JP6438333B2 - 移動型x線撮影装置 - Google Patents
移動型x線撮影装置 Download PDFInfo
- Publication number
- JP6438333B2 JP6438333B2 JP2015060089A JP2015060089A JP6438333B2 JP 6438333 B2 JP6438333 B2 JP 6438333B2 JP 2015060089 A JP2015060089 A JP 2015060089A JP 2015060089 A JP2015060089 A JP 2015060089A JP 6438333 B2 JP6438333 B2 JP 6438333B2
- Authority
- JP
- Japan
- Prior art keywords
- arm
- imaging apparatus
- mobile
- ray
- ray imaging
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003384 imaging method Methods 0.000 claims description 106
- 230000007246 mechanism Effects 0.000 claims description 94
- 230000005484 gravity Effects 0.000 claims description 12
- 238000001514 detection method Methods 0.000 claims description 5
- 230000036544 posture Effects 0.000 description 23
- 230000001276 controlling effect Effects 0.000 description 5
- 238000000034 method Methods 0.000 description 5
- 238000004364 calculation method Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000005389 magnetism Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 241000270281 Coluber constrictor Species 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- OQZCSNDVOWYALR-UHFFFAOYSA-N flurochloridone Chemical compound FC(F)(F)C1=CC=CC(N2C(C(Cl)C(CCl)C2)=O)=C1 OQZCSNDVOWYALR-UHFFFAOYSA-N 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 230000001954 sterilising effect Effects 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
Images



















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/44—Constructional features of apparatus for radiation diagnosis
- A61B6/4405—Constructional features of apparatus for radiation diagnosis the apparatus being movable or portable, e.g. handheld or mounted on a trolley
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
- A61B6/547—Control of apparatus or devices for radiation diagnosis involving tracking of position of the device or parts of the device
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Engineering & Computer Science (AREA)
- Radiology & Medical Imaging (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Physics & Mathematics (AREA)
- High Energy & Nuclear Physics (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Description
本発明のその他の特徴及びその効果は、以下の実施形態において説明する。
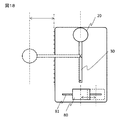
本実施形態の移動型X線撮影装置は、X線管部と、X線管部の駆動装置を収納する本体と、本体に設けられた車輪と、X線管部と本体とを連結するアーム部とを備え、アーム部は、折り畳み可能な複数のアームを有する。また本体は、折り畳んだ状態のアーム部を、本体表面より内側に収納する収納凹部を有する。
第一実施形態では、アーム部30を折りたたんで収納凹部11に収納した状態において、第一アーム31の本体との連結端部311が収納凹部11の下端にある場合を示したが、アーム部30を折りたたんだ時に、第一アーム31の端部311が収納凹部11の上端に位置するようにアーム部30を本体に連結することも可能である。
第一実施形態では、アーム部を構成するアームは固定した長さの部材からなるものであったが、アームに伸縮する機構を追加してもよい。
第一実施形態では、アーム部を2つのアームで構成したが、アームの数は2つに限定されない。
第一実施形態では、主としてX線撮影装置の構造を主として説明したが、本実施形態は、X線撮影装置の制御装置が、X線撮影装置を構成する機構を制御する機能を有することが特徴である。
本実施形態は、第一実施形態の構造を基本として、X線管の移動に伴ってX線撮影装置のバランスを取るためのバランス機構を配置したことが特徴である。バランス機構としては、錘(バランサー)と当該錘を水平方向にスライドさせる機構、車輪の垂直面に対する傾きを変更する機構、本体の傾きを変更する機構、などがあり、これらは単独でも組み合わせてもよい。
第三実施形態では、バランサーを用いてX線撮影装置の姿勢の安定化を図ったが、本実施形態では、装置自体の姿勢を異ならせて姿勢の安定化を図ることが特徴である。
Claims (15)
- X線管部と、前記X線管部の駆動装置を収納する本体と、前記本体に設けられた車輪と、前記X線管部と前記本体とを連結するアーム部とを備え、
前記アーム部は、第一アームと前記第一アームに対し折り畳み可能な第二アームとを含む、折り畳み可能な複数のアームを有し、
前記本体は、移動方向の前側に、折り畳んだ状態の前記アーム部を収納する収納凹部を有することを特徴とする移動型X線撮影装置。 - 請求項1に記載の移動型X線撮影装置であって、
前記アーム部は、一端が前記収納凹部にスライド可能に支持されていることを特徴とする移動型X線撮影装置。 - 請求項1に記載の移動型X線撮影装置であって、
前記第一アームは、一方の端部が前記本体に対しスライド可能に連結され、前記第二アームは、一方の端部に前記X線管部が固定されていることを特徴とする移動型X線撮影装置。 - 請求項3に記載の移動型X線撮影装置であって、
前記第一アームは、前記一方の端部に軸部を有し、
前記収納凹部は、前記軸部を前記収納凹部の長手方向に沿ってスライドするガイド部を有することを特徴とする移動型X線撮影装置。 - 請求項3に記載の移動型X線撮影装置であって、
前記第二アームの他方の端部は、前記第一アームの他方の端部に、前記第二アームの長手方向の軸を回転中心として回転可能に連結されていることを特徴とする移動型X線撮影装置。 - 請求項3に記載の移動型X線撮影装置であって、
前記第一アーム及び第二アームの少なくとも一方は、一方の端部から他方の端部までの長さを伸縮させる伸縮機構を備えることを特徴とする移動型X線撮影装置。 - 請求項1に記載の移動型X線撮影装置であって、
前記本体は、走行方向の前面に傾斜面を有し、前記傾斜面に前記収納凹部を有することを特徴とする移動型X線撮影装置。 - 請求項7に記載の移動型X線撮影装置であって、
前記傾斜面は、曲面を有し、前記アーム部を構成するアームは前記傾斜面の曲面に沿って湾曲していることを特徴とする移動型X線撮影装置。 - 請求項1に記載の移動型X線撮影装置であって、
前記アーム部の動きを制御する制御装置をさらに備えることを特徴とする移動型X線撮影装置。 - 請求項9に記載の移動型X線撮影装置であって、
前記X線管部の位置を検出する検出部をさらに備え、
前記制御装置は、前記検出部によって検出された前記X線管部の位置に基き、前記アーム部の動作を制御することを特徴とする移動型X線撮影装置。 - 請求項1に記載の移動型X線撮影装置であって、
前記アーム部の動きに連動して、前記移動型X線撮影装置の重心のバランスを調節するバランス機構をさらに備えることを特徴とする移動型X線撮影装置。 - 請求項11に記載の移動型X線撮影装置であって、
前記バランス機構は、錘と当該錘を水平方向にスライドさせる機構、前記車輪の垂直面に対する角度を変更する機構、及び、前記本体の傾きを変更する機構、のいずれか一つ以上を含むことを特徴とする移動型X線撮影装置。 - 請求項1に記載の移動型X線撮影装置であって
前記収納凹部に隣接或いは連続して、前記X線管部を収納するX線管収納部を有することを特徴とする移動型X線撮影装置。 - 請求項1に記載の移動型X線撮影装置であって、
前記移動型X線撮影装置とともに使用されるX線検出器を支持する支持枠をさらに備え、
前記収納凹部の両側に、前記支持枠を収納する溝部を有することを特徴とする移動型X線撮影装置。 - 請求項14に記載の移動型X線撮影装置であって、
前記支持枠は、前記溝部に沿ってスライド可能なリンク部材と、当該リンク部材に対し折り畳み可能な支持部材と、を有することを特徴とする移動型X線撮影装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015060089A JP6438333B2 (ja) | 2015-03-23 | 2015-03-23 | 移動型x線撮影装置 |
| PCT/JP2016/058572 WO2016152740A1 (ja) | 2015-03-23 | 2016-03-17 | 移動型x線撮影装置 |
| US15/544,526 US10506995B2 (en) | 2015-03-23 | 2016-03-17 | Mobile X-ray imaging device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015060089A JP6438333B2 (ja) | 2015-03-23 | 2015-03-23 | 移動型x線撮影装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016178993A JP2016178993A (ja) | 2016-10-13 |
| JP2016178993A5 JP2016178993A5 (ja) | 2017-03-16 |
| JP6438333B2 true JP6438333B2 (ja) | 2018-12-12 |
Family
ID=56978479
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015060089A Active JP6438333B2 (ja) | 2015-03-23 | 2015-03-23 | 移動型x線撮影装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10506995B2 (ja) |
| JP (1) | JP6438333B2 (ja) |
| WO (1) | WO2016152740A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6145899B2 (ja) * | 2015-07-16 | 2017-06-14 | 富士フイルム株式会社 | 放射線画像撮影装置 |
| EP3326532B1 (en) * | 2015-07-21 | 2020-01-01 | Fujifilm Corporation | Radiation exposure device, and control method and program for radiation exposure device |
| WO2017017949A1 (ja) * | 2015-07-27 | 2017-02-02 | 富士フイルム株式会社 | 放射線照射装置 |
| JP6134992B2 (ja) * | 2015-07-31 | 2017-05-31 | 富士フイルム株式会社 | 放射線照射装置 |
| JP6066247B1 (ja) * | 2015-11-26 | 2017-01-25 | 富士フイルム株式会社 | 放射線照射装置 |
| KR101833339B1 (ko) | 2016-03-17 | 2018-02-28 | 삼성전자주식회사 | 엑스선 장치, 및 그 제어방법 |
| EP3858242A1 (en) * | 2020-02-03 | 2021-08-04 | Koninklijke Philips N.V. | Cleaning and charging portable x-ray detectors |
| CN111150416A (zh) * | 2020-03-02 | 2020-05-15 | 上海钛米机器人科技有限公司 | 移动式数字x射线成像设备 |
| JP2022166346A (ja) | 2021-04-21 | 2022-11-02 | カシオ計算機株式会社 | 電子機器の支持装置、及び電子機器 |
| JP7472874B2 (ja) * | 2021-08-30 | 2024-04-23 | カシオ計算機株式会社 | 機器のスタンド |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4752948A (en) * | 1986-12-01 | 1988-06-21 | University Of Chicago | Mobile radiography alignment device |
| US4989229A (en) * | 1989-11-22 | 1991-01-29 | Picker International, Inc. | Counterbalance assembly for diagnostic imaging equipment |
| JPH0471538A (ja) * | 1990-07-13 | 1992-03-06 | Hitachi Medical Corp | 移動形x線装置 |
| FR2679124B1 (fr) | 1991-07-19 | 1993-11-19 | General Electric Cgr Sa | Mobile radiologique. |
| US5283823A (en) * | 1991-11-27 | 1994-02-01 | X-Cel X-Ray Corporation | Portable radiographic device |
| JPH0576406U (ja) * | 1992-03-26 | 1993-10-19 | 株式会社日立メディコ | 移動形x線装置 |
| JPH0576409U (ja) | 1992-03-26 | 1993-10-19 | 株式会社日立メディコ | 乳房x線撮影装置 |
| JP4549529B2 (ja) * | 1998-01-30 | 2010-09-22 | サイオス,インコーポレーテッド | ペプチドまたはタンパク質の制御放出送達 |
| JP2009201844A (ja) * | 2008-02-29 | 2009-09-10 | Toshiba Medical Supply Co Ltd | 移動式x線診断装置 |
| JP5917162B2 (ja) * | 2012-01-19 | 2016-05-11 | キヤノン株式会社 | X線撮影装置 |
| JP2014073321A (ja) * | 2012-10-05 | 2014-04-24 | Canon Inc | 移動型x線撮影装置 |
| JP2014138673A (ja) * | 2013-01-21 | 2014-07-31 | Canon Inc | 移動型x線撮影装置、移動型x線発生装置及びその制御方法 |
| JP5537718B1 (ja) * | 2013-08-29 | 2014-07-02 | 株式会社東芝 | 移動型x線診断装置 |
| JP6324009B2 (ja) * | 2013-09-12 | 2018-05-16 | キヤノン株式会社 | 放射線発生用装置及び放射線撮影装置 |
-
2015
- 2015-03-23 JP JP2015060089A patent/JP6438333B2/ja active Active
-
2016
- 2016-03-17 WO PCT/JP2016/058572 patent/WO2016152740A1/ja active Application Filing
- 2016-03-17 US US15/544,526 patent/US10506995B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2016152740A1 (ja) | 2016-09-29 |
| JP2016178993A (ja) | 2016-10-13 |
| US20170360386A1 (en) | 2017-12-21 |
| US10506995B2 (en) | 2019-12-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6438333B2 (ja) | 移動型x線撮影装置 | |
| JP6395650B2 (ja) | X線撮影装置 | |
| US9413961B2 (en) | Articulating display and control monitor device for a mobile radiographic machine | |
| EP2760341B1 (en) | An apparatus for producing x-ray images | |
| JP2016178993A5 (ja) | ||
| CN108882901B (zh) | 移动式放射线发生装置 | |
| JP6324009B2 (ja) | 放射線発生用装置及び放射線撮影装置 | |
| US9282940B2 (en) | Mobile X-ray imaging apparatus | |
| JP6145899B2 (ja) | 放射線画像撮影装置 | |
| WO2017175571A1 (ja) | 移動型放射線発生装置 | |
| JP6502493B2 (ja) | 放射線画像撮影装置 | |
| JP6400170B2 (ja) | 移動型x線画像撮影装置 | |
| WO2013145822A1 (ja) | 移動型x線装置および平板型検出器の取り出し方法 | |
| JP6440559B2 (ja) | 放射線発生用装置及び放射線撮影システム | |
| JP2017035167A (ja) | 移動型x線装置 | |
| JP2014073311A (ja) | 移動型のx線画像撮影装置 | |
| WO2017077652A1 (ja) | 移動型x線装置 | |
| JP6325638B2 (ja) | 移動型放射線発生装置 | |
| JP2014050482A (ja) | X線撮影装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170206 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171226 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180710 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180718 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181106 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181116 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6438333 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |