較した結果 に基づき、サージ回避のための前記圧縮機の回転数制御、および、サージ検出に基づく前記圧縮機の緊急停止制御を行い、
前記サージ曲線は、前記圧縮機の現在回転数、前記吸入容量制御機構の開度、および前記吐出容量制御機構の開度により規定され、
前記断熱ヘッドは、運転中の前記圧縮機の、吸入圧力、吐出圧力、および吸入温度を用いて計算され、
前記吸入圧力および前記吐出圧力は、前記記憶部に記憶された前記冷凍機の設置場所の高度を用いて、絶対圧力に換算されたものである、
制御装置。 - 遠心式の圧縮機と、開度を変更することで前記圧縮機の容量制御を行う、吸入容量制御機構および吐出容量制御機構とを有する冷凍機の、制御装置であって、
圧縮機個別のサージ曲線を記憶する記憶部と、
処理部と、
を備え、
前記処理部は、前記記憶部に記憶された前記サージ曲線と断熱ヘッドとを比較した結果 に基づき、サージ回避のための前記圧縮機の回転数制御、および、サージ検出に基づく前記圧縮機の緊急停止制御を行い、
前記サージ曲線は、前記圧縮機の現在回転数、前記吸入容量制御機構の開度、および前記吐出容量制御機構の開度により規定され、
前記断熱ヘッドは、運転中の前記圧縮機の、吸入圧力、吐出圧力、および吸入温度を用いて計算され、
前記冷凍機は、凝縮器に設けられた凝縮器圧力センサと、蒸発器に設けられた蒸発器圧力センサと、を更に有し、
前記吸入圧力および前記吐出圧力は、各々、前記蒸発器圧力センサおよび前記凝縮器圧力センサの計測値に対し、圧縮機風量を基に随時計算される前記圧縮機の吸入管および吐出管での圧力ロス分が補正されたものである、
制御装置。 - 前記処理部は、前記断熱ヘッドが前記サージ曲線を超えた時間の直近一定時間内における積算が、予め設定された時間を上回った場合にサージ異常と判断し、前記圧縮機を停止させる、
請求項5又は6に記載の制御装置。 - 前記圧縮機は2段式であり、
前記断熱ヘッドは、擬似単段エンタルピ基準で表される、
請求項5から7のいずれか1項に記載の制御装置。 - 遠心式の圧縮機と、
開度を変更することで前記圧縮機の容量制御を行う、吸入容量制御機構および吐出容量 制御機構と、
前記圧縮機の回転数制御、サージ回避のための前記圧縮機の回転数制御、および、サー ジ検出に基づく前記圧縮機の緊急停止制御を行うために、圧縮機個別のサージ曲線と断熱 ヘッドとを比較する制御部と、
を備え、
前記サージ曲線は、前記制御部に予め記憶されるものであって、前記圧縮機の現在回転 数、前記吸入容量制御機構の開度、および前記吐出容量制御機構の開度により規定され、
前記断熱ヘッドは、運転中の、吸入圧力、吐出圧力、および吸入温度を用いて計算され る、冷凍装置であって、
前記吸入圧力および前記吐出圧力は、前記制御部に設定された当該冷凍装置の設置場所 の高度を用いて、絶対圧力に換算されたものであり、
前記制御部は、前記断熱ヘッドが前記サージ曲線を超えた時間の直近一定時間内におけ る積算が、予め設定された時間を上回った場合にサージ異常と判断し、前記圧縮機を停止 させる、
冷凍装置。 - 遠心式の圧縮機と、
開度を変更することで前記圧縮機の容量制御を行う、吸入容量制御機構および吐出容量 制御機構と、
前記圧縮機の回転数制御、サージ回避のための前記圧縮機の回転数制御、および、サー ジ検出に基づく前記圧縮機の緊急停止制御を行うために、圧縮機個別のサージ曲線と断熱 ヘッドとを比較する制御部と、
を備え、
前記サージ曲線は、前記制御部に予め記憶されるものであって、前記圧縮機の現在回転 数、前記吸入容量制御機構の開度、および前記吐出容量制御機構の開度により規定され、
前記断熱ヘッドは、運転中の、吸入圧力、吐出圧力、および吸入温度を用いて計算され る、冷凍装置であって、
当該冷凍装置の凝縮器に設けられた凝縮器圧力センサと、
当該冷凍装置の蒸発器に設けられた蒸発器圧力センサと、
を更に備え、
前記吸入圧力および前記吐出圧力は、各々、前記蒸発器圧力センサおよび前記凝縮器圧 力センサの計測値に対し、随時計算される圧縮機風量を基にした前記圧縮機の吸入管およ び吐出管での圧力ロス分が補正されたものであり、
前記制御部は、前記断熱ヘッドが前記サージ曲線を超えた時間の直近一定時間内におけ る積算が、予め設定された時間を上回った場合にサージ異常と判断し、前記圧縮機を停止 させる、
冷凍装置。 - 遠心式の圧縮機と、開度を変更することで前記圧縮機の容量制御を行う、吸入容量制御 機構および吐出容量制御機構とを有する冷凍機の、制御装置であって、
圧縮機個別のサージ曲線を記憶する記憶部と、
処理部と、
を備え、
前記処理部は、前記圧縮機の回転数制御、サージ回避のための前記圧縮機の回転数制御 、および、サージ検出に基づく前記圧縮機の緊急停止制御を行うために、前記記憶部に記 憶された前記サージ曲線と断熱ヘッドとを比較するものであって、
前記サージ曲線は、前記圧縮機の現在回転数、前記吸入容量制御機構の開度、および前 記吐出容量制御機構の開度により規定され、
前記断熱ヘッドは、運転中の前記圧縮機の、吸入圧力、吐出圧力、および吸入温度を用 いて計算され、
前記吸入圧力および前記吐出圧力は、前記記憶部に記憶された前記冷凍機の設置場所の 高度を用いて、絶対圧力に換算されたものであり、
前記処理部は、前記断熱ヘッドが前記サージ曲線を超えた時間の直近一定時間内におけ る積算が、予め設定された時間を上回った場合にサージ異常と判断し、前記圧縮機を停止 させる、
制御装置。 - 遠心式の圧縮機と、開度を変更することで前記圧縮機の容量制御を行う、吸入容量制御 機構および吐出容量制御機構とを有する冷凍機の、制御装置であって、
圧縮機個別のサージ曲線を記憶する記憶部と、
処理部と、
を備え、
前記処理部は、前記圧縮機の回転数制御、サージ回避のための前記圧縮機の回転数制御 、および、サージ検出に基づく前記圧縮機の緊急停止制御を行うために、前記記憶部に記 憶された前記サージ曲線と断熱ヘッドとを比較するものであって、
前記サージ曲線は、前記圧縮機の現在回転数、前記吸入容量制御機構の開度、および前 記吐出容量制御機構の開度により規定され、
前記断熱ヘッドは、運転中の前記圧縮機の、吸入圧力、吐出圧力、および吸入温度を用 いて計算され、
前記冷凍機は、凝縮器に設けられた凝縮器圧力センサと、蒸発器に設けられた蒸発器圧 力センサと、を更に有し、
前記吸入圧力および前記吐出圧力は、各々、前記蒸発器圧力センサおよび前記凝縮器圧 力センサの計測値に対し、圧縮機風量を基に随時計算される前記圧縮機の吸入管および吐 出管での圧力ロス分が補正されたものであり、
前記処理部は、前記断熱ヘッドが前記サージ曲線を超えた時間の直近一定時間内におけ る積算が、予め設定された時間を上回った場合にサージ異常と判断し、前記圧縮機を停止 させる、
制御装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361798082P | 2013-03-15 | 2013-03-15 | |
| US61/798,082 | 2013-03-15 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014181905A JP2014181905A (ja) | 2014-09-29 |
| JP6533366B2 true JP6533366B2 (ja) | 2019-06-19 |
Family
ID=51521124
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014052691A Active JP6533366B2 (ja) | 2013-03-15 | 2014-03-14 | 冷凍装置および冷凍機の制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10539353B2 (ja) |
| JP (1) | JP6533366B2 (ja) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10544791B2 (en) * | 2011-12-01 | 2020-01-28 | Carrier Corporation | Centrifugal compressor startup control |
| JP6396662B2 (ja) * | 2013-03-15 | 2018-09-26 | ダイキン アプライド アメリカズ インコーポレィティッド | 冷凍装置および冷凍機の制御装置 |
| DE102014111946A1 (de) * | 2014-08-21 | 2016-02-25 | Bitzer Kühlmaschinenbau Gmbh | Verfahren zum Betreiben einer Kälteanlage |
| US9470445B2 (en) | 2014-11-07 | 2016-10-18 | Emerson Climate Technologies, Inc. | Head pressure control |
| CN107735575B (zh) * | 2015-07-06 | 2019-10-18 | 江森自控科技公司 | 用于多级离心压缩机的容量控制系统和方法 |
| US20170174049A1 (en) * | 2015-12-21 | 2017-06-22 | Ford Global Technologies, Llc | Dynamically controlled vapor compression cooling system with centrifugal compressor |
| CN105509411B (zh) * | 2016-01-29 | 2018-02-13 | 合肥美的电冰箱有限公司 | 一种冰箱控制方法系统及冰箱 |
| US10539350B2 (en) | 2016-02-26 | 2020-01-21 | Daikin Applied Americas Inc. | Economizer used in chiller system |
| US20170260987A1 (en) | 2016-03-11 | 2017-09-14 | Daikin Applied Americas Inc. | Centrifugal compressor with casing treatment bypass |
| CN107356012A (zh) | 2016-05-09 | 2017-11-17 | 开利公司 | 热泵系统及其控制方法 |
| CN109219726B (zh) | 2016-06-09 | 2021-04-02 | 三菱电机株式会社 | 制冷循环装置 |
| US20180073779A1 (en) * | 2016-09-15 | 2018-03-15 | Daikin Applied Americas Inc. | Centrifugal compressor |
| US11466911B2 (en) * | 2016-11-30 | 2022-10-11 | Dc Engineering, Inc. | Method and system for improving refrigeration system efficiency |
| GB2571688B (en) * | 2017-02-10 | 2021-02-10 | Mitsubishi Electric Corp | Refrigeration cycle apparatus |
| JP2018173223A (ja) * | 2017-03-31 | 2018-11-08 | 三菱重工サーマルシステムズ株式会社 | 冷凍機、温水ヒートポンプ、運転方法及びプログラム |
| CN110375467B (zh) * | 2018-04-13 | 2022-07-05 | 开利公司 | 用于空气源单制冷系统的制冷剂泄露的检测装置和方法 |
| CN109869956B (zh) * | 2019-03-04 | 2021-01-26 | 荏原冷热系统(中国)有限公司 | 离心机组的经济器阀的控制系统和控制方法 |
| WO2021003080A1 (en) | 2019-07-01 | 2021-01-07 | Carrier Corporation | Surge protection for a multistage compressor |
| JP6844663B2 (ja) * | 2019-07-09 | 2021-03-17 | ダイキン工業株式会社 | 水量調整装置 |
| CN111140544B (zh) * | 2019-12-18 | 2021-09-21 | 珠海格力电器股份有限公司 | 压缩机导叶开度控制方法、装置及空调机组 |
| KR20220050573A (ko) * | 2020-10-16 | 2022-04-25 | 엘지전자 주식회사 | 칠러 시스템 및 그 동작 방법 |
| US11994140B2 (en) * | 2020-12-21 | 2024-05-28 | Copeland Lp | Surge control systems and methods for dynamic compressors |
| US11428233B2 (en) | 2020-12-21 | 2022-08-30 | Emerson Climate Technologies, Inc. | Surge control systems and methods for dynamic compressors |
| JP2024502241A (ja) * | 2020-12-21 | 2024-01-18 | コープランド エルピー | 動圧縮機のサージ制御システム及び方法 |
| US12044245B2 (en) | 2021-04-29 | 2024-07-23 | Copeland Lp | Mass flow interpolation systems and methods for dynamic compressors |
| CN113945029B (zh) * | 2021-10-19 | 2023-04-25 | 青岛海尔空调电子有限公司 | 用于控制冷媒循环系统的方法、装置及冷媒循环系统 |
| CN116357607B (zh) * | 2023-06-02 | 2023-08-22 | 杭州德玛仕气体设备工程有限公司 | 透平压缩机一键起动加载方法 |
Family Cites Families (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3352125A (en) * | 1965-08-16 | 1967-11-14 | Gen Motors Corp | Pressure compensated polyphase expansion valve refrigeration system |
| JPS4868286A (ja) * | 1971-12-17 | 1973-09-18 | ||
| US3962607A (en) * | 1974-06-05 | 1976-06-08 | Dynaco Inc. | Loudspeaker protective system |
| JPS56121898A (en) * | 1980-02-26 | 1981-09-24 | Kawasaki Heavy Ind Ltd | Gas compressor with number-of-revolution control device |
| US4594051A (en) * | 1984-05-14 | 1986-06-10 | Dresser Industries, Inc. | System, apparatus, and method for detecting and controlling surge in a turbo compressor |
| JP2619360B2 (ja) | 1986-02-21 | 1997-06-11 | 株式会社日立製作所 | ターボ圧縮機のサージング防止装置 |
| US4646530A (en) * | 1986-07-02 | 1987-03-03 | Carrier Corporation | Automatic anti-surge control for dual centrifugal compressor system |
| JPH0816479B2 (ja) * | 1987-06-23 | 1996-02-21 | 株式会社日立製作所 | 圧縮機のサ−ジング防止装置 |
| JPH0819919B2 (ja) * | 1990-04-05 | 1996-03-04 | ダイキン工業株式会社 | ターボ冷凍機のサージング発生予測時間表示装置及びサージング予防装置 |
| US5203179A (en) * | 1992-03-04 | 1993-04-20 | Ecoair Corporation | Control system for an air conditioning/refrigeration system |
| US5355691A (en) | 1993-08-16 | 1994-10-18 | American Standard Inc. | Control method and apparatus for a centrifugal chiller using a variable speed impeller motor drive |
| US5746062A (en) | 1996-04-11 | 1998-05-05 | York International Corporation | Methods and apparatuses for detecting surge in centrifugal compressors |
| JPH1151502A (ja) * | 1997-07-30 | 1999-02-26 | Hitachi Ltd | ターボ冷凍機 |
| US5845509A (en) * | 1997-09-26 | 1998-12-08 | Shaw; David N. | Variable speed parallel centrifugal compressors for HVAC and refrigeration systems |
| US6036432A (en) | 1998-07-09 | 2000-03-14 | Carrier Corporation | Method and apparatus for protecting centrifugal compressors from rotating stall vibrations |
| DE10001365A1 (de) * | 2000-01-14 | 2001-07-19 | Man Turbomasch Ag Ghh Borsig | Verfahren und Einrichtung zum Regeln eines Turbokompressors zur Verhinderung des Pumpens |
| DE10012380A1 (de) * | 2000-03-14 | 2001-09-20 | Man Turbomasch Ag Ghh Borsig | Verfahren zum Schutz eines Turbokompressors vor Betrieb im instabilen Arbeitsbereich |
| US6578373B1 (en) * | 2000-09-21 | 2003-06-17 | William J. Barbier | Rate of change detector for refrigerant floodback |
| JP3590033B2 (ja) * | 2002-04-24 | 2004-11-17 | 川崎重工業株式会社 | 流体機械のサージ防止方法 |
| CA2492465C (en) * | 2002-08-06 | 2008-09-30 | York International Corporation | Stability control system and method for centrifugal compressors operating in parallel |
| US7313465B1 (en) * | 2003-09-11 | 2007-12-25 | Dte Energy Technologies, Inc. | System and method for managing energy generation equipment |
| JP4727142B2 (ja) * | 2003-12-18 | 2011-07-20 | 三菱重工業株式会社 | ターボ冷凍機およびその圧縮機ならびにその制御方法 |
| US7293954B2 (en) * | 2004-12-30 | 2007-11-13 | Mitsubishi Heavy Industries, Ltd. | Centrifugal compressor for turbo chiller, turbo chiller, and control method therefor |
| JP5141272B2 (ja) * | 2008-02-01 | 2013-02-13 | ダイキン工業株式会社 | ターボ冷凍機 |
| US10012403B2 (en) * | 2009-05-21 | 2018-07-03 | Lennox Industries Inc. | Wiring connector housing |
| EP2322877A3 (en) * | 2009-10-20 | 2015-05-27 | Johnson Controls Technology Company | Controllers and methods for providing computerized generation and use of a three dimensional surge map for control of chillers |
| JP5709844B2 (ja) * | 2010-03-29 | 2015-04-30 | 三菱電機株式会社 | 空気調和装置 |
| IT1401663B1 (it) * | 2010-08-31 | 2013-08-02 | Nuovo Pignone Spa | Dispositivo e metodo per rilevare una sovracorrente in un compressore e spostare un margine di sovracorrente. |
| WO2012077187A1 (ja) * | 2010-12-07 | 2012-06-14 | 日立オートモティブシステムズ株式会社 | 電力変換装置 |
| US10544791B2 (en) * | 2011-12-01 | 2020-01-28 | Carrier Corporation | Centrifugal compressor startup control |
| US9810462B2 (en) * | 2011-12-21 | 2017-11-07 | Lennox Industries Inc. | Dehumidification using intermittent ventilation |
| WO2013181574A1 (en) * | 2012-05-31 | 2013-12-05 | Doubleday Acquisitions Llc | Automatic shutdown systems for refrigerated cargo containers |
| JP2014043795A (ja) * | 2012-08-24 | 2014-03-13 | Hitachi Ltd | サージ発生防止装置およびこれを搭載する圧縮機 |
| EP2925989A4 (en) * | 2012-11-28 | 2016-10-12 | Thermo King Corp | METHODS AND SYSTEMS FOR CONTROLLING THE ENGINE OF A REFRIGERATION GROUP OF TRANSPORT |
| US20140316675A1 (en) * | 2013-04-18 | 2014-10-23 | Ford Global Technologies, Llc | Preserving combustion stability during compressor-surge conditions |
| JP6235369B2 (ja) * | 2014-02-19 | 2017-11-22 | 株式会社日立製作所 | 流体機械 |
| CN104864620B (zh) * | 2014-02-26 | 2019-01-01 | 荏原冷热系统株式会社 | 离心式制冷机 |
-
2014
- 2014-03-14 US US14/211,530 patent/US10539353B2/en active Active
- 2014-03-14 JP JP2014052691A patent/JP6533366B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10539353B2 (en) | 2020-01-21 |
| US20140260388A1 (en) | 2014-09-18 |
| JP2014181905A (ja) | 2014-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6533366B2 (ja) | 冷凍装置および冷凍機の制御装置 | |
| JP6396662B2 (ja) | 冷凍装置および冷凍機の制御装置 | |
| CN104964498B (zh) | 制冷系统的电子膨胀阀控制方法及制冷系统 | |
| US9989943B2 (en) | HVAC systems and controls | |
| US9683563B2 (en) | Vibration protection in a variable speed compressor | |
| CN104964496B (zh) | 用于监测压缩机过热的系统和方法 | |
| CN110895020B (zh) | 一种制冷剂泄漏检测方法及空调器 | |
| US9115921B2 (en) | Performance evaluation device for variable-speed centrifugal chiller | |
| CN106196787B (zh) | 热泵系统的控制方法及热泵系统 | |
| CN107504732B (zh) | 一种制冷系统制冷剂多少的判定方法及判定装置 | |
| JP5244420B2 (ja) | ターボ冷凍機および熱源システムならびにこれらの制御方法 | |
| US9541318B2 (en) | Estimation apparatus of heat transfer medium flow rate, heat source machine, and estimation method of heat transfer medium flow rate | |
| JP6436785B2 (ja) | 空気調和装置 | |
| CN109631380B (zh) | 空调室外机组及空调器 | |
| WO2006073814A2 (en) | Method and control for determining low refrigerant charge | |
| CN109869955A (zh) | 制冷系统排气温度传感器脱落检测方法及系统 | |
| JP2011226704A (ja) | 冷凍空調装置並びに冷凍空調システム | |
| CN107631527B (zh) | 检测变频制冷设备是否缺少冷媒的方法及系统 | |
| CN110529974A (zh) | 空调器的冷媒泄露检测方法、冷媒泄露检测装置及空调器 | |
| EP2764303B1 (en) | Method for controlling gas pressure in cooling plant | |
| JP6529747B2 (ja) | 空気調和機 | |
| JP2010151372A (ja) | 冷凍装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170210 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20170704 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20170705 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20170926 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180117 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180123 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180410 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180911 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190514 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190524 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6533366 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |