JP6351900B2 - ロボット制御装置 - Google Patents
ロボット制御装置 Download PDFInfo
- Publication number
- JP6351900B2 JP6351900B2 JP2018502444A JP2018502444A JP6351900B2 JP 6351900 B2 JP6351900 B2 JP 6351900B2 JP 2018502444 A JP2018502444 A JP 2018502444A JP 2018502444 A JP2018502444 A JP 2018502444A JP 6351900 B2 JP6351900 B2 JP 6351900B2
- Authority
- JP
- Japan
- Prior art keywords
- robot
- work
- work area
- worker
- operator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1674—Programme controls characterised by safety, monitoring, diagnostic
- B25J9/1676—Avoiding collision or forbidden zones
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1694—Programme controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/088—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices with position, velocity or acceleration sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/06—Safety devices
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40202—Human robot coexistence
Description
図1は、本発明の実施の形態1にかかるロボット制御装置1を備えるロボットシステム及び該ロボットシステムが適用される作業現場の一例を示す模式図である。図1に示すロボット制御装置1は、ロボット2に接続され、ロボット関節角度計測装置3からのロボット関節角信号3a及び作業工程指定装置5からの作業工程指定信号5aをもとに、ロボット2に対して動作指令を出力する。また、図1に示す作業現場には、作業台6が配され、作業者7が存在し、ロボット2は作業者7と作業空間を共有して動作する。
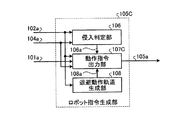
本実施の形態においては、ロボット制御装置内のロボット指令生成部がロボット2を作業領域から退避させるように動作する形態について説明する。図5は、本実施の形態にかかるロボット制御装置1Aの一構成例を示すブロック図である。図5に示すロボット制御装置1Aは、図2に示すロボット指令生成部105に代えてロボット指令生成部105Aを備える。
本実施の形態においては、ロボットが作業者の現在の作業工程の次の作業領域から予め退避するように動作する形態について説明する。
図10は、本実施の形態にかかるロボット制御装置1Cを備えるロボットシステム及び該ロボットシステムが適用される作業現場の一例を示す模式図である。図10に示すロボットシステムでは、図1に示すロボットシステムに対して作業者計測装置4が追加されている。図10では、図1に示す構成と同様の構成については同一符号を付してその説明を省略する。
本実施の形態においては、作業者状態情報101aが作業領域設定部に入力される形態について説明する。図14は、本実施の形態にかかるロボット制御装置1Dの一構成例を示すブロック図である。なお、図14では、図11に示す構成と同様の構成については同一符号を付してその説明を省略する。図14に示すロボット制御装置1Dは、図11に示すロボット制御装置1Cの作業領域設定部104に代えて作業領域設定部104Dを備える。
本実施の形態においては、動作指令105aがロボット制御状態計測部に入力される形態について説明する。図16は、本実施の形態にかかるロボット制御装置1Eの一構成例を示すブロック図である。図16に示すロボット制御装置1Eは、図2に示すロボット制御装置1のロボット制御状態計測部102に代えてロボット制御状態計測部102Eを備える。ロボット制御状態計測部102Eには、ロボット関節角信号3aに代えて動作指令105aが入力される。
安全柵、11 侵入検知装置、12 現作業工程予定経路、13 次作業工程予定経路、14 現作業領域、15 次作業領域、81,82,83,84,85 作業対象物、101 作業者計測部、101a 作業者状態情報、102,102E ロボット制御状態計測部、102a ロボット制御状態情報、104,104B,104D 作業領域設定部、104a 作業領域情報、104b 次作業領域情報、105,105A,105B,105C ロボット指令生成部、105a 動作指令、106 侵入判定部、106a 侵入判定信号、107,107A,107C 動作指令出力部、108 退避動作軌道生成部、108a 退避動作軌道情報、109 作業領域記憶部、109a 修正用作業領域情報、110 作業領域修正部、110a 修正作業領域情報、111 作業領域出力部、701 頭部、702 頸部、703 肩部、704 脊柱部、705 臀部、706 膝部、707 足首部、708 肘部、709 手首部、710 手先部、711 足先部、721,722,723,724,725,726,727,728,729,730 骨部。
Claims (7)
- 予め作業内容が設定された一つ以上の作業工程を行う作業者と作業空間を共有して動作するロボットを制御するロボット制御装置であって、
前記ロボットの位置及び姿勢であるロボット制御状態を計測するロボット制御状態計測部と、
前記作業工程の開始から終了までを通して、前記作業者の作業動作で、前記作業者の身体が占有する空間を包含した領域を示すデータを作業工程毎に予め記憶し、前記データと前記作業者が現在行っている前記作業工程を指定する作業工程指定信号とに基づき、前記作業者の現在の作業工程に対応した作業領域を設定する作業領域設定部と、
前記作業領域及び前記ロボット制御状態をもとに前記ロボットへの動作指令を生成するロボット指令生成部とを備え、
前記ロボット指令生成部は、前記ロボットが前記作業領域内に存在するか否かによって、前記ロボットへの動作指令を変更することを特徴とするロボット制御装置。 - 前記ロボット指令生成部は、前記ロボットが前記作業領域内に存在する場合は、前記ロボットへの動作指令を、前記ロボットが前記作業領域外に退避するように出力することを特徴とする請求項1に記載のロボット制御装置。
- 予め作業内容が設定された一つ以上の作業工程を行う作業者と作業空間を共有して動作するロボットを制御するロボット制御装置であって、
前記ロボットの位置及び姿勢であるロボット制御状態を計測するロボット制御状態計測部と、
前記作業工程の開始から終了までの前記作業者の作業動作で、前記作業者の身体が占有する空間を包含した領域を作業工程毎に記憶し、前記作業者が現在行っている前記作業工程を指定する作業工程指定信号に基づき、前記作業者の現在の作業工程に対応した作業領域を設定する作業領域設定部と、
前記作業領域及び前記ロボット制御状態をもとに前記ロボットへの動作指令を生成するロボット指令生成部とを備え、
前記ロボット指令生成部は、前記ロボットが前記作業領域内に存在するか否かによって、前記ロボットへの動作指令を変更し、
前記作業領域設定部は、作業工程における前記作業領域に加え次の作業工程の順番を合わせて記憶しており、現在の前記作業者の作業工程に対応した前記作業領域に加え、現在の作業工程から次の工程先の作業工程に対応した次作業領域を設定し、
前記ロボット指令生成部は、前記ロボットが前記作業領域内に侵入している場合と、前記作業領域内に侵入しておらず、前記次作業領域内に侵入している場合で、前記作業領域及び前記次作業領域からの退避方法を変更することを特徴とするロボット制御装置。 - 前記ロボット指令生成部は、前記ロボットが前記作業領域内に侵入しておらず、前記次作業領域内に侵入している場合に、前記作業領域内に侵入しない範囲で前記次作業領域外に退避することを特徴とする請求項3に記載のロボット制御装置。
- 予め作業内容が設定された一つ以上の作業工程を行う作業者と作業空間を共有して動作するロボットを制御するロボット制御装置であって、
前記作業者の位置及び姿勢である作業者状態を計測する作業者計測部と、
前記ロボットの位置及び姿勢であるロボット制御状態を計測するロボット制御状態計測部と、
前記作業工程の開始から終了までを通して、前記作業者の作業動作で、前記作業者の身体が占有する空間を包含した領域を示すデータを作業領域として予め記憶し、前記データと前記作業者が現在行っている前記作業工程を指定する作業工程指定信号とに基づき、前記作業者の現在の作業工程に対応した前記作業領域を設定する作業領域設定部と、
前記作業領域と前記作業者状態と前記ロボット制御状態をもとに前記ロボットへの動作指令を生成するロボット指令生成部とを備え、
前記ロボット指令生成部は、前記ロボットが前記作業領域に侵入しているか否かの判定により前記ロボットへの動作指令を変更することを特徴とするロボット制御装置。 - 前記作業領域設定部は、作業領域修正部を備え、
前記作業領域修正部は、前記作業工程指定信号により指定された前記作業工程に対応した前記作業領域と、前記作業者計測部から入力された前記作業者状態をもとに記憶されている前記作業領域を修正することを特徴とする請求項5に記載のロボット制御装置。 - 前記ロボット制御状態計測部は、前記ロボット指令生成部から出力される前記ロボットへの動作指令をもとに前記ロボット制御状態を計測することを特徴とする請求項1から請求項6のいずれか一項に記載のロボット制御装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016105489 | 2016-05-26 | ||
| JP2016105489 | 2016-05-26 | ||
| PCT/JP2017/017012 WO2017203937A1 (ja) | 2016-05-26 | 2017-04-28 | ロボット制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2017203937A1 JPWO2017203937A1 (ja) | 2018-06-07 |
| JP6351900B2 true JP6351900B2 (ja) | 2018-07-04 |
Family
ID=60411153
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018502444A Active JP6351900B2 (ja) | 2016-05-26 | 2017-04-28 | ロボット制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11045955B2 (ja) |
| JP (1) | JP6351900B2 (ja) |
| CN (1) | CN109153134B (ja) |
| DE (1) | DE112017002639T5 (ja) |
| WO (1) | WO2017203937A1 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11518051B2 (en) | 2017-02-07 | 2022-12-06 | Veo Robotics, Inc. | Dynamic, interactive signaling of safety-related conditions in a monitored environment |
| US11040450B2 (en) | 2017-02-07 | 2021-06-22 | Veo Robotics, Inc. | Dynamically determining and monitoring workspace safe zones using semantic representations of workpieces |
| US11820025B2 (en) | 2017-02-07 | 2023-11-21 | Veo Robotics, Inc. | Safe motion planning for machinery operation |
| US11541543B2 (en) | 2017-02-07 | 2023-01-03 | Veo Robotics, Inc. | Dynamic, interactive signaling of safety-related conditions in a monitored environment |
| JP6487489B2 (ja) | 2017-05-11 | 2019-03-20 | ファナック株式会社 | ロボット制御装置及びロボット制御プログラム |
| EP3528077B2 (en) * | 2018-02-16 | 2023-11-01 | Pilz GmbH & Co. KG | System for safeguarding a person from an autonomously operating machine |
| JP2020095617A (ja) * | 2018-12-14 | 2020-06-18 | コニカミノルタ株式会社 | 安全管理支援システム、および制御プログラム |
| JP6997068B2 (ja) | 2018-12-19 | 2022-01-17 | ファナック株式会社 | ロボット制御装置、ロボット制御システム、及びロボット制御方法 |
| JP7156397B2 (ja) * | 2018-12-28 | 2022-10-19 | 京セラドキュメントソリューションズ株式会社 | 制御装置 |
| JP7127592B2 (ja) * | 2019-03-27 | 2022-08-30 | オムロン株式会社 | 報知システム |
| JP7036078B2 (ja) * | 2019-03-28 | 2022-03-15 | オムロン株式会社 | 制御システム、制御方法、および制御ユニット |
| JP7384602B2 (ja) * | 2019-09-12 | 2023-11-21 | ファナック株式会社 | ロボット制御装置 |
| JP7414972B2 (ja) * | 2020-04-27 | 2024-01-16 | ファナック株式会社 | 組立システム |
| CA3117643A1 (en) * | 2020-05-12 | 2021-11-12 | Soremartec S.A. | Operating device |
| US11738956B2 (en) * | 2021-01-26 | 2023-08-29 | Target Brands, Inc. | Door and light curtain control system for depalletization systems and methods |
Family Cites Families (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004243427A (ja) * | 2003-02-12 | 2004-09-02 | Yaskawa Electric Corp | ロボット制御装置およびロボット制御方法 |
| JP4219870B2 (ja) * | 2004-08-09 | 2009-02-04 | 本田技研工業株式会社 | マン・マシン作業システム |
| DE102004041821A1 (de) * | 2004-08-27 | 2006-03-16 | Abb Research Ltd. | Vorrichtung und Verfahren zur Sicherung eines maschinell gesteuerten Handhabungsgerätes |
| JP3927994B2 (ja) * | 2004-10-19 | 2007-06-13 | 松下電器産業株式会社 | ロボット装置 |
| JP5035768B2 (ja) * | 2006-04-18 | 2012-09-26 | 独立行政法人産業技術総合研究所 | 人間ロボット共存作業用安全装置 |
| DE102007028390A1 (de) * | 2007-06-15 | 2008-12-18 | Abb Research Ltd. | Prozesssteuerung, System und Verfahren zur automatisierten Anpassung von Prozessparametern wenigstens einer Handhabungsvorrichtung |
| CN102229148B (zh) * | 2007-06-27 | 2013-10-16 | 松下电器产业株式会社 | 机器手控制装置及控制方法、机器人 |
| JP2010120139A (ja) | 2008-11-21 | 2010-06-03 | New Industry Research Organization | 産業用ロボットの安全制御装置 |
| JP4648486B2 (ja) * | 2009-01-26 | 2011-03-09 | ファナック株式会社 | 人間とロボットとの協調動作領域を有する生産システム |
| US8415609B2 (en) * | 2009-01-31 | 2013-04-09 | Keyence Corporation | Safety photoelectric switch |
| KR101686517B1 (ko) | 2009-05-22 | 2016-12-14 | 도요타지도샤 히가시니혼 가부시키가이샤 | 작업 지원 로봇 시스템 |
| WO2011021375A1 (ja) * | 2009-08-21 | 2011-02-24 | パナソニック株式会社 | ロボットアームの制御装置及び制御方法、組立ロボット、ロボットアームの制御プログラム、及び、ロボットアームの制御用集積電子回路 |
| WO2011036865A1 (ja) * | 2009-09-28 | 2011-03-31 | パナソニック株式会社 | ロボットアームの制御装置及び制御方法、ロボット、ロボットアームの制御プログラム、及び、ロボットアーム制御用集積電子回路 |
| DE102010063214A1 (de) * | 2010-12-16 | 2012-06-21 | Robert Bosch Gmbh | Sicherungseinrichtung für eine Handhabungsvorrichtung, insbesondere einen Industrieroboter, sowie Verfahren zum Betreiben der Sicherungseinrichtung |
| ITTO20110994A1 (it) * | 2011-10-31 | 2013-05-01 | Comau Spa | Metodo per il controllo di almeno due robot aventi rispettivi spazi di lavoro includenti almeno una regione in comune |
| JP5717033B2 (ja) | 2012-07-19 | 2015-05-13 | トヨタ自動車東日本株式会社 | 作業支援システム |
| US9043025B2 (en) * | 2012-08-31 | 2015-05-26 | Rethink Robotics, Inc. | Systems and methods for safe robot operation |
| DE102012108716A1 (de) * | 2012-09-17 | 2014-03-20 | Klingelnberg Ag | Schleuse zur Bauteilhandhabung in einer Maschine sowie Verfahren zur Handhabung |
| JP5949473B2 (ja) | 2012-11-09 | 2016-07-06 | トヨタ自動車株式会社 | ロボット制御装置、ロボット制御方法、およびロボット |
| JP5549724B2 (ja) * | 2012-11-12 | 2014-07-16 | 株式会社安川電機 | ロボットシステム |
| US9427871B2 (en) * | 2013-05-06 | 2016-08-30 | Abb Technology Ag | Human safety provision in mobile automation environments |
| JP6229324B2 (ja) * | 2013-06-14 | 2017-11-15 | セイコーエプソン株式会社 | ロボット、ロボット制御装置およびロボットの制御方法 |
| JP2015000470A (ja) * | 2013-06-18 | 2015-01-05 | トヨタ自動車株式会社 | ロボット制御装置及びロボット制御方法 |
| DE202013105036U1 (de) * | 2013-11-08 | 2015-02-10 | Daimler Ag | Erfassungseinrichtung |
| US9452532B2 (en) * | 2014-01-27 | 2016-09-27 | Panasonic Intellectual Property Management Co., Ltd. | Robot, device and method for controlling robot, and computer-readable non-transitory recording medium |
| JP6397226B2 (ja) * | 2014-06-05 | 2018-09-26 | キヤノン株式会社 | 装置、装置の制御方法およびプログラム |
| PL3017920T3 (pl) * | 2014-11-07 | 2018-02-28 | Comau S.P.A. | Robot przemysłowy i sposób sterowania robotem przemysłowym |
| DE102014222857A1 (de) * | 2014-11-10 | 2016-05-12 | Kuka Roboter Gmbh | Flexibles taktzeitoptimiertes Teilen eines Arbeitsraums für Roboter |
| WO2016103308A1 (ja) * | 2014-12-26 | 2016-06-30 | 川崎重工業株式会社 | ロボットシステム |
| JP6055002B2 (ja) * | 2015-02-20 | 2016-12-27 | ファナック株式会社 | ロボットを退避動作させる人間協調ロボットシステム |
| CN109219856A (zh) * | 2016-03-24 | 2019-01-15 | 宝利根 T·R 有限公司 | 用于人类及机器人协作的系统及方法 |
| CN107717982B (zh) * | 2016-08-12 | 2020-09-25 | 财团法人工业技术研究院 | 机械手臂的控制装置及操作方法 |
-
2017
- 2017-04-28 US US16/097,858 patent/US11045955B2/en active Active
- 2017-04-28 WO PCT/JP2017/017012 patent/WO2017203937A1/ja active Application Filing
- 2017-04-28 JP JP2018502444A patent/JP6351900B2/ja active Active
- 2017-04-28 CN CN201780031483.3A patent/CN109153134B/zh active Active
- 2017-04-28 DE DE112017002639.3T patent/DE112017002639T5/de active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| DE112017002639T5 (de) | 2019-03-28 |
| JPWO2017203937A1 (ja) | 2018-06-07 |
| US11045955B2 (en) | 2021-06-29 |
| WO2017203937A1 (ja) | 2017-11-30 |
| US20190134819A1 (en) | 2019-05-09 |
| CN109153134B (zh) | 2021-08-13 |
| CN109153134A (zh) | 2019-01-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6351900B2 (ja) | ロボット制御装置 | |
| CN108568815B (zh) | 机器人系统和机器人控制方法 | |
| JP5668770B2 (ja) | ロボットシステム、及び、ロボットシステムの制御方法 | |
| US5378969A (en) | Navigation control system for mobile robot | |
| JP4291385B2 (ja) | ロボット手先部の速度に基づいてロボットを停止させるロボット制御装置 | |
| JP2010120139A (ja) | 産業用ロボットの安全制御装置 | |
| JP2007316799A (ja) | 学習機能をもつ自律移動ロボット | |
| JP6729773B2 (ja) | ロボット制御装置およびこれを用いたロボットシステム | |
| CN110856932A (zh) | 干涉回避装置以及机器人系统 | |
| JP6478771B2 (ja) | 産業用ロボットの回避軌道生成装置および回避軌道生成方法 | |
| CN110948468B (zh) | 机器人的控制方法和控制装置 | |
| JP2018062026A (ja) | ロボットの速度や加速度を制限する機能を備えたロボット制御装置 | |
| US11279034B2 (en) | Position monitoring of a kinematic linkage | |
| EP3418835B1 (en) | Work region estimation device, control device, control system, work region estimation method, and program | |
| JP2010094765A (ja) | ロボットの原点復帰装置 | |
| CN107735226B (zh) | 利用机器人驶过预设的轨迹 | |
| JP6490031B2 (ja) | ロボットの制御装置および制御方法 | |
| JP2003330538A (ja) | 自律移動ロボットおよびその自律移動方法 | |
| JP7384602B2 (ja) | ロボット制御装置 | |
| JP2016185586A (ja) | ロボット装置の制御方法、ロボット装置、およびロボット操作装置 | |
| JP4723991B2 (ja) | 加工面方向を考慮した送り軸加減速機能を有する数値制御装置 | |
| JPS60138611A (ja) | ア−ムロボツトの制御装置 | |
| JP7371878B2 (ja) | ロボット、ロボットシステム、およびロボット制御プログラム | |
| JP2506418B2 (ja) | ロボットの制御装置 | |
| JPH05285868A (ja) | 脚式移動ロボットの歩行制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180117 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180117 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20180117 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20180328 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180508 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180605 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6351900 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |