JP6476868B2 - ピッキングシステム - Google Patents
ピッキングシステム Download PDFInfo
- Publication number
- JP6476868B2 JP6476868B2 JP2015000460A JP2015000460A JP6476868B2 JP 6476868 B2 JP6476868 B2 JP 6476868B2 JP 2015000460 A JP2015000460 A JP 2015000460A JP 2015000460 A JP2015000460 A JP 2015000460A JP 6476868 B2 JP6476868 B2 JP 6476868B2
- Authority
- JP
- Japan
- Prior art keywords
- storage shelf
- transfer device
- container
- picking system
- transfer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000032258 transport Effects 0.000 claims description 22
- 239000000725 suspension Substances 0.000 description 3
- 239000000470 constituent Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000007547 defect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
Images
Landscapes
- Warehouses Or Storage Devices (AREA)
Description
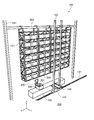
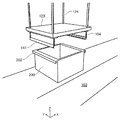
図1は、ピッキングシステムを搬送装置側から示す斜視図である。
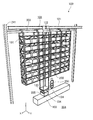
続いて、実施の形態2について説明する。なお、実施の形態1と同様の作用や機能、同様の形状や機構や構造を有するもの(部分)には同じ符号を付して説明を省略する場合がある。また、以下では実施の形態1と異なる点を中心に説明し、同じ内容については説明を省略する場合がある。
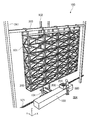
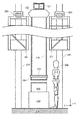
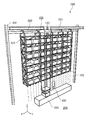
101 保管棚
102 搬送装置
103 作業台
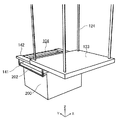
104 移載装置
105 人感センサ
121 軌条
122 走行車
123 昇降台
124 吊り部材
141 鈎部
142 アーム
200 容器
201 物品
202 係合部
203 梁部材
204 基礎部
241 支柱
300 作業者
Claims (3)
- 保管された複数の容器内にそれぞれ収容される物品を作業者が選択的に取り出すピッキングシステムであって、
上下方向、および、横方向に前記容器を並べて保持可能な吊り下げ式の保管棚と、
前記保管棚に沿って移動し、前記容器を搬送する吊り下げ式の搬送装置と、
前記搬送装置の下方であって、作業者が作業する作業領域内に配置される作業台と、
前記保管棚と前記搬送装置との間、および、前記搬送装置の直下に配置される前記作業台と前記搬送装置との間で前記容器を移載する移載装置とを備える
ピッキングシステム。 - 保管された複数の容器内にそれぞれ収容される物品を作業者が選択的に取り出すピッキングシステムであって、
上下方向、および、横方向に前記容器を並べて保持可能な吊り下げ式の保管棚と、
前記保管棚に沿って移動し、前記容器を搬送する搬送装置と、
前記保管棚、および、前記搬送装置の少なくとも一方の下方であって、作業者が作業する作業領域内に配置される作業台と、
前記保管棚と前記搬送装置との間、および、前記作業台と前記搬送装置との間で前記容器を移載する移載装置と、
前記搬送装置の横方向の移動方向に並んだ状態で前記保管棚に取り付けられ、前記保管棚下方の人の存在を検知する人感センサと
を備えるピッキングシステム。 - 前記搬送装置は、吊り下げ式である
請求項2に記載のピッキングシステム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015000460A JP6476868B2 (ja) | 2015-01-05 | 2015-01-05 | ピッキングシステム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015000460A JP6476868B2 (ja) | 2015-01-05 | 2015-01-05 | ピッキングシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016124677A JP2016124677A (ja) | 2016-07-11 |
| JP6476868B2 true JP6476868B2 (ja) | 2019-03-06 |
Family
ID=56358770
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015000460A Expired - Fee Related JP6476868B2 (ja) | 2015-01-05 | 2015-01-05 | ピッキングシステム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6476868B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109720765A (zh) * | 2019-01-26 | 2019-05-07 | 西安威仁自动化科技有限公司 | 一种自动存取物料装置 |
| JP7580101B2 (ja) * | 2020-03-02 | 2024-11-11 | 伊東電機株式会社 | 倉庫装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2662837B2 (ja) * | 1991-12-24 | 1997-10-15 | 璋 伊東 | 棚部材昇降装置 |
| JPH06277122A (ja) * | 1993-03-29 | 1994-10-04 | Kajima Corp | 空間利用の収納設備 |
| JP3333273B2 (ja) * | 1993-05-28 | 2002-10-15 | 麒麟麦酒株式会社 | ピッキング装置 |
| JP5316844B2 (ja) * | 2008-07-01 | 2013-10-16 | 株式会社ダイフク | 物品収納設備 |
-
2015
- 2015-01-05 JP JP2015000460A patent/JP6476868B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016124677A (ja) | 2016-07-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7057370B2 (ja) | 自動貯蔵および回収システム | |
| TWI722208B (zh) | 搬送系統 | |
| TWI828841B (zh) | 保管系統 | |
| RU2555083C2 (ru) | Подвесная роботизированная система и способ ее работы | |
| JP6222135B2 (ja) | 自動倉庫 | |
| TWI714809B (zh) | 搬送系統 | |
| CN113195379B (zh) | 保管系统 | |
| TW201940396A (zh) | 倉儲系統 | |
| JP6915366B2 (ja) | 有軌道搬送車システム | |
| CN101104473A (zh) | 物品贮存装置 | |
| WO2021215132A1 (ja) | 自動倉庫システム | |
| JP2016210518A (ja) | 自動倉庫及びその運転方法 | |
| JP6476868B2 (ja) | ピッキングシステム | |
| JP2018154479A (ja) | 立体自動倉庫 | |
| JP2019006517A (ja) | 荷物受け渡しシステム | |
| JP2017165513A (ja) | ピッキングシステム | |
| JP5966588B2 (ja) | カゴ台車用移載装置 | |
| JP2011246223A (ja) | 自動倉庫 | |
| JP2018080028A (ja) | 自動倉庫 | |
| JP2017109284A (ja) | ワーク搬送システム、レーザ加工システム、及びワーク搬送方法 | |
| JP2010241547A (ja) | 走行車システム | |
| JP6256174B2 (ja) | 自動倉庫 | |
| JP2019123614A (ja) | コンテナクレーン及びコンテナクレーンによる荷役方法 | |
| JP4834128B2 (ja) | 搬送システム | |
| JP4834127B2 (ja) | 搬送システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171023 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180809 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180821 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180921 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190108 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190121 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6476868 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |