JP6414498B2 - 差動型磁気センサ - Google Patents
差動型磁気センサ Download PDFInfo
- Publication number
- JP6414498B2 JP6414498B2 JP2015066524A JP2015066524A JP6414498B2 JP 6414498 B2 JP6414498 B2 JP 6414498B2 JP 2015066524 A JP2015066524 A JP 2015066524A JP 2015066524 A JP2015066524 A JP 2015066524A JP 6414498 B2 JP6414498 B2 JP 6414498B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- magnetic field
- differential
- detection
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/063—Magneto-impedance sensors; Nanocristallin sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N50/00—Galvanomagnetic devices
- H10N50/80—Constructional details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/0023—Electronic aspects, e.g. circuits for stimulation, evaluation, control; Treating the measured signals; calibration
- G01R33/0029—Treating the measured signals, e.g. removing offset or noise
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/0023—Electronic aspects, e.g. circuits for stimulation, evaluation, control; Treating the measured signals; calibration
- G01R33/0041—Electronic aspects, e.g. circuits for stimulation, evaluation, control; Treating the measured signals; calibration using feed-back or modulation techniques
Description
すなわち、前記した通り、差動型磁気センサで鉄粉等の局所的な微小磁場を測定しようとすると、2つの磁気インピーダンス素子の検出感度をほぼ一致させる必要があるが、実際には、製造上のばらつき等により、同じ検出感度の磁気インピーダンス素子を提供しようとしても、結果的に検出感度に差が生じてしまう場合がある。本発明では、このような場合でも信号調整手段を設けて、前記検出感度の差に応じて駆動電流または信号処理手段の利得が調整されることにより、局所的な微小磁場を精度良く測定可能とすることができる。
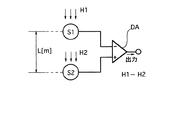
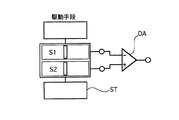
駆動電流を出力する駆動手段と、離れた2つの地点に配設された前記駆動電流が印加される2つの感磁体より成る2つの磁気インピーダンス素子を備え、前記感磁体の周辺の磁場強さに対応する磁場信号電圧を出力する2つの磁気検知手段と、
前記2つの磁気検知手段から出力される2つの磁場信号電圧の差を演算することにより、前記2つの地点の磁場の強さの差の信号を出力する差動演算手段とから成る差動型磁気センサにおいて、
前記駆動手段と前記差動演算手段との間に設けられ、検出感度の異なる前記2つの磁気インピーダンス素子を備えた前記2つの磁気検知手段が、前記感磁体の周辺の磁場強さが同じであれば同じレベルの磁場信号電圧を出力するように前記2つの磁気インピーダンス素子の異なる検出感度に応じて出力信号を調整する信号調整手段を備え、
互いに磁気インピーダンス素子の検出感度が略同じであると見做せるような出力信号を調整するようにして、前記2つの地点共通の背景磁場成分を相殺して、該背景磁場成分に比べて微弱な磁場を検出するように構成されている
ものである。
前記第1発明において、
前記信号調整手段として、前記2つの磁気インピーダンス素子を構成する前記感磁体の検出感度の差異に対応して、前記駆動手段から供給される前記駆動電流が調整されるように構成されているものである。
前記第1発明において、
前記信号調整手段として、前記2つの磁気インピーダンスセンサを構成する前記感磁体の検出感度の差異に対応して、前記2つの磁気インピーダンス素子に接続される前記磁気検知手段を構成する信号処理手段の利得が調整されるように構成されているものである。
前記アモルファスワイヤ11、21と前記検出コイル12、22からなる磁気インピーダンス素子E10、E20は、それぞれ製造過程においてばらつきが発生するので、磁気インピーダンス素子として組上げたときには、互いに検出感度における差を持つおそれがある。
k1≠k2
H0×k1≠H0×k2
H0×k1×i11=H0×k2×i21
k1×i11=k2×i21
i11=Ed/(r11+w11)
i21=Ed/(r21+w21)
r21=k2/k1(r11+w11)−w21
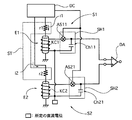
前記駆動回路2において、電子スイッチDSはその制御端子が、前記パルス発振回路10の前記パルスP1を出力する出力端10Aに接続され、接点が開閉制御される。該電子スイッチDSの一方の接点電極は、前記電圧源Eに接続され、もう一方の接点電極は前記アモルファスワイヤ11、21に直列接続された抵抗器 r11、 r21にそれぞれ接続されていることから、これにより前記パルスP1のオンオフに対応して前記アモルファスワイヤ11、21に対して、それぞれパルス電流i11、i21が通電される。
該緩衝増幅器A11、A21の各出力端子P11、P21から出力される出力は、前記磁場H1とH2に対応し、かつ、両者の検出感度が同じと見做せるような出力に調整された出力となっている。
i11=Ed/(r12+ra+w11)
i21=Ed/(r22+rb+w21)
rb=k2/k1(r11+ra+w11)−(r21+w21)
r11/(r11+r12)および
r21/(r21+r22)である。
k1×r11/(r11+r12)=k2×r21/(r21+r22)
r22=(k2×r21)/(k1×r11)×(r11+r12)−r21
なお前記抵抗器 r11、r12、r21、r22として可変抵抗器を採用することもできる。
t1=(r11+r12)×Ch1≒r11×Ch1 ∵ r11≫r12
t2=(r21+r22)×Ch2≒r21×Ch2 ∵r21≫r22
上記放電時定数t1、t2がこの周期Tと同じか、それよりも大、すなわち以下の数15を満足するものであれば、サンプルホールドされたホールドコンデンサの電圧、すなわち検出した磁場信号を次の新たなサンプルホールドのタイミングまで所定の正確さで保持することができる。
t1、t2 ≥ T
t1=r11×Ch1=300×103×100×10−12=30×10−6=30μs
t2=r21×Ch2=300×103×100×10−12=30×10−6=30μs
なお第3実施例と同様に前記抵抗器r11、r12、r21、r22として可変抵抗器を採用することができる。
(1+ r14/ r13)
(1+ r24/ r23)
k1×(1+r14/r13)=k2×(1+r24/r23)
r24=r23/k2×(k2−k1−k1×r14/r13)
なお前記抵抗器 r13、r14、r23、r24を可変抵抗器によって構成することができる。
すなわち2つの磁気検知手段の2つの磁気インピーダンスセンサ素子の距離を30mmとし、一方をベルトコンベアーにより通過する直径0.3mmの鉄粉の通過路近傍上部に、配設するとともに、もう一方をそれよりも上部にずらして配設して、計測を行ったものである。
aの波形には鉄粉通過の微弱な磁気信号が含まれているが、ノイズとなる背景磁場成分がa、bともに最大で約80nT程度あるため、そのままでは微小な鉄粉通過時の磁気信号が、背景磁場成分に隠れてしまい、明確には視認できない。cは、前記差動演算器A35の差動演算の出力であり、差動演算効果により両出力の背景ノイズが約1/400に小さくなるとともにピーク値1.2nTの鉄粉通過による磁場変動波形を観察することができた。なお、cの波形は、磁場変動を見やすくするため、a、bに比べて縦軸のスケールを拡大して表示したものである。
なお、上記の計測実験では、地磁気が直流磁場であることを考慮し、低周波を除去するフィルタを用いて測定結果に影響が及ばないようにし、実験を行っている。
10 パルス発振回路
2 駆動回路
3 信号調整手段
5 差動演算手段
12、22 検出コイル
41、42 サンプルホールド回路
Claims (3)
- 駆動電流を出力する駆動手段と、離れた2つの地点に配設された前記駆動電流が印加される2つの感磁体より成る2つの磁気インピーダンス素子を備え、前記感磁体の周辺の磁場強さに対応する磁場信号電圧を出力する2つの磁気検知手段と、
前記2つの磁気検知手段から出力される2つの磁場信号電圧の差を演算することにより、前記2つの地点の磁場の強さの差の信号を出力する差動演算手段とから成る差動型磁気センサにおいて、
前記駆動手段と前記差動演算手段との間に設けられ、検出感度の異なる前記2つの磁気インピーダンス素子を備えた前記2つの磁気検知手段が、前記感磁体の周辺の磁場強さが同じであれば同じレベルの磁場信号電圧を出力するように前記2つの磁気インピーダンス素子の異なる検出感度に応じて出力信号を調整する信号調整手段を備え、
互いに磁気インピーダンス素子の検出感度が略同じであると見做せるような出力信号を調整するようにして、前記2つの地点共通の背景磁場成分を相殺して、該背景磁場成分に比べて微弱な磁場を検出するように構成されている
ことを特徴とする差動型磁気センサ。 - 前記請求項1において、
前記信号調整手段が、前記2つの磁気インピーダンス素子を構成する前記感磁体の検出感度の差異に対応して、前記駆動手段から供給される前記駆動電流が調整されるように構成されていることを特徴とする差動型磁気センサ。 - 前記請求項1において、
前記信号調整手段が、前記2つの磁気インピーダンス素子を構成する前記感磁体の検出感度の差異に対応して、前記2つの磁気インピーダンス素子に接続される前記磁気検知手段を構成する信号処理手段の利得が調整されるように構成されていることを特徴とする差動型磁気センサ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015066524A JP6414498B2 (ja) | 2015-03-27 | 2015-03-27 | 差動型磁気センサ |
| US15/561,744 US10509080B2 (en) | 2015-03-27 | 2016-02-23 | Differential type magnetic sensor |
| EP16771980.6A EP3264122B1 (en) | 2015-03-27 | 2016-02-23 | Differential magnetic sensor |
| PCT/JP2016/055247 WO2016158096A1 (ja) | 2015-03-27 | 2016-02-23 | 差動型磁気センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015066524A JP6414498B2 (ja) | 2015-03-27 | 2015-03-27 | 差動型磁気センサ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016186451A JP2016186451A (ja) | 2016-10-27 |
| JP2016186451A5 JP2016186451A5 (ja) | 2017-08-03 |
| JP6414498B2 true JP6414498B2 (ja) | 2018-10-31 |
Family
ID=57004157
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015066524A Ceased JP6414498B2 (ja) | 2015-03-27 | 2015-03-27 | 差動型磁気センサ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10509080B2 (ja) |
| EP (1) | EP3264122B1 (ja) |
| JP (1) | JP6414498B2 (ja) |
| WO (1) | WO2016158096A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6661570B2 (ja) * | 2017-05-11 | 2020-03-11 | 矢崎総業株式会社 | 磁界検出センサ |
| JP6965815B2 (ja) * | 2018-04-12 | 2021-11-10 | 愛知製鋼株式会社 | マーカ検出システム、及びマーカ検出システムの運用方法 |
| JP7213622B2 (ja) * | 2018-04-12 | 2023-01-27 | 愛知製鋼株式会社 | 磁気計測システム、及び磁気センサの校正方法 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2260589A (en) * | 1939-07-24 | 1941-10-28 | George S Smith | Magnetic flux meter |
| JPS59202057A (ja) * | 1983-04-30 | 1984-11-15 | Shimadzu Corp | 磁気探傷方法 |
| JP2566687B2 (ja) | 1991-03-27 | 1996-12-25 | 株式会社クボタ | トルク測定装置の温度補償装置 |
| JPH0980132A (ja) | 1995-09-18 | 1997-03-28 | Kokusai Denshin Denwa Co Ltd <Kdd> | 差動型交流磁気センサ |
| DE19615254C2 (de) * | 1996-04-18 | 1999-03-11 | Diagnostikforschung Inst | Gerät zur höchstempfindlichen magnetischen Detektion von Analyten |
| JPH1152036A (ja) * | 1997-08-04 | 1999-02-26 | Murata Mfg Co Ltd | 磁界検出素子の感度校正方法およびその感度校正方法を用いる磁界検出素子の感度校正装置 |
| US6229307B1 (en) * | 1998-08-12 | 2001-05-08 | Minebea Co., Ltd. | Magnetic sensor |
| JP2000098009A (ja) * | 1998-09-24 | 2000-04-07 | Koyo Electronics Ind Co Ltd | 磁気検出センサ |
| JP2002071770A (ja) * | 2000-08-31 | 2002-03-12 | Aichi Steel Works Ltd | 磁場検出装置 |
| DE10224747B4 (de) * | 2002-06-04 | 2004-05-13 | Infineon Technologies Ag | Sensorschaltung und Verfahren zur Herstellung derselben |
| JP2004301545A (ja) | 2003-03-28 | 2004-10-28 | Seiko Instruments Inc | 高分解能差動型磁気センサ及びその駆動装置 |
| WO2005033717A1 (en) * | 2003-10-01 | 2005-04-14 | Eaton Corporation | Magnetic flux concentrator current sensing topology |
| EP2562550B1 (en) * | 2010-03-26 | 2019-02-13 | Canon Denshi Kabushiki Kaisha | Method for detecting magnetic field generated by a current to estimate the amount of current |
| US20120249126A1 (en) | 2011-03-31 | 2012-10-04 | Allegro Microsystems, Inc. | Circuits and methods for motion detection |
| JP2014190774A (ja) | 2013-03-26 | 2014-10-06 | Nagoya Univ | 磁気計測装置 |
| JP6163874B2 (ja) * | 2013-05-23 | 2017-07-19 | 株式会社リコー | 回転角度検出装置、画像処理装置及び回転角度検出方法 |
-
2015
- 2015-03-27 JP JP2015066524A patent/JP6414498B2/ja not_active Ceased
-
2016
- 2016-02-23 EP EP16771980.6A patent/EP3264122B1/en active Active
- 2016-02-23 US US15/561,744 patent/US10509080B2/en active Active
- 2016-02-23 WO PCT/JP2016/055247 patent/WO2016158096A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| EP3264122A4 (en) | 2018-12-05 |
| EP3264122A1 (en) | 2018-01-03 |
| WO2016158096A1 (ja) | 2016-10-06 |
| US20180106872A1 (en) | 2018-04-19 |
| JP2016186451A (ja) | 2016-10-27 |
| EP3264122B1 (en) | 2020-04-01 |
| US10509080B2 (en) | 2019-12-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5924503B2 (ja) | 磁気検出器 | |
| KR100566547B1 (ko) | 자기검출기 | |
| JP5815519B2 (ja) | 高速応答を有する広ダイナミックレンジ電位計 | |
| Devices | Analog Devices | |
| JP6414498B2 (ja) | 差動型磁気センサ | |
| JP5116433B2 (ja) | 変動磁場検出用磁気検出器 | |
| CN104246517B (zh) | 具有罗果夫斯基类型的电流换能器的用于测量电流的装置 | |
| JP2011528109A (ja) | 流動媒体の導電率を誘電測定する入力回路 | |
| CN103235189A (zh) | 一种基于双电流电压比率法的微电阻高精度测量方法及实现该方法的测量系统 | |
| EP3185030A1 (en) | On-line calibration and compensation of a current transformer | |
| JP2017062122A (ja) | 磁界検出装置 | |
| JP5811210B2 (ja) | 磁気検出器 | |
| JP2014089087A (ja) | オフセットキャンセル回路 | |
| JP2009186433A (ja) | 渦電流式試料測定方法と、渦電流センサと、渦電流式試料測定システム | |
| US9372217B2 (en) | Cable detector | |
| JP4961623B2 (ja) | 磁気センサ | |
| CN106932736B (zh) | 使用宽带信号的闭环设备校准 | |
| EP3255445B1 (en) | Magneto-impedance (mi) magnetic sensor | |
| EP2230523B1 (en) | Physical quantity measuring unit and device for measuring a voltage and an electric field | |
| CN105224003A (zh) | 集成电路 | |
| EP3574334B1 (en) | A magnetic field sensor | |
| JP6952986B2 (ja) | 勾配磁界センサ | |
| RU2229141C1 (ru) | Измеритель параметров двухполюсников | |
| JP6460079B2 (ja) | Mi磁気センサ | |
| JP2020183878A (ja) | 高速高感度磁気センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170208 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20170208 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170622 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180131 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20180302 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180905 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180918 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6414498 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| RVOP | Cancellation by post-grant opposition |