JP6440177B2 - 穿刺ロボット - Google Patents
穿刺ロボット Download PDFInfo
- Publication number
- JP6440177B2 JP6440177B2 JP2017506443A JP2017506443A JP6440177B2 JP 6440177 B2 JP6440177 B2 JP 6440177B2 JP 2017506443 A JP2017506443 A JP 2017506443A JP 2017506443 A JP2017506443 A JP 2017506443A JP 6440177 B2 JP6440177 B2 JP 6440177B2
- Authority
- JP
- Japan
- Prior art keywords
- puncture
- frame
- arm
- needle
- puncture needle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000011347 resin Substances 0.000 claims description 10
- 229920005989 resin Polymers 0.000 claims description 10
- 239000000463 material Substances 0.000 claims description 9
- 238000002591 computed tomography Methods 0.000 description 34
- 238000002594 fluoroscopy Methods 0.000 description 11
- 206010028980 Neoplasm Diseases 0.000 description 10
- 238000001574 biopsy Methods 0.000 description 6
- 230000008878 coupling Effects 0.000 description 5
- 238000010168 coupling process Methods 0.000 description 5
- 238000005859 coupling reaction Methods 0.000 description 5
- 210000001519 tissue Anatomy 0.000 description 5
- 238000001514 detection method Methods 0.000 description 4
- 238000002560 therapeutic procedure Methods 0.000 description 4
- 239000002184 metal Substances 0.000 description 2
- 239000007769 metal material Substances 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 230000000087 stabilizing effect Effects 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 210000000988 bone and bone Anatomy 0.000 description 1
- 238000000315 cryotherapy Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
Images










Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
- A61B90/11—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis with guides for needles or instruments, e.g. arcuate slides or ball joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/34—Trocars; Puncturing needles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1477—Needle-like probes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
- A61B2017/3405—Needle locating or guiding means using mechanical guide means
- A61B2017/3409—Needle locating or guiding means using mechanical guide means including needle or instrument drives
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/02—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by cooling, e.g. cryogenic techniques
- A61B2018/0293—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by cooling, e.g. cryogenic techniques using an instrument interstitially inserted into the body, e.g. needle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
- A61B2090/065—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension for measuring contact or contact pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/376—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy
- A61B2090/3762—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy using computed tomography systems [CT]
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Molecular Biology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- Robotics (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Physics & Mathematics (AREA)
- Plasma & Fusion (AREA)
- Otolaryngology (AREA)
- Manipulator (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Description
一方で、CTガントリ内に金属材料が存在すると、アーチファクトを引き起こしCT画像に悪影響を及ぼすため、針を回転させるための駆動モータやセンサを針の近傍に配置することはできない。
実施例1に係る穿刺ロボット1は、図1に示すように、ロボット本体10と、このロボット本体10が備える任意の方向に移動する移動端部20に装着される穿刺部30とを有するものである。穿刺部30は、ロボット本体10の手先部となる部分である。
なお、穿刺部30においては、図2、図3で示す両矢印方向を前後方向とする。
下側アーム52は、後述する平面視コ字状の下側連結体103と、下側左側中間片109と、下側右側中間片110と、第2センサ112と、下側先端アーム部130とから主に構成されている。下側アーム52は、上側アーム51がソケット53を支持する部分よりも穿刺針40の先端側を支持する。
なお、ソケットの形状は、本実施形態に限定するものではなく、各種穿刺針の形状に対応して適宜決定すればよい。
なお、第1センサ111と第2センサ112は、例えば、CTのガントリの近傍での作業時において、金属部材によるアーチファクトの発生を防ぐために、アーム部50においてCTのガントリ下に入らない位置に配置することが好ましい。加えて、上側アーム51及び下側アーム52を介して穿刺針40に生じる応力を精度よく検出するために、なるべく穿刺針40に近い位置に配置することが好ましい。
なお、穿刺針としては、本実施形態に限定するものではなく、例えば、ラジオ波治療用の穿刺針等のその他の用途の穿刺針であっても構わない。
次に、実施例2に係る穿刺ロボット1Aについて図を用いて説明する。
実施例2に係る穿刺ロボット1Aは、図7及び図8に示すように、ロボット本体10Aと、このロボット本体10Aが備える移動端部20Aに装着される穿刺部30Aとを有するものである。穿刺部30Aは、ロボット本体10Aの手先部となる部分である。
なお、穿刺部30Aにおいては、図9等で示す両矢印方向を前後方向とする。
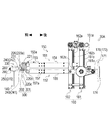
なお、図9等では、穿刺部30Aの詳細な構造を示すためにフレームカバー400、ベースカバー410を取り外した状態を図示している。
また、フレーム部160は、第3側壁167の上部に、第1傘歯車183を囲うように側面視矩形状の上部フレーム部169を有している。
下側アーム152は、平面視矩形状の下側アーム基部156と、この下側アーム基部156の前端に連結される平面視コ字状の下側アーム先端部157とから主に構成されている。下側アーム先端部157の先端には、センサ保持部153の前部下端側を回動自在に軸支する一対の軸支部157aを有している。
なお、上部センサ211と下部センサ212は、例えば、CTのガントリの近傍での作業時において、金属部材によるアーチファクトの発生を防ぐために、アーム部150においてCTのガントリ下に入らない位置に配置することが好ましい。加えて、上側アーム151及び下側アーム152を介して穿刺針140に生じる応力を精度よく検出するために、なるべく穿刺針140に近い位置に配置することが好ましい。
なお、穿刺針保持部280の形状は、本実施形態に限定するものではなく、各種穿刺針の形状に対応して適宜決定すればよい。また、穿刺針保持部280は、左側針把持アーム260及び右側針把持アーム270と別体ではなく、左側針把持アーム260及び右側針把持アーム270と一体的に形成してもよい。
なお、穿刺針としては、本実施形態に限定するものではなく、例えば、ラジオ波治療用の穿刺針等のその他の用途の穿刺針であっても構わない。
30、30A 穿刺部
40、140 穿刺針
50、150 アーム部
51、151 上側アーム
52、152 下側アーム
60、160 フレーム部
61、161 第1フレーム
62、162 第2フレーム
63、163 連結桿
64、164 進退軸
70、170 ベース部
220 エアシリンダ(アクチュータ)
Claims (8)
- ロボット本体と、このロボット本体が備えた任意の方向に移動する移動端部に装着した穿刺部とを有する穿刺ロボットにおいて、
前記穿刺部は、
先端に穿刺針を装着したアーム部と、
このアーム部の基端を装着したフレーム部と、
このフレーム部を支持するベース部と
を備え、
前記フレーム部は、矩形枠状であって内側に上下方向に延伸させた進退軸をそれぞれ設けた第1フレーム及び第2フレームと、この第1フレームと第2フレームとを互いに対向させて連結する連結桿とを備え、
前記アーム部は、前記穿刺針の基端側を支持する上側アームと、この上側アームよりも前記穿刺針の先端側を支持する下側アームとを備えて、前記進退軸と平行に前記穿刺針を装着し、
前記上側アームと前記下側アームとを前記進退軸に沿って進退移動させることで前記穿刺針を穿刺方向に進退移動させる穿刺ロボット。 - 前記上側アームの中途部に6軸力センサからなる第1センサを設けるとともに、前記下側アームの中途部に6軸力センサからなる第2センサを設ける請求項1に記載の穿刺ロボット。
- 前記上側アームと前記下側アームは、クランク状に屈曲させて、前記穿刺針を穿刺方向にオフセットしている請求項2に記載の穿刺ロボット。
- 前記上側アームと前記下側アームは、前記第1センサと前記第2センサよりも穿刺針側の部分を樹脂材料で形成している請求項2または請求項3に記載の穿刺ロボット。
- ロボット本体と、このロボット本体が備えた任意の方向に移動する移動端部に装着した穿刺部とを有する穿刺ロボットにおいて、
前記穿刺部は、
先端に穿刺針を装着したアーム部と、
このアーム部の基端を装着したフレーム部と、
このフレーム部を支持するベース部と
を備え、
前記アーム部は、センサを保持するセンサ保持部と、前記センサ保持部の上端側を支持する上側アームと、前記センサ保持部の下端側を支持する下側アームとを備え、
前記フレーム部は、矩形枠状であって内側に上下方向に延伸させた進退軸をそれぞれ設けた第1フレーム及び第2フレームと、この第1フレームと第2フレームとを互いに対向させて連結する連結桿とを備え、
前記アーム部は、前記進退軸と平行に前記穿刺針を装着するとともに、その中途部に前記穿刺針を穿刺方向に沿って進退するアクチュエータを備えて、
前記上側アームと前記下側アームとを前記進退軸に沿って進退移動させることで前記穿刺針を穿刺部位近傍に進退移動させ、
前記穿刺部位近傍における前記穿刺針の穿刺動作時に前記アクチュエータを瞬発的に駆動して前記穿刺部位に瞬発的に穿刺する穿刺ロボット。 - 前記アーム部の前記センサ保持部に6軸力センサからなる二つのセンサを積層して設ける請求項5に記載の穿刺ロボット。
- 前記アーム部は、先端に穿刺針を把持する針把持部を有し、前記針把持部は前記アーム部に対して着脱自在である請求項5または請求項6に記載の穿刺ロボット。
- 前記針把持部は、樹脂材料で形成している請求項5から請求項7のいずれか一項に記載の穿刺ロボット。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015202482 | 2015-10-13 | ||
| JP2015202482 | 2015-10-13 | ||
| PCT/JP2016/078920 WO2017065016A1 (ja) | 2015-10-13 | 2016-09-29 | 穿刺ロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2017065016A1 JPWO2017065016A1 (ja) | 2018-03-29 |
| JP6440177B2 true JP6440177B2 (ja) | 2018-12-19 |
Family
ID=58517516
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017506443A Active JP6440177B2 (ja) | 2015-10-13 | 2016-09-29 | 穿刺ロボット |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US11096751B2 (ja) |
| JP (1) | JP6440177B2 (ja) |
| WO (1) | WO2017065016A1 (ja) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2018207498A1 (ja) * | 2017-05-09 | 2020-05-14 | 国立大学法人 岡山大学 | 穿刺ロボット及び穿刺制御用プログラム |
| CN112120737A (zh) * | 2019-08-07 | 2020-12-25 | 杭州睿笛生物科技有限公司 | 一种电脉冲消融设备 |
| JP2021191382A (ja) * | 2020-06-05 | 2021-12-16 | 国立大学法人 岡山大学 | 穿刺針把持装置及びこの穿刺針把持装置を備えた穿刺ロボット |
| CN111643188B (zh) * | 2020-06-16 | 2024-07-30 | 上海交通大学 | 一种穿刺手术机器人装置 |
| CN112353461B (zh) * | 2020-10-08 | 2024-11-01 | 王洪奎 | Ct实时定位精准穿刺机器人 |
| CN112353495B (zh) * | 2020-10-29 | 2021-08-10 | 北京唯迈医疗设备有限公司 | 一种介入手术机器人手臂系统 |
| CN112220537B (zh) * | 2020-10-30 | 2024-06-07 | 北京大学深圳医院 | 肾内科用穿刺辅助装置 |
| CN112168309B (zh) * | 2020-11-10 | 2022-05-27 | 哈尔滨理工大学 | 一种基于双机械手爪的柔性针穿刺机构 |
| CN112568980A (zh) * | 2020-12-15 | 2021-03-30 | 航天科工智能机器人有限责任公司 | 一种适用于不同型号规格穿刺针的夹持装置 |
| CN113229939A (zh) * | 2021-04-29 | 2021-08-10 | 江苏众远智能装备有限公司 | 一种高精穿刺协作机器人及生产方法 |
| CN113349896B (zh) * | 2021-07-07 | 2022-08-02 | 北京精准医械科技有限公司 | 一种针穿刺机构及穿刺手术机器人 |
| CN113749739B (zh) * | 2021-08-20 | 2023-06-02 | 中国人民解放军总医院 | 一种用于骨肿瘤手术穿刺定位装置及其使用方法 |
| CN113662641B (zh) * | 2021-10-25 | 2022-02-22 | 北京微刀医疗科技有限公司 | Ct引导穿刺针输送装置 |
| CN114343794A (zh) * | 2021-12-04 | 2022-04-15 | 上海术航机器人有限公司 | 对准装置、系统、方法以及计算机设备、存储介质 |
| CN115517777A (zh) * | 2022-01-29 | 2022-12-27 | 深圳市爱博医疗机器人有限公司 | 一种介入手术机器人的从端动力座 |
| CN114431938A (zh) * | 2022-02-25 | 2022-05-06 | 上海睿触科技有限公司 | 一种新型的ct引导下穿刺辅助定位装置 |
| CN114515195B (zh) * | 2022-03-18 | 2023-09-15 | 华中科技大学同济医学院附属协和医院 | 一种肺穿刺手术机器人 |
| CN114668464B (zh) * | 2022-03-29 | 2024-05-28 | 哈尔滨理工大学 | 一种柔性针自动更换装置 |
| CN114469285B (zh) * | 2022-03-31 | 2022-07-22 | 真健康(北京)医疗科技有限公司 | 连杆式五自由度穿刺机器人 |
| CN114469283B (zh) * | 2022-03-31 | 2022-07-01 | 真健康(北京)医疗科技有限公司 | 连杆式四自由度穿刺针定位导向装置 |
| CN114711920B (zh) * | 2022-04-28 | 2024-08-23 | 哈尔滨理工大学 | 一种柔性针夹紧机构 |
| CN114939884B (zh) * | 2022-06-20 | 2024-11-05 | 深圳传世生物医疗有限公司 | 一种夹持装置及穿刺加液设备 |
| CN115590589A (zh) * | 2022-10-12 | 2023-01-13 | 上海交通大学(Cn) | 一种并联六自由度穿刺机器人 |
| CN115634025B (zh) * | 2022-12-23 | 2023-03-17 | 真健康(北京)医疗科技有限公司 | 用于机器人穿刺手术的自动穿刺装置 |
| CN117481766B (zh) * | 2024-01-02 | 2024-05-10 | 北京精准医械科技有限公司 | 一种消融针快速拆装夹持结构及其穿刺装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5397323A (en) * | 1992-10-30 | 1995-03-14 | International Business Machines Corporation | Remote center-of-motion robot for surgery |
| US5836869A (en) | 1994-12-13 | 1998-11-17 | Olympus Optical Co., Ltd. | Image tracking endoscope system |
| JPH08164148A (ja) * | 1994-12-13 | 1996-06-25 | Olympus Optical Co Ltd | 内視鏡下手術装置 |
| DE69918569T2 (de) * | 1998-11-23 | 2005-03-24 | Microdexterity Systems Inc., Memphis | Chirurgischer manipulator |
| US6702805B1 (en) * | 1999-11-12 | 2004-03-09 | Microdexterity Systems, Inc. | Manipulator |
| US7922688B2 (en) * | 2007-01-08 | 2011-04-12 | Restoration Robotics, Inc. | Automated delivery of a therapeutic or cosmetic substance to cutaneous, subcutaneous and intramuscular tissue regions |
| EP2148629B1 (en) * | 2007-04-16 | 2012-06-06 | NeuroArm Surgical, Ltd. | Frame mapping and force feedback methods, devices and systems |
| JP5921827B2 (ja) | 2011-06-30 | 2016-05-24 | 株式会社トップ | 硬膜外針穿刺システム |
| US9326822B2 (en) | 2013-03-14 | 2016-05-03 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| CA2926714C (en) | 2013-10-07 | 2022-08-02 | Technion Research & Development Foundation Ltd. | Gripper for robotic image guided needle insertion |
| US9974619B2 (en) * | 2015-02-11 | 2018-05-22 | Engineering Services Inc. | Surgical robot |
-
2016
- 2016-09-29 JP JP2017506443A patent/JP6440177B2/ja active Active
- 2016-09-29 WO PCT/JP2016/078920 patent/WO2017065016A1/ja active Application Filing
- 2016-09-29 US US15/767,855 patent/US11096751B2/en active Active
-
2021
- 2021-03-19 US US17/206,808 patent/US20210205038A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| US20180206926A1 (en) | 2018-07-26 |
| WO2017065016A1 (ja) | 2017-04-20 |
| JPWO2017065016A1 (ja) | 2018-03-29 |
| US20210205038A1 (en) | 2021-07-08 |
| US11096751B2 (en) | 2021-08-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6440177B2 (ja) | 穿刺ロボット | |
| RU2736213C2 (ru) | Устройство рентгеновской визуализации | |
| CN110856660B (zh) | 手术机器人及其穿刺机构 | |
| JP4303962B2 (ja) | 診断撮像介入装置 | |
| KR100945088B1 (ko) | 수술도구 위치 설정용 5자유도 매니퓰레이터 | |
| JP6823022B2 (ja) | 駆動部インターフェース | |
| CN109223066A (zh) | 一种腹腔镜固定遥控一体化系统 | |
| CN112603498A (zh) | 一种自动穿刺置针系统 | |
| CN113940733B (zh) | 一种ct兼容的肺部穿刺活检系统及方法 | |
| CN113940759B (zh) | 穿刺手术主控台及穿刺机器人 | |
| CN211534703U (zh) | 介入穿刺系统及具有其的诊疗设备 | |
| CN118453136A (zh) | 一种肝穿刺手术机器人 | |
| JP6839220B2 (ja) | 駆動部インターフェース、アダプタ、および駆動部インターフェースへの手術器具の装着検知方法 | |
| KR101196610B1 (ko) | 수술용 의료 기기 | |
| WO2007078027A1 (en) | Method for photographing using x-ray photographing apparatus | |
| JP5743684B2 (ja) | 放射線画像撮像装置及び放射線画像撮像装置の作動方法 | |
| CN211534705U (zh) | 介入穿刺系统及具有其的诊疗设备 | |
| CN211534701U (zh) | 介入穿刺系统及具有其的诊疗设备 | |
| JP3728437B2 (ja) | 閉鎖型の磁気共鳴断層撮影装置に使用するのためのマニピュレータ | |
| CN215778610U (zh) | 影像引导介入手术导航治疗设备 | |
| JP5864891B2 (ja) | 放射線画像撮影装置 | |
| JP2019532679A (ja) | 医療用アームアセンブリ | |
| CN211534700U (zh) | 介入穿刺系统及具有其的诊疗设备 | |
| CN210019550U (zh) | 一种穿刺活检定位装置 | |
| CN114145773A (zh) | 一种可使用不同体型儿童的脑部b超扫描架 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171108 |
|
| AA64 | Notification of invalidation of claim of internal priority (with term) |
Free format text: JAPANESE INTERMEDIATE CODE: A241764 Effective date: 20180116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180118 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180717 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180912 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181023 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181114 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6440177 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |