JP6479570B2 - 作業工具 - Google Patents
作業工具 Download PDFInfo
- Publication number
- JP6479570B2 JP6479570B2 JP2015101949A JP2015101949A JP6479570B2 JP 6479570 B2 JP6479570 B2 JP 6479570B2 JP 2015101949 A JP2015101949 A JP 2015101949A JP 2015101949 A JP2015101949 A JP 2015101949A JP 6479570 B2 JP6479570 B2 JP 6479570B2
- Authority
- JP
- Japan
- Prior art keywords
- region
- meson
- swing mechanism
- rotating shaft
- present
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25F—COMBINATION OR MULTI-PURPOSE TOOLS NOT OTHERWISE PROVIDED FOR; DETAILS OR COMPONENTS OF PORTABLE POWER-DRIVEN TOOLS NOT PARTICULARLY RELATED TO THE OPERATIONS PERFORMED AND NOT OTHERWISE PROVIDED FOR
- B25F5/00—Details or components of portable power-driven tools not particularly related to the operations performed and not otherwise provided for
- B25F5/006—Vibration damping means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D17/00—Details of, or accessories for, portable power-driven percussive tools
- B25D17/24—Damping the reaction force
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D11/00—Portable percussive tools with electromotor or other motor drive
- B25D11/06—Means for driving the impulse member
- B25D11/062—Means for driving the impulse member comprising a wobbling mechanism, swash plate
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D17/00—Details of, or accessories for, portable power-driven percussive tools
- B25D17/06—Hammer pistons; Anvils ; Guide-sleeves for pistons
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25F—COMBINATION OR MULTI-PURPOSE TOOLS NOT OTHERWISE PROVIDED FOR; DETAILS OR COMPONENTS OF PORTABLE POWER-DRIVEN TOOLS NOT PARTICULARLY RELATED TO THE OPERATIONS PERFORMED AND NOT OTHERWISE PROVIDED FOR
- B25F5/00—Details or components of portable power-driven tools not particularly related to the operations performed and not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D2217/00—Details of, or accessories for, portable power-driven percussive tools
- B25D2217/0011—Details of anvils, guide-sleeves or pistons
- B25D2217/0019—Guide-sleeves
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D2250/00—General details of portable percussive tools; Components used in portable percussive tools
- B25D2250/371—Use of springs
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Percussive Tools And Related Accessories (AREA)
Description
上述した構成により、作業工具は、シリンダの往復移動により生ずる空気室内の圧力変動を介して打撃子を中間子に衝突させ、さらに中間子を先端工具に衝突させることにより先端工具を直線状に移動する。
第1補償機構は、揺動機構を、第1側に位置する揺動機構基準位置と、第2側に位置する揺動機構移動位置との間で往復移動可能に構成する。さらに、第1補償機構は、揺動機構が揺動機構移動位置に置かれた場合に、揺動機構を揺動機構基準位置に置くよう揺動機構を付勢する第1付勢部材を有する。すなわち、第1補償機構は揺動機構を回動軸に往復摺動可能に構成する。なお、揺動機構の往復摺動動作に連動して、シリンダが往復摺動される。
第2補償機構は、中間子を、第1側に位置する中間子基準位置と、第2側に位置する中間子移動位置との間で往復移動可能に構成する。なお、中間子基準位置は、中間子が打撃子に衝突される位置により規定される。さらに、第2補償機構は、中間子が中間子移動位置に置かれた場合に、中間子を中間子基準位置に置くよう中間子を付勢する第2付勢部材を有する。
また、揺動機構の移動動作に基づきシリンダが第2側へ移動されることによって空気室の容積が拡大される。なお、空気室の容積拡大は、シリンダの往復移動を円滑にするために形成された空気穴からシリンダ内に空気が流入することにより発生する。
第1補償機構が空気室の容積を拡大した状態において、第2補償機構が、先端工具による所定の加工作業の反力により中間子を中間子基準位置から中間子移動位置へ移動し、当該中間子の移動動作に基づき打撃子を第2側に移動することによって空気室の容積が補償される。長手方向において、揺動機構基準位置と揺動機構移動位置の間の距離と、中間子基準位置と中間子移動位置の間の距離は同一となるよう構成される。
なお、連続した加工作業においては、揺動機構の揺動動作に伴って空気室のエアが再度圧縮される。容積補償を行わないままに当該エアの圧縮を行った場合には、前回の圧縮比とは異なる圧縮比にてエアが圧縮されることとなるため、先端工具の駆動状態が異なるものとなる。本発明に係る作業工具によれば、第1補償機構の動作により生ずる空気室の容積の変化を第2補償機構により補償することができる。したがって、振動抑制と打撃子の不安定駆動要素の低減化が図られた作業工具を得ることが可能となる。
また、第2補償機構は、第2付勢部材により、中間子移動位置に移動された中間子を中間子基準位置に復帰させる。この結果、中間子は先端工具側に配置されるため、打撃子に衝突されることにより得られたエネルギーをより効率的に先端工具へ伝達することが可能となる。
なお、先端工具を直線状に駆動する作業工具として、コンクリートなどの被加工材に対し粉砕作業を行う電動ハンマまたは電動ハンマドリルや、木材などの被加工材に対し切断作業を行う電動レシプロソーなどが挙げられる。
本形態に係る作業工具によれば、第2軸受部材の外側領域に第1付勢部材の少なくとも1部の領域を配置することができる。よって、回転軸部材に第1付勢部材を配置する必要が無くなるため、回転軸部材の延在長さを短縮化することが可能となる。この意味において、回転軸部材は、第1付勢部材の非配置領域を有するということができる。
本形態に係る作業工具によれば、被動ギア部材の外側領域に第1付勢部材の少なくとも1部の領域を配置することができる。よって、被動ギア部材に第1付勢部材を配置する必要が無くなるため、回転軸部材の延在長さを短縮化することが可能となる。この意味において、被動ギア部材は、第1付勢部材の非配置領域を有するということができる。
本形態に係る作業工具によれば、回転軸部材に対する被動ギア部材の長手方向延在部と、弾性要素とを交差方向において重ねることにより、回転軸部材の延在長さを短縮できるとともに、支持部材により効率的に弾性要素の付勢力を揺動機構に伝達することが可能となる。
本形態に係る作業工具によれば、被動ギア部材の周辺領域における本体部内の所定領域に複数のコイルスプリングを配置することが可能となるため、本体部内のスペースを有効的に利用することができる。この結果、作業工具の小型化を図ることが可能となる。
本形態に係る作業工具によれば、駆動モータの第1回転軸と、回転軸部材の第2回転軸とが交差する配置形態であるため、当該第1回転軸と第2回転軸が平行である作業工具に比して駆動モータの大型化を図ることが可能となる。すなわち、いわゆる高出力タイプの作業工具であっても、振動抑制と打撃子の不安定駆動要素の低減化を図ることが可能な構成を得ることが可能となる。
本形態に係る作業工具によれば、コニカルスプリングを回転軸部材の周辺領域に効率的に配置することができるため、作業工具の小型化を図ることが可能となる。
より具体的には、中間子は、第1領域として第2領域よりも直径の大きい大径領域と、第2領域としての小径領域を有することができる。さらに、大径領域と小径領域との境界に設けられる段差領域を中間領域とすることができる。当該構成にあっては、被覆部材は大径領域と、段差領域と、少なくとも一部の小径領域とを被覆することができる。なお、被覆部材に被覆されない小径領域は、被覆部材孔部から延出される。
本形態に係る作業工具によれば、コイルスプリングにより中間子を第1側へ付勢することができる。この結果、第2側へ移動された中間子を速やかに第1側へと移動させることが可能となる。よって、連続した加工作業を効率的に遂行することが可能となる。
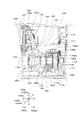
図1は、ハンマドリル100の概要を説明するための断面図である。図1に示す通り、ハンマドリル100は、使用者に把持されるハンドグリップ109を有する手持ち式の作業工具である。ハンマドリル100は、工具ビット119を当該工具ビット119の長手方向に直線状に駆動させて被加工材に対して打撃作業を行う打撃動作や、工具ビット119を当該長手方向周りに回転駆動させて被加工材に対して穴あけ作業を行う回転動作を行うために構成される。ハンマドリル100における工具ビット119の駆動形態を適宜選択するために、使用者はモードチェンジレバー(図示せず)によって工具ビット119の駆動モードを設定することができる。本実施形態に係るハンマドリル100は、工具ビット119に打撃動作および回転動作を行わせるハンマドリルモードと、工具ビット119に回転動作のみを行わせるドリルモードとを有する。このハンマドリル100が本発明に係る「作業工具」の一例であり、工具ビット119が本発明に係る「先端工具」の一例である。
図1に示す通り、ハンマドリル100の本体ハウジング101は、ハンマドリル100の外郭を構成するギアハウジング105とモータハウジング103と、内部機構を配置するインナーハウジング130とを有する。また、本体ハウジング101は、使用者に把持されるハンドグリップ109を有する。この本体ハウジング101が本発明に係る「本体部」の一例である。
図1に示す通り、ハンドグリップ109は、駆動モータ110を通電するためのトリガ109aと、駆動モータ110に電流を供給するための電源ケーブル109bとを有する。使用者がハンドグリップ109を把持してトリガ109aを操作することにより、電源ケーブル109bを通じて駆動モータ110へと電流が供給され、工具ビット119が所定の駆動モードにより駆動される。この駆動モータ110が本発明に係る「駆動モータ」の一例である。
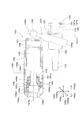
図1に示す通り、ツールホルダ159は工具ビット119を着脱自在とするために構成されとともに、本体ハウジング101に対し回転自在に配置される。このツールホルダ159が本発明に係る「ツールホルダ」の一例である。なお、図2に示す通り、ツールホルダ159には、ピストン収容領域159aと、インパクトボルト収容領域159bと、工具ビット収容領域159cとが形成されるとともに、後述する第2補償機構190が収容される。
次に本体ハウジング101の内部において工具ビット119を駆動する工具ビット駆動機構の構成を説明する。
図1に示す通り工具ビット駆動機構は、工具ビット119を直線状に駆動するための打撃機構120と、工具ビット119を回転駆動するための回転伝達機構150とを主体として構成される。打撃機構120と回転伝達機構150は、中間軸部116の回転動作に基づき駆動される。図2に示す通り、中間軸部116は、駆動モータ110のピニオンギア113と係合する被動ギア部材117により回転され、回転軸116cを規定する。
図3に示す通り、被動ギア部材117は、ギア歯117aと、中間軸部116に圧入される長手方向延在部117bとを有する。被動ギア部材117におけるギア歯117aが形成される領域は、ベアリング116bの外径に圧入される。なお、インナーハウジング130はピン部材115を有する。ピン部材115は、インナーハウジング130に圧入される領域と、ベアリング116bの内径に圧入される領域とを有する。
当該構成によって、図1に示す通り、中間軸部116の前側領域はギアハウジング105に配置されたベアリング116aに支持され、後側領域はベアリング116bにより支持される。
この中間軸部116が本発明に係る「回転軸部材」の一例であり、回転軸116cが本発明に係る「第2回転軸」の一例であり、被動ギア部材117が本発明に係る「被動ギア部材」の一例であり、ギア歯が本発明に係る「ギア歯」の一例であり、長手方向延在部117bが本発明に係る「長手方向延在部」の一例であり、ベアリング116aが本発明に係る「第1軸受部材」の一例であり、ベアリング116bが本発明に係る「第2軸受部材」の一例である。
図2に示す通り、回転伝達機構150は、中間軸部116と一体化された第1ギア151と噛み合う第2ギア153を有する。第2ギア153は、ツールホルダ159のピストン収容領域159aと一体化されている。当該構成によって、中間軸部116の回転動作が、第1ギア151、第2ギア153およびツールホルダ159に伝達されるため、工具ビット119を回転駆動することができる。
図2に示す通り、打撃機構120は、揺動機構121と、打撃要素140とを有する。この打撃機構120が本発明に係る「打撃機構」の一例であり、揺動機構121が本発明に係る「揺動機構」の一例である。
図2に示す通り揺動機構121は、回転体123と、揺動軸部125とを主体にして構成される。回転体123は、中間軸部116に対し回動自在に構成される。回転体123は、回転軸116cに対して所定の傾斜角度を有する外周面123bを有する。揺動軸部125は、回転体123の外周面123bに対し複数のスチールボール123cを介して取付けられるとともに回転体123の周囲を包囲する環状部125aと、環状部125aから上方へ突出して設けられるとともにジョイントピン126を介してピストン127と連結される軸部125bとを有する。当該構成によって、回転体123の回転に伴う外周面123bの傾斜角度の移行に環状部125aが追随することにより、軸部125bが回転軸116cに沿った前後方向にて揺動される。この軸部125bの揺動動作における直線運動成分によって、ピストン127が直線状に往復移動される。
なお、揺動機構121は、後述する第1補償機構180により付勢されるとともに、中間軸部116に対して直線状に往復移動可能に構成されている。また、揺動機構121とピストン127が連結されているため、揺動機構121の往復移動に伴いピストン127も往復移動される。
図2に示す通り、ピストン127の底部と、ストライカ143との間には空気室128が形成されており、ストライカ143はピストン127が往復運動することに伴う空気室128内の圧力変動により直線状に駆動される。この空気室128が本発明に係る「空気室」の一例である。
なお、交差方向100bは、長手方向100aと交差する全ての方向を示す概念である。図1に示す通り、交差方向100bの内、ハンドグリップ109の延在方向成分を有するとともに長手方向100aと直交する方向を高さ方向100baと規定し、長手方向100aと高さ方向100baの双方に直交する方向を幅方向100bbと規定する。高さ方向100baにおいて、ハンドグリップ109が延在する方向を下側と規定し、当該下側とは反対の方向を上側と規定する。また、幅方向100bbにおいて、一方の方向を幅方向一方側と規定し、当該幅方向一方側とは反対の方向を幅方向他方側と規定する。
モードチェンジレバーがハンマドリルモードを選択した場合は、クラッチカム160が後側100a2に移動され、クラッチカム160のクラッチ歯160aと回転体123のクラッチ歯123aが噛み合う。よってこの場合は、ツールホルダ159が回転駆動されるとともに回転体123が回転されるため、工具ビット119は打撃動作と回転動作を同時に行うことが可能となる。
一方、モードチェンジレバーがドリルモードを選択した場合は、クラッチカム160が前側100a1に移動され、クラッチ歯160aおよびクラッチ歯123aの噛み合いが解除される。よってこの場合は、ツールホルダ159が回転駆動される一方で、中間軸部116の回転が回転体123に伝達されずピストン127が駆動されないため、工具ビット119は回転動作のみを行うことが可能となる。なお、図1および図2は、ハンマドリルモードが選択された状態を示している。
次に、図3〜図7に基づき容積補償機構170の説明を行う。容積補償機構170は、図3〜図6に示される第1補償機構180と、図7に示される第2補償機構190により構成される。この容積補償機構170が本発明に係る「容積補償機構」の一例であり、第1補償機構180が本発明に係る「第1補償機構」の一例であり、第2補償機構190が本発明に係る「第2補償機構」の一例である。
図11に示す通り、第1補償機構180は、揺動機構121を、前側100a1に位置する揺動機構基準位置1211と、後側100a2に位置する揺動機構移動位置1212との間で往復移動可能に構成する。さらに、第1補償機構180は、揺動機構121が揺動機構移動位置1212に置かれた場合に、揺動機構121を揺動機構基準位置1211に復帰するよう構成される。この揺動機構基準位置1211が本発明に係る「揺動機構基準位置」の一例であり、揺動機構移動位置1212が本発明に係る「揺動機構移動位置」の一例である。
図3に示す通り、第1補償機構180は、揺動機構121とインナーハウジング130との間に配置されるとともに、図5に示す通り、支持部材182と第1付勢部材181を有する。この支持部材182が本発明に係る「支持部材」の一例であり、第1付勢部材181が本発明に係る「第1付勢部材」の一例である。なお、図5は図1におけるII−II線断面図である。
なお、幅方向100bbにおいて、中間軸部116の回転軸116cと一対のコイルスプリング181bにおけるそれぞれの伸縮軸とは同一直線状に配置される。当該構成によって、一対のコイルスプリング181bは支持部材182を介して効率的に揺動機構121およびピストン127を前側100a1に付勢することができる。
当該構成によれば、中間軸部116の延在長さを短縮化することができる。これを換言すると、第1補償機構180を配置するために必要な中間軸部116の長尺化を抑制することができるということができ、さらに、中間軸部116の延在長さの有効活用を図ることができるということができる。
図11に示す通り、第2補償機構190は、インパクトボルト145を前側100a1に位置するインパクトボルト基準位置1451と、後側100a2に位置するインパクトボルト移動位置1452との間で往復移動可能に構成する。なお、インパクトボルト基準位置1451は、インパクトボルト145がストライカ143に衝突される位置である。さらに、第2補償機構190は、インパクトボルト145がインパクトボルト移動位置1452に置かれた場合に、インパクトボルト145をインパクトボルト基準位置1451に復帰するよう構成される。このインパクトボルト基準位置1451が本発明に係る「中間子基準位置」の一例であり、インパクトボルト移動位置1452が本発明に係る「中間子移動位置」の一例である。
第2補償機構190は、コイルスプリング191aにより構成される第2付勢部材191と、第2付勢部材191を収容する被覆部材192とを有する。このコイルスプリング191aが本発明に係る「コイルスプリング」の一例であり、第2付勢部材191が本発明に係る「第2付勢部材」の一例であり、被覆部材192が本発明に係る「被覆部材」の一例である。
次に、図8〜図11に基づき容積補償機構170の動作につき説明する。容積補償機構170は、工具ビット119が直線状の駆動動作を行う場合に機能を発現する。すなわち、図8〜図11は、ハンマドリル100がハンマドリルモードに設定されている場合の動作を示す。なお、ハンマドリル100においては、使用者が工具ビット119を加工対象に押し付けて使用される。よって、インパクトボルト145は工具ビット119に押され後側100a2に移動される。この状態のインパクトボルト145の位置が、インパクトボルト基準位置1451を規定する。
当該状態に引き続き、軸部125bはさらに前側100a1へ揺動する。なお、揺動機構移動位置1212に置かれた揺動機構121は、コイルスプリング181bに付勢されて揺動機構基準位置1211へ移動される。当該揺動機構121の移動に伴い、ピストン127が前側100a1に移動される。
なお、長手方向100aにおける揺動機構基準位置1211と揺動機構移動位置1212の間の距離と、長手方向100aにおけるインパクトボルト基準位置1451とインパクトボルト移動位置1452の間の距離は同一とされる。
次に、図12および図13に基づき、本発明の第2実施形態に係るハンマドリル200の説明を行う。第2実施形態のハンマドリル200は、第1実施形態のハンマドリル100と比して主に駆動モータ110と中間軸部116の配置形態と、第1補償機構180の構成が異なる。なお、ハンマドリル200の説明において、ハンマドリル100と同等の機能を奏する構成および部品については、同一の図面番号を付してその説明を省略する。このハンマドリル200が本発明に係る「作業工具」の一例である。
なお、ハンドグリップ109は環状に形成されるとともに、ハンドグリップ109の下側にはバッテリ109dを装着するためのバッテリ装着部109cが設けられる。
(態様1)
前記支持部材は、板状部と、板状部と一体化されるフランジリング部とを有し、
前記フランジリング部は前記板状部と比して耐摩耗性を有するとともに、前記揺動機構に直接的に当接する領域と、前記支持部材孔部を形成する領域とを有することを特徴とする。
(態様2)
前記第1付勢部材配置領域は、前記第2側から前記第1側に突出するガイド部を有し、前記支持部材と前記弾性要素は、前記ガイド部に配置されることを特徴とする。
(態様3)
前記交差方向において、前記中間軸部の前記回転軸と複数の前記コイルスプリングにおけるそれぞれの伸縮軸とは同一直線状に配置されることを特徴とする。
(態様4)
前記長手方向における前記揺動機構基準位置と前記揺動機構移動位置の間の距離と、前記長手方向における前記中間子基準位置と前記中間子移動位置の間の距離は同一に構成されることを特徴とする。
本実施形態の各構成要素と本発明の各構成要素の対応関係を以下の通りである。なお、本実施形態は、本発明を実施するための形態の一例を示すものであり、本発明は、本実施形態の構成に限定されるものではない。
ハンマドリル100またはハンマドリル200は本発明に係る「作業工具」の一例である。工具ビット119は本発明に係る「先端工具」の一例である。本体ハウジング101は本発明に係る「本体部」の一例である。駆動モータ110は本発明に係る「駆動モータ」の一例である。出力軸部111は本発明に係る「出力軸部」の一例である。ピニオンギア113は本発明に係る「出力ギア」の一例である。回転軸110aは本発明に係る「第1回転軸」の一例である。中間軸部116は本発明に係る「回転軸部材」の一例である。回転軸116cは本発明に係る「第2回転軸」の一例である。被動ギア部材117または被動ギア部材118は本発明に係る「被動ギア部材」の一例である。ギア歯117aは本発明に係る「ギア歯」の一例である。長手方向延在部117bは本発明に係る「長手方向延在部」の一例である。ベアリング116aは本発明に係る「第1軸受部材」の一例である。ベアリング116bは本発明に係る「第2軸受部材」の一例である。打撃機構120は本発明に係る「打撃機構」の一例である。揺動機構121は本発明に係る「揺動機構」の一例である。ピストン127は本発明に係る「シリンダ」の一例である。ストライカ143は本発明に係る「打撃子」の一例である。インパクトボルト145は本発明に係る「中間子」の一例である。空気室128は本発明に係る「空気室」の一例である。ピストン移動軸127aは本発明に係る「シリンダ移動軸」の一例である。長手方向100aは本発明に係る「長手方向」の一例である。交差方向100bは本発明に係る「交差方向」の一例である。前側100a1は本発明に係る「第1側」の一例である。後側100a2は本発明に係る「第2側」の一例である。容積補償機構170は本発明に係る「容積補償機構」の一例である。第1補償機構180は本発明に係る「第1補償機構」の一例である。第2補償機構190は本発明に係る「第2補償機構」の一例である。揺動機構基準位置1211は本発明に係る「揺動機構基準位置」の一例である。揺動機構移動位置1212は本発明に係る「揺動機構移動位置」の一例である。支持部材182は本発明に係る「支持部材」の一例である。第1付勢部材181は本発明に係る「第1付勢部材」の一例である。前側領域182aは本発明に係る「揺動機構側領域」の一例である。後側領域182bは本発明に係る「弾性要素側領域」の一例である。孔部182cは本発明に係る「支持部材孔部」の一例である。弾性要素181aは本発明に係る「弾性要素」の一例である。コイルスプリング181bは本発明に係る「コイルスプリング」の一例である。配置領域130aは本発明に係る「第1付勢部材配置領域」の一例である。インパクトボルト基準位置1451は本発明に係る「中間子基準位置」の一例である。インパクトボルト移動位置1452は本発明に係る「中間子移動位置」の一例である。コイルスプリング191aは本発明に係る「コイルスプリング」の一例である。第2付勢部材191は本発明に係る「第2付勢部材」の一例である。被覆部材192は本発明に係る「被覆部材」の一例である。前側端部145aは本発明に係る「第1端部」の一例である。大径領域145a1は本発明に係る「第1領域」の一例である。後側端部145bは本発明に係る「第2端部」の一例である。小径領域145b1は本発明に係る「第2領域」の一例である。段差領域145cは本発明に係る「中間領域」の一例である。長手方向壁部192aは本発明に係る「長手方向壁部」の一例である。交差方向壁部192bは本発明に係る「交差方向壁部」の一例である。孔部192cは本発明に係る「被覆部材孔部」の一例である。べべルギア118aは本発明に係る「べべルギア」の一例である。交差方向延在部118bは本発明に係る「交差方向延在部」の一例である。コニカルスプリング181cは本発明に係る「コニカルスプリング」の一例である。大径部181dは本発明に係る「大径部」の一例である。小径部181eは本発明に係る「小径部」の一例である。
100a 長手方向
100a1 前側(第1側)
100a2 後側(第2側)
100b 交差方向
100ba 高さ方向
100bb 幅方向(交差方向)
101 本体ハウジング(本体部)
103 モータハウジング
105 ギアハウジング
109 ハンドグリップ
109a トリガ
109b 電源ケーブル
109c バッテリ装着部
109d バッテリ
110 駆動モータ
110a 回転軸(第1回転軸)
111 出力軸部
111a ベアリング
111b ベアリング
112 ファン
113 ピニオンギア(出力ギア)
115 ピン部材
116 中間軸部(回転軸部材)
116a ベアリング(第1軸受部材)
116b ベアリング(第2軸受部材)
116c 回転軸
117 被動ギア部材
117a ギア歯
117b 長手方向延在部
118 被動ギア部材
118a べべルギア
118b 交差方向延在部
118c ギア歯
119 工具ビット(先端工具)
120 打撃機構
121 揺動機構
1211 揺動機構基準位置
1212 揺動機構移動位置
123 回転体
123a クラッチ歯
123b 外周面
123c スチールボール
125 揺動軸部
125a 環状部
125b 軸部
126 ジョイントピン
127 ピストン(シリンダ)
127a ピストン移動軸(シリンダ移動軸)
128 空気室
130 インナーハウジング
130a 配置領域(第1付勢部材配置領域)
130b ガイド部
130c ネジ
130d ワッシャ
140 打撃要素
143 ストライカ(打撃子)
145 インパクトボルト(中間子)
145a 前側端部(第1端部)
145a1 大径領域(第1領域)
145b 後側端部(第2端部)
145b1 小径領域(第2領域)
145c 段差領域(中間領域)
1451 インバクトボルト基準位置
1452 インパクトボルト移動位置
150 回転伝達機構
151 第1ギア
153 第2ギア
159 ツールホルダ
159a ピストン収容領域
159b インパクトボルト収容領域
159c 工具ビット収容領域
160 クラッチカム
160a クラッチ歯
170 容積補償機構
180 第1補償機構
181 第1付勢部材
181a 弾性要素
181b コイルスプリング
181c コニカルスプリング
181d 大径部
181e 小径部
182 支持部材
182a 前側領域(揺動機構側領域)
182b 後側領域(弾性要素側領域)
182c 孔部(支持部材孔部)
182d 板状部
182e フランジリング部
183 リング状部材
190 第2補償機構
191 第2付勢部材
191a コイルスプリング
192 被覆部材
192a 長手方向壁部
192b 交差方向壁部
192c 孔部(被覆部材孔部)
192d リング状部材
Claims (8)
- 先端工具を直線状に移動することにより被加工材に所定の加工作業を行う作業工具であって、
本体部を有し、
前記本体部は、
前記先端工具を保持するツールホルダと、
駆動モータと、
前記駆動モータにより回転駆動される回転軸部材と、
前記回転軸部材の回転動作に基づき前記先端工具を直線状に駆動する打撃機構と、を収容し、
前記打撃機構は、
直線状に往復移動可能に構成されたシリンダと、
前記シリンダに収容されるとともに前記シリンダ内において直線状に往復移動可能に構成された打撃子と、
前記打撃子と前記シリンダで形成される空気室と、
前記シリンダに連結されるとともに、前記回転軸部材の回転動作に基づく揺動動作により、前記シリンダを往復移動させる揺動機構と、
前記ツールホルダに収容されるとともに直線状に往復移動可能に構成された中間子と、を有し、
前記シリンダの往復移動により生ずる前記空気室内の圧力変動を介して前記打撃子を前記中間子に衝突させ、さらに前記中間子を前記先端工具に衝突させることにより前記先端工具を直線状に移動するよう構成され、
前記作業工具はさらに、
シリンダ移動軸と平行である長手方向と、前記長手方向と交差する方向である交差方向とを規定し、
前記長手方向は、前記シリンダが空気室のエアを圧縮する方向である第1側と、前記第1側とは反対側の方向である第2側とを規定し、
前記本体部はさらに、前記空気室の容積を補償する容積補償機構を収容し、
前記容積補償機構は、第1補償機構と、第2補償機構とを有し、
前記第1補償機構は、前記揺動機構を、前記第1側に位置する揺動機構基準位置と、前記第2側に位置する揺動機構移動位置との間で往復移動可能に構成するとともに、前記揺動機構が前記揺動機構移動位置に置かれた場合に、前記揺動機構を前記揺動機構基準位置に置くよう前記揺動機構を付勢する第1付勢部材を有し、
前記第2補償機構は、前記中間子を、前記第1側に位置する中間子基準位置と、前記第2側に位置する中間子移動位置との間で往復移動可能に構成するとともに、前記中間子が前記中間子移動位置に置かれた場合に、前記中間子を前記中間子基準位置に置くよう前記中間子を付勢する第2付勢部材を有し、
前記容積補償機構は、さらに、
前記第1補償機構が、前記シリンダの前記第2側から前記第1側への移動動作に伴う反力により前記揺動機構を前記揺動機構基準位置から前記揺動機構移動位置へ移動し、当該揺動機構の移動動作に基づき前記シリンダを前記第2側へ移動することによって前記空気室の容積を拡大するとともに、
前記第1補償機構が前記空気室の容積を拡大した状態において、前記第2補償機構が、前記先端工具による前記所定の加工作業の反力により前記中間子を前記中間子基準位置から前記中間子移動位置へ移動し、当該中間子の移動動作に基づき前記打撃子を前記第2側に移動することによって前記空気室の容積を補償するよう構成されており、
前記長手方向において、前記揺動機構基準位置と前記揺動機構移動位置の間の距離と、前記中間子基準位置と前記中間子移動位置の間の距離は同一となるよう構成されることを特徴とする作業工具。 - 請求項1に記載された作業工具であって、
前記回転軸部材は、前記長手方向に延在され、
前記本体部は、前記回転軸部材の前記第1側の所定領域を支持する第1軸受部材と、前記回転軸部材の前記第2側の所定領域を支持する第2軸受部材と、前記第1付勢部材の一方の端部が配置される第1付勢部材配置領域を有し、
前記交差方向において、前記第2軸受部材の所定領域と前記第1付勢部材の所定領域とが同一線上に位置するように配置されることを特徴とする作業工具。 - 請求項1または2に記載された作業工具であって、
前記駆動モータは、出力ギアを備える出力軸部を有し、
前記回転軸部材は、前記出力ギアと係合するギア歯を備える被動ギア部材を有し、
前記交差方向において、前記ギア歯の所定領域と前記第1付勢部材の所定領域とが同一線上に位置するように配置されることを特徴とする作業工具。 - 請求項2に記載された作業工具であって、
前記駆動モータは、出力ギアを備える出力軸部を有し、
前記回転軸部材は、前記出力ギアと係合するギア歯を備える被動ギア部材を有し、
前記被動ギア部材は、前記長手方向に延在するとともに前記回転軸部材に圧入される長手方向延在部を有し、
前記第1付勢部材は、前記交差方向に延在する支持部材と、前記支持部材と前記第1付勢部材配置領域との間に配置されるとともに、前記支持部材を前記第2側から前記第1側へ付勢する弾性要素と、を有し、
前記支持部材は、前記揺動機構に当接する揺動機構側領域と、前記弾性要素と当接する弾性要素側領域と、前記長手方向延在部を貫通する支持部材孔部を有するとともに、前記長手方向延在部に対して往復摺動可能に構成され、
前記交差方向において、前記長手方向延在部の所定領域と前記弾性要素の所定領域とは同一線上に位置するように配置されることを特徴とする作業工具。 - 請求項4に記載された作業工具であって、
前記弾性要素は、複数のコイルスプリングにより構成され、
複数の前記コイルスプリングは、前記交差方向において前記支持部材孔部から等間隔となるよう前記支持部材孔部を挟んで配置されることを特徴とする作業工具。 - 請求項1に記載された作業工具であって、
前記駆動モータは、出力ギアを備える出力軸部と、前記出力軸部の回転動作により規定される第1回転軸と、を有し、
前記回転軸部材は、前記出力ギアと係合する被動ギア部材と、前記回転軸部材の回転動作により規定される第2回転軸と、を有し、
前記被動ギア部材は、べべルギアにより構成されるとともに前記交差方向に延在された交差方向延在部を有し、
前記駆動モータと前記回転軸部材は、前記第1回転軸と前記第2回転軸が交差するよう配置され、
前記第1付勢部材は、前記交差方向延在部と前記揺動機構との間に配置された弾性要素により構成されることを特徴とする作業工具。 - 請求項6に記載された作業工具であって、
前記弾性要素は、大径部と小径部とを有するコニカルスプリングにより構成され、
前記大径部は前記交差方向延在部に向かって配置され、前記小径部は前記揺動機構に向かって配置されることを特徴とする作業工具。 - 請求項1〜7のいずれか1項に記載された作業工具であって、
前記中間子は、前記第1側の第1端部を含む第1領域と、前記第2側の第2端部を含む第2領域と、前記第1領域と前記第2領域の境界に形成される中間領域と、を有し、
前記第2補償機構は、前記第1領域と、前記中間領域と、少なくとも一部の前記第2領域を被覆する被覆部材と、を有し、
前記被覆部材は、前記長手方向に延在する長手方向壁部と、前記交差方向に延在する交差方向壁部と、前記交差方向壁部に設けられるとともに前記第2領域が挿通される被覆部材孔部と、を有し、
前記第2付勢部材は、前記交差方向壁部と前記中間領域の所定領域との間に配置されるコイルスプリングにより構成されることを特徴とする作業工具。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015101949A JP6479570B2 (ja) | 2015-05-19 | 2015-05-19 | 作業工具 |
| CN201610245370.0A CN106166729B (zh) | 2015-05-19 | 2016-04-19 | 作业工具 |
| EP16170175.0A EP3132897B1 (en) | 2015-05-19 | 2016-05-18 | Power tool |
| US15/157,700 US10500706B2 (en) | 2015-05-19 | 2016-05-18 | Power tool |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015101949A JP6479570B2 (ja) | 2015-05-19 | 2015-05-19 | 作業工具 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016215309A JP2016215309A (ja) | 2016-12-22 |
| JP6479570B2 true JP6479570B2 (ja) | 2019-03-06 |
Family
ID=56137079
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015101949A Active JP6479570B2 (ja) | 2015-05-19 | 2015-05-19 | 作業工具 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10500706B2 (ja) |
| EP (1) | EP3132897B1 (ja) |
| JP (1) | JP6479570B2 (ja) |
| CN (1) | CN106166729B (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6325360B2 (ja) * | 2014-06-12 | 2018-05-16 | 株式会社マキタ | 打撃工具 |
| US11052525B2 (en) * | 2016-03-03 | 2021-07-06 | Makita Corporation | Hammer drill |
| JP6709120B2 (ja) | 2016-07-15 | 2020-06-10 | 株式会社マキタ | 打撃工具 |
| US20190136063A1 (en) * | 2017-11-09 | 2019-05-09 | Vinventions Usa, Llc | Particulate material for use in the production of a cork composite material or an article of manufacture comprising cork |
| GB201812437D0 (en) | 2018-07-31 | 2018-09-12 | Black & Decker Inc | Hammer drill |
| JP7193412B2 (ja) * | 2019-04-22 | 2022-12-20 | 株式会社マキタ | 作業工具 |
| DE102020127505A1 (de) * | 2019-10-21 | 2021-04-22 | Makita Corporation | Bohrhammer |
| WO2022216964A1 (en) | 2021-04-07 | 2022-10-13 | Milwaukee Electric Tool Corporation | Impact power tool |
| JP7825526B2 (ja) * | 2022-07-06 | 2026-03-06 | 株式会社マキタ | ハンマドリル |
| CN116652270B (zh) * | 2022-09-08 | 2026-02-06 | 玉环图远机电有限公司 | 一种用于插槽或插齿的动力头 |
| CN115870930A (zh) * | 2022-12-19 | 2023-03-31 | 浙江马特工具有限公司 | 电动工具 |
| JP2025110164A (ja) * | 2024-01-15 | 2025-07-28 | 株式会社マキタ | 打撃工具 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS54165502U (ja) * | 1978-05-09 | 1979-11-20 | ||
| US4325436A (en) * | 1980-05-21 | 1982-04-20 | Hilti Aktiengesellschaft | Hammer drill or chipping hammer device |
| DE3039669A1 (de) * | 1980-10-21 | 1982-05-27 | Robert Bosch Gmbh, 7000 Stuttgart | Bohrhammer |
| DE3506695A1 (de) * | 1985-02-26 | 1986-08-28 | Robert Bosch Gmbh, 7000 Stuttgart | Bohrhammer |
| DE3807078A1 (de) * | 1988-03-04 | 1989-09-14 | Black & Decker Inc | Bohrhammer |
| DE4135240A1 (de) * | 1991-10-25 | 1993-04-29 | Bosch Gmbh Robert | Bohrhammer |
| DE4239294A1 (de) * | 1992-11-23 | 1994-05-26 | Black & Decker Inc | Bohrhammer mit pneumatischem Schlagwerk |
| JP3424880B2 (ja) * | 1995-08-18 | 2003-07-07 | 株式会社マキタ | ハンマードリル |
| US5954140A (en) * | 1997-06-18 | 1999-09-21 | Milwaukee Electric Tool Corporation | Rotary hammer with improved pneumatic drive system |
| GB0213289D0 (en) * | 2002-06-11 | 2002-07-24 | Black & Decker Inc | Rotary hammer |
| DE102004058686A1 (de) * | 2004-09-03 | 2006-03-09 | Robert Bosch Gmbh | Elektrowerkzeug mit einem zwischen den Betriebsarten Bohren, Schlagbohren, Meißeln umschaltbaren Antrieb |
| JP4815119B2 (ja) * | 2004-10-15 | 2011-11-16 | 株式会社マキタ | 往復作動式作業工具 |
| JP4593387B2 (ja) * | 2005-07-04 | 2010-12-08 | 株式会社マキタ | 電動工具 |
| GB2435442A (en) * | 2006-02-24 | 2007-08-29 | Black & Decker Inc | Powered hammer with helically shaped vent channel |
| US20100038104A1 (en) * | 2006-07-10 | 2010-02-18 | Otto Baumann | Hand held machine tool |
| DE102006056849A1 (de) * | 2006-12-01 | 2008-06-05 | Robert Bosch Gmbh | Handwerkzeugmaschine |
| DE102006060320A1 (de) * | 2006-12-20 | 2008-06-26 | Robert Bosch Gmbh | Schlagwerk für eine Handwerkzeugmaschine |
| JP5100171B2 (ja) * | 2007-03-27 | 2012-12-19 | 株式会社マキタ | 衝撃式作業工具 |
| US8485274B2 (en) | 2007-05-14 | 2013-07-16 | Makita Corporation | Impact tool |
| JP4965334B2 (ja) * | 2007-05-14 | 2012-07-04 | 株式会社マキタ | 打撃工具 |
| JP5058726B2 (ja) * | 2007-09-06 | 2012-10-24 | 株式会社マキタ | 打撃工具 |
| DE102008010100A1 (de) * | 2008-02-20 | 2009-08-27 | Robert Bosch Gmbh | Handwerkzeugmaschine |
| JP5345893B2 (ja) * | 2009-05-08 | 2013-11-20 | 株式会社マキタ | 打撃工具 |
| JP5456555B2 (ja) * | 2010-04-23 | 2014-04-02 | 株式会社マキタ | 電動工具 |
| JP5518617B2 (ja) * | 2010-08-02 | 2014-06-11 | 株式会社マキタ | 打撃工具 |
| JP5635945B2 (ja) * | 2011-05-24 | 2014-12-03 | 株式会社マキタ | 電動工具 |
| DE102012209875A1 (de) * | 2012-06-13 | 2013-12-19 | Robert Bosch Gmbh | Schlagwerk |
| JP2015047661A (ja) * | 2013-08-30 | 2015-03-16 | 日立工機株式会社 | 打撃工具 |
-
2015
- 2015-05-19 JP JP2015101949A patent/JP6479570B2/ja active Active
-
2016
- 2016-04-19 CN CN201610245370.0A patent/CN106166729B/zh active Active
- 2016-05-18 US US15/157,700 patent/US10500706B2/en active Active
- 2016-05-18 EP EP16170175.0A patent/EP3132897B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10500706B2 (en) | 2019-12-10 |
| EP3132897A1 (en) | 2017-02-22 |
| JP2016215309A (ja) | 2016-12-22 |
| CN106166729A (zh) | 2016-11-30 |
| US20160339577A1 (en) | 2016-11-24 |
| EP3132897B1 (en) | 2020-07-15 |
| CN106166729B (zh) | 2020-10-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6479570B2 (ja) | 作業工具 | |
| JP6309881B2 (ja) | 作業工具 | |
| JP6096593B2 (ja) | 往復動式作業工具 | |
| JP6325360B2 (ja) | 打撃工具 | |
| JP5171397B2 (ja) | 手持式作業工具 | |
| JP5128998B2 (ja) | 手持式作業工具 | |
| JP5294726B2 (ja) | 手持式作業工具 | |
| JP5767511B2 (ja) | 往復動式作業工具 | |
| JP2006272511A (ja) | 往復作動式作業工具 | |
| CN107107322B (zh) | 冲击工具 | |
| JP6510250B2 (ja) | 作業工具 | |
| JP5356097B2 (ja) | 打撃工具 | |
| JP6397337B2 (ja) | 電動工具 | |
| JP2017042887A (ja) | 打撃工具 | |
| JP4815119B2 (ja) | 往復作動式作業工具 | |
| JP6348337B2 (ja) | 往復動式作業工具 | |
| JP6517633B2 (ja) | 打撃工具 | |
| JP6612496B2 (ja) | 打撃工具 | |
| WO2023281866A1 (ja) | 作業機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171121 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180912 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190201 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190206 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6479570 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |