JP5966588B2 - カゴ台車用移載装置 - Google Patents
カゴ台車用移載装置 Download PDFInfo
- Publication number
- JP5966588B2 JP5966588B2 JP2012110404A JP2012110404A JP5966588B2 JP 5966588 B2 JP5966588 B2 JP 5966588B2 JP 2012110404 A JP2012110404 A JP 2012110404A JP 2012110404 A JP2012110404 A JP 2012110404A JP 5966588 B2 JP5966588 B2 JP 5966588B2
- Authority
- JP
- Japan
- Prior art keywords
- cart
- wheel
- passage surface
- stacker crane
- pair
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Description
本発明の課題は、カゴ台車を低コストでスタッカクレーンに移載できるようにすることにある。
本発明の一見地に係るカゴ台車用移載装置は、カゴ台車をスタッカクレーンとの間で移載する移載装置である。カゴ台車用移載装置は、一対の車輪受け部と、昇降装置と、旋回装置と、制御装置とを備える。一対の車輪受け部は、スタッカクレーンの走行方向に沿った第1方向に間隔を隔てて配置され、カゴ台車の車輪を受ける。昇降装置は、昇降台と、昇降駆動部と、を有する。昇降台は、一対の車輪受け部の間に配置され、一対の車輪受け部と実質的に同じ高さの上昇位置からスタッカクレーンのフォークの厚み以上下降可能である。昇降駆動部は、昇降台を昇降駆動する。旋回装置は、一対の車輪受け部と昇降装置とを一体的に180度旋回させる。制御装置は、スタッカクレーンの走向経路を挟んで配置されたラックのうちどちら側のラックにカゴ台車を収納するか、又はどちら側のラックからカゴ台車を搬出するかを基準に、旋回装置を旋回させるか否かを判断する。
この移載装置では、カゴ台車をスタッカクレーンに移載する場合、カゴ台車を第1方向に間隔を隔てて配置された車輪受け部に配置する。この状態で昇降装置の昇降台を昇降駆動部により上昇位置からフォークの厚み以上下降させる。これにより、昇降台の上面と車輪受け部の下面との間にスタッカクレーンのフォークを配置可能な空間が形成される。この空間にフォークを進入させて、フォークを上昇させることにより、スタッカクレーンのフォークがカゴ台車の下面を支持してラックに搬送可能になる。
旋回装置により、移載装置への搬入時と移載装置からの搬出時とで、カゴ台車の走行方向の後部に自在車輪を配置できる。また、一対の車輪受け部と昇降装置とを一体で旋回できるので、車輪受け部と昇降装置の昇降台との隙間を小さくすることができる。
ここでは、昇降台が平面視十字状に形成されるので、スタッカクレーンのフォークを平面視十字状に形成しても、カゴ台車の下面を支持した状態でフォークを上方に移動させることができる。このため、フォークにおいて、カゴ台車の下面の第1方向の支持長さが長くなり、スタッカクレーンの走行中にカゴ台車の下面をフォークが安定して支持できる。また、カゴ台車が第1通過面及び第2通過面を通過するとき、第1通過面及び第2通過面の下方で昇降駆動部が昇降台の荷重を受けるので、第1通過面及び第2通過面ががたつきにくくなる。
ここでは、それぞれ別に設けられた第1通過面、第2通過面、及び非通過面が、第1エアシリンダ、第2エアシリンダ、及び第3エアシリンダにより別々に昇降される。このため、第1通過面、第2通過面、及び非通過面が一体で設けられる場合に必要になる、3種類のエアシリンダを同期して動作させる必要がなくなる。すなわち、各エアシリンダの同期を取ることなく第1通過面、第2通過面、及び非通過面を昇降させることができる。これにより、各エアシリンダにより昇降台の第1通過面、第2通過面及び非通過面を直接昇降でき、かつ3種類のエアシリンダの空圧制御が容易である。このため、昇降装置の構成及び制御を簡素化でき、昇降装置のコストを削減できる。
これにより、旋回時にカゴ台車の移動が規制され、旋回時にカゴ台車ががたつきにくくなる。
カゴ台車は、カゴ台車の進行方向後側に配置され、進行方向と交差する方向の側面から突出可能な自在車輪を有している。カゴ台車用移載装置は、第1ガイド部材と、第2ガイド部材と、をさらに備えている。第1ガイド部材は、上方に延びると共に上部が下部よりカゴ台車から離反するように斜めに形成され、カゴ台車を上方から一対の車輪受け部に下ろすときに自在車輪と同じ側に配置されており、カゴ台車を案内すると共に前記自在車輪が側面から突出している場合に当接することで前記自在車輪を旋回させるパイプ製の部材である。第2ガイド部材は、第1ガイド部材と第1方向に交差する第2方向に間隔を隔てて設けられ、上部が下部よりカゴ台車から離反するような斜面を有し、カゴ台車を案内する板材製の部材である。
これにより、スタッカクレーンのフォークにより車輪受け部にカゴ台車が移載されるとき、側面から突出可能な自在車輪が側面から突出しても自在車輪が第1ガイド部材に接触すると、軸回りに旋回可能である。このため、車輪受け部への荷下ろし時に自在車輪が損傷しなくなる。
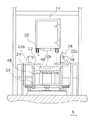
図1及び図2に示すように、移載装置20は、スタッカクレーン10の走行経路12に隣接して配置される。スタッカクレーン10は、第1方向Xに沿って走行し、図示しないラックとの間でカゴ台車14の荷積み及び荷下ろしする。スタッカクレーン10は、カゴ台車14の下面を支持する平面視十字形状のフォーク10aを有する。スタッカクレーン10は、第1方向Xに沿って配置される走行経路12に沿って走行する。また、フォーク10aは、第1方向Xと直交する第2方向Yの両方向(図1の上下方向)に伸縮する。
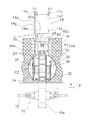
車輪受け部22は、図3及び図4に示すように、カゴ台車14の第1自在車輪14bと第1固定車輪14dとを受ける第1受け部22aと、第2自在車輪14cと第2固定車輪14eとを受ける第2受け部22bと、を有する。第1受け部22a及び第2受け部22bは、旋回装置26の後述する旋回テーブル54上に固定される第1受けフレーム40a及び第2受けフレーム40bと、第1受けフレーム40a及び第2受けフレーム40b上に各別に固定される第1受け板42a及び第2受け板42bと、を有する。第1受け板42a及び第2受け板42bは、左右対称の形状である。第1受け板42a及び第2受け板42bは、外側部がそれぞれ円弧状であり、内側部に昇降装置24の後述する昇降台46の外側部に沿って形成された第1凹部42c及び第2凹部42dが各別に形成される。第1受け板42a上に、クランプ部28の後述する第1クランプ部28aと、第1ガイド部材30と、第2ガイド部材32とが設けられる。第2受け板42b上に、クランプ部28の後述する第2クランプ部28bと第3ガイド部材34とが設けられる。また、第1受け板42a及び第2受け板42bには、カゴ台車14の第1固定車輪14dを第2方向に位置決めするための第1位置決めストッパ49aと、第2固定車輪14eを第2方向Yに位置決めするための第2位置決めストッパ49bが各別に設けられている。図2に示すように、第1位置決めストッパ49a及び第2位置決めストッパ49bは、第1受け板42a及び第2受け板42bのそれぞれ外側に屈曲する傾斜部49cを有する。この傾斜部49cにより、スタッカクレーン10からカゴ台車14を車輪受け部22に下ろすときに、カゴ台車14の第2方向Yのずれを修正する。
昇降装置24は、昇降台46と、昇降台46を昇降駆動する昇降駆動部48と、を有する。昇降台46は、車輪受け部22の間に配置され、車輪受け部22と実質的に同じ高さの上昇位置からスタッカクレーン10のフォーク10aの厚み以上下降可能である。昇降台46は、第1通過面46aと、第2通過面46bと、非通過面46cと、を有し、フォーク10aと概ね同じ平面視十字形状である。したがって、昇降台46がフォーク10aの下方に下降すると、フォーク10aを昇降台46の上方に進入させることによりフォーク10aがカゴ台車14を支持して上方に移動可能になる。
旋回装置26は、図1、図2及び図4に示すように、旋回テーブル54を有する旋回部50と、旋回部50を旋回駆動する旋回駆動部52と、を有する。旋回部50は、旋回テーブル54と、旋回テーブル54を支持する旋回フレーム56と、を有する。旋回テーブル54は、概ね円形板状の部材である。旋回テーブル54の下面の外周側には、旋回テーブル54を支持する複数(例えば3つ)のローラ57が周方向に間隔を隔てて配置されている。ローラ57の径方向外側には、旋回駆動用のチェーン64が案内されるチェーンガイド54aが環状に設けられている。旋回テーブル54の下面の中心部には、旋回フレーム56に設けられた旋回軸58が配置されている。旋回軸58は、旋回テーブル54を回転自在に支持する。旋回フレーム56の上面には、旋回テーブル54の周方向に位置決めするための旋回位置決めストッパ60が設けられている。旋回位置決めストッパ60は、旋回テーブル54の下面180度間隔で取り付けられた当接板54bに接触し、旋回テーブル54の旋回範囲を180度に規制する。
は、旋回テーブル54の側面に固定されている。
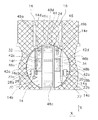
クランプ部28は、図3及び図4に示すように、車輪受け部22の第1受け部22aと第2受け部22bの第1自在車輪14b及び第2自在車輪14cに近い側に設けられる。クランプ部28は、カゴ台車を第1方向でクランプする。クランプ部28は、カゴ台車14の第1自在車輪14b側の側面14fに接触する第1クランプ部28aと、第2自在車輪14c側の側面14gに接触する第2クランプ部28bと、を有する。第2クランプ部28bは、第1クランプ部28aと第1方向Xに間隔を隔てて対向して配置される。第1クランプ部28aは、第1ガイド部材30と第2ガイド部材32との間に配置される。第2クランプ部28bは、第3ガイド部材34を貫通してカゴ台車14の側面14gに接触する。第1クランプ部28a及び第2クランプ部28bは、それぞれガイド付きのエアシリンダを有しており、エアシリンダの先端に装着された、例えば弾性体製の横長の矩形のヘッド28cにより、カゴ台車14の側面14f及び側面14gの下部を第1方向においてクランプする。ここでは、回動して移動しやすい自在車輪側をクランプすることにより、旋回時にカゴ台車14に慣性力が作用してもカゴ台車14ががたつきにくくなる。
第1ガイド部材30、第2ガイド部材32、及び第3ガイド部材34は、スタッカクレーン10のフォーク10aの下降によりカゴ台車14を車輪受け部22に下ろすとき、カゴ台車14を第1受け部22a及び第2受け部22bの所定の位置に案内するために設けられる。第1ガイド部材30は、第1受け部22aの第1自在車輪14bが配置される側に設けられる。第1ガイド部材30は、カゴ台車14の側面14fを案内する概ねパイプ製の部材である。第1ガイド部材30は、図7に示すように、第1固定部30aと、第1連結部30bと、第1ガイド部30cと、を有する。第1固定部30aは、第1受け部22aにカゴ台車14から離反した位置に固定されて上方に延びる。第1連結部30bは、第1固定部30aより小径のパイプ製であり、第1固定部30aからカゴ台車14に向けて延びた後に屈曲して上方に延びる。第1ガイド部30cは、第1連結部30bから上部が下部よりカゴ台車14から離反するように斜めに形成される。この第1ガイド部30cによって、カゴ台車14の側面14fが第1受け部22aに案内される。
これにより、車輪受け部22にカゴ台車14を下ろすとき、第1自在車輪14bが側面14fから突出して第1ガイド部材30の第1ガイド部30cに接触すると、第1自在車輪14bが旋回軸C1回りに旋回する。このため、カゴ台車14を車輪受け部22へ下ろすときに第1自在車輪14bが損傷しなくなる。
上記のような構成の移載装置20では、カゴ台車14をスタッカクレーン10に移載する場合、作業者はカゴ台車14を車輪受け部22に搬入する。具体的には、第1位置決めストッパ49a及び第2位置決めストッパ49bに第1固定車輪14d及び第2固定車輪14eが接触するまで作業者はカゴ台車14を搬送する。この搬入途中で、前側の第1固定車輪14d及び第2固定車輪14eは、第1通過面46a及び第2通過面46bを通過する。しかし、第1通過面46a及び第2通過面46bの下方に第1エアシリンダ48a及び第2エアシリンダ48bが配置されている。このため、カゴ台車14の荷重が第1通過面46a及び第2通過面46bに作用しても、第1通過面46a及び第2通過面46bががたつきにくい。作業者が移載装置20から退去して例えばシャッタを閉じて所定のスイッチを操作すると、制御装置による制御が開始され、移載装置20が動作を開始する。
上記実施形態は、下記のように表現可能である。
(A)移載装置20(カゴ台車用移載装置の一例)は、カゴ台車14(カゴ台車の一例))をスタッカクレーン10(スタッカクレーンの一例)との間で移載する。移載装置20は、車輪受け部22(車輪受け部の一例)と、昇降装置24(昇降装置の一例)と、を備える。車輪受け部22は、スタッカクレーンの走行方向に沿った第1方向Xに間隔を隔てて配置され、カゴ台車13の第1自在車輪14b、第2自在車輪14c、第1固定車輪14d及び第2固定車輪14e(車輪の一例)を受ける。昇降装置24は、昇降台46(昇降台の一例)と、昇降駆動部48(昇降駆動部の一例)と、を有する。昇降台46は、車輪受け部22の間に配置され、車輪受け部22と実質的に同じ高さの上昇位置からスタッカクレーン10のフォーク10aの厚み以上下降可能である。昇降駆動部48は、昇降台46を昇降駆動する。
この移載装置20では、カゴ台車14をスタッカクレーン10に移載する場合、カゴ台車14を第1方向Xに間隔を隔てて配置された車輪受け部22に配置する。この状態で昇降装置24の昇降台46を昇降駆動部48により上昇位置からフォークの厚み以上下降させる。これにより、昇降台46の上面と車輪受け部22の下面との間にスタッカクレーン10のフォーク10aを配置可能な空間が形成される。この空間にフォーク10aを進入させて、フォーク10aを上昇させることにより、スタッカクレーン10のフォーク10aがカゴ台車14の下面を支持してラックに搬送可能になる。
ここでは、固定された車輪受け部22でカゴ台車14の第1自在車輪14b、第2自在車輪14c、第1固定車輪14d及び第2固定車輪14eを受ける。そして、カゴ台車14を下降させずに、車輪受け部22の間に配置された昇降台46を下降させるだけで、カゴ台車14をスタッカクレーン10に受け渡すことができる。このため、昇降装置24では、物品が収納されたカゴ台車14全体を昇降させる必要がなくなる。これにより、昇降装置24の小型化を図れ、昇降装置24のコストを下げることができる。このため、カゴ台車14を低コストでスタッカクレーン10に移載できるようになる。
ここでは、昇降台46が平面視十字状に形成されるので、スタッカクレーン10のフォーク10aを平面視十字状に形成しても、カゴ台車14の下面を支持した状態でフォーク10aを上方に移動させることができる。このため、フォーク10aにおいて、カゴ台車14の下面の第1方向Xの支持長さが長くなり、スタッカクレーン10の走行中にカゴ台車14の下面をフォーク10aが安定して支持できる。また、カゴ台車14が第1通過面46a及び第2通過面46bを通過するとき、第1通過面46a及び第2通過面46bの下方で昇降駆動部48が昇降台46の荷重を受けるので、第1通過面46a及び第2通過面46bががたつきにくくなる。
ここでは、それぞれ別に設けられた第1通過面46a、第2通過面46b、及び非通過面46cが第1エアシリンダ48a、第2エアシリンダ48b、及び第3エアシリンダ48cにより別々に昇降される。このため、第1通過面及び第2通過面、及び非通過面が一体で設けられる場合に必要になる、3種類のエアシリンダを同期して動作させる必要がなくなる。すなわち、各エアシリンダの同期を取ることなく第1通過面46a、第2通過面46b、及び非通過面46cを昇降させることができる。これにより、各エアシリンダにより昇降台46の第1通過面46a、第2通過面46b及び非通過面46cを直接昇降でき、かつ3種類のエアシリンダの空圧制御が容易である。このため、昇降装置24の構成及び制御を簡素化でき、昇降装置24のコストを削減できる。
これにより、移載装置20への搬入時と移載装置20からの搬出時とでカゴ台車14の走行方向の後部に第1自在車輪14b及び第2自在車輪14cを配置できる。また、車輪受け部22と昇降装置24とを一体で旋回できるので、車輪受け部22と昇降装置24の昇降台46との隙間を小さくすることができる。
これにより、旋回時にカゴ台車14の移動が規制され、旋回時にカゴ台車14ががたつきにくくなる。
これにより、スタッカクレーン10のフォーク10aにより車輪受け部22にカゴ台車が移載されるとき、側面14fから突出可能な第1自在車輪14bが側面14fから突出しても第1自在車輪14bが第1ガイド部材30に接触すると、軸回りに旋回可能である。このため、車輪受け部22への荷下ろし時に第1自在車輪14bが損傷しなくなる。
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。特に、本明細書に書かれた複数の実施形態及び変形例は必要に応じて任意に組み合せ可能である。
(a)前記実施形態では、カゴ台車を安定させるために昇降台46にカゴ台車14の車輪が通過する通過面を設け、昇降台を十字形状にしたが、通過面を設けずに昇降台を矩形に形成してもよい。
10a フォーク
12 走行経路
14 カゴ台車
14a 扉
14b 第1自在車輪
14c 第2自在車輪
14d 第1固定車輪
14e 第2固定車輪
14f 側面
14g 側面
16 案内部材
20 移載装置
22 車輪受け部
22a 第1受け部
22b 第2受け部
24 昇降装置
26 旋回装置
28 クランプ部
28a 第1クランプ部
28b 第2クランプ部
28c ヘッド
30 第1ガイド部材
30a 第1固定部
30b 第1連結部
30c 第1ガイド部
32 第2ガイド部材
32a 第2固定部
32b 第2連結部
32c 第2ガイド部
32d 斜面
34 第3ガイド部材
34a 第3固定部
34b 第3連結部
34c 第3ガイド部
34d 斜面
40a 第1受けフレーム
40b 第2受けフレーム
42a 第1受け板
42b 第2受け板
42c 第1凹部
42d 第2凹部
46 昇降台
46a 第1通過面
46b 第2通過面
46c 非通過面
48 昇降駆動部
48a 第1エアシリンダ
48b 第2エアシリンダ
48c,48d 第3エアシリンダ
49a 第1位置決めストッパ
49b 第2位置決めストッパ
49c 傾斜部
50 旋回部
52 旋回駆動部
54 旋回テーブル
54a チェーンガイド
54b 当接板
56 旋回フレーム
57 ローラ
58 旋回軸
60 旋回位置決めストッパ
62 モータ駆動部
62a 出力軸
64 チェーン
66a 駆動スプロケット
66b 従動スプロケット
Claims (5)
- カゴ台車をスタッカクレーンとの間で移載するカゴ台車用移載装置であって、
前記スタッカクレーンの走行方向に沿った第1方向に間隔を隔てて配置され、前記カゴ台車の車輪を受ける一対の車輪受け部と、
前記一対の車輪受け部の間に配置され、前記一対の車輪受け部と実質的に同じ高さの上昇位置から前記スタッカクレーンのフォークの厚み以上下降可能な昇降台、及び前記昇降台を昇降駆動する昇降駆動部と、を有する昇降装置と、
前記一対の車輪受け部と前記昇降装置とを一体的に180度旋回させる旋回装置と、
前記スタッカクレーンの走向経路を挟んで配置されたラックのうちどちら側のラックに前記カゴ台車を収納するか、又はどちら側のラックから前記カゴ台車を搬出するかを基準に、前記旋回装置を旋回させるか否かを判断する制御装置と、
を備えるカゴ台車用移載装置。 - カゴ台車をスタッカクレーンとの間で移載するカゴ台車用移載装置であって、
前記スタッカクレーンの走行方向に沿った第1方向に間隔を隔てて配置され、前記カゴ台車の車輪を受ける一対の車輪受け部と、
前記一対の車輪受け部の間に配置され、前記一対の車輪受け部と実質的に同じ高さの上昇位置から前記スタッカクレーンのフォークの厚み以上下降可能な昇降台、及び前記昇降台を昇降駆動する昇降駆動部と、を有する昇降装置と、を備え、
前記カゴ台車は、前記カゴ台車の進行方向後側に配置され前記進行方向と交差する方向の側面から突出可能な自在車輪を有し、
上方に延びると共に上部が下部より前記カゴ台車から離反するように斜めに形成され、前記カゴ台車を上方から前記一対の車輪受け部に下ろすときに前記自在車輪と同じ側に配置されており、前記カゴ台車を案内すると共に前記自在車輪が前記側面から突出している場合に当接することで前記自在車輪を旋回させるパイプ製の第1ガイド部材と、
前記第1ガイド部材と前記第1方向に交差する第2方向に間隔を隔てて設けられ、上部が下部より前記カゴ台車から離反するような斜面を有し、前記カゴ台車を案内する板材製の第2ガイド部材と、をさらに備える、カゴ台車用移載装置。 - 前記昇降台は、前記一対の車輪受け部の間に配置されかつ前記第1方向に間隔を隔てて配置されるとともに、前記車輪が通過可能な第1通過面及び第2通過面と、前記第1通過面と前記第2通過面との間に配置され、前記車輪が通過しない非通過面とを有する平面視十字形状であり、
前記昇降駆動部は、少なくとも前記第1通過面及び前記第2通過面の下方に配置される、請求項1又は2に記載のカゴ台車用移載装置。 - 前記昇降台の前記第1通過面、前記第2通過面、及び前記非通過面のそれぞれは別に設けられ、
前記昇降駆動部は、
前記第1通過面を昇降させる第1エアシリンダと、
前記第2通過面を昇降させる第2エアシリンダと、
前記非通過面を昇降させる第3エアシリンダと、を有する、請求項3に記載のカゴ台車用移載装置。 - 前記一対の車輪受け部に設けられ、前記カゴ台車を前記第1方向でクランプするクランプ部をさらに備える、請求項1又は2に記載のカゴ台車用移載装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012110404A JP5966588B2 (ja) | 2012-05-14 | 2012-05-14 | カゴ台車用移載装置 |
| CN201310094924.8A CN103420066B (zh) | 2012-05-14 | 2013-03-22 | 筐式台车用移载装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012110404A JP5966588B2 (ja) | 2012-05-14 | 2012-05-14 | カゴ台車用移載装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013237516A JP2013237516A (ja) | 2013-11-28 |
| JP5966588B2 true JP5966588B2 (ja) | 2016-08-10 |
Family
ID=49645543
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012110404A Active JP5966588B2 (ja) | 2012-05-14 | 2012-05-14 | カゴ台車用移載装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5966588B2 (ja) |
| CN (1) | CN103420066B (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105151612A (zh) * | 2015-06-24 | 2015-12-16 | 施婷婷 | 一种旋转式仓储提升机 |
| CN108529263A (zh) * | 2018-03-20 | 2018-09-14 | 莫越云 | 一种超大件随车自动卸货装置 |
| JP7460124B2 (ja) | 2020-03-12 | 2024-04-02 | 株式会社カワタ | 粉粒体供給装置および粉粒体供給方法 |
| CN113998354B (zh) * | 2021-09-07 | 2023-04-07 | 凯盛光伏材料有限公司 | 一种用于cigs薄膜电池产线的重载型高精度搬运装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS562264A (en) * | 1979-06-18 | 1981-01-10 | Daifuku Machinery Works | Transportation truck with caster wheel and housing facility of same |
| JPS6317703A (ja) * | 1986-07-07 | 1988-01-25 | Daifuku Co Ltd | 倉庫設備 |
| JPS63300175A (ja) * | 1987-05-29 | 1988-12-07 | 新明和工業株式会社 | 多層循環式駐車設備におけるパレット旋回装置 |
| JPH05286520A (ja) * | 1992-04-07 | 1993-11-02 | Nippon Steel Corp | 円筒状物品の移載装置 |
| IT1257814B (it) * | 1992-05-26 | 1996-02-13 | Gd Spa | Dispositivo per l'alimentazione di bobine ad una macchina utilizzatrice |
| JP2868964B2 (ja) * | 1993-01-19 | 1999-03-10 | 株式会社日立製作所 | 自動倉庫の入出庫設備及びそれを使っての入出庫方法 |
| JPH0986610A (ja) * | 1995-09-26 | 1997-03-31 | Murata Mach Ltd | カゴ台車用自動倉庫 |
| JP2002240908A (ja) * | 2001-02-15 | 2002-08-28 | Daifuku Co Ltd | 荷受けシステムおよび荷受けシステムを備えた棚設備 |
| JP3835189B2 (ja) * | 2001-03-29 | 2006-10-18 | 株式会社ダイフク | 物品供給設備 |
| CN2716205Y (zh) * | 2004-06-07 | 2005-08-10 | 江苏天奇物流系统工程股份有限公司 | 液压升降回转移载装置 |
| JP4501064B2 (ja) * | 2004-09-09 | 2010-07-14 | 株式会社ダイフク | スタッカークレーン |
| JP4297145B2 (ja) * | 2006-09-21 | 2009-07-15 | 村田機械株式会社 | 移載装置 |
-
2012
- 2012-05-14 JP JP2012110404A patent/JP5966588B2/ja active Active
-
2013
- 2013-03-22 CN CN201310094924.8A patent/CN103420066B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN103420066B (zh) | 2017-03-01 |
| JP2013237516A (ja) | 2013-11-28 |
| CN103420066A (zh) | 2013-12-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI443037B (zh) | 架空式搬運系統及物品之移載方法 | |
| JP4666213B2 (ja) | 物品収納設備 | |
| JP4586990B2 (ja) | 物品収納設備 | |
| JP4378655B2 (ja) | 物品処理設備 | |
| JP4844824B2 (ja) | 物品保管設備 | |
| KR101942394B1 (ko) | 퍼지 장치 및 퍼지 방법 | |
| TWI714809B (zh) | 搬送系統 | |
| WO2015190387A1 (ja) | コンテナ昇降搬送装置 | |
| JP2009256004A (ja) | 物品収納設備 | |
| JP6256694B2 (ja) | コンテナ昇降搬送装置 | |
| WO2015190396A1 (ja) | コンテナ昇降搬送装置 | |
| JP5966588B2 (ja) | カゴ台車用移載装置 | |
| WO2015190393A1 (ja) | コンテナ昇降搬送装置 | |
| WO2015190395A1 (ja) | コンテナ昇降搬送装置 | |
| JP2018039660A (ja) | 物品搬送設備 | |
| JP2013052938A (ja) | 仕分けシステム | |
| JP6593270B2 (ja) | 物品搬送設備 | |
| JP2011032001A (ja) | 搬送車システム | |
| JP2010159118A (ja) | 自動倉庫 | |
| JP2011051748A (ja) | ローダアンローダと搬送車と装置間のロードアンロード方法 | |
| KR100935868B1 (ko) | 자동창고 | |
| JP2006143364A (ja) | 物品搬送装置 | |
| JP6197753B2 (ja) | 物品搬送設備 | |
| JP2007076919A (ja) | 移載システムおよびそれを備える保管設備 | |
| JP2017007860A (ja) | 昇降搬送装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150224 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160129 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160607 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160620 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5966588 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |