JP6355835B2 - 電動パワーステアリング制御装置および電動パワーステアリング制御方法 - Google Patents
電動パワーステアリング制御装置および電動パワーステアリング制御方法 Download PDFInfo
- Publication number
- JP6355835B2 JP6355835B2 JP2017516229A JP2017516229A JP6355835B2 JP 6355835 B2 JP6355835 B2 JP 6355835B2 JP 2017516229 A JP2017516229 A JP 2017516229A JP 2017516229 A JP2017516229 A JP 2017516229A JP 6355835 B2 JP6355835 B2 JP 6355835B2
- Authority
- JP
- Japan
- Prior art keywords
- axis current
- command value
- current command
- limit value
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/22—Current control, e.g. using a current control loop
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/02—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to vehicle speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/08—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to driver input torque
- B62D6/10—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to driver input torque characterised by means for sensing or determining torque
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/0085—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation specially adapted for high speeds, e.g. above nominal speed
- H02P21/0089—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation specially adapted for high speeds, e.g. above nominal speed using field weakening
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation
- H02P27/12—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation pulsing by guiding the flux vector, current vector or voltage vector on a circle or a closed curve, e.g. for direct torque control
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/032—Preventing damage to the motor, e.g. setting individual current limits for different drive conditions
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/60—Controlling or determining the temperature of the motor or of the drive
- H02P29/68—Controlling or determining the temperature of the motor or of the drive based on the temperature of a drive component or a semiconductor component
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Description
図5は、従来の電動パワーステアリング制御装置におけるモータ回転数に対するd軸電流指令値、およびモータ回転数に対するアシストトルクの最大値の関係を示した図である。モータの逆起電力が電源電圧を超える所定のモータ回転数N1以上では、アシストトルクの最大値が低下する問題がある。この問題に対して、従来の電動パワーステアリング制御装置は、弱め界磁制御を行っている。具体的には、従来の電動パワーステアリング制御装置は、モータ回転数に基づくd軸電流指令値を出力し、アシストトルクの最大値が低下することを緩和する制御を行っている。
図1は、本発明の実施の形態1における電動パワーステアリング制御装置の全体構成図である。より具体的には、この図1に示す電動パワーステアリング制御装置は、制御を司るために車両に装着された主制御器10(以下、ECU10と称す)、ハンドルの操舵力をアシストするモータ1、ハンドル付近に搭載され操舵トルクを検出するトルクセンサ2、車速を検出する車速センサ3、モータ1の回転角度を検出するレゾルバセンサ4、ECU10の雰囲気温度を検出する温度センサ5を備えて構成されている。

(手順1)dq変換電流制限値Idq_LIMにより、d軸電流指令値Idとq軸電流指令値Iqが、例えば過熱保護制限のように、なんらかの制限を受けた場合には、まず、上式(1)、(2)に従って、制限後d軸電流指令値Id’を算出する。
(手順2)次に、dq変換電流制限値Idq_LIMの範囲内で、上式(3)、(4)に従って、制限後q軸電流指令値Iq’を算出する。
・半円21:dq変換電流制限値Idq_LIMが、dq変換電流指令値の定格値Idq_MAXであるときの半円
・半円22:電流制限によりdq変換電流制限値Idq_LIMが、半円21よりも小さい値に制限されたときの半円
・直線23:d軸電流制限値Id_LIMが、d軸電流指令値の定格値Id_MAXであるときの制限値
・直線24:d軸電流制限値Id_LIMが、電流制限により、直線23よりも低下したときの制限値
・d軸ベクトル32:合成ベクトル31に対応するd軸成分としての、制限後d軸電流指令値Id’を示すベクトル
・q軸ベクトル33:合成ベクトル31に対応するq軸成分としての、制限後q軸電流指令値Iq’を示すベクトル
・d軸ベクトル42:合成ベクトル41に対応するd軸成分としての、制限後d軸電流指令値Id’を示すベクトル
・q軸ベクトル43:合成ベクトル41に対応するq軸成分としての、制限後q軸電流指令値Iq’を示すベクトル
・合成ベクトル51:q軸電流指令値とd軸電流指令値を合成したdq変換電流指令値Idq*であり、ベクトルの大きさが、半円22によるdq変換電流制限値に等しいときの合成ベクトル
・d軸ベクトル52:合成ベクトル51に対応するd軸成分としての、制限後d軸電流指令値Id’を示すベクトル
・q軸ベクトル53:合成ベクトル51に対応するq軸成分としての、制限後q軸電流指令値Iq’を示すベクトル
Claims (5)
- ステアリングホイールの操舵を補助する交流モータを駆動させるためのモータ電流を、d軸電流指令値とq軸電流指令値に基づいて制御する主制御器を備えた電動パワーステアリング制御装置において、
前記主制御器は、前記d軸電流指令値と前記q軸電流指令値の二乗和の平方根であるdq変換電流指令値に制限がかかった場合に、
前記dq変換電流指令値の制限値であるdq変換電流制限値に基づいてd軸電流制限値を優先して算出し、前記d軸電流指令値を前記d軸電流制限値以下にクリップすることで制限後のd軸電流指令値を算出するd軸電流制限器と、
前記dq変換電流制限値と前記d軸電流制限器によって算出された前記制限後のd軸電流指令値とに基づいてq軸電流制限値を算出し、前記q軸電流指令値を前記q軸電流制限値以下にクリップすることで制限後のq軸電流指令値を算出するq軸電流制限器と、
前記制限後のd軸電流指令値と前記制限後のq軸電流指令値に基づいて前記モータ電流を制御するインバータ制御器と
を備える電動パワーステアリング制御装置。 - 前記d軸電流制限器は、
d軸電流定格値をId_MAX、
dq変換電流定格値をIdq_MAX、
前記dq変換電流制限値をIdq_LIM、
前記d軸電流制限値をId_LIM、
とした場合に、前記d軸電流制限値を下式
Id_LIM=Id_MAX
×(Idq_LIM/Idq_MAX)
を用いて算出する
請求項1に記載の電動パワーステアリング制御装置。 - 前記q軸電流制限器は、
前記d軸電流制限器で算出された前記制限後のd軸電流指令値をId’
前記dq変換電流制限値をIdq_LIM、
前記q軸電流制限値をIq_LIM、
とした場合に、前記q軸電流制限値を下式
Iq_LIM=√{(Idq_LIM)2−(Id’)2}
を用いて算出する
請求項1または2に記載の電動パワーステアリング制御装置。 - 前記主制御器は、
前記主制御器の雰囲気温度を計測する温度センサと、
前記温度センサにより計測された前記雰囲気温度に基づいて、過熱保護を図るための前記dq変換電流制限値を決定する制限値演算器と
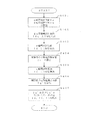
をさらに備える請求項1から3のいずれか1項に記載の電動パワーステアリング制御装置。 - ステアリングホイールの操舵を補助する交流モータを駆動させるためのモータ電流を、d軸電流指令値とq軸電流指令値に基づいて制御する主制御器によって実行される電動パワーステアリング制御方法であって、
前記d軸電流指令値と前記q軸電流指令値の二乗和の平方根であるdq変換電流指令値に制限がかかった場合に、前記主制御器において、
前記dq変換電流指令値の制限値であるdq変換電流制限値を取得する第1ステップと、
前記第1ステップにより取得した前記dq変換電流制限値に基づいてd軸電流制限値を優先して算出する第2ステップと、
前記d軸電流指令値を、前記第2ステップで算出した前記d軸電流制限値以下にクリップすることで制限後のd軸電流指令値を算出する第3ステップと、
前記第1ステップで取得した前記dq変換電流制限値と、前記第3ステップで算出した前記制限後のd軸電流指令値とに基づいて、q軸電流制限値を算出する第4ステップと、
前記q軸電流指令値を、前記第4ステップで算出した前記q軸電流制限値以下にクリップすることで制限後のq軸電流指令値を算出する第5ステップと、
前記第3ステップで算出した前記制限後のd軸電流指令値と、前記第5ステップで算出した前記制限後のq軸電流指令値とに基づいて、前記モータ電流を制御する第6ステップと
を有する電動パワーステアリング制御方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/063061 WO2016178262A1 (ja) | 2015-05-01 | 2015-05-01 | 電動パワーステアリング制御装置および電動パワーステアリング制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2016178262A1 JPWO2016178262A1 (ja) | 2017-08-31 |
| JP6355835B2 true JP6355835B2 (ja) | 2018-07-11 |
Family
ID=57218537
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017516229A Active JP6355835B2 (ja) | 2015-05-01 | 2015-05-01 | 電動パワーステアリング制御装置および電動パワーステアリング制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10536102B2 (ja) |
| EP (1) | EP3290296B1 (ja) |
| JP (1) | JP6355835B2 (ja) |
| CN (1) | CN107531277B (ja) |
| WO (1) | WO2016178262A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020043631A (ja) * | 2018-09-06 | 2020-03-19 | 株式会社日立産機システム | 同期電動機制御装置 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6445937B2 (ja) * | 2015-07-03 | 2018-12-26 | 日立オートモティブシステムズ株式会社 | 電動パワーステアリング装置 |
| CN110366818B (zh) * | 2017-03-01 | 2023-05-12 | 松下知识产权经营株式会社 | 机器人的控制方法 |
| JP6737222B2 (ja) * | 2017-04-14 | 2020-08-05 | 株式会社デンソー | ステアリング制御装置 |
| EP3667900B1 (en) * | 2018-10-19 | 2022-02-16 | NSK Ltd. | Motor control device, electric actuator product, and electric power steering device |
| US10972033B2 (en) | 2018-10-19 | 2021-04-06 | Nsk Ltd. | Motor control device, electrically driven actuator product, and electrically driven power steering device |
| US11101764B2 (en) * | 2019-11-14 | 2021-08-24 | Steering Solutions Ip Holding Corporation | Dynamic control of source current in electric motor drive systems |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3534722B2 (ja) * | 2001-08-07 | 2004-06-07 | ファナック株式会社 | モータの制御装置 |
| JP4455075B2 (ja) | 2004-01-28 | 2010-04-21 | 三菱電機株式会社 | モータ制御装置 |
| JP4641179B2 (ja) * | 2004-11-25 | 2011-03-02 | 川崎重工業株式会社 | 同期モータの制御方法および制御装置 |
| EP1860766B1 (en) * | 2005-03-17 | 2015-10-28 | Nsk Ltd. | Electric power steering device control method and apparatus |
| JP2008086138A (ja) * | 2006-09-28 | 2008-04-10 | Yaskawa Electric Corp | 同期電動機制御装置とその制御方法 |
| JP5224032B2 (ja) * | 2008-01-25 | 2013-07-03 | 株式会社ジェイテクト | 操舵制御装置 |
| JP5200628B2 (ja) * | 2008-03-31 | 2013-06-05 | 株式会社ジェイテクト | モータ制御装置および電動パワーステアリング装置 |
| JP5453729B2 (ja) * | 2008-04-14 | 2014-03-26 | 株式会社ジェイテクト | モータ制御装置および電動パワーステアリング装置 |
| JP5712098B2 (ja) | 2011-09-27 | 2015-05-07 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| CN103988419B (zh) * | 2011-12-09 | 2016-03-23 | 松下电器产业株式会社 | 电动机控制装置 |
| US9000694B2 (en) * | 2012-03-23 | 2015-04-07 | Fanuc Corporation | Synchronous motor control apparatus |
| JP5920067B2 (ja) * | 2012-07-06 | 2016-05-18 | 株式会社島津製作所 | モータ制御装置 |
| JP6032143B2 (ja) * | 2013-07-12 | 2016-11-24 | 株式会社デンソー | 回転機の制御装置 |
-
2015
- 2015-05-01 WO PCT/JP2015/063061 patent/WO2016178262A1/ja active Application Filing
- 2015-05-01 EP EP15891269.1A patent/EP3290296B1/en active Active
- 2015-05-01 CN CN201580079172.5A patent/CN107531277B/zh active Active
- 2015-05-01 US US15/569,150 patent/US10536102B2/en active Active
- 2015-05-01 JP JP2017516229A patent/JP6355835B2/ja active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020043631A (ja) * | 2018-09-06 | 2020-03-19 | 株式会社日立産機システム | 同期電動機制御装置 |
| JP7029368B2 (ja) | 2018-09-06 | 2022-03-03 | 株式会社日立産機システム | 同期電動機制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2016178262A1 (ja) | 2017-08-31 |
| EP3290296A4 (en) | 2019-01-23 |
| EP3290296A1 (en) | 2018-03-07 |
| US20180145622A1 (en) | 2018-05-24 |
| WO2016178262A1 (ja) | 2016-11-10 |
| CN107531277B (zh) | 2020-05-19 |
| EP3290296B1 (en) | 2019-11-27 |
| CN107531277A (zh) | 2018-01-02 |
| US10536102B2 (en) | 2020-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6355835B2 (ja) | 電動パワーステアリング制御装置および電動パワーステアリング制御方法 | |
| JP5550672B2 (ja) | モータ制御装置 | |
| JP6260502B2 (ja) | モータ制御装置 | |
| JP6137086B2 (ja) | 回転電機制御装置 | |
| JP4797565B2 (ja) | モータ駆動制御装置 | |
| JP5267848B2 (ja) | モータ制御装置 | |
| JP2018057166A (ja) | モータ制御装置およびこれを用いた電動パワーステアリング装置 | |
| US11597431B2 (en) | Motor control device | |
| JP6436005B2 (ja) | 回転電機制御装置 | |
| US20200252015A1 (en) | Motor controller and electric power steering device having same | |
| JP5351002B2 (ja) | モータ制御装置 | |
| JP6059285B2 (ja) | 誘導電動機制御装置 | |
| JP6698943B2 (ja) | 電動機の制御装置、及び、電動パワーステアリングシステム | |
| JP6394885B2 (ja) | 電動パワーステアリング装置 | |
| JP5595436B2 (ja) | モータ制御装置 | |
| JP6677362B1 (ja) | モータ制御装置、電動アクチュエータ製品及び電動パワーステアリング装置 | |
| JP5610002B2 (ja) | 電動機の制御装置 | |
| JP2008086138A (ja) | 同期電動機制御装置とその制御方法 | |
| CN111344947B (zh) | 电动机控制装置、电动致动器产品以及电动助力转向装置 | |
| JP5595437B2 (ja) | モータ制御装置 | |
| JP7271954B2 (ja) | モータ制御装置 | |
| JP5538657B2 (ja) | モータ制御装置 | |
| JP2009022074A (ja) | モータ制御装置 | |
| JP2015154689A (ja) | 回転電機のインバータ制御装置 | |
| JP2008236853A (ja) | 回転機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170411 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180515 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180612 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6355835 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |