JP6433404B2 - モータ制御装置 - Google Patents
モータ制御装置 Download PDFInfo
- Publication number
- JP6433404B2 JP6433404B2 JP2015204291A JP2015204291A JP6433404B2 JP 6433404 B2 JP6433404 B2 JP 6433404B2 JP 2015204291 A JP2015204291 A JP 2015204291A JP 2015204291 A JP2015204291 A JP 2015204291A JP 6433404 B2 JP6433404 B2 JP 6433404B2
- Authority
- JP
- Japan
- Prior art keywords
- estimated
- magnetic pole
- speed
- pole position
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Landscapes
- Control Of Ac Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
より磁極位置が計算できる。
両センサレス制御の違いとしてはさらに次に示す脱調の有無がある。オブザーバ方式は電流推定誤差フィードバックによる推定速度情報の修正という構造上、速度推定には遅れが生じる。この遅れが顕著な場合、推定磁極位置と永久磁石同期モータ磁極位置との間にずれが生じる。このずれが多くなると推定磁極位置と永久磁石同期モータの磁極位置が同期しない脱調と呼ばれる状態となる。この脱調状態となると、オブザーバ方式が非脱調状態に復帰するのは困難である。しかし誘起電圧方式はフィードバック構造を持たないため、永久磁石同期モータ磁極位置あるいはモータ速度の急変時に瞬間的な磁極位置推定誤差が発生しても、オブザーバ方式とは異なり非脱調状態に復帰することが可能である。
一般にオブザーバ方式による第1の推定速度はモータ速度に対して特定の遅れ伝達特性を持つ。一方、誘起電圧方式による第2の推定速度は、永久磁石同期モータの誘起電圧波形から推定磁極位置を得て、推定磁極位置を微分することにより得るため、第1の推定速度とは、モータ速度に対する伝達特性が異なる。この伝達特性の違いは特に高周波数領域にて顕著である。ここで言う「周波数」とはモータ速度が含有する成分であり、高い加速度
にてモータが駆動されたり頻繁な加速と減速が実施される場合や高いジャーク(加速度の時間変化率)にてモータが駆動される場合に、モータ速度には高い周波数成分が多く含まれる。このときオブザーバの脱調(オブザーバ脱調ともいう)に至らないまでも、第1の推定速度と第2の推定速度に過渡的な差が生じる。前記第1と第2の推定速度の差でオブザーバ脱調を検知する場合は、その推定速度の差の大きさやその継続時間などの脱調検知基準を設けるが、第1と第2の推定速度の過渡的な差が発生するという原理上、モータ速度の軌跡により推定速度差の軌跡が異なるため、脱調の検知基準の設定に労力を要する課題があった。また所定のモータ速度軌跡で脱調検知基準を調整しても、異なったモータ速度軌跡ではそれが変化するため、オブザーバ脱調を誤って検知してしまう場合があった。誘起電圧方式では永久磁石同期モータの誘起電圧波形から推定磁極位置を得て、推定磁極位置を微分することにより推定速度を得る。元々誘起電圧波形は高周波電圧外乱の影響を受けやすくノイズを含んだ信号となる。さらに微分処理により高周波成分が増幅されるので、第1の推定速度と第2の推定速度を単純に比較すると、この場合もノイズにより非脱調状態にもかかわらず誤った脱調検知を行ってしまう場合があった。
を推定する推定器を備えたモータ制御装置であって、推定器は、モータモデルに基づくオ
ブザーバと適応同定器により永久磁石同期モータの推定速度と推定磁極位置とを求める第
1推定部と、モータ誘起電圧から永久磁石同期モータの推定速度と推定磁極位置とを求め
る第2推定部と、第1推定部の推定磁極位置および第2推定部の推定磁極位置、または第
2推定部の推定速度を用いて第1推定部の推定速度および推定磁極位置のリセットの判定
を行う判定・起動処理部を備え、判定・起動処理部は、第1推定部の推定磁極位置と第2推定部の推定磁極位置との差を用いて第1推定部の脱調を検知した場合、第2推定部の推定速度および推定磁極位置を用いて第1推定部の推定速度および推定磁極位置をリセットする判定を行うものである。
図1は本発明の実施の形態1を説明するブロック図であり、永久磁石同期モータの制御装置を示している。図1に示すモータ制御装置は、特に位置速度センサ情報に基づいて永久磁石同期モータの速度制御を行い、並行して前記位置速度センサの故障検知を実施する。さらに故障検知後にセンサレス制御に基づいて永久磁石同期モータの速度制御を継続する場合の永久磁石同期モータの制御装置の構成を示している。なお図1では永久磁石同期モータの制御装置だけではなく、永久磁石同期モータや位置速度センサ、速度指令を生成する上位のコントローラも示している。
また、電流制御器2は、電流制御部2a、座標変換器2b、2c、PWM処理部2dを有している。更に磁極位置・速度推定器6は、第1推定部6a、第2推定部6b、判定・起動処理部6cおよび機械速度換算部6dを備えている。
このような構成とすると、位置速度センサ400の故障時でも永久磁石同期モータ300の運転継続が可能となる。故障検知器9が発する故障検知信号22は上位コントローラ200にも送信され、モータ停止用の速度指令パターンが速度指令10として発生される。位置速度センサ400の故障検知は検出磁極位置19(θdet)と推定磁極位置20(θest)の比較により行う。例えば両者の差が所定値以上であり、その状態が所定時間以上継続したら故障と判定する方法がある。その他にも故障検知は位置速度センサ400の故障モードに応じて色々な方法があり、例えば位置速度センサ内部の論理信号の整合性から内部ロジック回路の異常判定を実施したり、インピーダンスの変化からケーブルの断線検知を行うなどがある。故障検知器9では前記の処理群をまとめて実施し位置速度センサ400の故障検知を行う。上記にて説明した、故障検知器9と信号切替器5の動作はセンサレス制御技術の応用例としてはよく知られた公知の技術となるため詳細な説明は省略する。
さらに第1推定速度6fを第2推定速度6hにて上書きする。リセット指示信号6iが発生している間は第1推定部6aではリセット処理が継続される。このとき第1推定磁極位置6eや第1推定速度6fは第2推定部6bからの情報で上書きされるため、第1推定部6a内のオブザーバや適応同定器の働きは停止する。
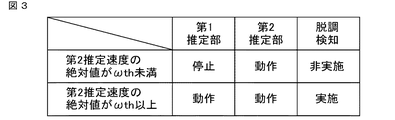
また、推定磁極位置20(θest)は第2推定磁極位置6gと等しくなる。推定速度21(ωest)は第2推定速度6hと等しくなる。第2推定速度6hの絶対値が所定値(閾値)ωth未満ではリセット処理を継続し続ける(ステップS202)。なお、ステップS202においてリセット指示が出された場合、ステップS206においてモータ運転が終了しているか否かを判断し、モータ運転が終了していなければステップS201に戻り、モータ運転が終了しておれば処理を終了する。
さらに、第1推定磁極位置6eを第2推定磁極位置6gの差を監視し、両者の差の絶対値θerが所定の閾値θerth以上か否かを判断し(ステップS203)、絶対値θerが所定の閾値θerth以上であり、それが時間Tth以上継続した場合に(ステップS204)、第1推定部6aのオブザーバが脱調したものとして、判定・起動処理部6cは、リセット指示信号6iを出力する(ステップS205)。ステップS205においてリセット指示が出された場合、ステップS206においてモータ運転が終了しているか否かを判断し、モータ運転が終了していなければステップS201に戻り、モータ運転が終了しておれば処理を終了する。

式(6)により得られた推定速度6f(ωest1)を積分器6a5で積分することで推定磁極位置6e(θest1)が得られる。オブザーバ方式のセンサレス制御では電流推定誤差ΔId,ΔIqはオブザーバ6a1に内包されるモータ速度情報に誤りがあるため発生するという原理に基づいて処理ループが構成されるので、推定速度6f(ωest1)はオブザーバ6a1にもフィードバックされる。式(4)に示すオブザーバ処理を行うオブザーバ6a1や適応同定器6a2について、それらの構成やフィードバックゲインの設計はまた一つの技術分野が形成されており、また本発明の本質ではないので詳細な説明は省略する。ただし上述したように本質的にフィードバックによる推定機構であるため速度推定や磁極位置推定応答に限界があり、脱調という問題が発生する。
第2推定部6bは下記の式(7)に示す永久磁石同期モータの2相静止座標上の回路方程式に基づく。誘起電圧計算部6b1で計算される誘起電圧Eα、Eβは下記の式(8)となる。
更に、第2推定部はフィードバック構造を持たないため、永久磁石同期モータが停止状態から起動する際にも、外部の情報を必要とせず推定磁極位置や推定速度を出力することが可能である。このため、第2推定部からの推定情報を用いることで、第1推定部のオブザーバを起動して、適切な故障検知や滑らかな停止制御処理が実現できる。
本発明の実施の形態2について説明する。モータ制御装置内部の電流制御器2が次に説明するような条件では、本発明の構成は特に有効である。インバータ3は図1に記載した電流制御器2におけるPWM処理部2dからスイッチング指令14を受けて動作し、その結果、永久磁石同期モータ300には矩形波状の電圧が印加される。この矩形波状の電圧には永久磁石同期モータを駆動する成分の他にPWMリプル成分が含まれる。これによりモータを流れる電流にはPWM起因のリプルが含まれる。スイッチング指令14は電圧指令12とキャリア波の大小比較にて生成される。キャリア波は三角波が選択されることが極めて多い。電流制御器2が電流センサ4からの検出電流(信号)13を取り込む場合,所定の周期でサンプリングを実施するが、前記の電流リプルが電流サンプリング値に含まれることを回避するために、三角波の山タイミングまたは谷タイミングに同期して電流サンプリングが実施される。ところが場合によっては、電流制御器2の動作が三角波の山・谷タイミングに同期しなかったり、三角波よりも高速に動作する場合がある。このとき検出電流13には多くの電流リプルが含まれる。またこの電流リプルをキャンセルすべく電流制御器2の電流制御部2aが動作するので電圧指令12も脈動する。このため磁極位置・速度推定器6にも、電圧指令12と検出電流13を介してPWM起因の外乱信号が多量に入力される。ここで第2推定部6bにおける磁極位置推定の過程においては、式(11)から明らかなように電流の微分が含まれる。また第2推定速度ωest2も第2推定磁極位置θest2の微分で導出されるため、第2推定速度ωest2には多くの外乱成分が含まれる。図7は、第2推定速度がPWM起因の電流リプルにより脈動する例を示している。図7はその動作例であり、キャリア周波数4.5kHz、電流制御器2の動作周期を100kHzとした場合の結果である。電流制御器2は三角波よりも早い周期で動作し、かつその山谷に同期していない。このため前記のプロセスにより、第2推定速度ωest2はモータ速度が一定にもかかわらず脈動しており、第1推定速度ωest1と第2推定速度ωest2も脈動が顕著であり、これに基づくと脱調の誤検知の可能性がある。しかし第1推定磁極位置θest1と第2推定磁極位置θest2の差は0.5[rad]以下に保たれており、同磁極位置の差より脱調検知を行い、実施の形態1にて説明したような脱調検知の閾値とすると、誤検知を防止することができる。
次に本発明の実施の形態3について説明する。図8は実施の形態3におけるモータ制御装置の構成を示している。
実施の形態1では図1に記載したモータ制御装置内の特定の機能を持った各構成要素が連携して動作し、課題の解決を図るものとして説明したが、プロセッサ上で実行されるプログラムの信号処理とプロセッサ上に設けられた論理回路における信号処理の結果、機能が実現される構成としてもよい。図8はその構成図であり、図中のプロセッサ23はプログラムを記憶装置24より読み出して、実行する。またプロセッサ23は、その処理の過程で一時的に記憶すべき情報を書き込んだり読み出しを行う。
機能が実現される構成としても実施の形態1で示すような効果が得られる。
Claims (3)
- 永久磁石同期モータの回転子速度と磁極位置を推定する推定器を備えたモータ制御装置であって、前記推定器は、モータモデルに基づくオブザーバと適応同定器により永久磁石同期モータの推定速度と推定磁極位置とを求める第1推定部と、モータ誘起電圧から永久磁石同期モータの推定速度と推定磁極位置とを求める第2推定部と、前記第1推定部の推定磁極位置および前記第2推定部の推定磁極位置、ならびに前記第2推定部の推定速度の少なくとも何れかを用いて前記第1推定部の推定速度および推定磁極位置のリセットの判定を行う判定・起動処理部を備え、前記判定・起動処理部は、前記第1推定部の推定磁極位置と前記第2推定部の推定磁極位置との差を用いて前記第1推定部の脱調を検知した場合、前記第2推定部の推定速度および推定磁極位置を用いて前記第1推定部の推定速度および推定磁極位置をリセットする判定を行うことを特徴とするモータ制御装置。
- 前記判定・起動処理部は、前記第2推定部の推定速度の絶対値が予め定められた値以上となった場合に、前記第1推定部の推定磁極位置と前記第2推定部の推定磁極位置との差を用いて前記第1推定部の脱調を検知することを特徴とする請求項1に記載のモータ制御装置。
- 前記判定・起動処理部は、前記第2推定部の推定速度の絶対値が予め定められた値未満の場合に、前記第2推定部の推定速度および推定磁極位置を用いて前記第1推定部の推定速度および推定磁極位置をリセットする判定を行い前記第1推定部を起動させることを特徴とする請求項1または請求項2に記載のモータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015204291A JP6433404B2 (ja) | 2015-10-16 | 2015-10-16 | モータ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015204291A JP6433404B2 (ja) | 2015-10-16 | 2015-10-16 | モータ制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017077122A JP2017077122A (ja) | 2017-04-20 |
| JP2017077122A5 JP2017077122A5 (ja) | 2017-11-30 |
| JP6433404B2 true JP6433404B2 (ja) | 2018-12-05 |
Family
ID=58551620
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015204291A Active JP6433404B2 (ja) | 2015-10-16 | 2015-10-16 | モータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6433404B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6541926B2 (ja) * | 2017-05-02 | 2019-07-10 | 三菱電機株式会社 | 電動機制御装置 |
| CN107748497B (zh) * | 2017-09-28 | 2019-10-15 | 中国科学院长春光学精密机械与物理研究所 | 运动控制系统的模型辨识和参数设计方法及系统 |
| JP2019097268A (ja) * | 2017-11-20 | 2019-06-20 | 株式会社安川電機 | モータ制御装置およびモータ制御方法 |
| CN108011554B (zh) * | 2017-12-25 | 2020-12-22 | 成都信息工程大学 | 永磁同步电机无速度传感器自适应转速跟踪控制系统及其设计方法 |
| JP6805197B2 (ja) * | 2018-03-01 | 2020-12-23 | 株式会社東芝 | モータ制御用集積回路 |
| JP7226228B2 (ja) * | 2019-09-27 | 2023-02-21 | 株式会社デンソー | 回転機制御装置 |
| JP7404040B2 (ja) | 2019-11-22 | 2023-12-25 | キヤノン株式会社 | モータ制御装置およびモータ制御装置の制御方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3565124B2 (ja) * | 2000-01-12 | 2004-09-15 | トヨタ自動車株式会社 | 同期モータの脱調を判定する装置および方法 |
| JP4230443B2 (ja) * | 2004-11-22 | 2009-02-25 | 三菱電機株式会社 | 同期電動機の駆動装置 |
| JP2008220169A (ja) * | 2008-06-13 | 2008-09-18 | Sanyo Electric Co Ltd | モータ制御装置 |
| US20160233804A1 (en) * | 2013-10-22 | 2016-08-11 | Mitsubishi Electric Corporation | Motor control device |
-
2015
- 2015-10-16 JP JP2015204291A patent/JP6433404B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017077122A (ja) | 2017-04-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6433404B2 (ja) | モータ制御装置 | |
| JP5782449B2 (ja) | Pmsmの制御装置 | |
| JP6220941B2 (ja) | 誘導電動機のパラメータ推定方法 | |
| JP5124483B2 (ja) | 同期機を駆動するための方法および装置 | |
| JP2019533409A (ja) | 同期モータを始動させるためのシステム及び方法 | |
| TWI587622B (zh) | Drive system and inverter device | |
| RU2664782C1 (ru) | Устройство управления для вращающейся машины переменного тока | |
| JP2002335699A (ja) | 交流モータの制御装置 | |
| WO2016035298A1 (ja) | モータ駆動装置およびブラシレスモータ | |
| JP2007282389A (ja) | モータ制御装置 | |
| WO2010137133A1 (ja) | 同期電動機の磁極位置推定装置 | |
| JP2008220096A (ja) | 同期電動機のセンサレス制御装置 | |
| SG183623A1 (en) | Method and apparatus for estimating rotor angle and rotor speed of synchronous reluctance motor at start-up | |
| US7405534B2 (en) | Apparatus and method for controlling velocity of motor | |
| De Viaene et al. | Load angle estimation for dynamic stepping motor motion applications | |
| JPH09191698A (ja) | 永久磁石形同期電動機の速度推定方法及びその回転子ずれ角推定方法並びに回転子位置修正方法 | |
| JP2010041868A (ja) | 同期電動機のロータ回転監視装置および制御システム | |
| JP5743344B2 (ja) | 同期電動機の制御装置 | |
| JP2008220169A (ja) | モータ制御装置 | |
| JP4735439B2 (ja) | 永久磁石式同期電動機の初期磁極位置推定装置 | |
| JP3797508B2 (ja) | 永久磁石型同期電動機のセンサレス速度制御方法及びその脱調検出方法 | |
| JP6537461B2 (ja) | 回転機の制御装置 | |
| JPWO2012011155A1 (ja) | 交流回転機の制御装置および制御方法 | |
| JP4449419B2 (ja) | 同期電動機の制御装置 | |
| JP4061446B2 (ja) | 同期電動機の抵抗値同定方法とその制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171020 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171020 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180817 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180828 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181004 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181009 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181106 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6433404 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |